Пристрій для контролю кутових деформацій валів обертових об’єктів
Номер патенту: 12090
Опубліковано: 25.12.1996
Автори: Фрідман Борис Петрович, Жернаков Володимир Сергійович
Формула / Реферат
Устройство для контроля угловых деформаций валов вращающихся объектов, содержащее два диамагнитных диска с закрепленными на периферии кольцами из намагничивающего материала, предназначенные для установки на вал, две магнитные головки стационарно устанавливаемые против колец, стабилизированный блок питания, триггер, дифференцирующий блок, инвертирующий усилитель с прямым и инверсным выходами, вход которого соединен с выходом дифференцирующего блока, электронно-лучевой индикатор с модулятором яркости и пластинами горизонтального и вертикального отклонения луча, и два согласующих усилителя, выходы которых соединены соответственно с пластинами горизонтального и вертикального отклонения луча, отличающееся тем, что, с целью расширения функциональных возможностей устройства для исследования временной и фазовой неравномерности деформаций валов с оперативным отображением результатов контроля, оно снабжено стабилизированным по частоте вращения электромеханическим приводом с источником питания, торсионным валом с утолщенными окончаниями, предназначенным для установки между валом электромеханического привода и палом исследуемого вращающегося объекта, двумя муфтами, устанавливаемыми на утолщенных окончаниях торсионного вала и соединяемыми соответственно с валами привода и объекта синусно-косинусным потенциометрическим преобразователем угла поворота вала, установленным на утолщенном окончании торсионного вала, обращенном к приводу, и соединенным своими выходами соответственно с входами согласующих усилителей, двумя импульсными усилителями с трехпозиционными переключателями записи - воспроизведения на входе п выходе каждого усилителя, импульсным генератором стабилизированной частоты, генератором напряжения стирания, ключевым элементом, вход которого соединен с выходом триггера, стабилизатором зарядного тока, соединенным своим входом со стабилизированным блоком питания, емкостным накопителем, вход которого соединен с выходами ключевого элемента и стабилизатора зарядного тока, оконечным усилителем, вход которого соединен с выходом ключевого элемента, а выход - с входом дифференцирующего блока, переключателем режима подсветки, входы которого соединены с выходами инвертирующего усилителя, и резистивно-емкостным делителем, входы которого соединены соответственно с блоком питания и общим выходом переключателя режима подсветки, а выход - с модулятором яркости электронно-лучевого индикатора, электронно-лучевой индикатор выполнен с дополнительным электродом радиального отклонения луча, соединенным с выходом оконечного усилителя, подвижные контакты всех четырех переключателей записи - воспроизведения механически соединены между собой, неподвижные контакты первой позиции переключателей на входах импульсных усилителей соединены соответственно с магнитными головками, а переключателей на выходах импульсных усилителей - с входами триггера, неподвижные контакты второй и третьей позиции каждого переключателя из входе импульсного усилителя соединены соответственно с импульсным генератором и генератором стирающего напряжения, те же контакты каждого переключателя на выходе импульсного усилителя соединены между собой и подключены к соответствующей магнитной головке, а дна магнитные диски установлены на утолщенных основаниях торсионного вала.
Текст
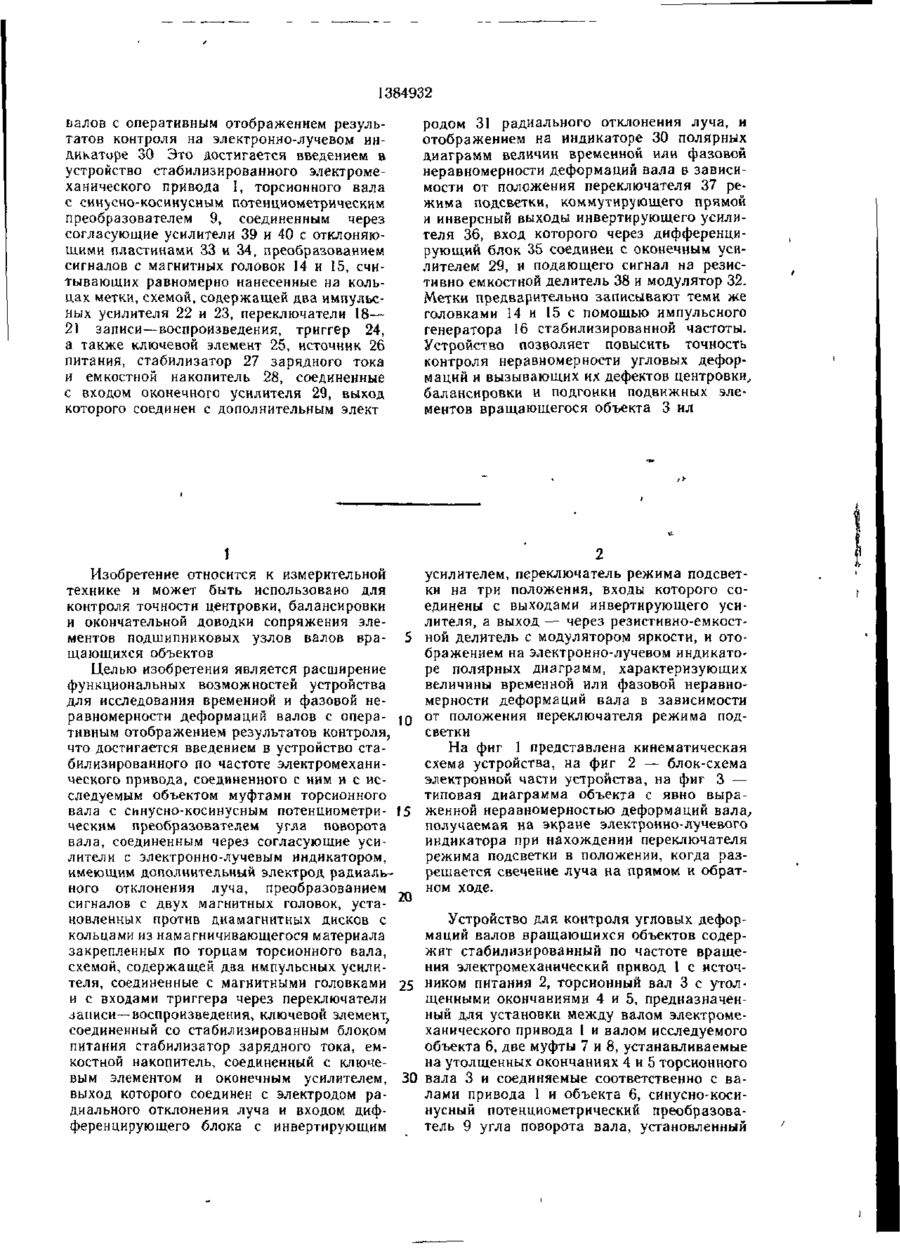
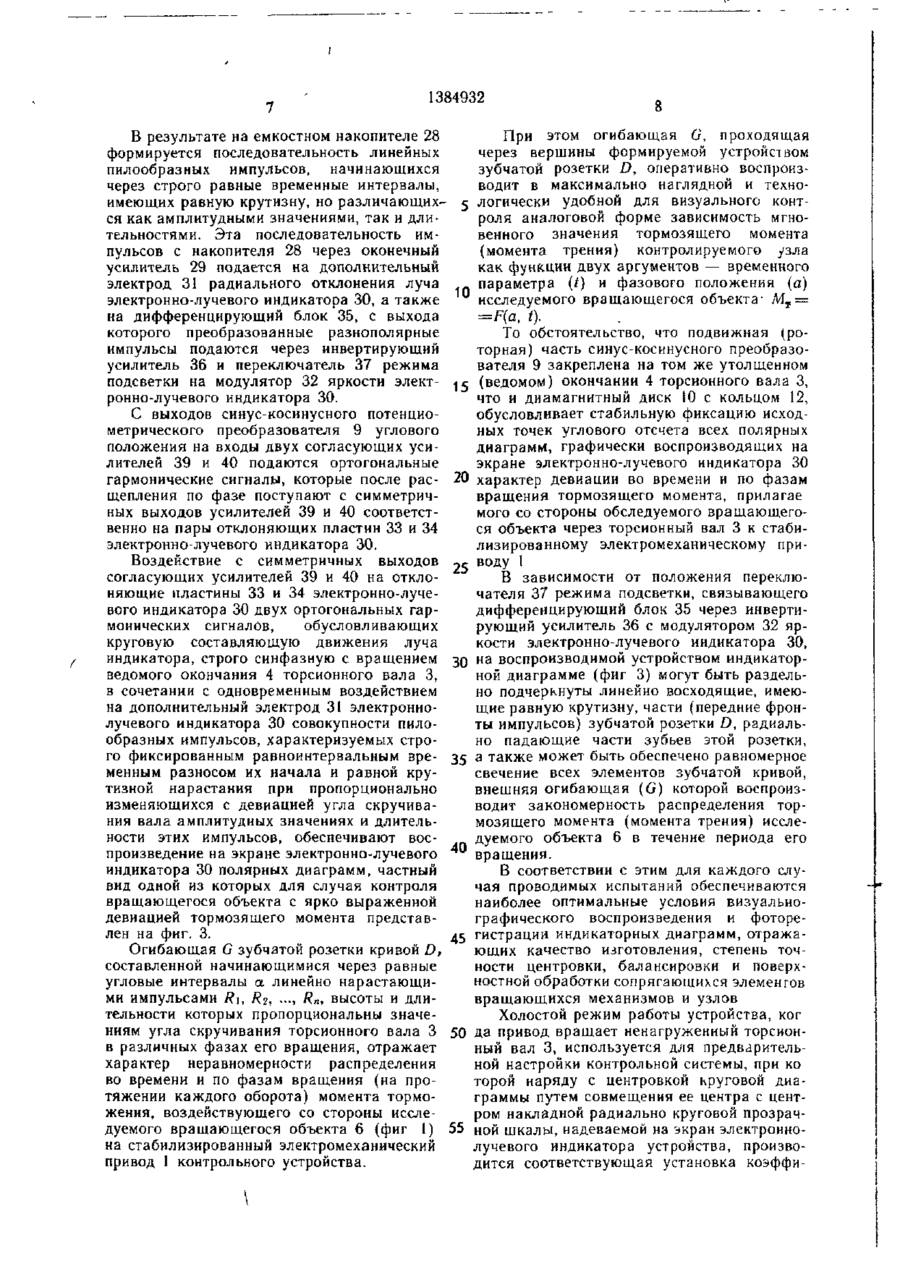
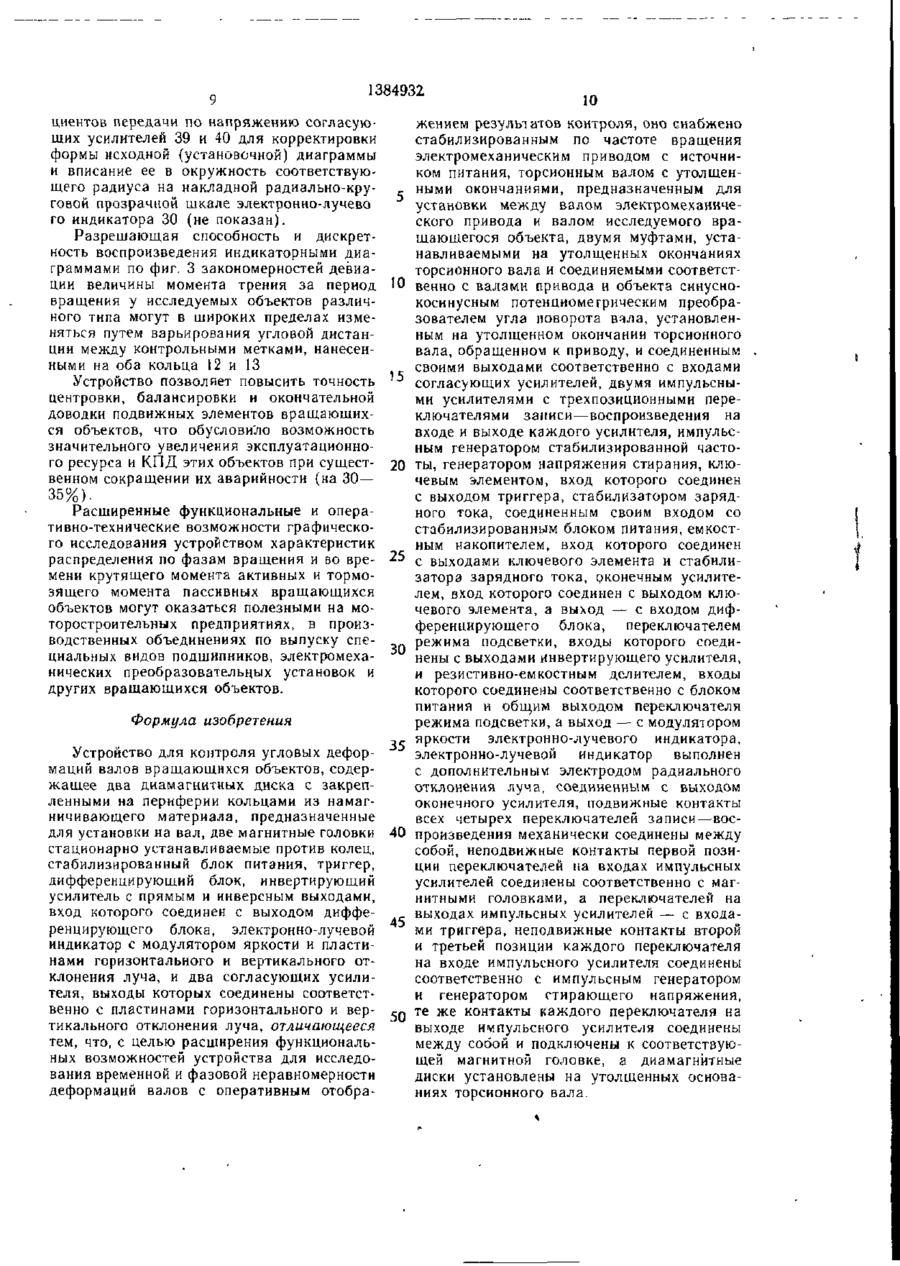
Изобретение относится к средствам измерения угловых деформаций валов вращающихся объектов и может быть использовано для контроля точности центровки, балансировки и окончательной доводки сопряжения элементов подшипниковых у:>лов и механизмов в сборе. Цель изобретения — расширение функциональных возможностей устройства для исследования временной и фазовой неравномерности деформаций С со со 00 Фиг. 2 1384932 валов с оперативным отображением результатов контроля на электронно-лучевом индикаторе 30 Это достигается введением в устройство стабилизированного электромеханического привода 1, торсионного вала с синусно-косинусным потенциометрическим преобразователем 9, соединенным через согласующие усилители 39 и 40 с отклоняющими пластинами 33 и 34, преобразованием сигналов с магнитных головок 14 и 15, считывающих равномерно нанесенные на кольцах метки, схемой, содержащей два импульсных усилителя 22 и 23, переключатели 18— 21 записи—воспроизведения, триггер 24, а также ключевой элемент 25, источник 26 питания, стабилизатор 27 зарядного тока и емкостной накопитель 28, соединенные с входом оконечного усилителя 29, выход которого соединен с дополнительным элект родом 31 радиального отклонения луча, и отображением на индикаторе 30 полярных диаграмм величин временной или фазовой неравномерности деформаций вала в зависимости от положения переключателя 37 режима подсветки, коммутирующего прямой и инверсный выходы инвертирующего усилителя 36, вход которого через дифференцирующий блок 35 соединен с оконечным усилителем 29, и подающего сигнал на резистивно емкостной делитель 38 и модулятор 32. Метки предварительно записывают теми же головками 14 и 15 с помощью импульсного генератора 16 стабилизированной частоты. Устройство позволяет повысить точность контроля неравномерности угловых деформаций и вызывающих их дефектов центровки, балансировки и подгонки подвижных элементов вращающегося объекта 3 ил Ї Изобретение относится к измерительной технике и может быть использовано для контроля точности центровки, балансировки и окончательной доводки сопряжения элементов подшипниковых узлов валов вра- 5 щающихся объектов Целью изобретения является расширение функциональных возможностей устройства для исследования временной и фазовой неравномерности деформаций валов с опера- ]Q тивным отображением результатов контроля, что достигается введением в устройство стабилизированного по частоте электромеханического привода, соединенного с ним и с исследуемым объектом муфтами торсионного вала с синусно-косинусным потенциометри- 15 ческим преобразователем угла поворота вала, соединенным через согласующие усилители с электронно-лучевым индикатором, имеющим дополнительный электрод радиального отклонения луча, преобразованием сигналов с двух магнитных головок, уста- 20 новленных против диамагнитных дисков с кольцами из намагничивающегося материала закрепленных по торцам торсионного вала, схемой, содержащей два импульсных усилителя, соединенные с магнитными головками 25 и с входами триггера через переключатели записи—воспроизведения, ключевой элемент, соединенный со стабилизированным блоком питания стабилизатор зарядного тока, емкостной накопитель, соединенный с ключевым элементом и оконечным усилителем, 30 выход которого соединен с электродом радиального отклонения луча и входом дифференцирующего блока с инвертирующим усилителем, переключатель режима подсветки на три положения, входы которого соединены с выходами инвертирующего усилителя, а выход — через резистивно-емкостной делитель с модулятором яркости, и отображением на электронно-лучевом индикаторе полярных диаграмм, характеризующих величины временной или фазовой неравномерности деформаций вала в зависимости от положения переключателя режима подсветки На фиг 1 представлена кинематическая схема устройства, на фиг 2 — блок-схема электронной части устройства, на фиг 3 — типовая диаграмма объекта с явно выраженной неравномерностью деформаций вала, получаемая на экране электронно-лучевого индикатора при нахождении переключателя режима подсветки в положении, когда разрешается свечение луча на прямом и обратном ходе. Устройство для контроля угловых деформаций валов вращающихся объектов содержит стабилизированный по частоте вращения электромеханический привод 1 с источником питания 2, торсионный вал 3 с утолщенными окончаниями 4 и 5, предназначенный для установки между валом электромеханического привода 1 и валом исследуемого объекта 6,две муфты 7 и 8, устанавливаемые на утолщенных окончаниях 4 и 5 торсионного вала 3 и соединяемые соответственно с валами привода 1 и объекта 6, синусно-косинусный потенциометрический преобразователь 9 угла поворота вала, установленный 1384932 выходами импульсных усилителей 22 и 23, иа утолщенном основании 4 торсионного соединены с установочными входами тригвала 3, два диамагнитных диска 10 и 11 гера 24. с закрепленными на периферии кольцами 12 и 13 из намагничивающегося материала, Устройство для контроля угловых дефордве магнитные головки 14 и 15, стационарно маций валов вращающихся объектов рабоустанавливаемые против колец 12 и 13, имтает следующим образом. пульсный генератор 16 стабилизированной Предварительно перед присоединением частоты, генератор !7 напряжения стирания, к устройству (фиг. 1) вала подлежащего четыре трехпозиционных переключателя 18— контролю вращающегося объекта б, когда 21 записи—воспроизедения, подвижные конторсионный вал 3 не нагружен, на кольца 12 такты которых механически соединены меж- 10 и 13 диамагнитных дисков 10 и 11 с помощью ду собой, два импульсных усилителя 22 и 23, магнитных головок 14 и 15 синхронно нановходы и выходы которых соединены соотсятся равнойнтервальные контрольные метветственно с одним из подвижных контактов ки, для чего переключатели 18—21 (фиг. 2) одного из переключателей 18—-21 з а п и с и устанавливаются во вторую позицию воспроизведения, триггер 24, ключевой эле- ,^ Последовательно поворачивая торсион-' мент 25, вход которого соединен с выходом ный вал 3 на равные угловые интервалы триггера 24, стабилизированный блок 26 (в частности, с помощью делительной головпитания, стабилизатор 27 зарядного тока, ки, не показана) с выхода импульсного гесоединенный входом со стабилизированным нератора 16, работающего в режиме внешнеблоком 26 питания, емкостной накопитель 28, го ручного запуска подают единичные имоконечный усилитель 29, вход которого со- 20 пульсы тока параллельно на обе магнитные единен с выходами ключевого элемента 25 головки 14 и 15 при каждом фиксированном и стабилизатора 27 зарядного тока и емкостугловом положении диамагнитных дисков 10 ным накопителем 28, электронно-лучевой и 11, посаженных соответственно на утолиндикатор 30 с дополнительным электрощенные окончания 4 и 5 торсионного вала 3. дом 31 радиального отклонения луча, модуЗатем подлежащий исследованию вралятором 32 яркости и пластинами 33 и 34 щающийся объект 6, в качестве которого горизонтального и вертикального отклонемогут испытываться как различные центриния луча, дифференцирующий блок 35, вход рующие узлы (радиальные и упорные подкоторого соединен с выходом оконечного шипники трения, качения), так и электромеусилителя 29 и дополнительным электроханические преобразовательные aj pej аты дом 31 радиального отклонения луча, инвер- ^п и другие пассивные вращающиеся объекты. тирующий усилитель 36 с прямым и инверсс помощью муфты 8 присоединяется к торным выходами, переключатель 37 режима сионному валу 3, связанному через муфту 7 подсветки на три положения, входы которого с валом стабилизированного электромеханисоединены с прямым и инверсным выходами ческого привода 1. инвертирующего усилителя 36, а выход соПереключатели 18—21 переводят в перединен с блоком 38 и модулятором 32 яркос- 35 вую позицию и тумблером включают электти, и согласующие усилители 39 и 40, входы ромеханический привод 1, вращение которокоторых соединены с выходами синусного через торсионный вал 3 передается испыкосинусного потенциометрического преобтуемому объекту 6 разователя 9, а выходы соответственно — При вращении нагруженного контролис пластинами 33 и 34 горизонтального и верруемым объектом 6 торсионного вала 3 возтикального отклонения луча электронно- 40 никающие в нем крутильные деформации лучевого индикатора 30. отражают закон изменения тормозящего момента, воздействующего со с троны враНеподвижные контакты первой позиции щаемого объекта 6. Неравномерность же переключателей 18 и 19 записи—воспроизраспределения з течение периода вращения ведения, соединенных с входами импульсных тормозящего момента, воздействующего со усилителей 22 и 23,а также неподвижные 45 стороны исследуемого объекта 6 на торсионконтакты второй и третьей позиций переклюный вал 3, обусловлена наряду с неточностью чателей 20 и 21 записи—воспроизведения, исполнения и центровки подвижной части соединенных с выходами импульсных усиобъекта также имеющими обычно место лителей 22 и 2t3, соединены соответственно дисбалансом и неравномерностью момента с магнитными головками 14 и 15. Неподвиж- rg трения, связанной с нарушением сопряжения ные контакты второй позиции переключамежду взаимно контактирующими элементелей 18 и 19 записи—воспроизведения сотами и узлами вращающегося объекта. единены с импульсным генератором 16 стабилизированной частоты, а неподвижные В соответствии с изменениями угловых контакты третьей позиции тех же переклюдеформаций торсионного вала 3 в процессе й чателей 18 и 19 соединены с генератором 17 55 его динамического нагружепия вращающимнапряжения стирания. Неподвижные контакся объектом 6 будут взаимно смешаться ты первой позиции переключателей 20 и 21 по фазе диамагнитные диски 10 и і 1 с призаписи—воспроизведения, соединенных с крепленными к ним кольцами 12 и 13 При 1384932 этом диамагнитный диск 11 будет отставать по фазе от диамагнитного диска 10 на динамически изменяющийся угол, в то время как скорость вращения диамагнитного диска 10 при любых фазовых девиациях диамагнитного диска 11 будет оставаться постоянной, однозначно определяясь постоянной угловой скоростью вращения стабилизированного привода 1 Синфазные равноинтервальные метки, предварительно нанесенные на кольца 12 и 13 из немагничивающегося материала при ненагруженном торсионном вале 3, в процессе динамического нагружения этого вала исследуемым вращающимся объектом 6 будут взаимно смещаться по фазе на различные углы, отвечающие мгновенным зна- 15 чениям тормозящего усилия, воздействующего в различных фазах вращения от исследуемого объекта 6 на торсионный вал 3 Считываемые магнитной головкой 14 метки с кольца 12 создают в обмотке головки 14 20 периодическую последовательность импульсных ЭДС со строго постоянным интервалом повторения импульсов, обусловленным как равномерным разнесением контрольных меток на кольце 12, так и стабилизированной угловой скоростью вращения электромеха- 25 нического привода 1 В результате считывания магнитной головкой 15 контрольных меток с движущегося с неравномерной скоростью вращения кольца 13 в обмотке головки 15 возбуждается последовательность импульсов, разнесенных 30 на различные временные интервалы один относительно другого и отстающих от соответственно сформированных головкой 14 импульсных сигналов на отрезки времени, соответствующие значениям тормозящего момента, воздействующего от объекта 6 на 35 торсионный вал 3 при различных угловых положениях его ведомого утолщенного окончания 4 Формируемые магнитными головками 14 и 15 ЭДС после прохождения соответственно 40 через импульсные усилители 22 и 23 преобразуются в две последовательности кратковременных импульсных сигналов, раздельно поступающих соответственно на установочные входы триггера 24, один из выходов ко- 45 торого связан с входом управляемого ключевого элемента 25 Емкостный накопитель 28, связанный через стабилизатор 27 зарядного тока со стабилизированным блоком 26 питания устройства, при открытом состоянии управляе- 50 мого ключевого элемента 25 не имеет практически никакого потенциала ввиду шунтирующего действия на накопитель 28 низкоомного проходного сопротивления открытого ключевого элемента 25, полностью нейтрализующего действие на накопитель 28 отно- 55 сительно маломощной зарядной цепи, содержащей стабилизатор 27 зарядного тока При подаче на первый вход триггера 24 кратковременного импульса с выходов импульсного усилителя 22, связанного через переключатель 18 с магнитной головкой 14, функционирующей в режиме считывания, с выхода триггера 24 на вход управляемого ключевого элемента 25 подается запирающее напряжение, которое закрывает этот ключевой элемент 25 и создает условие для плавного линейного нарастания потенциала на накопителе 28 за счет зарядного тока, проходящего через стабилизатор 27 зарядного тока, связанный со стабилизированным блоком 26 питания устройства Линейное нарастание потенциала на емкостном накопителе 28 будет продолжаться до прихода на другой вход триггера 24 кратковременного импульса с выхода усилителя 23, связанного через переключатель 19 с магнитной головкой 15, функционирующей в режиме считывания меток с кольца 13 С приходом кратковременного импульса на другой вход триггера 24 с выхода этого триггера на вход управляемого ключевого элемента 25 поступит потенциал, который откроет ключевой элемент 25 и прервет процесс роста напряжения на накопителе 28, приведя его потенциал к нулю Нулевой потенциал на выходе накопителя 28 будет сохраняться до прихода ближайшего импульса с магнитной головки 14 через импульсный усилитель 22 на первый вход триггера 24, когда ключевой элемент 25 закроется и начнется новое нарастание потенциала на накопителе 28 за счет действия стабилизатора 27 зарядного тока Таким образом, в течение временного интервала между смежными по следованию импульсами, поступающими с головок 14 и 15 через импульсные усилители 22 и 23 на установочные входы триггера 24, при вращении исследуемого объекта 6 на накопителе 28 формируется линейно нарастающий сигнал, амплитудное значение которого строго пропорционально как величине сдвига фаз между граничными сечениями торсионного вала 3, в плоскости которых расположены диамагнитные диски 10 и 11, так и действующему значению тормозящего момента, создаваемого исследуемым вращающимся объектом 6 для стабилизированного по скорости электромеханического привода 1 При считывании в процессе проводимых измерений головкой 14 контрольных меток с кольца 12, а головкой 15 — меток с кольца 13, на первый вход триггера 24 будут поступать кратковременные строго периодические импульсы, в то время как на другой вход триггера 24 будут подаваться кратковременные непериодические импульсы, смещенные на различные временные интервалы относительно соответствующих импульсов, поступающих на первый вход триггера 24. 1384932 При этом огибающая О, проходящая В результате на емкостном накопителе 28 через вершины формируемой устройством формируется последовательность линейных зубчатой розетки D, оперативно воспроизпилообразных импульсов, начинающихся водит в максимально наглядной и техночерез строго равные временные интервалы, имеющих равную крутизну, но различающих- 5 логически удобной для визуального контроля аналоговой форме зависимость мгнося как амплитудными значениями, так и дливенного значения тормозящего момента тельностями. Эта последовательность им(момента трения) контролируемого узла пульсов с накопителя 28 через оконечный как функции двух аргументов — временного усилитель 29 подается на дополнительный параметра (t) и фазового положения (а) электрод 31 радиального отклонения луча исследуемого вращающегося объекта- Мт = электронно-лучевого индикатора 30, а также =F(a, t). на дифференцирующий блок 35, с выхода которого преобразованные разнопол ярные То обстоятельство, что подвижная (роимпульсы подаются через инвертирующий торная) часть синус-косинусного преобразоусилитель 36 и переключатель 37 режима вателя 9 закреплена на том же утолщенном подсветки на модулятор 32 яркости элект- 15 (ведомом) окончании 4 торсионного вала 3, ронно-лучевого индикатора 30. что и диамагнитный диск 10 с кольцом 12, С выходов синус-косинусного потенциообусловливает стабильную фиксацию исходметрического преобразователя 9 углового ных точек углового отсчета всех полярных положения на входы двух согласующих усидиаграмм, графически воспроизводящих на лителей 39 и 40 подаются ортогональные экране электронно-лучевого индикатора 30 гармонические сигналы, которые после рас- 20 характер девиации во времени и по фазам щепления по фазе поступают с симметричвращения тормозящего момента, прилагае ных выходов усилителей 39 и 40 соответстмого со стороны обследуемого вращающеговенно на пары отклоняющих пластин 33 и 34 ся объекта через торсионный вал 3 к стабиэлектронно-лучевого индикатора 30. лизированному электромеханическому приВоздействие с симметричных выходов 25 В°ДУ 1 согласующих усилителей 39 и 40 на отклоВ зависимости от положения переклюняющие пластины 33 и 34 электронно-лучечателя 37 режима подсветки, связывающего вого индикатора 30 двух ортогональных гардифференцирующий блок 35 через инвертимонических сигналов, обусловливающих рующий усилитель 36 с модулятором 32 яркруговую составляющую движения луча кости электронно-лучевого индикатора 30, индикатора, строго синфазную с вращением 30 на воспроизводимой устройством индикаторведомого окончания 4 торсионного вала 3, ной диаграмме (фиг 3) могут быть раздельв сочетании с одновременным воздействием но подчеркнуты линейно восходящие, имеющие равную крутизну, части (передние фронна дополнительный электрод 31 электронноты импульсов) зубчатой розетки D, радиальлучевого индикатора 30 совокупности пилоно падающие части зубьев этой розетки, образных импульсов, характеризуемых строго фиксированным равноинтервальным вре- 35 а также может быть обеспечено равномерное свечение всех элементов зубчатой кривой, менным разносом их начала и равной крувнешняя огибающая (G) которой воспроизтизной нарастания при пропорционально водит закономерность распределения торизменяющихся с девиацией угла скручивамозящего момента (момента трения) иссления вала амплитудных значениях и длительдуемого объекта 6 в течение периода его ности этих импульсов, обеспечивают восвращения. произведение на экране электронно-лучевого В соответствии с этим для каждого слуиндикатора 30 полярных диаграмм, частный чая проводимых испытаний обеспечиваются вид одной из которых для случая контроля наиболее оптимальные условия визуальновращающегося объекта с ярко выраженной графического воспроизведения и фоторедевиацией тормозящего момента представ45 гистраций индикаторных диаграмм, отражален на фиг. 3. ющих качество изготовления, степень точОгибающая G зубчатой розетки кривой D, ности центровки, балансировки и поверхсоставленной начинающимися через равные ностной обработки сопрягающихся элементов угловые интервалы а линейно нарастающивращающихся механизмов и узлов ми импульсами R\, R2, ..., Rn, высоты и длиХолостой режим работы устройства, ког тельности которых пропорциональны значениям угла скручивания торсионного вала 3 50 да привод вращает ненагруженный торсионный вал 3, используется для предварительв различных фазах его вращения, отражает ной настройки контрольной системы, при ко характер неравномерности распределения торой наряду с центровкой круговой диаво времени и по фазам вращения (на программы путем совмещения ее центра с центтяжении каждого оборота) момента тормором накладной радиально круговой прозрачжения, воздействующего со стороны исследуемого вращающегося объекта 6 (фиг 1) 55 ной шкалы, надеваемой на экран электроннолучевого индикатора устройства, произвона стабилизированный электромеханический дится соответствующая установка коэффипривод 1 контрольного устройства. 1384932 циентов передачи по напряжению согласующих усилителей 39 и 40 для корректировки формы исходной (установочной) диаграммы и вписание ее в окружность соответствующего радиуса на накладной радиально-круговой прозрачной шкале электронно-лучево го индикатора 30 (не показан). Разрешающая способность и дискретность воспроизведения индикаторными диаграммами по фиг. 3 закономерностей девиации величины момента трения за период вращения у исследуемых объектов различного типа могут в широких пределах изменяться путем варьирования угловой дистанции между контрольными метками, нанесенными на оба кольца 12 и 13 Устройство позволяет повысить точность центровки, балансировки и окончательной доводки подвижных элементов вращающихся объектов, что обусловило возможность значительного увеличения эксплуатационного ресурса и КПД этих объектов при существенном сокращении их аварийности {на 30— 35%). Расширенные функциональные и оперативно-технические возможности графического исследования устройством характеристик распределения по фазам вращения и во времени крутящего момента активных и тормозящего момента пассивных вращающихся объектов могут оказаться полезными на моторостроительных предприятиях, в производственных объединениях по выпуску специальных видов подшипников, электромеханических преобразовательных установок и других вращающихся объектов. Ї0 15 20 25 30 Формула изобретения Устройство для контроля угловых деформаций валов вращающихся объектов, содержащее два диамагнитных диска с закрепленными на периферии кольцами из намагничивающего материала, предназначенные для установки на вал, две магнитные головки стационарно устанавливаемые против колец, стабилизированный блок питания, триггер, дифференцирующий блок, инвертирующий усилитель с прямым и инверсным выходами, вход которого соединен с выходом дифференцирующего блока, электронно-лучевой индикатор с модулятором яркости и пластинами горизонтального и вертикального отклонения луча, и два согласующих усилителя, выходы которых соединены соответственно с пластинами горизонтального и вертикального отклонения луча, отличающееся тем, что, с целью расширения функциональных возможностей устройства для исследования временной и фазовой неравномерности деформаций валов с оперативным отобра 35 40 45 50 10 жением результатов контроля, оно снабжено стабилизированным по частоте вращения электромеханическим приводом с источником питания, торсионным валом с утолщенными окончаниями, предназначенным для установки между валом электромеханического привода и валом исследуемого вращающегося объекта, двумя муфтами, устанавливаемыми на утолщенных окончаниях торсионного вала и соединяемыми соответственно с валами привода и объекта синуснокосинусным потенциомегрическим преобразователем угла поворота вала, установленным на утолщенном окончании торсионного вала, обращенном к приводу, и соединенным своими выходами соответственно с входами согласующих усилителей, двумя импульсными усилителями с трехпозиционными переключателями записи—воспроизведения на входе и выходе каждого усилителя, импульсным генератором стабилизированной частоты, генератором напряжения стирания, ключевым элементом, вход которого соединен с выходом триггера, стабилизатором зарядного тока, соединенным своим входом со стабилизированным блоком питания, емкостным накопителем, вход которого соединен с выходами ключевого элемента и стабилизатора зарядного тока, рконечным усилителем, вход которого соединен с выходом ключевого элемента, а выход — с входом дифференцирующего блока, переключателем режима подсветки, входы которого соединены с выходами инвертирующего усилителя, и резистивно-емкостным делителем, входы которого соединены соответственно с блоком питания и общим выходом переключателя режима подсветки, а выход — с модулятором яркости электронно-лучевого индикатора, электронно-лучевой индикатор выполнен с дополнительным электродом радиального отклонения луча, соединенным с выходом оконечного усилителя, подвижные контакты всех четырех переключателей записи-—воспроизведения механически соединены между собой, неподвижные контакты первой позиции переключателей па входах импульсных усилителей соединены соответственно с магнитными головками, а переключателей на выходах импульсных усилителей — с входами триггера, неподвижные контакты второй и третьей позиции каждого переключателя на входе импульсного усилителя соединены соответственно с импульсным генератором и генератором стирающего напряжения, те же контакты каждого переключателя на выходе импульсного усилителя соединены между собой и подключены к соответствующей магнитной головке, а диамагнитные диски установлены на утолщенных основаниях торсионного вала. 1384932 Фиг.! Щиг.З Составитель Н Тимошенко Редактор О Спесивых Техред И Верес Корректор М Максимишинец 3dKa3 11 1 9/36 Тираж 680 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва Ж—35 Раушская Н
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for control of angular deformations of shafts of rotary objects
Автори англійськоюFridman Borys Petrovych, Zhernaakov Volodymyr Sergiiovych
Назва патенту російськоюУстройство для контроля угловых деформаций валов вращающихся объектов
Автори російськоюФридман Борис Петрович, Жернаков Владимир Сергеевич
МПК / Мітки
МПК: G01B 7/16, G01M 15/00
Мітки: об'єктів, кутових, деформацій, контролю, пристрій, валів, обертових
Код посилання
<a href="https://ua.patents.su/8-12090-pristrijj-dlya-kontrolyu-kutovikh-deformacijj-valiv-obertovikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Пристрій для контролю кутових деформацій валів обертових об’єктів</a>
Пристрій для вимірювання температури обертових об’єктів
Номер патенту: 3667
Опубліковано: 27.12.1994
Автори: Оніщенко Валентин Павлович, Василенко Віктор Іванович
МПК: G01K 13/00
Мітки: обертових, об'єктів, пристрій, температури, вимірювання
Формула / Реферат:
1. Устройство для измерения температуры вращающихся объектов, содержащее установленные на объекте термочувствительные элементы, соединенные через переключатель с входом усилителя, первые излучатель и приемник излучения, установленный на объекте постоянный магнит, два магнитоуправляемых контакта, регистратор, отличающееся тем, что в него введены установленный на объекте вблизи холодных спаев термочувствительных элементов термокомпенсационный...
Спосіб контролю імпульсів зі сплощенною вершиною та пристрій для його реалізації
Номер патенту: 6349
Опубліковано: 29.12.1994
Автори: Ванько Володимир Михайлович, Дороніна Ольга Михайлівна, Лавров Геннадій Миколайович
МПК: G01R 19/04
Мітки: сплощенною, спосіб, імпульсів, вершиною, реалізації, пристрій, контролю
Формула / Реферат:
1. Способ контроля импульсов с уплощенной вершиной, заключающийся в инвертировании входного сигнала, задержке во времени и суммировании с исходным, сравнении результирующего сигнала с первым опорным уровнем и измерении в моменты перехода этого сигнала с уровня, превышающего по модулю первый опорный, на уровень, меньший по модулю опорного уровня, отличающийся тем, что, с целью расширения функциональных возможностей за счет обеспечения...
Пристрій для контролю середньоквадратичного значення перемінної напруги
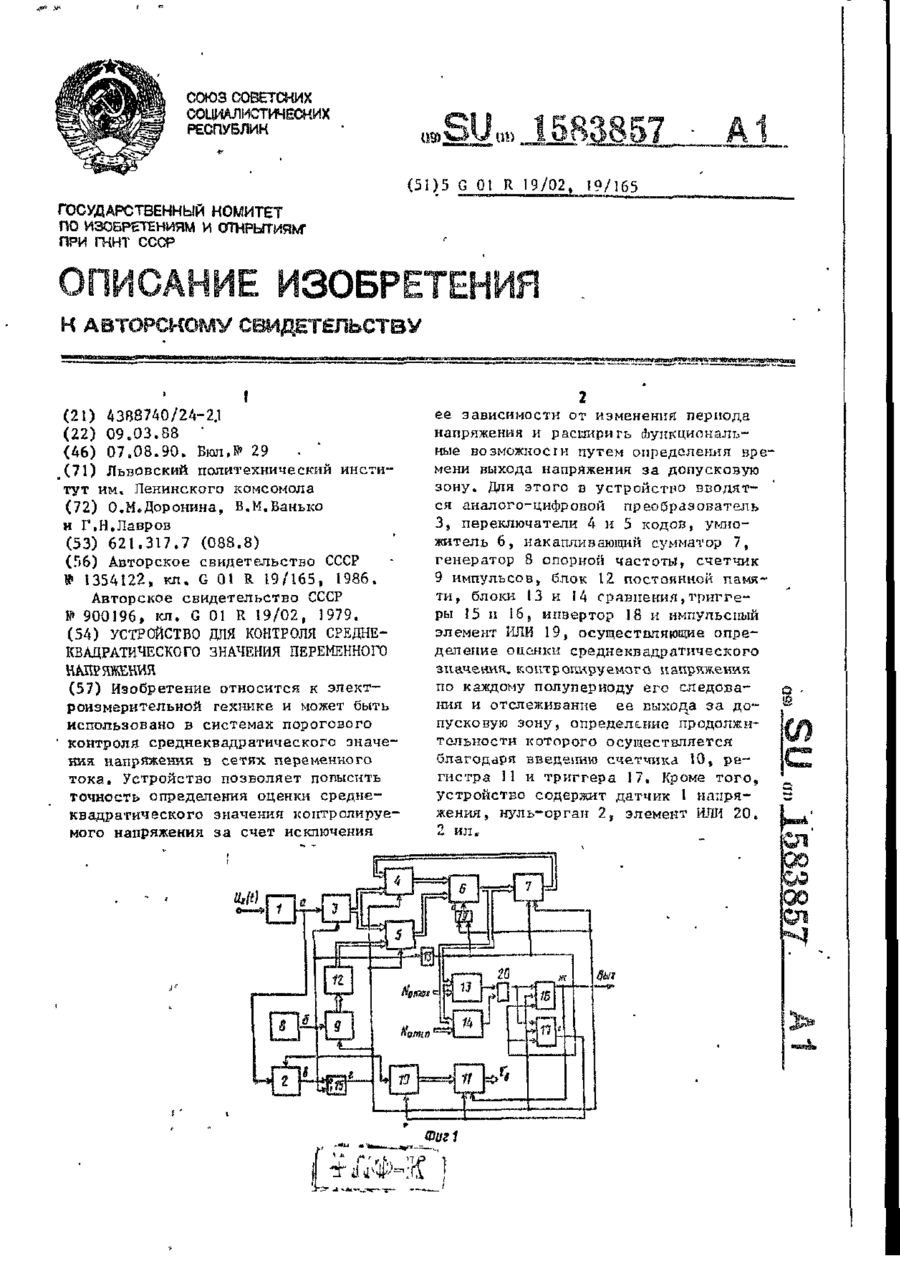
Номер патенту: 6353
Опубліковано: 29.12.1994
Автори: Дороніна Ольга Михайлівна, Лавров Геннадій Миколайович, Ванько Володимир Михайлович
МПК: G01R 19/02, G01R 19/165
Мітки: контролю, перемінної, напруги, значення, середньоквадратичного, пристрій
Формула / Реферат:
Устройство для контроля среднеквадратического значення переменного напряжения, содержащее датчик напряжения, нуль-орган и элемент ИЛИ, причем вход датчика подключен к шине входного напряжения, а выход - к входу нуль-органа, отличающееся тем, что, с целью повышения точности и расширения функциональных возможностей за счет определения времени выхода напряжения за допусковую зону, в него введены аналого-цифровой преобразователь, первый и...
Пристрій для контролю цифрових об’єктів
Номер патенту: 12280
Опубліковано: 25.12.1996
Автори: Чашечніков Валерій Іванович, Михавчук Михайло Іванович, Дем'янчук Тарас Михайлович
МПК: G06F 15/76
Мітки: об'єктів, цифрових, контролю, пристрій
Формула / Реферат:
Устройство для контроля цифровых объектов, содержащее управляющий вычислительный блок, счетчик адреса памяти, блок памяти тестов, регистр адреса тестовой комбинации, регистр выходной тестовой комбинации, многоканальный амплитудный дискриминатор, счетчик числа повторения тестовых комбинаций, первый элемент ЗИ, группу элементов ЗИ, генератор тактовой частоты и схему сравнения, первый, второй входы и выход которой соединены соответственно с...
Пристрій для контролю багатоканального об’єкта
Номер патенту: 6592
Опубліковано: 29.12.1994
Автори: Горшков Борис Генадійович, Радіч Наталія Олександрівна, Скородинський Віктор Хаімович, Данилов Євген Миколайович, Женов Владислав Васильович
МПК: G05B 23/02
Мітки: пристрій, об'єкта, багатоканального, контролю
Формула / Реферат:
(57) Устройство для контроля многоканального объекта, содержащее входной регистр, элемент ИЛИ, формирователь импульса, генератор импульсов и по числу каналов объекта каналы контроля, каждый из которых содержит индикатор состояния канала объекта, триггер ошибки, первый элемент И, первый и второй элементы исключающее ИЛИ, а также блоки согласования управляющих воздействий и ответных реакций, выход и вход каждого из которых являются...
Попередній патент: Фотошаблон
Наступний патент: Виімково-доставлюючий агрегат фронтальної дії
Випадковий патент: Спосіб виготовлення вакцини проти вірусної геморагічної хвороби кролів