Спосіб маркування матеріального тіла, яке рухається, та пристрій для його здійснення
Формула / Реферат
1. Способ маркировки движущегося материального тела, при котором направляют пучок с высокой плотностью энергии на маркируемое тело, концентрируют пучок для получения освещенного пятна на участке, расположенном на движущемся теле или внутри него, перемещают это пятно и управляют его перемещением в соответствии с результирующей двух составляющих движения, первая из которых равна скорости движения тела, а вторая соответствует знаку маркировки заданной формы, отличающийся тем, что дополнительно определяют наличие маркируемого тела на заранее заданном участке на данной траектории до направления пучка с высокой плотностью энергии на тело, а управление перемещением пятна в ответ на наличие тела на заданном участке и управляемое движение пятна начинают в момент падения его на тело на заданном участке.
2. Способ по п.1, отличающийся тем, что дополнительно определяют скорость движения тела.
3. Способ по п.2, отличающийся тем, что скорость движения тела определяют путем непосредственного измерения.
4. Способ по любому из пп.1, 2, 3, отличающийся тем, что пучок излучения с высокой плотностью энергии направляют на движущееся тело в заранее заданный момент времени, который отсчитывают с момента прохождения телом заданной точки, отстоящей на известном расстоянии от точки пересечения траектории движущегося тела с траекторией генерируемого пучка с высокой плотностью энергии.
5. Способ по любому из пп.1 - 4, отличающийся тем, что пучок с высокой плотностью энергии фокусируют в точке внутри стенки движущегося тела и вызывают локальную ионизацию материала тела, при этом создают маркировку в виде области повышенной непрозрачности.
6. Способ по п.5, отличающийся тем, что маркировку выполняют на теле из материала, прозрачного к электромагнитному излучению, с длинами волн видимого диапазона.
7. Способ по п.5, отличающийся тем, что маркировку выполняют на движущемся теле из материала, непрозрачного к электромагнитному излучению, с длинами волн видимого диапазона.
8. Способ по любому из пп.1 - 7, отличающийся тем, что маркировку выполняют в виде одной или более цифр, букв или символов, или их комбинаций.
9. Способ по любому из пп.1 - 8, отличающийся тем, что маркировку выполняют трехмерной.
10. Устройство для маркировки движущегося материального тела, содержащее средства генерирования пучка с высокой плотностью энергии и наведения данного пучка на маркируемое тело, средство концентрации пучка для получения освещенного пятна на участке, расположенном на движущемся теле или внутри него, средство перемещения пятна и средство управления перемещением пятна в соответствии с результирующей двух составляющих движения, первая из которых равна скорости движения тела, а вторая соответствует знаку маркировки заданной формы, отличающееся тем, что оно дополнительно содержит средство обнаружения присутствия маркируемого тела на заданном участке траектории, причем средство управления связано со средством обнаружения для обеспечения начала управляемого перемещения в момент падения пятна на заданном участке.
11. Устройство по п.10, отличающееся тем, что средство перемещения пятна включает в себя средство перемещения пятна в соответствии со второй из двух составляющих движения, содержащее по крайней мере одно подвижное зеркало, расположенное на траектории пучка.
12. Устройство по п.11, отличающееся тем, что средство перемещения пятна в соответствии со второй из двух составляющих движения содержит также программируемое управляющее средство для управления движением по меньшей мере одного подвижного зеркала.
13. Устройство по п.11 или 12, отличающееся тем, что по меньшей мере одно подвижное зеркало выполнено гальванометрическим.
14. Устройство по любому из пп.11 -13, отличающееся тем, что средство перемещения пятна в соответствии со второй из двух составляющих движения выполнено с возможностью перемещения пятна в соответствии с первой из двух составляющих.
15. Устройство по любому из пп.11 - 13, отличающееся тем, что средство перемещения пятна содержит дополнительно средство для перемещения пятна в соответствии с первой из двух составляющих движения.
16. Устройство по п.15, отличающееся тем, что средство для перемещения пятна в соответствии с первой из двух составляющих движения содержит, по крайней мере, одно установленное с возможностью вращения зеркало и средство регулирования скорости вращения зеркала в соответствии со скоростью движения тела.
17. Устройство по п.16, отличающееся тем, что, по меньшей мере, одно зеркало, установленное с возможностью вращения, выполнено многогранным.
18. Устройство по п.15, отличающееся тем, что средство перемещения пятна в соответствии с первой из двух составляющих движения содержит, по меньшей мере, одно подвижное зеркало и средство передвижения этого по меньшей мере одного зеркала со скоростью движения тела.
19. Устройство по п.15, отличающееся тем, что средство перемещения пятна в соответствии с первой из двух составляющих движения содержит, по меньшей мере, один акустооптический или электрооптический кристалл.
20. Устройство по любому из пп.10 - 19, отличающееся тем, что оно дополнительно снабжено средством определения скорости движения тела.
21. Устройство по п.20, отличающееся тем, что средство определения скорости движения тела выполнено с возможностью непосредственного измерения скорости движения тела.
22. Устройство по п.21, отличающееся тем, что средство определения скорости движения тела выполнено с возможностью определения времени прохождения движущимся телом расстояния между двумя оптическими детекторами, расположенными на заданном расстоянии друг от друга.
23. Устройство по любому из пп.10 - 22, отличающееся тем, что средство наведения пучка с высокой плотностью энергии содержит средство для обеспечения пересечения траектории генерированного пучка с высокой плотностью энергии с траекторией движения тела, и средство управления перемещением пятна содержит средство генерирования пучка с высокой плотностью энергии в заданный момент времени после прохождения телом заданной точки, отстоящей на заданном расстоянии от точки пересечения.
24. Устройство по любому из пп.10 - 23, отличающееся тем, что средство концентрации пучка содержит линзовый элемент с переменным фокусным расстоянием по его ширине.
25. Устройство по любому из пп.10 - 24, отличающееся тем, что средство концентрации пучка содержит линзу с изменяющимся фокусным расстоянием.
26. Устройство по пп.10 - 24, отличающееся тем, что средство для концентрации пучка содержит рассеивающую линзу.
27. Устройство по любому из пп.10 - 26, отличающееся тем, что средство генерирования пучка с высокой плотностью энергии выполнено в виде CO2-лазера.
28. Устройство по любому из пп.10 - 26, отличающееся тем, что средство генерирования пучка с высокой плотностью энергии выполнено в виде лазера с пиковой плотностью энергии в фокусе не менее 10Дж/м2.
29. Устройство по любому из пп.10 - 26, отличающееся тем, что средство генерирования пучка с высокой плотностью энергии выполнено в виде лазера с плотностью энергии в фокусе не менее 107вт/см2 и с возможностью работы в импульсном режиме с длительностью импульса не менее 10-6сек.
30. Устройство по любому из пп.10 - 26, отличающееся тем, что средство генерирования пучка с высокой плотностью энергии выполнено в виде Nd-YAG-лазера.
31. Устройство по любому из пп.10 - 30, отличающееся тем, что оно снабжено вспомогательным источником видимого лазерного излучения для юстировки пучка с высокой плотностью энергии.
32. Устройство по любому из пп.10 - 31, отличающееся тем, что оно снабжено конвейерной лентой для транспортировки маркируемого тела.
33. Устройство по п.32, отличающееся тем, что оно снабжено средством для управления поперечным положением маркируемого тела относительно конвейерной ленты.
Текст
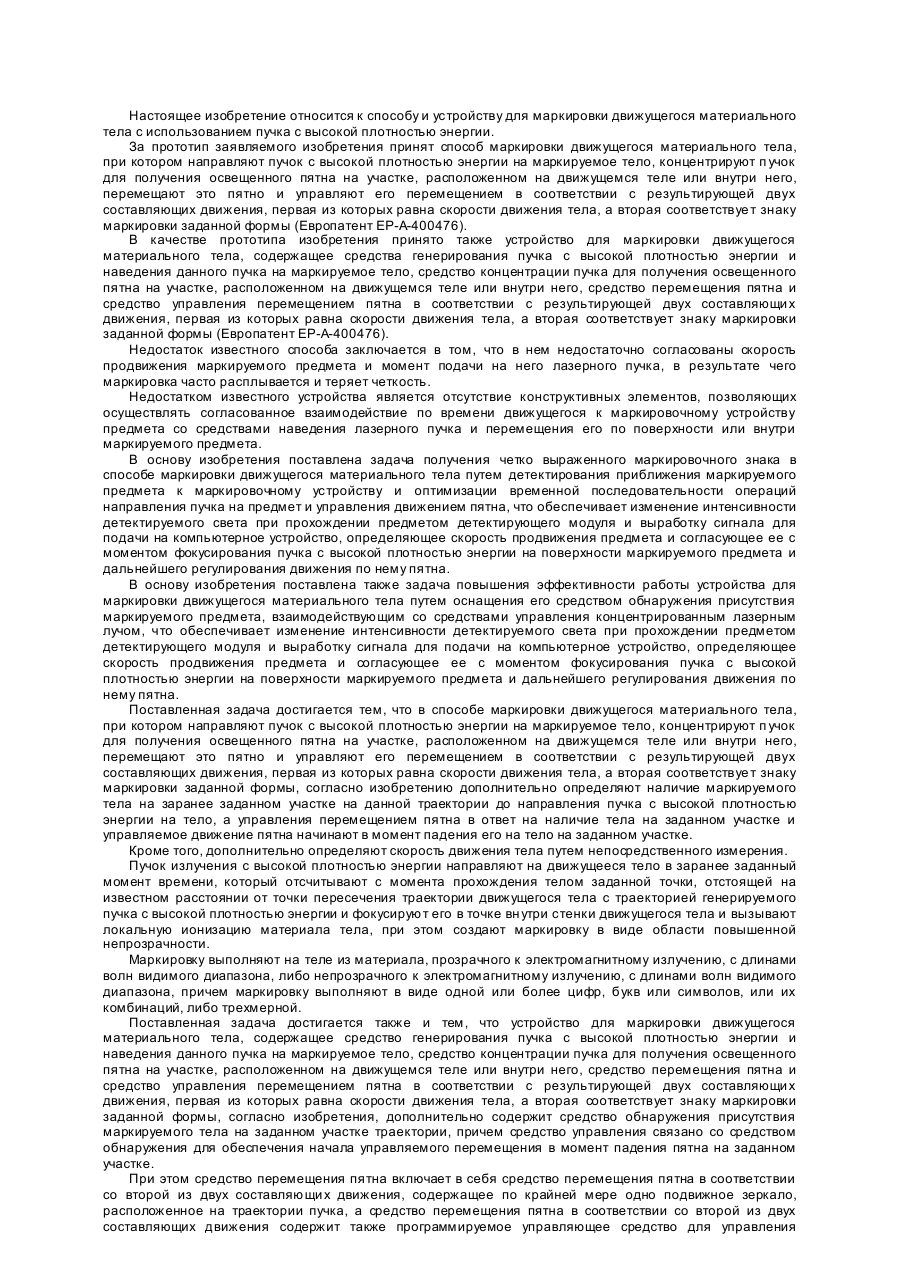
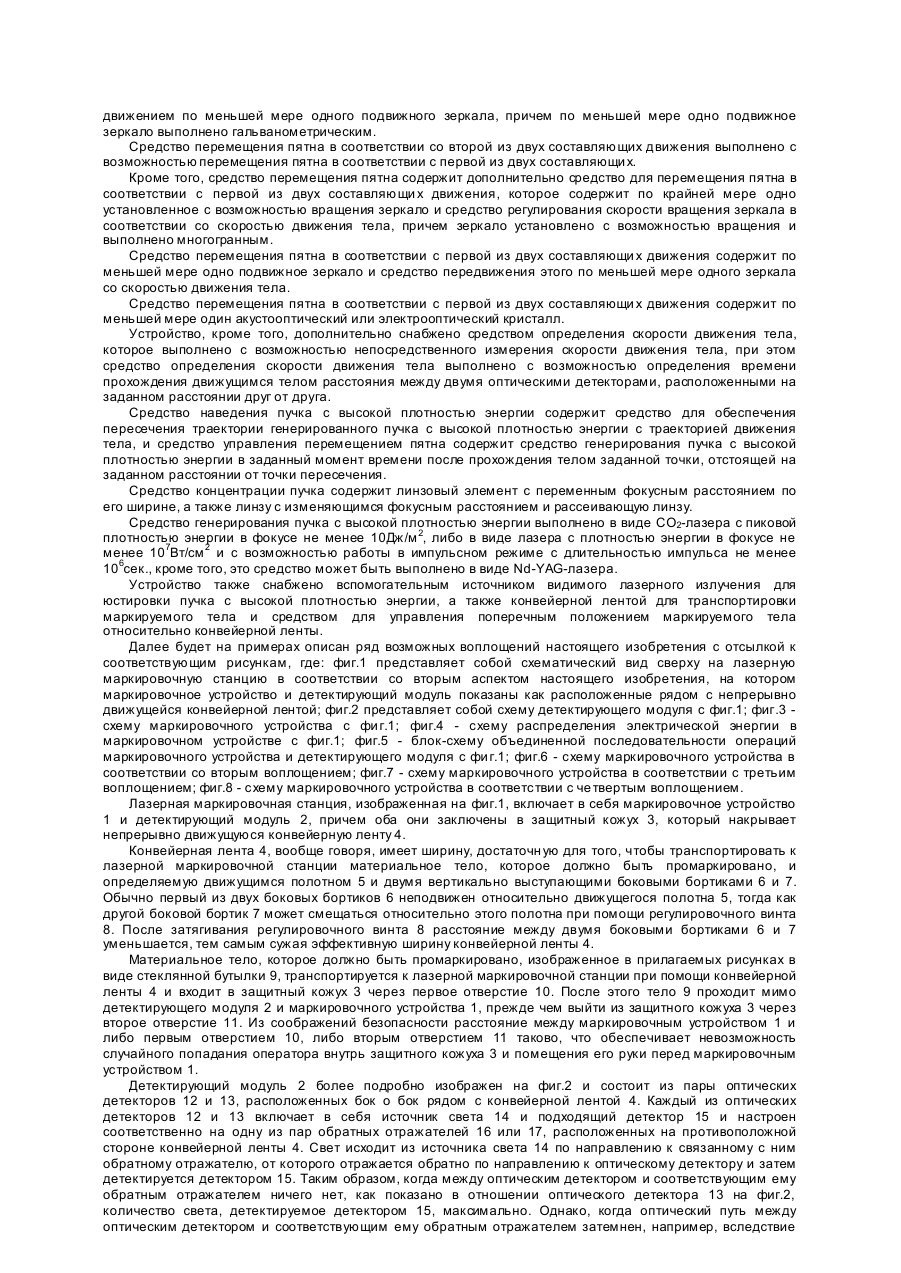
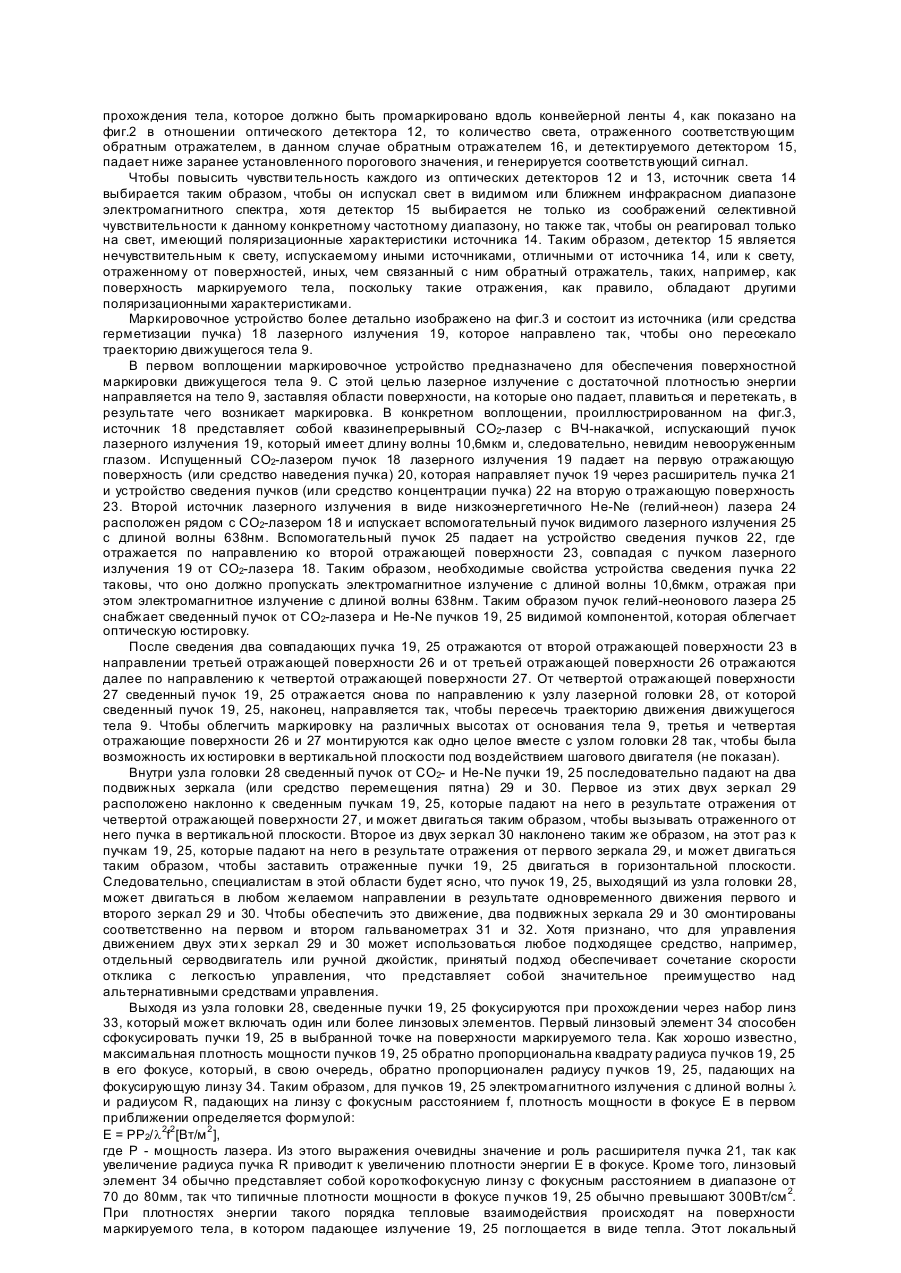
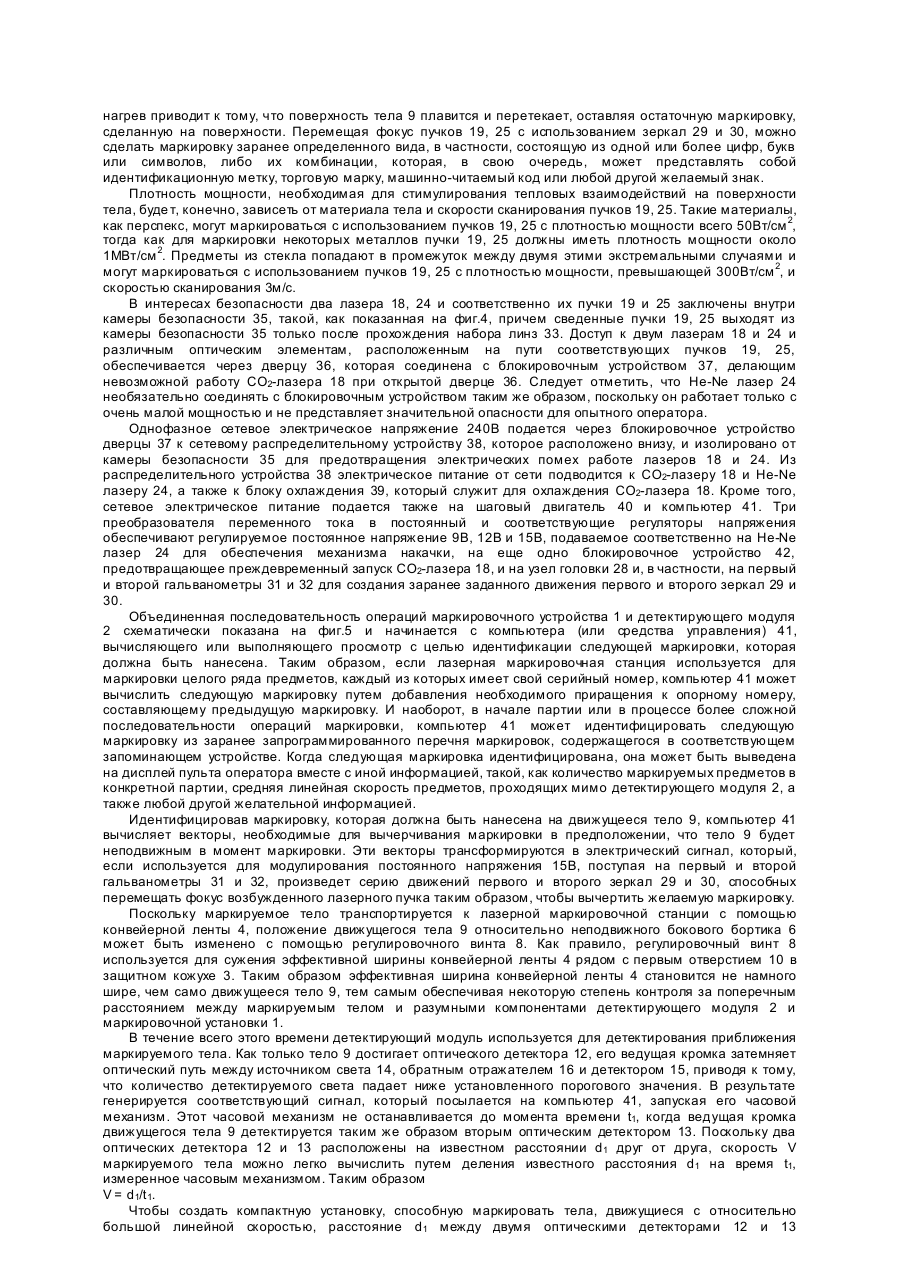
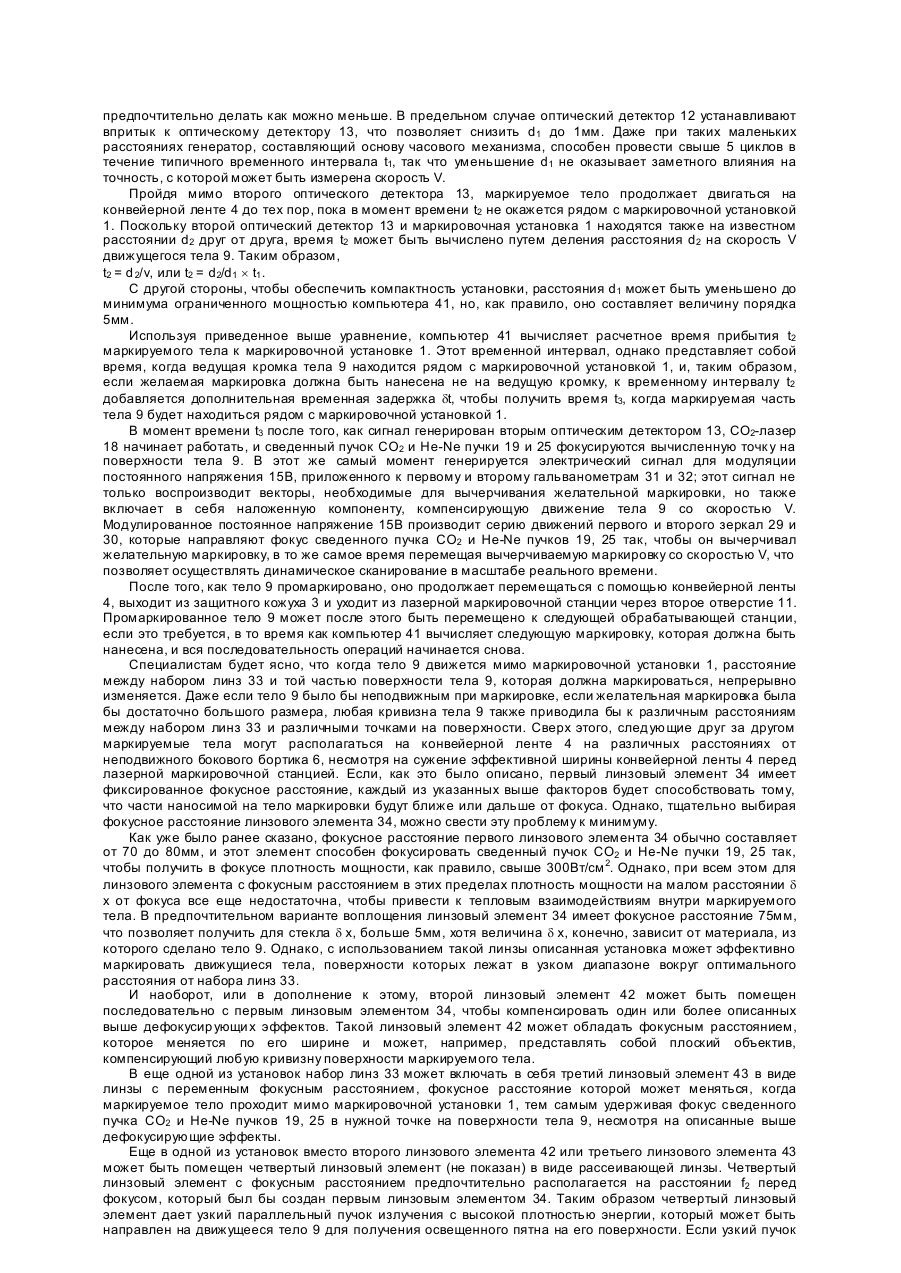
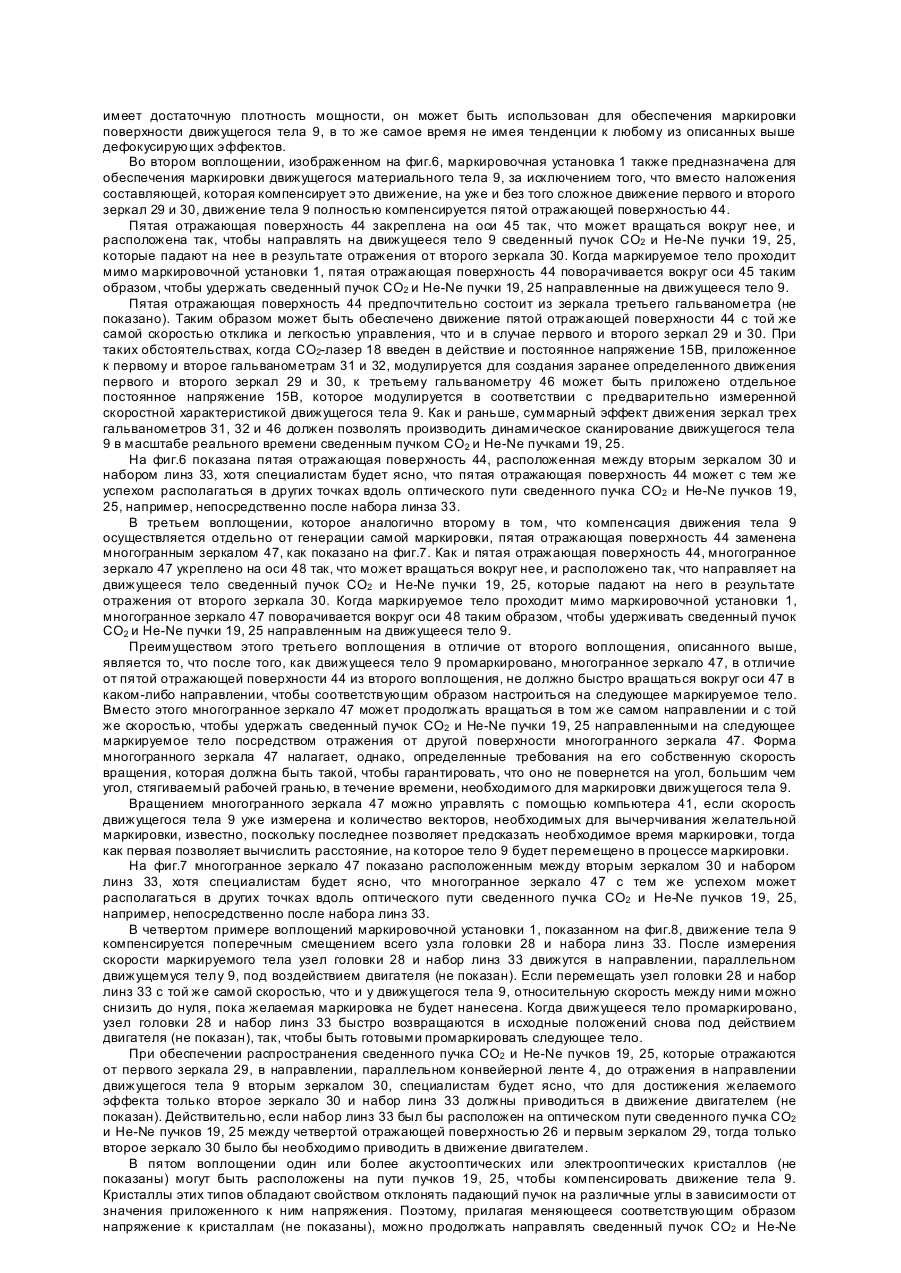
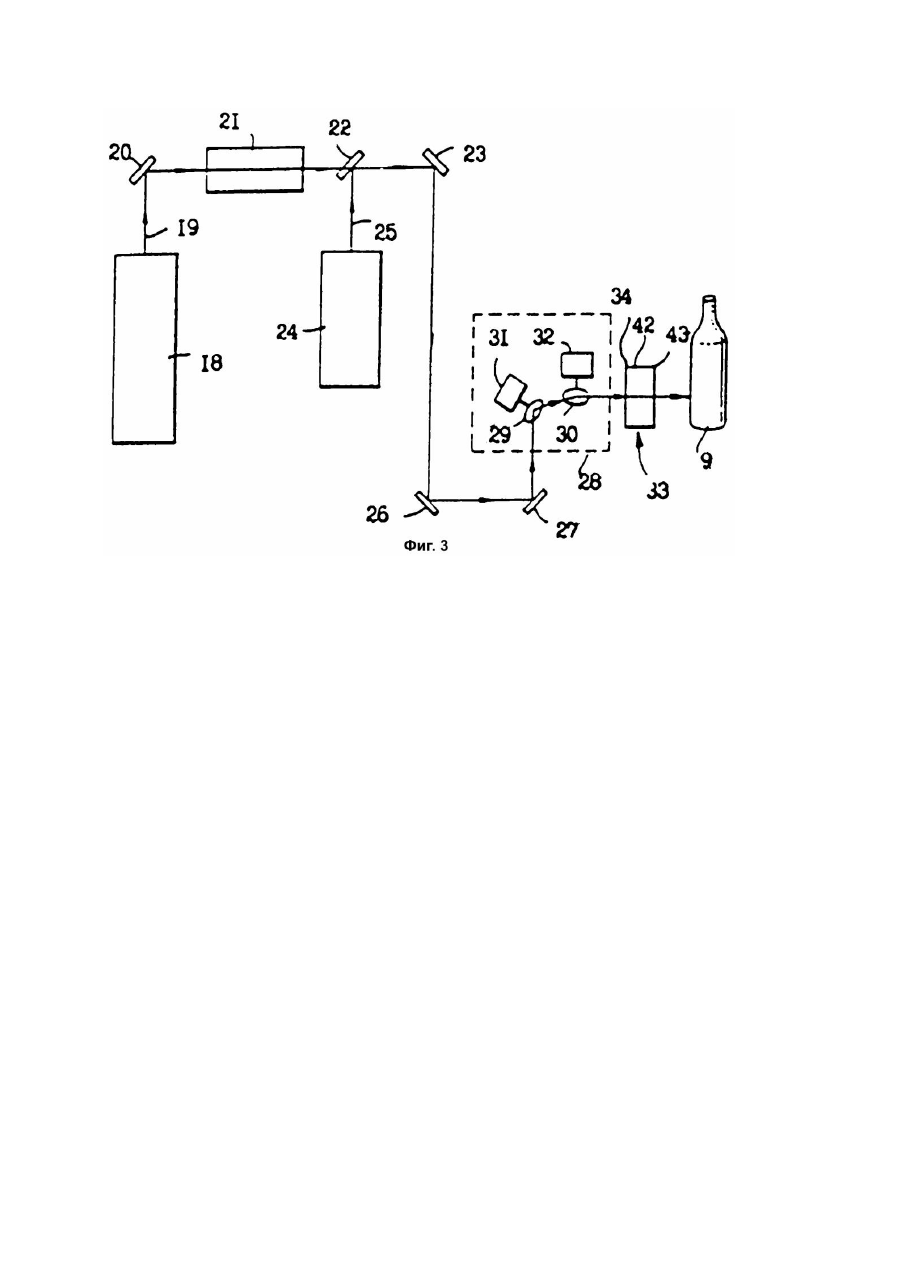
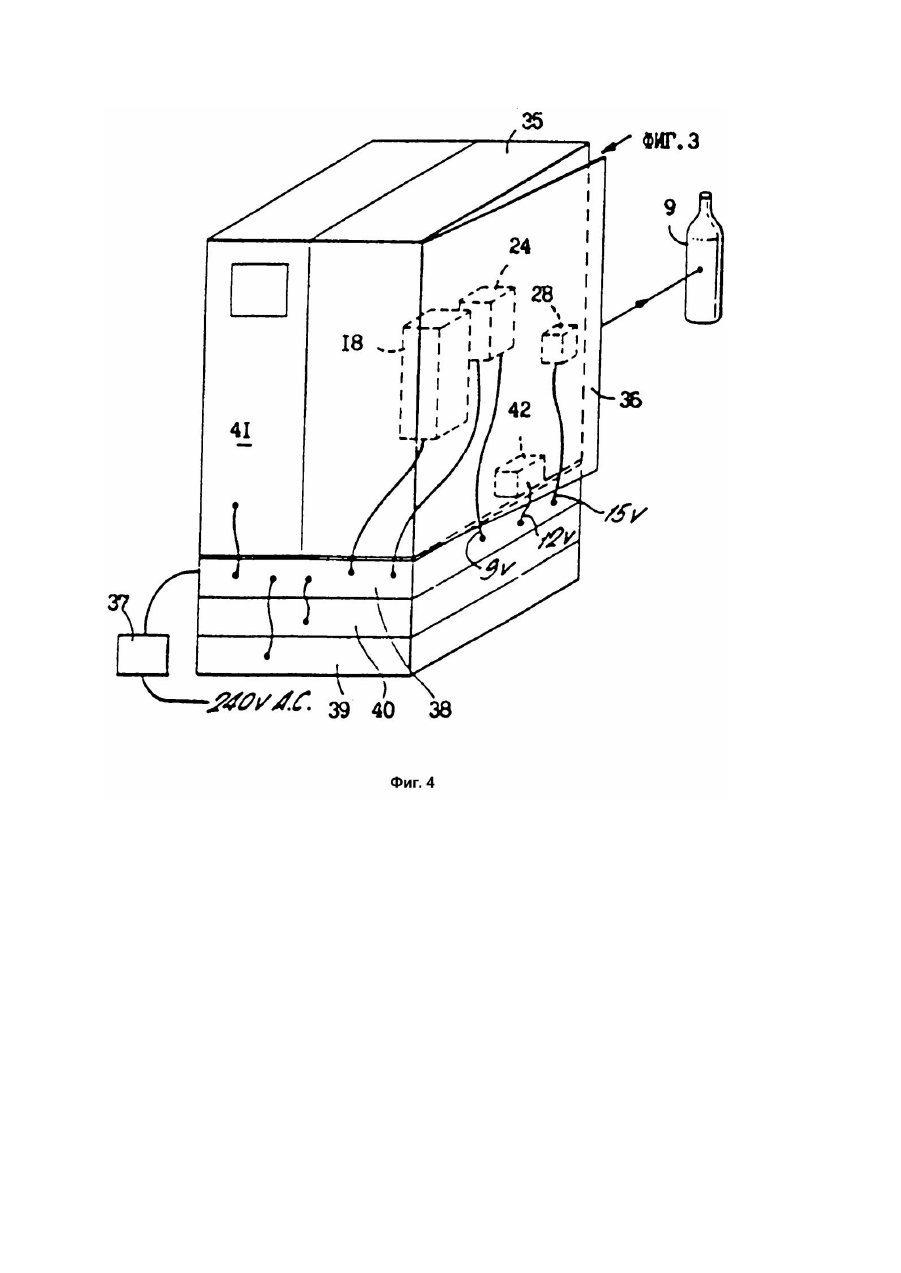
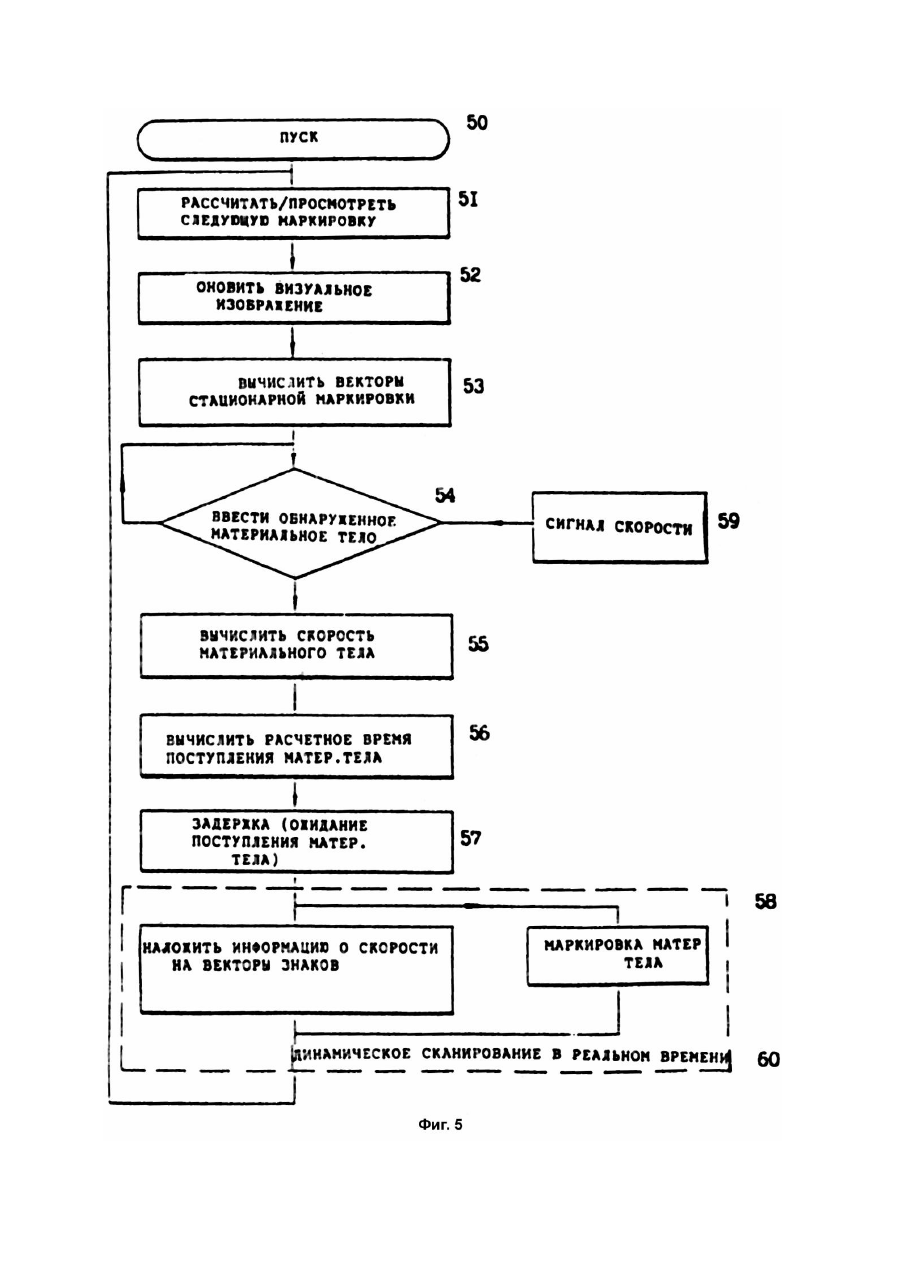
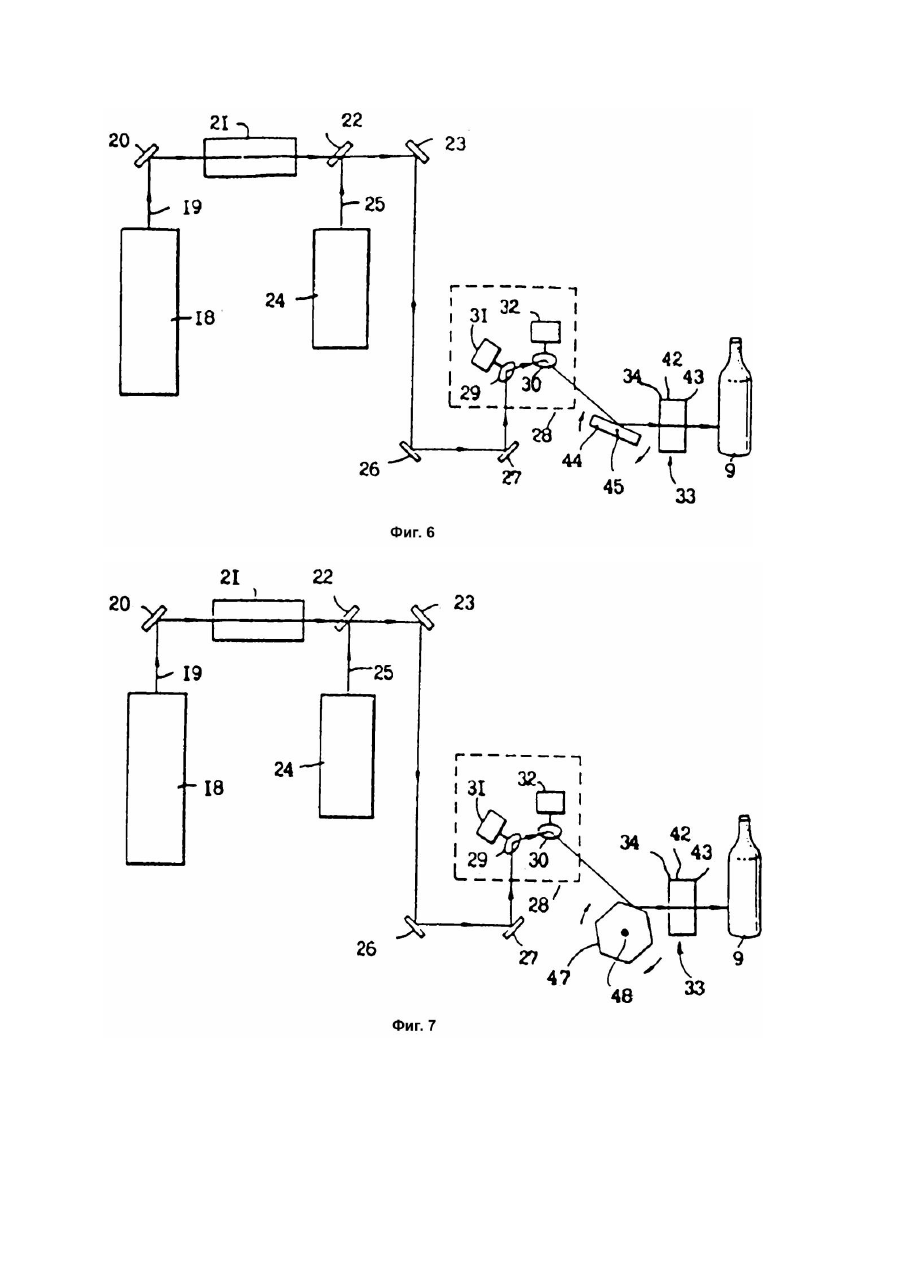
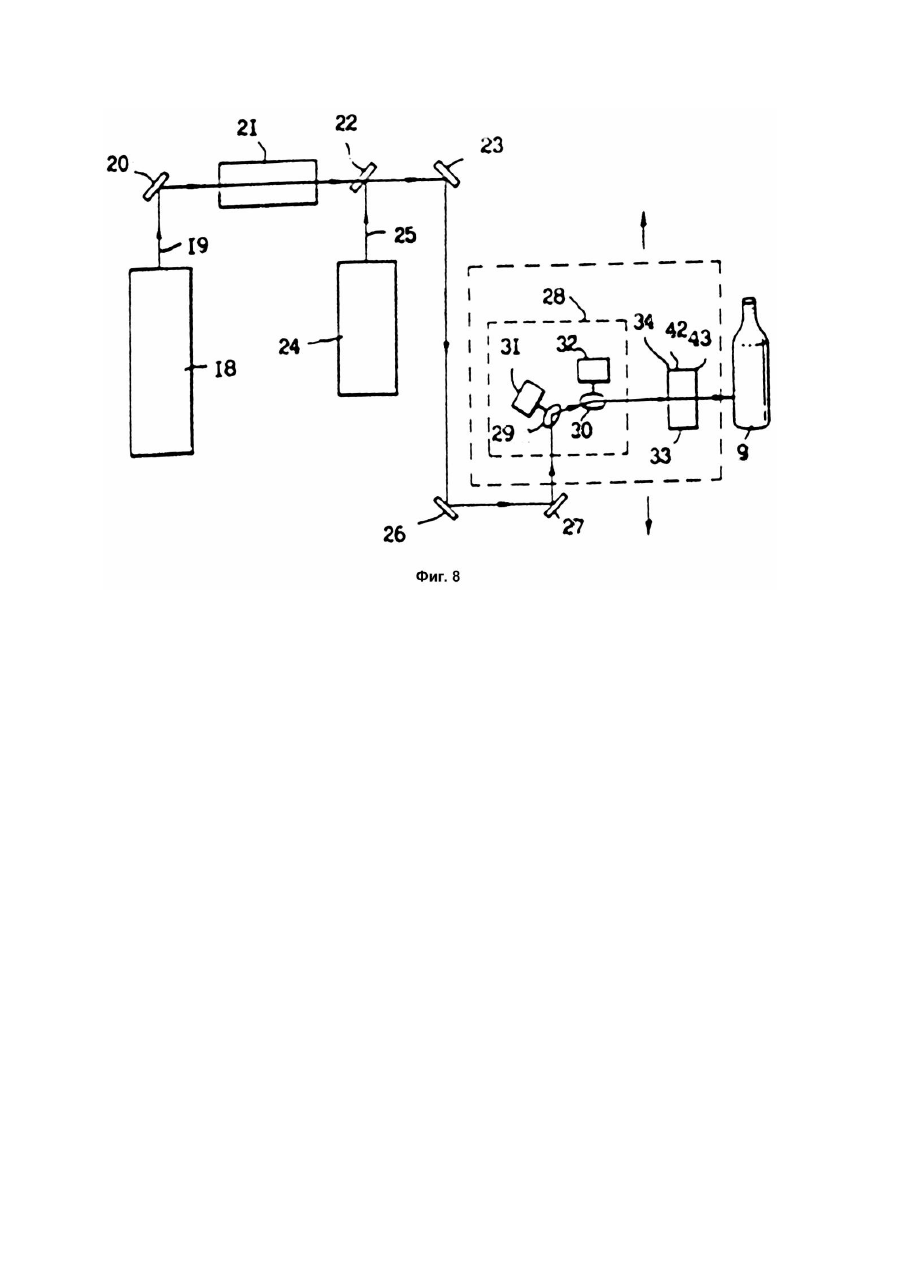
Настоящее изобретение относится к способу и устройству для маркировки движущегося материального тела с использованием пучка с высокой плотностью энергии. За прототип заявляемого изобретения принят способ маркировки движущегося материального тела, при котором направляют пучок с высокой плотностью энергии на маркируемое тело, концентрируют п учок для получения освещенного пятна на участке, расположенном на движущемся теле или внутри него, перемещают это пятно и управляют его перемещением в соответствии с результирующей двух составляющих движения, первая из которых равна скорости движения тела, а вторая соответствуе т знаку маркировки заданной формы (Европатент EP-A-400476). В качестве прототипа изобретения принято также устройство для маркировки движущегося материального тела, содержащее средства генерирования пучка с высокой плотностью энергии и наведения данного пучка на маркируемое тело, средство концентрации пучка для получения освещенного пятна на участке, расположенном на движущемся теле или внутри него, средство перемещения пятна и средство управления перемещением пятна в соответствии с результирующей двух составляющи х движения, первая из которых равна скорости движения тела, а вторая соответствует знаку маркировки заданной формы (Европатент EP-A-400476). Недостаток известного способа заключается в том, что в нем недостаточно согласованы скорость продвижения маркируемого предмета и момент подачи на него лазерного пучка, в результате чего маркировка часто расплывается и теряет четкость. Недостатком известного устройства является отсутствие конструктивных элементов, позволяющих осуществлять согласованное взаимодействие по времени движущегося к маркировочному устройству предмета со средствами наведения лазерного пучка и перемещения его по поверхности или внутри маркируемого предмета. В основу изобретения поставлена задача получения четко выраженного маркировочного знака в способе маркировки движущегося материального тела путем детектирования приближения маркируемого предмета к маркировочному устройству и оптимизации временной последовательности операций направления пучка на предмет и управления движением пятна, что обеспечивает изменение интенсивности детектируемого света при прохождении предметом детектирующего модуля и выработку сигнала для подачи на компьютерное устройство, определяющее скорость продвижения предмета и согласующее ее с моментом фокусирования пучка с высокой плотностью энергии на поверхности маркируемого предмета и дальнейшего регулирования движения по нему пятна. В основу изобретения поставлена также задача повышения эффективности работы устройства для маркировки движущегося материального тела путем оснащения его средством обнаружения присутствия маркируемого предмета, взаимодействующим со средствами управления концентрированным лазерным лучом, что обеспечивает изменение интенсивности детектируемого света при прохождении предметом детектирующего модуля и выработку сигнала для подачи на компьютерное устройство, определяющее скорость продвижения предмета и согласующее ее с моментом фокусирования пучка с высокой плотностью энергии на поверхности маркируемого предмета и дальнейшего регулирования движения по нему пятна. Поставленная задача достигается тем, что в способе маркировки движущегося материального тела, при котором направляют пучок с высокой плотностью энергии на маркируемое тело, концентрируют п учок для получения освещенного пятна на участке, расположенном на движущемся теле или внутри него, перемещают это пятно и управляют его перемещением в соответствии с результирующей двух составляющих движения, первая из которых равна скорости движения тела, а вторая соответствуе т знаку маркировки заданной формы, согласно изобретению дополнительно определяют наличие маркируемого тела на заранее заданном участке на данной траектории до направления пучка с высокой плотностью энергии на тело, а управления перемещением пятна в ответ на наличие тела на заданном участке и управляемое движение пятна начинают в момент падения его на тело на заданном участке. Кроме того, дополнительно определяют скорость движения тела путем непосредственного измерения. Пучок излучения с высокой плотностью энергии направляют на движущееся тело в заранее заданный момент времени, который отсчитывают с момента прохождения телом заданной точки, отстоящей на известном расстоянии от точки пересечения траектории движущегося тела с траекторией генерируемого пучка с высокой плотностью энергии и фокусируют его в точке вн утри стенки движущегося тела и вызывают локальную ионизацию материала тела, при этом создают маркировку в виде области повышенной непрозрачности. Маркировку выполняют на теле из материала, прозрачного к электромагнитному излучению, с длинами волн видимого диапазона, либо непрозрачного к электромагнитному излучению, с длинами волн видимого диапазона, причем маркировку выполняют в виде одной или более цифр, букв или символов, или их комбинаций, либо трехмерной. Поставленная задача достигается также и тем, что устройство для маркировки движущегося материального тела, содержащее средство генерирования пучка с высокой плотностью энергии и наведения данного пучка на маркируемое тело, средство концентрации пучка для получения освещенного пятна на участке, расположенном на движущемся теле или внутри него, средство перемещения пятна и средство управления перемещением пятна в соответствии с результирующей двух составляющи х движения, первая из которых равна скорости движения тела, а вторая соответствует знаку маркировки заданной формы, согласно изобретения, дополнительно содержит средство обнаружения присутствия маркируемого тела на заданном участке траектории, причем средство управления связано со средством обнаружения для обеспечения начала управляемого перемещения в момент падения пятна на заданном участке. При этом средство перемещения пятна включает в себя средство перемещения пятна в соответствии со второй из двух составляющи х движения, содержащее по крайней мере одно подвижное зеркало, расположенное на траектории пучка, а средство перемещения пятна в соответствии со второй из двух составляющих движения содержит также программируемое управляющее средство для управления движением по меньшей мере одного подвижного зеркала, причем по меньшей мере одно подвижное зеркало выполнено гальванометрическим. Средство перемещения пятна в соответствии со второй из двух составляющих движения выполнено с возможностью перемещения пятна в соответствии с первой из двух составляющи х. Кроме того, средство перемещения пятна содержит дополнительно средство для перемещения пятна в соответствии с первой из двух составляющи х движения, которое содержит по крайней мере одно установленное с возможностью вращения зеркало и средство регулирования скорости вращения зеркала в соответствии со скоростью движения тела, причем зеркало установлено с возможностью вращения и выполнено многогранным. Средство перемещения пятна в соответствии с первой из двух составляющи х движения содержит по меньшей мере одно подвижное зеркало и средство передвижения этого по меньшей мере одного зеркала со скоростью движения тела. Средство перемещения пятна в соответствии с первой из двух составляющи х движения содержит по меньшей мере один акустооптический или электрооптический кристалл. Устройство, кроме того, дополнительно снабжено средством определения скорости движения тела, которое выполнено с возможностью непосредственного измерения скорости движения тела, при этом средство определения скорости движения тела выполнено с возможностью определения времени прохождения движущимся телом расстояния между двумя оптическими детекторами, расположенными на заданном расстоянии друг от друга. Средство наведения пучка с высокой плотностью энергии содержит средство для обеспечения пересечения траектории генерированного пучка с высокой плотностью энергии с траекторией движения тела, и средство управления перемещением пятна содержит средство генерирования пучка с высокой плотностью энергии в заданный момент времени после прохождения телом заданной точки, отстоящей на заданном расстоянии от точки пересечения. Средство концентрации пучка содержит линзовый элемент с переменным фокусным расстоянием по его ширине, а также линзу с изменяющимся фокусным расстоянием и рассеивающую линзу. Средство генерирования пучка с высокой плотностью энергии выполнено в виде CO2-лазера с пиковой плотностью энергии в фокусе не менее 10Дж/м 2, либо в виде лазера с плотностью энергии в фокусе не менее 107Вт/см 2 и с возможностью работы в импульсном режиме с длительностью импульса не менее 106сек., кроме того, это средство может быть выполнено в виде Nd-YAG-лазера. Устройство также снабжено вспомогательным источником видимого лазерного излучения для юстировки пучка с высокой плотностью энергии, а также конвейерной лентой для транспортировки маркируемого тела и средством для управления поперечным положением маркируемого тела относительно конвейерной ленты. Далее будет на примерах описан ряд возможных воплощений настоящего изобретения с отсылкой к соответствующим рисункам, где: фиг.1 представляет собой схематический вид сверху на лазерную маркировочную станцию в соответствии со вторым аспектом настоящего изобретения, на котором маркировочное устройство и детектирующий модуль показаны как расположенные рядом с непрерывно движущейся конвейерной лентой; фиг.2 представляет собой схему детектирующего модуля с фиг.1; фиг.3 схему маркировочного устройства с фи г.1; фиг.4 - схему распределения электрической энергии в маркировочном устройстве с фиг.1; фиг.5 - блок-схему объединенной последовательности операций маркировочного устройства и детектирующего модуля с фи г.1; фиг.6 - схему маркировочного устройства в соответствии со вторым воплощением; фиг.7 - схему маркировочного устройства в соответствии с третьим воплощением; фиг.8 - схему маркировочного устройства в соответствии с че твертым воплощением. Лазерная маркировочная станция, изображенная на фиг.1, включает в себя маркировочное устройство 1 и детектирующий модуль 2, причем оба они заключены в защитный кожух 3, который накрывает непрерывно движущуюся конвейерную ленту 4. Конвейерная лента 4, вообще говоря, имеет ширину, достаточн ую для того, чтобы транспортировать к лазерной маркировочной станции материальное тело, которое должно быть промаркировано, и определяемую движущимся полотном 5 и двумя вертикально выступающими боковыми бортиками 6 и 7. Обычно первый из двух боковых бортиков 6 неподвижен относительно движущегося полотна 5, тогда как другой боковой бортик 7 может смещаться относительно этого полотна при помощи регулировочного винта 8. После затягивания регулировочного винта 8 расстояние между двумя боковыми бортиками 6 и 7 уменьшается, тем самым сужая эффективную ширину конвейерной ленты 4. Материальное тело, которое должно быть промаркировано, изображенное в прилагаемых рисунках в виде стеклянной бутылки 9, транспортируется к лазерной маркировочной станции при помощи конвейерной ленты 4 и входит в защитный кожух 3 через первое отверстие 10. После этого тело 9 проходит мимо детектирующего модуля 2 и маркировочного устройства 1, прежде чем выйти из защитного кожуха 3 через второе отверстие 11. Из соображений безопасности расстояние между маркировочным устройством 1 и либо первым отверстием 10, либо вторым отверстием 11 таково, что обеспечивает невозможность случайного попадания оператора внутрь защитного кожуха 3 и помещения его руки перед маркировочным устройством 1. Детектирующий модуль 2 более подробно изображен на фиг.2 и состоит из пары оптических детекторов 12 и 13, расположенных бок о бок рядом с конвейерной лентой 4. Каждый из оптических детекторов 12 и 13 включает в себя источник света 14 и подходящий детектор 15 и настроен соответственно на одну из пар обратных отражателей 16 или 17, расположенных на противоположной стороне конвейерной ленты 4. Свет исходит из источника света 14 по направлению к связанному с ним обратному отражателю, от которого отражается обратно по направлению к оптическому детектору и затем детектируется детектором 15. Таким образом, когда между оптическим детектором и соответствующим ему обратным отражателем ничего нет, как показано в отношении оптического детектора 13 на фиг.2, количество света, детектируемое детектором 15, максимально. Однако, когда оптический путь между оптическим детектором и соответствующим ему обратным отражателем затемнен, например, вследствие прохождения тела, которое должно быть промаркировано вдоль конвейерной ленты 4, как показано на фиг.2 в отношении оптического детектора 12, то количество света, отраженного соответствующим обратным отражателем, в данном случае обратным отражателем 16, и детектируемого детектором 15, падает ниже заранее установленного порогового значения, и генерируется соответствующий сигнал. Чтобы повысить чувстви тельность каждого из оптических детекторов 12 и 13, источник света 14 выбирается таким образом, чтобы он испускал свет в видимом или ближнем инфракрасном диапазоне электромагнитного спектра, хотя детектор 15 выбирается не только из соображений селективной чувствительности к данному конкретному частотному диапазону, но также так, чтобы он реагировал только на свет, имеющий поляризационные характеристики источника 14. Таким образом, детектор 15 является нечувствительным к свету, испускаемомуиными источниками, отличными от источника 14, или к свету, отраженному от поверхностей, иных, чем связанный с ним обратный отражатель, таких, например, как поверхность маркируемого тела, поскольку такие отражения, как правило, обладают другими поляризационными характеристиками. Маркировочное устройство более детально изображено на фиг.3 и состоит из источника (или средства герметизации пучка) 18 лазерного излучения 19, которое направлено так, чтобы оно пересекало траекторию движущегося тела 9. В первом воплощении маркировочное устройство предназначено для обеспечения поверхностной маркировки движущегося тела 9. С этой целью лазерное излучение с достаточной плотностью энергии направляется на тело 9, заставляя области поверхности, на которые оно падает, плавиться и перетекать, в результате чего возникает маркировка. В конкретном воплощении, проиллюстрированном на фиг.3, источник 18 представляет собой квазинепрерывный CO2-лазер с ВЧ-накачкой, испускающий пучок лазерного излучения 19, который имеет длину волны 10,6мкм и, следовательно, невидим невооруженным глазом. Испущенный CO2-лазером пучок 18 лазерного излучения 19 падает на первую отражающую поверхность (или средство наведения пучка) 20, которая направляет пучок 19 через расширитель пучка 21 и устройство сведения пучков (или средство концентрации пучка) 22 на вторую о тражающую поверхность 23. Второй источник лазерного излучения в виде низкоэнергетичного He-Ne (гелий-неон) лазера 24 расположен рядом с CO2-лазером 18 и испускает вспомогательный пучок видимого лазерного излучения 25 с длиной волны 638нм. Вспомогательный пучок 25 падает на устройство сведения пучков 22, где отражается по направлению ко второй отражающей поверхности 23, совпадая с пучком лазерного излучения 19 от CO2-лазера 18. Таким образом, необходимые свойства устройства сведения пучка 22 таковы, что оно должно пропускать электромагнитное излучение с длиной волны 10,6мкм, отражая при этом электромагнитное излучение с длиной волны 638нм. Таким образом пучок гелий-неонового лазера 25 снабжает сведенный пучок от CO2-лазера и He-Ne пучков 19, 25 видимой компонентой, которая облегчает оптическую юстировку. После сведения два совпадающих пучка 19, 25 отражаются от второй отражающей поверхности 23 в направлении третьей отражающей поверхности 26 и от третьей отражающей поверхности 26 отражаются далее по направлению к четвертой отражающей поверхности 27. От четвертой отражающей поверхности 27 сведенный пучок 19, 25 отражается снова по направлению к узлу лазерной головки 28, от которой сведенный пучок 19, 25, наконец, направляется так, чтобы пересечь траекторию движения движущегося тела 9. Чтобы облегчить маркировку на различных высотах от основания тела 9, третья и четвертая отражающие поверхности 26 и 27 монтируются как одно целое вместе с узлом головки 28 так, чтобы была возможность их юстировки в вертикальной плоскости под воздействием шагового двигателя (не показан). Внутри узла головки 28 сведенный пучок от CO2- и He-Ne пучки 19, 25 последовательно падают на два подвижных зеркала (или средство перемещения пятна) 29 и 30. Первое из этих двух зеркал 29 расположено наклонно к сведенным пучкам 19, 25, которые падают на него в результате отражения от четвертой отражающей поверхности 27, и может двигаться таким образом, чтобы вызывать отраженного от него пучка в вертикальной плоскости. Второе из двух зеркал 30 наклонено таким же образом, на этот раз к пучкам 19, 25, которые падают на него в результате отражения от первого зеркала 29, и может двигаться таким образом, чтобы заставить отраженные пучки 19, 25 двигаться в горизонтальной плоскости. Следовательно, специалистам в этой области будет ясно, что пучок 19, 25, выходящий из узла головки 28, может двигаться в любом желаемом направлении в результате одновременного движения первого и второго зеркал 29 и 30. Чтобы обеспечить это движение, два подвижных зеркала 29 и 30 смонтированы соответственно на первом и втором гальванометрах 31 и 32. Хотя признано, что для управления движением двух эти х зеркал 29 и 30 может использоваться любое подходящее средство, например, отдельный серводвигатель или ручной джойстик, принятый подход обеспечивает сочетание скорости отклика с легкостью управления, что представляет собой значительное преимущество над альтернативными средствами управления. Выходя из узла головки 28, сведенные пучки 19, 25 фокусируются при прохождении через набор линз 33, который может включать один или более линзовых элементов. Первый линзовый элемент 34 способен сфокусировать пучки 19, 25 в выбранной точке на поверхности маркируемого тела. Как хорошо известно, максимальная плотность мощности пучков 19, 25 обратно пропорциональна квадрату радиуса пучков 19, 25 в его фокусе, который, в свою очередь, обратно пропорционален радиусу п учков 19, 25, падающих на фокусирующую линзу 34. Таким образом, для пучков 19, 25 электромагнитного излучения с длиной волны l и радиусом R, падающих на линзу с фокусным расстоянием f, плотность мощности в фокусе E в первом приближении определяется формулой: E = PP2/l 2f2 [Вт/м 2 ], где P - мощность лазера. Из этого выражения очевидны значение и роль расширителя пучка 21, так как увеличение радиуса пучка R приводит к увеличению плотности энергии E в фокусе. Кроме того, линзовый элемент 34 обычно представляет собой короткофокусную линзу с фокусным расстоянием в диапазоне от 70 до 80мм, так что типичные плотности мощности в фокусе п учков 19, 25 обычно превышают 300Вт/см 2. При плотностях энергии такого порядка тепловые взаимодействия происходят на поверхности маркируемого тела, в котором падающее излучение 19, 25 поглощается в виде тепла. Этот локальный нагрев приводит к тому, что поверхность тела 9 плавится и перетекает, оставляя остаточную маркировку, сделанную на поверхности. Перемещая фокус пучков 19, 25 с использованием зеркал 29 и 30, можно сделать маркировку заранее определенного вида, в частности, состоящую из одной или более цифр, букв или символов, либо их комбинации, которая, в свою очередь, может представлять собой идентификационную метку, торговую марку, машинно-читаемый код или любой другой желаемый знак. Плотность мощности, необходимая для стимулирования тепловых взаимодействий на поверхности тела, буде т, конечно, зависеть от материала тела и скорости сканирования пучков 19, 25. Такие материалы, как перспекс, могут маркироваться с использованием пучков 19, 25 с плотностью мощности всего 50Вт/см 2, тогда как для маркировки некоторых металлов пучки 19, 25 должны иметь плотность мощности около 1МВт/см 2. Предметы из стекла попадают в промежуток между двумя этими экстремальными случаями и могут маркироваться с использованием пучков 19, 25 с плотностью мощности, превышающей 300Вт/см 2, и скоростью сканирования 3м/с. В интересах безопасности два лазера 18, 24 и соответственно их пучки 19 и 25 заключены внутри камеры безопасности 35, такой, как показанная на фиг.4, причем сведенные пучки 19, 25 выходят из камеры безопасности 35 только после прохождения набора линз 33. Доступ к двум лазерам 18 и 24 и различным оптическим элементам, расположенным на пути соответствующих пучков 19, 25, обеспечивается через дверцу 36, которая соединена с блокировочным устройством 37, делающим невозможной работу CO2-лазера 18 при открытой дверце 36. Следует отметить, что He-Ne лазер 24 необязательно соединять с блокировочным устройством таким же образом, поскольку он работает только с очень малой мощностью и не представляет значительной опасности для опытного оператора. Однофазное сетевое электрическое напряжение 240В подается через блокировочное устройство дверцы 37 к сетевому распределительному устройству 38, которое расположено внизу, и изолировано от камеры безопасности 35 для предотвращения электрических помех работе лазеров 18 и 24. Из распределительного устройства 38 электрическое питание от сети подводится к CO2-лазеру 18 и He-Ne лазеру 24, а также к блоку охлаждения 39, который служит для охлаждения CO2-лазера 18. Кроме того, сетевое электрическое питание подается также на шаговый двигатель 40 и компьютер 41. Три преобразователя переменного тока в постоянный и соответствующие регуляторы напряжения обеспечивают регулируемое постоянное напряжение 9В, 12В и 15В, подаваемое соответственно на He-Ne лазер 24 для обеспечения механизма накачки, на еще одно блокировочное устройство 42, предотвращающее преждевременный запуск CO2-лазера 18, и на узел головки 28 и, в частности, на первый и второй гальванометры 31 и 32 для создания заранее заданного движения первого и второго зеркал 29 и 30. Объединенная последовательность операций маркировочного устройства 1 и детектирующего модуля 2 схематически показана на фиг.5 и начинается с компьютера (или средства управления) 41, вычисляющего или выполняющего просмотр с целью идентификации следующей маркировки, которая должна быть нанесена. Таким образом, если лазерная маркировочная станция используется для маркировки целого ряда предметов, каждый из которых имеет свой серийный номер, компьютер 41 может вычислить следующую маркировку путем добавления необходимого приращения к опорному номеру, составляющему предыдущую маркировку. И наоборот, в начале партииили в процессе более сложной последовательности операций маркировки, компьютер 41 может идентифицировать следующую маркировку из заранее запрограммированного перечня маркировок, содержащегося в соответствующем запоминающем устройстве. Когда следующая маркировка идентифицирована, она может быть выведена на дисплей пульта оператора вместе с иной информацией, такой, как количество маркируемых предметов в конкретной партии, средняя линейная скорость предметов, проходящих мимо детектирующего модуля 2, а также любой другой желательной информацией. Идентифицировав маркировку, которая должна быть нанесена на движущееся тело 9, компьютер 41 вычисляет векторы, необходимые для вычерчивания маркировки в предположении, что тело 9 будет неподвижным в момент маркировки. Эти векторы трансформируются в электрический сигнал, который, если используется для модулирования постоянного напряжения 15В, поступая на первый и второй гальванометры 31 и 32, произведет серию движений первого и второго зеркал 29 и 30, способных перемещать фокус возбужденного лазерного пучка таким образом, чтобы вычертить желаемую маркировку. Поскольку маркируемое тело транспортируется к лазерной маркировочной станции с помощью конвейерной ленты 4, положение движущегося тела 9 относительно неподвижного бокового бортика 6 может быть изменено с помощью регулировочного винта 8. Как правило, регулировочный винт 8 используется для сужения эффективной ширины конвейерной ленты 4 рядом с первым отверстием 10 в защитном кожухе 3. Таким образом эффективная ширина конвейерной ленты 4 становится не намного шире, чем само движущееся тело 9, тем самым обеспечивая некоторую степень контроля за поперечным расстоянием между маркируемым телом и разумными компонентами детектирующего модуля 2 и маркировочной установки 1. В течение всего этого времени детектирующий модуль используется для детектирования приближения маркируемого тела. Как только тело 9 достигает оптического детектора 12, его ведущая кромка затемняет оптический путь между источником света 14, обратным отражателем 16 и детектором 15, приводя к тому, что количество детектируемого света падает ниже установленного порогового значения. В результате генерируется соответствующий сигнал, который посылается на компьютер 41, запуская его часовой механизм. Этот часовой механизм не останавливается до момента времени t1, когда ведущая кромка движущегося тела 9 детектируется таким же образом вторым оптическим детектором 13. Поскольку два оптических детектора 12 и 13 расположены на известном расстоянии d1 друг от друга, скорость V маркируемого тела можно легко вычислить путем деления известного расстояния d1 на время t1, измеренное часовым механизмом. Таким образом V = d1/t 1. Чтобы создать компактную установку, способную маркировать тела, движущиеся с относительно большой линейной скоростью, расстояние d1 между двумя оптическими детекторами 12 и 13 предпочтительно делать как можно меньше. В предельном случае оптический детектор 12 устанавливают впритык к оптическому детектору 13, что позволяет снизить d1 до 1мм. Даже при таких маленьких расстояниях генератор, составляющий основу часового механизма, способен провести свыше 5 циклов в течение типичного временного интервала t1, так что уменьшение d1 не оказывает заметного влияния на точность, с которой может быть измерена скорость V. Пройдя мимо второго оптического детектора 13, маркируемое тело продолжает двигаться на конвейерной ленте 4 до тех пор, пока в момент времени t2 не окажется рядом с маркировочной установкой 1. Поскольку второй оптический детектор 13 и маркировочная установка 1 находятся также на известном расстоянии d2 друг от друга, время t2 может быть вычислено путем деления расстояния d2 на скорость V движущегося тела 9. Таким образом, t2 = d 2/v, или t2 = d2/d1 ´ t1 . С другой стороны, чтобы обеспечить компактность установки, расстояния d1 может быть уменьшено до минимума ограниченного мощностью компьютера 41, но, как правило, оно составляет величину порядка 5мм. Используя приведенное выше уравнение, компьютер 41 вычисляет расчетное время прибытия t2 маркируемого тела к маркировочной установке 1. Этот временной интервал, однако представляет собой время, когда ведущая кромка тела 9 находится рядом с маркировочной установкой 1, и, таким образом, если желаемая маркировка должна быть нанесена не на ведущую кромку, к временному интервалу t2 добавляется дополнительная временная задержка dt, чтобы получить время t3, когда маркируемая часть тела 9 будет находиться рядом с маркировочной установкой 1. В момент времени t3 после того, как сигнал генерирован вторым оптическим детектором 13, CO2-лазер 18 начинает работать, и сведенный пучок CO2 и He-Ne пучки 19 и 25 фокусируются вычисленную точк у на поверхности тела 9. В этот же самый момент генерируется электрический сигнал для модуляции постоянного напряжения 15В, приложенного к первому и второму гальванометрам 31 и 32; этот сигнал не только воспроизводит векторы, необходимые для вычерчивания желательной маркировки, но также включает в себя наложенную компоненту, компенсирующую движение тела 9 со скоростью V. Модулированное постоянное напряжение 15В производит серию движений первого и второго зеркал 29 и 30, которые направляют фокус сведенного пучка CO2 и He-Ne пучков 19, 25 так, чтобы он вычерчивал желательную маркировку, в то же самое время перемещая вычерчиваемую маркировку со скоростью V, что позволяет осуществлять динамическое сканирование в масштабе реального времени. После того, как тело 9 промаркировано, оно продолжает перемещаться с помощью конвейерной ленты 4, выходит из защитного кожуха 3 и уходит из лазерной маркировочной станции через второе отверстие 11. Промаркированное тело 9 может после этого быть перемещено к следующей обрабатывающей станции, если это требуется, в то время как компьютер 41 вычисляет следующую маркировку, которая должна быть нанесена, и вся последовательность операций начинается снова. Специалистам будет ясно, что когда тело 9 движется мимо маркировочной установки 1, расстояние между набором линз 33 и той частью поверхности тела 9, которая должна маркироваться, непрерывно изменяется. Даже если тело 9 было бы неподвижным при маркировке, если желательная маркировка была бы достаточно большого размера, любая кривизна тела 9 также приводила бы к различным расстояниям между набором линз 33 и различными точками на поверхности. Сверх этого, следующие друг за другом маркируемые тела могут располагаться на конвейерной ленте 4 на различных расстояниях от неподвижного бокового бортика 6, несмотря на сужение эффективной ширины конвейерной ленты 4 перед лазерной маркировочной станцией. Если, как это было описано, первый линзовый элемент 34 имеет фиксированное фокусное расстояние, каждый из указанных выше факторов будет способствовать тому, что части наносимой на тело маркировки будут ближе или дальше от фокуса. Однако, тщательно выбирая фокусное расстояние линзового элемента 34, можно свести эту проблему к минимуму. Как уже было ранее сказано, фокусное расстояние первого линзового элемента 34 обычно составляет от 70 до 80мм, и этот элемент способен фокусировать сведенный пучок CO2 и He-Ne пучки 19, 25 так, чтобы получить в фокусе плотность мощности, как правило, свыше 300Вт/см 2. Однако, при всем этом для линзового элемента с фокусным расстоянием в этих пределах плотность мощности на малом расстоянии d x от фокуса все еще недостаточна, чтобы привести к тепловым взаимодействиям внутри маркируемого тела. В предпочтительном варианте воплощения линзовый элемент 34 имеет фокусное расстояние 75мм, что позволяет получить для стекла d x, больше 5мм, хотя величина d x, конечно, зависит от материала, из которого сделано тело 9. Однако, с использованием такой линзы описанная установка может эффективно маркировать движущиеся тела, поверхности которых лежат в узком диапазоне вокруг оптимального расстояния от набора линз 33. И наоборот, или в дополнение к этому, второй линзовый элемент 42 может быть помещен последовательно с первым линзовым элементом 34, чтобы компенсировать один или более описанных выше дефокусир ующи х эффектов. Такой линзовый элемент 42 может обладать фокусным расстоянием, которое меняется по его ширине и может, например, представлять собой плоский объектив, компенсирующий любую кривизну поверхности маркируемого тела. В еще одной из установок набор линз 33 может включать в себя третий линзовый элемент 43 в виде линзы с переменным фокусным расстоянием, фокусное расстояние которой может меняться, когда маркируемое тело проходит мимо маркировочной установки 1, тем самым удерживая фокус сведенного пучка CO2 и He-Ne пучков 19, 25 в нужной точке на поверхности тела 9, несмотря на описанные выше дефокусирующие эффекты. Еще в одной из установок вместо второго линзового элемента 42 или третьего линзового элемента 43 может быть помещен четвертый линзовый элемент (не показан) в виде рассеивающей линзы. Четвертый линзовый элемент с фокусным расстоянием предпочтительно располагается на расстоянии f2 перед фокусом, который был бы создан первым линзовым элементом 34.Таким образом четвертый линзовый элемент дает узкий параллельный пучок излучения с высокой плотностью энергии, который может быть направлен на движущееся тело 9 для получения освещенного пятна на его поверхности. Если узкий пучок имеет достаточную плотность мощности, он может быть использован для обеспечения маркировки поверхности движущегося тела 9, в то же самое время не имея тенденции к любому из описанных выше дефокусирующих эффектов. Во втором воплощении, изображенном на фиг.6, маркировочная установка 1 также предназначена для обеспечения маркировки движущегося материального тела 9, за исключением того, что вместо наложения составляющей, которая компенсирует это движение, на уже и без того сложное движение первого и второго зеркал 29 и 30, движение тела 9 полностью компенсируется пятой отражающей поверхностью 44. Пятая отражающая поверхность 44 закреплена на оси 45 так, что может вращаться вокруг нее, и расположена так, чтобы направлять на движущееся тело 9 сведенный пучок CO2 и He-Ne пучки 19, 25, которые падают на нее в результате отражения от второго зеркала 30. Когда маркируемое тело проходит мимо маркировочной установки 1, пятая отражающая поверхность 44 поворачивается вокруг оси 45 таким образом, чтобы удержать сведенный пучок CO2 и He-Ne пучки 19, 25 направленные на движущееся тело 9. Пятая отражающая поверхность 44 предпочтительно состоит из зеркала третьего гальванометра (не показано). Таким образом может быть обеспечено движение пятой отражающей поверхности 44 с той же самой скоростью отклика и легкостью управления, что и в случае первого и второго зеркал 29 и 30. При таких обстоятельствах, когда CO2-лазер 18 введен в действие и постоянное напряжение 15В, приложенное к первому и второе гальванометрам 31 и 32, модулируется для создания заранее определенного движения первого и второго зеркал 29 и 30, к третьему гальванометру 46 может быть приложено отдельное постоянное напряжение 15В, которое модулируется в соответствии с предварительно измеренной скоростной характеристикой движущегося тела 9. Как и раньше, суммарный эффект движения зеркал трех гальванометров 31, 32 и 46 должен позволять производить динамическое сканирование движущегося тела 9 в масштабе реального времени сведенным пучком CO2 и He-Ne пучками 19, 25. На фиг.6 показана пятая отражающая поверхность 44, расположенная между вторым зеркалом 30 и набором линз 33, хотя специалистам будет ясно, что пятая отражающая поверхность 44 может с тем же успехом располагаться в других точках вдоль оптического пути сведенного пучка CO2 и He-Ne пучков 19, 25, например, непосредственно после набора линза 33. В третьем воплощении, которое аналогично второму в том, что компенсация движения тела 9 осуществляется отдельно от генерации самой маркировки, пятая отражающая поверхность 44 заменена многогранным зеркалом 47, как показано на фиг.7. Как и пятая отражающая поверхность 44, многогранное зеркало 47 укреплено на оси 48 так, что может вращаться вокруг нее, и расположено так, что направляет на движущееся тело сведенный пучок CO2 и He-Ne пучки 19, 25, которые падают на него в результате отражения от второго зеркала 30. Когда маркируемое тело проходит мимо маркировочной установки 1, многогранное зеркало 47 поворачивается вокруг оси 48 таким образом, чтобы удерживать сведенный пучок CO2 и He-Ne пучки 19, 25 направленным на движущееся тело 9. Преимуществом этого третьего воплощения в отличие от второго воплощения, описанного выше, является то, что после того, как движущееся тело 9 промаркировано, многогранное зеркало 47, в отличие от пятой отражающей поверхности 44 из второго воплощения, не должно быстро вращаться вокруг оси 47 в каком-либо направлении, чтобы соответствующим образом настроиться на следующее маркируемое тело. Вместо этого многогранное зеркало 47 может продолжать вращаться в том же самом направлении и с той же скоростью, чтобы удержать сведенный пучок CO2 и He-Ne пучки 19, 25 направленными на следующее маркируемое тело посредством отражения от другой поверхности многогранного зеркала 47. Форма многогранного зеркала 47 налагает, однако, определенные требования на его собственную скорость вращения, которая должна быть такой, чтобы гарантировать, что оно не повернется на угол, большим чем угол, стягиваемый рабочей гранью, в течение времени, необходимого для маркировки движущегося тела 9. Вращением многогранного зеркала 47 можно управлять с помощью компьютера 41, если скорость движущегося тела 9 уже измерена и количество векторов, необходимых для вычерчивания желательной маркировки, известно, поскольку последнеепозволяет предсказать необходимое время маркировки, тогда как первая позволяет вычислить расстояние, на которое тело 9 будет перемещено в процессе маркировки. На фиг.7 многогранное зеркало 47 показано расположенным между вторым зеркалом 30 и набором линз 33, хотя специалистам будет ясно, что многогранное зеркало 47 с тем же успехом может располагаться в других точках вдоль оптического пути сведенного пучка CO2 и He-Ne пучков 19, 25, например, непосредственно после набора линз 33. В четвертом примере воплощений маркировочной установки 1, показанном на фиг.8, движение тела 9 компенсируется поперечным смещением всего узла головки 28 и набора линз 33. После измерения скорости маркируемого тела узел головки 28 и набор линз 33 движутся в направлении, параллельном движущемуся телу 9, под воздействием двигателя (не показан). Если перемещать узел головки 28 и набор линз 33 с той же самой скоростью, что и у движущегося тела 9, относительную скорость между ними можно снизить до нуля, пока желаемая маркировка не будет нанесена. Когда движущееся тело промаркировано, узел головки 28 и набор линз 33 быстро возвращаются в исходные положений снова под действием двигателя (не показан), так, чтобы быть готовыми промаркировать следующее тело. При обеспечении распространения сведенного пучка CO2 и He-Ne пучков 19, 25, которые отражаются от первого зеркала 29, в направлении, параллельном конвейерной ленте 4, до отражения в направлении движущегося тела 9 вторым зеркалом 30, специалистам будет ясно, что для достижения желаемого эффекта только второе зеркало 30 и набор линз 33 должны приводиться в движение двигателем (не показан). Действительно, если набор линз 33 был бы расположен на оптическом пути сведенного пучка CO2 и He-Ne пучков 19, 25 между четвертой отражающей поверхностью 26 и первым зеркалом 29, тогда только второе зеркало 30 было бы необходимо приводить в движение двигателем. В пятом воплощении один или более акустооптических или электрооптических кристаллов (не показаны) могут быть расположены на пути пучков 19, 25, чтобы компенсировать движение тела 9. Кристаллы этих типов обладают свойством отклонять падающий пучок на различные углы в зависимости от значения приложенного к ним напряжения. Поэтому, прилагая меняющееся соответствующим образом напряжение к кристаллам (не показаны), можно продолжать направлять сведенный пучок CO2 и He-Ne пучки 19, 25 на движущееся тело 9, когда оно проходит мимо маркировочной установки 1. Описание фиг.5: 49 - запуск, 50 - вычисление или отыскание следующей маркировки, 51 - выдача данных на дисплей, 52 - вычисление векторов для стационарной маркировки, 53 - детектирование изделия на входе, 54 - вычисление скорости изделия, 55 - вычисление оценочного времени прибытия изделия, 56 временная задержка (для ожидания прибытия изделия), 57 - наложение информации о скорости на векторы знаков, 58 - маркировка изделия, 59 - сигнал скорости, 60 - динамическое сканирование в масштабе реального времени. Специалистам будет также ясно, что установка, описанная в связи с любым из предыдущих воплощений, может быть также использована для осуществления подповерхностной маркировки движущегося материального тела без существенных изменений. В прошлом, чтобы создать несмываемую маркировку, производители почти исключительно прибегали к поверхностной маркировке. Однако, одна из основных трудностей с маркировкой этого типа состоит в том, что она может быть либо разрушена при удалении части поверхности, на которую нанесена маркировка, либо имитирована путем нанесения идентичной маркировки на подделку. С использованием установки, аналогичной уже описанной, движущееся материальное тело может быть снабжено подповерхностной маркировкой путем направления на поверхности тела сфокусированного пучка лазерного излучения с высокой плотностью энергии, для которого данный материал прозрачен. Пучок фокусируется в точке, расположенной на некотором расстоянии от поверхности внутри тела, так, чтобы вызвать локальную ионизацию материала и создать маркировку в виде области повышенной непрозрачности к электромагнитному излучению, причем, что существенно, без заметных изменений на поверхности. Во избежание неоднозначности трактовки следует отметить, что термин "прозрачный", так, как он используется выше по отношению к маркируемому материалу, относится к материалу, в котором пучок с высокой плотностью энергии может проникнуть по меньшей мере до глубины желаемой маркировки, и, как таковой, включает в себя полупрозрачные материалы и такие материалы, как цветные или задымленные стекла, в которых характеристики пропускания электромагнитного излучения на длинах волн видимого диапазона хотя и снижены, но пропускание все же не исключено полностью. Термин "прозрачный" включает также в себя материалы, которые непрозрачны для электромагнитного излучения с длинами волн видимого диапазона, но, по меньшей мере, способны пропускать электромагнитное излучение с длинами волн в том же самом диапазоне электромагнитного спектра, что и длина волны пучка с высокой плотностью энергии. Возможные типы взаимодействия между лазерным излучением и материальным телом могут быть разделены на три категории в зависимости от плотности мощности лазерного излучения, о котором идет речь. В порядке увеличения плотности мощности эти категории таковы: 1) фото химические взаимодействия, включая фотоиндукцию и фотоактивацию; 2) тепловые взаимодействия, в которых падающее излучение поглощается в виде тепла, и 3) ионизирующие взаимодействия, которые включают в себя нетепловое фоторасщепление облученного материала. Разница между порогами этих трех типов взаимодействия четко демонстрируется путем сравнения типичной плотности мощности 10-3Вт/см 2, необходимой для возникновения фотохимического взаимодействия, с плотностью мощности 1012Вт/см 2, типичной для ионизирующи х взаимодействий, таких, как фотоабляция и фоторазрушение. Для того, чтобы произошла локальная ионизация, пучок с высокой плотностью энергии должен обладать энергией, достаточной для расщепления молекулярных связей и создания плазмы в фокальной точке. Когда пучок убирают, плазма охлаждается, формируя локальную область повреждения или разрушения, которая рассеивает падающее на нее электромагнитное излучение, в результате чего эта зона проявляет себя как область повышенной непрозрачности. В настоящее время единственными предлагающимися на рынке лазерами, способными вызвать ионизационные взаимодействия, являются импульсные лазеры, имеющие пиковую энергию, которая при фокусировании достаточна для создания плазмы внутри материала, о котором идет речь. Поэтому, чтобы осуществить подповерхностную маркировку движущегося тела, источник 20 лазерного излучения 21 предпочтительно заменить лазером, имеющим плотность мощности в фокусе не менее 107Вт/см 2 и длительность импульса не более 10-6 секунд. Таким образом, плотность энергии в каждом импульсе составляет не менее 10Дж/см 2 и достаточна для того, чтобы вызвать локальную ионизацию материала в фокусе пучка. Если подповерхностная маркировка должна быть видимой невооруженным глазом, маркируемое тело должно быть прозрачным для электромагнитного излучение с длинами волн видимого диапазона. Например, такое тело может быть изготовлено из стекла или пластика. Однако, такие ограничения не являются обязательными для маркируемых тел, они могут также изготавливаться из материала, непрозрачного для электромагнитного излучения с длинами волн видимого диапазона. При этом получающаяся подповерхностная маркировка скрыта для невооруженного глаза, но может быть "видна" с помощью оптических инструментов, работающих на соотве тствующей длине волны в пределах электромагнитного спектра, совпадающей с длиной волны пучка с высокой плотностью энергии. Хотя такая маркировка не способна выполнять многие из функций ее видимых аналогов, она представляет собой действительно несмываемую скрытую маркировку. В предположении, что вероятная подповерхностная маркировка предназначена для того, чтобы быть видимой невооруженным глазом, и что поэтому движущееся тело 9 изготовлено из такого материала, как стекло или пластик, которые прозрачны для электромагнитного излучения в видимом диапазоне спектра, источник 20, в дополнение к ограничениям, указанным выше, должен также выбираться так, чтобы материал, из которого изготовлено тело 9, был прозрачен для лазерного излучения 21, которое этот источник генерирует. При этом источник 20 предпочтительно представляет собой Nd-YAG лазер (лазер на иттриево-алюминиевом гранате с неодимом), генерирующий на длине волны 1,06мкм. Остальная часть описанного устройства не нуждается в существенных изменениях, чтобы осуществлять подповерхностную маркировку, хотя выбор источника 16 будет, конечно, влиять на выбор оптических элементов, используемых для направления и фокусирования получающегося лазерного излучения 21, поскольку не все эти элементы будут работать с одинаковой эффективностью при различных длинах волн в пределах электромагнитного спектра. Считается, однако, что соответствующий выбор элементов нетруден для специалиста. При использовании для осуществления подповерхностной маркировки движущегося тела набор линз 33 может включать в себя третий линзовый элемент 43 в виде линзы с переменным фокусным расстоянием, так что маркировки могут выполняться на различных глубинах внутри движущегося тела 9, что создает возможность получения трехмерной маркировки. Специалистам будет ясно, что, хотя описанное устройство включает средства для определения скорости движущегося тела 9, это необязательно, поскольку в установку может быть интегрирована механическая связь, которая придает сведенному пучку CO 2 и He-Ne пучкам 19, 25 составляющую движения, равную скорости движущегося тела 9, даже без определения величины этой скорости.
ДивитисяДодаткова інформація
Автори англійськоюClement Robert Mark
Автори російськоюКлемент Роберт Марк
МПК / Мітки
МПК: B23K 26/04, B23K 26/00
Мітки: пристрій, спосіб, здійснення, рухається, маркування, тіла, матеріального, яке
Код посилання
<a href="https://ua.patents.su/13-26144-sposib-markuvannya-materialnogo-tila-yake-rukhaehtsya-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб маркування матеріального тіла, яке рухається, та пристрій для його здійснення</a>
Спосіб обертання електропровідного тіла і пристрій для його здійснення
Номер патенту: 23546
Опубліковано: 02.06.1998
Автор: Воєвудський Вадим Іванович
МПК: B81B 5/00, H02P 25/16
Мітки: обертання, тіла, спосіб, здійснення, пристрій, електропровідного
Формула / Реферат:
1. Способ вращения электропроводного тела, в котором на две электрические обмотки извне тела подают однофазное напряжение, токами от него создают два переменных электромагнитных поля, в каждом из них формируют пульсирующее магнитное поле, силовые линии которых при этом направляют поперек оси. вращения тела, замыкая магнитный поток одного из полей в поперечной к оси вращения тела плоскости, наводят этим полем ток в электропроводном теле, а при...
Спосіб масажу рефлексогенних зон та пристрій для його здійснення

Номер патенту: 19143
Опубліковано: 25.12.1997
Автори: Петрик Лідія Іванівна, Бакай Едуард Аполінарійович, Камчатний Юрій Григорович, Титор Павло Павлович
МПК: A61H 11/00, A61H 39/00, A61H 7/00
Мітки: пристрій, здійснення, рефлексогенних, зон, спосіб, масажу
Формула / Реферат:
Изобретение относится к медицинской технике, а именно к физиотерапевтическим способам и устройствам и может быть использовано для проведения лечебного и оздоровительного массажа рефлексогенных зон поверхности тела человека.,Целью изобретения является расширение функциональных возможностей и повышение эффективности лечебного воздействия.На фиг. 1 представлен общий вид устройства для массажа рефлексогенных зон; на фиг. 2 - вид...
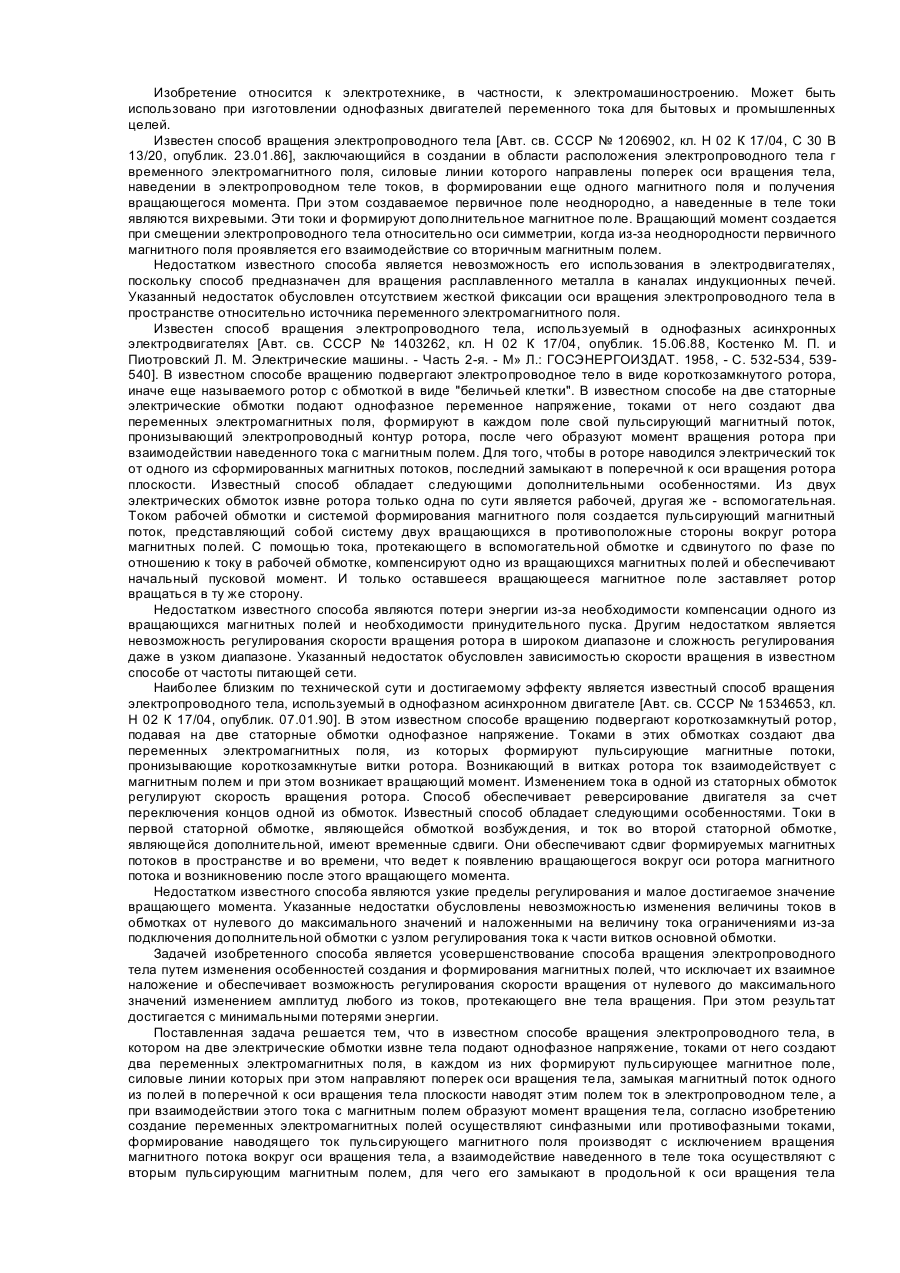
Спосіб дослідження рельєфних та фазових об’єктів в лазерному скануючому мікроскопі та пристрій для його здійснення
Номер патенту: 19905
Опубліковано: 25.12.1997
Автори: Обозненко Юрій Леонідович, Ільченко Леонід Миколайович, Смирнов Євген Миколайович, Погорєлова Галина Федорівна
МПК: G02B 21/00
Мітки: мікроскопі, спосіб, скануючому, пристрій, лазерному, рельєфних, фазових, дослідження, об'єктів, здійснення
Формула / Реферат:
Формула изобретенияСпособ исследования рельефных и фазовых объектов в лазерном сканирующем микроскопе, заключающийся в том, что изображение объекта формируют путем сравнения фаз световых пучков, отраженных от поверхности объекта в двух точках, разнесенных на диаметр светового пятна, преобразования этой разности фаз в электрический сигнал с фазовой демодуляцией и модуляции электрическим сигналом соответствующей точки изображения,...
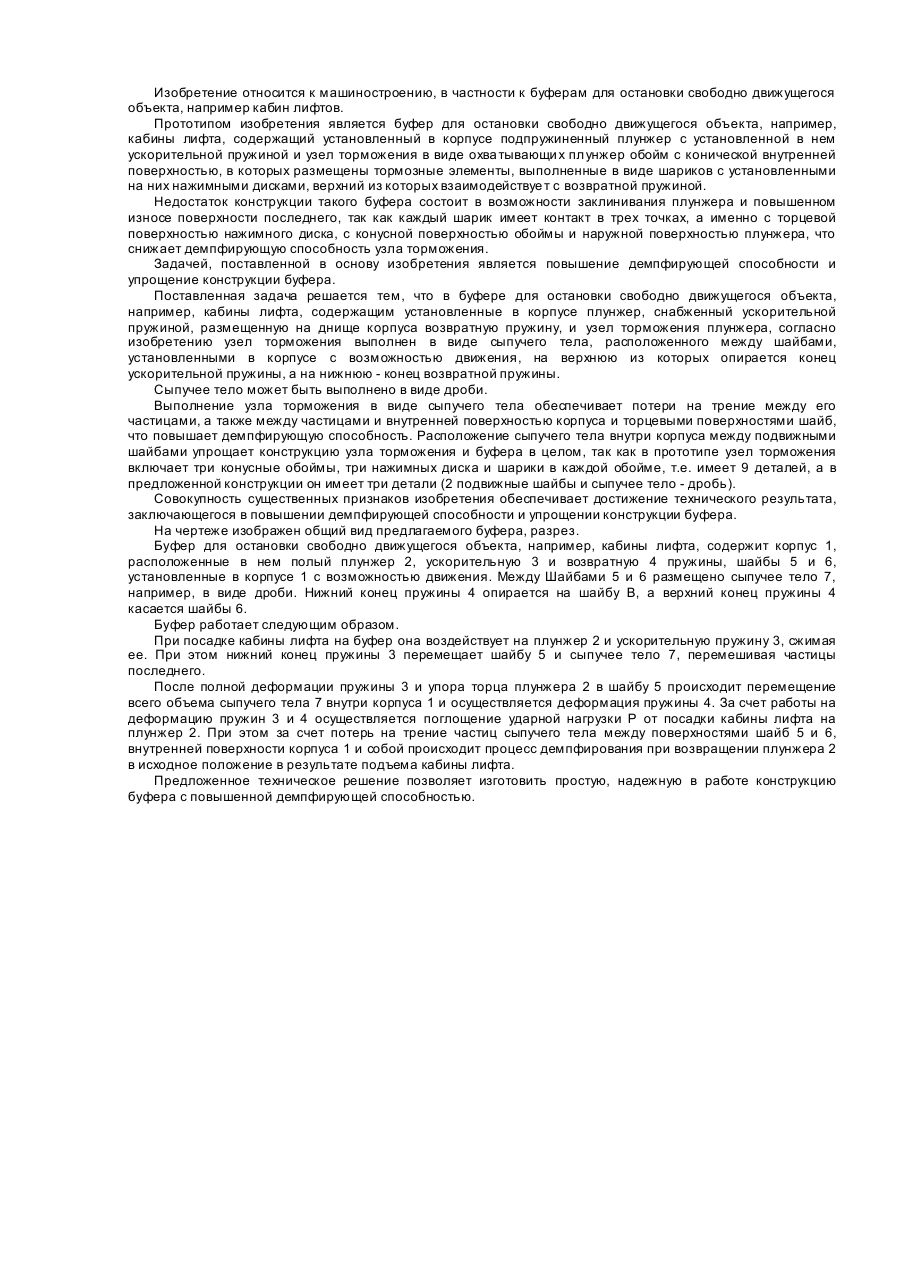
Буфер для зупинення об’єкта, що вільно рухається
Номер патенту: 13897
Опубліковано: 25.04.1997
Автор: Рахманов Микола Миколайович
Мітки: вільної, буфер, об'єкта, рухається, зупинення
Формула / Реферат:
1. Буфер для остановки свободно движущегося объекта, например, кабины лифты, содержащий установленный в корпусе плунжер, снабженный ускорительной пружиной, размещенную на днище корпуса возвратную пружину и узел торможения плунжера, отличающийся тем, что упомянутый узел выполнен в виде сыпучего тела, расположенного между шайбами, установленными в корпусе с возможностью движения, на верхнюю из которых опирается конец ускорительной пружины, а...
Спосіб контактного зварювання пластинчастого тіла усередині трубчастого металевого стержня і установка для здійснення способу
Номер патенту: 5691
Опубліковано: 28.12.1994
Автори: Серджо Чеккеллеро, Даніелє Сальваторе
МПК: B23K 11/04
Мітки: способу, усередині, тіла, зварювання, металевого, пластинчастого, трубчастого, контактного, стержня, установка, здійснення, спосіб
Формула / Реферат:
1. Способ контактной сварки пластического тела внутри трубчатого металлического стержня многоугольного сечения, включающий сборку свариваемых деталей и нагрев электросопротивлением, отличающийся тем, что стержень и пластинчатое тело размещают на соответствующих опорах, пластинчатое тело выводят из опоры, соединяют с одним из электродов сварочной установки и вводят в стержень, при этом плоскость пластинчатого тела располагают на уровне оси...
Попередній патент: Самохідна збиральна машина
Наступний патент: Спосіб переробки алюмінатних галійвмісних розчинів
Випадковий патент: Спосіб корекції метаболічних порушень у хворих на артеріальну гіпертензію та ожиріння з урахуванням гаплотипу