Пристрій для високочутливої магнітної детекції аналітів (варіанти)
Номер патенту: 41476
Опубліковано: 17.09.2001
Автори: Кох Ханс, Матц Хартмут, Друнг Дітмар, Ваітшіс Вернер, Земмлер Вольфхард, Трамс Лутц, Кьотітц Роман


Формула / Реферат
1. Пристрій для високочутливої магнітної детекції аналітів, що містить пристосування намагнічування для створення магнітного поля в місці проби і детекторне пристосування для вимірювання магнітних властивостей проби, який відрізняється тим, що пристосування намагнічування (11'; 11") розміщене в такому положенні щодо детекторного пристосування (71, 8, 9, 10; 16; 20), що магнітне поле, створюване за допомогою пристосування намагнічування (11'; 11") у місці намагнічування, ослаблене, щонайменше, на чинник 10 у місці, де знаходиться проба під час вимірювання.
2. Пристрій згідно з п. 1, який відрізняється тим, що магнітне поле ослаблене на чинник 1000 або більше.
3. Пристрій згідно з п.п. 1 або 2, який відрізняється тим, що він містить пристосування (17; 17') для приведення проби (12) у рух під час вимірювальної фази детекторного пристосування (71, 8, 9,10; 16; 20).
4. 1. Пристрій для високочутливої магнітної детекції аналітів, що містить пристосування намагнічування для створення магнітного поля в місці проби і детекторне пристосування для вимірювання магнітних властивостей проби, який відрізняється тим, що містить вимикач, який служить для відключення магнітного поля пристосування намагнічування (11) у місці проби (12) у визначений період, зокрема під час вимірювальної фази детекторного пристосування (71, 8, 9, 10; 16), і пристосування (17; 17') для приведення проби (12) у рух під час вимірювальної фази детекторного пристосування (71, 8, 9, 10; 16,20).
51. Пристрій для високочутливої магнітної детекції аналітів, що містить пристосування намагнічування для створення магнітного поля в місці проби і детекторне пристосування для вимірювання магнітних властивостей проби, який відрізняється тим, що містить вимикач, який служить для відключення магнітного поля пристосування намагнічування (11) у місці проби (12) у визначений період, зокрема під час вимірювальної фази детекторного пристосування (71, 8, 9, 10; 16), і який включає перший вузол для включення й відключення магнітного поля, створюваного в пристосуванні намагнічування (11), і другий вузол для включення й відключення детекторного пристосування (71, 8, 9, 10; 16).
6. Пристрій згідно з будь-яким із попередніх пунктів, який відрізняється тим, що детекторне пристосування містить обладнання для вимірювання намагніченості проби.
7. Пристрій згідно з будь-яким із попередніх пунктів, який відрізняється тим, що детекторне пристосування містить обладнання для вимірювання залишкової індукції зв'язування аналіта у пробі.
8. Пристрій згідно з будь-яким із п.п. 4-6, який відрізняється тим, що детекторне пристосування містить обладнання для магніторелаксометричної детекції.
9. Пристрій згідно з будь-яким із попередніх пунктів, який відрізняється тим, що детекторне пристосування містить, щонайменше, один SQUID (71) як частину датчика магнітного поля.
10. Пристрій згідно з будь-яким із попередніх пунктів, який відрізняється тим, що детекторне пристосування містить, щонайменше, одну котушку індуктивності (20), яка являє собою частину датчика магнітного поля.
11. Пристрій згідно з будь-яким із п.п. 5-10, який відрізняється тим, що перший і другий вузли виконані з можливістю включення незалежно один від одного.
12. Пристрій згідно з будь-яким із п.п. 5-10, який відрізняється тим, що перший вузол виконаний з можливістю включення у визначеному незмінному тимчасовому відношенні до другого вузла.
13. Пристрій згідно з будь-яким із п.п. 5-12, який відрізняється тим, що перший вузол виконаний з можливістю створення визначеної амплітуди й полярності магнітного поля, створюваного у пристосуванні намагнічування (11:21).
14. Пристрій згідно з п. 13, який відрізняється тим, що перший вузол виконаний з можливістю забезпечення тимчасового режиму амплітуди, що наперед визначається, і тимчасового режиму полярності магнітного поля, що наперед визначається, створюваного у пристосуванні намагнічування (11; 21).
15. Пристрій згідно з будь-яким із попередніх пунктів, який відрізняється тим, що містить пристосування для електронного пригнічення паразитних сигналів.
16. Пристрій згідно з п. 15, який відрізняється тим, що пристосування для електронного пригнічення паразитних сигналів включає вузол для адаптивної фільтрації.
17. Пристрій згідно з будь-яким із попередніх пунктів, який відрізняється тим, що містить пристосування (9) для вимірювання вектора поля перешкод і зв'язане з ним пристосування для відповідної компенсації сигналу, що вимірюється за допомогою детекторного пристосування (71, 8, 9, 10; 16; 21) і/або магнітного поля, створюваного пристосуванням намагнічування(11).
18. Пристрій згідно з будь-яким із попередніх пунктів, зокрема згідно з п. 7 або 8, який відрізняється тим, що він настроєний для здійснення вимірювань in vivo.
Текст
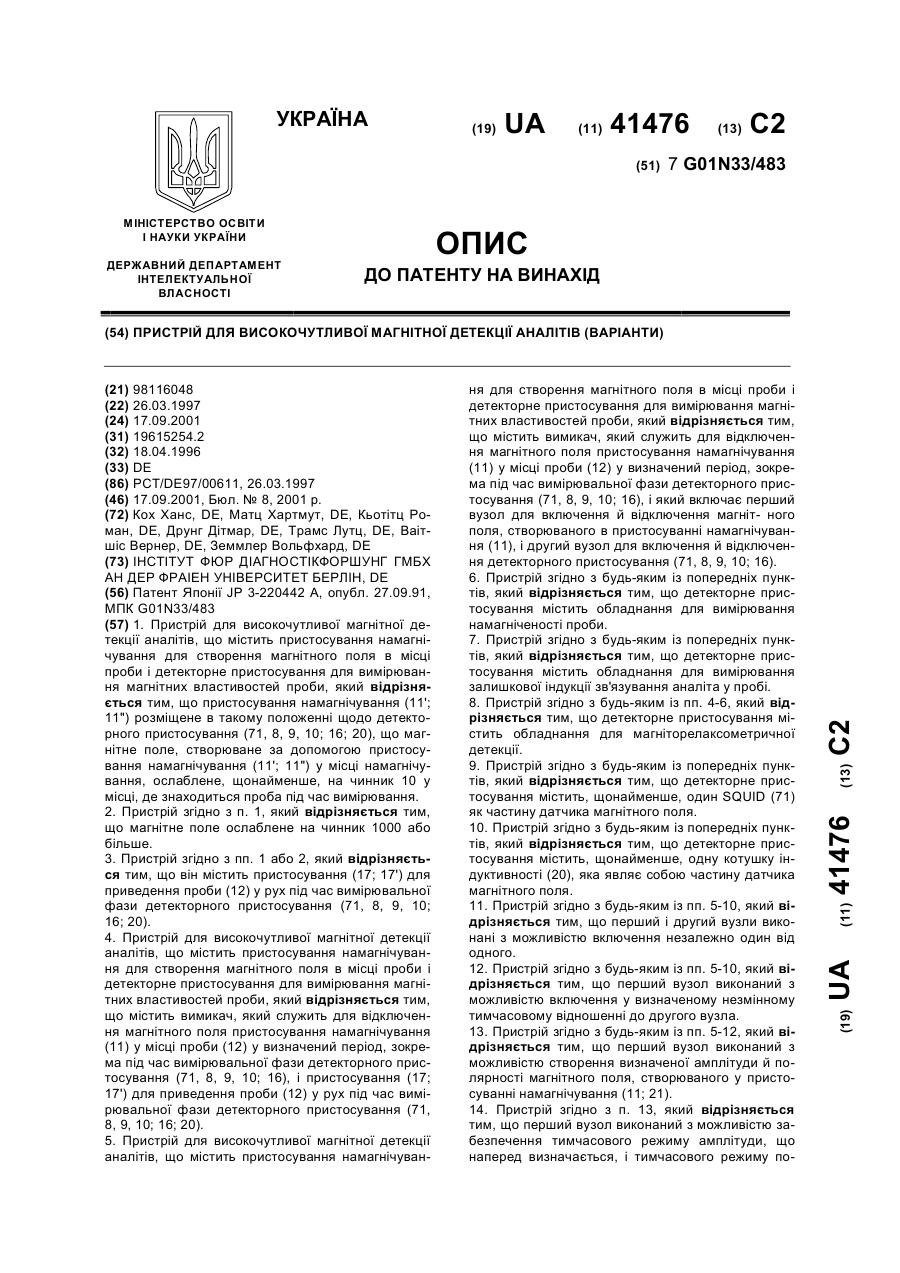
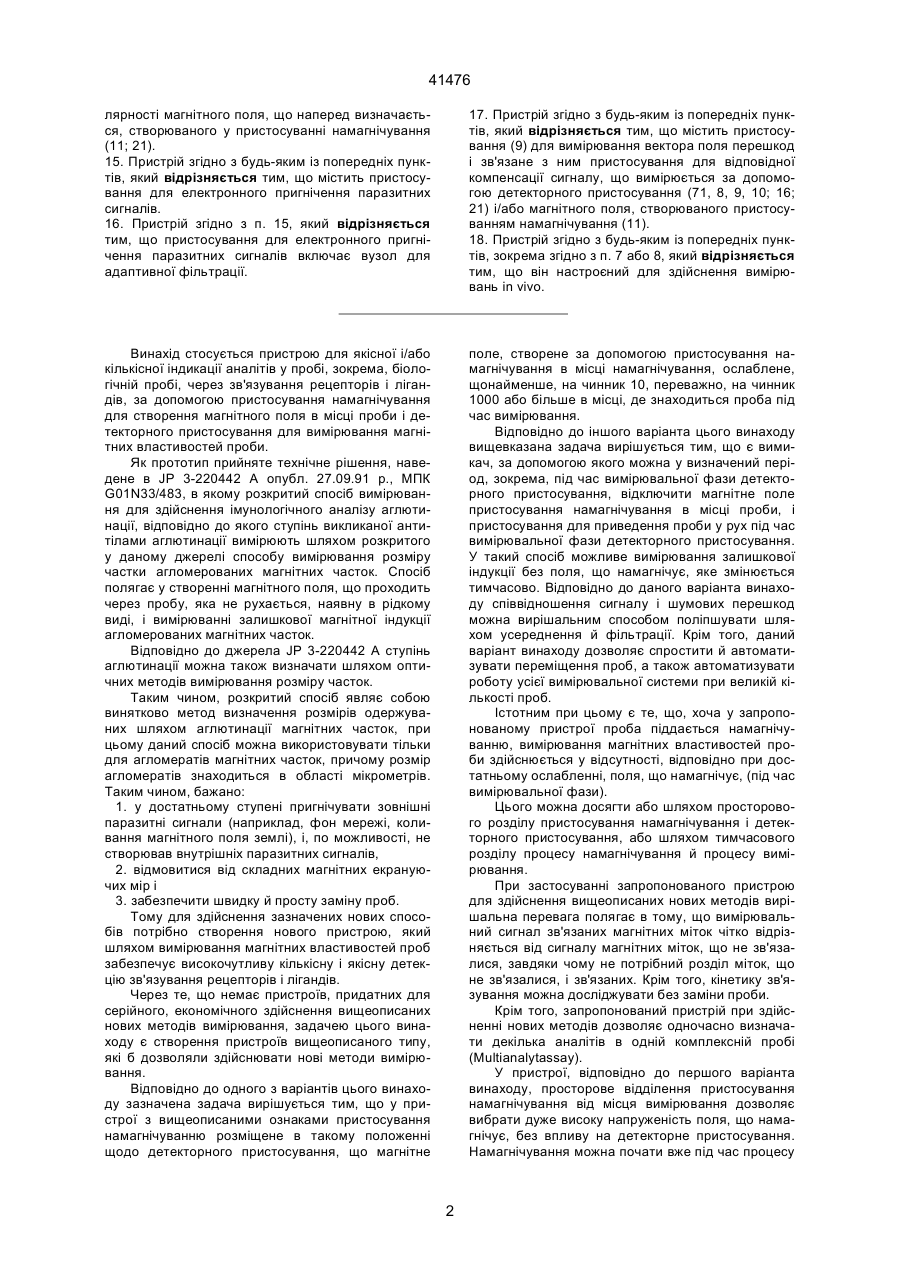
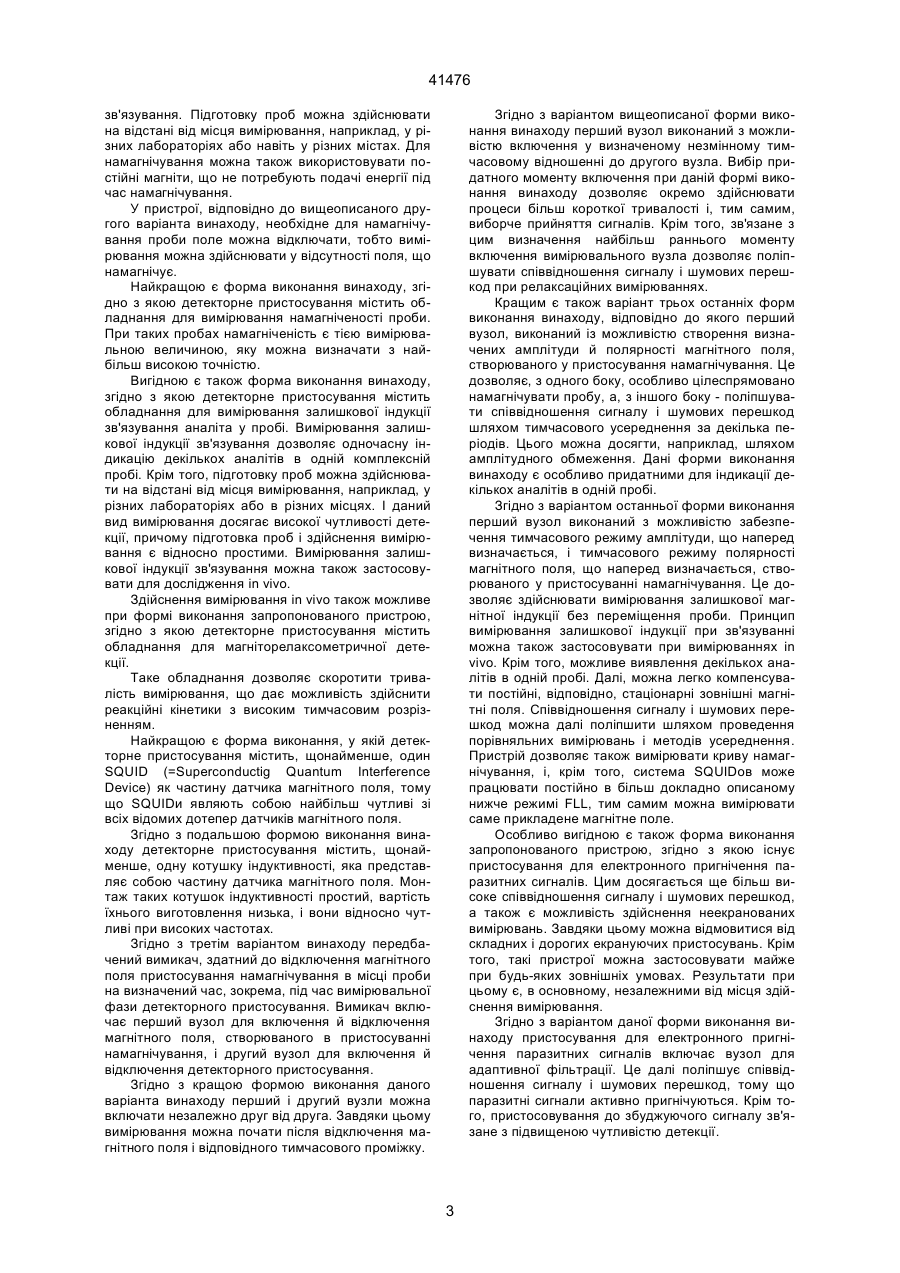
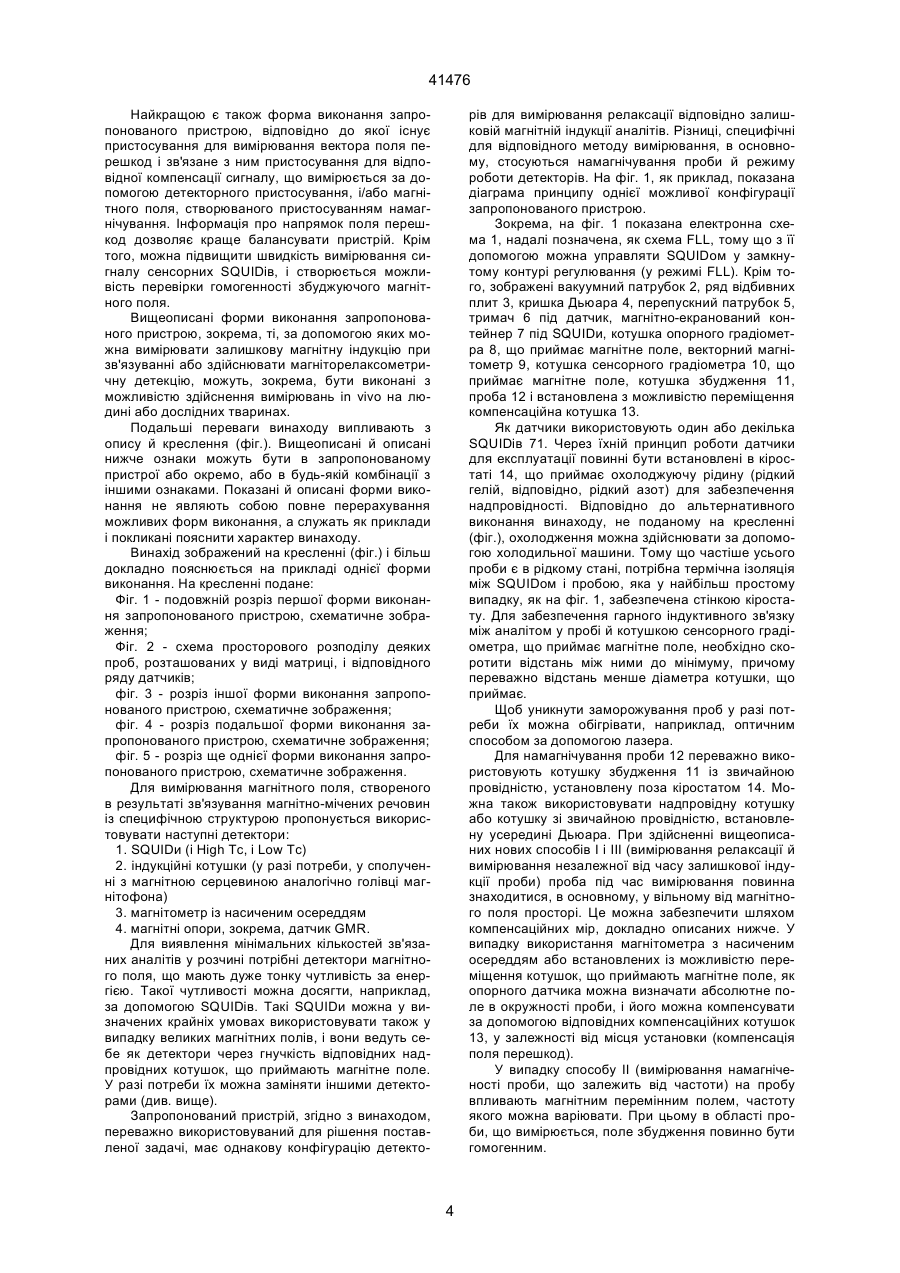
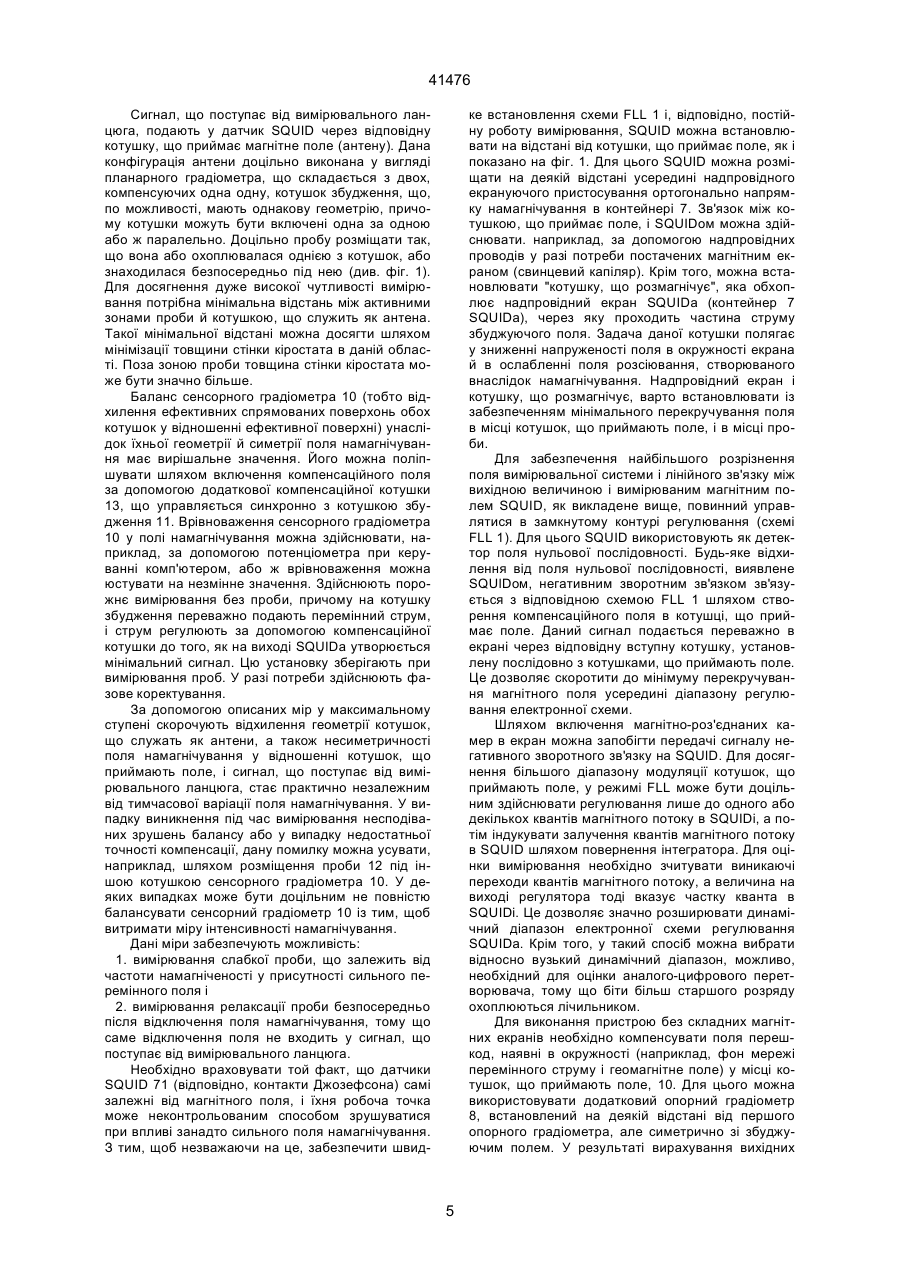
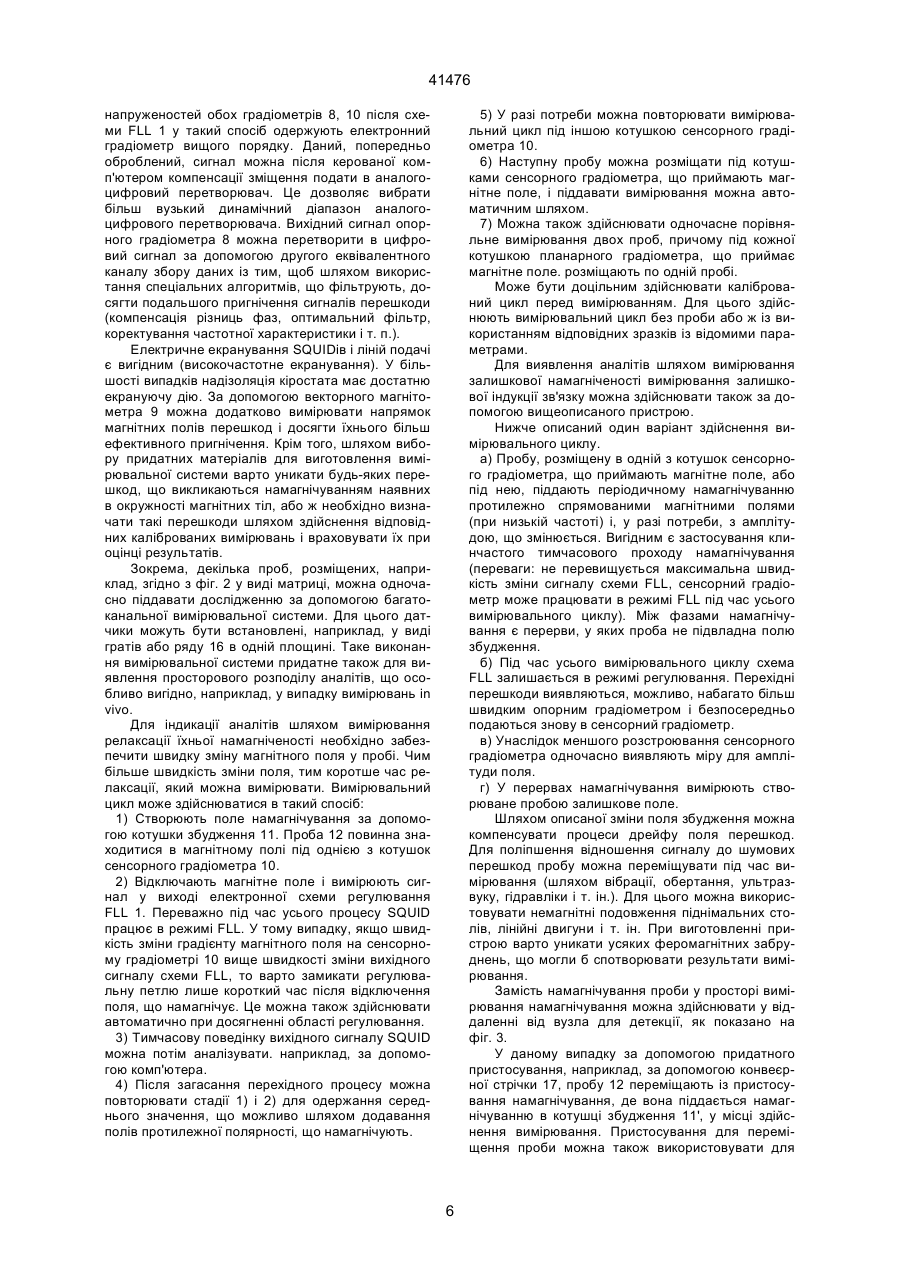
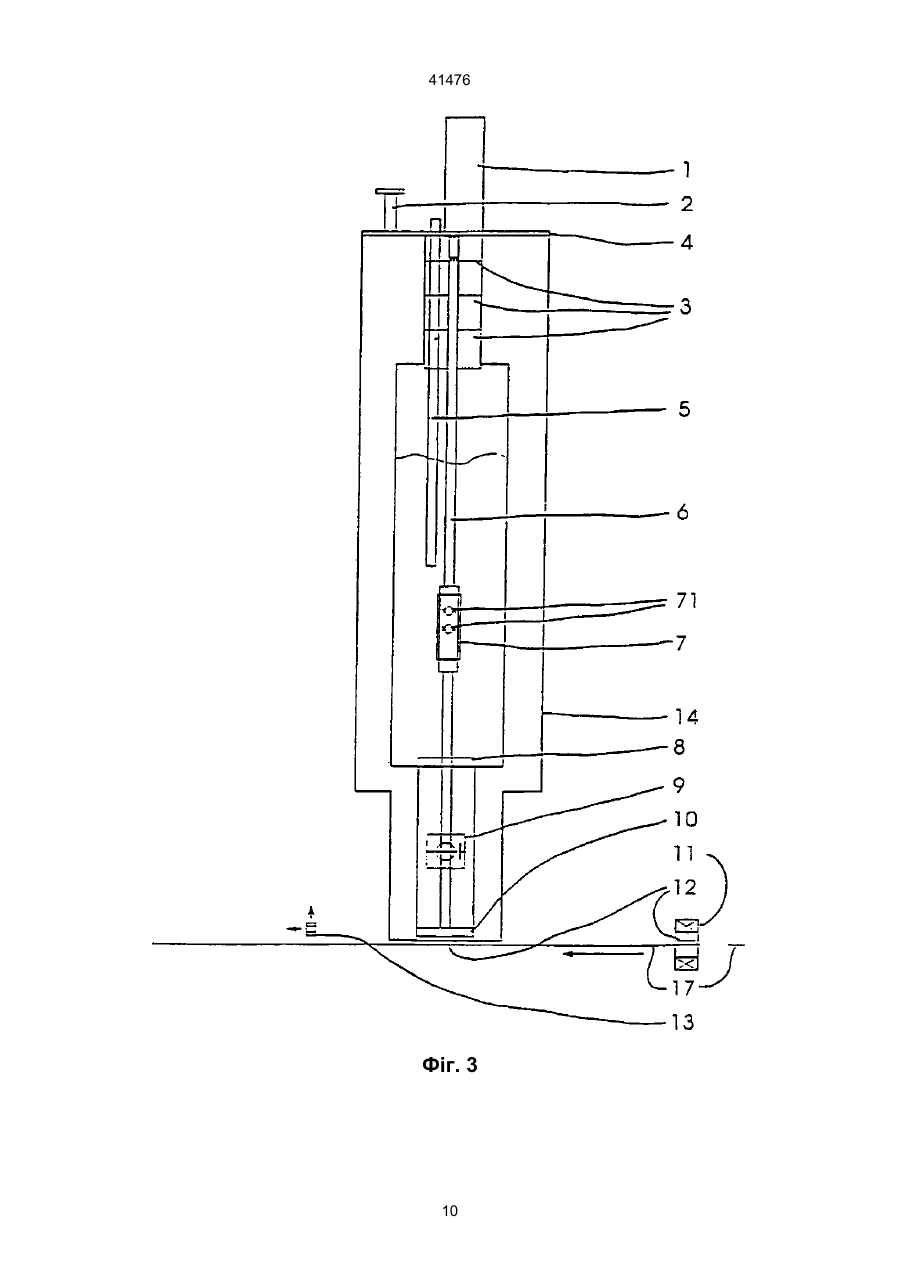
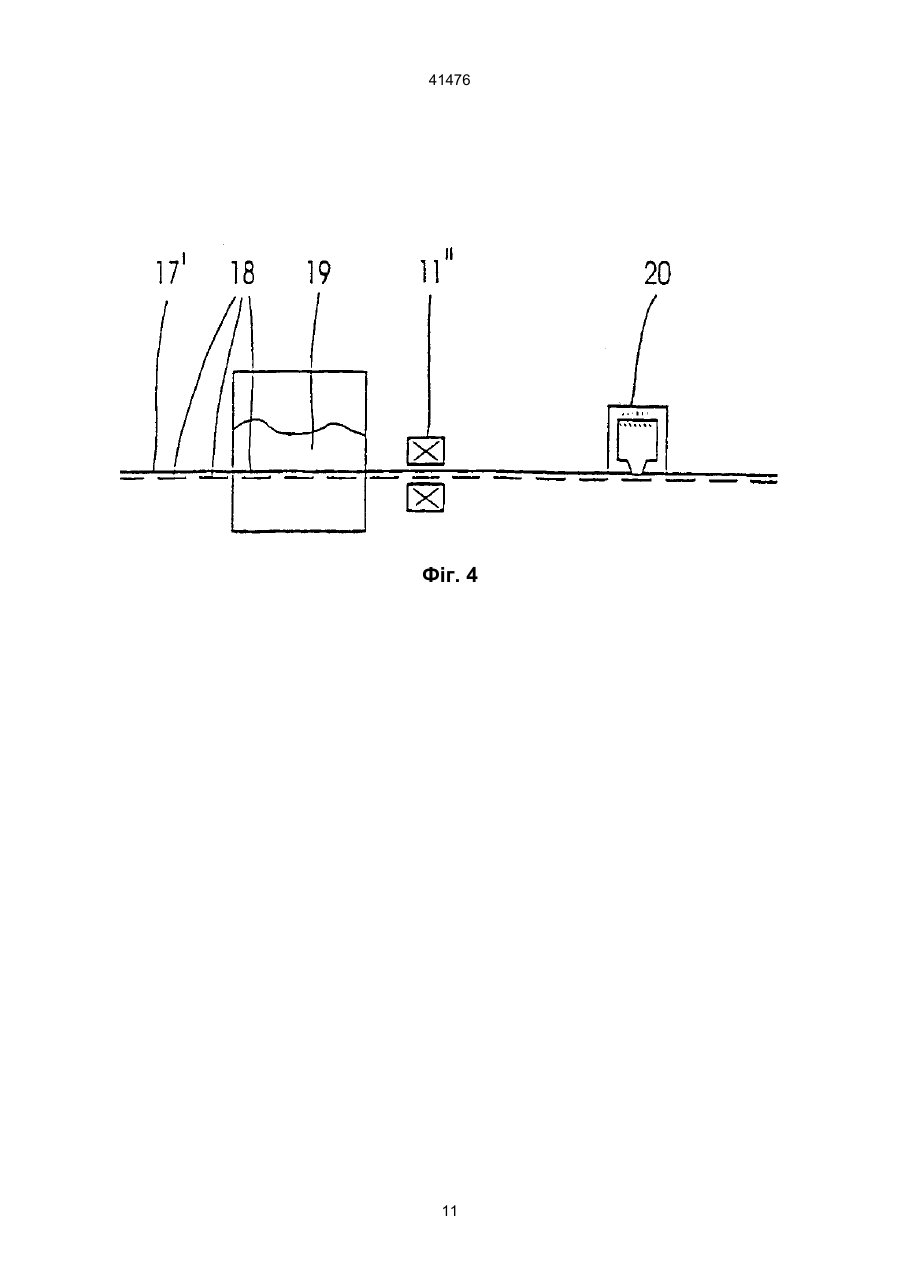
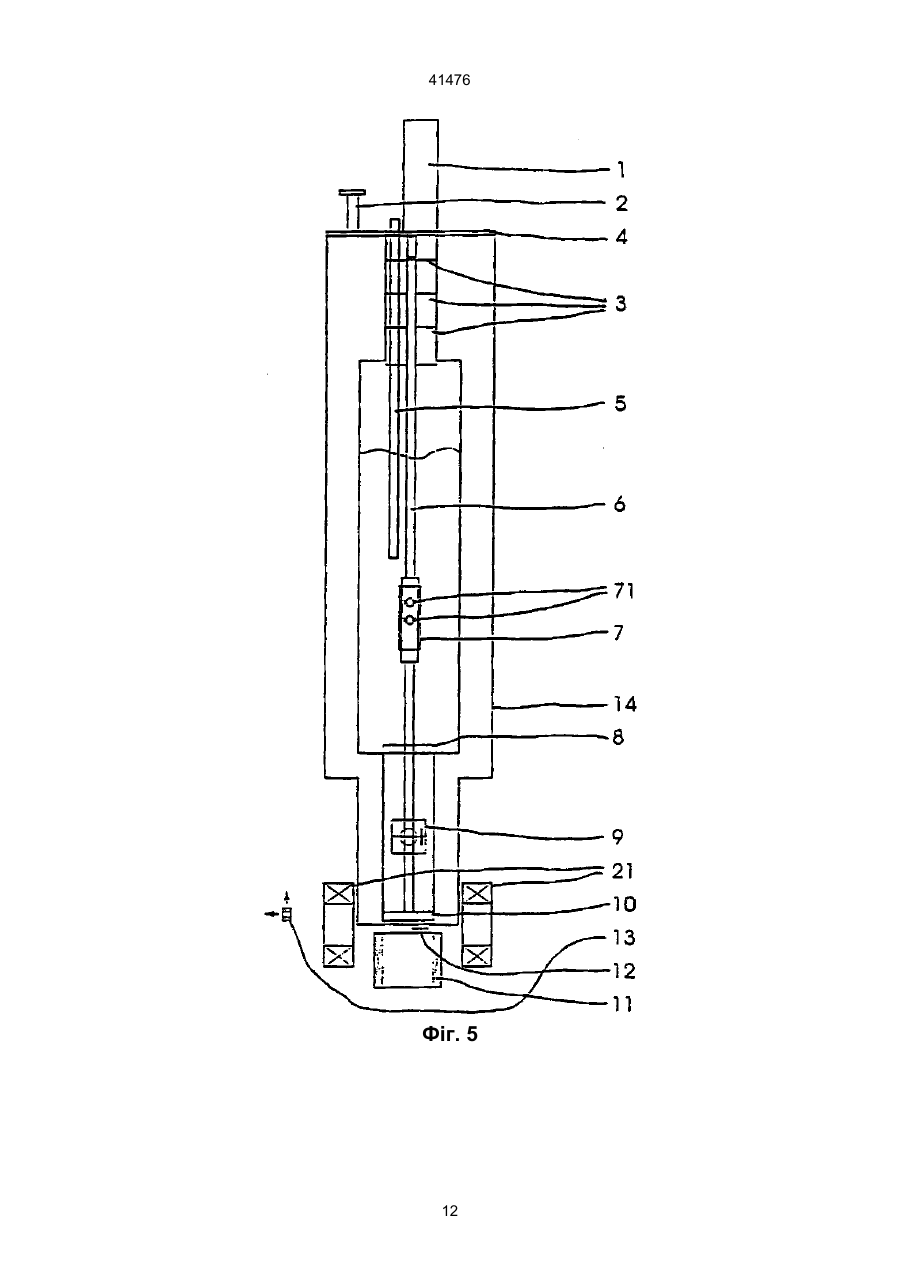
1. Пристрій для високочутливої магнітної детекції аналітів, що містить пристосування намагнічування для створення магнітного поля в місці проби і детекторне пристосування для вимірювання магнітних властивостей проби, який відрізняється тим, що пристосування намагнічування (11'; 11") розміщене в такому положенні щодо детекторного пристосування (71, 8, 9, 10; 16; 20), що магнітне поле, створюване за допомогою пристосування намагнічування (11'; 11") у місці намагнічування, ослаблене, щонайменше, на чинник 10 у місці, де знаходиться проба під час вимірювання. 2. Пристрій згідно з п. 1, який відрізняється тим, що магнітне поле ослаблене на чинник 1000 або більше. 3. Пристрій згідно з пп. 1 або 2, який відрізняється тим, що він містить пристосування (17; 17') для приведення проби (12) у рух під час вимірювальної фази детекторного пристосування (71, 8, 9, 10; 16; 20). 4. Пристрій для високочутливої магнітної детекції аналітів, що містить пристосування намагнічування для створення магнітного поля в місці проби і детекторне пристосування для вимірювання магнітних властивостей проби, який відрізняється тим, що містить вимикач, який служить для відключення магнітного поля пристосування намагнічування (11) у місці проби (12) у визначений період, зокрема під час вимірювальної фази детекторного пристосування (71, 8, 9, 10; 16), і пристосування (17; 17') для приведення проби (12) у рух під час вимірювальної фази детекторного пристосування (71, 8, 9, 10; 16; 20). 5. Пристрій для високочутливої магнітної детекції аналітів, що містить пристосування намагнічуван C2 (54) ПРИСТРІЙ ДЛЯ ВИСОКОЧУТЛИВОЇ МАГНІТНОЇ ДЕТЕКЦІЇ АНАЛІТІВ (ВАРІАНТИ) 41476 лярності магнітного поля, що наперед визначається, створюваного у пристосуванні намагнічування (11; 21). 15. Пристрій згідно з будь-яким із попередніх пунктів, який відрізняється тим, що містить пристосування для електронного пригнічення паразитних сигналів. 16. Пристрій згідно з п. 15, який відрізняється тим, що пристосування для електронного пригнічення паразитних сигналів включає вузол для адаптивної фільтрації. 17. Пристрій згідно з будь-яким із попередніх пунктів, який відрізняється тим, що містить пристосування (9) для вимірювання вектора поля перешкод і зв'язане з ним пристосування для відповідної компенсації сигналу, що вимірюється за допомогою детекторного пристосування (71, 8, 9, 10; 16; 21) і/або магнітного поля, створюваного пристосуванням намагнічування (11). 18. Пристрій згідно з будь-яким із попередніх пунктів, зокрема згідно з п. 7 або 8, який відрізняється тим, що він настроєний для здійснення вимірювань in vivo. Винахід стосується пристрою для якісної і/або кількісної індикації аналітів у пробі, зокрема, біологічній пробі, через зв'язування рецепторів і лігандів, за допомогою пристосування намагнічування для створення магнітного поля в місці проби і детекторного пристосування для вимірювання магнітних властивостей проби. Як прототип прийняте технічне рішення, наведене в JP 3-220442 А опубл. 27.09.91 р., МПК G01N33/483, в якому розкритий спосіб вимірювання для здійснення імунологічного аналізу аглютинації, відповідно до якого ступінь викликаної антитілами аглютинації вимірюють шляхом розкритого у даному джерелі способу вимірювання розміру частки агломерованих магнітних часток. Спосіб полягає у створенні магнітного поля, що проходить через пробу, яка не рухається, наявну в рідкому виді, і вимірюванні залишкової магнітної індукції агломерованих магнітних часток. Відповідно до джерела JP 3-220442 А ступінь аглютинації можна також визначати шляхом оптичних методів вимірювання розміру часток. Таким чином, розкритий спосіб являє собою винятково метод визначення розмірів одержуваних шляхом аглютинації магнітних часток, при цьому даний спосіб можна використовувати тільки для агломератів магнітних часток, причому розмір агломератів знаходиться в області мікрометрів. Таким чином, бажано: 1. у достатньому ступені пригнічувати зовнішні паразитні сигнали (наприклад, фон мережі, коливання магнітного поля землі), і, по можливості, не створював внутрішніх паразитних сигналів, 2. відмовитися від складних магнітних екрануючих мір і 3. забезпечити швидку й просту заміну проб. Тому для здійснення зазначених нових способів потрібно створення нового пристрою, який шляхом вимірювання магнітних властивостей проб забезпечує високочутливу кількісну і якісну детекцію зв'язування рецепторів і лігандів. Через те, що немає пристроїв, придатних для серійного, економічного здійснення вищеописаних нових методів вимірювання, задачею цього винаходу є створенняпристроїв вищеописаного типу, які б дозволяли здійснювати нові методи вимірювання. Відповідно до одного з варіантів цього винаходу зазначена задача вирішується тим, що у пристрої з вищеописаними ознаками пристосування намагнічуванню розміщене в такому положенні щодо детекторного пристосування, що магнітне поле, створене за допомогою пристосування намагнічування в місці намагнічування, ослаблене, щонайменше, на чинник 10, переважно, на чинник 1000 або більше в місці, де знаходиться проба під час вимірювання. Відповідно до іншого варіанта цього винаходу вищевказана задача вирішується тим, що є вимикач, за допомогою якого можна у визначений період, зокрема, під час вимірювальної фази детекторного пристосування, відключити магнітне поле пристосування намагнічування в місці проби, і пристосування для приведення проби у рух під час вимірювальної фази детекторного пристосування. У такий спосіб можливе вимірювання залишкової індукції без поля, що намагнічує, яке змінюється тимчасово. Відповідно до даного варіанта винаходу співвідношення сигналу і шумових перешкод можна вирішальним способом поліпшувати шляхом усереднення й фільтрації. Крім того, даний варіант винаходу дозволяє спростити й автоматизувати переміщення проб, а також автоматизувати роботу усієї вимірювальної системи при великій кількості проб. Істотним при цьому є те, що, хоча у запропонованому пристрої проба піддається намагнічуванню, вимірювання магнітних властивостей проби здійснюється у відсутності, відповідно при достатньому ослабленні, поля, що намагнічує, (під час вимірювальної фази). Цього можна досягти або шляхом просторового розділу пристосування намагнічування і детекторного пристосування, або шляхом тимчасового розділу процесу намагнічування й процесу вимірювання. При застосуванні запропонованого пристрою для здійснення вищеописаних нових методів вирішальна перевага полягає в тому, що вимірювальний сигнал зв'язаних магнітних міток чітко відрізняється від сигналу магнітних міток, що не зв'язалися, завдяки чому не потрібний розділ міток, що не зв'язалися, і зв'язаних. Крім того, кінетику зв'язування можна досліджувати без заміни проби. Крім того, запропонований пристрій при здійсненні нових методів дозволяє одночасно визначати декілька аналітів в одній комплексній пробі (Multianalytassay). У пристрої, відповідно до першого варіанта винаходу, просторове відділення пристосування намагнічування від місця вимірювання дозволяє вибрати дуже високу напруженість поля, що намагнічує, без впливу на детекторне пристосування. Намагнічування можна почати вже під час процесу 2 41476 зв'язування. Підготовку проб можна здійснювати на відстані від місця вимірювання, наприклад, у різних лабораторіях або навіть у різних містах. Для намагнічування можна також використовувати постійні магніти, що не потребують подачі енергії під час намагнічування. У пристрої, відповідно до вищеописаного другого варіанта винаходу, необхідне для намагнічування проби поле можна відключати, тобто вимірювання можна здійснювати у відсутності поля, що намагнічує. Найкращою є форма виконання винаходу, згідно з якою детекторне пристосування містить обладнання для вимірювання намагніченості проби. При таких пробах намагніченість є тією вимірювальною величиною, яку можна визначати з найбільш високою точністю. Вигідною є також форма виконання винаходу, згідно з якою детекторне пристосування містить обладнання для вимірювання залишкової індукції зв'язування аналіта у пробі. Вимірювання залишкової індукції зв'язування дозволяє одночасну індикацію декількох аналітів в одній комплексній пробі. Крім того, підготовку проб можна здійснювати на відстані від місця вимірювання, наприклад, у різних лабораторіях або в різних місцях. І даний вид вимірювання досягає високої чутливості детекції, причому підготовка проб і здійснення вимірювання є відносно простими. Вимірювання залишкової індукції зв'язування можна також застосовувати для дослідження in vivo. Здійснення вимірювання in vivo також можливе при формі виконання запропонованого пристрою, згідно з якою детекторне пристосування містить обладнання для магніторелаксометричної детекції. Таке обладнання дозволяє скоротити тривалість вимірювання, що дає можливість здійснити реакційні кінетики з високим тимчасовим розрізненням. Найкращою є форма виконання, у якій детекторне пристосування містить, щонайменше, один SQUID (=Superconductig Quantum Interference Device) як частину датчика магнітного поля, тому що SQUIDи являють собою найбільш чутливі зі всіх відомих дотепер датчиків магнітного поля. Згідно з подальшою формою виконання винаходу детекторне пристосування містить, щонайменше, одну котушку індуктивності, яка представляє собою частину датчика магнітного поля. Монтаж таких котушок індуктивності простий, вартість їхнього виготовлення низька, і вони відносно чутливі при високих частотах. Згідно з третім варіантом винаходу передбачений вимикач, здатний до відключення магнітного поля пристосування намагнічування в місці проби на визначений час, зокрема, під час вимірювальної фази детекторного пристосування. Вимикач включає перший вузол для включення й відключення магнітного поля, створюваного в пристосуванні намагнічування, і другий вузол для включення й відключення детекторного пристосування. Згідно з кращою формою виконання даного варіанта винаходу перший і другий вузли можна включати незалежно друг від друга. Завдяки цьому вимірювання можна почати після відключення магнітного поля і відповідного тимчасового проміжку. Згідно з варіантом вищеописаної форми виконання винаходу перший вузол виконаний з можливістю включення у визначеному незмінному тимчасовому відношенні до другого вузла. Вибір придатного моменту включення при даній формі виконання винаходу дозволяє окремо здійснювати процеси більш короткої тривалості і, тим самим, виборче прийняття сигналів. Крім того, зв'язане з цим визначення найбільш раннього моменту включення вимірювального вузла дозволяє поліпшувати співвідношення сигналу і шумових перешкод при релаксаційних вимірюваннях. Кращим є також варіант трьох останніх форм виконання винаходу, відповідно до якого перший вузол, виконаний із можливістю створення визначених амплітуди й полярності магнітного поля, створюваного у пристосування намагнічування. Це дозволяє, з одного боку, особливо цілеспрямовано намагнічувати пробу, а, з іншого боку - поліпшувати співвідношення сигналу і шумових перешкод шляхом тимчасового усереднення за декілька періодів. Цього можна досягти, наприклад, шляхом амплітудного обмеження. Дані форми виконання винаходу є особливо придатними для індикації декількох аналітів в одній пробі. Згідно з варіантом останньої форми виконання перший вузол виконаний з можливістю забезпечення тимчасового режиму амплітуди, що наперед визначається, і тимчасового режиму полярності магнітного поля, що наперед визначається, створюваного у пристосуванні намагнічування. Це дозволяє здійснювати вимірювання залишкової магнітної індукції без переміщення проби. Принцип вимірювання залишкової індукції при зв'язуванні можна також застосовувати при вимірюваннях in vivo. Крім того, можливе виявлення декількох аналітів в одній пробі. Далі, можна легко компенсувати постійні, відповідно, стаціонарні зовнішні магнітні поля. Співвідношення сигналу і шумових перешкод можна далі поліпшити шляхом проведення порівняльних вимірювань і методів усереднення. Пристрій дозволяє також вимірювати криву намагнічування, і, крім того, система SQUIDов може працювати постійно в більш докладно описаному нижче режимі FLL, тим самим можна вимірювати саме прикладене магнітне поле. Особливо вигідною є також форма виконання запропонованого пристрою, згідно з якою існує пристосування для електронного пригнічення паразитних сигналів. Цим досягається ще більш високе співвідношення сигналу і шумових перешкод, а також є можливість здійснення неекранованих вимірювань. Завдяки цьому можна відмовитися від складних і дорогих екрануючих пристосувань. Крім того, такі пристрої можна застосовувати майже при будь-яких зовнішніх умовах. Результати при цьому є, в основному, незалежними від місця здійснення вимірювання. Згідно з варіантом даної форми виконання винаходу пристосування для електронного пригнічення паразитних сигналів включає вузол для адаптивної фільтрації. Це далі поліпшує співвідношення сигналу і шумових перешкод, тому що паразитні сигнали активно пригнічуються. Крім того, пристосовування до збуджуючого сигналу зв'язане з підвищеною чутливістю детекції. 3 41476 Найкращою є також форма виконання запропонованого пристрою, відповідно до якої існує пристосування для вимірювання вектора поля перешкод і зв'язане з ним пристосування для відповідної компенсації сигналу, що вимірюється за допомогою детекторного пристосування, і/або магнітного поля, створюваного пристосуванням намагнічування. Інформація про напрямок поля перешкод дозволяє краще балансувати пристрій. Крім того, можна підвищити швидкість вимірювання сигналу сенсорних SQUIDів, і створюється можливість перевірки гомогенності збуджуючого магнітного поля. Вищеописані форми виконання запропонованого пристрою, зокрема, ті, за допомогою яких можна вимірювати залишкову магнітну індукцію при зв'язуванні або здійснювати магніторелаксометричну детекцію, можуть, зокрема, бути виконані з можливістю здійснення вимірювань in vivo на людині або дослідних тваринах. Подальші переваги винаходу випливають з опису й креслення (фіг.). Вищеописані й описані нижче ознаки можуть бути в запропонованому пристрої або окремо, або в будь-якій комбінації з іншими ознаками. Показані й описані форми виконання не являють собою повне перерахування можливих форм виконання, а служать як приклади і покликані пояснити характер винаходу. Винахід зображений на кресленні (фіг.) і більш докладно пояснюється на прикладі однієї форми виконання. На кресленні подане: Фіг. 1 - подовжній розріз першої форми виконання запропонованого пристрою, схематичне зображення; Фіг. 2 - схема просторового розподілу деяких проб, розташованих у виді матриці, і відповідного ряду датчиків; фіг. 3 - розріз іншої форми виконання запропонованого пристрою, схематичне зображення; фіг. 4 - розріз подальшої форми виконання запропонованого пристрою, схематичне зображення; фіг. 5 - розріз ще однієї форми виконання запропонованого пристрою, схематичне зображення. Для вимірювання магнітного поля, створеного в результаті зв'язування магнітно-мічених речовин із специфічною структурою пропонується використовувати наступні детектори: 1. SQUIDи (і High Тс, і Low Тс) 2. індукційні котушки (у разі потреби, у сполученні з магнітною серцевиною аналогічно голівці магнітофона) 3. магнітометр із насиченим осереддям 4. магнітні опори, зокрема, датчик GMR. Для виявлення мінімальних кількостей зв'язаних аналітів у розчині потрібні детектори магнітного поля, що мають дуже тонку чутливість за енергією. Такої чутливості можна досягти, наприклад, за допомогою SQUIDiв. Такі SQUIDи можна у визначених крайніх умовах використовувати також у випадку великих магнітних полів, і вони ведуть себе як детектори через гнучкість відповідних надпровідних котушок, що приймають магнітне поле. У разі потреби їх можна заміняти іншими детекторами (див. вище). Запропонований пристрій, згідно з винаходом, переважно використовуваний для рішення поставленої задачі, має однакову конфігурацію детекто рів для вимірювання релаксації відповідно залишковій магнітній індукції аналітів. Різниці, специфічні для відповідного методу вимірювання, в основному, стосуються намагнічування проби й режиму роботи детекторів. На фіг. 1, як приклад, показана діаграма принципу однієї можливої конфігурації запропонованого пристрою. Зокрема, на фіг. 1 показана електронна схема 1, надалі позначена, як схема FLL, тому що з її допомогою можна управляти SQUIDом у замкнутому контурі регулювання (у режимі FLL). Крім того, зображені вакуумний патрубок 2, ряд відбивних плит 3, кришка Дьюара 4, перепускний патрубок 5, тримач 6 під датчик, магнітно-екранований контейнер 7 під SQUIDи, котушка опорного градіометра 8, що приймає магнітне поле, векторний магнітометр 9, котушка сенсорного градіометра 10, що приймає магнітне поле, котушка збудження 11, проба 12 і встановлена з можливістю переміщення компенсаційна котушка 13. Як датчики використовують один або декілька SQUIDiв 71. Через їхній принцип роботи датчики для експлуатації повинні бути встановлені в кіростаті 14, що приймає охолоджуючу рідину (рідкий гелій, відповідно, рідкий азот) для забезпечення надпровідності. Відповідно до альтернативного виконання винаходу, не поданому на кресленні (фіг.), охолодження можна здійснювати за допомогою холодильної машини. Тому що частіше усього проби є в рідкому стані, потрібна термічна ізоляція між SQUIDом і пробою, яка у найбільш простому випадку, як на фіг. 1, забезпечена стінкою кіростату. Для забезпечення гарного індуктивного зв'язку між аналітом у пробі й котушкою сенсорного градіометра, що приймає магнітне поле, необхідно скоротити відстань між ними до мінімуму, причому переважно відстань менше діаметра котушки, що приймає. Щоб уникнути заморожування проб у разі потреби їх можна обігрівати, наприклад, оптичним способом за допомогою лазера. Для намагнічування проби 12 переважно використовують котушку збудження 11 із звичайною провідністю, установлену поза кіростатом 14. Можна також використовувати надпровідну котушку або котушку зі звичайною провідністю, встановлену усередині Дьюара. При здійсненні вищеописаних нових способів І і III (вимірювання релаксації й вимірювання незалежної від часу залишкової індукції проби) проба під час вимірювання повинна знаходитися, в основному, у вільному від магнітного поля просторі. Це можна забезпечити шляхом компенсаційних мір, докладно описаних нижче. У випадку використання магнітометра з насиченим осереддям або встановлених із можливістю переміщення котушок, що приймають магнітне поле, як опорного датчика можна визначати абсолютне поле в окружності проби, і його можна компенсувати за допомогою відповідних компенсаційних котушок 13, у залежності від місця установки (компенсація поля перешкод). У випадку способу II (вимірювання намагніченості проби, що залежить від частоти) на пробу впливають магнітним перемінним полем, частоту якого можна варіювати. При цьому в області проби, що вимірюється, поле збудження повинно бути гомогенним. 4 41476 Сигнал, що поступає від вимірювального ланцюга, подають у датчик SQUID через відповідну котушку, що приймає магнітне поле (антену). Дана конфігурація антени доцільно виконана у вигляді планарного градіометра, що складається з двох, компенсуючих одна одну, котушок збудження, що, по можливості, мають однакову геометрію, причому котушки можуть бути включені одна за одною або ж паралельно. Доцільно пробу розміщати так, що вона або охоплювалася однією з котушок, або знаходилася безпосередньо під нею (див. фіг. 1). Для досягнення дуже високої чутливості вимірювання потрібна мінімальна відстань між активними зонами проби й котушкою, що служить як антена. Такої мінімальної відстані можна досягти шляхом мінімізації товщини стінки кіростата в даній області. Поза зоною проби товщина стінки кіростата може бути значно більше. Баланс сенсорного градіометра 10 (тобто відхилення ефективних спрямованих поверхонь обох котушок у відношенні ефективної поверхні) унаслідок їхньої геометрії й симетрії поля намагнічування має вирішальне значення. Його можна поліпшувати шляхом включення компенсаційного поля за допомогою додаткової компенсаційної котушки 13, що управляється синхронно з котушкою збудження 11. Врівноваження сенсорного градіометра 10 у полі намагнічування можна здійснювати, наприклад, за допомогою потенціометра при керуванні комп'ютером, або ж врівноваження можна юстувати на незмінне значення. Здійснюють порожнє вимірювання без проби, причому на котушку збудження переважно подають перемінний струм, і струм регулюють за допомогою компенсаційної котушки до того, як на виході SQUIDa утворюється мінімальний сигнал. Цю установку зберігають при вимірювання проб. У разі потреби здійснюють фазове коректування. За допомогою описаних мір у максимальному ступені скорочують відхилення геометрії котушок, що служать як антени, а також несиметричності поля намагнічування у відношенні котушок, що приймають поле, і сигнал, що поступає від вимірювального ланцюга, стає практично незалежним від тимчасової варіації поля намагнічування. У випадку виникнення під час вимірювання несподіваних зрушень балансу або у випадку недостатньої точності компенсації, дану помилку можна усувати, наприклад, шляхом розміщення проби 12 під іншою котушкою сенсорного градіометра 10. У деяких випадках може бути доцільним не повністю балансувати сенсорний градіометр 10 із тим, щоб витримати міру інтенсивності намагнічування. Дані міри забезпечують можливість: 1. вимірювання слабкої проби, що залежить від частоти намагніченості у присутності сильного перемінного поля і 2. вимірювання релаксації проби безпосередньо після відключення поля намагнічування, тому що саме відключення поля не входить у сигнал, що поступає від вимірювального ланцюга. Необхідно враховувати той факт, що датчики SQUID 71 (відповідно, контакти Джозефсона) самі залежні від магнітного поля, і їхня робоча точка може неконтрольованим способом зрушуватися при впливі занадто сильного поля намагнічування. З тим, щоб незважаючи на це, забезпечити швид ке встановлення схеми FLL 1 і, відповідно, постійну роботу вимірювання, SQUID можна встановлювати на відстані від котушки, що приймає поле, як і показано на фіг. 1. Для цього SQUID можна розміщати на деякій відстані усередині надпровідного екрануючого пристосування ортогонально напрямку намагнічування в контейнері 7. Зв'язок між котушкою, що приймає поле, і SQUIDом можна здійснювати. наприклад, за допомогою надпровідних проводів у разі потреби постачених магнітним екраном (свинцевий капіляр). Крім того, можна встановлювати "котушку, що розмагнічує", яка обхоплює надпровідний екран SQUIDa (контейнер 7 SQUIDa), через яку проходить частина струму збуджуючого поля. Задача даної котушки полягає у зниженні напруженості поля в окружності екрана й в ослабленні поля розсіювання, створюваного внаслідок намагнічування. Надпровідний екран і котушку, що розмагнічує, варто встановлювати із забезпеченням мінімального перекручування поля в місці котушок, що приймають поле, і в місці проби. Для забезпечення найбільшого розрізнення поля вимірювальної системи і лінійного зв'язку між вихідною величиною і вимірюваним магнітним полем SQUID, як викладене вище, повинний управлятися в замкнутому контурі регулювання (схемі FLL 1). Для цього SQUID використовують як детектор поля нульової послідовності. Будь-яке відхилення від поля нульової послідовності, виявлене SQUlDoм, негативним зворотним зв'язком зв'язується з відповідною схемою FLL 1 шляхом створення компенсаційного поля в котушці, що приймає поле. Даний сигнал подається переважно в екрані через відповідну вступну котушку, установлену послідовно з котушками, що приймають поле. Це дозволяє скоротити до мінімуму перекручування магнітного поля усередині діапазону регулювання електронної схеми. Шляхом включення магнітно-роз'єднаних камер в екран можна запобігти передачі сигналу негативного зворотного зв'язку на SQUID. Для досягнення більшого діапазону модуляції котушок, що приймають поле, у режимі FLL може бути доцільним здійснювати регулювання лише до одного або декількох квантів магнітного потоку в SQUIDi, а потім індукувати залучення квантів магнітного потоку в SQUID шляхом повернення інтегратора. Для оцінки вимірювання необхідно зчитувати виникаючі переходи квантів магнітного потоку, а величина на виході регулятора тоді вказує частку кванта в SQUIDi. Це дозволяє значно розширювати динамічний діапазон електронної схеми регулювання SQUIDa. Крім того, у такий спосіб можна вибрати відносно вузький динамічний діапазон, можливо, необхідний для оцінки аналого-цифрового перетворювача, тому що біти більш старшого розряду охоплюються лічильником. Для виконання пристрою без складних магнітних екранів необхідно компенсувати поля перешкод, наявні в окружності (наприклад, фон мережі перемінного струму і геомагнітне поле) у місці котушок, що приймають поле, 10. Для цього можна використовувати додатковий опорний градіометр 8, встановлений на деякій відстані від першого опорного градіометра, але симетрично зі збуджуючим полем. У результаті вирахування вихідних 5 41476 напруженостей обох градіометрів 8, 10 після схеми FLL 1 у такий спосіб одержують електронний градіометр вищого порядку. Даний, попередньо оброблений, сигнал можна після керованої комп'ютером компенсації зміщення подати в аналогоцифровий перетворювач. Це дозволяє вибрати більш вузький динамічний діапазон аналогоцифрового перетворювача. Вихідний сигнал опорного градіометра 8 можна перетворити в цифровий сигнал за допомогою другого еквівалентного каналу збору даних із тим, щоб шляхом використання спеціальних алгоритмів, що фільтрують, досягти подальшого пригнічення сигналів перешкоди (компенсація різниць фаз, оптимальний фільтр, коректування частотної характеристики і т. п.). Електричне екранування SQUIDів і ліній подачі є вигідним (високочастотне екранування). У більшості випадків надізоляція кіростата має достатню екрануючу дію. За допомогою векторного магнітометра 9 можна додатково вимірювати напрямок магнітних полів перешкод і досягти їхнього більш ефективного пригнічення. Крім того, шляхом вибору придатних матеріалів для виготовлення вимірювальної системи варто уникати будь-яких перешкод, що викликаються намагнічуванням наявних в окружності магнітних тіл, або ж необхідно визначати такі перешкоди шляхом здійснення відповідних каліброваних вимірювань і враховувати їх при оцінці результатів. Зокрема, декілька проб, розміщених, наприклад, згідно з фіг. 2 у виді матриці, можна одночасно піддавати дослідженню за допомогою багатоканальної вимірювальної системи. Для цього датчики можуть бути встановлені, наприклад, у виді гратів або ряду 16 в одній площині. Таке виконання вимірювальної системи придатне також для виявлення просторового розподілу аналітів, що особливо вигідно, наприклад, у випадку вимірювань in vivo. Для індикації аналітів шляхом вимірювання релаксації їхньої намагніченості необхідно забезпечити швидку зміну магнітного поля у пробі. Чим більше швидкість зміни поля, тим коротше час релаксації, який можна вимірювати. Вимірювальний цикл може здійснюватися в такий спосіб: 1) Створюють поле намагнічування за допомогою котушки збудження 11. Проба 12 повинна знаходитися в магнітному полі під однією з котушок сенсорного градіометра 10. 2) Відключають магнітне поле і вимірюють сигнал у виході електронної схеми регулювання FLL 1. Переважно під час усього процесу SQUID працює в режимі FLL. У тому випадку, якщо швидкість зміни градієнту магнітного поля на сенсорному градіометрі 10 вище швидкості зміни вихідного сигналу схеми FLL, то варто замикати регулювальну петлю лише короткий час після відключення поля, що намагнічує. Це можна також здійснювати автоматично при досягненні області регулювання. 3) Тимчасову поведінку вихідного сигналу SQUID можна потім аналізувати. наприклад, за допомогою комп'ютера. 4) Після загасання перехідного процесу можна повторювати стадії 1) і 2) для одержання середнього значення, що можливо шляхом додавання полів протилежної полярності, що намагнічують. 5) У разі потреби можна повторювати вимірювальний цикл під іншою котушкою сенсорного градіометра 10. 6) Наступну пробу можна розміщати під котушками сенсорного градіометра, що приймають магнітне поле, і піддавати вимірювання можна автоматичним шляхом. 7) Можна також здійснювати одночасне порівняльне вимірювання двох проб, причому під кожної котушкою планарного градіометра, що приймає магнітне поле. розміщають по одній пробі. Може бути доцільним здійснювати калібрований цикл перед вимірюванням. Для цього здійснюють вимірювальний цикл без проби або ж із використанням відповідних зразків із відомими параметрами. Для виявлення аналітів шляхом вимірювання залишкової намагніченості вимірювання залишкової індукції зв'язку можна здійснювати також за допомогою вищеописаного пристрою. Нижче описаний один варіант здійснення вимірювального циклу. а) Пробу, розміщену в одній з котушок сенсорного градіометра, що приймають магнітне поле, або під нею, піддають періодичному намагнічуванню протилежно спрямованими магнітними полями (при низькій частоті) і, у разі потреби, з амплітудою, що змінюється. Вигідним є застосування клинчастого тимчасового проходу намагнічування (переваги: не перевищується максимальна швидкість зміни сигналу схеми FLL, сенсорний градіометр може працювати в режимі FLL під час усього вимірювального циклу). Між фазами намагнічування є перерви, у яких проба не підвладна полю збудження. б) Під час усього вимірювального циклу схема FLL залишається в режимі регулювання. Перехідні перешкоди виявляються, можливо, набагато більш швидким опорним градіометром і безпосередньо подаються знову в сенсорний градіометр. в) Унаслідок меншого розстроювання сенсорного градіометра одночасно виявляють міру для амплітуди поля. г) У перервах намагнічування вимірюють створюване пробою залишкове поле. Шляхом описаної зміни поля збудження можна компенсувати процеси дрейфу поля перешкод. Для поліпшення відношення сигналу до шумових перешкод пробу можна переміщувати під час вимірювання (шляхом вібрації, обертання, ультразвуку, гідравліки і т. ін.). Для цього можна використовувати немагнітні подовження піднімальних столів, лінійні двигуни і т. ін. При виготовленні пристрою варто уникати усяких феромагнітних забруднень, що могли б спотворювати результати вимірювання. Замість намагнічування проби у просторі вимірювання намагнічування можна здійснювати у віддаленні від вузла для детекції, як показано на фіг. 3. У даному випадку за допомогою придатного пристосування, наприклад, за допомогою конвеєрної стрічки 17, пробу 12 переміщають із пристосування намагнічування, де вона піддається намагнічуванню в котушці збудження 11', у місці здійснення вимірювання. Пристосування для переміщення проби можна також використовувати для 6 41476 заміни проб 12. Крім того, у результаті відбувається модуляція утвореного пробою магнітного поля у котушок, які приймають магнітне поле. Крім того, можливі наступні міри пригнічення поля перешкод: Для утворення опорних сигналів можна використовувати тривісний векторний магнітометр 9 або векторний градіометр, що складається з трьох магнітометрів у виді SQUIDiв, розміщених ортогонально один щодо одного на бічних стінках куба і працюючих у режимі FLL. Пригнічення перешкод досягають шляхом, відповідним чином оціненого, вирахування опорних сигналів із вихідного сигналу градіометра. Переважно цей процес здійснюють у два кроки. Шляхом ручного врівноважування оцінених вихідних сигналів векторного магнітометра 9 і сенсорного градіометра 10 скорочують динамічний діапазон сигналу, що поступає від вимірювального ланцюга, для наступного аналого-цифрового перетворення і подальшої переробки в комп'ютері. На другому кроці за допомогою придатних алгоритмів окремі сигнали векторних магнітометрів 9 комбінують таким чином, що досягають максимального пригнічення перешкод сигналу, який поступає від вимірювального ланцюга. Цього можна досягти за допомогою пристосованих оптимальних фільтрів, що враховують уже наявні кореляції між сигналами. Перед аналого-цифровим перетворенням кожний сигнал піддається пристосованій компенсації зміщення для оптимації динамічного діапазону перетворювача. Якщо векторний магнітометр 9 настроюють на маленькі індуктивності SQUIDiв, то ширина смуг регулятора в режимі FLL може досягти декілька Мгц, і можна регулювати й компенсувати і перехідні перешкоди. Згідно з іншим варіантом виконання запропонованого пристрою можна також піддавати вимірюванню частки із залишковою намагніченістю, фіксовані на підготовленому придатним способом конвеєрі 17', шляхом переміщення конвеєра повз датчик магнітного поля 20 (аналогічно техніці зчитування магнітної стрічки) (див. фіг. 4). Стрічку 17', забезпечену, наприклад, антигеном 18, переміщають через ванну 19, що містить антитіла, мічені частками із залишковою намагніченістю, потім піддають намагнічуванню з використанням придатної котушки збудження 11", а потім переміщають повз датчик магнітного поля 20. Зокрема, є доцільним шляхом забезпечення конвеєра 17' антигеном 18 лише ділянками виконувати конвеєр із структурою, де ділянки зі зв'язаними частками із залишковою намагніченістю існують поперемінне з вільними від часток ділянками, із забезпеченням визначеної періодичності. При наявності безупинного покриття на конвеєрі 17' вищеописаного ефекту можна досягти шляхом спрямування конвеєра, забезпеченого зв'яза ними частками, міченими залишковою намагніченістю, через перемінне магнітне поле (також аналогічно магнітним стрічкам запису). При обох вищеописаних методах на датчику 20 магнітного поля викликається сигнал із відомою частотою й амплітудою, яка залежить від зв'язування, і при обох методах переважно здійснюють спосіб вимірювання Lock-in, який схожий на застосовувану в магнітофоні техніку. Для вимірювання складних, залежних від частоти магнітних властивостей матеріалу, можна використовувати варіант пристрою, що трохи відрізняється від варіанта згідно з фіг. 1: Кращим є пристосування намагнічування, яке створює гомогенне поле, що намагнічує, у місці котушок сенсорного градіометра, які приймають поле. Гомогенне магнітне поле переважно спрямоване уздовж напрямку найменшої чутливості до магнітного поля котушок, що приймають магнітне поле, і його можна створити, наприклад, із конфігурацією котушок Гельмгольца 21. Аналогічно вищеописаним компенсаційним мірам сенсорний градіометр можна настроювати на найменшу чутливість до поля збудження. На пристосування намагнічування подається перемінний струм перемінної частоти (враховується поверхневий ефект і залежне від частоти розсіювання котушки збудження). Залежну від часу намагніченість, що вимірюється датчиками магнітного поля, оцінюють переважно шляхом методу Lock-in із блокуванням фази відносно також вимірюваної напруженості збуджуючого поля. У такий спосіб можна одержувати величину й фазу намагнічування проби для відповідної частоти збудження. Шляхом порівняння з опорними даними, отриманими шляхом вимірювання незв'язаних аналітів, можна в такий спосіб вимірювати зв'язування аналітів із високою чутливістю. Нарешті, за допомогою показаного на фіг. 5 комбінованого пристрою можна вимірювати зв'язування аналітів шляхом кожного з методів І, II і III. При цьому додатково існує котушка Гельмгольца 21 для здійснення вимірювання сприйнятливості. Такий пристрій служить для кількісної індикації аналітів у рідких і твердих фазах шляхом вимірювання релаксації, вимірювання залишкової індукції зв'язування і шляхом визначення складних магнітних властивостей матеріалу, які залежать від частоти. Вищеописані форми виконання запропонованого пристрою, зокрема, ті, у яких детекторне пристосування містить засоби для вимірювання залишкової індукції зв'язування і/або для магніторелаксометричної детекції, можуть бути виконані спеціально для вимірювання in vivo на людині або тваринах. 7 41476 Фіг. 1 8 41476 Фіг. 2 9 41476 Фіг. 3 10 41476 Фіг. 4 11 41476 Фіг. 5 12 41476 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 13
ДивитисяДодаткова інформація
Назва патенту англійськоюAppliance for high-sensitive magnetic detection of analyts (versions)
Автори англійськоюKoh Hans, Mats Hartmut, Kiotits Roman, Drung Dietmar, Trams Luts, Vaitshis Verner, Zemmler Wolfhard
Назва патенту російськоюУстройство для высокочувствительного магнитного детектирования аналитов (варианты)
Автори російськоюКох Ханс, Матц Хартмут, Кьотитц Роман, Друнг Дитмар, Трамс Лутц, Ваитшис Вернер, Земмлер Вольфхард
МПК / Мітки
МПК: G01N 27/72, G01N 33/487, G01N 33/553, G01N 33/483
Мітки: детекції, високочутливої, пристрій, магнітної, варіанти, аналітів
Код посилання
<a href="https://ua.patents.su/13-41476-pristrijj-dlya-visokochutlivo-magnitno-detekci-analitiv-varianti.html" target="_blank" rel="follow" title="База патентів України">Пристрій для високочутливої магнітної детекції аналітів (варіанти)</a>
Пристрій для магнітної обробки рідини
Номер патенту: 31488
Опубліковано: 15.12.2000
Автори: Біляковський Роман Павлович, Верисоцький Володимир Михайлович, Теперенко Анатолій Григорович, Зейтман Володимир Абрамович, Воронін Євген Георгійович, Шинкевич Євген Борисович, Маркін Петро Іванович
МПК: C02F 1/48
Мітки: обробки, пристрій, магнітної, рідини
Текст:
...з центральними отворами, які зістиковані між собою з утворенням камери » в якій розташован виконаний дисковим магніт , при цьому пристрій обладнаний засобом фіксації магніту . Засіб фіксації магніту виконаний у вигладі П-образнях скоб з немагнітного матеріалу , розташованих між магнктопрово дом 1 «агнітом. Виконання магнітопроводу э двох ковпачків з центральними отворами, які застиковані тіш собою з утворенням камери , в якій розташован...
Спосіб виготовлення тонкоплівкового магнітопровода магнітної головки (його варіанти)

Номер патенту: 2047
Опубліковано: 20.12.1994
Автор: Галанський Владислав Михайлович
МПК: G11B 5/127, G11B 5/31
Мітки: варіанти, його, виготовлення, тонкоплівкового, магнітопровода, головки, спосіб, магнітної
Формула / Реферат:
1. Способ изготовления тонкопленочного магнитопровода магнитной головки, заключающийся в формировании тонкопленочных элементов магнитопровода с рабочим зазором путем вакуумного напыления или химического осаждения на подложку, отличающийся тем, что, с целью улучшения магнитных параметров магнитопровода за счет уменьшения влияния различных коэффициентов расширения при напылении или осаждении, формирование тонкопленочных элементов...
Пристрій для контролю залишкової магнітної індукції постійних магнітів
Номер патенту: 30002
Опубліковано: 15.11.2000
Автори: Коваленко Петро Іванович, Бірюк Сергій Петрович, Кошовий Микола Дмитрович
МПК: C25D 21/12
Мітки: постійних, пристрій, магнітів, індукції, магнітної, контролю, залишкової
Формула / Реферат:
Пристрій для контролю залишкової магнітної індукції постійних магнітів, що включає магніточутливий перетворювач, дві обмотки живлення і дві обмотки зворотного зв'язку, а також операційний підсилювач, до виходу якого під'єднані обмотки живлення, а до входів - обмотки зворотного зв'язку, при цьому одна з обмоток живлення під'єднана до виходу операційного підсилювача початком, а відповідна їй обмотка зворотного зв'язку під'єднана до...
Пакеруючий пристрій для магнітної обробки водно-дисперсних середовищ у свердловинах
Номер патенту: 10387
Опубліковано: 25.12.1996
Автори: Моклович Ігор Михайлович, Шендрік Вадим Миколайович, Лабій Олег Михайлович, Проць Йосип Юрьович, Балакіров Юрій Айрапетович, Світлицький Віктор Михайлович, Сабан Тарас Йосипович
МПК: C02F 1/48
Мітки: пристрій, пакеруючий, обробки, свердловинах, магнітної, водно-дисперсних, середовищ
Формула / Реферат:
1, Пакерующее устройство для магнитной обработки водно-дисперсных сред в скважине, содержащее источник магнитного поля, состоящий из постоянных магнитов, размещенных на диамагнитном корпусе, отличающееся тем, что источник магнитного поля выполнен в виде набора чередующихся подвижных и неподвижных секций магнитных систем, обращенных друг к другу одноименными полюсами и состоящих из параллельно соединенных между собой постоянных магнитов,...
Пристрій для магнітної обробки спирту, води та водноспиртової суміші
Номер патенту: 36504
Опубліковано: 16.04.2001
Автор: Барабанов Костянтин Костянтинович
МПК: C12G 3/02
Мітки: спирту, обробки, пристрій, води, магнітної, водноспиртової, суміші
Текст:
...рідини, який містить корпус, магнітну систему з профільними наконечниками магнітних полюсів, які виконані з випускними профілями таким чином, що площа S поперечного перерізу каналу, утвореного полюсними наконечниками, змінюються уздовж осі за законом: A до одного різнойменними полюсами, а вихід з каналу виконаний у вигляді дросельного отвору, площа поперечного перерізу якого збільшується у напрямі руху потоку рідини таким чином, що...
Попередній патент: Горюча протикомашина фумігантна спіраль, горючий пристрій для виділяння інгредієнту, що впливає на комах, спосіб фумігування навколишнього середовища
Наступний патент: Роторно-поршневий двигун внутрішнього згоряння
Випадковий патент: Зубний імплантат