Спосіб вимірювання хвильових аберацій ока
Номер патенту: 67870
Опубліковано: 15.07.2004
Автори: Молебний Василь Васильович, Ластер Ламар Фредерік, мол., Молебний Сергій Васильович
Формула / Реферат
1. Спосіб вимірювання хвильових аберацій ока, заснований на зондуванні ока вузько спрямованим пучком лазерного випромінювання, прийомі розсіяного сітківкою випромінювання, вимірюванні нахилу хвильового фронту у вигляді перших частинних похідних по координатах у дискретному наборі точок зіниці з відомими координатами, апроксимації хвильового фронту за цими даними у вигляді функцій від координат зіниці та обчисленні хвильових аберацій ока як спотворень апроксимованого хвильового фронту, який відрізняється тим, що визначення перших частинних похідних у будь-якій точці зіниці виконують шляхом сплайнової апроксимації за значеннями в дискретному наборі точок, в яких здійснено вимірювання нахилів хвильового фронту, а хвильовий фронт реконструюють шляхом інтегрування уздовж радіусів з початковою точкою інтегрування в центрі зіниці, де для всіх радіусів початкове значення інтеграла задають однаковим.
2. Спосіб за п. 1, який відрізняється тим, що дискретний набір точок, в яких вимірюють нахил хвильового фронту, розташовують уздовж концентричних кілець з загальним центром, який є центром координат.
3. Спосіб за п. 2, який відрізняється тим, що апроксимацію перших частинних похідних виконують спочатку уздовж кожного кільця, а потім - уздовж радіусів.
4. Спосіб за п. 1, який відрізняється тим, що дискретний набір точок, в яких вимірюють нахил хвильового фронту, розташовують уздовж прямих, паралельних одній з осей прямокутної системи координат.
5. Спосіб за п. 4, який відрізняється тим, що апроксимацію перших частинних похідних виконують уздовж кожної з паралельних прямих, а потім - в ортогональних напрямах.
6. Спосіб за пп. 1 або 3, або 5, який відрізняється тим, що сплайнову апроксимацію по кожній з координат виконують за формулою:
 ,
,
де: ![]() є інтерполяційним кубічним сплайном по узагальненій координаті
є інтерполяційним кубічним сплайном по узагальненій координаті ![]() ;
;
![]() ,
, ![]() , є координатами i-ої та (i+1)-ої точок зіниці з їх дискретного набору, в яких виконано вимірювання нахилу хвильового фронту з відповідними значеннями
, є координатами i-ої та (i+1)-ої точок зіниці з їх дискретного набору, в яких виконано вимірювання нахилу хвильового фронту з відповідними значеннями ![]() ,
, ![]() ;
;
a ![]() ,
, ![]() є значеннями першої похідної в точках
є значеннями першої похідної в точках ![]() ,
, ![]() , що забезпечують неперервність другої похідної S''(х) в цих точках.
, що забезпечують неперервність другої похідної S''(х) в цих точках.
7. Спосіб за п. 1, який відрізняється тим, що значення функції хвильового фронту W(P, Ф) в довільній точці зіниці ока з полярними координатами (Р, Ф) обчислюють за формулою:
![]() d
d ![]() ,
,
де ![]() є поточною координатою по радіусу;
є поточною координатою по радіусу;
а ![]() є заданим значенням поточної координати
є заданим значенням поточної координати ![]() по куту, причому значення
по куту, причому значення ![]() в центрі, тобто коли
в центрі, тобто коли ![]() і
і ![]() - довільне, задають рівним нулю.
- довільне, задають рівним нулю.
8. Спосіб за п. 7, який відрізняється тим, що інтегрування виконують чисельно за формулою:
![]()
![]()
![]()
![]()
![]()
 ,
,
причому відрізок [0,Р] розбивають на N часткових відрізків ![]() так, що
так, що ![]() .
.
9. Спосіб за будь-яким з пп. 1-8, який відрізняється тим, що обчислення хвильових аберацій виконують за даними реконструйованого у вигляді сплайнів хвильового фронту.
Текст
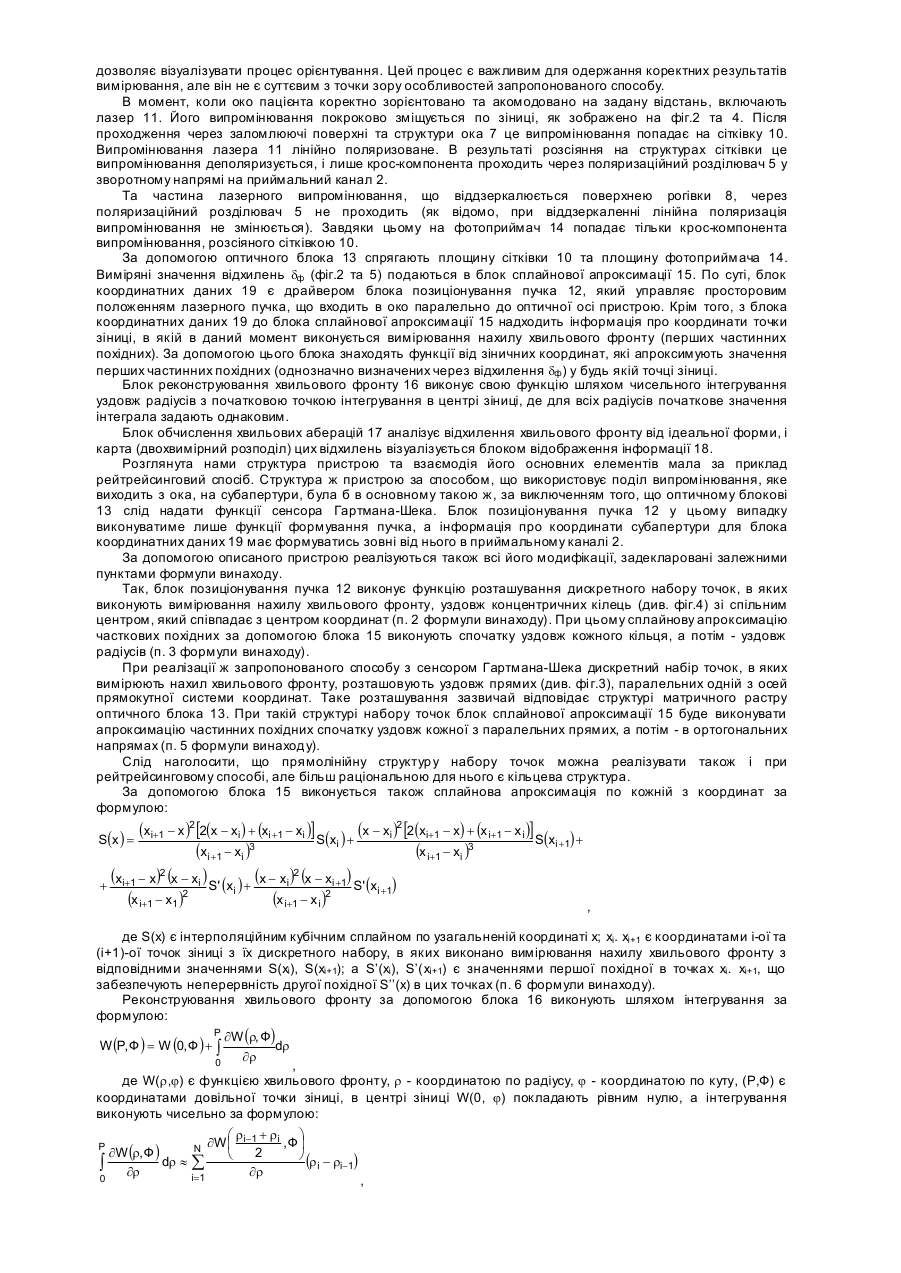
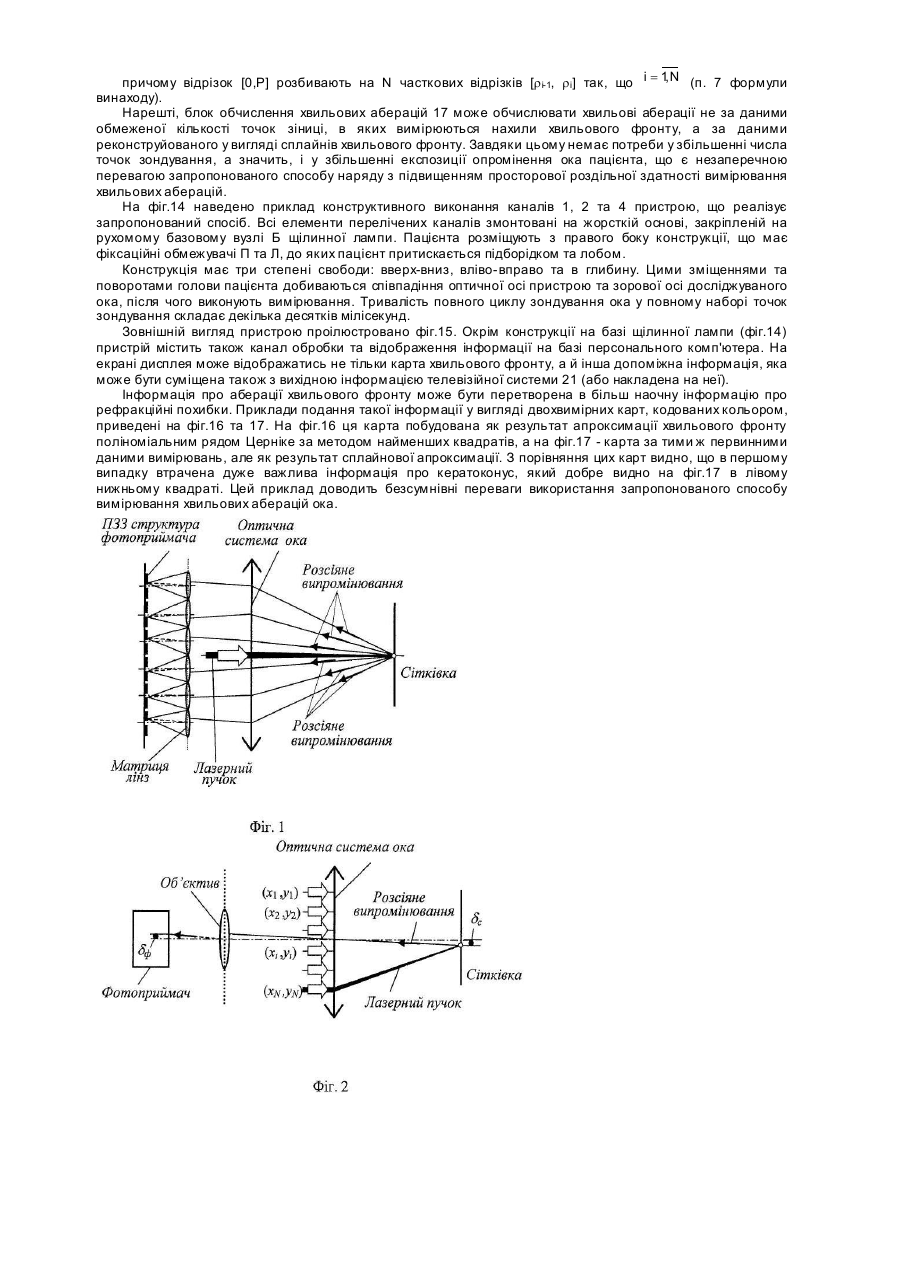
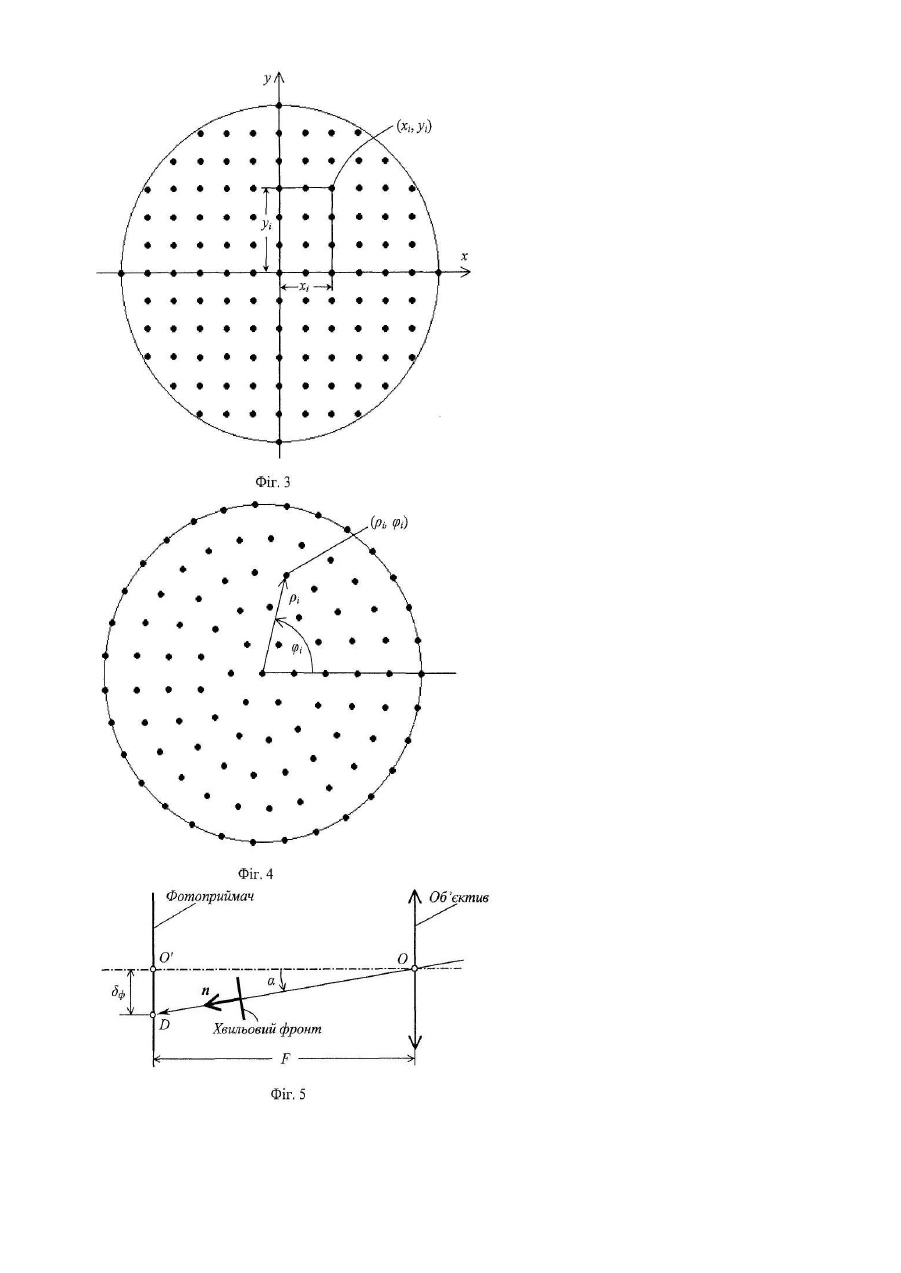
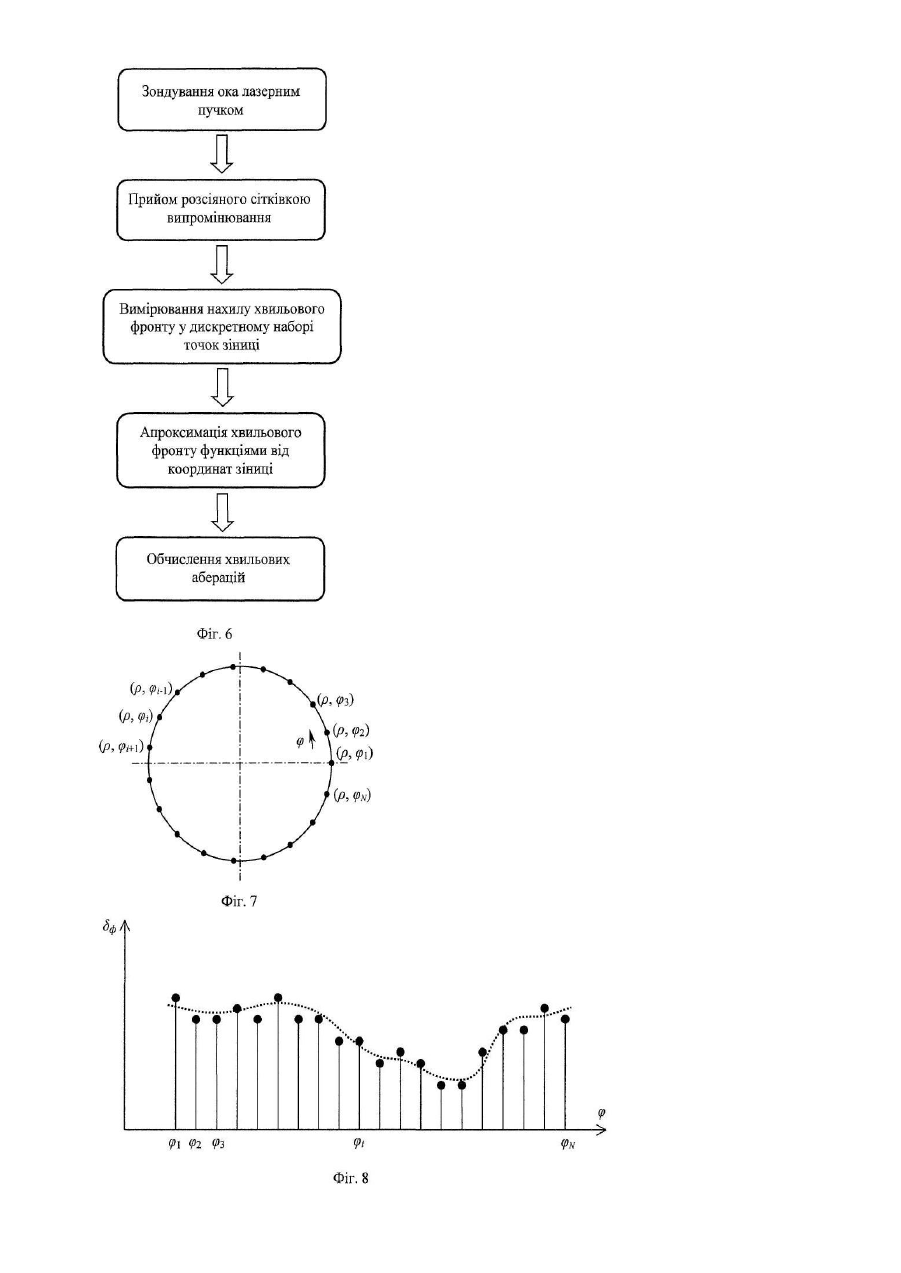
Винахід відноситься до галузі медичної техніки, зокрема до діагностично-вимірювальної техніки, що може бути застосована, наприклад, для високоточних досліджень при корекції зору. Відомі способи вимірювання хвильових аберацій оптичної системи ока як функції просторових зіничних координат. Вони використовують зондування ока вузько спрямованим пучком лазерного випромінювання, його розсіяння сітківкою у зворотному напрямку, прийом за допомогою фотоприймальних пристроїв компоненти, що повернулася з ока, та вимірювання нахилу хвильового фронту в окремих точках зіниці з відомими координатами. За цими даними виконують апроксимацію хвильового фронту та обчислення хвильових аберацій ока як спотворень хвильового фронту. Ряд способів використовує вимірювання структури хвильового фронту на ви ході з ока паралельно в часі, шля хом поділу його на субапертури (D.R. Williams, et al. Rapid, automatic measurement of the eye's wave aberration. US Patent 6,199,986. Int. СІ. А61В3/10, 13.03.2001). Субапертури створюються за допомогою матриці співвісних лінз, у фокуса х яких встановлюють матрицю позиційно чутливи х фотоприймачів. Хвильовий фронт реконструюють за виміряними його нахилами одночасно в усі х субапертура х. Відомий також спосіб рейтрейсингового вимірювання хвильових та рефракційних аберацій (В.В. Молебний та ін. Вимірювач абераційної рефракції ока. Патент України №46833. М. кл. А61В3/00, А61В3/10, А61В3/14. Бюлетень №6, 17.06.2002, пріоритет від 07.10.1998), який є послідовним у часі. За цим способом око також зондують тонким пучком лазерного випромінювання (його перетин на вході ока складає 0,20,3мм), але послідовно у часі зміщують лазерний промінь паралельно до самого себе по вхідній апертурі ока, кожного разу вимірюючи координати точок на сітківці, в які він проектується. За цими даними, одержаними в дискретних точках апертури ока, обчислюють нахил хвильового фронту в цих точках, а потім здійснюють апроксимацію всієї поверхні хвильового фронту. Обидва ці способи використовують апроксимацію хвильового фронту за допомогою рядів, що складаються з поліномів Церніке. При цьому виникають обмеження, пов'язані з особливостями поліномів Церніке, що призводять до нерівномірної просторової роздільної здатності описування рефракційних неоднорідностей по апертурі ока. Так, в центральній зоні, що має найбільше значення для гостроти зору, просторова роздільна здатність описування рефракційних неоднорідностей за допомогою поліномів Церніке нижча, ніж в периферійній зоні. Для одержання вищої роздільної здатності в центрі необхідно використовувати більшу кількість поліномів, а це вимагає виконувати вимірювання в більшій кількості точок апертури, причому не тільки в центрі, але й на периферії, що ускладнює вимірювання: збільшується доза опромінювання ока, значно подовжується та ускладнюється процес обчислень (кількість рівнянь зростає до декількох сотень). Обидва ці способи є рівнозначними з точки зору апроксимації хвильового фронту за допомогою рядів, що складаються з поліномів Церніке. Кожен з них може розглядатися як прототип. Для визначеності приймемо за прототип спосіб рейтрейсингу. В основу винаходу поставлено задачу підвищення роздільної здатності вимірювання рефракційних неоднорідностей рівномірно по всій апертурі ока без ускладнення реалізації способу через непропорційне збільшення кількості точок зондування в центральній зоні та без збільшення протяжності вимірювань, а також без збільшення дози опромінення ока пацієнта. Поставлену задачу вирішують завдяки тому, що в способі, основаному на зондуванні ока вузько спрямованим пучком лазерного випромінювання, прийомі розсіяного сітківкою випромінювання, вимірюванні нахилу хвильового фронту у вигляді перших частинних похідних по координатах у дискретному наборі точок зіниці з відомими координатами, апроксимації хвильового фронту за цими даними у вигляді функцій від координат зіниці та обчисленні хвильових аберацій ока як спотворень апроксимованого хвильового фронту, визначення перших частинних похідних в будь якій точці зіниці виконують шляхом сплайнової апроксимації за значеннями в дискретному наборі точок, в яких здійснено вимірювання нахилів хвильового фронту, а хвильовий фронт реконструюють шляхом інтегрування уздовж радіусів з початковою точкою інтегрування в центрі зіниці, де для всіх радіусів початкове значення інтеграла задають однаковим. Крім того, дискретний набір точок, в яких вимірюють нахил хвильового фронту, розташовують уздовж концентричних кілець з загальним центром, який є центром координат. Крім того, апроксимацію перших частинних похідних виконують спочатку уздовж кожного кільця, а потім - уздовж радіусів. В іншому варіанті дискретний набір точок, в яких вимірюють нахил хвильового фронту, розташовують уздовж прямих, паралельних одній з осей прямокутної системи координат. При цьому апроксимацію перших частинних похідних виконують уздовж кожної з паралельних прямих, а потім - в ортогональних напрямах. Крім того, в наступній реалізації запропонованого способу сплайнову апроксимацію по кожній з координат виконують за формулою: (xi+1 - x )2 [2(x - xi ) + (xi +1 - xi )] S(x ) + (x - xi )2 [2(xi+1 - x) + (x i+1 - x i )] S(x ) + i i +1 (xi +1 - xi )3 (x i+1 - xi )3 (x - x)2 (x - xi ) S' (x ) + (x - xi )2 (x - xi +1) S' (x ) + i+1 i i +1 (x i+1 - x1 )2 (x i+1 - x i )2 , S(x ) = де S(x) є інтерполяційним кубічним сплайном по узагальненій координаті х; хі. хі+1 є координатами і-ої та (і+1)-ої точок зіниці з їх дискретного набору, в яких виконано вимірювання нахилу хвильового фронту з відповідними значеннями S(хi), S(xi+1); a S’(хi), S’(xi+1) є значеннями першої похідної в точках хі. хі+1, що забезпечують неперервність другої похідної S’’(x) в цих точках. Крім того, інтегрування запропоновано виконувати за формулою: ¶W (r, Ф) dr ¶r 0 Р W (Р, Ф ) = W (0, Ф ) + ò , де W(r,j) є функцією хвильового фронту, r - координатою по радіусу, j - координатою по куту, (Р,Ф) є координатами довільної точки зіниці, в центрі зіниці W(0, j) покладають рівним нулю, а інтегрування виконують чисельно за формулою: ær +r ö ¶W ç i-1 i , Ф ÷ Р N ¶W (r, Ф ) 2 è ø (r - r ) ò ¶r dr » å i i-1 ¶r i=1 0 , , причому відрізок [0,Р] розбивають на N часткових відрізків [r і-1, r і] так, що i = 1 N . Підвищення просторової роздільної здатності в центральній зоні без ускладнення процедури вимірювання, а також без збільшення дози опромінювання ока досягається в запропонованому способі завдяки використанню рівномірної по всій апертурі апроксимації хвильового фронту. Розташування дискретного набору точок уздовж концентричних кілець з загальним центром, який співпадає з центром координат також сприяє спрощенню процесу апроксимації перших частинних похідних (спочатку уздовж кожного кільця, а потім - уздовж радіусів). В іншому варіанті спрощення процесу апроксимації перших частинних похідних досягають завдяки розташуванню дискретного набору точок уздовж прямих, паралельних одній з осей прямокутної системи координат та виконанню апроксимації перших частинних похідних спочатку уздовж кожної з паралельних прямих, а потім - в ортогональних напрямах. Рівномірність просторової роздільної здатності по всій апертурі забезпечується використанням інтерполяційного кубічного сплайну S(x) у відповідності до наведеної математичної формули та виконанню умов неперервності його другої похідної S’’(x) в точках апертури, в яких виконано вимірювання нахилу хвильового фронту. Важливою особливістю запропонованого способу є також процедура інтегрування при реконструкції хвильового фронту у відповідності до наведеної математичної формули уздовж радіусів від центру зіниці так, що для всіх радіусів початкове значення інтеграла є однаковим. Сама процедура інтегрування може виконуватись як аналітично, так і чисельно у відповідності до поданих вище формул. Це суттєво спрощує проблеми коректності результатів у центральній зоні, що мала місце при використанні апроксимації за допомогою поліномів Церніке. Суть винаходу пояснюється кресленнями, що складаються з 17 фігур. Фіг.1. Хід променів у вимірювачі аберацій, що використовує сенсори Гартмана-Шека. Фіг.2. Хід променів у рейтрейсинговому вимірювачі аберацій у послідовні моменти часу. Фіг.3. Розташування набору точок вимірювання нахилу хвильового фронту на прямих, паралельних принаймні до однієї з осей координат. Фіг.4. Розташування набору точок вимірювання нахилу хвильового фронту на концентричних кільцях. Фіг.5. Вимірювання нахилу хвильового фронту за координатами проекції лазерного пучка на фотоприймачеві. Фіг.6. Послідовність операцій при вимірюванні хвильових аберацій ока. Фіг.7. Кільцева траєкторія апроксимації. Фіг.8. Результат апроксимації (пунктирна крива) уздовж кільцевої траєкторії при використанні методу найменших квадратів. Фіг.9. Діаграма перетину сітківки (для методу рейтрейсингу й траєкторії, показаної на фіг.7): пунктирна крива - після апроксимації за методом найменших Квадратів (при апроксимації хвильового фронту поліномами Церніке); суцільна крива - після апроксимації за допомогою бікубічних сплайнів. Фіг.10. Діаграми перетину сітківки (для методу рейтрейсингу при чотирьох кільцевих траєкторіях на вхідній апертурі ока) після апроксимації за методом найменших Квадратів (з використанням поліномів Церніке). Фіг.11. Діаграми перетину сітківки (для методу рейтрейсингу при чотирьох кільцевих траєкторіях на вхідній апертурі ока) після апроксимації за допомогою бікубічних сплайнів (для тих же первинних даних, що і на фіг.10). Фіг.12. Послідовність операцій при вимірюванні хвильових аберацій ока за запропонованим способом. Фіг.13. Функціональна схема пристрою для вимірювання хвильових аберацій ока за запропонованим способом. Фіг.14. Конструкція оптичного блоку пристрою для вимірювання хвильових аберацій ока за запропонованим способом. Фіг.15. Загальний вигляд пристрою для вимірювання хвильових аберацій ока за запропонованим способом. Фіг.16. Карта рефракційних похибок, реконструйованих за методом найменших квадратів з використанням поліномів Церніке. Фіг.17. Карта рефракційних похибок, реконструйованих при апроксимації хвильового фронту бікубічними сплайнами. Розглянемо детально реалізацію запропонованого способу для вимірювання хвильових аберацій ока. Фіг.1 пояснює концепцію вимірювання хвильових аберацій ока з використанням сенсора ГартманаШека. Оптична система ока представлена на цьому рисунку у вигляді тонкої лінзи, у фокусі якої знаходиться сітківка. Вузький паралельний лазерний пучок спрямовується в око. Віддається перевага вводу пучка в центральній зоні зіниці ока так, щоб його вісь співпадала з зоровою віссю ока (для спрощення не будемо заглиблюватись у фізіологічні особливості зору, де маємо розрізняти зорову та оптичну осі; будемо використовува ти ці терміни як синоніми). Оптична система ока фокусує лазерний пучок у точку, розмір якої в ідеальному випадку обмежується дифракцією. Ця освітлена точка являє собою вторинний точковий випромінювач, світло від якого розсіюється в деякому просторовому куті, і частина його проходить у зворотному напрямі через зіницю ока. По ходу випромінювання встановлюють матрицю (растр) співвісних мікролінз діаметром порядку 0,3-1,0мм (інколи навіть менше). Ці лінзи мають однакову фокусн у відстань. В їх фокусі встановлюють систему позиційно чутливи х фотоприймачів. Дуже зручно використовувати телевізійну матрицю приладів з зарядовим зв'язком (ПЗЗ). Вимірюють координати кожної світлової точки у фокусах мікролінз. Відхилення положення світлової точки від оптичної осі відповідної лінзи є мірою нахилу хвильового фронту в зоні цієї лінзи (в субапертурі хвильового фронту), що у лінійному наближенні є першою частинною похідною по координатах для даної субапертури хвильового фронту. За цими даними (нахил та координати) апроксимують хвильовий фронт у вигляді функцій від координат зіниці, а потім обчислюють аберації хвильового фронту як його спотворення. Метод рейтрейсингу відрізняється в ряді деталей, але послідовність операцій є такою ж, як і при використанні сенсора Гартмана-Шека. Основна відмінність полягає у послідовному (в часі) вимірюванні нахилів хвильового фронту у його субапертурах. На фіг.2 показано хід променів при рейтрейсингу у послідовні моменти часу. На цьому рисунку оптична система ока також зображена у вигляді тонкої лінзи, у фокусі якої знаходиться сітківка. У перший момент тонкий лазерний пучок спрямовується в око в точці зіниці з координатами (х1, у1). У наступний момент - в точці з координатами (х2, у2). Так продовжується до останньої точки апертури ока з координатами (xN, уN). Кожного разу лазерний пучок проектується на сітківку у ви гляді точки (точка є абстракцією, насправді ж це більш складна фігура, але в першому наближенні її можна вважати точкою). Як і у випадку, описаному вище, ця точка слугує вторинним точковим випромінювачем, завдяки чому її можна спостерігати за допомогою фотоприймача з об'єктивом. Це також є позиційно чутливий фотоприймач, що видає на своєму виході координати спроектованого в його площину зображення точки на сітківці, в яку проектується лазерний пучок при входженні його в зіницю ока в точці з відомими координатами (хi, уi). Відхилення проекції лазерного пучка dc на сітківці однозначно зв'язано з виміряним відхиленням dф в площині фотоприймача. Ця величина є мірою нахилу променя або, що адекватно, мірою нахилу хвильового фронту в точці апертури ока з відомими координатами. Таким чином, як і в першому способі, в результаті цих вимірювань одержують нахил хвильового фронту в точках апертури ока з відомими координатами. За цими даними (як і в першому способі, це нахил та координати) апроксимують хвильовий фронт у вигляді функцій від координат зіниці, а потім обчислюють аберації хвильового фронту як його спотворення. На фіг.3 та 4 зображено розташування набору точок в апертурі ока, в яких вимірюється нахил хвильового фронту, причому на фіг.3 точки цього набору лежать уздовж прямих, паралельних до осей декартової системи координат. Їх координати (хі, уі) теж записуються в прямокутній системі координат. На фіг.4 ці точки розташовані уздовж концентричних кілець. Їх координати зручно описувати в полярній системі координат (r і, jі). У способі з сенсором Гартмана-Шека, як правило, використовують прямокутн у систему координат (фіг.3), а в способі рейтрейсингу - полярну систему координат (фіг.4), що є більш зручною для природної круглої апертури ока. Використання тієї чи іншої системи координат для запропонованого способу впливатиме лише на порядок обчислення апроксимаційних функцій. Фіг.5 ілюструє співвідношення між виміряним значенням dф зміщення проекції лазерного пучка в субапертурі (спосіб з сенсором Гартмана-Шека), або у повній апертурі (спосіб рейтрейсингу). Нахил хвильового фронту можна характеризувати кутом a або одиничним вектором n, нормальним до поверхні хвильового фронту. Кут a визначається із співвідношення для трикутника ODO': O' D tg a = OO' де Ο'D=dф - виміряна величина зміщення проекції лазерного променя в площині фотоприймача, a OO'=F - фокусна відстань об'єктива. З цього виразу одержуємо: dф a = arctg F . Послідовність операцій при вимірюванні хвильових аберацій проілюстрована на фіг.6. В цю послідовність входять: (а) зондування ока лазерним пучком; (б) прийом розсіяного сітківкою випромінювання; (в) вимірювання нахилу хвильового фронту у дискретному наборі точок зіниці; (г) апроксимація хвильового фронту функціями від координат зіниці; (д) обчислення хвильових аберацій. У способі-прототипі для апроксимації хвильового фронту використовують ряди, що складаються з поліномів Церніке. Задачу розв'язують за допомогою методу найменших квадратів. Цю процедуру графічно проілюстровано на фіг.7 та 8. На фіг.7 подана траєкторія сканування уздовж кільцевої траєкторії, тобто траєкторії постійного радіуса r. На цій траєкторії є фіксовані точки з відомими координатами (r, j1), (r, j2), ..., (r, jі), ..., (r, jN), в яких здійснюються вимірювання величини dф . На фіг.8 подана діаграма значень dф для точок від j 1 до jN. Тут відображено модуль цієї величини, в аналітичному ж запису розглядаються його ортогональні компоненти. Пунктиром на фіг.8 подано неперервну функцію (поліноміальний ряд), що за методом найменших квадратів апроксимує траєкторію проекції променя на фотоприймачі (для способу рейтрейсингу). Як бачимо, апроксимуюча функція приймає, як правило, значення, що відрізняються від виміряних. Це є одним з джерел похибки вимірювань. Іншим джерелом є використання поліномів Церніке, що в результаті призводить, крім того, ще й до нерівномірної роздільної здатності описування рефракційних неоднорідностей по апертурі ока, причому в центральній зоні просторова роздільна здатність вимірювань нижча, ніж в периферійній зоні, що знижує цінність одержуваної інформації про аберації ока, оскільки саме центральна зона має найбільше значення для гостроти зору. Підвищення просторової роздільної здатності можна досягти за рахунок збільшення числа точок вимірювання, що дозволить збільшити число апроксимуючих членів ряду. Це, звичайно, ускладнить вимірювання й збільшить дозу опромінення сітківки, ускладниться й подовжиться процес обчислень через необхідність збільшення кількості рівнянь. Запропонований спосіб використовує сплайнову апроксимацію, при якій траєкторія проекції променя на сітківці апроксимуватиметься не за критерієм найменших квадратів (пунктирна траєкторія фіг.9), а проходитиме безпосередньо через виміряні значення відхилення променя для точок зондування з координатами (r, j1), (r, j2), ..., (r, jі), ..., (r, jN). На фіг.10 та 11 наведено приклади траєкторій проекції променя на сітківку (діаграми перетину сітківки), апроксимованих за одними й тями ж даними вимірювань: на фіг.10 - за методом найменших квадратів, на фіг.11 - за допомогою сплайнів. Очевидно, що згладжування апроксимованих траєкторій на фіг.10 є значно більшим, ніж на фіг.11, що свідчить про втрату значної частки інформації про варіації рефракційних неоднорідностей, які містять вищі просторові частоти. Запропонований спосіб вимірювання хвильових аберацій ока відрізняється від прототипу тим, що (як показано на фіг.12) в ньому у процедури, зображені на фіг.6, внесено особливості, що складають суть запропонованого способу. Розглянемо ці особливості в порядку використання операцій з посиланнями на відповідні пункти формули винаходу. При вимірюванні нахилу хвильового фронту у дискретному наборі точок зіниці цей набір точок формують або уздовж концентричних кілець (як це передбачено п. 2 формули винаходу), або паралельно до однієї з осей прямокутної системи координат (п. 4 формули винаходу). Апроксимація хвильового фронту функціями від координат зіниці має такі особливості: (а) Визначення часткових похідних у будь якій точці зіниці виконують шляхом сплайнової апроксимації (п. 1 формули винаходу). Згідно з п. 6 формули винаходу ця апроксимація виконується за співвідношенням, в якому інтерполяційний кубічний сплайн S(x) по узагальненій координаті x одержують за даними про координати хі, хi+1 і-ої та (і+1)-ої точок зіниці з їх дискретного набору, в яких виконано вимірювання нахилу хвильового фронту, та про значення першої похідної S’(xi), S’(xi+1) в точках xi, xi+1 . При цьому повинна виконуватись умова забезпечення неперервності другої по хідної S’’(x) в цих точках. (б) Хвильовий фронт реконструюють шляхом чисельного інтегрування уздовж радіусів з початковою точкою інтегрування у центрі зіниці (п. 1 формули винаходу). П ункт 7 формули винаходу уточнює це математичним співвідношенням для хвильового фронту W(Ρ,Φ) в довільній точці зіниці через відомі ¶W (r, Ф ) ¶r значення похідних вполярній системі координат (r,j). При цьому відрізок інтегрування [0,Ρ] ¶W (r, Ф ) dr ¶r 0 Р , розбивають на N часткових відрізків [r i-1, r i] так що i = 1 N а інтеграл ò замінюють сумою ær +r ö ¶W ç i -1 i , Ф ÷ N 2 ø (r - r ) å è ¶r i i-1 i= 1 (в) Апроксимацію часткових похідних виконують спочатку уздовж кожного кільця, а потім уздовж радіусів (п. 3 формули винаходу). В іншій реалізації способу апроксимацію виконують уздовж кожної з паралельних прямих, а потім - в ортогональних напрямах (п. 5 формули винаходу). В обчислення хвильових аберацій також внесено суттєву особливість: хвильові аберації, наприклад, у вигляді ряду із поліномів Церніке тепер обчислюються не за обмеженою кількістю даних, що включають лише точки, в яких виконано вимірювання, а за неперервними функціями. За таких умов обчислення довільного числа членів ряду Церніке не потребує збільшення числа точок вимірювання, оскільки поверхня хвильового фронту описується сплайнами, що відповідають умовам неперервності. Функціональна схема пристрою для вимірювання хвильових аберацій ока за запропонованим способом наведена на фіг.13. До її складу входять: канал зондування 1, приймальний канал 2, канал обробки та відображення інформації 3, канал орієнтування ока пацієнта 4, а також поляризаційний розділювач 5, встановлений на виході каналу зондування 1, та перший світлоподілювач 6, встановлений перед входами приймального каналу 2 та каналу орієнтування ока пацієнта 4. Досліджуване око 7 має рогівку 8, кришталик 9 та сітківку 10. Канал зондування 1 складається з встановлених послідовно лазера 11 та блока позиціонування пучка 12. Приймальний канал 2 містить в собі послідовно встановлені оптичний блок 13 та фотоприймач 14. Канал обробки та відображення інформації 3 складається з блока сплайнової апроксимації 15, блока реконструювання хвильвого фронту 16, блока обчислення хвильових аберацій 17, блока відображення інформації 18 та блока координатних даних 19. Своїм входом блок сплайнової апроксимації 15 зв'язаний з виходом фотоприймача 14. Блоки 15, 16, 17 та 18 з'єднані так, що вхід кожного наступного з них підключено до виходу попереднього. Блок координатних даних 19 своїм виходом зв'язаний з блоком позиціонування пучка 12 та входом блока сплайнової апроксимації 15. Канал орієнтування ока пацієнта 4 складається із другого світлоподілювача 20, телевізійної камери 21, джерела світла 22 та акомодаційного транспаранта 23, причому елементи 22, 23 встановлені послідовно, а випромінювання джерела світла спрямовано на око пацієнта так, що воно віддзеркалюється двічі: другим світлоподілювачем 20 і першим світлоподілювачем 6, та проходить через поляризаційний розділювач 5. Функціонування пристрою. Перед вимірюванням око пацієнта 7 орієнтують так, щоб його лінія зору співпадала з оптичною віссю пристрою. Для цього погляд пацієнта спрямовують на джерело світла 22, що складається з власне джерела світла, яким може бути, наприклад, світлодіод, та з оптичної формуючої системи, за допомогою якої акомодаційний транспарант 23 може бути спряжений з сітківкою ока в широкому діапазоні відстаней (для спрощення на фіг.13 ці елементи не показані). Телевізійна система 21 дозволяє візуалізувати процес орієнтування. Цей процес є важливим для одержання коректних результатів вимірювання, але він не є суттєвим з точки зору особливостей запропонованого способу. В момент, коли око пацієнта коректно зорієнтовано та акомодовано на задану відстань, включають лазер 11. Його випромінювання покроково зміщується по зіниці, як зображено на фіг.2 та 4. Після проходження через заломлюючі поверхні та структури ока 7 це випромінювання попадає на сітківку 10. Випромінювання лазера 11 лінійно поляризоване. В результаті розсіяння на структурах сітківки це випромінювання деполяризується, і лише крос-компонента проходить через поляризаційний розділювач 5 у зворотному напрямі на приймальний канал 2. Та частина лазерного випромінювання, що віддзеркалюється поверхнею рогівки 8, через поляризаційний розділювач 5 не проходить (як відомо, при віддзеркаленні лінійна поляризація випромінювання не змінюється). Завдяки цьому на фотоприймач 14 попадає тільки крос-компонента випромінювання, розсіяного сітківкою 10. За допомогою оптичного блока 13 спрягають площину сітківки 10 та площину фотоприймача 14. Виміряні значення відхилень dф (фіг.2 та 5) подаються в блок сплайнової апроксимації 15. По суті, блок координатних даних 19 є драйвером блока позиціонування пучка 12, який управляє просторовим положенням лазерного пучка, що входить в око паралельно до оптичної осі пристрою. Крім того, з блока координатних даних 19 до блока сплайнової апроксимації 15 надходить інформація про координати точки зіниці, в якій в даний момент виконується вимірювання нахилу хвильового фронту (перших частинних похідних). За допомогою цього блока знаходять функції від зіничних координат, які апроксимують значення перших частинних похідних (однозначно визначених через відхилення dф ) у будь якій точці зіниці. Блок реконструювання хвильового фронту 16 виконує свою функцію шляхом чисельного інтегрування уздовж радіусів з початковою точкою інтегрування в центрі зіниці, де для всіх радіусів початкове значення інтеграла задають однаковим. Блок обчислення хвильових аберацій 17 аналізує відхилення хвильового фронту від ідеальної форми, і карта (двохвимірний розподіл) цих відхилень візуалізується блоком відображення інформації 18. Розглянута нами структура пристрою та взаємодія його основних елементів мала за приклад рейтрейсинговий спосіб. Структура ж пристрою за способом, що використовує поділ випромінювання, яке виходить з ока, на субапертури, була б в основному такою ж, за виключенням того, що оптичному блокові 13 слід надати функції сенсора Гартмана-Шека. Блок позиціонування пучка 12 у цьому випадку виконуватиме лише функції формування пучка, а інформація про координати субапертури для блока координатних даних 19 має формуватись зовні від нього в приймальному каналі 2. За допомогою описаного пристрою реалізуються також всі його модифікації, задекларовані залежними пунктами формули винаходу. Так, блок позиціонування пучка 12 виконує функцію розташування дискретного набору точок, в яких виконують вимірювання нахилу хвильового фронту, уздовж концентричних кілець (див. фіг.4) зі спільним центром, який співпадає з центром координат (п. 2 формули винаходу). При цьому сплайнову апроксимацію часткових похідних за допомогою блока 15 виконують спочатку уздовж кожного кільця, а потім - уздовж радіусів (п. 3 формули винаходу). При реалізації ж запропонованого способу з сенсором Гартмана-Шека дискретний набір точок, в яких вимірюють нахил хвильового фронту, розташовують уздовж прямих (див. фі г.3), паралельних одній з осей прямокутної системи координат. Таке розташування зазвичай відповідає структурі матричного растру оптичного блока 13. При такій структурі набору точок блок сплайнової апроксимації 15 буде виконувати апроксимацію частинних похідних спочатку уздовж кожної з паралельних прямих, а потім - в ортогональних напрямах (п. 5 формули винаходу). Слід наголосити, що прямолінійну структур у набору точок можна реалізувати також і при рейтрейсинговому способі, але більш раціональною для нього є кільцева структура. За допомогою блока 15 виконується також сплайнова апроксимація по кожній з координат за формулою: (xi+1 - x )2 [2(x - xi ) + (xi +1 - xi )] S(x ) + (x - xi )2 [2(xi+1 - x) + (x i+1 - x i )] S(x ) + i i +1 (xi +1 - xi )3 (x i+1 - xi )3 (x - x)2 (x - xi ) S' (x ) + (x - xi )2 (x - xi +1) S' (x ) + i+1 i i +1 (x i+1 - x1 )2 (x i+1 - x i )2 , S(x ) = де S(x) є інтерполяційним кубічним сплайном по узагальненій координаті х; хі. хі+1 є координатами і-ої та (і+1)-ої точок зіниці з їх дискретного набору, в яких виконано вимірювання нахилу хвильового фронту з відповідними значеннями S(хi), S(xi+1); a S’(хi), S’(xi+1) є значеннями першоїпохідної в точках хі. хі+1, що забезпечують неперервність другої похідної S’’(x) в цих точках (п. 6 формули винаходу). Реконструювання хвильового фронту за допомогою блока 16 виконують шляхом інтегрування за формулою: ¶W (r, Ф) dr ¶r 0 Р W (Р, Ф ) = W (0, Ф ) + ò , де W(r,j) є функцією хвильового фронту, r - координатою по радіусу, j - координатою по куту, (Р,Ф) є координатами довільної точки зіниці, в центрі зіниці W(0, j) покладають рівним нулю, а інтегрування виконують чисельно за формулою: ær +r ö ¶W ç i-1 i , Ф ÷ Р N ¶W (r, Ф ) 2 è ø (r - r ) ò ¶r dr » å i i-1 ¶r i=1 0 , , причому відрізок [0,Р] розбивають на N часткових відрізків [r і-1, r і] так, що i = 1 N (п. 7 формули винаходу). Нарешті, блок обчислення хвильових аберацій 17 може обчислювати хвильові аберації не за даними обмеженої кількості точок зіниці, в яких вимірюються нахили хвильового фронту, а за даними реконструйованого у вигляді сплайнів хвильового фронту. Завдяки цьому немає потреби у збільшенні числа точок зондування, а значить, і у збільшенні експозиції опромінення ока пацієнта, що є незаперечною перевагою запропонованого способу наряду з підвищенням просторової роздільної здатності вимірювання хвильових аберацій. На фіг.14 наведено приклад конструктивного виконання каналів 1, 2 та 4 пристрою, що реалізує запропонований спосіб. Всі елементи перелічених каналів змонтовані на жорсткій основі, закріпленій на рухомому базовому вузлі Б щілинної лампи. Пацієнта розміщують з правого боку конструкції, що має фіксаційні обмежувачі П та Л, до яких пацієнт притискається підборідком та лобом. Конструкція має три степені свободи: вверх-вниз, вліво-вправо та в глибину. Цими зміщеннями та поворотами голови пацієнта добиваються співпадіння оптичної осі пристрою та зорової осі досліджуваного ока, після чого виконують вимірювання. Тривалість повного циклу зондування ока у повному наборі точок зондування складає декілька десятків мілісекунд. Зовнішній вигляд пристрою проілюстровано фіг.15. Окрім конструкції на базі щілинної лампи (фіг.14) пристрій містить також канал обробки та відображення інформації на базі персонального комп'ютера. На екрані дисплея може відображатись не тільки карта хвильового фронту, а й інша допоміжна інформація, яка може бути суміщена також з вихідною інформацією телевізійної системи 21 (або накладена на неї). Інформація про аберації хвильового фронту може бути перетворена в більш наочну інформацію про рефракційні похибки. Приклади подання такої інформації у вигляді двохвимірних карт, кодованих кольором, приведені на фіг.16 та 17. На фіг.16 ця карта побудована як результат апроксимації хвильового фронту поліноміальним рядом Церніке за методом найменших квадратів, а на фіг.17 - карта за тими ж первинними даними вимірювань, але як результат сплайнової апроксимації. З порівняння цих карт видно, що в першому випадку втрачена дуже важлива інформація про кератоконус, який добре видно на фіг.17 в лівому нижньому квадраті. Цей приклад доводить безсумнівні переваги використання запропонованого способу вимірювання хвильових аберацій ока.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measuring wave aberrations of eyes
Назва патенту російськоюМетод измерений волновых аберраций глаза
МПК / Мітки
МПК: A61B 3/14, A61B 3/00, A61B 3/10
Мітки: хвильових, аберацій, вимірювання, спосіб, ока
Код посилання
<a href="https://ua.patents.su/13-67870-sposib-vimiryuvannya-khvilovikh-aberacijj-oka.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання хвильових аберацій ока</a>
Спосіб вимірювання хвильових аберацій ока та пристрій для його здійснення (варіанти)
Номер патенту: 59488
Опубліковано: 15.09.2003
Автор: Молебний Василь Васильович
МПК: A61B 3/14, A61B 3/10, A61B 3/00
Мітки: ока, вимірювання, здійснення, спосіб, варіанти, пристрій, аберацій, хвильових
Формула / Реферат:
1. Спосіб вимірювання хвильових аберацій ока, оснований на зондуванні ока вузьким пучком лазерного випромінювання, виділенні розсіяної сітківкою компоненти з випромінювання, що повертається з ока, розділенні її на субапертури за допомогою матриці співвісних лінз, вимірюванні нахилу хвильового фронту в кожній субапертурі шляхом визначення відхилення положення фокальної плями від оптичної осі лінзи, реконструкції хвильового фронту за виміряними...
Пристрій для вимірювання рефракційних аберацій ока
Номер патенту: 66936
Опубліковано: 15.06.2004
Автори: Ільченко Леонід Миколайович, Молебний Василь Васильович, Ластер Ламар Фредерік (молодший), Колєнов Сергій Олександрович, Смірнов Євгеній Миколайович
МПК: A61B 3/10, A61B 3/00, A61B 3/14
Мітки: аберацій, рефракційних, пристрій, ока, вимірювання
Формула / Реферат:
1. Пристрій для вимірювання рефракційних аберацій ока, що має в своєму складі канал зондування, вимірювальний канал та канал нормування, причому канал зондування складається з послідовно встановлених: лазера, першого та другого дифракційних однокоординатних дефлекторів, селектора першого порядку дифракції та колімаційної лінзи, причому селектор першого порядку дифракції виконано у вигляді телескопа за схемою Кеплера з апертурною діафрагмою,...
Спосіб діагностики та коригування хвильових характеристик досліджуваних об’єктів та пристрій для його здійснення
Номер патенту: 34389
Опубліковано: 15.02.2001
Автори: Закіров Салават Мінгазієвич, Оржельський Ігор Володимирович
МПК: A61H 39/00, A61B 5/04, A61B 6/00
Мітки: хвильових, здійснення, коригування, діагностики, пристрій, досліджуваних, характеристик, об'єктів, спосіб
Текст:
...рахунок одного або серії малопомітних, незначних обурень траєкторії аттрактора. Кожне з цих обурень лише злегка змінює траєкторію. Але через визначений час нагромадження і експоненційне посилення малих обурень призводить до достатньо сильної корекції траєкторії. Таким чином, системи з хаосом демонструють одночасно і гарну керованість і надзвичайну пластичність: система чуйно реагує на зовнішні обурення, при цьому зберігаючи тип руху....
Спосіб ультразвукового вимірювання параметрів руху і пристрій для його реалізації
Номер патенту: 67829
Опубліковано: 15.07.2004
Автори: МАРУСЕНКО АНАТОЛІЙ ІЛАРІОНОВИЧ, БАРАННИК ЄВГЕН ОЛЕКСАНДРОВИЧ, Волохов Володимир Олексійович, Гірник Сергій Арнольдович
МПК: A61B 8/00
Мітки: ультразвукового, пристрій, реалізації, руху, вимірювання, спосіб, параметрів
Формула / Реферат:
1. Спосіб ультразвукового імпульсного вимірювання параметрів руху суцільних середовищ, який містить задання напрямку зондування досліджуваного середовища, періодичне випромінювання вздовж заданого напрямку зондування послідовності зондуючих ультразвукових хвильових імпульсів, прийом ультразвукових хвиль, відбитих від досліджуваного середовища, перетворення відбитих ультразвукових хвиль в електричний сигнал відгуку, його підсилення,...
Спосiб сарчука в.м. фiксування електромагнiтних хвильових характеристик об’єктiв, що тестуються
Номер патенту: 601
Опубліковано: 15.12.1993
Автор: Сарчук Віктор Миколайович
МПК: A61H 39/00
Мітки: спосіб, електромагнітних, в.м, об'єктів, сарчука, тестуються, хвильових, характеристик, фіксування
Формула / Реферат:
1 .Способ фиксации электромагнитных волновых характеристик тестируемых объектов путем взаимодействия тестируемого объекта и носителя информации, отличающийся тем, что, с целью повышения точности записи волновых характеристик при этиологической диагностике заболеваний, вещество — носитель информации расплавляют, заливают в металлическую емкость и устанавливают ее вместе с тестируемым объектом на металлическую пластину.2. Способ по...