Пошуково-вимірювальний загоризонтний пеленгатор рухомих випромінюючих об’єктів
Номер патенту: 75745
Опубліковано: 15.05.2006
Автори: Остапов Анатолій Олександрович, Чигирин Олег Трохимович



Формула / Реферат
Пошуково-вимірювальний загоризонтний пеленгатор рухомих випромінюючих об'єктів, що складається із вимірювальної антени, приводу антени, першого приймача, блока визначення кутових координат, пристрою індикації, формувача керуючих сигналів, у якому вихід першого приймача приєднаний до першого входу блока визначення кутових координат, перший вхід вимірювальної антени з’єднаний з виходом приводу антени, другий вихід вимірювальної антени приєднаний до другого входу блока визначення кутових координат, вихід якого приєднаний до першого входу пристрою індикації, виходи формувача керуючих сигналів з'єднані з відповідними входами вимірювальної антени та входами блока визначення кутових координат, причому перший вхід та перший вихід пошуково-вимірювального пеленгатора рухомих випромінюючих об'єктів приєднані відповідно до другого входу вимірювальної антени та першого входу пристрою індикації, який відрізняється тим, що додатково містить пошукову антену, перемикач, подільник потужності, другий приймач, блок визначення сектора випромінювання, тригер, формувач сигналу помилки, датчик кута ![]() , датчик кута
, датчик кута ![]() , перший та другий блоки І, перший та другий блоки НІ, формувач режимів роботи, причому перші виходи вимірювальної і пошукової антен приєднані відповідно до першого і другого входів перемикача, третій і четвертий входи якого приєднані відповідно до виходів першого блока НІ і першого блока І, вихід перемикача приєднаний відповідно через подільник потужності та другий блок І до входу першого приймача, а через подільник потужності, другий блок НІ, другий приймач - до першого входу блока визначення сектора випромінювання, перший і другий входи вимірювальної антени приєднані відповідно до першого і другого входів пошукової антени, другий вихід якої з’єднаний з другим входом блока визначення сектора випромінювання і першим входом формувача сигналу помилки, вихід якого та другий, третій, четвертий, п'ятий його входи відповідно приєднані до входу приводу антени, виходу датчика кута
, перший та другий блоки І, перший та другий блоки НІ, формувач режимів роботи, причому перші виходи вимірювальної і пошукової антен приєднані відповідно до першого і другого входів перемикача, третій і четвертий входи якого приєднані відповідно до виходів першого блока НІ і першого блока І, вихід перемикача приєднаний відповідно через подільник потужності та другий блок І до входу першого приймача, а через подільник потужності, другий блок НІ, другий приймач - до першого входу блока визначення сектора випромінювання, перший і другий входи вимірювальної антени приєднані відповідно до першого і другого входів пошукової антени, другий вихід якої з’єднаний з другим входом блока визначення сектора випромінювання і першим входом формувача сигналу помилки, вихід якого та другий, третій, четвертий, п'ятий його входи відповідно приєднані до входу приводу антени, виходу датчика кута ![]() , виходу датчика кута
, виходу датчика кута ![]() , одиничного виходу тригера, першого виходу блока визначення сектора випромінювання, другий і третій виходи якого приєднані відповідно до другого входу пристрою індикації і одиничного входу тригера, одиничний вихід якого з'єднаний з керуючими входами першого та другого блоків НІ, першого та другого блоків І, вихід формувача режимів приєднаний до перших входів першого блока НІ і першого блока І, виходи формувача керуючих сигналів приєднані до входів, відповідно, пошукової антени, блока визначення сектора випромінювання, формувача сигналу помилки, датчика кута
, одиничного виходу тригера, першого виходу блока визначення сектора випромінювання, другий і третій виходи якого приєднані відповідно до другого входу пристрою індикації і одиничного входу тригера, одиничний вихід якого з'єднаний з керуючими входами першого та другого блоків НІ, першого та другого блоків І, вихід формувача режимів приєднаний до перших входів першого блока НІ і першого блока І, виходи формувача керуючих сигналів приєднані до входів, відповідно, пошукової антени, блока визначення сектора випромінювання, формувача сигналу помилки, датчика кута ![]() , датчика кута
, датчика кута ![]() , другий вхід пристрою індикації приєднаний до другого виходу пошуково-вимірювального пеленгатора.
, другий вхід пристрою індикації приєднаний до другого виходу пошуково-вимірювального пеленгатора.
Текст
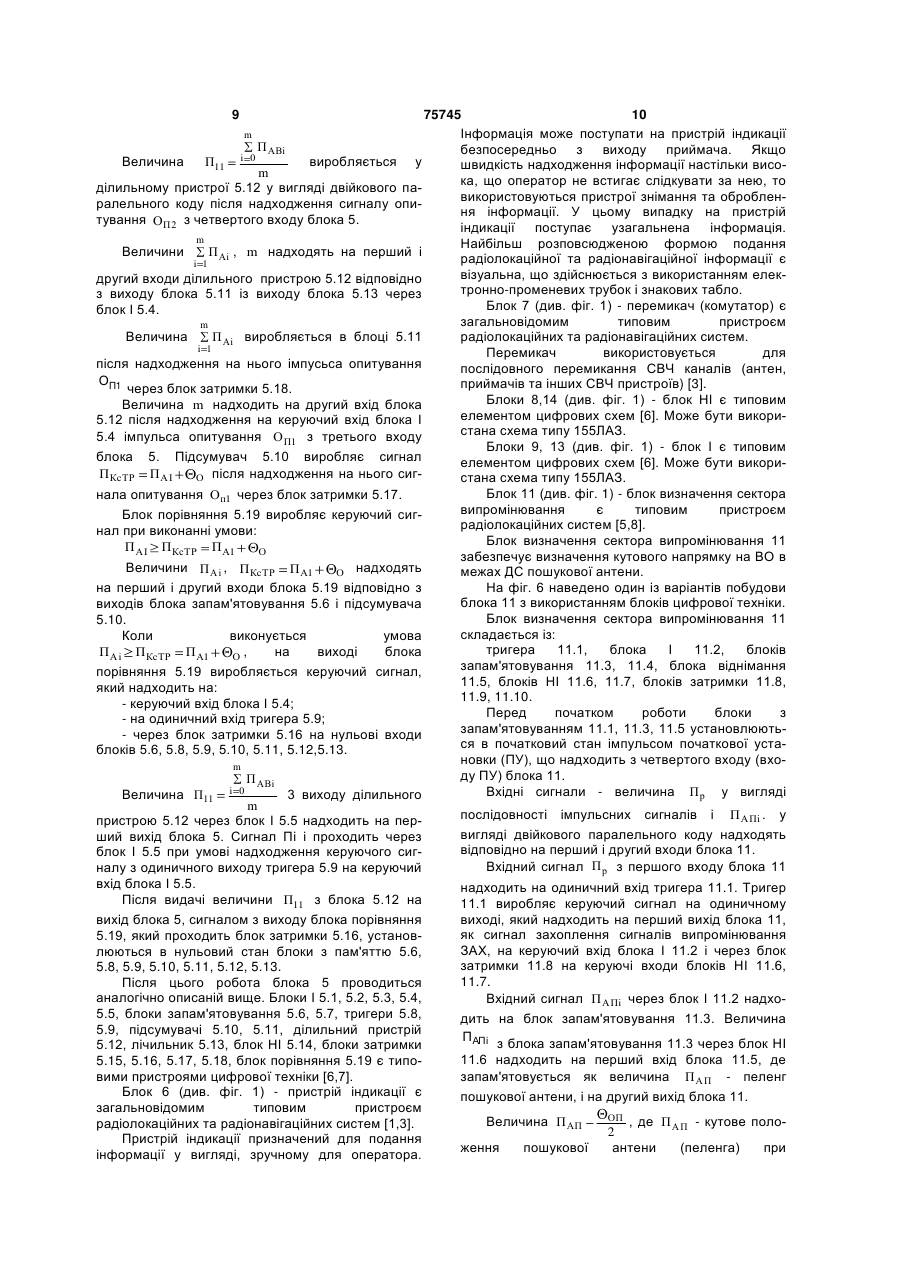
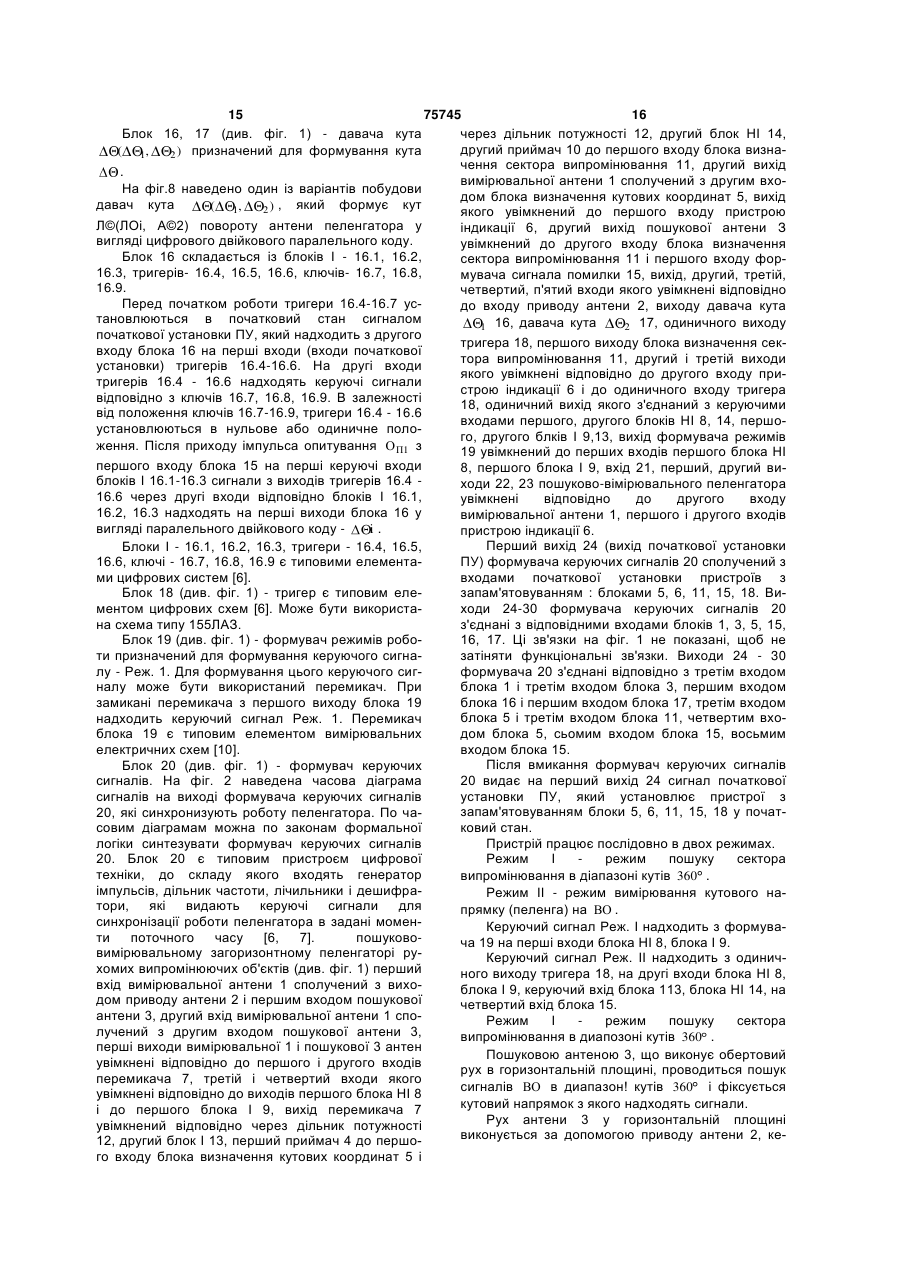
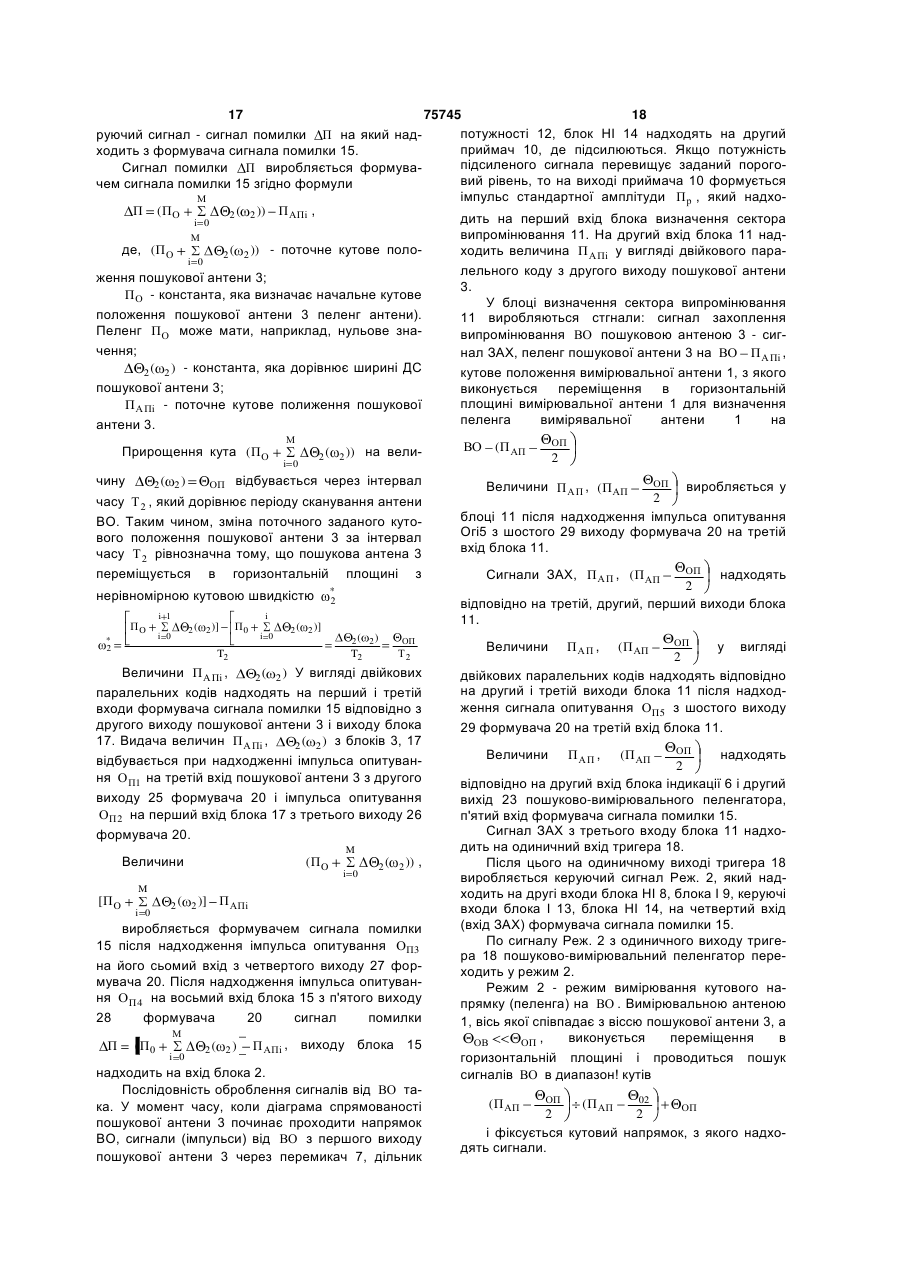
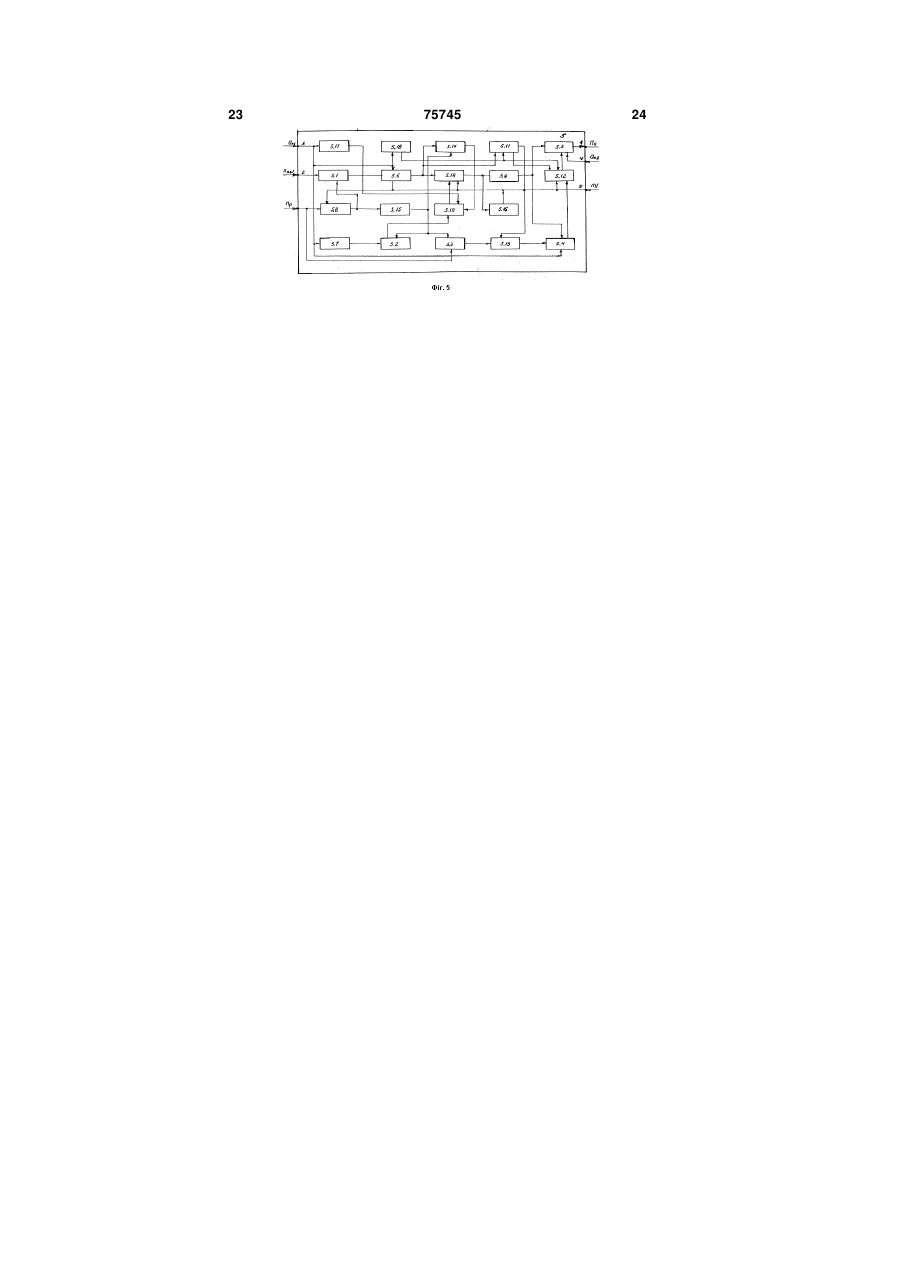
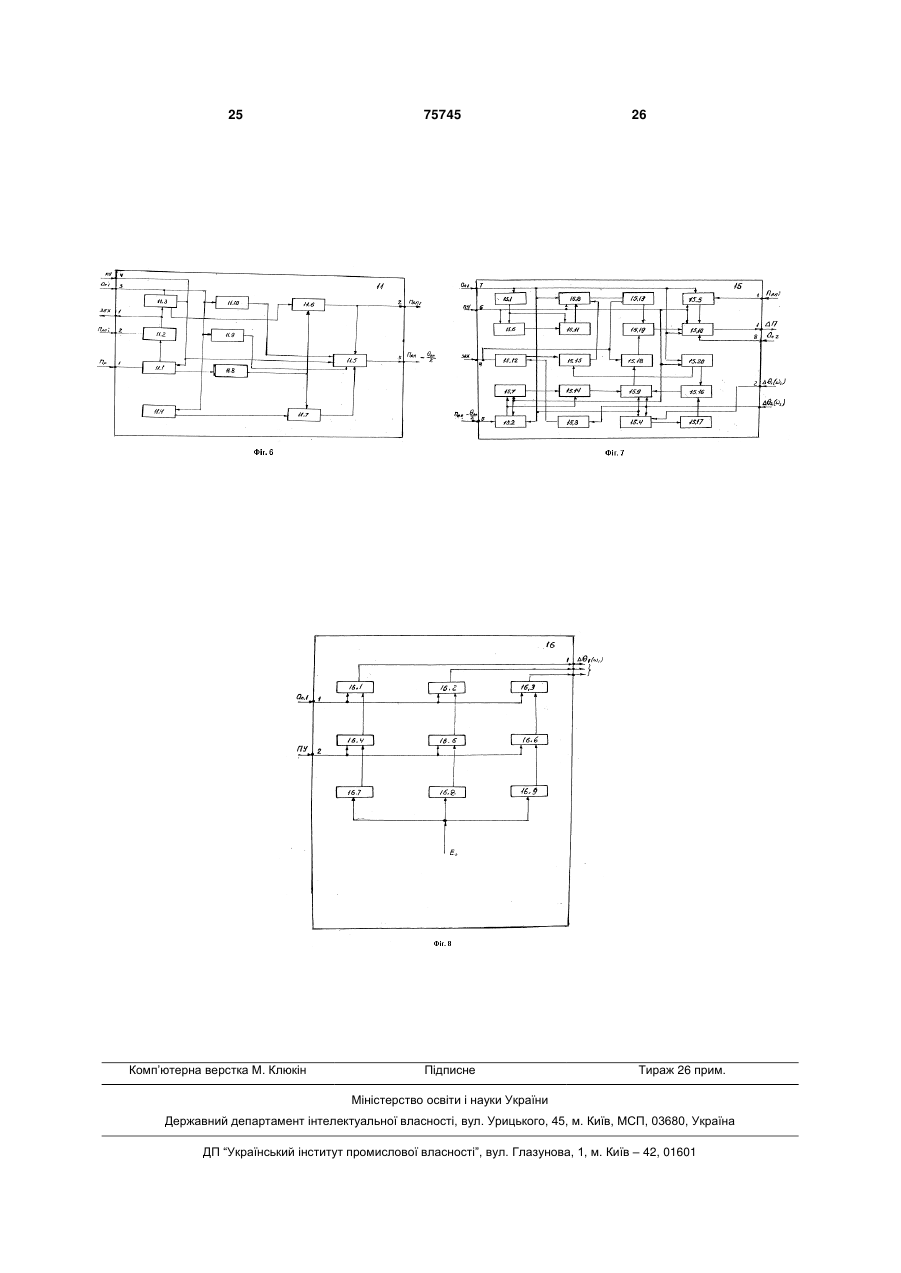
Пошуково-вимірювальний загоризонтний пеленгатор рухомих випромінюючих об'єктів, що складається із вимірювальної антени, приводу антени, першого приймача, блока визначення кутових координат, пристрою індикації, формувача керуючих сигналів, у якому вихід першого приймача приєднаний до першого входу блока визначення кутових координат, перший вхід вимірювальної антени з’єднаний з виходом приводу антени, другий вихід вимірювальної антени приєднаний до другого входу блока визначення кутових координат, вихід якого приєднаний до першого входу пристрою індикації, виходи формувача керуючих сигналів з'єднані з відповідними входами вимірювальної антени та входами блока визначення кутових координат, причому перший вхід та перший вихід пошуково-вимірювального пеленгатора рухомих випромінюючих об'єктів приєднані відповідно до другого входу вимірювальної антени та першого входу пристрою індикації, який відрізняється тим, що додатково містить пошукову антену, перемикач, подільник потужності, другий приймач, блок визначення сектора випромінювання, тригер, формувач сигналу помилки, датчик кута 1 , датчик кута 2 , перший та другий C2 2 UA 1 3 75745 4 360° і точністю визначення кутового напрямку (пени пеленгатора; ленга) на ВО . Т 0 - час одного сканування антени ВО. В УКВ, дециметровому, сантиметровому Час перехвату сигналів ВО визначається діапазонах пеленгування випромінювань ВО згідно формули: (РЛС) ускладнюється тим, що в цих діапазонах Т , (2) ПЕР використовуються вузькі діаграми спрямованості 1 ВО (ДС) антен (РЛС) ( во 1 4 , де де - кут сектора сканування антени в ширина ВО ДС антен ВО ). Тому кутова швидкість пошуку напрямку на ВО (кутова швидкість со обертання ДС антен пеленгаторів) повинна бути узгоджена з передбаченою кутовою швидкістю обертання антени ВО (РЛС). Особливо утруднено визначення пеленга на працюючу в режимі кругового обертання РЛС. Якщо приймач пеленгатора настроєно на частоту РЛС і потрібно визначити тільки пеленг РЛС, то необхідно, щоб за час одного обертання антени РЛС, ДС антени пеленгатора повернулась на кут, який не переверщує О , де О ширина ДС пеленгатора [1]. Пристрій, який забезпечує реалізацію цих умов, наведених у [1], складається з антени, приводу антени, приймача, блока визначення кутових координат, пристрою індикації. За прототип вибирається апаратура веденого приймального пункту "Пристрою для визначення координат рухомого випромінюючого об'єкта" [2]. Пристрій прототипу складається з антени, приводу антени, давача сканування антени, приймача, блока визначення кутових координат, пристрою індикації, блока запам'ятовування, формувача керуючих сигналів, в якому перший вихід антени через приймач увімкнений до першого входу блока визначення кутових координат, другий вихід антени увімкнений до першого входу давача сканування антени і до другого входу блока визначення кутових координат, третій вхід, четвертий, перший, другий виходи якого увімкнені відповідно до другого виходу та другого входу давача сканування антени, до першого та другого входів пристрою індикації, третій вхід якого увімкнений до третього входу давача сканування антени та виходу блока запам'ятовування, виходи формувача керуючих сигналів з'єднані з відповідними входами антени, давача сканування антени, блока визначення кутових координат, блока запам'ятовування і пристрою індикації, при чому перший і другий входи, перший і другий виходи веденого приймального пункту увімкнені відповідно до першого входу блока запам'ятовування, другого входу антени, другого і третього виходів блока визначення кутових координат. Недоліком пристрою прототипа є великі часові затрати на перехват сигналів ВО в діапазоні кутів 360 . У пристрої прототипа кутова швидкість антени сої вибирається з умови забезпечення достовірного прийому сигналів від головного пелюстка діаграми спрямованості антени ВО за одне сканування антени згідно формули: 1 де 0 Т0 0 , (1) - ширина діаграми спрямованості анте 360 . горизонтальній площині: 0 При вузьких ДС антени пеленгатора ( 0 1 5 ) і малих величинах Т0 5 10с час перехвату ТПЕР пеленгатором випромінювань ВО в діапазоні кутів 360 досягає значних велечин (6-25 хвилин). Метою винаходу, що пропонується, є значне зменшення часу перехвату ТПЕР випромінювань ВО в діапазоні кутів 360 . Поставлена мета досягається тим, що в пошуково-вимірювальний пеленгатор рухомих випромінюючих об'єктів, що складається із вимірювальної антени, приводу антени, першого приймача, блока визначення кутових координат, пристрою індикації, формувача керуючих сигналів, в якому вихід першого приймача увімкнений до першого входу блока визначення кутових координат, перший вхід вимірювальної антени сполучений з виходом приводу антени, другий вихід вимірювальної антени увімкнений до другого входу блока визначення кутових координат, вихід якого увімкнений до першого входу пристрою індикації, виходи формувача керуючих сигналів з'єднані з відповідними входами вимірювальної антени, блока визначення кутових координат, причому перший вхід, перший вихід пошукововимірювального пеленгатора рухомих випромінюючих об'єктів увімкнені відповідно до другого входу вимірювальної антени, першого входу пристрою індикації, який відрізняється тим, що введені пошукова антена, перемикач, дільник потужності, другий приймач, блок визначення сектора випромінювання, тригер, формувач сигнала помилки, давач кута 1 , давач кута 2 , перший, другий блоки І, перший, другий блоки НІ, формувач режимів роботи, в якому перші виходи вимірювальної і пошукової антен увімкнені відповідно до першого і другого входів перемикача, третій і четвертий входи якого увімкнені відповідно до виходів першого блока НІ і першого блока І, вихід перемикача увімкнений відповідно через дільник потужності, другий блок І до входу першого приймача і через дільник потужности, другий блок НІ, другий приймач до першого входу блока визначення сектора випромінювання, перший і другий входи вимірювальної антени увімкнені відповідно до першого і другого входів пошукової антени, другий вихід якої сполучений з другим входом блока визначення сектора випромінювання і першим входом формувача сигнала помилки, вихід другий, третій, четвертий, п'ятий входи якого відповідно увімкнені до входу приводу антени, виходу давача кута 1 , виходу давача кута 2 , одиничного виходу тригера, першого виходу блока визначення сектора випромінювання, другий і третій виходи якого 5 75745 6 увімкнені до другого входу пристрою індикації і нерівномірна кутова швидкість * для обертання 2 одиничного входу тригера, одиничний вихід якого пошукової антени в діапазоні кутів 360 . з'єднаний з керуючими входами першого, другого Для визначення сектора випромінювання в блоків НІ, першого, другого блоків І, вихід формугоризонтальній площині за менший час у пошуковача режимів увімкнений до перших входів першово-вимірювальний пеленгатор введено : пошукову го блока НІ і першого блока І, виходи формувача антену з широкою ДС ( 0 30 50 ) , другий прийкеруючих сигналів увімкнені до відповідних входів пошукової антени, блока визначення сектора мач, блок визначення сектора випромінювання, випромінювання, формувача сигнала помилки, тригер. давача кута Для обертання пошукової антени з високою 1 , давача кута 2 , другий вхід * пристрою індикації увімкнений до другого виходу кутовою швидкістю 2 порівняно з кутовою пошуково-вимірювального пеленгатора швидкістю 1 , вимірювальної антени введено даЗначне зменшення часу перехвату ТПЕР вач кута 2 , формувач сигнала помилки. випромінювань ВО обумовлено використанням Для забезпечення роботи пошуковопошукової антени з широкою DC ( 0 30 50 ) , вимірювального пеленгатора у наведених режияка обертається з більш високою кутовою мах роботи до його складу введені: перемикач, швидкістю 2 порівняно з кутовою швидкістю 1 дільник потужності, давач кута 1 , формувач вимірювальної антени протопила. режимів, два блока І, два блока НІ. Обертання пошукової антени в діапазоні кутів Використання наведених відмітних ознак зі О 360 може виконуватися двома методами. зв'язками між ними не відомо, тому відповідає Перший метод. Пошукова антена обертається критерію "новизна". з рівномірною кутовою швидкістю 2 Забезпечення запропонованого пристрою новою сокупністю ознак для виконання поставленої 0П , (3) задачі дозволяє стверджувати, що запропонова2 ТО ний пристрій відповідає умовам патентоздатності, де 0П - ширина DC пошукової антени; так як він є новим, має винахідницький рівень та промислове застосування. Сутність винаходу ТО - період обертання антени ВО . пояснюється кресленнями, де: За час t nТО , де n 1,2,3...., пошукова антена фіг. 1 наведена блок-схема загоризонтного на переміщується на кут пошуково-вимірювального пеленгатора рухомих ВО; 1 nТ О 2 n ОП . (4). на фіг. 2 наведена часова діаграма робота t ТО формувача керуючих сигналів; .Другий метод. Пошукова антена обертається на фіг. 3 наведена блок-схема антени 1; нерівномірно. Пошукова антена час t ТО утрина фіг. 4 наведена блок-схема приводу антени мується в заданому напрямку 2; 0 і забезпечує на фіг. 5 наведена блок-схема блока визнаОП прийом сигналів від ВО в куті gi чення кутових координат 5; 0 2 на фіг. 6 наведена блок-схема блока визнаПотім пошукова антена "стрибком" за час чення сектора випромінювання 11; t2 t1 змінює своє кутове положення, яке на фіг. 7 наведена блок-схема формувача сигвідрізняється від попереднього на кут нала помилки 15; ОП на фіг 8 наведена блок-схема давача кута ОП g (i 1) 0 ОП gi ОП 1 16. 2 Пошуково-вимірювальний загоризонтний пеСередня кутова швидкість * визначається 2 ВО , що пропонується, ленгатор рухомих згідно формули: складається (див. фіг. 1) з вимірювальної антени 1, приводу антени 2, пошукової антени 3, першого * on on . (5) 2 приймача 4, блока визначення кутових координат t1 t 2 T0 t 2 5, пристрою індикації 6, перемикача 7, блоків НІ Якщо t 2 TO , то кутова швидкість * 8,14, блоків 19, 13, другого приймача 10, блока 2 2. визначення сектора випромінювання 11, дільника t пошукова антена переміщується на За час потужності 12, формувача сигнала помилки 15, кут давачів кута 1, 2 16,17, тригера 18, формуT0 * (6) nT0 * n on вача режимів 19, формувача керуючих сигналів 20. i 2 T0 t 2 Формувач керуючих сигналів 20 має 7 виходів: і з урахуванням (4) маємо 24-30. Зв'язки формувача керуючих сигналів 20 з T0 блоками пошуково-вимірювального пеленгатора * i i на фіг. 1 не показані для наглядності креслень. T0 t 2 Пошуково-вимірювальний загоризонтний пеЯкщо t 2 (4) мало відрізняється TO , то кут ленгатор має один вхід 21 і два виходи 22, 23. * Блок 1, 3 (див. фіг. 1) - антена є від кута * (6), і таким чином i i . i загальновідомим типовим пристроєм У запропонованому пристрої використовується 7 75745 8 радіолокаційних систем [3, 4]. підсилення СВЧ сигналів, що поступають із антеАнтена 1,3 забезпечує приймання ни. У радіолокаційних та радіонавігаційних електромагнітної енергії від ВО і передачу її на станціях застосовуються приймачі різних типів, у вхід приймача через антенно-фідерний тракт, тому числі супергетеродинні, детекторні, з переміщення діаграми спрямованості (ДС) антени підсиленням на відео частоті та ін. Найбільш розв площині сканування та вимірювання кутового повсюдженими є супергетеродинні приймачі завВО . Характеристики антени забезпенапрямку на дяки їх високій чутливості. чують вимірювання кутового напрямку з Блок 5 (див. фіг. 1) - блок визначення кутових необхідною точністю. В залежності від призначенкоординат є типовим пристроєм радіолокаційних ня системи і частотного діапазону застосовуються та радіонавігаційних систем [5]. антени різних типів: вібраторні, параболічні, Блок визначення кутових координат 5 рупорні й інші [5]. забезпечує для вибраного методу пеленгування Переміщення ДС антени виконується за доповизначення кутового напрямку на ВО за одне промогою електромеханічних чи електронних ходження діаграми спрямованості антени 1 напристроїв. прямку на ВО методом аналізу обвідної діаграми Антена 1,3 установлюється на дво- чи- трикоординатних поворотних колонках, які керують руспрямованості антени по формулі m хом антен по сигналах від систем стеження. П АВі На фіг. 3 наведено один із варіантів антени 1 з П11 i 0 механічним скануванням ДС антени в одній m площині. де ПАВі до - поточне кутове положення Антена 1 складається із антенного дзеркала вимірювальної антени; 1.1, редуктора 1.2, давача кута 1.3, першого оберi 1,2,3...m тового контактного пристрою 1.4, другого обертового контактного пристрою 1.5. На фіг. 5 наведено один із варіантів побудови Блоки 1.1, 1.2, 1.3, 1.4, 1.5 розміщуються на блока 5 з використанням блоків цифрової техніки. антенній колонці, яка на фіг. 3 не показана. Блок визначення кутових координат 5 СВЧ сигнал при опромінюванні антенного складається із: блоків І 5.1, 5.2, 5.3, 5.4, 5.5, блоків дзеркала 1.1 передається через блок 1.4 на перзапам'ятовування 5.6, 5.7, тригерів 5.8, 5.9, ший вихід блока 1. підсумувачів 5.10, 5.11, ділильного пристрою 5.12, Обертання (сканування) антенного дзеркала лічильника 5.13, блока НІ 5.14, блоків затримки 1.1 виконується при допомозі електромеханічного 5.15, 5.16, 5.17, 5.18, блока порівняння 5.19. зв'язку з входу 1 через редуктор 1.2. При цьому Перед початком роботи блоки з одночасно з антенним дзеркалом 1.1 за допомозапам'ятовуванням 5.6, 5.8, 5.9, 5.10, 5.11, 5.12, гою редуктора 1.2 обертається давач кута 1.3. На 5.13 установлюються в нульовий стан імпульсом виході давача кута 1.3 виробляється код кутового початкової установки (ПУ), що надходить з п'ятого входу ПУ блока 5. положення антени ПА на момент часу, коли Вхідні сигнали- величина П р у вигляді імпульс опитування О з третього входу блока 1 П через блок 1.5 поступає на вхід опитування давача кута 1.3. Код ПА з інформаційного виходу давача кута 1.3 через блок 1.5 поступає надругий вихід блока 1. Блок 2 (див. фіг. 1) - привід антени є типовим пристроєм системи стеження [3, 4]. На фіг. 4 наведено один із варіантів побудови приводу антени 2 . Блок 2 складається із підсилювача потужності 2.1, двигуна 2.2, редуктора 2.3. Вхідний сигнал поступає на вхід блока 2, підсилюється в підсилювачі потужності 2.1 і поступає на керівний вхід двигуна 2.2. В залежності від знака сигнала визначається напрямок обертання двигуна 2.2. Обертання двигуна 2.2 через редуктор 2.3 передається на вихід блока 2 у вигляді електромеханічного зв'язку. При зміні знака вхідного сигналу на вході блока 2 змінюється напрямок обертання двигуна 2.2, який передається на вихід блока 2. Підсилювач потужності 2.1, двигун 2.2, редуктор 2.3 є типовими пристроями електромеханічних систем стеження. Блок 4, 10 (див. фіг. 1) - приймач є загальновідомим типовим пристроєм радіолокаційних та радіонавігаційних систем [3]. Приймач призначений для виділення та послідовності імпульсних сигналів і величина П Аі у вигляді двійкового паралельного коду надходять відповідно на перший і другий входи блока 5. Вхідний сигнал П р з першого входу блока 5 надходить на одиничний вхід тригера 5.8 і через перший вхід блока І 5.3 на лічильний вхід лічильника 5.13. Тригер 5.8 виробляє керуючий сигнал на одиничному виході, який надходить на керуючий вхід блока І 5.1 і через блок затримки 5.15 на керуючі входи блока НІ 5.14 і блоків І 5.2, 5.3. Величина m виробляється лічильником 5.13, який підраховує кількість імпульсів імпульсної послідовності, яка надходить з першого входу блока 5. Вхідний сигнал П Аі з другого входу блока 5 через блок І 5.1 надходить на блок запам'ятовування 5.6. Величина m i 1 П Аі виробляється підсумувачем 5.11 по сигналам П Аі , які надходять з виходу блока запам'ятовування 5.6 на вхід блока 5.11. Сигнали П Аі надходять з блока запам'ятовування 5.6 після надходження на нього сигнала опитування ОП1 з третього входу блока 5. 9 75745 10 Інформація може поступати на пристрій індикації П АВі безпосередньо з виходу приймача. Якщо Величина виробляється у П11 i 0 швидкість надходження інформації настільки висоm ка, що оператор не встигає слідкувати за нею, то ділильному пристрої 5.12 у вигляді двійкового павикористовуються пристрої знімання та обробленралельного коду після надходження сигналу опиня інформації. У цьому випадку на пристрій тування ОП2 з четвертого входу блока 5. індикації поступає узагальнена інформація. m Найбільш розповсюдженою формою подання П Аі , m надходять на перший і Величини радіолокаційної та радіонавігаційної інформації є i 1 візуальна, що здійснюється з використанням елекдругий входи ділильного пристрою 5.12 відповідно тронно-променевих трубок і знакових табло. з виходу блока 5.11 із виходу блока 5.13 через Блок 7 (див. фіг. 1) - перемикач (комутатор) є блок І 5.4. загальновідомим типовим пристроєм m П Аі виробляється в блоці 5.11 Величина радіолокаційних та радіонавігаційних систем. i 1 Перемикач використовується для після надходження на нього імпусьса опитування послідовного перемикання СВЧ каналів (антен, ОП1 приймачів та інших СВЧ пристроїв) [3]. через блок затримки 5.18. Блоки 8,14 (див. фіг. 1) - блок НІ є типовим Величина m надходить на другий вхід блока елементом цифрових схем [6]. Може бути викори5.12 після надходження на керуючий вхід блока І стана схема типу 155ЛАЗ. 5.4 імпульса опитування ОП1 з третього входу Блоки 9, 13 (див. фіг. 1) - блок І є типовим блока 5. Підсумувач 5.10 виробляє сигнал елементом цифрових схем [6]. Може бути викориПКсТР ПАІ О після надходження на нього сигстана схема типу 155ЛАЗ. Блок 11 (див. фіг. 1) - блок визначення сектора нала опитування Оп1 через блок затримки 5.17. випромінювання є типовим пристроєм Блок порівняння 5.19 виробляє керуючий сиградіолокаційних систем [5,8]. нал при виконанні умови: Блок визначення сектора випромінювання 11 ПАІ ПКсТР ПА1 О забезпечує визначення кутового напрямку на ВО в Величини П Аі , ПКсТР ПА1 О надходять межах ДС пошукової антени. На фіг. 6 наведено один із варіантів побудови на перший і другий входи блока 5.19 відповідно з блока 11 з використанням блоків цифрової техніки. виходів блока запам'ятовування 5.6 і підсумувача Блок визначення сектора випромінювання 11 5.10. складається із: Коли виконується умова тригера 11.1, блока І 11.2, блоків на виході блока ПАі ПКсТР ПА1 О, запам'ятовування 11.3, 11.4, блока віднімання порівняння 5.19 виробляється керуючий сигнал, 11.5, блоків НІ 11.6, 11.7, блоків затримки 11.8, який надходить на: 11.9, 11.10. - керуючий вхід блока І 5.4; Перед початком роботи блоки з - на одиничний вхід тригера 5.9; запам'ятовуванням 11.1, 11.3, 11.5 установлюють- через блок затримки 5.16 на нульові входи ся в початковий стан імпульсом початкової устаблоків 5.6, 5.8, 5.9, 5.10, 5.11, 5.12,5.13. новки (ПУ), що надходить з четвертого входу (вхоm ду ПУ) блока 11. П АВі i 0 Вхідні сигнали - величина П р у вигляді Величина П11 3 виходу ділильного m послідовності імпульсних сигналів і ПАПі . у пристрою 5.12 через блок І 5.5 надходить на первигляді двійкового паралельного коду надходять ший вихід блока 5. Сигнал Пі і проходить через відповідно на перший і другий входи блока 11. блок І 5.5 при умові надходження керуючого сигВхідний сигнал П р з першого входу блока 11 налу з одиничного виходу тригера 5.9 на керуючий вхід блока І 5.5. надходить на одиничний вхід тригера 11.1. Тригер Після видачі величини П11 з блока 5.12 на 11.1 виробляє керуючий сигнал на одиничному виході, який надходить на перший вихід блока 11, вихід блока 5, сигналом з виходу блока порівняння як сигнал захоплення сигналів випромінювання 5.19, який проходить блок затримки 5.16, установЗАХ, на керуючий вхід блока І 11.2 і через блок люються в нульовий стан блоки з пам'яттю 5.6, затримки 11.8 на керуючі входи блоків НІ 11.6, 5.8, 5.9, 5.10, 5.11, 5.12, 5.13. 11.7. Після цього робота блока 5 проводиться аналогічно описаній вище. Блоки І 5.1, 5.2, 5.3, 5.4, Вхідний сигнал ПАПі через блок І 11.2 надхо5.5, блоки запам'ятовування 5.6, 5.7, тригери 5.8, дить на блок запам'ятовування 11.3. Величина 5.9, підсумувачі 5.10, 5.11, ділильний пристрій ПАПі з блока запам'ятовування 11.3 через блок НІ 5.12, лічильник 5.13, блок НІ 5.14, блоки затримки 11.6 надходить на перший вхід блока 11.5, де 5.15, 5.16, 5.17, 5.18, блок порівняння 5.19 є типозапам'ятовується як величина ПАП - пеленг вими пристроями цифрової техніки [6,7]. Блок 6 (див. фіг. 1) - пристрій індикації є пошукової антени, і на другий вихід блока 11. загальновідомим типовим пристроєм ОП , де П Величина П АП радіолокаційних та радіонавігаційних систем [1,3]. АП - кутове поло2 Пристрій індикації призначений для подання ження пошукової антени (пеленга) при інформації у вигляді, зручному для оператора. m 11 надходженні імпульса П р ; 75745 ОП -константа, яка дорівнює ширині ДС пошукової антени; виробляється в блоці віднімання 11.5 після надходження на його перший і другий входи величин ПАП та ОП 2 . ОП надходить з блока 2 запам'ятовування 11.4 через блок НІ 11.7. П ОП видаються з блоків Величини АП та 2 11.3, 11.4 після надходження на них імпульса опитування ОП1 з третього входу блока 11. Величина Після надходження керуючого сигнала з одиничного виходу тригера 11.1 через блок затримки 11.8 на керуючі входи блоків НІ 11.6, 11.7, забороняється проходження величин ПАП та ОП 2 11.5. 12 на перший і другий входи блока віднімання ОП виробляється у блоці 2 віднімання 11.5 після надходження на нього імпульса опитування Оп1 через блок затримки 11. 9. Величина П АП ОП - з блока 11.5 у вигляді 2 двійкового паралельного коду надходить на другий вихід блок 11 після надходження на блок 11.5 імпульса опитування Оп1 через блок затримки Величина П АП 11.10. Тригер 11.1, блок І 11.2, блоки запам'ятовування 11.3, 11.4, блок віднімання 11.5, блоки НІ 11.6, 11.7, блоки затримкм 11.8, 11.9, 11.10 є типовими пристроями цифрової техніки [6,7]. Блок 12 (див. фіг. 1) - дільник потужності є загальновідомим елементом СВЧ радіотехничних схем. Дільник потужності забезпечує розподіл потужності СВЧ енергії на два або декілька каналів у заданому співвідношенні, наприклад, у співвідношенні 1:1. Дільники потужності використовуються для живлення різних (двох або декількох) пристроїв від одного джерела високої частоти. Дільники потужності в більшому числі випадків є високочастотні розголужені лінії передачі або кінцеві навантажувальні опори з спеціальними відводами [9]. Блок 15 (див. фіг. 1) - формувач сигнала помилки є одним із пристроїв радіолокаційних та радіонавігаційних систем. Формувач сигнала помилки 15 забезпечує визначення сигнала помилки П у двох режимах роботи: Реж. 1режим пошуку сектора випромінювання в діапазоні кутів 360 ; Реж. 2- режим вимірювання кутового напряику (пеленга) на ВО . У реж. І сигнал помилки П визначається згідно формули П (ПО М 2 ( 2 )] і 0 П АПі , де ПО -константа, яка визначає задане начальне кутове положення пошукової антени (пеленг антени). Пеленг П може мати, наприклад, нульове значення; - константа, яка дорівнює 2( 2) ОП ширині ДС пошукової антени; ПАПі - поточне кутове положення пошукової антени; ПО М - задане поточне кутове по 2( 2) і 0 ложення пошукової антени. Прирощення кута ПО 2( 2) М і 0 величину 2( 2) ОП відбувається через інтервал часу Т 2 , який дорівнює періоду сканування антени ВО. У реж. 2 сигнал помилки П визначається згідно формули П [(ПАП ОП N 1( 1)] П АПі 2 і 0 де ПАП - пеленг на випромінюючий об'єкт при визначенні сектора випромінювання; N ОП 1( 1) - задане поточне ку2 і 0 тове положення вимірювальної антени при вимірюванні пеленга на ВО; поточне кутове положення ПАПі вимірювальної антени; 1( 1) - константа, яка дорівнює прирощенню кутового положення вимірювальної антени, через інтервал часу T1(T1 T2 ) . ПАП Величина 1( 1) ОВ , де ОВ - ширина ДС вимірювальної антени. Оскільки прирощення поточного заданого кутового положення вимірювальної антени відбувається через інтервал часу Ті, то це еквівалентно кутовій швидкості П АП ОП 2 1 i 1 і 0 1 ( 1 )] П АП ОП 2 i і 0 1 ( 1 )] , T1 грд/с Перед початком роботи сигналом початкової установки (ПУ) який надходить з шостого входу блока 15 блоки з запам'ятовуванням 15.2, 15.3, 15.4, 15.5, 15.6, 15.7, 15.8, 15.9, 15.10 установлюються в початковий стан. І. Работа блока 15 у реж. 1. Вхідні сигнали ПАПі та 2 ( 2 ) У вигляді двійкових паралельних кодів надходять відповідно з першого входу блока 5 на блок запам'ятовування 15.5 і з третього входу блока 5 на блок запам'ятовування 15.3. Величина ПО М і 0 2( 2) виробляється в підсумувачі 15.8, на перший і другий входи якого надходять 13 75745 14 N відповідно величина ПО з виходу блока ОП Величина ПАП 1( 1) запам'ятовування 15.1 2 і 0 через блок НІ 15.11 і величина виробляється в підсумувачі 15.9, на перший і дру2 ( 2 ) з блогий входи якого надходить відповідно величини ка запам'ятовування 15.3 через блок НІ 15.12 та блок І 15.15. Видача величин ПО та 2( 2) О з виходу блока запам'ятовування 15.2 (П АП 2 відповідно з блоків запам'ятовування 15.1, 15.3 виконується при надходженні на них імпульса опичерез блок НІ 15.14 і величина 1( 1) з блока тування Оп1 з сьомого входу блока 15. запам'ятовування 15.4 через блок І 15.17 та блок І Одночасно величина ПО з блока 15.1 надхо15.16. дить на одиничний вхід тригера 15.6. Після цього ОП та Видача величин (ПАП 1( 1) І на одиночниму виході тригера 15.6 виробляється 2 керуючий сигнал, який надходить на керуючий вхід відповідно з блоків запом'товування 15.2, 15.4 блока НІ 15.11 і забороняє проходження величини виконується при надходженні на них імпульса опиПо на перший вхід підсумувача 15.8. тування Оп1 з сьомого входу блока 15. Одночасно На керуючий вхід блока І 15.15 з другого входу формувача імпульсної послідовності 15.20 надхоОП величина ПАП блока 15.2 надходить на дить послідовність імпульсних сигналів з періодом 2 T2 . У момент часу надходження імпульсів одиничний вхід тригера 15.7. Після цього на одиімпульсної послідовності через блок І 15.15 прохоничному виході тригера 15.7 виробляється керуючий сигнал, який надходить на керуючий вхід блодить величина на другий вхід ( 2) 2 ка НІ 15.14 і забороняє проходження величини підсумувача 15.8. Величина ПО М з виходу блока 2( 2) і 0 15.8 через блок НІ 15.13, перший вхід блока АБО 15.19 надходить на другий вхід блока віднімання 15.10, на перший вхід якого надходить величина ПАПі з блока запам'ятовування 15.5. Видача величин ПО М і 0 2( 2) , ПАПі відповідно з блоків 15.8 та 15.5 відбувається при надходженні на них імпульса опитування Оп1 з сьомого входу блока 15. Величина помилки П (ПО М і 0 2 ( 2 )] П АПі У вигляді двійкового паралельного коду виробляється в блоці віднімання 15.10 після надходження імпульса опитування Оп1 з сьомого входу блока 15. Після над ОП на перший вхід пудсумувача 15.9. 2 На керуючий вхід блока І 15.16 з першого входу формувача імпульсної послідовності 15.20 надходить послідовність імпульсних сигналів з періодомТ1 . У момент часу надходження імпульсів імпульсної послідовності через блок І 15.16 проходить величина 1( 1) на другий вхід підсумувача 15.9. ПАП N ОП 1( 1) з виходу 2 і 0 блока 15.9 через блок І 15.18, другий вхід блока АБО 15.19 надходить на другий вхід блока віднімання 15.10, на перший вхід якого надходить величина ПАПі з блока запам'ятовування 15.5. Величина Видача ПАП величин ПАП ОП N 1( 1) , 2 і 0 відповідно з блоків 15.9 та 15.5 відбувається ходження імпульса опитування ОП2 з восьмого ПАПі входу блока 15 сигнал помилки П надходить на перший вихід блока 15 у вигляді двійкового паралельного коду. 2. Робота блока 15 у реж. 2. при надходженні на них імпульса опитування Оп1 з сьомого входу блока 15. Величина помилки Вхідні сигнали ПАПі , 1( 1) , П АП ОП у 2 вигляді війкових паралельних кодів надходять відповідно з першого входу блока 15 на блок запам'ятовування 15.5, з другого входу 15 на блок запам'ятовування 15.4, з п'ятого входу блока 15 на блок запам'ятовування 15.2. Вхідний сигнал ЗАХ. (захват) з четвертого входу блока 15 надходить на керуючі входи блоків НІ 15.12, 15.13 і забороняє проходження величини на підсумувач 15.8, і величини 2( 2) ПО М і 0 2( 2) на блок віднімання 15.10, а також на керуючий вхід блока І 15.17. П [(ПАП ОП N у вигляді 1( 1)] П АПі 2 і 0 двійкового паралельного коду виробляється в блоці віднімання 15.10 після надходження імпульса опитування Оп1 з сьомого входу блока 15. Після надходження імпульса опитування ОП2 з восьмого входу блока 15 сигнал помилки П надходить на перший вихід блока 15 у вигляді двійкового паралельного коду. Блоки запам'ятовування 15.1, 15.2, 15.3, 15.4, 15.5,тригери 15.6, 15.7, підсумувачі 15.8, 15.9, блок віднімання 15.10, блоки НІ 15.11, 15.12, 15.13, 15.14, блоки І 15.15, 15.16, 15.17, 15.18, блок АБО 15.19, формувач імпульсної послідовності 15.20 є типовими пристроями цифрової техніки [6,7]. 15 75745 16 Блок 16, 17 (див. фіг. 1) - давача кута через дільник потужності 12, другий блок НІ 14, другий приймач 10 до першого входу блока визна( 1, 2 ) призначений для формування кута чення сектора випромінювання 11, другий вихід . вимірювальної антени 1 сполучений з другим вхоНа фіг.8 наведено один із варіантів побудови дом блока визначення кутових координат 5, вихід давач кута ( 1, 2 ) , який формує кут якого увімкнений до першого входу пристрою Л©(ЛОі, А©2) повороту антени пеленгатора у індикації 6, другий вихід пошукової антени З вигляді цифрового двійкового паралельного коду. увімкнений до другого входу блока визначення Блок 16 складається із блоків І - 16.1, 16.2, сектора випромінювання 11 і першого входу фор16.3, тригерів- 16.4, 16.5, 16.6, ключів- 16.7, 16.8, мувача сигнала помилки 15, вихід, другий, третій, 16.9. четвертий, п'ятий входи якого увімкнені відповідно Перед початком роботи тригери 16.4-16.7 усдо входу приводу антени 2, виходу давача кута тановлюються в початковий стан сигналом 1 16, давача кута 2 17, одиничного виходу початкової установки ПУ, який надходить з другого тригера 18, першого виходу блока визначення секвходу блока 16 на перші входи (входи початкової тора випромінювання 11, другий і третій виходи установки) тригерів 16.4-16.6. На другі входи якого увімкнені відповідно до другого входу притригерів 16.4 - 16.6 надходять керуючі сигнали строю індикації 6 і до одиничного входу тригера відповідно з ключів 16.7, 16.8, 16.9. В залежності 18, одиничний вихід якого з'єднаний з керуючими від положення ключів 16.7-16.9, тригери 16.4 - 16.6 входами першого, другого блоків НІ 8, 14, першоустановлюються в нульове або одиничне полого, другого блків І 9,13, вихід формувача режимів ження. Після приходу імпульса опитування ОП1 з 19 увімкнений до перших входів першого блока НІ першого входу блока 15 на перші керуючі входи 8, першого блока І 9, вхід 21, перший, другий виблоків І 16.1-16.3 сигнали з виходів тригерів 16.4 ходи 22, 23 пошуково-вімірювального пеленгатора 16.6 через другі входи відповідно блоків І 16.1, увімкнені відповідно до другого входу 16.2, 16.3 надходять на перші виходи блока 16 у вимірювальної антени 1, першого і другого входів i. вигляді паралельного двійкового коду пристрою індикації 6. Перший вихід 24 (вихід початкової установки Блоки І - 16.1, 16.2, 16.3, тригери - 16.4, 16.5, ПУ) формувача керуючих сигналів 20 сполучений з 16.6, ключі - 16.7, 16.8, 16.9 є типовими елементавходами початкової установки пристроїв з ми цифрових систем [6]. запам'ятовуванням : блоками 5, 6, 11, 15, 18. ВиБлок 18 (див. фіг. 1) - тригер є типовим елеходи 24-30 формувача керуючих сигналів 20 ментом цифрових схем [6]. Може бути використаз'єднані з відповідними входами блоків 1, 3, 5, 15, на схема типу 155ЛАЗ. 16, 17. Ці зв'язки на фіг. 1 не показані, щоб не Блок 19 (див. фіг. 1) - формувач режимів робозатіняти функціональні зв'язки. Виходи 24 - 30 ти призначений для формування керуючого сигнаформувача 20 з'єднані відповідно з третім входом лу - Реж. 1. Для формування цього керуючого сигблока 1 і третім входом блока 3, першим входом налу може бути використаний перемикач. При блока 16 і першим входом блока 17, третім входом замикані перемикача з першого виходу блока 19 блока 5 і третім входом блока 11, четвертим вхонадходить керуючий сигнал Реж. 1. Перемикач дом блока 5, сьомим входом блока 15, восьмим блока 19 є типовим елементом вимірювальних входом блока 15. електричних схем [10]. Після вмикання формувач керуючих сигналів Блок 20 (див. фіг. 1) - формувач керуючих 20 видає на перший вихід 24 сигнал початкової сигналів. На фіг. 2 наведена часова діаграма установки ПУ, який установлює пристрої з сигналів на виході формувача керуючих сигналів запам'ятовуванням блоки 5, 6, 11, 15, 18 у почат20, які синхронизують роботу пеленгатора. По чаковий стан. совим діаграмам можна по законам формальної Пристрій працює послідовно в двох режимах. логіки синтезувати формувач керуючих сигналів Режим І режим пошуку сектора 20. Блок 20 є типовим пристроєм цифрової техніки, до складу якого входять генератор випромінювання в діапазоні кутів 360 . імпульсів, дільник частоти, лічильники і дешифраРежим II - режим вимірювання кутового натори, які видають керуючі сигнали для прямку (пеленга) на ВО . синхронізації роботи пеленгатора в задані моменКеруючий сигнал Реж. І надходить з формувати поточного часу [6, 7]. пошуковоча 19 на перші входи блока НІ 8, блока І 9. вимірювальному загоризонтному пеленгаторі руКеруючий сигнал Реж. ІІ надходить з одиничхомих випромінюючих об'єктів (див. фіг. 1) перший ного виходу тригера 18, на другі входи блока НІ 8, вхід вимірювальної антени 1 сполучений з вихоблока І 9, керуючий вхід блока 113, блока НІ 14, на дом приводу антени 2 і першим входом пошукової четвертий вхід блока 15. антени 3, другий вхід вимірювальної антени 1 споРежим І режим пошуку сектора лучений з другим входом пошукової антени 3, випромінювання в диапозоні кутів 360 . перші виходи вимірювальної 1 і пошукової 3 антен Пошуковою антеною 3, що виконує обертовий увімкнені відповідно до першого і другого входів рух в горизонтальній площині, проводиться пошук перемикача 7, третій і четвертий входи якого сигналів ВО в диапазон! кутів 360 і фіксується увімкнені відповідно до виходів першого блока НІ 8 кутовий напрямок з якого надходять сигнали. і до першого блока І 9, вихід перемикача 7 Рух антени 3 у горизонтальній площині увімкнений відповідно через дільник потужності виконується за допомогою приводу антени 2, ке12, другий блок І 13, перший приймач 4 до першого входу блока визначення кутових координат 5 і 17 75745 18 потужності 12, блок НІ 14 надходять на другий руючий сигнал - сигнал помилки П на який надприймач 10, де підсилюються. Якщо потужність ходить з формувача сигнала помилки 15. підсиленого сигнала перевищує заданий порогоСигнал помилки П виробляється формувавий рівень, то на виході приймача 10 формується чем сигнала помилки 15 згідно формули імпульс стандартної амплітуди П р , який надхоМ П (ПО 2 ( 2 )) П АПі , дить на перший вхід блока визначення сектора і 0 випромінювання 11. На другий вхід блока 11 надМ де, (ПО ходить величина ПАПі у вигляді двійкового пара2 ( 2 )) - поточне кутове полоі 0 лельного коду з другого виходу пошукової антени ження пошукової антени 3; 3. ПО - константа, яка визначає начальне кутове У блоці визначення сектора випромінювання положення пошукової антени 3 пеленг антени). 11 виробляються стгнали: сигнал захоплення Пеленг ПО може мати, наприклад, нульове знавипромінювання ВО пошуковою антеною 3 - сигчення; нал ЗАХ, пеленг пошукової антени 3 на ВО ПАПі , 2 ( 2 ) - константа, яка дорівнює ширині ДС кутове положення вимірювальної антени 1, з якого пошукової антени 3; виконується переміщення в горизонтальній площині вимірювальної антени 1 для визначення ПАПі - поточне кутове полиження пошукової пеленга вимірявальної антени 1 на антени 3. Прирощення кута (ПО чину 2( 2) ОП М 2 ( 2 )) і 0 на вели відбувається через інтервал часу Т 2 , який дорівнює періоду сканування антени ВО. Таким чином, зміна поточного заданого кутового положення пошукової антени 3 за інтервал часу Т 2 рівнозначна тому, що пошукова антена 3 переміщується в горизонтальній площині з нерівномірною кутовою швидкістю ПO * 2 i 1 П0 2 ( 2 )] і 0 * 2 i і 0 2 ( 2 )] T2 2( T2 2) ОП [ПO (ПO M і 0 2 ( 2 )] M і 0 2 ( 2 )) , П АПі виробляється формувачем сигнала помилки 15 після надходження імпульса опитування ОП3 на його сьомий вхід з четвертого виходу 27 формувача 20. Після надходження імпульса опитування ОП4 на восьмий вхід блока 15 з п'ятого виходу 28 формувача 20 сигнал помилки П (П0 М і 0 2( 2) П АПі , виходу блока 15 надходить на вхід блока 2. Послідовність оброблення сигналів від ВО така. У момент часу, коли діаграма спрямованості пошукової антени 3 починає проходити напрямок ВО, сигнали (імпульси) від ВО з першого виходу пошукової антени 3 через перемикач 7, дільник ОП 2 ОП виробляється у 2 блоці 11 після надходження імпульса опитування Огі5 з шостого 29 виходу формувача 20 на третій вхід блока 11. Величини ПАП , (ПАП ОП надходять 2 відповідно на третій, другий, перший виходи блока 11. Сигнали ЗАХ, ПАП , (ПАП ОП у вигляді 2 двійкових паралельних кодів надходять відповідно на другий і третій виходи блока 11 після надходження сигнала опитування ОП5 з шостого виходу 29 формувача 20 на третій вхід блока 11. Величини Т2 Величини ПАПі , 2 ( 2 ) У вигляді двійкових паралельних кодів надходять на перший і третій входи формувача сигнала помилки 15 відповідно з другого виходу пошукової антени 3 і виходу блока 17. Видача величин ПАПі , 2 ( 2 ) з блоків 3, 17 відбувається при надходженні імпульса опитування ОП1 на третій вхід пошукової антени 3 з другого виходу 25 формувача 20 і імпульса опитування ОП2 на перший вхід блока 17 з третього виходу 26 формувача 20. Величини ВО (П АП ПАП , (ПАП ОП надходять 2 відповідно на другий вхід блока індикації 6 і другий вихід 23 пошуково-вимірювального пеленгатора, п'ятий вхід формувача сигнала помилки 15. Сигнал ЗАХ з третього входу блока 11 надходить на одиничний вхід тригера 18. Після цього на одиничному виході тригера 18 виробляється керуючий сигнал Реж. 2, який надходить на другі входи блока НІ 8, блока І 9, керуючі входи блока І 13, блока НІ 14, на четвертий вхід (вхід ЗАХ) формувача сигнала помилки 15. По сигналу Реж. 2 з одиничного виходу тригера 18 пошуково-вимірювальний пеленгатор переходить у режим 2. Режим 2 - режим вимірювання кутового напрямку (пеленга) на ВО . Вимірювальною антеною 1, вісь якої співпадає з віссю пошукової антени 3, а виконується переміщення в ОВ ОП , горизонтальній площині і проводиться пошук сигналів ВО в диапазон! кутів Величини ПАП , (ПАП ОП 02 (ПАП ОП 2 2 і фіксується кутовий напрямок, з якого надходять сигнали. (ПАП 19 75745 20 Рух антени 1 у горизонтальній площині Послідовність оброблення сигналів від ВО тавиконується за допомогою приводу антени 2, кека. У момент часу, коли діаграма спрямованості руючий сигнал - сигнал помилки П на який надвимірювальної антени 1 починає проходити находять з формувча сигнала помилки 15. прямок на ВО, сигнали (імпульси) від ВО з першоСигнал помилки П виробляється формуваго виходу вимірювальної антени 1 через перемичем сигнала помилки 15 згідно формули кач 7, дільник потужності 12, блок І 13 надходять N на перший приймач 4, де підсилюються. Якщо ОП П [(ПАП 1( 1)] П АВі , потужність підсиленого сигнала перевищує зада2 і 0 ний пороговий рівень, то на виході приймача 4 де ПАП - пеленг на випромінюючий об'єкт при формується імпульс стандартної амплітуди П р , визначенні сектора випромінювання; який надходить, на перший вхід блока визначення N ОП кутового напрямку 5. На другий вхід блока 5 над(ПАП ( 1)] поточне кутове по1 2 і 0 ходить величина П У вигляді двійкового паралельного коду з другого виходу ложення вимірювальної антени 1 при вимірюванні вимірювальної антени 1. пеленга на ВО; У блоці визначення кутового напрямку 5 випоточне кутове положення ПАВі вимірювальної антени 1; 1( 1) - константа, яка дорівнює прирощенню кутового положення вимірювальної антени 1 через інтервал часу Т1(Т1 T1) . Величина 1( 1) ОВ , де ОВ ширина ДС вимірювальної антени 1. Так як прирощення поточного заданого кутового положення вимірювальної антени 1 на величину 1( 1) відбувається через інтервал часу Т1 T2 , то це рівнозначно тому, що вимірювальна антена 1 переміщується в горизонтальній площині з кутовою швидкістю 1 ОП П АП 2 i 1 П АП 2 ( 2 )] і 0 1 і 0 2 1 ( 1 )] T1 1( 1) T1 Величини ПАВі , 1( 1) у вигляді двійкових паралельних кодів на перший і другий входи формувача сигнала помилки 15 надходять відповідно з другого виходу пошукової антени 3 (так як осі пошукової 3 і вимірювальної 1 антен співпадають то ПАПі ПАВі і виходу блока 16. Видача величин ПАВі , 1( 1) з блоків 3 і 16 відбувається при надходженні імпульса опитування ОП1 на третій вхід пошукової антени 3 з другого виходу 25 формувача 20 і імпульса опитування ОП2 на перший вхід блока 16 з третього виходу 26 формувача 20. ПАП і 0 2 N ОП 2 N ОП Величини (П АП і 0 1( 1) 1( 1) . П АП ОП 2 дить на вхід блока 2. 1( 1) і 1 П АВі П11 m після надходження на його третій вхід імпульса опитування ОП5 з шостого виходу 29 формувача і 1 20. Величини m і 1 П АВі , m , П11 виробляються в ку товому стробі, який формується таким чином П стр П кстр П пстр , де П пстр П кстр ПАВІ П пстр ОВ П кстр - кінець кутового строба; ОВ - константа, яка дорівнює кутовій ширині ДС вимірювальної антени 1 на вибраному рівні потужності. Величина П пстр ПАВІ , П кстр ПАВІ ОВ ; де ПАВІ - кутове положення першого імпульсу П р , який надходить з виходу приймача 4. Коли виконується умова ПАВІ П кстр ПАВІ у блоці 5 закінчується ОВ m обчислення величин m П АВі , m , П АВі надхо і 1 П АВі П11 . m Після надходження імпульса опитування ОП6 і 1 з сьомого виходу 30 формувача 20 на четвертий вхід блока 5 величина П АВі N і 0 П АВі , m , m виробляється формувачем сигнала помилки 15 після надходження імпульса опитування ОП3 на його сьомий вхід з четвертого виходу 27 формувача 20. Після надходження імпульса опитування ОП4 на восьмий вхід блока 15 з п'ятого виходу 28 формувача 20 сигнал помилки П робляються сигнали: П пстр - початок кутового строба; i ОП m m і 1 П АВі П11 у вигляді m війкового паралельного коду надходить з виходу блока 5 на на перший вхід пристрою індикації 6 і перший 22 вихід пошуково-вимірювального пеленгатора. Пристрій, що заявляється має технічні переваги над прототипом, а саме пристрій забезпечує значне зменшення часових витрат на перехват сигналів ВО в діапазоні кутів 360 . Значне зменшення часових витрат на перехват сигналів ВО в діапазоні кутів 360 забезпечується тим, що значно підвищується кутова швидкість ОП 30 50 за рахунок викори 21 75745 22 стання пошукової антени з широкою ДС об'єкта». Деклараційний патент України 46245 A, G01S 3/02. 5/04. Бюл.5,2002 р. ( ОП 30 50 ) порівняно з кутовою швидкістю 3. М. Скольник. «Введение в технику радиоло1 . з якою переміщується вимірювальна антена з кационных систем». Изд-во «Мир», М.,1965. Глава вузькою ДС ( ОВ 3 5 ). 2. Методы обзора пространства и измерение координат, стр.21-93. Глава 7. Антенны, стр. 317* Кутова швидкість пошукової антени 2 431. Глава 5. Раздел 5.9. Радиолокационные визначається формулою станции, стр. 248-251. Глава 8. Приѐмники, стр. * 432-475. 2 ОП / Т о , 4. Д. Бартон. «Радиолокационные системы». де Т о - період сканування антени ВО. Изд-во МО СССР, М., 1967. Глава 9. Измерение При цьому часові затрати на перехват угловых координат и сопровождение цели, стр. сигналів у діапазоні кутів 360 при ОП 30 50 268-368. 5. И. А. Кудряшов и др. «Основы радионавигазменшується в 10 разів порівняно з протопипом ционных устройств». Л., 1958. Глава 4. Общие (при ОВ 3 5 ) і дорівнюють 36-60с при То 5с , характеристики аппаратуры навигационных усті 72 120с при То 10с . ройств., стр. 49-108. Глава 5. Амплитудные пеленУ ДП "Фінмаш" розроблені елементи макета гаторы, стр. 71-107. Глава 9. Фазовые радионавизагоризонтного пошуково-вимірювального пеленгационные устройства, стр. 179-201. гатора рухомих ВО, який реалізує окремі технічні 6. Р. К. Ричарде. «Элементы и схемы цифрорішення пеленгатора що пропонується. вых вычислительных машин». Изд-во ИЛ. М., Розроблена програма відпрацювання макета, 1961. що реалізує структуру запропонованого пристрою. 7. И. Н. Букреев, В. М. Мансуров, В. И. ГоряТехнічна документація на винахід, що чев. «Микроэлектронные схемы цифровых устпропонується, виконана на рівні ескізних креслень, ройств». Изд-во «Советское радио». М., 1975. що дозволяють відтворити запропонований "По8. «Теоретические основы радиолокации» под шуково-вимірювальний загоризонтний пеленгатор редакцией Я. Д. Ширмана. Изд-во «Сов. Радио». рухомих випромінюючих об'єктів" М., 1970. Глава 5. Измерение угловых координат, Література стр. 274-324. 1. Ю. М. Казаринов и др. «Радиотехнические 9. Р. А. Валитов, В. М. Сретенский. «Радиоизсистемы». Изд-во «Сов. Радио». М.,1968. Глава мерения на сверхвысоких частотах». Военное изд10. Радиоразведка. Радиопротиводействие и во МО СССР, М., 1958. § 3.8. Делители мощности. борьба с организованными помехами, стр. 37710. Орнатский П. П. «Автоматические измере389. ния и приборы аналоговые и цифровые». Киев, 2. Остапов А. О. та інші. «Пристрій для визна«Вища школа», 1973. чення координат рухомого випромінюючого 23 75745 24 25 Комп’ютерна верстка М. Клюкін 75745 Підписне 26 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSearch-and-measuring over-the-horizon location finder of mobile radiating objects
Автори англійськоюOstapov Anatolii Oleksandrovych, Chyhyryn Oleh Trokhymovych
Назва патенту російськоюПоисково-измерительный загоризонтный пеленгатор подвижных излучающих объектов
Автори російськоюОстапов Анатолий Александрович, Чигирин Олег Трофимович
МПК / Мітки
МПК: G01S 3/02
Мітки: пеленгатор, загоризонтний, рухомих, випромінюючих, пошуково-вимірювальний, об'єктів
Код посилання
<a href="https://ua.patents.su/13-75745-poshukovo-vimiryuvalnijj-zagorizontnijj-pelengator-rukhomikh-viprominyuyuchikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Пошуково-вимірювальний загоризонтний пеленгатор рухомих випромінюючих об’єктів</a>
Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об’єктів
Номер патенту: 8961
Опубліковано: 15.08.2005
Автори: Андрусенко Микола Іванович, Білановський Михайло Миколайович, Толстіхін Микола Вікторович, Біличенко Іван Федорович, Шовгун Віталій Андрійович, Ліпатов Валерій Павлович, Єна Григорій Олександрович
Мітки: радіолокаційна, об'єктів, випромінюючих, надводних, вимірювання, носіїв, повітряних, координат, станція, пасивна
Формула / Реферат:
1. Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об'єктів, що містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, пристрій індикації, перший блок обчислення відстані, формувач керуючих сигналів, при цьому перший вхід антени через привід антени підключений до першого виходу датчика сканування антени, перший вихід антени підключений до першого...
Доплеровський пеленгатор
Номер патенту: 24676
Опубліковано: 04.08.1998
Автори: Муратов Олександр Олексійович, Лігінов Сергій Михайлович, Мєдвєдєв Сергій Леонідович, Гудзюк Василь Петрович, Сирма Олексій Олексійович, Литвиненко Валентин Іванович, Бєліков Евген Миколайович
МПК: G01S 3/14
Мітки: пеленгатор, доплеровський
Формула / Реферат:
Доплеровський пеленгатор, що містить N пеленгаційних антен, еквідистантно розташованих по колу, що включають N симетричних вібраторів і N симетруючих пристроїв, причому N більше чи рівно 3, N-канальний комутатор, генератор імпульсів комутації, малошумлячий підсилювач, центральну антену та комплект апаратури пеленгування і керування, причому виходи симетруючих пристроїв підключені до входів N-канального комутатора, вихід якого підключений до...
Багатоканальна електромагнітна пошуково-вимірювальна система

Номер патенту: 55043
Опубліковано: 17.03.2003
Автори: Драбич Олег Петрович, Яворський Ігор Миколайович, Драбич Петро Петрович, Банахевич Юрій Володимирович, Кичма Андрій Олексійович, Стецько Ігор Григорович, Коваль Роман Ілліч
МПК: G01R 19/00, G01R 33/02, G01V 3/10
Мітки: багатоканальна, електромагнітна, пошуково-вимірювальна, система
Формула / Реферат:
Багатоканальна електромагнітна пошуково-вимірювальна система, що складається з ближньої і дальньої до обстежуваної комунікації пар намотаних на окремих феритових осердях приймальних та калібраційних котушок, калібраційного генератора, резистора, вмикача, блока попередніх підсилювачів, блока вузькосмугових підсилювачів, блока перетворювачів змінної напруги в постійну, обчислювального блока, блока індикаторів і генератора змінного струму, в...
Мікрокомп’ютерна електромагнітна пошуково-вимірювальна система
Номер патенту: 37807
Опубліковано: 15.05.2001
Автори: Драбич Олег Петрович, Драбич Петро Петрович, Драбич Петро Петрович (мол.)
МПК: G01R 19/00, G01V 3/10
Мітки: електромагнітна, система, пошуково-вимірювальна, мікрокомп'ютерна
Текст:
...напруг 9 приєднані початки другої і третьої вимірювальних котушок 5 і 6, закінчення вимірювальних котушок 4, 5 і 6 підключені до шини нульового потенціалу, виходи першого і другого віднімачів напруг 8 і 9 через вибірні підсилювачі 11 і 12 підключені мультиплексора 13, вихід якого з'єднаний з входом першого керованого підсилювача 14, вихід цього підсилювача з'єднаний з входом першого аналого-цифрового перетворювача 15, входи формувача...
Пристрій для виявлення рухомих об’єктів
Номер патенту: 2285
Опубліковано: 26.12.1994
Автори: Кондратик Володимир Васильович, Усик Іван Федорович
МПК: G01S 13/56
Мітки: пристрій, виявлення, рухомих, об'єктів
Формула / Реферат:
Устройство для обнаружения движущихся объектов, содержащее сверхвысокочастотный (СВЧ) излучатель-приемник, содержащий резонансную камеру с диодом Ганна и приемный СВЧ-элемент, выход которого через фильтр сигнала с частотой доплеровского сдвига соединен с входом усилителя переменного напряжения, пороговый блок, вход которого соединен с выходом фильтра переменного напряжений, выход порогового блока соединен с входом блока задержки, выход...
Попередній патент: Хвильовий електродвигун
Наступний патент: Апарат для дослідження хемілюмінесценції
Випадковий патент: Парогазотурбінний двигун