Кінематична схема приводу вантажного триколісного велосипеда
Номер патенту: 79112
Опубліковано: 10.04.2013
Автори: Семотюк Віталій Мирославович, Семотюк Мирослав Васильович

Формула / Реферат
1. Кінематична схема приводу вантажного триколісного велосипеда, що містить вал каретки, закріплений з обох боків у втулці каретки за допомогою підшипників, в зборі, праву педаль з ведучою зіркою в зборі, задню вісь, закріплену на рамі за допомогою підшипників, в зборі, привідну зірочку з обгінною муфтою (типу тріскачка), внутрішня втулка якої встановлена на задній осі нерухомо, в зборі, ланцюг, що сполучає ведучу зірку правої педалі і привідну зірочку, ліве заднє колесо, що може обертатися на задній осі вільно в обидва боки, в зборі, праве заднє колесо, закріплене на цій же задній осі нерухомо, в зборі, яка відрізняється тим, що додатково введено ліву педаль з ведучою зіркою, в зборі, зірочку-сателіт, вал, лівий ланцюг, ліву привідну зірочку з обгінною муфтою (типу тріскачка) в зборі, при цьому ліву педаль з ведучою зіркою в зборі встановлено на підшипниках на валу каретки на місці лівої педалі таким чином, що має можливість вільно обертатися на ньому, вал закріплено нерухомо на рамі велосипеда під прямим кутом до валу каретки нерухомо, на якому встановлена зірочка-сателіт таким чином, що має можливість обертатися вільно на ньому і знаходиться відповідно в постійному зчепленні з ведучою зіркою правої педалі і ведучою зіркою лівої педалі, а ліву привідну зірочку з обгінною муфтою (типу тріскачка) в зборі встановлено на задній осі на такій відстані від привідної зірочки, що дорівнює відстані між ведучими зірками правої педалі та лівої педалі, внутрішня втулка муфти лівої привідної зірочки закріплена на задній осі нерухомо, а лівий ланцюг сполучає ведучу зірку лівої педалі з лівою привідною зірочкою відповідно.
2. Кінематична схема приводу вантажного триколісного велосипеда за п. 1, яка відрізняється тим, що ланцюг подовжено в два рази і сполучено його з зірками так, що верхня точка ведучої зірочки лівої педалі сполучена ланцюгом з верхньою точкою привідної зірочки, нижня точка ведучої зірки лівої педалі сполучена з верхньою точкою лівої привідної зірочки, нижня точка цієї зірочки сполучається з нижньою точкою ведучої зірки правої педалі, а верхня точка цієї зірки правої педалі сполучена з нижньою точкою привідної зірочки, причому відстань між ведучими зірочками та привідними зірочками відповідно попарно дорівнює подвійній товщині ланцюга.
3. Кінематична схема приводу вантажного триколісного велосипеда за пп. 1, 2, яка відрізняється тим, що у вузол задніх коліс з метою ліквідації нерівномірного зносу шин задніх коліс додатково введено праву піввісь, що закріплена до рами велосипеда з обох боків на підшипниках і має можливість обертатися в обидва боки, ліву піввісь, що закріплена до рами велосипеда з обох боків на підшипниках і має можливість обертатися в обидва боки, при цьому на правому кінці правої півосі закріплено нерухомо праве заднє колесо, на лівому кінці цієї правої півосі закріплено нерухомо внутрішню втулку обгінної муфти привідної зірочки, на лівому кінці лівої півосі закріплено нерухомо внутрішню втулку обгінної муфти лівої привідної зірочки, а правому кінці лівої півосі закріплено нерухомо праве заднє колесо відповідно.
Текст
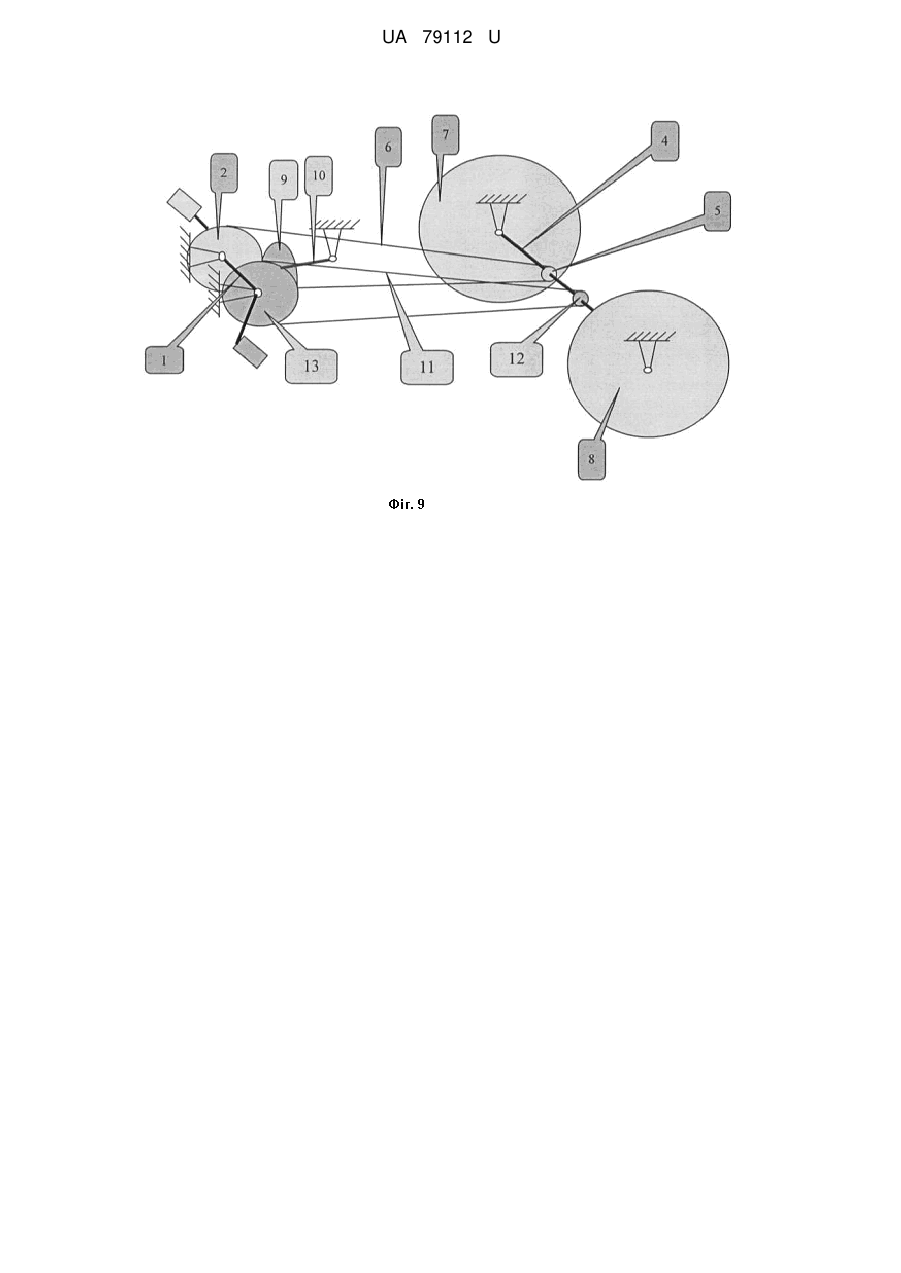
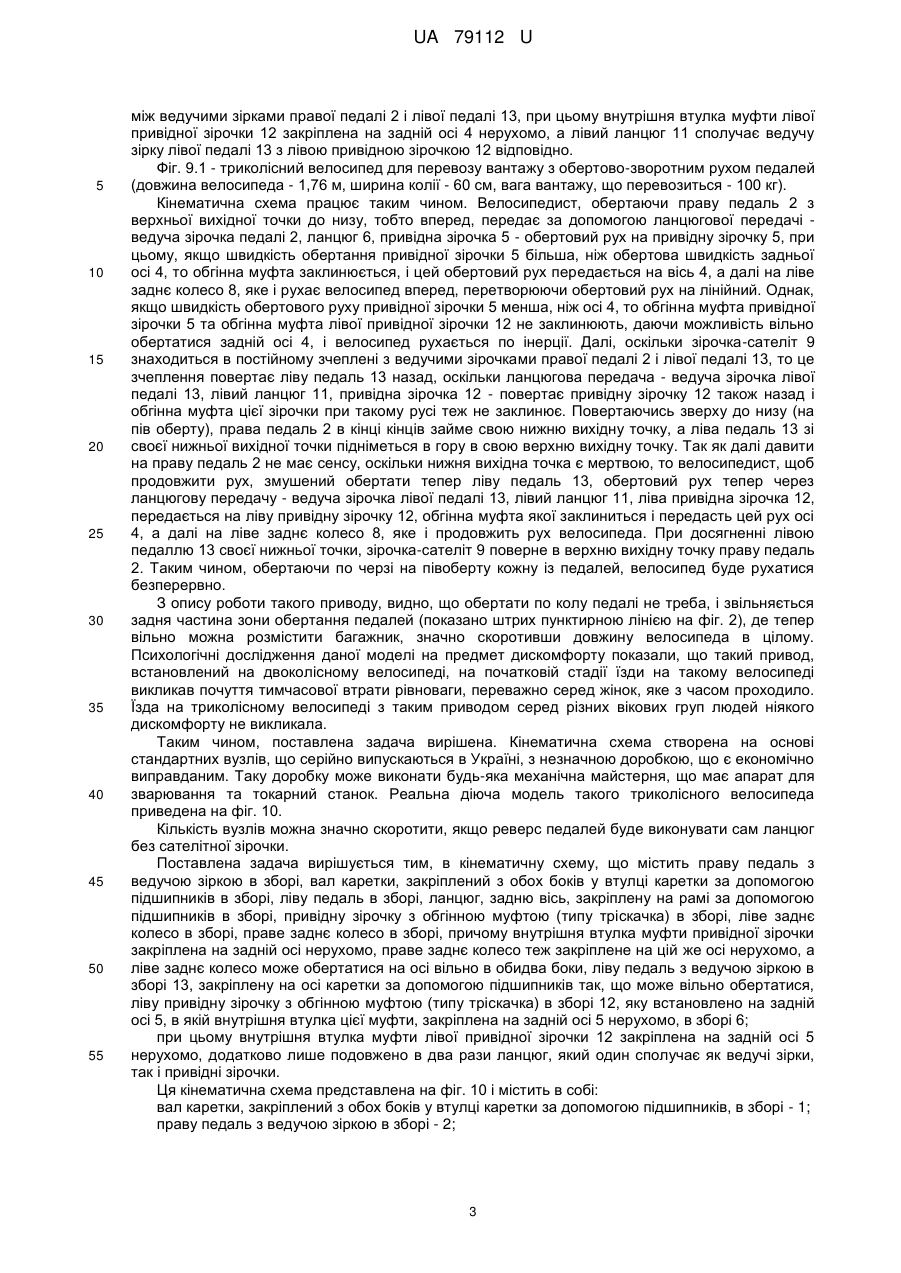
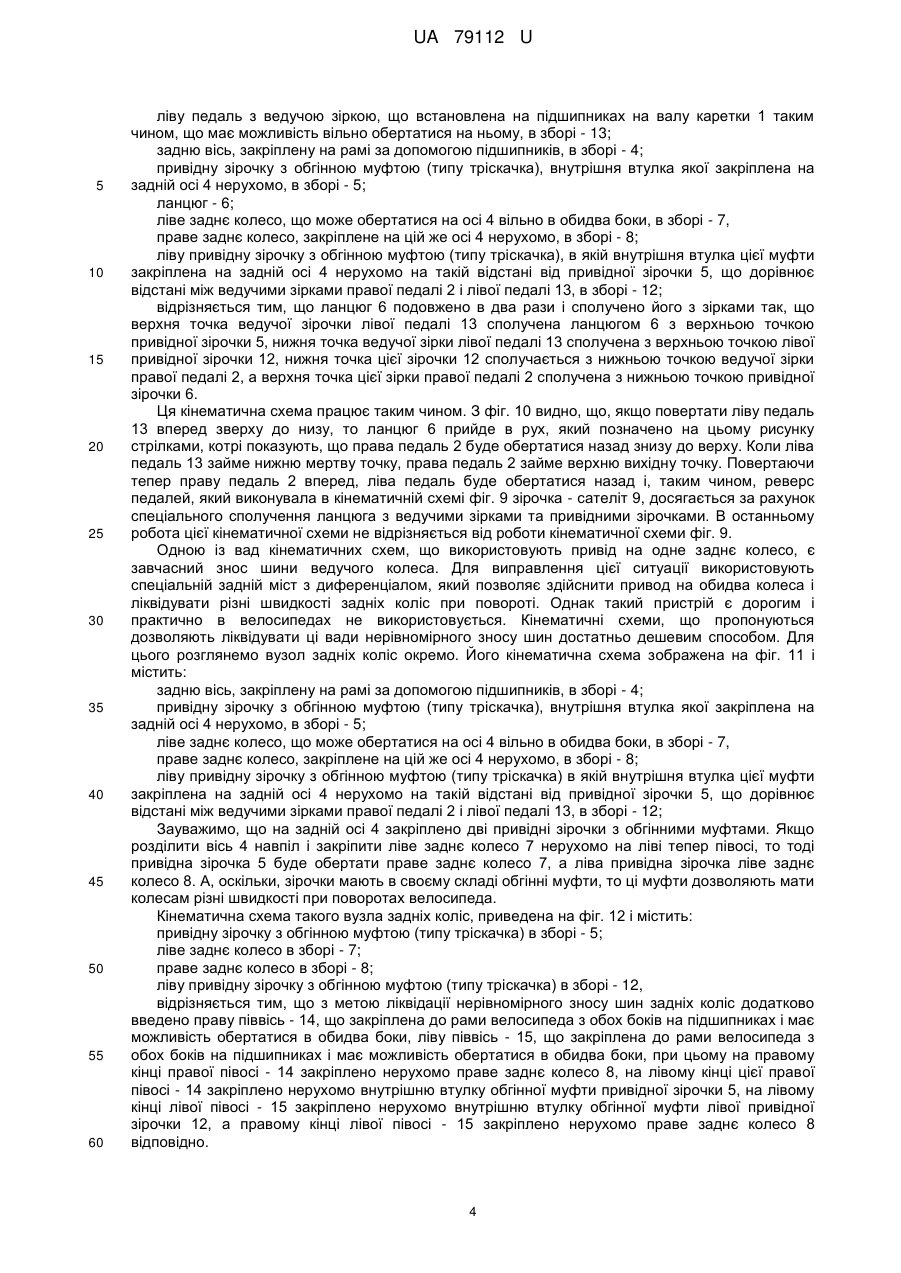
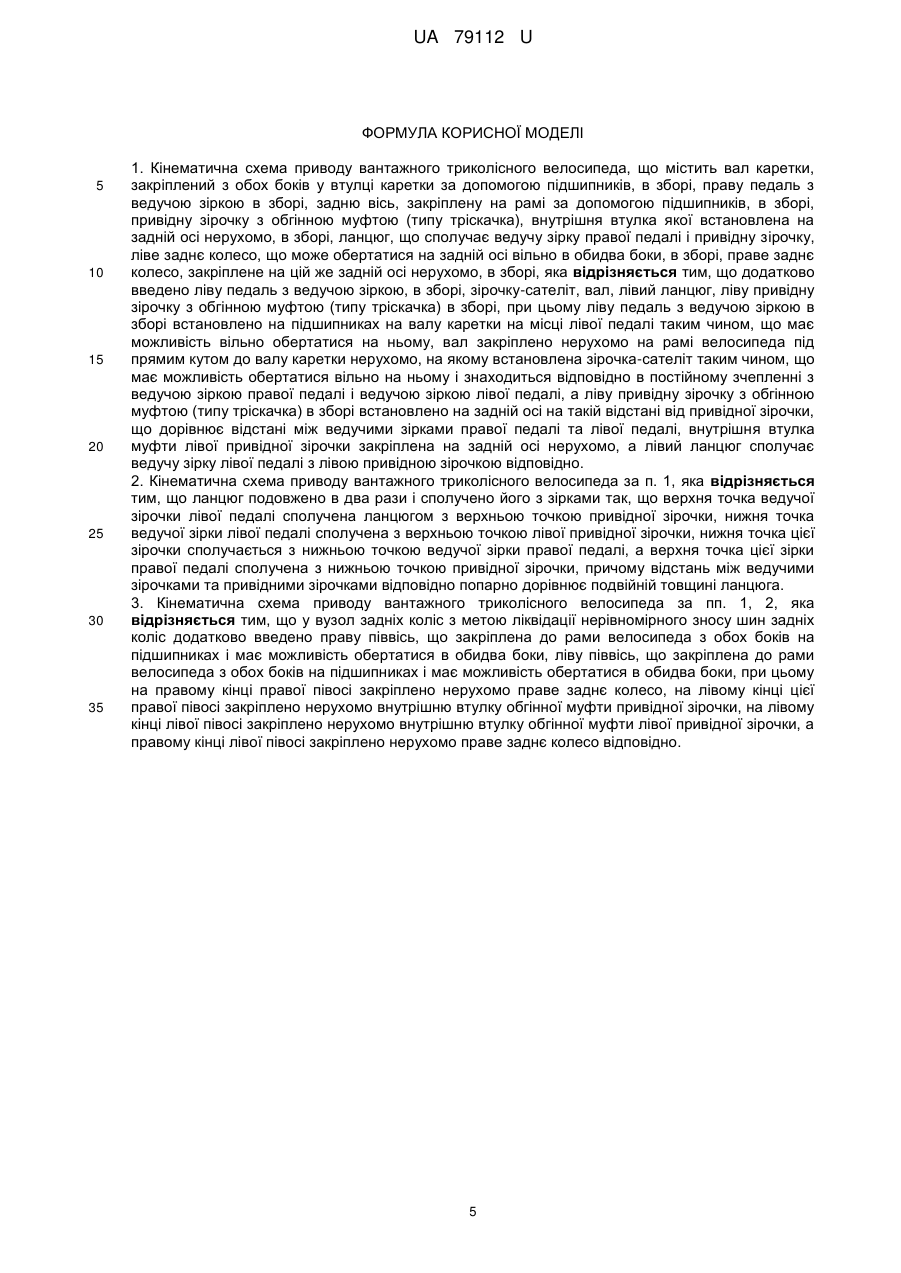
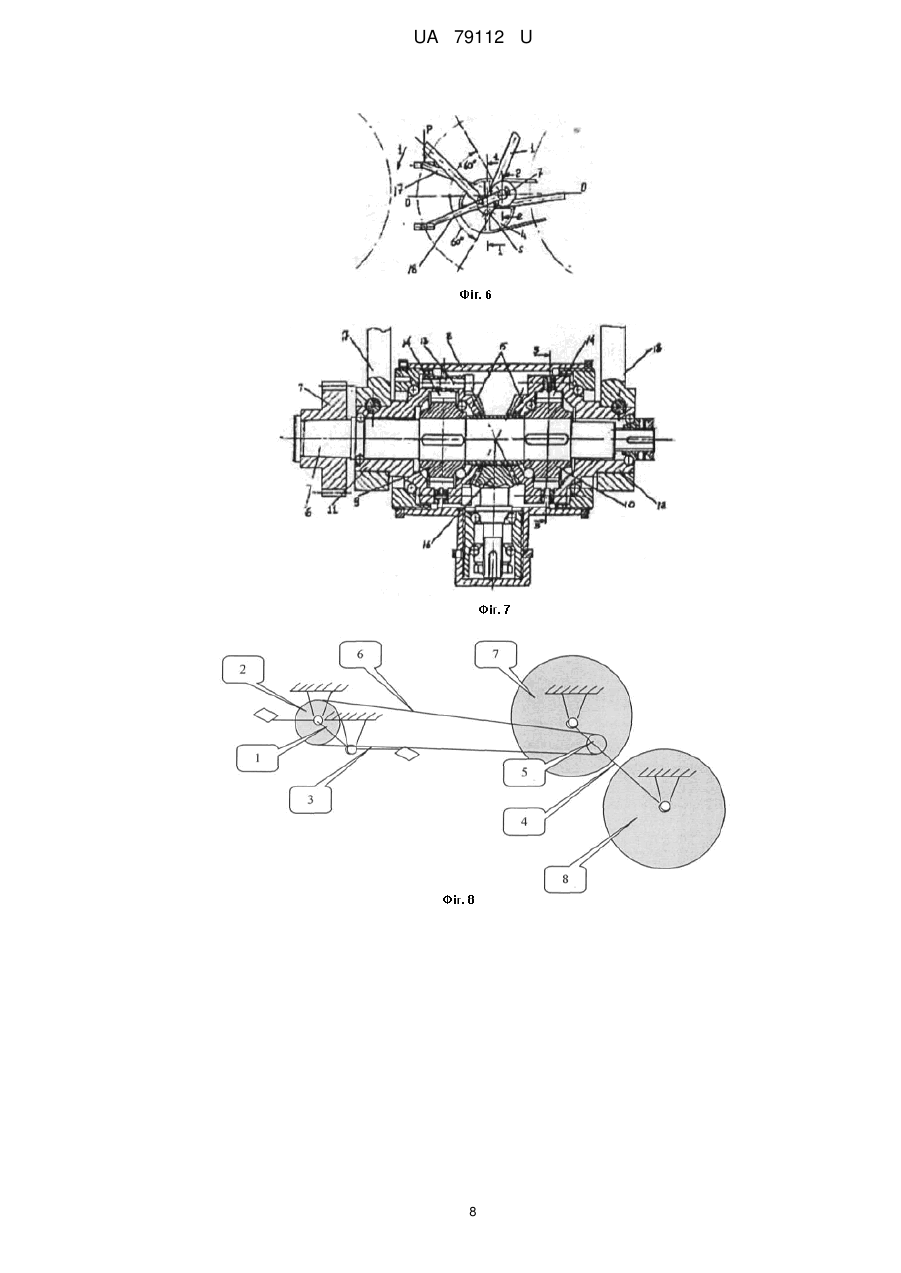
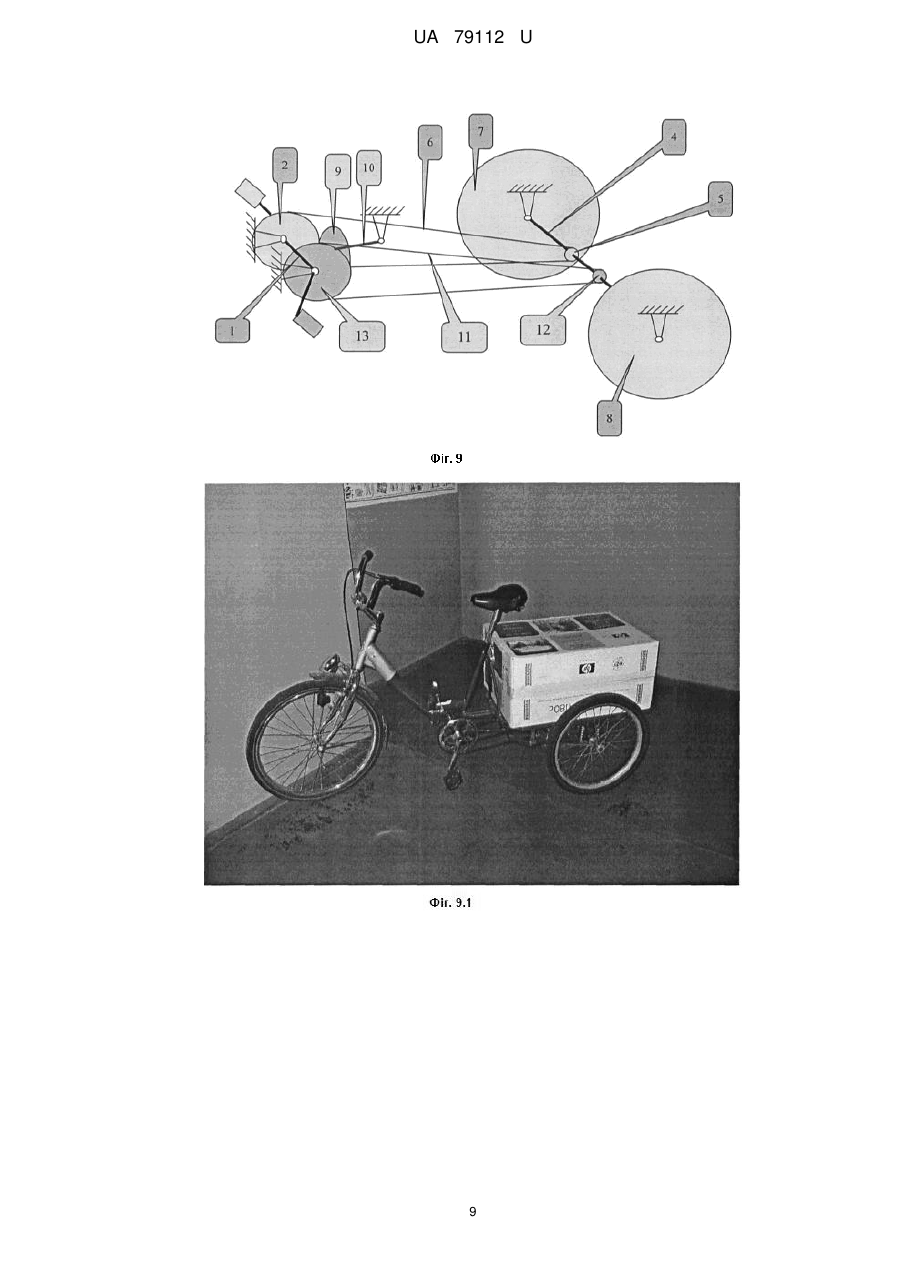
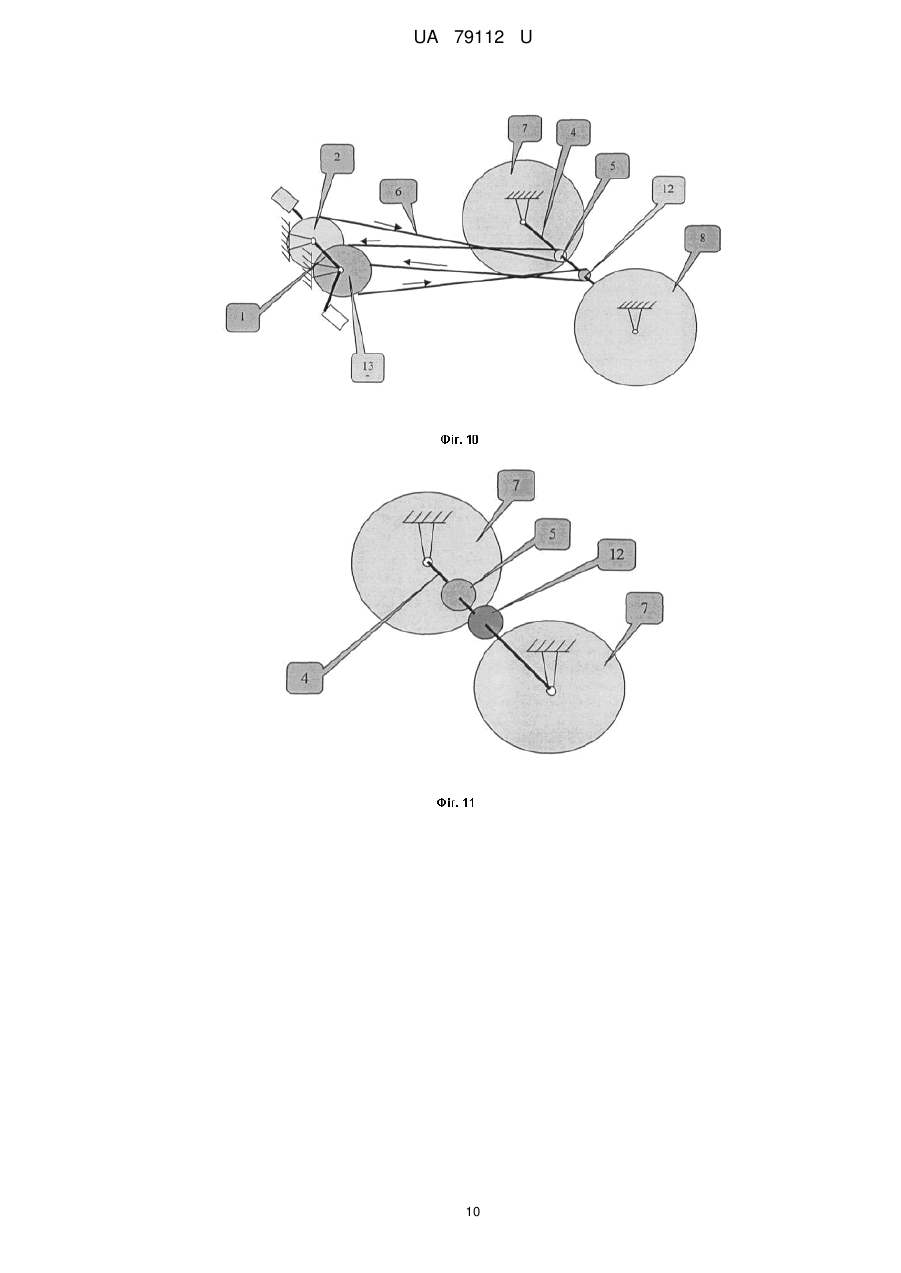
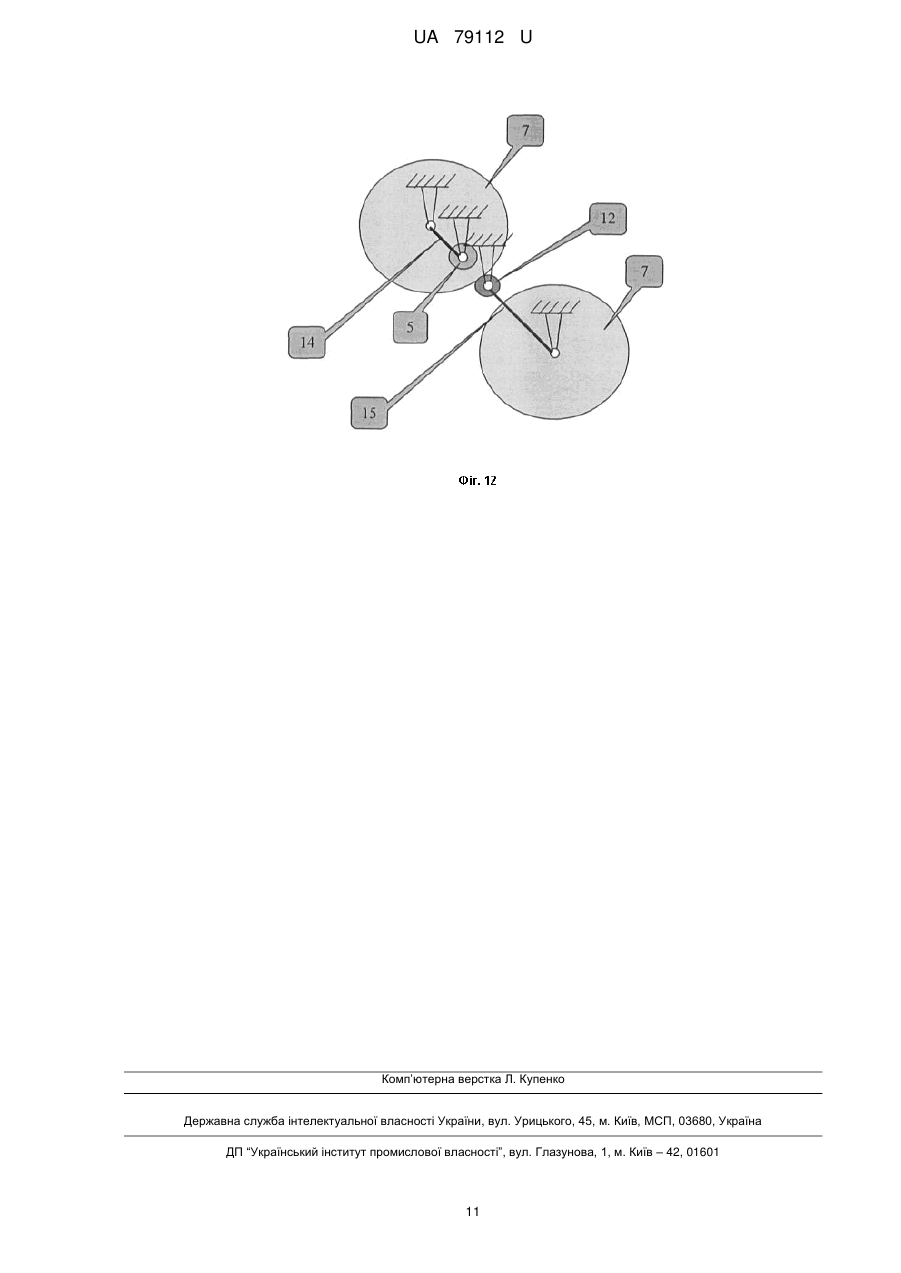
Реферат: UA 79112 U UA 79112 U 5 10 15 20 25 30 35 40 45 50 55 60 Кінематична схема є основою побудови приводу триколісних транспортних засобів, зокрема вантажних велосипедів. Відомі велосипеди для перевезення вантажів та пасажирів див. [СССР, Пюльккяненн А.Н., Лещенко B.C. Спутник велосипедиста. - Лениздат, 1960. - С. 8] та див. [СССР, Охлябинин Сергей "Давай изобретем велосипед". - Москва: "Молодая Гвардия", 1981. - С. 128, фотовкладка], а також патент РФ № 8574. Вони містять візки, що розташовані спереду та закріплені до рами велосипеда через шарнірне з'єднання, яке встановлено на задньому торці корпуса візка, фіг. 1. До недоліків цих пристроїв належить: - Зайві витрати м'язової енергії внаслідок утрудненого керування в залежності від вантажної ваги, шляхової якості та рельєфу, вітрової швидкості та спрямування, оскільки вантаж необхідно утримувати в напрямі руху кермом велосипеда. Відомі також технічні рішення, які підвищують експлуатаційні можливості велосипеда шляхом розміщення багажника для вантажу позаду велосипедиста, при цьому є дві можливості, які ілюструються фіг. 2, де показана можлива зона розміщення багажника (вона заштрихована) і зона обертання педалей з урахуванням руху ніг велосипедиста. Перша можливість базується на встановленні багажника над зоною обертання педалей фіг. 3, 4 і ця можливість використовується в велосипедах, що випускаються серійно в Росії. Однак вага вантажу, що транспортується таким велосипедом, обмежена до тридцяти кілограмів, оскільки вантаж знаходиться на значній висоті від землі і при більшій вазі вантажу стає не стійким під час руху (див. технічні параметри). Друга можливість, як видно з фіг. 2, використовує простір за межею осі заднього колеса велосипеда. При цьому велосипед подовжується на довжину багажника фіг. 5, вага вантажу збільшується до 200 кГ, вантаж розміщується на невеликій висоті від землі, що і дає велосипеду необхідну стійкість. Такі велосипеди випускаються серійно переважно в країнах Індокитаю. Не зважаючи на те, що на ринку існує достатня кількість моделей вантажних велосипедів, їх використання в Україні, а також в країнах СНД, надзвичайно мале, хоча двоколісними велосипедами користується значна кількість населення. Таке незвичайне явище, як показують дослідження, пов'язане з тим, що ні одна з конструкцій триколісних вантажних велосипедів не задовольняє умовам, що є на Україні. Це: - повна відсутність стоянок для велосипедів, що охороняються; - ліфти в житлових будинках мають такі розміри, що велосипеди, які можуть перевозити вантажі більше 40 кГ, за своїми габаритами в ці ліфти не поміщаються; - колія вантажних велосипедів значно більша, ніж колія дитячих колясок, в зв'язку з чим вона не дає можливості скористатися похилими площинами, якими обладнані практично всі сходи в житлових будинках та підземні переходи в наших містах і які призначені для пересування цих колясок. Таким чином, технічні вимоги, що задовольнять умовам, які склалися в Україні, такі: - довжина велосипеда не повинна перевищувати двох метрів, бажано 1,8 м; - ширина колії велосипеда не повинна перевищувати 80 см; - вага вантажу, що транспортується велосипедом не менше 80-100 кГ. Очевидно, що задовольнити цим умовам можна, скоротивши частково зону обертання педалей (на рисунку, фіг. 2, вона відділена вертикальною штриховою лінією). Для цього необхідно замінити обертовий рух педалей на обертово-зворотний, тобто, коли одна педаль йде вниз друга в той же час піднімається вгору, за рахунок чого і зменшується вище вказана зона. Такі рішення відомі, наприклад, таке рішення для двоколісного велосипеда пропонується в статті А.Е. Кропп, профессор, д.т.н. "Велосипед в Росии и в мире", сайт redBice.ru. а також аналогічний патент України UA 49168 (БИ № 9 16.09.2002) В цій статті пропонується, з аналізом переваг зазначеного приводу, дві області використання (цитата зі статті на мові оригіналу): 1. Предложенный привод используется для экономии работы, затрачиваемой велосипедистом при езде. При этом затраты работы могут быть снижены на 30 % от затрат на обычном велосипеде. 2. Предложенный привод педалей дает возможность использование велосипедов для той части населения, которая имеет повреждение коленного или бедренного сустава различного происхождения, как ранения и операции. На рисунках фіг. 6, 7 ілюструється принцип дії та креслення самого приводу, з яких видно, що цей привід є навісним і дуже складним та дорогим, бо має крім звичайної ланцюгової передачі, ще й перетворювач руху, як називає його автор, побудований на основі конічних та циліндричних шестерних зчеплень, що не є деталями звичайних велосипедів. Тому таке рішення не є економічно виправданим. 1 UA 79112 U 5 10 15 20 25 30 35 40 45 50 55 60 Відома також велосипедна передача, патент UA 35080 (БИ № 16 25.08.2008), що реалізує обертово-зворотний рух педалей велосипеда, однак виконана за допомогою тросів обгінних муфт та пружин, що є неприйнятним для вантажних велосипедів. Тому таке рішення теж не є економічно виправданим. В основу корисної моделі поставлено таке вирішення цієї задачі, яке задовольняє вище вказаним технічним вимогам. Як найближчий аналог вибрано триколісний велосипед Stels Energy, фіг. 3 або велосипед фіг. 5, що випускаються серійно. Кінематична схема приводу такого велосипеда давно відома, будується зі стандартних деталей і зображена на фіг. 8. Вона містить: вал каретки, закріплений з обох боків у втулці каретки за допомогою підшипників, в зборі - 1; праву педаль з ведучою зіркою в зборі - 2; ліву педаль, закріплену на валу каретки нерухомо, в зборі - 3; задню вісь, закріплену на рамі за допомогою підшипників, в зборі - 4; привідну зірочку з обгінною муфтою (типу тріскачка), внутрішня втулка якої закріплена на задній осі 4 нерухомо, в зборі - 5; ланцюг, що сполучає ведучу зірку правої педалі 2 і привідну зірочку 5, 6; ліве заднє колесо, що може обертатися на осі 5 вільно в обидва боки, в зборі - 7, праве заднє колесо, закріплене на цій же осі 4 нерухомо, в зборі - 8; і таким чином, привод виконується тільки на одне ліве заднє колесо. Принцип дії такого велосипеда відомий, велосипедист, обертаючи ногами педалі 2 і 3 вперед, передає за допомогою ланцюгової передачі - ведуча зірочка, ланцюг, привідна зірочка обертовий рух на привідну зірочку 5, при цьому, якщо швидкість обертання привідної зірочки 5 більша, ніж обертова швидкість задньої осі 4, то обгінна муфта заклинюється, і цей обертовий рух передається на вісь 4, а далі на ліве заднє колесо 8, яке і рухає велосипед вперед, перетворюючи обертовий рух на лінійний. Однак, якщо швидкість обертового руху відомої зірочки 5 менша, ніж осі 4, то обгінна муфта привідної зірочки 5 не заклинює, даючи можливість вільно обертатися задній осі 4, і велосипед рухається по інерції. Зазначимо, що такий привод в літературі називають заднім приводом на одне колесо, причому воно може бути як лівим, так і правим. Це найбільш дешева кінематична схема і найбільш поширена. Поставлена вище задача вирішується тим, в кінематичну схему, що містить вал каретки, закріплений з обох боків у втулці каретки за допомогою підшипників, в зборі, праву педаль з ведучою зіркою в зборі, задню вісь, закріплену на рамі за допомогою підшипників, в зборі, привідну зірочку з обгінною муфтою (типу тріскачка), внутрішня втулка якої встановлена на задній осі нерухомо, в зборі, ланцюг, що сполучає ведучу зірку правої педалі і привідну зірочку, ліве заднє колесо, що може обертатися на задній осі вільно в обидва боки, в зборі, праве заднє колесо, закріплене на цій же осі нерухомо, в зборі, додатково введено ліву педаль з ведучою зіркою в зборі, ліву привідну зірочку з обгінною муфтою (типу тріскачка) в зборі, лівий ланцюг, зірочку-сателіт та вал цієї зірочки. Ця кінематична схема представлена на фіг. 9 і містить в собі: вал каретки, закріплений з обох боків у втулці каретки за допомогою підшипників, в зборі - 1; праву педаль з ведучою зіркою в зборі - 2; задню вісь, закріплену на рамі за допомогою підшипників, в зборі - 4; привідну зірочку з обгінною муфтою (типу тріскачка), внутрішня втулка якої закріплена на задній осі 4 нерухомо, в зборі - 5; ланцюг, що сполучає ведучу зірку правої педалі 2 і привідну зірочку 5, 6; ліве заднє колесо, що може обертатися на осі 4 вільно в обидва боки, в зборі - 7, праве заднє колесо, закріплене на цій же осі 4 нерухомо, в зборі - 8; відрізняється тим, що додатково введено ліву педаль з ведучою зіркою, в зборі - 13; зірочку-сателіт - 9; вал - 10; лівий ланцюг - 11; ліву привідну зірочку з обгінною муфтою (типу тріскачка) в зборі - 12; при цьому ліву педаль з ведучою зіркою в зборі 13 встановлено на підшипниках на валу каретки 1 на місці лівої педалі 3 таким чином, що має можливість вільно обертатися на ньому, вал 10 закріплено нерухомо на рамі велосипеда під прямим кутом до валу каретки нерухомо, на якому встановлена зірочка-сателіт 9 таким чином, що має можливість обертатися вільно на ньому і знаходиться відповідно в постійному зчепленні з ведучою зіркою правої педалі 2 і ведучою зіркою лівої педалі 13, а ліву привідну зірочку з обгінною муфтою (типу тріскачка) в зборі 12 встановлено на задній осі 4 на такій відстані від привідної зірочки, що дорівнює відстані 2 UA 79112 U 5 10 15 20 25 30 35 40 45 50 55 між ведучими зірками правої педалі 2 i лівої педалі 13, при цьому внутрішня втулка муфти лівої привідної зірочки 12 закріплена на задній осі 4 нерухомо, а лівий ланцюг 11 сполучає ведучу зірку лівої педалі 13 з лівою привідною зірочкою 12 відповідно. Фіг. 9.1 - триколісний велосипед для перевозу вантажу з обертово-зворотним рухом педалей (довжина велосипеда - 1,76 м, ширина колії - 60 см, вага вантажу, що перевозиться - 100 кг). Кінематична схема працює таким чином. Велосипедист, обертаючи праву педаль 2 з верхньої вихідної точки до низу, тобто вперед, передає за допомогою ланцюгової передачі ведуча зірочка педалі 2, ланцюг 6, привідна зірочка 5 - обертовий рух на привідну зірочку 5, при цьому, якщо швидкість обертання привідної зірочки 5 більша, ніж обертова швидкість задньої осі 4, то обгінна муфта заклинюється, і цей обертовий рух передається на вісь 4, а далі на ліве заднє колесо 8, яке і рухає велосипед вперед, перетворюючи обертовий рух на лінійний. Однак, якщо швидкість обертового руху привідної зірочки 5 менша, ніж осі 4, то обгінна муфта привідної зірочки 5 та обгінна муфта лівої привідної зірочки 12 не заклинюють, даючи можливість вільно обертатися задній осі 4, і велосипед рухається по інерції. Далі, оскільки зірочка-сателіт 9 знаходиться в постійному зчеплені з ведучими зірочками правої педалі 2 і лівої педалі 13, то це зчеплення повертає ліву педаль 13 назад, оскільки ланцюгова передача - ведуча зірочка лівої педалі 13, лівий ланцюг 11, привідна зірочка 12 - повертає привідну зірочку 12 також назад і обгінна муфта цієї зірочки при такому русі теж не заклинює. Повертаючись зверху до низу (на пів оберту), права педаль 2 в кінці кінців займе свою нижню вихідну точку, а ліва педаль 13 зі своєї нижньої вихідної точки підніметься в гору в свою верхню вихідну точку. Так як далі давити на праву педаль 2 не має сенсу, оскільки нижня вихідна точка є мертвою, то велосипедист, щоб продовжити рух, змушений обертати тепер ліву педаль 13, обертовий рух тепер через ланцюгову передачу - ведуча зірочка лівої педалі 13, лівий ланцюг 11, ліва привідна зірочка 12, передається на ліву привідну зірочку 12, обгінна муфта якої заклиниться і передасть цей рух осі 4, а далі на ліве заднє колесо 8, яке і продовжить рух велосипеда. При досягненні лівою педаллю 13 своєї нижньої точки, зірочка-сателіт 9 поверне в верхню вихідну точку праву педаль 2. Таким чином, обертаючи по черзі на півоберту кожну із педалей, велосипед буде рухатися безперервно. З опису роботи такого приводу, видно, що обертати по колу педалі не треба, і звільняється задня частина зони обертання педалей (показано штрих пунктирною лінією на фіг. 2), де тепер вільно можна розмістити багажник, значно скоротивши довжину велосипеда в цілому. Психологічні дослідження даної моделі на предмет дискомфорту показали, що такий привод, встановлений на двоколісному велосипеді, на початковій стадії їзди на такому велосипеді викликав почуття тимчасової втрати рівноваги, переважно серед жінок, яке з часом проходило. Їзда на триколісному велосипеді з таким приводом серед різних вікових груп людей ніякого дискомфорту не викликала. Таким чином, поставлена задача вирішена. Кінематична схема створена на основі стандартних вузлів, що серійно випускаються в Україні, з незначною доробкою, що є економічно виправданим. Таку доробку може виконати будь-яка механічна майстерня, що має апарат для зварювання та токарний станок. Реальна діюча модель такого триколісного велосипеда приведена на фiг. 10. Кількість вузлів можна значно скоротити, якщо реверс педалей буде виконувати сам ланцюг без сателітної зірочки. Поставлена задача вирішується тим, в кінематичну схему, що містить праву педаль з ведучою зіркою в зборі, вал каретки, закріплений з обох боків у втулці каретки за допомогою підшипників в зборі, ліву педаль в зборі, ланцюг, задню вісь, закріплену на рамі за допомогою підшипників в зборі, привідну зірочку з обгінною муфтою (типу тріскачка) в зборі, ліве заднє колесо в зборі, праве заднє колесо в зборі, причому внутрішня втулка муфти привідної зірочки закріплена на задній осі нерухомо, праве заднє колесо теж закріплене на цій же осі нерухомо, а ліве заднє колесо може обертатися на осі вільно в обидва боки, ліву педаль з ведучою зіркою в зборі 13, закріплену на осі каретки за допомогою підшипників так, що може вільно обертатися, ліву привідну зірочку з обгінною муфтою (типу тріскачка) в зборі 12, яку встановлено на задній осі 5, в якій внутрішня втулка цієї муфти, закріплена на задній осі 5 нерухомо, в зборі 6; при цьому внутрішня втулка муфти лівої привідної зірочки 12 закріплена на задній осі 5 нерухомо, додатково лише подовжено в два рази ланцюг, який один сполучає як ведучі зірки, так і привідні зірочки. Ця кінематична схема представлена на фіг. 10 і містить в собі: вал каретки, закріплений з обох боків у втулці каретки за допомогою підшипників, в зборі - 1; праву педаль з ведучою зіркою в зборі - 2; 3 UA 79112 U 5 10 15 20 25 30 35 40 45 50 55 60 ліву педаль з ведучою зіркою, що встановлена на підшипниках на валу каретки 1 таким чином, що має можливість вільно обертатися на ньому, в зборі - 13; задню вісь, закріплену на рамі за допомогою підшипників, в зборі - 4; привідну зірочку з обгінною муфтою (типу тріскачка), внутрішня втулка якої закріплена на задній осі 4 нерухомо, в зборі - 5; ланцюг - 6; ліве заднє колесо, що може обертатися на осі 4 вільно в обидва боки, в зборі - 7, праве заднє колесо, закріплене на цій же осі 4 нерухомо, в зборі - 8; ліву привідну зірочку з обгінною муфтою (типу тріскачка), в якій внутрішня втулка цієї муфти закріплена на задній осі 4 нерухомо на такій відстані від привідної зірочки 5, що дорівнює відстані між ведучими зірками правої педалі 2 і лівої педалі 13, в зборі - 12; відрізняється тим, що ланцюг 6 подовжено в два рази і сполучено його з зірками так, що верхня точка ведучої зірочки лівої педалі 13 сполучена ланцюгом 6 з верхньою точкою привідної зірочки 5, нижня точка ведучої зірки лівої педалі 13 сполучена з верхньою точкою лівої привідної зірочки 12, нижня точка цієї зірочки 12 сполучається з нижньою точкою ведучої зірки правої педалі 2, а верхня точка цієї зірки правої педалі 2 сполучена з нижньою точкою привідної зірочки 6. Ця кінематична схема працює таким чином. З фіг. 10 видно, що, якщо повертати ліву педаль 13 вперед зверху до низу, то ланцюг 6 прийде в рух, який позначено на цьому рисунку стрілками, котрі показують, що права педаль 2 буде обертатися назад знизу до верху. Коли ліва педаль 13 займе нижню мертву точку, права педаль 2 займе верхню вихідну точку. Повертаючи тепер праву педаль 2 вперед, ліва педаль буде обертатися назад і, таким чином, реверс педалей, який виконувала в кінематичній схемі фіг. 9 зірочка - сателіт 9, досягається за рахунок спеціального сполучення ланцюга з ведучими зірками та привідними зірочками. В останньому робота цієї кінематичної схеми не відрізняється від роботи кінематичної схеми фіг. 9. Одною із вад кінематичних схем, що використовують привід на одне заднє колесо, є завчасний знос шини ведучого колеса. Для виправлення цієї ситуації використовують спеціальній задній міст з диференціалом, який позволяє здійснити привод на обидва колеса і ліквідувати різні швидкості задніх коліс при повороті. Однак такий пристрій є дорогим і практично в велосипедах не використовується. Кінематичні схеми, що пропонуються дозволяють ліквідувати ці вади нерівномірного зносу шин достатньо дешевим способом. Для цього розглянемо вузол задніх коліс окремо. Його кінематична схема зображена на фіг. 11 і містить: задню вісь, закріплену на рамі за допомогою підшипників, в зборі - 4; привідну зірочку з обгінною муфтою (типу тріскачка), внутрішня втулка якої закріплена на задній осі 4 нерухомо, в зборі - 5; ліве заднє колесо, що може обертатися на осі 4 вільно в обидва боки, в зборі - 7, праве заднє колесо, закріплене на цій же осі 4 нерухомо, в зборі - 8; ліву привідну зірочку з обгінною муфтою (типу тріскачка) в якій внутрішня втулка цієї муфти закріплена на задній осі 4 нерухомо на такій відстані від привідної зірочки 5, що дорівнює відстані між ведучими зірками правої педалі 2 і лівої педалі 13, в зборі - 12; Зауважимо, що на задній осі 4 закріплено дві привідні зірочки з обгінними муфтами. Якщо розділити вісь 4 навпіл і закріпити ліве заднє колесо 7 нерухомо на ліві тепер півосі, то тоді привідна зірочка 5 буде обертати праве заднє колесо 7, а ліва привідна зірочка ліве заднє колесо 8. А, оскільки, зірочки мають в своєму складі обгінні муфти, то ці муфти дозволяють мати колесам різні швидкості при поворотах велосипеда. Кінематична схема такого вузла задніх коліс, приведена на фіг. 12 і містить: привідну зірочку з обгінною муфтою (типу тріскачка) в зборі - 5; ліве заднє колесо в зборі - 7; праве заднє колесо в зборі - 8; ліву привідну зірочку з обгінною муфтою (типу тріскачка) в зборі - 12, відрізняється тим, що з метою ліквідації нерівномірного зносу шин задніх коліс додатково введено праву піввісь - 14, що закріплена до рами велосипеда з обох боків на підшипниках і має можливість обертатися в обидва боки, ліву піввісь - 15, що закріплена до рами велосипеда з обох боків на підшипниках і має можливість обертатися в обидва боки, при цьому на правому кінці правої півосі - 14 закріплено нерухомо праве заднє колесо 8, на лівому кінці цієї правої півосі - 14 закріплено нерухомо внутрішню втулку обгінної муфти привідної зірочки 5, на лівому кінці лівої півосі - 15 закріплено нерухомо внутрішню втулку обгінної муфти лівої привідної зірочки 12, а правому кінці лівої півосі - 15 закріплено нерухомо праве заднє колесо 8 відповідно. 4 UA 79112 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 20 25 30 35 1. Кінематична схема приводу вантажного триколісного велосипеда, що містить вал каретки, закріплений з обох боків у втулці каретки за допомогою підшипників, в зборі, праву педаль з ведучою зіркою в зборі, задню вісь, закріплену на рамі за допомогою підшипників, в зборі, привідну зірочку з обгінною муфтою (типу тріскачка), внутрішня втулка якої встановлена на задній осі нерухомо, в зборі, ланцюг, що сполучає ведучу зірку правої педалі і привідну зірочку, ліве заднє колесо, що може обертатися на задній осі вільно в обидва боки, в зборі, праве заднє колесо, закріплене на цій же задній осі нерухомо, в зборі, яка відрізняється тим, що додатково введено ліву педаль з ведучою зіркою, в зборі, зірочку-сателіт, вал, лівий ланцюг, ліву привідну зірочку з обгінною муфтою (типу тріскачка) в зборі, при цьому ліву педаль з ведучою зіркою в зборі встановлено на підшипниках на валу каретки на місці лівої педалі таким чином, що має можливість вільно обертатися на ньому, вал закріплено нерухомо на рамі велосипеда під прямим кутом до валу каретки нерухомо, на якому встановлена зірочка-сателіт таким чином, що має можливість обертатися вільно на ньому і знаходиться відповідно в постійному зчепленні з ведучою зіркою правої педалі і ведучою зіркою лівої педалі, а ліву привідну зірочку з обгінною муфтою (типу тріскачка) в зборі встановлено на задній осі на такій відстані від привідної зірочки, що дорівнює відстані між ведучими зірками правої педалі та лівої педалі, внутрішня втулка муфти лівої привідної зірочки закріплена на задній осі нерухомо, а лівий ланцюг сполучає ведучу зірку лівої педалі з лівою привідною зірочкою відповідно. 2. Кінематична схема приводу вантажного триколісного велосипеда за п. 1, яка відрізняється тим, що ланцюг подовжено в два рази і сполучено його з зірками так, що верхня точка ведучої зірочки лівої педалі сполучена ланцюгом з верхньою точкою привідної зірочки, нижня точка ведучої зірки лівої педалі сполучена з верхньою точкою лівої привідної зірочки, нижня точка цієї зірочки сполучається з нижньою точкою ведучої зірки правої педалі, а верхня точка цієї зірки правої педалі сполучена з нижньою точкою привідної зірочки, причому відстань між ведучими зірочками та привідними зірочками відповідно попарно дорівнює подвійній товщині ланцюга. 3. Кінематична схема приводу вантажного триколісного велосипеда за пп. 1, 2, яка відрізняється тим, що у вузол задніх коліс з метою ліквідації нерівномірного зносу шин задніх коліс додатково введено праву піввісь, що закріплена до рами велосипеда з обох боків на підшипниках і має можливість обертатися в обидва боки, ліву піввісь, що закріплена до рами велосипеда з обох боків на підшипниках і має можливість обертатися в обидва боки, при цьому на правому кінці правої півосі закріплено нерухомо праве заднє колесо, на лівому кінці цієї правої півосі закріплено нерухомо внутрішню втулку обгінної муфти привідної зірочки, на лівому кінці лівої півосі закріплено нерухомо внутрішню втулку обгінної муфти лівої привідної зірочки, а правому кінці лівої півосі закріплено нерухомо праве заднє колесо відповідно. 5 UA 79112 U 6 UA 79112 U 7 UA 79112 U 8 UA 79112 U 9 UA 79112 U 10 UA 79112 U Комп’ютерна верстка Л. Купенко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 11
ДивитисяДодаткова інформація
Назва патенту англійськоюKinematic diagram of cargo tricycle drive
Автори англійськоюSemotiuk Myroslav Vasyliovych, Semotiuk Vitalii Myroslavovych
Назва патенту російськоюКинематическая схема привода грузового трехколесного велосипеда
Автори російськоюСемотюк Мирослав Васильевич, Семотюк Виталий Мирославович
МПК / Мітки
МПК: B62K 17/00, B62M 29/00
Мітки: триколісного, приводу, вантажного, схема, велосипеда, кінематична
Код посилання
<a href="https://ua.patents.su/13-79112-kinematichna-skhema-privodu-vantazhnogo-trikolisnogo-velosipeda.html" target="_blank" rel="follow" title="База патентів України">Кінематична схема приводу вантажного триколісного велосипеда</a>
Привід велосипеда
Номер патенту: 52502
Опубліковано: 25.08.2010
Автор: Подлісецький Олександр Семенович
МПК: B62M 1/00
Мітки: велосипеда, привід
Формула / Реферат:
Привід велосипеда, що містить педалі, з'єднані з ведучим зубчатим колесом, ведене зубчате колесо, що перебуває на одній осі з обгінною муфтою й заднім колесом, який відрізняється тим, що педалі закріплені до рейок, що мають косі зуби, рейки встановлені із двох сторін від зубчатого колеса й перебувають із ним у зачепленні, причому зубчате колесо жорстко з'єднане з первинним валом, який має можливість вільно обертатися і переміщатися вздовж...
Привід велосипеда

Номер патенту: 96829
Опубліковано: 12.12.2011
Автор: Подлісецький Олександр Семенович
МПК: F16H 19/00, B62M 17/00, F16H 3/22, B62M 1/00
Мітки: привід, велосипеда
Формула / Реферат:
Привід велосипеда, що містить педалі, з'єднані з ведучим зубчастим колесом, ведене зубчасте колесо, що розташоване на одній осі з обгінною муфтою й заднім колесом, який відрізняється тим, що педалі закріплені до рейок, що мають косі зуби, рейки встановлені із двох боків від косозубого колеса й перебувають із ним у зачепленні з можливістю зворотно-поступального руху, причому косозубе колесо жорстко з'єднане з первинним валом, який має...
Привід віф-віф велосипеда
Номер патенту: 51045
Опубліковано: 15.11.2002
Автор: Фещенко Володимир Ілліч
МПК: B62M 1/00
Мітки: віф-віф, привід, велосипеда
Формула / Реферат:
1. Привід велосипеда, до якого входять педалі, важелі педалей, ведуча та ведена зірочка, ланцюгова передача, який відрізняється тим, що він виконаний з коливальними важелями педалей на підшипниках, що встановлені на перехідниках, закріплених на зовнішніх кінцях втулки, всередині якої на підшипниках розташований вал, на якому закріплені ведучі диски та ведуча зірочка приводу, на важелях педалей закріплені маточини, між ними та ведучими дисками...
Додатковий електропривід велосипеда
Номер патенту: 16987
Опубліковано: 15.09.2006
Автори: Музиченко Ольга Валеріївна, Педь Валерій Вікторович
Мітки: електропривід, додатковий, велосипеда
Формула / Реферат:
Додатковий електропривід велосипеда, що містить акумулятор електричної енергії, електродвигун, вихідний вал якого кінематично зв'язаний з приводом колеса за допомогою обгінної муфти, пристрій керування приводом, який відрізняється тим, що акумулятор і електродвигун закріплено над заднім колесом, а вал електродвигуна з'єднаний з редуктором, на вихідному валу якого встановлена зірочка, що зв'язана ланцюгом із зірочкою, з'єднаною з обгінною...
Кінематична схема веломобіля з ручним приводом і управлінням
Номер патенту: 93848
Опубліковано: 10.03.2011
Автор: Чернов Валерій Павлович
МПК: B62K 5/00, B62K 23/00, B62K 21/00
Мітки: управлінням, веломобіля, кінематична, приводом, ручним, схема
Формула / Реферат:
1. Кінематична схема веломобіля з ручним приводом і управлінням, що включає підсистему управління у складі керма, тягової системи, підсистему приводу в складі керма, хитного важеля, який кріпиться на осі, жорстко пов'язаній з рамою, вузла захоплення важелем тягового ланцюга, ланцюга, розтягнутого на двох зубчатках, коліс приводу з тріскачкою, яка відрізняється тим, що підсистема управління включає кермо 1, пов'язане з верхнім кожухом 2...