Сенсорний пристрій для визначення місцеположення та моментів інерції об’єкта
Формула / Реферат
1. Сенсорний пристрій для визначення місцеположення та моментів інерції об'єкта, який складається з сенсорної матриці, блоків обчислення моментів рядків і обчислення моментів колонок, мікропроцесора, перший вихід якого через цифро-аналоговий перетворювач підключений до третього входу "Поріг" сенсорної матриці, а другий вихід мікропроцесора підключений до другого входу "Скид" сенсорної матриці, третій вихід мікропроцесора підключений до першого входу "Зсув вліво" сенсорної матриці, четвертий вихід мікропроцесора підключений до четвертого входу "Зсув вниз" сенсорної матриці, а п'ятий вихід мікропроцесора підключений до п'ятого входу "Бінаризація" сенсорної матриці, шостий вхід сенсорної матриці є входом світлового потоку, виходи рядків сенсорної матриці підключені на перші входи блока обчислення моментів рядків, а виходи колонок сенсорної матриці підключені до перших входів блока обчислення моментів колонок, виходи блоків обчислення моментів рядків і обчислення моментів колонок підключені до першого і другого входів мікропроцесора відповідно, керуючі входи блоків обчислення моментів рядків та обчислення моментів колонок підключені відповідно до шостого і сьомого виходів мікропроцесора відповідно, десятий вихід мікропроцесора є виходом пристрою, який відрізняється тим, що пристрій додатково містить блоки формування відстаней по рядках і формування відстаней по колонках, другі входи блоків обчислення моментів рядків та обчислення моментів колонок підключені до виходів блоків формування відстаней по рядках та формування відстаней по колонках відповідно, вхід блока формування відстаней по рядках підключений до третього виходу мікропроцесора та першого входу "Зсув вліво" сенсорної матриці, а вхід блока формування відстаней по колонках підключений до четвертого виходу мікропроцесора та четвертого входу "Зсув вниз" сенсорної матриці, восьмий та дев'ятий виходи мікропроцесора з'єднані з керуючими входами блоків формування відстаней по рядках та формування відстаней по колонках відповідно.
2. Пристрій за п. 1, який відрізняється тим, що сенсорна матриця складається з МхN елементів, причому виходи правих елементів матриці зв'язані з інформаційними входами сусідніх лівих елементів у рядках, а виходи крайніх лівих елементів у рядках зв'язані з інформаційними входами крайніх правих елементів відповідно, а також з виходами рядків сенсорної матриці, виходи верхніх елементів у колонках зв'язані з інформаційними входами нижніх елементів колонок, а виходи самих нижніх елементів у колонках зв'язані відповідно з інформаційними входами самих верхніх у колонках елементів, а також зв'язані з виходами колонок сенсорної матриці, перші, другі, треті, четверті та п'яті керуючі входи елементів відповідно об'єднані та підключені до першого входу "Зсув вліво", другого входу "Скид", третього входу "Поріг", четвертого входу "Зсув вниз", п'ятого входу "Бінаризація" сенсорної матриці відповідно.
3. Пристрій за п. 2, який відрізняється тим, що кожний елемент сенсорної матриці має фотосенсор, управляючий вхід якого підключений до другого входу "Скид" сенсорної матриці, а вихід підключений до першого входу порогового елемента, другий вхід якого з'єднаний з третім входом сенсорної матриці "Поріг", вихід порогового елемента та виходи сусідніх елементів зліва і зверху сенсорної матриці підключені відповідно до першого, другого та третього інформаційних входів логічного елемента І-АБО, керуючі входи яких з'єднані з п'ятим входом "Бінаризація", четвертим входом "Зсув вниз" та першим входом "Зсув вліво" сенсорної матриці відповідно, вихід логічного елемента І-АБО підключений до одиничного входу тригера, вихід якого підключений до входів сусідніх лівого та нижнього елементів сенсорної матриці.
4. Пристрій за п. 1, який відрізняється тим, що блок обчислення моментів рядків складається з N суматорів-накопичувачів, входи яких через перші групи елементів І зв'язані через загальну шину з першим входом блока обчислення моментів рядків, а виходи суматорів-накопичувачів через другі групи елементів І зв'язані через загальну шину з виходом блока обчислення моментів рядків, керуючі входи першої групи елементів І зв'язані відповідно з виходами рядків, а також регістра зсуву, входи якого підключені до керуючого входу блока обчислення моментів рядків, а виходи підключені до керуючих входів других груп елементів І відповідно.
5. Пристрій за п. 1, який відрізняється тим, що блок формування відстаней по рядках складається з лічильника, виходи якого з'єднані із входом суматора-накопичувача із зсувом на один розряд в сторону старших розрядів та першим входом комутатора, вихід суматора-накопичувача з'єднаний з другим входом комутатора, вихід якого є виходом блока, керуючий вхід комутатора підключений до керуючого входу блока формування відстаней по рядках, вхід тактових імпульсів блока формування відстаней по рядках підключений до вільного молодшого розряду суматора-накопичувача та його керуючого входу, а також через елемент затримки до входу лічильника.
Текст
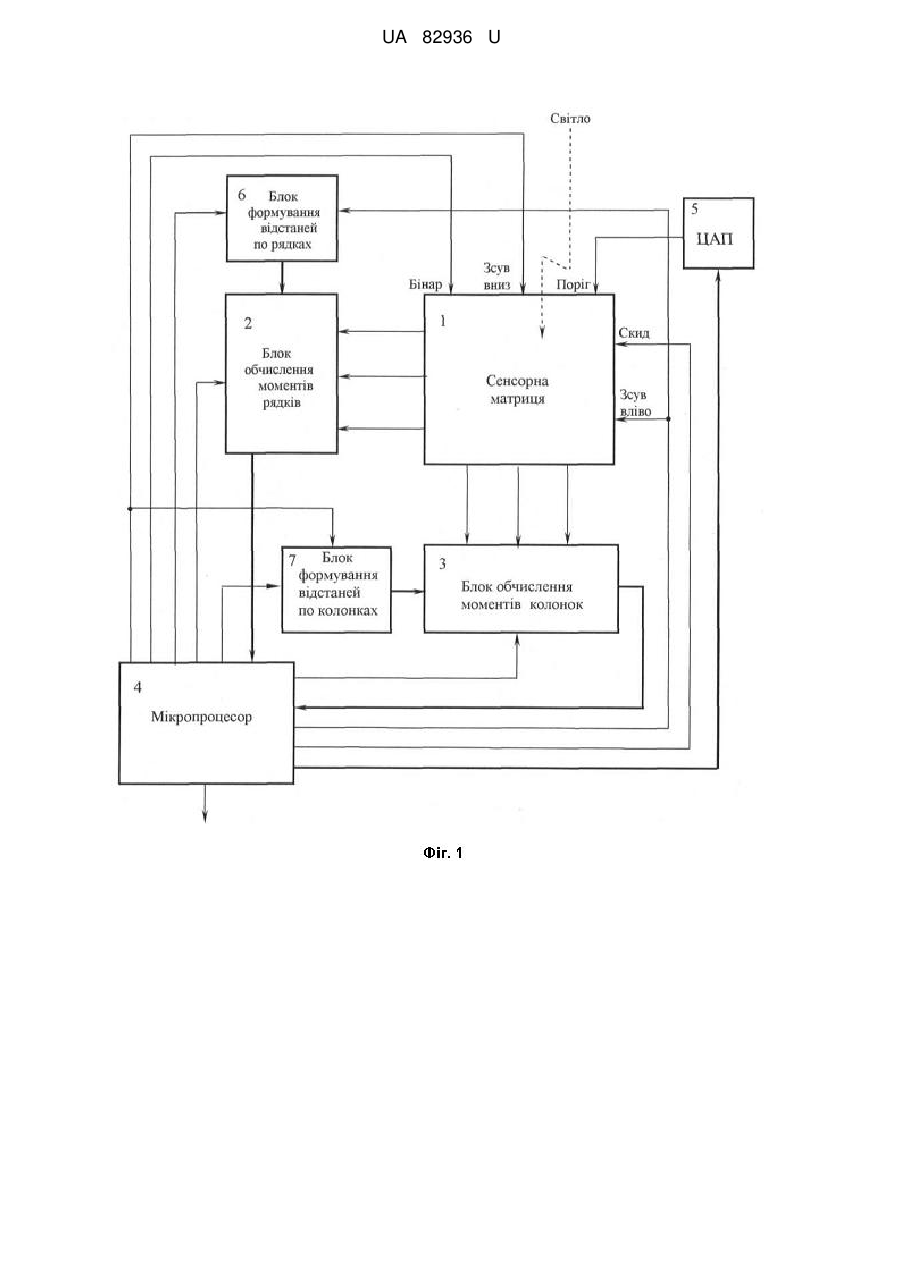
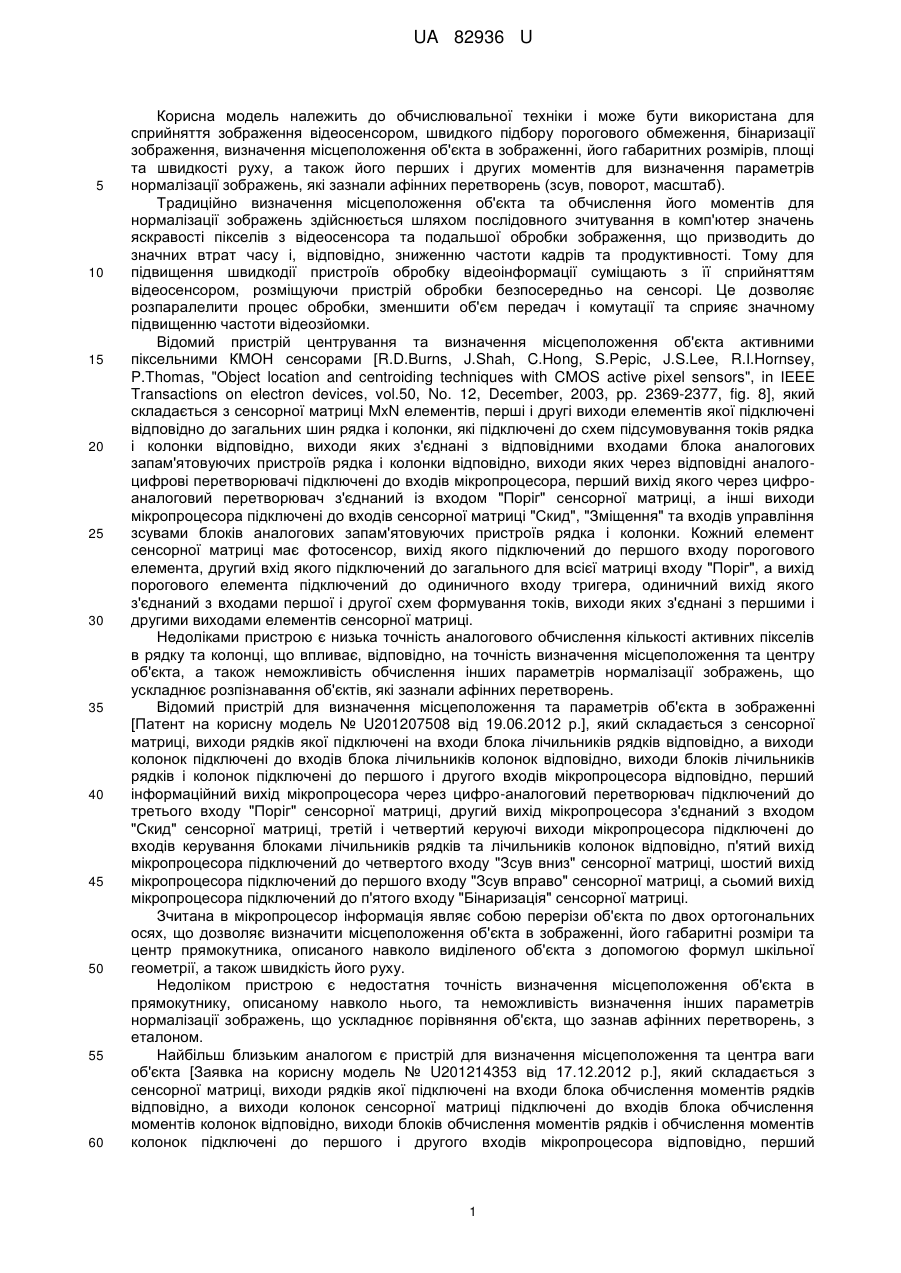
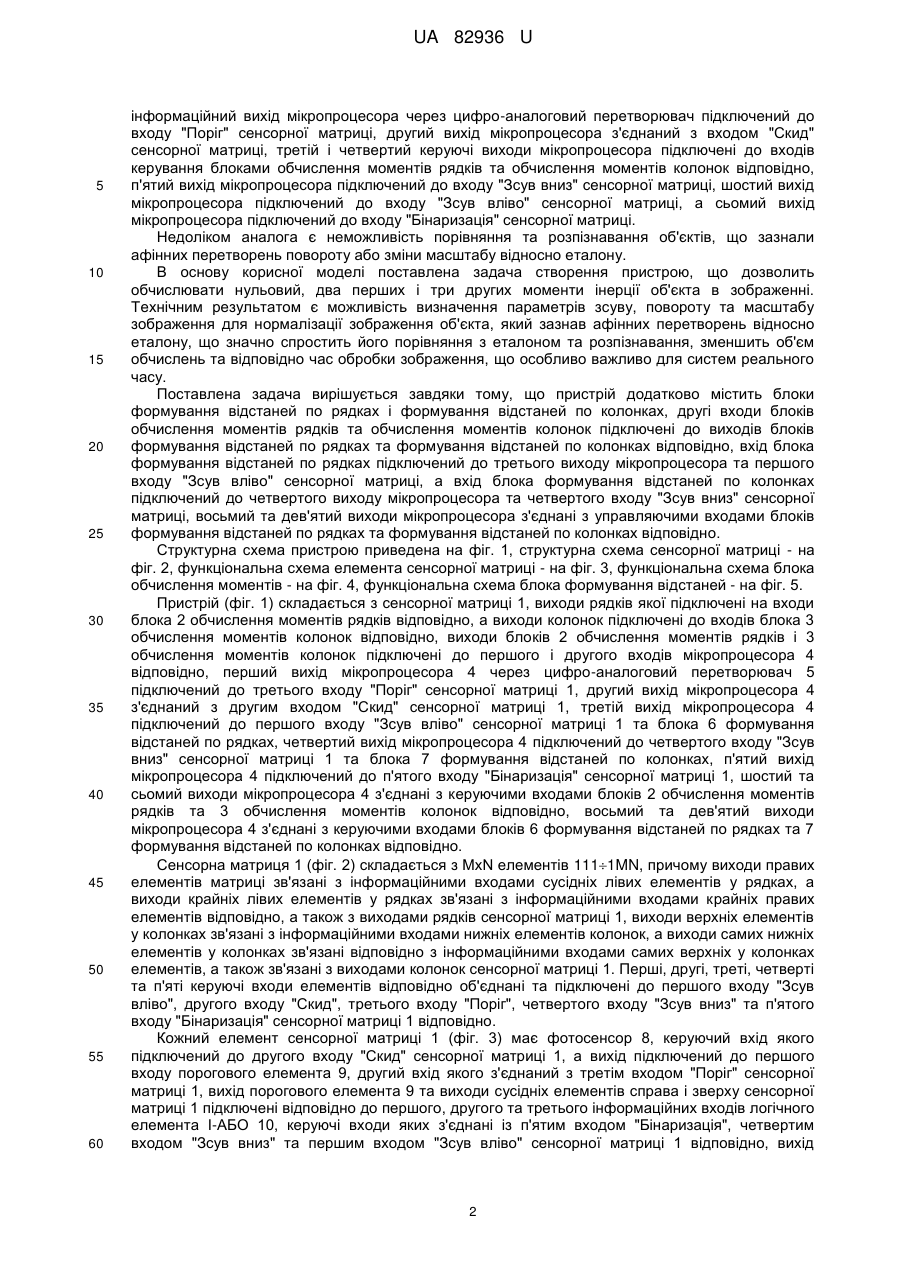
Реферат: UA 82936 U UA 82936 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до обчислювальної техніки і може бути використана для сприйняття зображення відеосенсором, швидкого підбору порогового обмеження, бінаризації зображення, визначення місцеположення об'єкта в зображенні, його габаритних розмірів, площі та швидкості руху, а також його перших і других моментів для визначення параметрів нормалізації зображень, які зазнали афінних перетворень (зсув, поворот, масштаб). Традиційно визначення місцеположення об'єкта та обчислення його моментів для нормалізації зображень здійснюється шляхом послідовного зчитування в комп'ютер значень яскравості пікселів з відеосенсора та подальшої обробки зображення, що призводить до значних втрат часу і, відповідно, зниженню частоти кадрів та продуктивності. Тому для підвищення швидкодії пристроїв обробку відеоінформації суміщають з її сприйняттям відеосенсором, розміщуючи пристрій обробки безпосередньо на сенсорі. Це дозволяє розпаралелити процес обробки, зменшити об'єм передач і комутації та сприяє значному підвищенню частоти відеозйомки. Відомий пристрій центрування та визначення місцеположення об'єкта активними піксельними КМОН сенсорами [R.D.Burns, J.Shah, C.Hong, S.Pepic, J.S.Lee, R.I.Hornsey, P.Thomas, "Object location and centroiding techniques with CMOS active pixel sensors", in ІЕЕЕ Transactions on electron devices, vol.50, No. 12, December, 2003, pp. 2369-2377, fig. 8], який складається з сенсорної матриці MxN елементів, перші і другі виходи елементів якої підключені відповідно до загальних шин рядка і колонки, які підключені до схем підсумовування токів рядка і колонки відповідно, виходи яких з'єднані з відповідними входами блока аналогових запам'ятовуючих пристроїв рядка і колонки відповідно, виходи яких через відповідні аналогоцифрові перетворювачі підключені до входів мікропроцесора, перший вихід якого через цифроаналоговий перетворювач з'єднаний із входом "Поріг" сенсорної матриці, а інші виходи мікропроцесора підключені до входів сенсорної матриці "Скид", "Зміщення" та входів управління зсувами блоків аналогових запам'ятовуючих пристроїв рядка і колонки. Кожний елемент сенсорної матриці має фотосенсор, вихід якого підключений до першого входу порогового елемента, другий вхід якого підключений до загального для всієї матриці входу "Поріг", а вихід порогового елемента підключений до одиничного входу тригера, одиничний вихід якого з'єднаний з входами першої і другої схем формування токів, виходи яких з'єднані з першими і другими виходами елементів сенсорної матриці. Недоліками пристрою є низька точність аналогового обчислення кількості активних пікселів в рядку та колонці, що впливає, відповідно, на точність визначення місцеположення та центру об'єкта, а також неможливість обчислення інших параметрів нормалізації зображень, що ускладнює розпізнавання об'єктів, які зазнали афінних перетворень. Відомий пристрій для визначення місцеположення та параметрів об'єкта в зображенні [Патент на корисну модель № U201207508 від 19.06.2012 р.], який складається з сенсорної матриці, виходи рядків якої підключені на входи блока лічильників рядків відповідно, а виходи колонок підключені до входів блока лічильників колонок відповідно, виходи блоків лічильників рядків і колонок підключені до першого і другого входів мікропроцесора відповідно, перший інформаційний вихід мікропроцесора через цифро-аналоговий перетворювач підключений до третього входу "Поріг" сенсорної матриці, другий вихід мікропроцесора з'єднаний з входом "Скид" сенсорної матриці, третій і четвертий керуючі виходи мікропроцесора підключені до входів керування блоками лічильників рядків та лічильників колонок відповідно, п'ятий вихід мікропроцесора підключений до четвертого входу "Зсув вниз" сенсорної матриці, шостий вихід мікропроцесора підключений до першого входу "Зсув вправо" сенсорної матриці, а сьомий вихід мікропроцесора підключений до п'ятого входу "Бінаризація" сенсорної матриці. Зчитана в мікропроцесор інформація являє собою перерізи об'єкта по двох ортогональних осях, що дозволяє визначити місцеположення об'єкта в зображенні, його габаритні розміри та центр прямокутника, описаного навколо виділеного об'єкта з допомогою формул шкільної геометрії, а також швидкість його руху. Недоліком пристрою є недостатня точність визначення місцеположення об'єкта в прямокутнику, описаному навколо нього, та неможливість визначення інших параметрів нормалізації зображень, що ускладнює порівняння об'єкта, що зазнав афінних перетворень, з еталоном. Найбільш близьким аналогом є пристрій для визначення місцеположення та центра ваги об'єкта [Заявка на корисну модель № U201214353 від 17.12.2012 р.], який складається з сенсорної матриці, виходи рядків якої підключені на входи блока обчислення моментів рядків відповідно, а виходи колонок сенсорної матриці підключені до входів блока обчислення моментів колонок відповідно, виходи блоків обчислення моментів рядків і обчислення моментів колонок підключені до першого і другого входів мікропроцесора відповідно, перший 1 UA 82936 U 5 10 15 20 25 30 35 40 45 50 55 60 інформаційний вихід мікропроцесора через цифро-аналоговий перетворювач підключений до входу "Поріг" сенсорної матриці, другий вихід мікропроцесора з'єднаний з входом "Скид" сенсорної матриці, третій і четвертий керуючі виходи мікропроцесора підключені до входів керування блоками обчислення моментів рядків та обчислення моментів колонок відповідно, п'ятий вихід мікропроцесора підключений до входу "Зсув вниз" сенсорної матриці, шостий вихід мікропроцесора підключений до входу "Зсув вліво" сенсорної матриці, а сьомий вихід мікропроцесора підключений до входу "Бінаризація" сенсорної матриці. Недоліком аналога є неможливість порівняння та розпізнавання об'єктів, що зазнали афінних перетворень повороту або зміни масштабу відносно еталону. В основу корисної моделі поставлена задача створення пристрою, що дозволить обчислювати нульовий, два перших і три других моменти інерції об'єкта в зображенні. Технічним результатом є можливість визначення параметрів зсуву, повороту та масштабу зображення для нормалізації зображення об'єкта, який зазнав афінних перетворень відносно еталону, що значно спростить його порівняння з еталоном та розпізнавання, зменшить об'єм обчислень та відповідно час обробки зображення, що особливо важливо для систем реального часу. Поставлена задача вирішується завдяки тому, що пристрій додатково містить блоки формування відстаней по рядках і формування відстаней по колонках, другі входи блоків обчислення моментів рядків та обчислення моментів колонок підключені до виходів блоків формування відстаней по рядках та формування відстаней по колонках відповідно, вхід блока формування відстаней по рядках підключений до третього виходу мікропроцесора та першого входу "Зсув вліво" сенсорної матриці, а вхід блока формування відстаней по колонках підключений до четвертого виходу мікропроцесора та четвертого входу "Зсув вниз" сенсорної матриці, восьмий та дев'ятий виходи мікропроцесора з'єднані з управляючими входами блоків формування відстаней по рядках та формування відстаней по колонках відповідно. Структурна схема пристрою приведена на фіг. 1, структурна схема сенсорної матриці - на фіг. 2, функціональна схема елемента сенсорної матриці - на фіг. 3, функціональна схема блока обчислення моментів - на фіг. 4, функціональна схема блока формування відстаней - на фіг. 5. Пристрій (фіг. 1) складається з сенсорної матриці 1, виходи рядків якої підключені на входи блока 2 обчислення моментів рядків відповідно, а виходи колонок підключені до входів блока 3 обчислення моментів колонок відповідно, виходи блоків 2 обчислення моментів рядків і 3 обчислення моментів колонок підключені до першого і другого входів мікропроцесора 4 відповідно, перший вихід мікропроцесора 4 через цифро-аналоговий перетворювач 5 підключений до третього входу "Поріг" сенсорної матриці 1, другий вихід мікропроцесора 4 з'єднаний з другим входом "Скид" сенсорної матриці 1, третій вихід мікропроцесора 4 підключений до першого входу "Зсув вліво" сенсорної матриці 1 та блока 6 формування відстаней по рядках, четвертий вихід мікропроцесора 4 підключений до четвертого входу "Зсув вниз" сенсорної матриці 1 та блока 7 формування відстаней по колонках, п'ятий вихід мікропроцесора 4 підключений до п'ятого входу "Бінаризація" сенсорної матриці 1, шостий та сьомий виходи мікропроцесора 4 з'єднані з керуючими входами блоків 2 обчислення моментів рядків та 3 обчислення моментів колонок відповідно, восьмий та дев'ятий виходи мікропроцесора 4 з'єднані з керуючими входами блоків 6 формування відстаней по рядках та 7 формування відстаней по колонках відповідно. Сенсорна матриця 1 (фіг. 2) складається з МхN елементів 1111MN, причому виходи правих елементів матриці зв'язані з інформаційними входами сусідніх лівих елементів у рядках, а виходи крайніх лівих елементів у рядках зв'язані з інформаційними входами крайніх правих елементів відповідно, а також з виходами рядків сенсорної матриці 1, виходи верхніх елементів у колонках зв'язані з інформаційними входами нижніх елементів колонок, а виходи самих нижніх елементів у колонках зв'язані відповідно з інформаційними входами самих верхніх у колонках елементів, а також зв'язані з виходами колонок сенсорної матриці 1. Перші, другі, треті, четверті та п'яті керуючі входи елементів відповідно об'єднані та підключені до першого входу "Зсув вліво", другого входу "Скид", третього входу "Поріг", четвертого входу "Зсув вниз" та п'ятого входу "Бінаризація" сенсорної матриці 1 відповідно. Кожний елемент сенсорної матриці 1 (фіг. 3) має фотосенсор 8, керуючий вхід якого підключений до другого входу "Скид" сенсорної матриці 1, а вихід підключений до першого входу порогового елемента 9, другий вхід якого з'єднаний з третім входом "Поріг" сенсорної матриці 1, вихід порогового елемента 9 та виходи сусідніх елементів справа і зверху сенсорної матриці 1 підключені відповідно до першого, другого та третього інформаційних входів логічного елемента І-АБО 10, керуючі входи яких з'єднані із п'ятим входом "Бінаризація", четвертим входом "Зсув вниз" та першим входом "Зсув вліво" сенсорної матриці 1 відповідно, вихід 2 UA 82936 U 5 10 15 20 25 логічного елемента І-АБО 10 підключений до одиничного входу тригера 11, вихід якого підключений до входів сусідніх лівого та нижнього елементів сенсорної матриці 1. Блок 2 обчислення моментів рядків (фіг. 4) складається з N суматорів-накопичувачів 12, входи яких через перші групи елементів І 13 зв'язані через загальну шину з першим входом блока 2 обчислення моментів рядків, а виходи суматорів-накопичувачів 12 через другі групи елементів І 14 зв'язані через загальну шину з виходом блока 2 обчислення моментів рядків, керуючі входи першої групи елементів І 13 зв'язані з виходами рядків сенсорної матриці 1 відповідно, а також регістра зсуву 15, вхід якого підключений до керуючого входу блока 2 обчислення моментів рядків, а виходи підключені до керуючих входів других груп елементів І 14 відповідно. Блок 3 обчислення моментів колонок аналогічний блоку 2 обчислення моментів рядків, тільки він містить М суматорів-накопичувачів 12 та стільки ж перших груп елементів І 13 та других груп елементів І 14. Блок 6 формування відстаней по рядках складається з лічильника 16, виходи якого з'єднані із входом суматора-накопичувача 17 із зсувом на один розряд в сторону старших розрядів та першим входом комутатора 18, вихід суматора-накопичувача 17 з'єднаний з другим входом комутатора 18, вихід якого є виходом блока 6 формування відстаней по рядках, керуючий вхід комутатора 18 підключений до керуючого входу блока 6 формування відстаней по рядках, вхід тактових імпульсів (ТІ) блока 6 формування відстаней по рядках підключений до вільного молодшого розряду суматора-накопичувача 17 та його керуючого входу, а також через елемент затримки (ЕЗ) 19 до входу лічильника 16. Блок 7 формування відстаней по колонках аналогічний блоку 6 формування відстаней по рядках. Моменти інерції зображення обчислюються звичайно по наступних формулах: N M - нульовий момент m00 1 I x j , y i , MN i 1 j 1 де I x j, y i - яскравість елементів сенсорної матриці, являє собою середнє значення яскравості, а для бінаризованого зображення - кількість активних елементів в зображенні відносно загальної кількості елементів в зображенні; - перші моменти: m10 1 N M I x j, yi x j , MN i 1 j 1 m01 30 1 N M I x j, yi yi , MN i 1 j 1 представляють координати центра ваги об'єкта; - другі моменти: m20 40 45 m02 1 N M I x j, yi xi2 , MN i 1 j 1 m11 35 1 N M I x j, yi x 2 , j MN i 1 j 1 1 N M I x j, yi x j yi MN i 1 j 1 дають інформацію для визначення параметрів повороту та масштабу для нормалізації зображення об'єкта, що зазнав афінних перетворень. Для бінаризованого зображення операція множення замінюється логічною операцією І, а одиничні значення активних пікселів сенсорної матриці використовуються для керування підсумовуванням відстаней, тобто обчислюється сума та сума квадратів відстаней активних елементів сенсорної матриці від лівого краю по рядках та від нижнього краю - по колонках, а також сума додатків відстаней по рядках і колонках. Робота пристрою полягає в наступному. Мікропроцесор 4 (фіг. 1) через цифро-аналоговий перетворювач (ЦАП) 5 встановлює заданий поріг на третій вхід "Поріг" сенсорної матриці 1, проводить початковий скид елементів сенсорної матриці 1 по другому входу "Скид" та встановлює команду "Бінаризація" на п'ятий вхід сенсорної матриці 1, після чого фотосенсори 8 (фіг. 3) елементів сенсорної матриці 1 починають реєструвати інтенсивність світла, яке попадає 3 UA 82936 U 5 10 від сцени, яка на них проектується. Якщо за встановлений час експозиції напруга на фотосенсорі 8 досягла порогового рівня або перевищила його, спрацьовує пороговий елемент 9 і видає одиничний сигнал на перший інформаційний вхід логічного елемента І-АБО 10, який при наявності керуючого сигналу "Бінаризація" на вході сенсорної матриці 1 встановлює тригер 11 сенсорного елемента в одиничний стан. Після закінчення часу експозиції мікропроцесор 4 (фіг. 1) знімає сигнал "Бінаризація" з п'ятого входу сенсорної матриці 1 і видає тактові імпульси на вхід блока 6 формування відстаней по рядках та перший вхід "Зсув вліво" сенсорної матриці 1, в результаті чого лічильник 16 блока 6 формування відстаней по рядках (рис. 5) підраховує кількість імпульсів, що надійшли на його вхід, а з допомогою суматора-накопичувача 17 та елемента затримки (ЕЗ) 19 блока 6 формування відстаней по рядках здійснюється обчислення квадрата від кількості імпульсів, що надійшли на вхід лічильника 16. Тут використовуються відомі математичні підходи представлення квадрата числової послідовності у вигляді суми ряду непарних чисел, зокрема: y x2 x 1 2i 1 , i0 15 20 25 30 35 40 45 50 55 в рекурентному вигляді алгоритм запишеться як xi1 xi 1 , y xi2 1 xi2 2xi 1 . Кількість імпульсів в числовій послідовності підраховується з допомогою лічильника 16, а її квадрат формується в суматорі-накопичувачі 17 блока 6 формування відстаней по рядках (рис. 5). Для цього кожен імпульс послідовності добавляє до вмісту суматора-накопичувача 17 одиницю та зсунуте на один розряд (тобто подвоєне) значення кількості імпульсів, підрахованих лічильником 16. Таким чином, в лічильнику 16 формуються значення відстаней від лівого краю сенсорної матриці 1, а в суматорі-накопичувачі 17 - значення квадратів цих відстаней. Сигнал з восьмого виходу мікропроцесора 4 на керуючий вхід комутатора 18 підключає на вихід блока 6 формування відстаней по рядках або вихід лічильника 16 (значення відстаней) або вихід суматора-накопичувача 17 (значення квадратів відстаней). Аналогічно працює блок 7 формування відстаней по колонках, формуючи відстані та їх квадрати від нижнього краю сенсорної матриці 1. Послідовність дій по обчисленню моментів можна представити наступним чином. Для обчислення першого моменту по координаті X мікропроцесор по третьому виходу видає тактові імпульси на вхід блока 6 формування відстаней по рядках, які підсумовуються лічильником 16 блока 6 (фіг. 5). При цьому мікропроцесор 4 по восьмому виходу переключає комутатор 18 блока 6 формування відстаней по рядках для видачі вмісту лічильника 16 на вхід блока 2 обчислення моментів рядків. Одночасно тактові імпульси з третього виходу мікропроцесора 4 здійснюють зсув вмісту елементів сенсорної матриці 1 вліво. Під керуванням сигналів з виходів рядків сенсорної матриці 1 здійснюється передача відстаней з виходу комутатора 18 блока 6 формування відстаней по рядках, якщо відповідні їх елементи були активними, через групи елементів І 13 (фіг. 4) в суматори-накопичувачі 12 блока 2 обчислення моментів рядків та перезапис інформації в тригери 11 (фіг. 3) від сусідніх правих сенсорних елементів вздовж рядків матриці 1. Таким чином в суматорах-накопичувачах 12 блока 2 обчислення моментів по рядках накопичується сума відстаней активних елементів в рядках сенсорної матриці 1 від її лівого краю відповідно. Завдяки кільцевим зв'язкам між елементами сенсорної матриці 1 (фіг. 2) інформація в тригерах 11 (фіг. 3) рядків сенсорної матриці відновлюється. Після накопичення відстаней активних елементів сенсорної матриці 1 від лівого краю в суматорах-накопичувачах 12 блока 2 обчислення моментів по рядках матриці мікропроцесор 4 своїми тактовими імпульсами по шостому виходу здійснює зсув, записаної одиниці в регістрі 15 зсуву блока 2 обчислення моментів по рядках матриці, яка послідовно відкриває другі групи елементів І 14. При цьому вміст суматорів-накопичувачів 12 блока 2 обчислення моментів по рядках послідовно передається по загальній шині в мікропроцесор 4, який здійснює їх підсумовування. Отримана сума і є моментом інерції по координаті X. Аналогічно вище приведеному запускається блок 7 формування відстаней по колонках та проводиться зсув елементів сенсорної матриці 1 вниз. При цьому, під керуванням сигналів з виходів колонок сенсорної матриці 1 здійснюється передача через групи елементів І 13 вмісту блока 7 формування відстаней по рядках для відповідних активних пікселів сенсорної матриці 1 в суматори-накопичувачі 12 блока 3 обчислення моментів колонок. Таким чином в суматорахнакопичувачах 12 блока 3 обчислення моментів колонок (фіг. 4) накопичується сума відстаней активних елементів в рядках сенсорної матриці 1 від її нижнього краю відповідно. Аналогічно обчислюється момент інерції по координаті Y, тобто по колонках. 4 UA 82936 U 5 10 15 20 25 30 35 40 45 50 55 60 Для обчислення другого моменту по координаті X, аналогічно описаному вище, по восьмому виходу мікропроцесора 4 видаються тактові імпульси на вхід блока 6 формування відстаней по рядках та на зсув вмісту елементів сенсорної матриці 1 вліво. При цьому мікропроцесор 4 переключає комутатор 18 блока 6 формування відстаней по рядках на видачу інформації з суматора-накопичувача 17, в якому формуються квадрати відстаней по рядках. Аналогічно описаному вище під керуванням виходів рядків сенсорної матриці 1 блок 2 обчислення моментів рядків здійснює обчислення других моментів рядків сенсорної матриці 1. Аналогічно описаному для обчислення перших моментів рядків, здійснюється передача других моментів рядків в мікропроцесор 4 для їх підсумовування. В результаті підсумовування в мікропроцесорі 4 формується другий момент інерції об'єкта по координаті X. Аналогічно обчислюється другий момент інерції по координаті Y з допомогою блока 7 формування відстаней по колонках та блока 2 обчислення моментів рядків. Для обчислення моменту другого порядку m11 використовуються моменти першого порядку, наприклад по рядках m10, що обчислені в блоці 2 обчислення моментів рядків, які при послідовній передачі в мікропроцесор 4 домножуються в ньому на відстані yi по колонках та підсумовуються. Для обчислення нульового моменту необхідно в блок 6 формування відстаней по рядках занести з мікропроцесора 4 "одиницю" і не проводити підрахунок відстаней. В цьому випадку суматори-накопичувачі 12 (фіг. 4) блока 2 обчислення моментів рядків матриці підрахують кількість активних пікселів в рядках сенсорної матриці 1. Аналогічно обчислюється кількість активних пікселів в колонках сенсорної матриці 1 з допомогою блока 7 формування відстаней по колонках та суматорів-накопичувачів 12 блока 3 обчислення моментів в колонках матриці. Отримані суми повинні співпасти, що може служити для перевірки правильності функціонування пристрою. Отриманої інформації з блоків 2 обчислення моментів рядків та 3 обчислення моментів колонок достатньо для обчислення в мікропроцесорі 4 площі об'єкта, визначення лівої-правої та верхньої-нижньої меж об'єкта, його місцеположення, габаритних розмірів, зміщення об'єкта та швидкості його переміщення між кадрами. Обчисленні нульовий, два перші та три другі моменти по координатах X та Y дозволяють визначити параметри зсуву, повороту та масштабу для нормалізації зображення об'єкта, що зазнало афінних перетворень, до еталона. Нормалізація зображення дозволить спростити порівняння об'єкта з еталоном та його розпізнавання, значно зменшить об'єм обчислень та підвищить швидкодію пристрою. Операція обчислення суми відстаней (або їх квадратів) у колонках без додаткових апаратних витрат може бути суміщена у часі з операцією зчитування в мікропроцесор 4 кодів з суматорів-накопичувачів 12 блока 2 обчислення моментів рядків. Суміщаються також операції обчислення суми відстаней у рядках та зчитування кодів з суматорів-накопичувачів 12 блока 3 обчислення моментів колонок. Таким чином всі паралельні операції в пристрої (сприйняття світла, бінаризація та підсумовування відстаней активних елементів в рядках та колонках) виконуються паралельно, а операція підсумовування накопичених відстаней та квадратів відстаней в рядках та колонках виконується послідовно на мікропроцесорі 4, оскільки паралельна її реалізація вимагає значних апаратних витрат, в малому ступені прискорюючи обчислення. Додаткові операції нормалізації зображення виконуються на мікропроцесорі 4, в незначному ступені впливаючи на загальний час обчислень, що й забезпечує пристрою високу продуктивність і ефективність використання апаратури. Час обчислення нульового, двох перших і трьох других моментів рядків та колонок з суміщенням підсумовування накопичених моментів рядків і колонок у мікропроцесорі 4 складе величину 7N тактів (для варіанта M=N). Для розміру матриці (256×256=65536 елементів) час обчислення шести моментів складе лише 7×256=1992 такти. Традиційне обчислення моментів на комп'ютері потребує виконання: 65536 операцій для обчислення нульового моменту, 2×65536 операцій для обчислення першого моменту по координаті X, 2×65536 операцій для обчислення першого моменту по координаті Y та 9×65536 для обчислення трьох других моментів, тобто 917504 операцій. Це порівняння вказує на надзвичайно високу продуктивність обробки інформації в сенсорній матриці. Сенсорна матриця може бути реалізована на базі КМОН-технології (комплементарний метал-оксид напівпровідник), яка дозволяє на одній технологічній основі реалізувати як фоточутливий елемент (фотосенсор), так і всі логічні елементи. Причому додаткові блоки 2 обчислення моментів в рядках і 3 обчислення моментів в колонках та блоки 6 формування відстаней по рядках та 7 формування відстаней по колонках можуть бути розміщені в 5 UA 82936 U 5 неактивному полі сенсорної матриці, не зменшуючи її фактор заповнення. Ці блоки будуються з стандартних елементів обчислювальної техніки: суматори-накопичувачі, групи елементів І, лічильники. Мікропроцесорні функції можуть бути реалізовані на будь-якому мікроконтролері, який має для цього всі необхідні входи і виходи та можливості виконання простих обчислень, наприклад фірми "Atmel" - AT91SAM9XE 256, фірми "Analog Devices" -ADuC702x та ін. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 20 25 30 35 40 45 50 55 60 1. Сенсорний пристрій для визначення місцеположення та моментів інерції об'єкта, який складається з сенсорної матриці, блоків обчислення моментів рядків і обчислення моментів колонок, мікропроцесора, перший вихід якого через цифро-аналоговий перетворювач підключений до третього входу "Поріг" сенсорної матриці, а другий вихід мікропроцесора підключений до другого входу "Скид" сенсорної матриці, третій вихід мікропроцесора підключений до першого входу "Зсув вліво" сенсорної матриці, четвертий вихід мікропроцесора підключений до четвертого входу "Зсув вниз" сенсорної матриці, а п'ятий вихід мікропроцесора підключений до п'ятого входу "Бінаризація" сенсорної матриці, шостий вхід сенсорної матриці є входом світлового потоку, виходи рядків сенсорної матриці підключені на перші входи блока обчислення моментів рядків, а виходи колонок сенсорної матриці підключені до перших входів блока обчислення моментів колонок, виходи блоків обчислення моментів рядків і обчислення моментів колонок підключені до першого і другого входів мікропроцесора відповідно, керуючі входи блоків обчислення моментів рядків та обчислення моментів колонок підключені відповідно до шостого і сьомого виходів мікропроцесора відповідно, десятий вихід мікропроцесора є виходом пристрою, який відрізняється тим, що пристрій додатково містить блоки формування відстаней по рядках і формування відстаней по колонках, другі входи блоків обчислення моментів рядків та обчислення моментів колонок підключені до виходів блоків формування відстаней по рядках та формування відстаней по колонках відповідно, вхід блока формування відстаней по рядках підключений до третього виходу мікропроцесора та першого входу "Зсув вліво" сенсорної матриці, а вхід блока формування відстаней по колонках підключений до четвертого виходу мікропроцесора та четвертого входу "Зсув вниз" сенсорної матриці, восьмий та дев'ятий виходи мікропроцесора з'єднані з керуючими входами блоків формування відстаней по рядках та формування відстаней по колонках відповідно. 2. Пристрій за п. 1, який відрізняється тим, що сенсорна матриця складається з МхN елементів, причому виходи правих елементів матриці зв'язані з інформаційними входами сусідніх лівих елементів у рядках, а виходи крайніх лівих елементів у рядках зв'язані з інформаційними входами крайніх правих елементів відповідно, а також з виходами рядків сенсорної матриці, виходи верхніх елементів у колонках зв'язані з інформаційними входами нижніх елементів колонок, а виходи самих нижніх елементів у колонках зв'язані відповідно з інформаційними входами самих верхніх у колонках елементів, а також зв'язані з виходами колонок сенсорної матриці, перші, другі, треті, четверті та п'яті керуючі входи елементів відповідно об'єднані та підключені до першого входу "Зсув вліво", другого входу "Скид", третього входу "Поріг", четвертого входу "Зсув вниз", п'ятого входу "Бінаризація" сенсорної матриці відповідно. 3. Пристрій за п. 2, який відрізняється тим, що кожний елемент сенсорної матриці має фотосенсор, управляючий вхід якого підключений до другого входу "Скид" сенсорної матриці, а вихід підключений до першого входу порогового елемента, другий вхід якого з'єднаний з третім входом сенсорної матриці "Поріг", вихід порогового елемента та виходи сусідніх елементів зліва і зверху сенсорної матриці підключені відповідно до першого, другого та третього інформаційних входів логічного елемента І-АБО, керуючі входи яких з'єднані з п'ятим входом "Бінаризація", четвертим входом "Зсув вниз" та першим входом "Зсув вліво" сенсорної матриці відповідно, вихід логічного елемента І-АБО підключений до одиничного входу тригера, вихід якого підключений до входів сусідніх лівого та нижнього елементів сенсорної матриці. 4. Пристрій за п. 1, який відрізняється тим, що блок обчислення моментів рядків складається з N суматорів-накопичувачів, входи яких через перші групи елементів І зв'язані через загальну шину з першим входом блока обчислення моментів рядків, а виходи суматорів-накопичувачів через другі групи елементів І зв'язані через загальну шину з виходом блока обчислення моментів рядків, керуючі входи першої групи елементів І зв'язані відповідно з виходами рядків, а також регістра зсуву, входи якого підключені до керуючого входу блока обчислення моментів рядків, а виходи підключені до керуючих входів других груп елементів І відповідно. 5. Пристрій за п. 1, який відрізняється тим, що блок формування відстаней по рядках складається з лічильника, виходи якого з'єднані із входом суматора-накопичувача із зсувом на 6 UA 82936 U 5 один розряд в сторону старших розрядів та першим входом комутатора, вихід суматоранакопичувача з'єднаний з другим входом комутатора, вихід якого є виходом блока, керуючий вхід комутатора підключений до керуючого входу блока формування відстаней по рядках, вхід тактових імпульсів блока формування відстаней по рядках підключений до вільного молодшого розряду суматора-накопичувача та його керуючого входу, а також через елемент затримки до входу лічильника. 7 UA 82936 U 8 UA 82936 U 9 UA 82936 U 10 UA 82936 U Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 11
ДивитисяДодаткова інформація
Назва патенту англійськоюSensor device for the determination of object position and inertia moments
Автори англійськоюBoiun Vitalii Petrovych
Назва патенту російськоюСенсорное устройство для определения местоположения и моментов инерции объекта
Автори російськоюБоюн Виталий Петрович
МПК / Мітки
МПК: G06T 7/00
Мітки: пристрій, об'єкта, сенсорний, моментів, місцеположення, визначення, інерції
Код посилання
<a href="https://ua.patents.su/13-82936-sensornijj-pristrijj-dlya-viznachennya-miscepolozhennya-ta-momentiv-inerci-obehkta.html" target="_blank" rel="follow" title="База патентів України">Сенсорний пристрій для визначення місцеположення та моментів інерції об’єкта</a>
Сенсорний пристрій для визначення місцеположення та центра ваги об’єкта
Номер патенту: 81142
Опубліковано: 25.06.2013
Автор: Боюн Віталій Петрович
МПК: G06T 7/00
Мітки: центра, сенсорний, місцеположення, пристрій, визначення, ваги, об'єкта
Формула / Реферат:
1. Сенсорний пристрій для визначення центра ваги об'єкта, який складається з сенсорної матриці, мікропроцесора, перший вихід якого через цифро-аналоговий перетворювач підключений до третього входу "Поріг" сенсорної матриці, а другий вихід мікропроцесора підключений до другого входу "Скид" сенсорної матриці, третій вихід мікропроцесора підключений до першого входу "Зсув вліво" сенсорної матриці, четвертий вихід...
Пристрій для визначення місцеположення та параметрів об’єкта в зображенні
Номер патенту: 76597
Опубліковано: 10.01.2013
Автор: Боюн Віталій Петрович
МПК: G06T 7/00
Мітки: зображенні, пристрій, об'єкта, місцеположення, визначення, параметрів
Формула / Реферат:
1. Пристрій для визначення місцеположення та параметрів об'єкта в зображенні, який складається з сенсорної матриці, мікропроцесора, перший вихід якого через цифро-аналоговий перетворювач підключений до входу "Поріг" сенсорної матриці, а другий вихід мікропроцесора підключений до входу сенсорної матриці "Скид", який відрізняється тим, що виходи рядків сенсорної матриці підключені на входи блока лічильників рядків...
Пристрій для визначення місцеположення рейкового рухомого об’єкта
Номер патенту: 74914
Опубліковано: 12.11.2012
Автор: Смірний Михайло Федорович
МПК: G06K 7/08
Мітки: рейкового, визначення, місцеположення, рухомого, об'єкта, пристрій
Формула / Реферат:
Пристрій для визначення місцеположення рейкового рухомого об'єкта, що містить першу потокочутливу магнітну головку, підключену до першого входу першого фазового детектора, другий вхід якого з'єднаний з другою потокочутливою магнітною головкою, та сполучену через другий фазовий детектор та перший пороговий елемент з входом першого елемента НІ, третю потокочутливу магнітну головку, розташовану проти рейки між робочими зазорами першої та другої...
Пристрій для визначення місцеположення рейкового транспорту
Номер патенту: 64154
Опубліковано: 25.10.2011
Автор: Смірний Михайло Федорович
МПК: G06K 7/08
Мітки: визначення, місцеположення, пристрій, транспорту, рейкового
Формула / Реферат:
Пристрій для визначення місцеположення рейкового транспорту, що містить перший, другий та третій фазові детектори, входи яких з'єднані з виводами відповідно першої, другої та третьої потокочутливих магнітних головок, розташованих вздовж рейки, причому відстань між крайніми головками дорівнює ширині робочого зазору головки запису, а перша головка розміщена в центрі цього зазору, перший та другий порогові елементи, які підключені до виходів...
Пристрій для визначення місцеположення рейкового рухомого об’єкта
Номер патенту: 77031
Опубліковано: 25.01.2013
Автор: Смірний Михайло Федорович
МПК: G06K 7/08
Мітки: об'єкта, визначення, рухомого, місцеположення, рейкового, пристрій
Формула / Реферат:
Пристрій для визначення місцеположення рейкового рухомого об'єкта, що містить першу потокочутливу магнітну головку, підключену до першого входу першого фазового детектора, другий вхід якого з'єднаний з другою потокочутливою магнітною головкою, та сполучену через другий фазовий детектор та перший пороговий елемент з входом першого елемента НІ, третю потокочутливу магнітну головку, розташовану проти рейки між робочими зазорами першої та...
Попередній патент: Нарізний комбайн
Наступний патент: Фільтрувальний елемент до фільтра немцова
Випадковий патент: Похідне 10,11,12,13-тетрагідродесмікозину, проміжні сполуки та спосіб одержання похідного 10,11,12,13-тетрагідродесмікозину