Спосіб та система для моделювання дій людини у визначеному середовищі
Формула / Реферат
1. Багатофакторний спосіб моделювання дій людини у визначеному середовищі шляхом переміщення віртуального манекена (10), що представляє дії людини у віртуальному середовищі, яке відповідає визначеному середовищу, причому манекен (10) визначається загальним положенням і декількома ступенями свободи зчленувань (12), а спосіб включає:
- операцію переміщення манекена (10) до цілі (13) за допомогою агента (32) притягання, записаного на машинозчитуваному носії із записаним на ньому програмним продуктом для зчитування цього носія за допомогою комп'ютера, що впливає на ступені свободи зчленувань (12) манекена (10), та
- операцію запобігання зіткненням манекена (10) з елементами середовища, що його оточує, за допомогою агента (21) зміщення, записаного на машинозчитуваному носії із записаним на ньому програмним продуктом для зчитування цього носія за допомогою комп'ютера, що впливає на загальне положення манекена (10) залежно від параметрів, які визначають дане середовище,
який відрізняється тим, що включає додатково операцію автоматичного коригування положення манекена (10) у ході його переміщення до цілі (13) за допомогою ергономічного агента (34), записаного на машинозчитуваному носії із записаним на ньому програмним продуктом для зчитування цього носія за допомогою комп'ютера, що впливає на ступені свободи зчленувань (12) манекена (10), і що передбачає такі етапи:
- визначення вектора рейтингів положень у відповідності зі ступенями свободи зчленувань (12) манекена (10);
- нормування зазначеного вектора рейтингів положень для формування нормованого вектора рейтингів положень;
- зважування зазначеного нормованого вектора рейтингів положень для формування вектора зважених рейтингів положень та
- обернення знака зазначеного вектора зважених рейтингів положень для визначення внеску ергономічного агента (34).
2. Спосіб за п. 1, який відрізняється тим, що включає додатково операцію загального переміщення до цілі (13) при дії агента (22) притягання, що впливає на загальне положення (G) манекена (10).
3. Спосіб за п. 1 або 2, який відрізняється тим, що кожному ступеню свободи зчленування (12) манекена (10) приписується нульовий рейтинг у відкритому інтервалі, визначеному навколо положення зміни знака алгебраїчного рейтингу, причому величина зазначеного інтервалу дорівнює величині кроку зміщення зчленування, заздалегідь визначеного для даного ступеня свободи.
4. Спосіб за будь-яким з пп. 1-3, який відрізняється тим, що етап нормування здійснюється шляхом поділу всіх складових вектора рейтингів положень на найбільше абсолютне значення цих складових.
5. Спосіб за будь-яким з пп. 1-4, який відрізняється тим, що етап зважування здійснюється шляхом помноження кожної складової нормованого вектора рейтингів положень на величину кроку зміщення зчленування, заздалегідь визначеного відповідно до типу зчленування (12).
6. Спосіб за п. 5, який відрізняється тим, що величина кроку зміщення зчленування постійна для всіх зчленувань (12).
7. Спосіб за п. 5 або 6, який відрізняється тим, що крок зміщення зчленування є кутом, величина якого складає від 0,001 рад до 0,1 рад.
8. Спосіб за будь-яким з пп. 1-7, який відрізняється тим, що етап визначення вектора рейтингів положень здійснюють шляхом перетворення критерію положень типу RULA на алгебраїчний критерій, відповідно до якого кожний рейтинг положення має позитивне або негативне значення з урахуванням напрямку повороту у зчленуванні (12).
9. Спосіб за будь-яким з пп. 1-8, який відрізняється тим, що включає додаткову операцію запобігання зіткненням манекена (10) з елементами середовища, що його оточує, за допомогою агента (31) зміщення, що впливає на ступені свободи зчленування (12) манекена (10) залежно від параметрів, що визначають дане середовище.
10. Спосіб за будь-яким з пп. 1-9, який відрізняється тим, що додатково включає операцію переміщення манекена (10) оператором у режимі реального часу за допомогою керуючого агента (23, 33), що впливає на загальне положення і/або на ступені свободи зчленування (12) манекена (10).
11. Спосіб за будь-яким з пп. 1-10, який відрізняється тим, що агент (22, 32) притягання, агент (21, 31) зміщення, ергономічний агент (34) і керуючий агент (23, 33) взаємодіють ієрархічним чином через загальні цифрові дані (15), що визначають манекен (10) і середовище, що його оточує.
12. Спосіб за п. 11, який відрізняється тим, що агент (22, 32) притягання, агент (21, 31) зміщення, ергономічний агент (34) і керуючий агент (23, 33) розташовують в ієрархічному порядку шляхом приписування кожному з них рівня активності, що залишається постійним під час усього переміщення манекена (10).
13. Спосіб за п. 12, який відрізняється тим, що агент (21, 31) зміщення має найнижчий рівень активності, а ергономічний агент (34) має найвищий рівень активності.
14. Спосіб за п. 12 або 13, який відрізняється тим, що рівень активності агента (21,31) зміщення дорівнює цілому числу в межах від 1 до 2, рівень активності агента (22, 32) притягання дорівнює цілому числу в межах від 2 до 4, рівень активності ергономічного агента (34) дорівнює цілому числу в межах від 5 до 15, а рівень активності керуючого агента (23, 33) дорівнює цілому числу в межах від 2 до 4.
15. Багатофакторна система моделювання дій людини у визначеному середовищі, яка включає машинозчитуваний носій із записаним на ньому програмним продуктом для зчитування його за допомогою комп'ютера, для моделювання дій людини у визначеному середовищі шляхом переміщення віртуального манекена (10), що представляє дії людини у віртуальному середовищі, що відповідає визначеному середовищу, причому манекен (10) визначається загальним положенням і декількома ступенями свободи зчленувань (12), а система містить:
- агент (32) притягання для впливу на ступені свободи зчленувань (12) манекена (10) для його переміщення до цілі (13), та
- агент (21) зміщення для впливу на загальне положення манекена (10) залежно від параметрів, які визначають середовище, що його оточує, для запобігання зіткненням манекена (10) з елементами даного середовища,
яка відрізняється тим, що додатково містить ергономічний агент (34) для впливу на ступені свободи зчленувань (12) манекена (10) для автоматичного коригування положення манекена (10) у ході його переміщення до цілі (13), причому ергономічний агент (34) містить вектор, складові якого є величинами, оберненими зваженим рейтингам положень зчленувань (12).
16. Система за п. 15, яка відрізняється тим, що зважені рейтинги положень засновані на алгебраїчному критерії системи положень типу RULA.
17. Система за п. 15 або 16, яка відрізняється тим, що кожний ступінь свободи з декількох ступенів свободи зчленувань визначений кроком кутового зміщення в межах від 0,001 рад до 0,1 рад.
18. Система за будь-яким з пп. 15-17, яка відрізняється тим, що додатково містить агент (22) притягання для впливу на загальне положення манекена (10) для його переміщення до цілі (13).
19. Система за будь-яким з пп. 15-18, яка відрізняється тим, що додатково містить агент (31) зміщення для впливу на ступені свободи зчленувань (12) манекена (10) залежно від параметрів, які визначають середовище, що його оточує, для запобігання зіткненням манекена (10) з елементами даного середовища.
20. Система за будь-яким з пп. 15-19, яка відрізняється тим, що додатково містить принаймні один керуючий агент (23, 33) для впливу на загальне положення і/або на ступені свободи зчленувань (12) манекена (10) для забезпечення для оператора можливості впливу на переміщення манекена (10) у режимі реального часу.
21. Система за будь-яким з пп. 15-20, яка відрізняється тим, що агент (22, 32) притягання, агент (21, 31) зміщення, ергономічний агент (34) і керуючий агент (23, 33) призначені для ієрархічної взаємодії через загальні чисельні дані (15), що визначають манекен (10) і середовище, що його оточує.
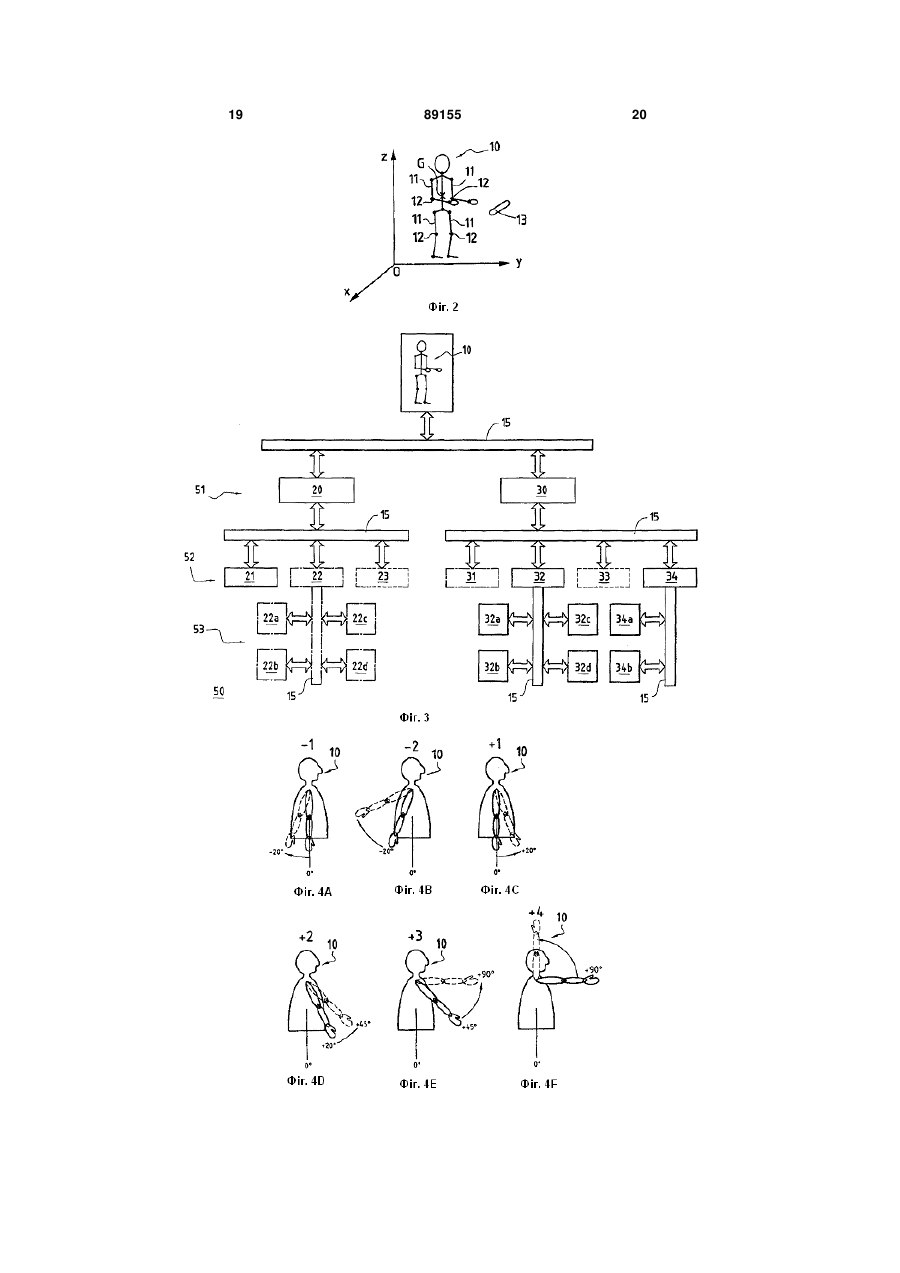
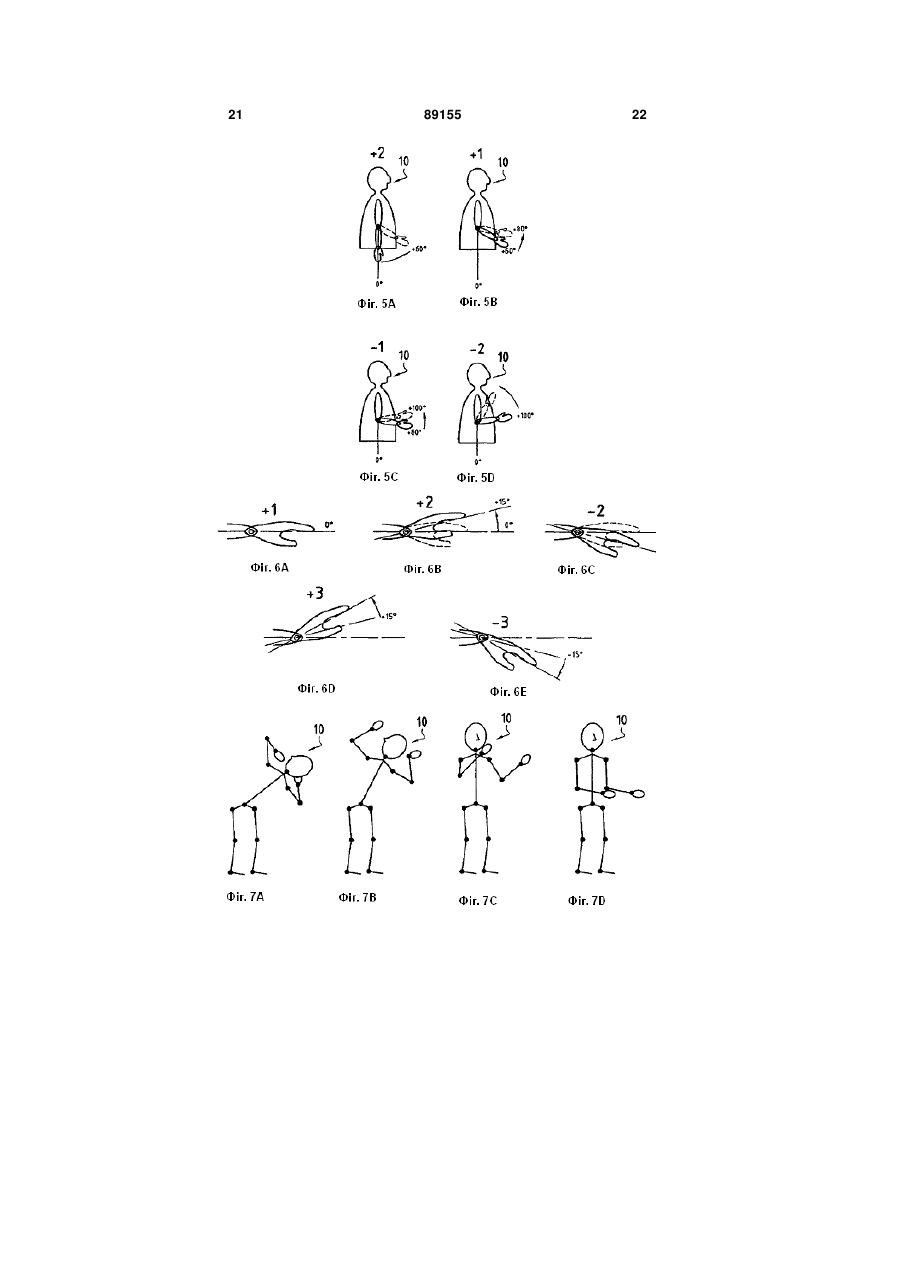
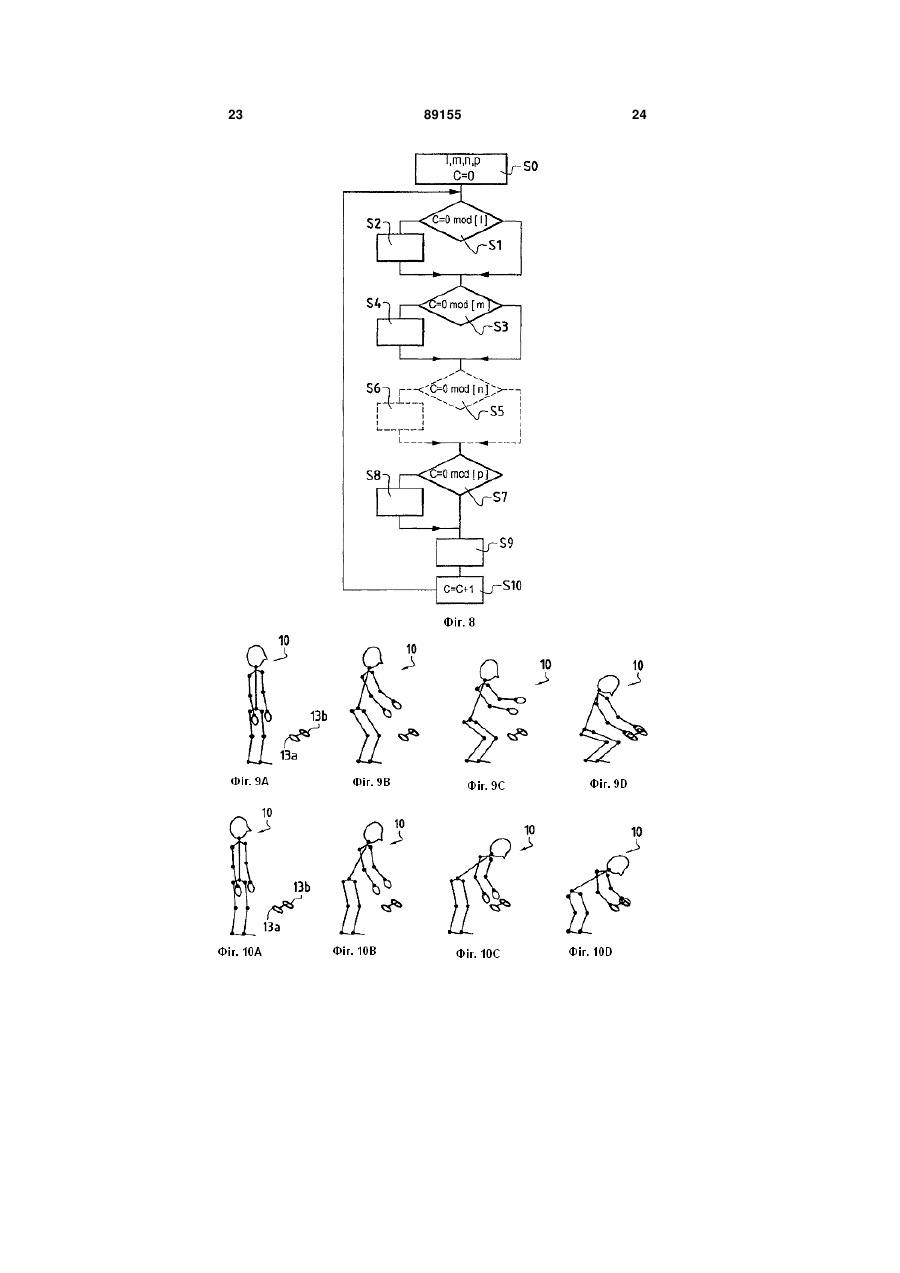
Текст
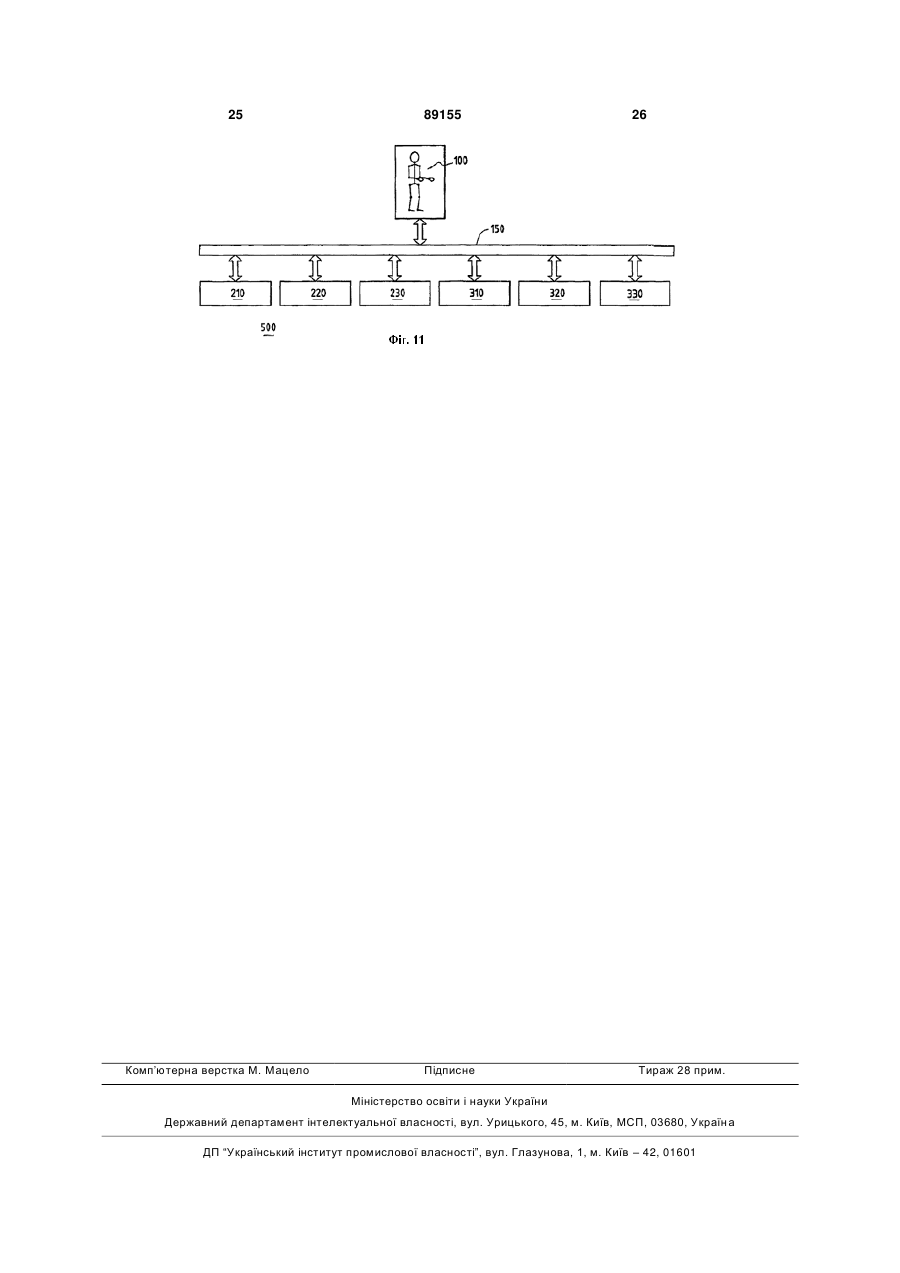
1. Багатофакторний спосіб моделювання дій людини у визначеному середовищі шляхом переміщення віртуального манекена (10), що представляє дії людини у віртуальному середовищі, яке відповідає визначеному середовищу, причому манекен (10) визначається загальним положенням і декількома ступенями свободи зчленувань (12), а спосіб включає: - операцію переміщення манекена (10) до цілі (13) за допомогою агента (32) притягання, записаного на машинозчитуваному носії із записаним на ньому програмним продуктом для зчитування цього носія за допомогою комп'ютера, що впливає на ступені свободи зчленувань (12) манекена (10), та - операцію запобігання зіткненням манекена (10) з елементами середовища, що його оточує, за допомогою агента (21) зміщення, записаного на машинозчитуваному носії із записаним на ньому програмним продуктом для зчитування цього носія за допомогою комп'ютера, що впливає на загальне положення манекена (10) залежно від параметрів, які визначають дане середовище, який відрізняється тим, що включає додатково операцію автоматичного коригування положення манекена (10) у ході його переміщення до цілі (13) за допомогою ергономічного агента (34), записаного на машинозчитуваному носії із записаним на ньому програмним продуктом для зчитування цьо 2 (19) 1 3 89155 4 положень здійснюють шляхом перетворення критерію положень типу RULA на алгебраїчний критерій, відповідно до якого кожний рейтинг положення має позитивне або негативне значення з урахуванням напрямку повороту у зчленуванні (12). 9. Спосіб за будь-яким з пп. 1-8, який відрізняється тим, що включає додаткову операцію запобігання зіткненням манекена (10) з елементами середовища, що його оточує, за допомогою агента (31) зміщення, що впливає на ступені свободи зчленування (12) манекена (10) залежно від параметрів, що визначають дане середовище. 10. Спосіб за будь-яким з пп. 1-9, який відрізняється тим, що додатково включає операцію переміщення манекена (10) оператором у режимі реального часу за допомогою керуючого агента (23, 33), що впливає на загальне положення і/або на ступені свободи зчленування (12) манекена (10). 11. Спосіб за будь-яким з пп. 1-10, який відрізняється тим, що агент (22, 32) притягання, агент (21, 31) зміщення, ергономічний агент (34) і керуючий агент (23, 33) взаємодіють ієрархічним чином через загальні цифрові дані (15), що визначають манекен (10) і середовище, що його оточує. 12. Спосіб за п. 11, який відрізняється тим, що агент (22, 32) притягання, агент (21, 31) зміщення, ергономічний агент (34) і керуючий агент (23, 33) розташовують в ієрархічному порядку шляхом приписування кожному з них рівня активності, що залишається постійним під час усього переміщення манекена (10). 13. Спосіб за п. 12, який відрізняється тим, що агент (21, 31) зміщення має найнижчий рівень активності, а ергономічний агент (34) має найвищий рівень активності. 14. Спосіб за п. 12 або 13, який відрізняється тим, що рівень активності агента (21,31) зміщення дорівнює цілому числу в межах від 1 до 2, рівень активності агента (22, 32) притягання дорівнює цілому числу в межах від 2 до 4, рівень активності ергономічного агента (34) дорівнює цілому числу в межах від 5 до 15, а рівень активності керуючого агента (23, 33) дорівнює цілому числу в межах від 2 до 4. 15. Багатофакторна система моделювання дій людини у визначеному середовищі, яка включає машинозчитуваний носій із записаним на ньому програмним продуктом для зчитування його за допомогою комп'ютера, для моделювання дій людини у визначеному середовищі шляхом переміщення віртуального манекена (10), що представляє дії людини у віртуальному середовищі, що відповідає визначеному середовищу, причому манекен (10) визначається загальним положенням і декількома ступенями свободи зчленувань (12), а система містить: - агент (32) притягання для впливу на ступені свободи зчленувань (12) манекена (10) для його переміщення до цілі (13), та - агент (21) зміщення для впливу на загальне положення манекена (10) залежно від параметрів, які визначають середовище, що його оточує, для запобігання зіткненням манекена (10) з елементами даного середовища, яка відрізняється тим, що додатково містить ергономічний агент (34) для впливу на ступені свободи зчленувань (12) манекена (10) для автоматичного коригування положення манекена (10) у ході його переміщення до цілі (13), причому ергономічний агент (34) містить вектор, складові якого є величинами, оберненими зваженим рейтингам положень зчленувань (12). 16. Система за п. 15, яка відрізняється тим, що зважені рейтинги положень засновані на алгебраїчному критерії системи положень типу RULA. 17. Система за п. 15 або 16, яка відрізняється тим, що кожний ступінь свободи з декількох ступенів свободи зчленувань визначений кроком кутового зміщення в межах від 0,001 рад до 0,1 рад. 18. Система за будь-яким з пп. 15-17, яка відрізняється тим, що додатково містить агент (22) притягання для впливу на загальне положення манекена (10) для його переміщення до цілі (13). 19. Система за будь-яким з пп. 15-18, яка відрізняється тим, що додатково містить агент (31) зміщення для впливу на ступені свободи зчленувань (12) манекена (10) залежно від параметрів, які визначають середовище, що його оточує, для запобігання зіткненням манекена (10) з елементами даного середовища. 20. Система за будь-яким з пп. 15-19, яка відрізняється тим, що додатково містить принаймні один керуючий агент (23, 33) для впливу на загальне положення і/або на ступені свободи зчленувань (12) манекена (10) для забезпечення для оператора можливості впливу на переміщення манекена (10) у режимі реального часу. 21. Система за будь-яким з пп. 15-20, яка відрізняється тим, що агент (22, 32) притягання, агент (21, 31) зміщення, ергономічний агент (34) і керуючий агент (23, 33) призначені для ієрархічної взаємодії через загальні чисельні дані (15), що визначають манекен (10) і середовище, що його оточує. Даний винахід належить до галузі імітації переміщень віртуального манекена (моделі людини) у віртуальному середовищі. Більш конкретно, винахід стосується переміщень віртуальної моделі людини за допомогою багатофакторної моделі. Моделювання у віртуальному середовищі використовується в даний час у багатьох галузях, зокрема, в авіаційній і аерокосмічній промисловості. Наприклад, цифрові моделі часто використову ють для оцінки взаємного впливу різноманітних елементів систем. Крім того, моделювання може використовуватися для імітації дій людини в певних умовах з метою наочного представлення, наприклад, переміщень, що їх має здійснити технік для виконання таких дій. Ця методика корисна для оцінки й оптимізації доступності певних елементів устаткування, наприклад двигуна літака, що потребують регулярного огляду й обслуговування. Крім того, моде 5 лювання з використанням віртуальної моделі людини дозволяє контролювати ступінь досяжності різноманітних елементів конструкції вже на стадії їхнього моделювання. Використання віртуального манекена в таких застосуваннях уже відоме. Приклад такого використання наводиться в роботі Chedmail, Damay et Le Roy, "Realite virtuelle, maquette numerique du produit, outils de distribution et partage de la conception", Joumees Primeca, La Plagne, 7-9 avril 1999. У цій роботі пропонується спосіб оцінки легкості монтажу й демонтажу об'єктів у захаращеному середовищі за допомогою імітації переміщень віртуального манекена у віртуальному середовищі. Віртуальний манекен являє собою сукупність цифрових даних, яка визначає кінематичну систему, що характеризується декількома зчленованими частинами тіла, яким відповідає певна кіль кість ступенів свободи. Таким чином, у кожний момент манекен може бути визначений своїм загальним положенням у метричному просторі й значеннями ступенів свободи своїх зчленувань (суглобів). Ці дані, а також параметри, що визначають середовище, в якому знаходиться манекен, можуть бути збережені на носії цифрових даних. Принцип способу, запропонованого у вищезгаданій статті, заснований на використанні так званої "багатофакторної" системи, зображеної на Фіг.11. Багатофакторна система 500 містить сукупність активних елементів, названих "агентами" 210, 220, 230, 310, 320 і 330, що діють на пасивні об'єкти, наприклад частини тіла і зчленування віртуального манекена 100, і які враховують стан середовища, що його оточує. У цій багатофакторній системі 500 цифрові дані, що визначають манекен 100, який знаходиться в оточенні середовища, утворюють "загальні дані" 150, через які здійснюється взаємодія різноманітних агентів 210, 220, 230, 310, 320 і 330. Поведінка цих агентів управляється простими правилами; проте взаємодія між ними дозволяє одержати складну колективну поведінку, наприклад переміщення манекена. Таким чином, процес визначення траєкторії руху віртуального манекена 100 розподілений по різноманітних агентах 210, 220, 230, 310, 320 і 330, що можуть впливати на манекен 100 з урахуванням параметрів навколишнього середовища. Кожний агент визначає вплив на загальне положення манекена 100 або на ступені свободи його зчленувань. На Фіг.11 зображений перший агент 220 притягання (привернення, тяжіння), що впливає на загальне положення манекена 100, і другий агент 320 притягання, що впливає на ступені свободи зчленувань манекена 100. Агенти 220 і 320 притягання призначені для переміщення манекена 100 до визначеної цілі. Додатково на загальне положення манекена 100 впливає перший агент 210 зміщення, а на ступені свободи зчленувань манекена 100 впливає другий агент 310 зміщення. Агенти 210 і 310 змі 89155 6 щення діють з урахуванням параметрів навколишнього середовища з тим, щоб запобігти зіткненню манекена 100 з елементами цього середовища. Крім того, на загальне положення манекена 100 впливає перший керуючий агент 230, а на ступені свободи зчленувань манекена 100 впливає другий керуючий агент 330. Керуючі агенти 230 і 330 дозволяють оператору впливати на траєкторію руху манекена 100 в процесі її генерації в режимі реального часу. При переміщенні й рухах манекена, як правило, враховуються межі рухів його зчленувань. Втім, може бути реалізоване будь-яке положення манекена, що не виходить за межі руху його зчленувань. Таким чином, можуть бути отримані положення, незручні або навіть небезпечні при реальній роботі людини (див. Фіг.10A-10D). Хоча невдалі положення завжди можуть бути скориговані пізніше, для цього необхідне здійснення пробних іспитів з оцінкою кожного отриманого положення з метою одержання зручних положень. Задача, на вирішення якої спрямований даний винахід, полягає в усуненні вищеописаних хиб і в розробці способу й системи, що дозволяють моделювати переміщення й рухи манекена, забезпечуючи при цьому оптимальний рівень зручності прийнятих ним положень. Для вирішення поставленої задачі пропонується багатофакторний спосіб переміщення віртуального манекена у віртуальному середовищі, який визначається загальним положенням і декількома ступенями свободи зчленувань. Спосіб за винаходом передбачає: - внесок агента притягання, що впливає на ступені свободи зчленувань манекена для його переміщення до цілі; - внесок агента зміщення, що впливає на загальне положення манекена залежно від параметрів, що визначають середовище, яке його оточує, для запобігання зіткненням манекена з елементами цього середовища. При цьому спосіб за винаходом характеризується тим, що додатково передбачає внесок ергономічного агента, що впливає на ступені свободи зчленувань манекена для автоматичного коригування положення манекена в ході його переміщення до цілі. Таким чином, спосіб за винаходом дозволяє автоматично оптимізувати положення манекена, тобто згенероване положення є зручним починаючи від моменту його виникнення. Це звільняє від необхідності здійснення подальших іспитів, спрощує роботу і приводить до значної економії часу. В оптимальному варіанті спосіб може містити внесок агента притягання, що впливає на загальне положення манекена для його переміщення до цілі. Спосіб також може містити внесок агента зміщення, що впливає на ступені свободи зчленувань манекена залежно від параметрів, що визначають середовище, що його оточує, для полегшення пошуку рішень запобігання зіткненням манекена з елементами середовища, що його оточує. 7 Спосіб може додатково містити внесок, щонайменше, одного керуючого агента, що впливає на загальне положення і/або на ступені свободи зчленувань манекена і який дозволяє оператору впливати на переміщення манекена в режимі реального часу. Відповідно до однієї з відмінностей винаходу внесок ергономічного агента включає такі етапи: - визначення вектора рейтингів положень у відповідності до ступенів свободи зчленувань манекена, - нормування зазначеного вектора рейтингів положень для формування нормованого вектора рейтингів положень, - зважування зазначеного нормованого вектора рейтингів положень для формування вектора зважених рейтингів положень, - обернення знака зазначеного вектора зважених рейтингів положень для визначення внеску ергономічного агента. Етап визначення вектора рейтингів положень здійснюється шляхом перетворення критерію положень типу RULA на алгебраїчний критерій, згідно з яким кожний рейтинг положення має позитивну або негативну величину з урахуванням напрямку повороту у зчленуванні. В оптимальному варіанті кожному ступеню свободи зчленування манекена приписується нульовий рейтинг у відкритому інтервалі, визначеному навколо положення зміни знака алгебраїчного рейтингу. Величина зазначеного інтервалу дорівнює величині кроку зміщення зчленування, заздалегідь визначеного для даного ступеня свободи. Етап нормування може здійснюватися шляхом розподілу всіх складових вектора рейтингів положень на найбільше абсолютне значення цих складових. Етап зважування може здійснюватися шляхом помноження кожної складової нормованого вектора рейтингів положень на величину кроку зміщення зчленування, заздалегідь визначеного відповідно до типу зчленування. Згідно з одним з варіантів винаходу величина кроку зміщення зчленування постійна для всіх зчленувань. У оптимальному варіанті крок зміщення зчленування являє собою кут, величина якого складає від 0,001 рад до 0,1 рад. Відповідно до іншої відмінності винаходу агент притягання, агент зміщення, ергономічний агент і керуючий агент взаємодіють ієрархічним чином через загальні чисельні дані, що визначають манекен і середовище, що його оточує. Агент притягання, агент зміщення, ергономічний агент і керуючий агент можуть бути розташовані в ієрархічному порядку шляхом приписування кожному з них рівня активності, що залишається постійним під час усього переміщення манекена. Відповідно до конкретного варіанта винаходу агент зміщення має більш низький рівень активності, а ергономічний агент має найвищий рівень активності. В оптимальному варіанті рівень активності агента зміщення дорівнює цілому числу в межах 89155 8 від 1 до 2, рівень активності агента притягання дорівнює цілому числу в межах від 2 до 4, рівень активності ергономічного агента дорівнює цілому числу в межах від 5 до 15, а рівень активності керуючого агента дорівнює цілому числу в межах від 2 до 4. Винахід також охоплює комп'ютерну програму, розроблену для здійснення вищеописаного способу в ході її виконання комп'ютером. Винахід також охоплює багатофакторну систему для переміщення у віртуальному середовищі віртуального манекена, що визначається загальним положенням і декількома ступенями свободи зчленувань. Система за винаходом містить: - агент притягання, призначений для впливу на ступені свободи зчленувань манекена для його переміщення до цілі, і - агент зміщення, призначений для впливу на загальне положення манекена залежно від параметрів, які визначають середовище, що його оточує, для запобігання зіткненням манекена з елементами цього середовища. Система за винаходом характеризується тим, що додатково містить ергономічний агент, призначений для впливу на ступені свободи зчленувань манекена для автоматичного коригування положення манекена в ході його переміщення до цілі. Інші особливості й переваги способу й системи за винаходом стануть ясні з нижченаведеного докладного опису, що надається з посиланнями на додані креслення, на яких представлений один з можливих варіантів здійснення винаходу, що не накладає яких-небудь обмежень. На кресленнях: - Фіг.1 подає, в перспективному зображенні, апаратні засоби, використовувані для здійснення системи або способу за винаходом; - Фіг.2 украй схематично зображує манекен, визначений відповідно до винаходу в метричному просторі; - Фіг.3 вкрай схематично зображує архітектуру багатофакторної системи, використовуваної відповідно до винаходу для переміщення манекена; - Фіг.4A-4F являють собою схематичні діаграми, що ілюструють отримані відповідно до винаходу рейтинги типу RULA положень руки манекена; - Фіг.5A-5D зображують схематичні діаграми, що ілюструють отримані відповідно до винаходу рейтинги типу RULA положень передпліччя манекена; - Фіг.6А-6Е зображують схематичні діаграми, що ілюструють отримані відповідно до винаходу рейтинги типу RULA положень зап'ястя; - Фіг.7A-7D украй схематично зображують послідовність коригування положення манекена під впливом одного ергономічного агента за винаходом; - Фіг.8 зображує блок-схему основних етапів багатофакторного способу за винаходом; - Фіг.9A-9D украй схематично зображують послідовність переміщень манекена під впливом багатофакторної системи з ергономічним агентом відповідно до винаходу; - Фіг.10A-10D украй схематично зображують послідовність переміщень манекена відповідно до 9 відомих рішень під впливом багатофакторної системи без ергономічного агента; - Фіг.11 украй схематично зображує архітектуру багатофакторної системи, використовуваної для моделювання переміщень манекена у відомих рішеннях. На Фіг.1 зображена система, яка може використовуватися для моделювання переміщень віртуального манекена. Ця система містить робочу станцію або комп'ютер 1, що має гарні графічні можливості і використовується для здійснення роботи програмного забезпечення, розробленого для реалізації способу за винаходом. Комп'ютер 1 має звичайні для пристроїв такого типу апаратні засоби. Більш конкретно, комп'ютер містить центральний блок 2, що виконує послідовності команд програмного забезпечення, яке відповідає способу за винаходом, центральний запам'ятовуючий пристрій 3, що зберігає дані виконуваних програм, носії цифрових даних (жорсткий диск, дисковід для компакт-дисків 4, дисковід для гнучких дисків тощо), що забезпечують тривале зберігання даних і програмного забезпечення, периферійні пристрої вводу (клавіатуру 5, мишу 6 типу "2D" або "3D", джойстик тощо), а також периферійні пристрої виводу (екран 7, стереоскопічні шоломи або окуляри тощо), що забезпечують відображення переміщень віртуального манекена. Зрозуміло, для збільшення обчислювальних потужностей моделювання за винаходом може здійснюватися на декількох робочих станціях, що працюють паралельно. На Фіг.2 украй схематично зображений віртуальний манекен 10, визначений сукупністю "пасивних об'єктів", тобто частин 11 тіла, з'єднаних між собою зчленуваннями 12. Манекен 10 рухається у віртуальному середовищі, визначеному декількома предметами, серед яких знаходиться ціль 13 руху манекена. Манекен 10 і середовище, що його оточує, визначені в метричному просторі (О; х, у, z). Цей метричний простір дозволяє просто описати положення й орієнтацію кожної частини 11 тіла манекена 10, а також цілі 13 його руху. Положення будь-якого об'єкта може бути описано сукупністю трьох декартових координат, відкладених по осях х, у, z, а орієнтація цього об'єкта може бути описана по відомій методиці трьома кутами, визначеними відносно тих самих трьох осей х, y,z. Манекен 10 може бути визначений у кожний момент часу значеннями внутрішніх ступенів свободи своїх зчленувань 12 і своїм загальним положенням. Загальне положення манекена визначається, наприклад, положенням його центру ваги G, а також орієнтацією манекена відносно до вертикальної осі, тобто осі z. Зрозуміло, при цьому також слід ураховувати параметри або обмеження, які накладаються межами руху зчленувань і фізичними зв'язками між різноманітними частинами 11 тіла цього манекена 10. Ці дані й перемінні, що визначають манекен 10, а також параметри, що визначають середовище, що його оточує, зберігаються на носії 3 цифрових даних обчислювальної системи 1. 89155 10 На Фіг.3 украй схематично зображена архітектура багатофакторної системи 50 за винаходом, використовуваної для моделювання переміщень віртуального манекена 10. Ця багатофакторна система 50 складається з сукупності активних елементів, або агентів 20, 21, 22, 23, 30, 31, 32, 33 і 34, що діють на пасивні елементи (частини 11 тіла й зчленування 12), що складають манекен 10, з урахуванням середовища, що його оточує. Дані або перемінні, які визначають манекен 10 і середовище, що його оточує, утворюють загальні (тобто спільно використовувані) дані 15, через які здійснюється взаємодія різноманітних агентів. Архітектура багатофакторної системи може бути складена з декількох ярусів, або рівнів, що утворюють пірамідальну структуру, так, щоб агенти нижчого рівня вносили свій внесок у дії агентів вищого рівня. У наведеному прикладі багатофакторна система 50 містить перший рівень 51, другий рівень 52 і третій рівень 53. Перший рівень 51 ілюструє вплив на манекен 10 або глобальний внесок у його рух і містить внесок першого глобального агента 20 і внесок другого глобального агента 30, що діють на манекен 10 за допомогою зміни загальних даних 15. Перший глобальний агент 20 впливає на загальне положення манекена 10, а другий глобальний агент 30 впливає на внутрішні ступені свободи зчленувань 12 манекена 10. Другий рівень 52 ілюструє різноманітні внески агентів різноманітних типів, які породжують внески першого й другого глобальних агентів 20 і 30, взаємодіючи через загальні дані 15. Для забезпечення переміщення манекена 10 у середовищі, що його оточує, без зіткнень з його елементами за умови зберігання для них зручних положень достатньо, щоб другий рівень 52 багатофакторної системи 50 містив принаймні один агент притягання, принаймні один агент зміщення й принаймні один ергономічний агент. Так, другий рівень 52 багатофакторної системи 50 може містити агент 21 зміщення (позначений безперервною лінією), що впливає на загальне положення манекена 10, агент 32 притягання (позначений безперервною лінією), що впливає на внутрішні ступені свободи зчленувань 12 манекена 10, і ергономічний агент 34 (позначений безперервною лінією), що також впливає на внутрішні ступені свободи зчленувань 12 манекена 10. У цьому випадку агент 21 зміщення, по суті, збігається з першим глобальним агентом 20, оскільки це єдиний агент, що впливає на загальне положення манекена 10. Агент 21 зміщення впливає на загальне положення манекена, викликаючи його зміщення і/або повороти в середовищі, що його оточує, для запобігання зіткненням з його елементами. З другого боку, агент 32 притягання впливає на зчленування манекена, наприклад, щоб дозволити його рукам досягти заданої цілі. Додатково, для загального наближення манекена 10 до цілі 13, наприклад, за допомогою переміщення ніг манекена 10 по нижній поверхні середовища, що його оточує, другий рівень 52 11 багатофакторної системи 50 може містити агент 22 притягання (позначений штрихпунктирною лінією), що впливає на загальне положення манекена 10. Крім того, для оптимізації або спрощення пошуків рішень, що запобігають зіткненню манекена 10 з елементами середовища, що його оточує, другий рівень 52 багатофакторної системи 50 може містити агент 31 зміщення (позначений штрихпунктирною лінією), що впливає на внутрішні ступені свободи зчленувань 12 манекена 10. За необхідністю другий рівень 52 багатофакторної системи 50 може містити, щонайменше, один керуючий агент 23, 33 (позначений пунктирною лінією), що впливає на загальне положення манекена 10 і/або на внутрішні ступені свободи його зчленувань 12. У третьому рівні 53 зображені для приклада декілька локальних агентів, що вносять елементарні внески в деякі з агентів другого рівня 52 також шляхом зміни загальних даних 15. Внесок агента 22 притягання, що впливає на загальне положення манекена 10, може, наприклад, містити внесок агента 22а притягання лівої руки, внесок агента 22Ь притягання правої руки, внесок агента 22с притягання для орієнтації, а також інші внески агентів притягання, позначені елементом 22d. Внесок агента 32 притягання, що впливає на внутрішні ступені свободи зчленувань 12 манекена 10, може, наприклад, містити внесок агента 32а притягання лівої кисті, внесок агента 32b притягання правої кисті, внесок агента 32с притягання корпуса тіла, а також інші внески агентів притягання, позначені елементом 32d. Внесок ергономічного агента 34 містить внесок агента 34а оптимізації положення і може також містити інші внески ергономічних агентів, позначені елементом 34b. Таким чином, хоча кожний елементарний агент має певну функцію й представляє лише частину манекена 10 і середовища, що його оточує, він може впливати на цей манекен 10, вносячи свій внесок у визначення загального положення манекена 10 і/або внутрішніх ступенів свободи його зчленувань 12 з урахуванням своїх можливостей і доступної йому інформації, а також поставленої перед ним задачі. Крім того, вплив або внесок кожного агента обмежується або нормується межами одного кроку лінійного або кутового зміщення манекена 10 або одного кроку кутового зміщення його зчленувань 12. Ці кроки заздалегідь визначені таким чином, щоб моделювати невеличкі елементарні зміщення. Наприклад, крок лінійного зміщення може мати величину від 1мм до 10см. На додаток до сказаного, різноманітні агенти взаємодіють ієрархічним чином за допомогою загальних цифрових даних 15. Відносний пріоритет кожного внеску визначається частотою вирахування внеску кожного агента і його інтеграції в глобальний внесок у переміщення манекена 10. Зазначена частота визначається відносно до тактової частоти імпульсів, що регулюють етапи обчислення різноманітних агентів. 89155 12 Іншими словами, вплив кожного агента обмежується заздалегідь визначеним рівнем активності, обернено пропорційним частоті дій цього агента. Наприклад, якщо при моделюванні доступу до певного об'єкта в захаращеному середовищі головною метою є запобігання зіткнень з елементами середовища, відповідні агенти мають найвищу частоту, тобто найнижчий рівень активності. Так, агент, що має найвищу частоту, тобто рівень активності, рівний 1, діє на кожному такті або на кожному етапі обчислень. Задачею агента 22, 32 притягання є досягнення манекеном 10 цілі 13 або інших цілей. Тому цей агент враховує тільки положення й орієнтацію цілі 13, а також частин 11 тіла або зчленувань 12 манекена 10, на які він впливає. Він не бере до уваги розміри об'єкта маніпуляцій або будь-яку іншу інформацію. Вплив агента 21, 31 зміщення змушує манекен 10 зміщуватися в середовищі, що його оточує, уникаючи зіткнень з його елементами. Відповідно до відомих рішень зіткнення може бути визначене шляхом відтворення між двома віртуальними об'єктами лінії зіткнення. В цьому випадку внесок агента 21, 31 зміщення визначається залежно від зміни довжини цієї лінії зіткнення. Таким чином, різноманітні внески агента 21, 31 зміщення і агента 22, 32 притягання, що діють на загальне положення або на ступені свободи зчленувань 12 манекена 10, можуть викликати переміщення манекена 10 до цілі 13, запобігаючи його зіткненню з елементами середовища, що його оточує. Багатофакторна система може додатково містити керуючий агент 23 і 33, що впливає на загальне положення і/або на ступені свободи зчленувань 12 манекена 10 і дозволяє оператору впливати на переміщення манекена 10 у режимі реального часу. Керуючому агенту також може бути приписаний певний рівень активності. Керуючий агент 23, 33 дозволяє оператору впливати на траєкторію руху манекена в процесі її створення з тим, щоб використовувати своє загальне бачення ситуації або свій досвід. Таким чином, оператор може вибрати кращий напрямок руху кисті руки манекена 10 або всього його тіла, або ж прямо управляти ступенями свободи зчленувань 12 манекена 10, задаючи їм певний напрямок. Втім, при переміщеннях манекена 10 він може приймати положення, небезпечні для реальної працюючої людини. Проте вплив ергономічного агента 34 забезпечує оптимізацію ергономіки манекена 10 при його прямуванні по розрахованій траєкторії. Внесок ергономічного агента 34 визначається вектором або матрицею рейтингів положень. Для оцінки цих рейтингів положень можуть використовуватися різноманітні методики. Наприклад, стаття McAttamey і співавторів, названа "RULA: A Survey Method for the Investigation of Work-related Upper Limb Disorders", Applied Ergonomics, vol. 24, No. 2, April 1993, pp.91-99, присвячена методу оцінки агентів професійного 13 ризику виникнення суглобово-мускульних розладів, дозволяє оцінити різноманітні положення шиї, торсу й верхніх кінцівок за певною системою оцінок. Ця система оцінок дозволяє скласти перелік дій зі зменшення ризику тілесних ушкоджень у результаті неправильного положення людини. На Фіг.4А-6Е наведені приклади рейтингів положень руки, передпліччя й зап'ястя, визначених на основі системи оцінок, складеної за запропонованою в названій статті методикою, або технології RULA. На цих кресленнях показані знаки, присвоєні кожному значенню рейтингу RULA, які спершу мають тільки позитивні знаки. В загальному випадку за методикою RULA цілому позитивному (тобто натуральному) числу ставиться у відповідність амплітуда рухів кожної частини тіла манекена таким чином, що більша кількість відповідає більш небезпечному положенню частини тіла. Так, рейтинг 1 відповідає амплітуді руху в межах зручного положення, а рейтинг 4 відповідає амплітуді руху, що відповідає небезпечному положенню. Задача ергономічного агента 34 полягає в мінімізації критерію ускладненості положення на всій траєкторії руху манекена 10. Таким чином, його функція зводиться до врахування обмежень щодо ускладненості положень у ході визначення траєкторії, а не в ході подальшого аналізу траєкторії, як це робиться звичайно. Для визначення ергономічного агента, що використовує оцінку положення типу RULA, цей критерій перетворюється на алгебраїчний критерій таким чином, що рейтинг кожного положення визначається в позитивному або негативному напрямку стосовно до даного зчленування. Позитивний напрямок може бути визначений довільно, проте припускається, що це визначення має зберігатися на всій траєкторії руху манекена 10. Цей позитивний напрямок має бути однаковим для всіх агентів, що діють на ступені свободи манекена. Наприклад, якщо рейтинг визначений для руху в позитивному для даного зчленування напрямку, йому присвоюється знак "+", а якщо рейтинг визначений для руху в негативному для даного зчленування напрямку, йому присвоюється знак "-". На Фіг.4A-4F подані діаграми, що ілюструють рейтинги деяких положень руки. У прикладі, наведеному на Фіг.4А, показано, що рука, відведена назад під кутом від 0° до -20° відносно до торса манекена 10, відповідає рейтингу положення, рівному -1. На Фіг.4В показано, що рука, відведена назад під кутом, меншим за -20° (наприклад, рівним -30°), відповідає рейтингу положення, рівному -2. На Фіг.4С показано, що рука, винесена вперед під кутом від 0° до +20°, відповідає рейтингу положення, рівному +1. На Фіг.4D показано, що рука, винесена вперед під кутом від +20° до +45°, відповідає рейтингу положення, рівному +2. На Фіг.4Е показано, що рука, винесена вперед під кутом від +45° до +90°, відповідає рейтингу положення, рівному +3. Нарешті, на Фіг.4Е показано, що рука, винесена вперед під кутом, що перевищує +90°, відповідає рейтингу положення, рівному +4. 89155 14 На Фіг.5A-5D наведені рейтинги положень передпліччя. Передпліччя, розташоване під кутом від 0° до +60° відносно до плеча, відповідає рейтингу положення, рівному +2 (Фіг.5А); передпліччя, розташоване під кутом від +60° до +80°, - рейтингу положення, рівному +1 (Фіг.5В); передпліччя, розташоване під кутом від +80° до +100°, - рейтингу положення, рівному -1 (Фіг.5С); нарешті, передпліччя, розташоване під кутом, що перевищує +100°, відповідає рейтингу положення, рівному -2 (Фіг.5D). На Фіг.6А-6Е наведені рейтинги положень зап'ястя манекена 10. Зап'ястя, вирівняне з передпліччям, тобто розташоване відносно передпліччя під кутом, рівним 0°, відповідає рейтингу положення, рівному +1 (Фіг.6А); зап'ястя, розташоване під кутом від 0° до +15° відносно передпліччя, - рейтингу положення, рівному +2 (Фіг.6В); зап'ястя, розташоване під кутом від 0° до -15°, - рейтингу положення, рівному -2 (Фіг.6С); зап'ястя, розташоване під кутом, що перевищує +15°, - рейтингу положення, рівному +3 (Фіг.6Е); нарешті, зап'ястя, розташоване під кутом меншим за -15°, відповідає рейтингу положення, рівному -3 (Фіг.6Е). Проте методика RULA обмежується лише основними ступенями свободи, причому деяким ступеням свободи рейтинги не приписані. Внаслідок цього ступеням свободи, що не мають визначеного рейтингу RULA (наприклад, ключичному суглобу) у способі за винаходом приписуються рейтинги, рівні +1, 0 і -1 відповідно до переміщення даного зчленування. Таким чином, зручність положення оцінюється з високою точністю. Додатково, кожного ступеня свободи зчленування 12 манекена 10 для уникнення коливань зчленування навколо положення зміни знака алгебраїчного рейтингу приписується нульовий рейтинг, що діє у відкритому інтервалі навколо цього положення, причому величина цього інтервалу дорівнює кроку зміщення даного зчленування, визначеному для відповідного ступеня свободи. Таким чином, спосіб і система за винаходом дозволяють створити матрицю або вектор алгебраїчних рейтингів положень для всіх ступенів свободи і всіх зчленувань манекена в кожний момент часу. Цей вектор може бути сформований, як описано вище, на основі методики RULA або з використанням будь-якої іншої методики оцінки положень. У подальшому описі припускається, що цей вектор нормований за допомогою будь-якого з застосувань нормування, що визначають ту саму топологію. Наприклад, може бути виконане нормування на безкінечність. Для цього всі складові вектори рейтингів положень діляться на абсолютне значення найбільшої з цих складових, причому утворюється вектор з нормою 1, отриманою нормуванням на безкінечність. Це нормування зберігає відносне значення алгебраїчних рейтингів RULA, визначених для кожного зчленування 12 манекена 10. Потім вектор рейтингів положень зважується з коефіцієнтами, пропорційними кроку або крокам зміщення зчленувань манекена 10. 15 Крок зміщення зчленування може бути визначений заздалегідь відповідно до типу зчленування. Наприклад, ліктьовому суглобу може бути приписаний інший крок, аніж зчленуванню зап'ястя. В цьому випадку кожний компонент нормованого вектора рейтингів положень помножується на відповідний крок зміщення зчленування, в результаті чого утворюється вектор зважених рейтингів положень. Крок зміщень зчленувань також може бути постійним для всіх зчленувань 12. У цьому випадку для одержання вектора зважених рейтингів положень достатньо помножити нормований вектор рейтингів положень на цю постійну величину кроку зміщень зчленувань. Зрозуміло, крок зміщень зчленувань може бути вибраний настільки малим, наскільки дозволяють методи чисельних розрахунків. Невелика величина кроку зміщення підвищує чіткість руху зчленувань 12, але одночасно збільшує час, що витрачається на обчислення. Таким чином, крок зміщення зчленування, що відповідає куту, що складає від 0,001 до 0,1 рад, являє собою гарний компроміс між швидкістю обчислень і оптимальним моделюванням рухів манекена. Нарешті, внесок ергономічного агента визначається шляхом зміни знака вектора зважених рейтингів положень. Іншими словами, внесок ергономічного агента являє собою вектор, складений з величин, зворотних рейтингам положень для кожного зчленування. Так, якщо рейтинг негативний, зчленування зміщується в позитивному напрямку і навпаки. Це дозволяє мінімізувати рейтинг положення зчленування шляхом уведення поправки, пропорційної значенню цього рейтингу; тобто що більше абсолютне значення рейтингу положення зчленування, то більше значення в глобальному внеску має внесок зміни положення цього зчленування. Розглянемо, наприклад, манекен, рука якого займає положення, що відповідає куту в 90° ( /2рад), передпліччя знаходиться під кутом у 30° ( /2 рад), а зап'ястя - під кутом у -20° ( /9 рад). Відповідно до рейтингів положень, наведених на Фіг.4А-6Е, алгебраїчний вектор RULA для руки, передпліччя і зап'ястя складає (+4; +2; -3). Тоді нормований вектор дорівнює (1; 1/2; -3/4); якщо крок зміщення зчленування дорівнює, наприклад, 0,01 рад, нормований вектор зважених рейтингів положень має вигляд (0,01; 0,005; -0,00075), а внесок ергономічного агента задається, отже, вектором (-0,01; -0,005; +0,00075). Цей приклад показує, що ергономічний агент швидше впливає на ті зчленування, положення яких менш зручне. Дійсно, на Фіг.7A-7D проілюстрована послідовність корекції положення манекена 10 під впливом тільки ергономічного агента, тобто без внеску агентів притягання або зміщення. На Фіг.7А зображене вихідне положення, украй незручне і навіть небезпечне, при якому спина має рейтинг положення, рівний 6. З Фіг.7В видно, що це вихідне положення спини швидко виправляється. Нарешті, послідовно проходячи через положення Фіг.7С, 89155 16 ергономічний агент приводить манекен у зручне положення (Фіг.7D) з найменшим рейтингом RULA. Згідно з даним винаходом внесок ергономічного агента 34 у глобальний внесок, що впливає на манекен 10, розраховується автоматично з частотою, визначеною рівнем активності, приписаним ергономічному агенту 34. Оскільки оптимізація положення є менш пріоритетною задачею, ніж запобігання зіткненням або тяжіння, наприклад, кистей рук манекена до цілі, цьому ергономічному агенту 34 присвоюється високий рівень активності, тобто низька частота. В загальному випадку агенти зміщення мають найнижчий рівень активності, а ергономічний агент - найвищий. Рівень активності агента зміщення може бути вибраний рівним, наприклад, 1 або 2, рівень активності агента притягання - рівним цілому числу в межах від 2 до 4, рівень активності керуючого агента - рівним цілому числу в межах від 2 до 4, а рівень активності ергономічного агента - рівним цілому числу в межах від 5 до 15. Так, якщо рівень активності ергономічного агента 34 дорівнює десятьом, внесок цього агента обчислюється й застосовується до манекена 10 один раз за кожні десять етапів обчислень. На Фіг.8 подана блок-схема, що ілюструє основні етапи багатофакторного цифрового способу моделювання переміщень віртуального манекена 10 у віртуальному середовищі (див. також попередні креслення) відповідно до винаходу. На етапі S0 відбувається ініціалізація блоксхеми, на якій визначені різноманітні параметри. Наприклад, ініціалізується лічильник "С" тактових імпульсів або етапів обчислень моделювання (тобто йому присвоюється значення С=0). Крім того, на етапі S0 можуть бути визначені відносні пріоритети агентів, оскільки ці агенти використовують ті самі чисельні дані і взаємодіють один з одним ієрархічним чином. При цьому кожному агенту приписується певний рівень активності, що виражається ненульовим натуральним числом і обернено пропорційний частоті дій цього агента. Рівень активності кожного агента може змінюватися в ході моделювання переміщень манекена 10 залежно, наприклад, від ступеня захаращеності середовища, що оточує манекен, і відстані до наміченої цілі. В даному прикладі для простоти демонстрації агенти 22, 32 притягання, агенти 21, 31 зміщення, керуючі агенти 23, 33 й ергономічний агент 34 розставлені в ієрархічному порядку шляхом приписування кожному з них рівня активності, що залишається постійним під час усього переміщення манекена 10. Таким чином, рівні активності агентів 22, 32 притягання, агентів 21, 31 зміщення, керуючих агентів 23, 33 й ергономічного агента 34 визначаються, відповідно, цілими натуральними числами 1, m, n і p. На етапі S0 також можуть бути визначені кроки лінійного переміщення манекена і його поворотів навколо вертикальної осі. Для кожного зчленування 12 можна вибрати перемінний крок, що залежить, наприклад, від відстані між манекеном 10 і ціллю 13. Також, залежно від типу зчленувань 12, 17 їм можуть бути приписані різноманітні кроки. Проте можна вибрати й постійний крок, оптимальний для всіх зчленувань 12 впродовж усієї траєкторії руху манекена 10. На етапі S1 виконується перевірка кратності значення лічильника величині 1, тобто перевіряється, чи дорівнює нулю залишок від поділу значення лічильника на величину 1 (С=0 mod 1). В разі позитивної відповіді на етапі S2, до переходу до наступного етапу S3, виконується вирахування внеску агентів 22, 32 притягання. Наприклад, якщо 1=3, внесок агента притягання вираховується через кожні три тактові імпульси, тобто коли значення лічильника дорівнює 3,6,9 тощо. Якщо ж ця умова не виконується, відбувається прямий перехід на етап S3, на якому перевіряється кратність значення лічильника величині m (C=0 mod m). У разі позитивної відповіді на етапі S4, до переходу до наступного етапу S5, виконується вирахування внеску агентів 21,31 зміщення. Якщо ж ця умова не виконується, відбувається прямий перехід на етап S5, на якому перевіряється кратність значення лічильника величині n (C=0 mod n). У випадку позитивної відповіді на етапі S6, до переходу до наступного етапу S7, здійснюється вирахування внеску керуючих агентів 23, 33 (етапи S5 і S6 є необов'язковими). Якщо ж ця умова не виконується, відбувається прямий перехід на етап S7, на якому перевіряється кратність значення лічильника величині р (С=0 mod p). У разі позитивної відповіді на етапі S8, до переходу до наступного етапу S9, здійснюється вирахування внеску ергономічного агента 34 по вектору, складеному з величин, обернених рейтингам положень для кожного зчленування. В даному прикладі коригування положення манекена виконується автоматично через кожні р етапів обчислень. Якщо значення лічильника на етапі S7 не кратне величині р, відбувається прямий перехід на 89155 18 етап S9, на якому загальний внесок агентів застосовується до манекена 10 для його переміщення або руху відповідно до розрахунків, зроблених на попередніх етапах. На етапі S10 значення лічильника збільшується (С=С+1), після чого відбувається повернення на етап S1. Таким чином, багатофакторна система за винаходом містить, щонайменше, один агент 22, 32 притягання, щонайменше, один агент 21, 31 зміщення (можливо, щонайменше, один керуючий агент 23, 33) і, щонайменше, один ергономічний агент 34, що забезпечує можливість автоматичного коригування ергономіки манекена 10 протягом траєкторії його руху. На Фіг.9A-9D зображена послідовність, що ілюструє переміщення манекена 10 за участю ергономічного агента від вихідного положення (Фіг.9А) до кінцевого положення (Фіг.9D), у якому руки манекена 10 досягають цілі, що являє собою дві ручки 13а, 13b. З другого боку, на Фіг.10A-10D зображена послідовність, яка ілюструє переміщення манекена 10 без участі ергономічного агента від вихідного положення (Фіг.10А) до кінцевого положення (Фіг.10D), менш зручного, ніж положення, зображене на Фіг.9D, у якому руки манекена 10 також досягають двох ручок 13а, 13b. Оптимізація ергономіки на Фіг.9A-9D породжує зміни внутрішніх ступенів свободи манекена 10, що збільшують зручність його проміжних положень протягом усієї траєкторії його руху. Така зміна внутрішніх ступенів свободи впливає на загальне положення манекена 10 завдяки впливу агентів притягання. Дійсно, з порівняння Фіг.9В-9D з Фіг.10В-10D очевидно, що зручні положення, що приймаються манекеном 10 унаслідок оптимізації ергономіки, приводять до віддалення рук манекена 10 від їхніх цілей, відповідно, 13а, 13b, що пізніше компенсується загальним притяганням (наближенням) манекена 10 до цих цілей 13а, 13b. 19 89155 20 21 89155 22 23 89155 24 25 Комп’ютерна верстка М. Мацело 89155 Підписне 26 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and human performance modelling system in specified environment
Автори англійськоюMay Brunot, Ramstin Eduard, Chedmail Patrick
Назва патенту російськоюСпособ и система для моделирования действий человека в указанной среде
Автори російськоюМай Брюно, Рамстен Эдуар, Шедмай Патрик
МПК / Мітки
МПК: G09B 23/00, G06T 15/00, G06T 17/00
Мітки: спосіб, середовищі, визначеному, дій, система, людини, моделювання
Код посилання
<a href="https://ua.patents.su/13-89155-sposib-ta-sistema-dlya-modelyuvannya-dijj-lyudini-u-viznachenomu-seredovishhi.html" target="_blank" rel="follow" title="База патентів України">Спосіб та система для моделювання дій людини у визначеному середовищі</a>
Спосіб диференціації стромальних стовбурових клітин людини у культуральному середовищі in vitro
Номер патенту: 81564
Опубліковано: 10.01.2008
Автор: Астахова Віра Семенівна
МПК: C12N 15/08, C12N 13/00, A61K 35/12, A61K 35/28
Мітки: клітин, стовбурових, диференціації, спосіб, людини, стромальних, середовищі, vitro, культуральному
Формула / Реферат:
1. Спосіб диференціації стромальних стовбурових клітин людини у культуральному середовищі, який передбачає приготування суспензії клітин кісткового мозку з видалених кісток людини, визначення концентрації ядровмісних клітин за загальноприйнятою методикою, додавання одержаної суспензії у культуральне середовище для культивування стовбурових клітин, який відрізняється тим, що для диференціації стовбурових стромальних клітин людини in vitro...
Спосіб переміщення віртуального об’єкта у віртуальному навколишньому середовищі без взаємних перешкод між його зчленованими елементами
Номер патенту: 88757
Опубліковано: 25.11.2009
Автори: Шедмай Патрік, Майє Брюно, Рамстаін Едуар
МПК: G06T 17/40, B25J 9/16
Мітки: зчленованими, переміщення, середовищі, віртуальному, елементами, перешкод, взаємних, віртуального, об'єкта, спосіб, навколишньому
Формула / Реферат:
1. Спосіб переміщення віртуального зчленованого об'єкта, шляхом виконання послідовності елементарних переміщень у віртуальному просторі (13) віртуального зчленованого об'єкта (10), що містить сукупність зчленованих елементів (11), зв'язаних між собою сукупністю зчленувань (12), з визначенням відносних положень зчленованих елементів (11) через кути зчленувань відповідно до ступенів свободи, причому спосіб включає такі етапи:-...
Спосіб моделювання мікроскопічних структур чоловічої статевої системи в пренатальному періоді онтогенезу людини
Номер патенту: 19646
Опубліковано: 15.12.2006
Автори: Пішак Василь Павлович, Козуб Микола Миколайович, Хмара Тетяна Володимирівна
МПК: G09B 23/28
Мітки: пренатальному, періоди, онтогенезу, статевої, людини, системі, мікроскопічних, моделювання, чоловічої, спосіб, структур
Формула / Реферат:
Спосіб моделювання мікроскопічних структур чоловічої статевої системи в пренатальному періоді онтогенезу людини шляхом виготовлення графічних зображень пошарових гістологічних зрізів загальної форми органа, який відрізняється тим, що додатково перед виготовленням реконструкції загальної форми органа проводять виготовлення пластичної реконструкції порожнин органа вирізанням із загального контуру моделей зрізів порожнин тих самих пластинок.
Спосіб 3d моделювання мікроскопічних структур ділянки хребетного стовпа в пренатальному періоді онтогенезу людини
Номер патенту: 26966
Опубліковано: 10.10.2007
Автори: Кривецький Віктор Васильович, Кривецька Інна Іванівна
МПК: G09B 23/28
Мітки: структур, спосіб, онтогенезу, хребетного, пренатальному, періоди, моделювання, людини, ділянки, мікроскопічних, стовпа
Формула / Реферат:
1. Спосіб 3D моделювання мікроскопічних структур ділянки хребта людини у пренатальному періоді онтогенезу людини шляхом отримання зображення послідовних гістологічних зрізів та їх співставлення, який відрізняється тим, що зображення послідовних гістологічних зрізів хребта отримують за допомогою цифрового фотоапарата, зберігають їх на цифрових носіях, калібрують та обробляють за допомогою комп'ютерних програм, а співставлення зображення...
Спосіб ініціалізації моделювання поведінки технічної установки і система моделювання для технічної установки
Номер патенту: 48294
Опубліковано: 15.08.2002
Автор: Фен Томас
МПК: F01K 13/00, G05B 17/00, G06F 17/50
Мітки: ініціалізації, поведінки, спосіб, установки, система, моделювання, технічної
Формула / Реферат:
1. Спосіб ініціалізації моделювання поведінки технічної установки, що містить ряд компонент, який відрізняється тим, що для кожної компоненти відповідно ідентифікують тип компоненти, який схемотехнічно охарактеризований кількістю входів і кількістю виходів відповідно для одного параметра, і для компоненти на основі відкладеної специфічної для типу компоненти структури струму сигналу для параметра кожного виходу встановлюють чи потрібно...
Попередній патент: Спосіб одержання гідрогелю метилкремнієвої кислоти
Наступний патент: Газотурбінний двигун, наприклад авіаційний турбореактивний двигун
Випадковий патент: Пристрій для дії на призабійну зону свердловини