Спосіб пошуку широкосмугового сигналу
Номер патенту: 91862
Опубліковано: 25.07.2014
Автори: Головань Олена Вікторівна, Харченко Віктор Миколайович, Коновальчик Олександр Степанович, Вдовиченко Єгор Іванович, Хачатуров Валерій Рубенович
Формула / Реферат
Спосіб пошуку широкосмугового сигналу (ШСС), який полягає в тому, що здійснюють послідовний пошук по області невизначеності, кожна позиція якої відповідає деякому набору невідомих параметрів сигналу, причому пошук ШСС на кожній позиції області невизначеності здійснюють послідовно в етапів, при цьому обчислюють кореляцію між вхідним і опорним сигналами, утворюючи величини оцінок кореляції на і послідовних інтервалах когерентності ШСС, відповідних поточному - і-му етапу пошуку, формують вирішальну величину поточного і-го етапу пошуку як суму оцінок кореляції , отриманих на поточному і всіх попередніх етапах пошуку, сформовану вирішальну величину аналізують шляхом порівняння з вибраним порогом і приймають рішення про наявність ШСС зі значеннями параметрів, відповідними поточній позиції області невизначеності, пошук продовжують до досягнення останньої позиції області невизначеності, якщо прийнято рішення про те, що на повному циклі сканування сигнал не виявлено, то пошук поновлюється з першої позиції, який відрізняється тим, що після отримання оцінок кореляції між вхідним і опорним сигналами формують першу вирішальну величину , що відповідає енергії сигналу на інтервалі багатопроменевості, шляхом некогерентного накопичення оцінок на послідовних інтервалах часу в області невизначеності, область невизначеності за часом перетворюють, групуючи послідовних інтервалів часу, на яких отримана оцінка в один інтервал, і, привласнюючи йому відповідний номер, формують другу вирішальну величину поточного етапу пошуку шляхом некогерентного накопичення значень першої вирішальної величини , отриманих на поточному q-му циклі і на попередніх повних циклах сканування області невизначеності, виявляють повторюваність номеру інтервалу області невизначеності пошуку з максимальним значенням другої вирішальної величини на декількох повних циклах сканування області невизначеності, якщо номер позиції перетвореної області невизначеності повторюється раз на послідовних повних циклах сканування або номер позиції повторюється раз поспіль, то приймають рішення про виявлення сигналу, який спостерігається, зупиняють пошук і фіксують номер позиції області невизначеності.
Текст
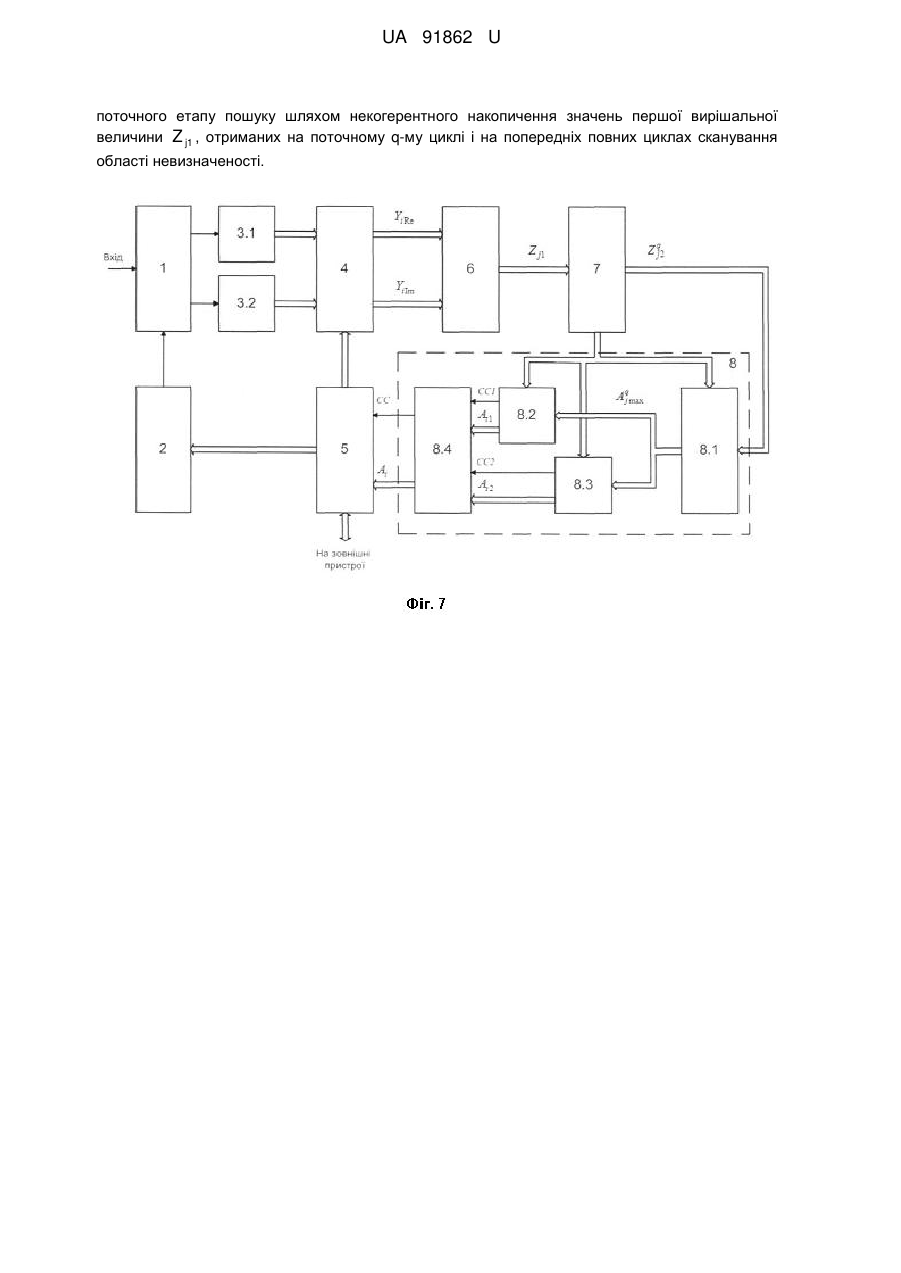
Реферат: Спосіб пошуку широкосмугового сигналу (ШСС) полягає в тому, що здійснюють послідовний пошук по області невизначеності, кожна позиція якої відповідає деякому набору невідомих параметрів сигналу, причому пошук ШСС на кожній позиції області невизначеності здійснюють послідовно в q етапів. При цьому обчислюють кореляцію між вхідним і опорним сигналами, утворюючи величини оцінок кореляції Y на і послідовних інтервалах когерентності ШСС, відповідних поточному - і-му етапу пошуку, формують вирішальну величину Z i поточного і-го етапу пошуку як суму оцінок кореляції Y , отриманих на поточному і всіх попередніх етапах пошуку, сформовану вирішальну величину Z i аналізують шляхом порівняння з вибраним порогом і приймають рішення про наявність ШСС зі значеннями параметрів, відповідними поточній позиції області невизначеності, пошук продовжують до досягнення останньої позиції області невизначеності, якщо прийнято рішення про те, що на повному циклі сканування сигнал не виявлено, то пошук поновлюється з першої позиції. Після отримання оцінок кореляції між вхідним і опорним сигналами формують першу вирішальну величину Z j1 , що відповідає енергії сигналу на інтервалі багатопроменевості, шляхом некогерентного накопичення оцінок Y на l послідовних інтервалах часу в області невизначеності, область невизначеності за часом перетворюють, групуючи l послідовних інтервалів часу, на яких отримана оцінка Z j1 в один інтервал, і, привласнюючи йому відповідний номер, формують другу вирішальну величину Zq2 j UA 91862 U (12) UA 91862 U поточного етапу пошуку шляхом некогерентного накопичення значень першої вирішальної величини Z j1 , отриманих на поточному q-му циклі і на попередніх повних циклах сканування області невизначеності. UA 91862 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до області радіотехніки, зокрема до способів і пристроїв пошуку широкосмугового сигналу в системах зв'язку з кодовим розділенням каналів (CDMA). Задачею, на вирішення якої спрямовано заявлену корисна модель (спосіб пошуку широкосмугового сигналу і пристрій для його реалізації), є підвищення ймовірності правильного виявлення при заданій ймовірності помилкової тривоги, а також скорочення часу пошуку в умовах впливу комплексу негаусівських і нестаціонарних перешкод і багатопроменевого розповсюдження радіохвиль. Ця задача вирішується за рахунок накопичення енергії сигналу на інтервалі багатопроменевості і виявлення повторюваності номера позиції області невизначеності пошуку з максимальним значенням вирішальної величини на декількох повних циклах сканування області невизначеності. Корисна модель включає пристрій для реалізації запропонованого способу пошуку широкосмугового сигналу, що містить: квадратурний демодулятор; синтезатор частот; аналогоцифрові перетворювачі квадратур; програмований цифровий узгоджений фільтр (ПЦУФ), блок управління і синхронізації; блок обчислення квадрата модуля відгуку ПЦУФ; блок некогерентного накопичення на інтервалі багатопроменевості; блок некогерентного накопичення; блок прийняття рішення, що включає модуль виявлення наявності повторень номера позиції області невизначеності пошуку сигналу з максимальним значенням другої вирішальної величини, модуль, який реалізує перевірку "m - кратне повторення поспіль", модуль, який реалізує перевірку наявності повторення "k з n", модуль, який забезпечує вибір каналу, в якому раніше виявлено факт повторення номера позиції області невизначеності. Технічний результат, що досягається при реалізації заявленого винаходу, полягає у підвищенні ймовірності правильного виявлення сигналу при заданій ймовірності помилкової тривоги і скорочення часу пошуку в умовах впливу комплексу негаусівських і нестаціонарних перешкод і багатопроменевого розповсюдження радіохвиль. Корисна модель належить до області радіотехніки, зокрема до способів і пристроїв пошуку широкосмугового сигналу в системах зв'язку з кодовим розділенням каналів (CDMA). Відомі системи стільникового зв'язку CDMA перевершують інші системи за такими параметрами, як ємність, частотне планування, якість зв'язку, скритність і захист від несанкціонованого доступу, стійкість до впливу негаусівських перешкод. Однією з найбільш серйозних проблем при розробці систем зв'язку CDMA є необхідність точної синхронізації вхідних і опорних сигналів. На першому етапі встановлення синхронізації, як правило, проводиться пошук, в результаті якого отримують попередню оцінка параметрів сигналу що приймається (фази PN коду, частоти та ін.). При цьому саме на пошук затрачуються значні часові та апаратні ресурси. При пошуку перевіряються гіпотези про наявність сигналу з тим чи іншим набором параметрів. При цьому обчислюються значення оцінки кореляції вхідного і опорного сигналів при всіх можливих значеннях параметрів сигналу що виявляється (фази PN коду, частоти тощо) з деякої, заздалегідь відомої, множини. Ця множина називається областю невизначеності пошуку. Існують різні способи, спрямовані на скорочення часу пошуку і підвищення достовірності виявлення широкосмугового сигналу в системах зв'язку з кодовим розділенням каналів. До них можна віднести паралельну обробку сигналу декількома каналами пошуку (див. "Performance Evaluation of Parallel Acquisition in Cellular DS/CDMA Reverse Link", Bub-Joo Kang and others: Signal Processing Section, Mobile Communication Research Division, Korea. / Proc. November, 1995, pp. 47-51) [1] і використання узгоджених фільтрів (див. "Simple Schemes for Parallel Acquisition of Spreading Sequences in DS/SS Systems", Meera Srinivasan, Dilip. V. Sarawatc/ IEEE Transaction on Vehicular Technology, Vol. 45, 3, August 1996, pp. 593-598) [2]. Різні комбінації цих способів описані в наступних джерелах інформації: "An Improved Hybrid PN Code Acquisition for CDMA Personal Wireless Communications", Weihua Zhang. /Proc. PIMRC'95, pp. 995-999 [3] і "A Unified Approach to Serial Search Spread Spectrum Code Acquisition", A. Polidoros and S. L Veber Parts I, II IEEE Trans. Commun., Vol. COM-32, pp. 542-560, May 1984 [4]. При послідовному скануванні області невизначеності застосовуються способи скорочення часу пошуку, засновані на застосуванні багатоетапних процедур прийняття рішення (див. "Устройство поиска шумоподобного сигнала". Авторское свидетельство SU. 1356229, В.Н. Осьмак, С.Н. Смирнов, А.Н. Ступин, 1973 г.) [5]. Максимальний виграш забезпечує послідовна процедура. Проте послідовна процедура вимагає високої точності при формуванні порогів прийняття рішення. Багато способів, що спрямовані на скорочення часу пошуку і підвищення достовірності виявлення широкосмугового сигналу в системах зв'язку з кодовим розділенням каналів, засновані на обчисленні оцінок кореляції на послідовних інтервалах області невизначеності сигналу, формуванні вирішальної величини і порівнянні її із заданою величиною порогу (див. 1 UA 91862 U 5 10 15 20 25 30 35 40 45 50 55 "CDMA Principles of Spread Spectrum Communication", Andrew J. Viterbi, Addison-Wesley Communication Series. 1995, p. 58-59 [6]). Загальним недоліком даних способів і пристроїв, побудованих на їх основі, є використання порівняння з порогами вирішальної величини, пропорційної значенням оцінки кореляції вхідного і опорного сигналів, для множини позицій області невизначеності. Істотна невизначеність та змінність рівнів прийнятих сигналів і перешкод, а також швидкі завмирання сигналів призводять до неправильного вибору порогів прийняття рішення і, як наслідок, до суттєвого збільшення ймовірності помилкової тривоги при заданій достовірності виявлення сигналу. Крім того, для підвищення достовірності виявлення номеру позиції області невизначеності з максимальним значенням вирішальної величини, в цих способах пошуку не ефективно використовується багатопроменевий характер поширення радіохвиль, який забезпечує принципову можливість накопичення енергії сигналу, що приходить в точку прийому різними шляхами. Найбільш близьким технічним рішенням (прототипом) до заявленого способу пошуку широкосмугового сигналу є спосіб пошуку сигналу, описаний в Патенті Росії № 2178620, 2002 р. [7]. Даний спосіб передбачає таку послідовність дій. Здійснюють послідовний пошук по області невизначеності, кожна позиція якої відповідає деякому набору невідомих параметрів сигналу. Обчислюють кореляцію між вхідним і опорним сигналами, утворюючи величини оцінок кореляції Yi на Мi послідовних інтервалах когерентності сигналу, відповідних поточному і-го етапу пошуку. Формують вирішальну величину Zi поточного і-го етапу пошуку як суму оцінок кореляції Yі, отриманих на поточному і всіх попередніх етапах пошуку. Сформовану вирішальну величину Z i порівнюють із заданою величиною порогу. За результатами порівняння приймають рішення про наявність чи відсутність сигналу. Застосування багатоетапної процедури прийняття рішення, стратегії повного циклу сканування та адаптації рівнів порогів дозволяє поліпшити характеристики виявлення в порівнянні з методами, які передбачають застосування порогів постійних рівнів. Однак, в умовах швидко мінливих умов поширення радіохвиль (характеристик багатопроменевості та рівня сигналу в точці прийому), а також при впливі нестаціонарних і негаусівських перешкод, встановити оптимальні пороги прийняття рішення не представляється можливим. У цих умовах, через невідповідність рівнів порогів необхідним значенням, середній час пошуку і ймовірність неправильного виявлення ("помилкової тривоги") істотно збільшуються. Слід також зауважити, що навіть при повному циклі сканування, що використовується в прототипі, можна виявити тільки один інтервал області невизначеності, в якому фіксується максимальне значення вирішальної величини Zi, яка відповідає променю з максимальною інтенсивністю, що спостерігається на інтервалі багатопроменевості. У той же час відомо (див. Волков Л.Н., Немировский М.С., Шинаков Ю.С. Системы цифровой радиосвязи: базовые методы и характеристики: Учеб. пособие. - М.: Эко-Трендз, 2005.-392с.:ил. - [8], а також Anntx С (normative): Propagation conditions. - ETSI: EN 300910 V8.5.1 (GSM 05.05, version 8.5.1 Release 1999)(2000-11) - [9]), що інтервал багатопроменевості в залежності від характеру місцевості змінюється від 0,4 мкс до 20 мкс, а основна частка енергії сигналу зосереджена в 6 променях на інтервалі 0,8 мкс. При ширині спектра сигналу 10 МГц один інтервал області невизначеності за затримкою не перевищує 0,1 мкс з чого випливає, що при виявленні сигналу за методом, описаним в прототипі, використовується тільки частина енергії сигналу в точці прийому (енергія одного променя). Якщо ж ширина спектра сигналу значно менше 10 МГц, то між променями в точці прийому виникне інтерференція (завмирання сигналів), яка істотно знижує імовірність виявлення сигналів при фіксованій ймовірності помилкових тривог. Таким чином, невідповідності рівнів порогів прийняття рішення необхідним значенням в умовах впливу комплексу негаусівських і нестаціонарних перешкод і багатопроменевого розповсюдження, а також неповне використання енергії сигналу є основними недоліками прототипу. Задачею, на вирішення якої спрямовано заявлену корисна модель (спосіб пошуку широкосмугового сигналу і пристрій для його реалізації), є підвищення ймовірності правильного виявлення при заданій ймовірності помилкової тривоги, а також скорочення часу пошуку в умовах впливу комплексу негаусівських і нестаціонарних перешкод і багатопроменевого розповсюдження радіохвиль. Ця задача вирішується за рахунок накопичення енергії сигналу на інтервалі багатопроменевості і виявлення за заданим критерієм (критеріями) повторюваності номера позиції області невизначеності пошуку з максимальним значенням вирішальної величини на декількох повних циклах сканування області невизначеності. Поставлена задача вирішується наступним чином 2 UA 91862 U 5 10 15 Здійснюють послідовний пошук по області невизначеності, кожна позиція якої відповідає деякому набору невідомих параметрів сигналу, загальна кількість яких дорівнює M L N , де L - кількість позицій області невизначеності за частотою, а N - кількість позицій області невизначеності за часом. Вибирають номер позиції в області невизначеності і обчислюють кореляцію між вхідним і опорним сигналами, утворюючи величини оцінок кореляції Yi на Mi послідовних інтервалах когерентності сигналу. Структура повного циклу сканування області невизначеності по частоті і часу представлена на фіг. 1. Формують першу вирішальну величину Zj1, відповідну енергії сигналу на інтервалі багатопроменевості, шляхом некогерентного накопичення оцінок Yi на l послідовних інтервалах часу (інтервалі багатопроменевості) в області невизначеності. Область невизначеності за часом перетворюють, групуючи i послідовних інтервалів часу, на яких отримана оцінка Zj1, в один, і привласнюючи йому відповідний номер. При цьому кількість інтервалів невизначеності зменшується в l разів, а номер поточного часового інтервалу позначається як j - й, де j 1 2, 3 ...L N / l . Структура повного циклу сканування області невизначеності після даного , перетворення представлена на фіг. 2. Часові діаграми формування оцінок Zj1 при l=16 на одній частотній позиції, де фактично спостерігається сигнал, представлені на фіг. 3. Для підвищення ймовірності виявлення сигналу при малих відношеннях сигнал/шум, формують другу вирішальну величину 20 Zq2 поточного етапу пошуку шляхом некогерентного j вагового підсумовування з вагою α ≤ 1 значень першої вирішальної величини Zj1, отриманих на кожному часовому інтервалі в поточному q циклі і на попередніх повних циклах сканування області невизначеності. При використанні цифрового рециркулятора друга вирішальна величина дорівнює: q Z q2 r Z q1r . j j r 0 25 Часова діаграма отриманих оцінок Аналізуючи отримані оцінки 30 Zq2 представлена на фіг. 4. j Zq2 , виявляють повторюваність номера позиції області j невизначеності пошуку з максимальним значенням другої вирішальної величини на декількох повних циклах сканування. Якщо на послідовних циклах сканування номер позиції повторюється m разів поспіль або на послідовних n циклах сканування номер позиції області невизначеності повторюється k разів, то приймають рішення про те, що спостережуваний сигнал має потрібні параметри, а основна частина прийнятої енергії знаходиться у відповідній зоні багатопроменевості, що містить l послідовних інтервалів області невизначеності за часом. На фіг. 5 представлена часова діаграма формування оцінок 35 40 45 50 Zq2 , на якій другий номер j позиції повторюється 3 рази поспіль на 3-х повних циклах сканування часової області невизначеності на частотній позиції, де спостерігається корисний сигнал, після чого формують ознака "Є сигнал" (ЄС) за критерієм "3 поспіль". На фіг. 6 представлена часова діаграма, на якій другий номер позиції повторюється 3 рази на n повних циклах сканування часової області невизначеності, після чого за критерієм "3 з n" формують ознаку ЄС. Після прийняття рішення "Є сигнал" зупиняють пошук і фіксують номери позицій часового і частотного інтервалів області невизначеності. У разі відсутності багатопроменевого розповсюдження, вибирають l=1 і, таким чином, Zj1=Yi, а кількість позицій невизначеності залишається рівною М. У цьому випадку основною відмінністю від прототипу залишається правило прийняття рішення, засноване на виявленні повторюваності номера позиції області невизначеності пошуку з максимальним значенням вирішальної величини на декількох повних циклах сканування. Пристрій пошуку широкосмугового сигналу, який реалізує спосіб-прототип, містить корелятор, генератор опорних сигналів, блок некогерентного накопичення, блок управління і синхронізації і блок прийняття рішення, при цьому перший вхід корелятора є сигнальним входом пристрою, другі входи корелятора з'єднані з виходами генератора опорних сигналів, вихід корелятора з'єднаний з входом блока некогерентного накопичення, вихід якого підключений до першого входу блока прийняття рішення, другий вхід якого з'єднаний з першим виходом блока управління і синхронізації, який є для блока прийняття рішення керуючим, другий вихід блока управління і синхронізації з'єднаний з входом генератора опорних сигналів, 3 UA 91862 U 5 10 15 20 25 30 перший вихід блока прийняття рішення з'єднаний з входом блока управління і синхронізації, а другий його вихід є виходом пристрою. Для реалізації заявленого способу пошуку широкосмугового сигналу в заданій області невизначеності пропонується пристрій, який містить: квадратурний демодулятор 1; синтезатор частот 2; аналого-цифрові перетворювачі квадратур 3.1 та 3.2; програмований цифровий узгоджений фільтр 4; блок управління і синхронізації 5; блок некогерентного накопичення на інтервалі багатопроменевості 6; блок некогерентного накопичення 7; блок прийняття рішення 8, що включає модуль виявлення наявності повторень номера позиції області невизначеності пошуку сигналу з максимальним значенням другої вирішальної величини 8.1, модуль, який реалізує виявлення повторення номера позиції області невизначеності пошуку сигналу з максимальним значенням другої вирішальної величини за критерієм "m - кратне повторення поспіль" 8.2; модуль, який реалізує виявлення повторення номера позиції області невизначеності пошуку сигналу з максимальним значенням другої вирішальної величини за критерієм "k з n" 8.3; модуль, який забезпечує передачу на входи блока управління та синхронізації ознаки "Є сигнал" (ЄС) і номери повторюваної позиції області невизначеності, які були виявлені першими 8.4. Структурна схема даного пристрою представлена на фіг. 7. Схеми квадратурного демодулятора, синтезатора частот і аналого-цифрового перетворювача є відомими. Програмований цифровий узгоджений фільтр може бути реалізований за схемою (див. Кузьмин С.З. Основы проектирования систем цифровой обработки информации. - М: Радио и связь, 1986. - 352 с. - [11]), представленій в [11] (рис. 1.9 на стор. 50). Блок некогерентного накопичення квадратів модуля згортки на l послідовних інтервалах області невизначеності за часом (зоні багатопроменевості) може бути реалізований на програмованій логічній інтегральній схемі (ПЛІС) у відповідності зі схемою на RTL-рівні, що представлена на фіг. 8, де DD1 - блок обчислення квадрата модуля згортки на поточному інтервалі області невизначеності за часом, a DD1 - блок некогерентного накопичення квадратів модуля згортки на l послідовних інтервалах області невизначеності за часом. Блок некогерентного накопичення (вагового підсумовування) може бути реалізований шляхом обчислення "ковзаючого середнього" або у вигляді цифрового рециркулятора, виконаного на ПЛІС у відповідності зі схемою на RTL-рівні, що представлена на фіг. 9, де: MULT ALFA: DD1 - блок множення на ваговий коефіцієнта; ADDRESS: DD2 - блок формування адрес запису/читання; CUR PLUS LAST: DD3 - блок підсумовування поточного і попереднього значень оцінок першої вирішальної величини; LPM RAM DP: DD4 - блок зберігання результатів обчислень поточних значень другої вирішальної величини 35 40 45 50 55 60 Zq2 на N інтервалах області j невизначеності за часом. Розрядність подання необхідних адрес запису/читання R визначається кількістю позицій області невизначеності. Блок прийняття рішення забезпечує визначення номера позиції області невизначеності за часом, де на повному циклі сканування спостерігається максимальне значення другої вирішальної величини, і формування ознаки "Є сигнал" при виявленні повторення номера позиції з максимальним значенням другої вирішальної величини на декількох повних циклах сканування по одному з обраних критеріїв. Варіант побудови блока прийняття рішення може бути реалізований на ПЛІС у відповідності зі схемою на RTL-рівні, що представлена на фіг. 10, де: MAXIMUM: DD1 - блок виявлення наявності повторень номера позиції області невизначеності пошуку сигналу з максимальним значенням другої вирішальної величини; М: DD2 - блок, що реалізує виявлення повторення номера позиції області невизначеності пошуку сигналу з максимальним значенням другої вирішальної величини за критерієм "m - кратне повторення поспіль"; KN: DD3 - блок, що реалізує виявлення повторення номера позиції області невизначеності пошуку сигналу з максимальним значенням другої вирішальної величини за критерієм "k з n"; SEL: DD4 - блок, що забезпечує передачу першого з присутніх на його входах ознак ЄС та відповідного йому номера позиції області невизначеності пошуку сигналу з максимальним значенням другої вирішальної величини на входи блока управління та синхронізації 5. Блок управління і синхронізації забезпечує завантаження квадратурних компонент комплексно сполученого спектру сигналу заданої форми в програмований узгоджений фільтр із зовнішнього пристрою, управління синтезатором частот - послідовну установку кодів завантаження синтезатора для заданих частотних позицій з області невизначеності за частотою Aƒ, зупинку пошуку при надходженні сигналу ЄС з виходу блока прийняття рішення і видачу номерів часової і частотної позицій області невизначеності, де виявлено сигнал, через інтерфейс вводу/виводу видається на зовнішні пристрої, а також забезпечує формування і видачу тактових частот та імпульсів скидання для всіх цифрових блоків пристрою. 4 UA 91862 U 5 10 15 20 25 30 Робота пристрою Пристрій пошуку широкосмугового сигналу в заданій області невизначеності, що реалізує заявлений спосіб пошуку складних сигналів довільної форми, працює таким чином. Відповідно до команд, що подаються із зовнішнього пристрою через стандартний інтерфейс вводу/виводу (наприклад, через SPI - інтерфейс або USB порт), блок управління і синхронізації 5 встановлює параметри пошуку сигналу в заданій області невизначеності і тактову частоту, що забезпечує синхронну роботу всіх елементів пристрою пошуку. Коди завантаження синтезатора частот, що послідовно видаються та відповідають множині позицій області невизначеності за частотою, надходять на керуючий вхід синтезатора частот. Блок управління і синхронізації 5 забезпечує також виконання завантаження з зовнішнього пристрою квадратурних компонент комплексно сполученого спектру сигналу заданої форми в програмований цифровий узгоджений фільтр. Сукупність вхідного сигналу і перешкод надходить на вхід квадратурного демодулятора 1, на виході якого отримують квадратурні (косинусну та синусну) компоненти вхідного сигналу, перенесеного в область низьких частот. Дані компоненти подають на відповідні аналогоцифрові перетворювачі 3.1 та 3.2, виходи яких є входами програмованого цифрового узгодженого фільтра 4, який може бути реалізований за схемою представленою в [11] на сторінці 50. Отримані з виходу ПЦУФ квадратурні компоненти сигналу згортки вхідної реалізації та сигналу заданої форми, подають на вхід блока 6 некогерентного накопичення квадратів модуля згортки на l послідовних інтервалах області невизначеності за часом (зоні багатопроменевості), який може бути реалізований на ПЛІС відповідно до схеми представленої на RTL-рівні на фіг. 8, де SUM SQUER: DD1 - блок обчислення квадрата згортки на поточному інтервалі області невизначеності за часом, a SUM I: DD2 - блок некогерентного накопичення квадратів модуля згортки на l послідовних інтервалах області невизначеності за часом. На виході блока 6 отримуємо значення першої вирішальної величини Zj1. Сформована послідовність оцінок першої вирішальної величини Z j1 з виходу блока 6 надходить на вхід блока некогерентного накопичення 7, який може бути реалізований на ПЛІС відповідно до схеми, представленої на RTL-рівні на фіг. 9, де: MULT ALFA: DD1 - блок множення на ваговий коефіцієнт; ADDRESS: DD2 - блок формування адрес запису/читання; CUR PLUS LAST: DD3 - блок підсумовування поточного і попереднього значень оцінок першої вирішальної величини; LPM RAM DP: DD4 - блок зберігання результатів обчислень поточних значень другої вирішальної величини 35 40 Поточні значення оцінок першої вирішальної величини Zj1 з виходу блока 6 подаються на вхід блока CUR PLUS LAST: DD3, де підсумовуються з величинами, отриманими в результаті множення на коефіцієнт α у блоці MULT ALFA: DD1 значень попередніх оцінок, що зберігаються в блоці LPM RAM DP: DD4. Результати обчислень другої вирішальної величини на поточному етапі пошуку записуються в блок LPM RAM DP: DD4. Адреси запису/читання для блока LPM RAM DP: DD4 формуються у блоці ADDRESS: DD2 шляхом рахунку тактових імпульсів CLK. Значення адрес змінюються від 1 до L×N/l, причому перші N/l адреси належать до першої позиції області невизначеності за частотою, а останні N/l адреси - на L-й (останній) позиції області невизначеності по частоті. При надходженні адрес читання ADR RD значення другої вирішальної величини 45 50 55 Zq2 на N інтервалах області невизначеності за часом. j Zq2 на поточному етапі пошуку і відповідна адреса (номер позиції j області невизначеності) видаються на вихід блока 7. Оцінка другої вирішальної величини та адреса читання з виходу блока 7 надходять на блок прийняття рішення 8, який забезпечує визначення номера позиції області невизначеності за часом, де на повному циклі сканування спостерігається максимальне значення другої вирішальної величини, і формування ознаки "Є сигнал" при виявленні повторення номера позиції з максимальним значенням другої вирішальної величини на декількох повних циклах сканування по одному з вибраних критеріїв. Блок прийняття рішення 8 включає: модуль виявлення наявності повторень номера позиції області невизначеності пошуку сигналу з максимальним значенням другої вирішальної величини 8.1, модуль, який реалізує виявлення повторення номера позиції області невизначеності пошуку сигналу з максимальним значенням другої вирішальної величини за критерієм "m - кратне повторення поспіль" 8.2; модуль, який реалізує виявлення повторення номера позиції області невизначеності пошуку сигналу з максимальним значенням другої вирішальної величини за критерієм "k з n" 8.3; модуль, що забезпечує передачу першого з присутніх на його входах ознак ЄС та відповідного йому номера позиції області невизначеності пошуку сигналу з максимальним значенням другої вирішальної величини на вихід 8.4. 5 UA 91862 U Оцінка другої вирішальної величини Zq2 з першого виходу блока 7 надходить на перший j вхід модуля 8.1, який одночасно є входом блока прийняття рішення 8. На другий вхід даного модуля з другого виходу блока 7 надходить інформація про номер поточної позиції області невизначеності за часом. У модулі 8.1 проводиться вибір номера позиції 5 10 спостерігається максимальне значення другої вирішальної величини 20 25 30 35 40 45 50 Zq2 на поточному циклі j сканування області невизначеності. Дані значення з виходу модуля 8.1 передаються в модулі 8.2 і 8.3. На ці ж модулі з другого (адресного) виходу блока 7 надходить інформація про номер поточної позиції області невизначеності за часом. Надходження номера N-ої позиції свідчить про закінчення поточного циклу сканування і забезпечує реалізацію підрахунку кількості повторень номера позиції, де спостерігається максимальне значення другої вирішальної величини 15 A qmax (адреси), на якій j Zq2 . j У модулі 8.2 реалізується виявлення повторення номера позиції області невизначеності пошуку сигналу з максимальним значенням другої вирішальної величини за критерієм "m кратне повторення поспіль". При виявленні повторення, номер позиції At1 і сформована в модулі ознака "Є сигнал 1" (ЄС 1) передаються в модуль 8.4. У модулі 8.3 реалізується виявлення повторення номера позиції області невизначеності пошуку сигналу з максимальним значенням другої вирішальної величини за критерієм "k з n". При виявленні k повторень на n послідовних циклах сканування, номер позиції Аt2 і сформована в модулі ознака "Є сигнал 2" (ЄС 2) передаються вмодуль 8.4. Модуль 8.4 забезпечує передачу першого з присутніх на його входах ознак ЄС 1 або ЄС 2 і відповідного йому номера позиції At1(2) області невизначеності за часом сигналу з максимальним значенням другої вирішальної величини на входи блока управління та синхронізації 5. Варіант побудови блока прийняття рішення може бути реалізований на ПЛІС відповідно до схеми представленої на RTL-рівні на фіг. 10. За ознакою ЄС припиняється пошук сигналу в області невизначеності, фіксуються номери часової Аt і частотної Aƒ позицій області невизначеності, де виявлено сигнал, і результат через інтерфейс вводу/виводу видається з блока управління та синхронізації 8 на зовнішні пристрої для подальшого використання. Результати дослідження ефективності виявлення складного сигналу при використанні двокрітеріального методу виявлення представлені в статті H.V. Kharchenko, I.O. Tkalich, Y.I. Vdovychenko. Two-Criterial DSSS Synchronization Method Efficiency Research. Proceedings of 6-th IEEE East-West Design and Test Symposium (EWDTS'09). - Kharkov-Moscow: KNURE, 2009. - p. 165-174 - [12]. Таким чином, даний пристрій дозволяє реалізувати заявлений спосіб послідовного пошуку та виявляти складні сигнали довільної форми (наприклад, фазомодульовані сигнали або записані реалізації шуму з хорошими взаємокореляційними властивостями) в заданій області невизначеності. Порівняльний аналіз з іншими технічними рішеннями, відомими в даній галузі техніки, не дозволив виявити ознаки, заявлені в відмінній частині формули винаходу. Отже, можна припустити, що група винаходів що заявляється - спосіб пошуку широкосмугового сигналу і пристрій для його реалізації - відповідають критеріям патентоспроможності. Перелік фігур Корисна модель пояснюється графічними матеріалами. На фіг. 1 представлена структура повного циклу сканування області невизначеності по частоті і часу. На фіг. 2 представлена структура повного циклу сканування області невизначеності по частоті і часу після перетворення l послідовних інтервалів часу в один. На фіг. 3 представлена часова діаграма, яка ілюструє процес формування оцінок першої вирішальної величини Zj1 на інтервалі багатопроменевості при l=16, на одній частотній позиції, де фактично спостерігається сигнал. На фіг. 4 представлена часова діаграма формування оцінок другої вирішальної величини Zq2 , отриманих шляхом некогерентного вагового підсумовування значень першої вирішальної j величини Zj1 на поточному і попередніх етапах пошуку. На фіг. 5 представлена часова діаграма, яка ілюструє ситуацію, при якій другий номер 55 позиції з максимальним значенням оцінювання 6 другої вирішальної величини Zq2 , j UA 91862 U спостерігається 3 рази поспіль на 3-х повних циклах сканування часової області невизначеності, після чого формують ознаку "Є сигнал" за критерієм "3 поспіль". На фіг. 6 представлена часова діаграма, яка ілюструє ситуацію, при якій другий номер позиції 5 10 15 з максимальним значенням оцінювання другої вирішальної 30 35 40 45 A qmax номер позиції, на якій спостерігається j максимальне значення другої вирішальної величини на поточному циклі сканування області невизначеності; 8.2 - модуль що входить до складу блока прийняття рішення, який реалізує перевірку наявності повторення за критерієм "m - кратне повторення поспіль", де ЄС 1 - сформована в модулі ознака наявності повторення, а Аt1 номер позиції, яка повторюється; 8.3 - модуль що входить до складу блока прийняття рішення, який реалізує перевірку наявності повторення за критерієм "k з n", де ЄС 2 - сформована в модулі ознака наявності повторення, a At2 номер позиції, яка повторюється; 8.4 - модуль що входить до складу блока прийняття рішення, що забезпечує передачу першого з присутніх на його входах ознак ЄС та відповідного йому номера позиції A t області невизначеності пошуку сигналу з максимальним значенням другої вирішальної величини на входи блока управління і синхронізації. На фіг. 8 представлений варіант побудови на ПЛІС блока некогерентного накопичення квадратів модуля оцінок кореляції Yi на інтервалі багатопроменевості (блок обчислення першої вирішальної величини Zj1), реалізований у вигляді схеми на RTL-рівні, де SUM SQUER: DD1 блок обчислення оцінок кореляції Yі, a SUM I: DD2 - блок некогерентного накопичення оцінок Yi на l послідовних інтервалах часу (на інтервалі багатопроменевості). На фіг. 9 представлений варіант побудови блока некогерентного накопичення, реалізованого у вигляді схеми на RTL-рівні цифрового рециркулятора, де: MULT ALFA: DD1 блок множення на ваговий коефіцієнт α; ADDRESS: DD2 - блок формування адрес запису/читання; CUR PLUS LAST: DD3 - блок підсумовування поточного і попереднього значень оцінок першої вирішальної величини; LPM RAM DP: DD4 - блок зберігання результатів обчислень поточних значень другої вирішальної величини 50 55 Zq2 - друга вирішальна j величина; 8 - блок прийняття рішення; 8.1 - модуль що входить до складу блока прийняття рішення, та забезпечує виявлення наявності повторень номера позиції області невизначеності пошуку сигналу з максимальним значенням другої вирішальної величини, де 25 Zq2 , j спостерігається 3 рази на 4-х повних циклах сканування часової області невизначеності, після чого формують ознаку "Є сигнал" за критерієм "3 з n". На фіг. 7 представлена структурна схема пристрою пошуку широкосмугового сигналу, що реалізує заявлений спосіб пошуку, де: 1 - квадратурний демодулятор; 2 - синтезатор частот; 3.1 та 3.2 - аналого-цифрові перетворювачі квадратурних компонент що надходять з виходу демодулятора; 4 - програмований цифровий узгоджений фільтр, де Yi Re та Yi Im - квадратурні компоненти оцінок кореляції на поточному етапі пошуку; 5 - блок управління і синхронізації; 6 - блок некогерентного накопичення квадратів модуля на l послідовних інтервалах області невизначеності за часом (інтервалі багатопроменевості), де Zj1 - значення першої вирішальної величини; 7 - блок некогерентного накопичення (вагового підсумовування), де 20 величини Zq2 на N інтервалах області j невизначеності за часом. На фіг. 10 представлений варіант побудови блока прийняття рішення у вигляді схеми на RTL-рівні, де: MAXIMUM: DD1 - блок виявлення наявності реалізує виявлення повторення номера позиції області невизначеності пошуку сигналу з максимальним значенням другої вирішальної величини за критерієм "m - кратне повторення поспіль"; KN: DD3 - блок, що реалізує виявлення повторення номера позиції області невизначеності пошуку сигналу з максимальним значенням другої вирішальної величини за критерієм "k з n"; SEL: DD4 - блок що забезпечує передачу першого з присутніх на його входах ознак ЄС та відповідного йому номера позиції області невизначеності пошуку сигналу з максимальним значенням другої вирішальної величини на входи блока управління та синхронізації. 7 UA 91862 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 Спосіб пошуку широкосмугового сигналу (ШСС), який полягає в тому, що здійснюють послідовний пошук по області невизначеності, кожна позиція якої відповідає деякому набору невідомих параметрів сигналу, причому пошук ШСС на кожній позиції області невизначеності здійснюють послідовно в q етапів, при цьому обчислюють кореляцію між вхідним і опорним сигналами, утворюючи величини оцінок кореляції Y на і послідовних інтервалах когерентності ШСС, відповідних поточному - і-му етапу пошуку, формують вирішальну величину Z i поточного 10 15 20 і-го етапу пошуку як суму оцінок кореляції Y , отриманих на поточному і всіх попередніх етапах пошуку, сформовану вирішальну величину Z i аналізують шляхом порівняння з вибраним порогом і приймають рішення про наявність ШСС зі значеннями параметрів, відповідними поточній позиції області невизначеності, пошук продовжують до досягнення останньої позиції області невизначеності, якщо прийнято рішення про те, що на повному циклі сканування сигнал не виявлено, то пошук поновлюється з першої позиції, який відрізняється тим, що після отримання оцінок кореляції між вхідним і опорним сигналами формують першу вирішальну величину Z j1 , що відповідає енергії сигналу на інтервалі багатопроменевості, шляхом некогерентного накопичення оцінок Y на l послідовних інтервалах часу в області невизначеності, область невизначеності за часом перетворюють, групуючи l послідовних інтервалів часу, на яких отримана оцінка Z j1 в один інтервал, і, привласнюючи йому відповідний номер, формують другу вирішальну величину Zq2 поточного етапу пошуку шляхом j некогерентного накопичення значень першої вирішальної величини 25 Z j1 , отриманих на поточному q-му циклі і на попередніх повних циклах сканування області невизначеності, виявляють повторюваність номеру інтервалу області невизначеності пошуку з максимальним значенням другої вирішальної величини на декількох повних циклах сканування області невизначеності, якщо номер позиції перетвореної області невизначеності повторюється k раз на n послідовних повних циклах сканування або номер позиції повторюється m раз поспіль, то приймають рішення про виявлення сигналу, який спостерігається, зупиняють пошук і фіксують номер позиції області невизначеності. 8 UA 91862 U 9 UA 91862 U 10 UA 91862 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 11
ДивитисяДодаткова інформація
МПК / Мітки
Мітки: пошуку, широкосмугового, сигналу, спосіб
Код посилання
<a href="https://ua.patents.su/13-91862-sposib-poshuku-shirokosmugovogo-signalu.html" target="_blank" rel="follow" title="База патентів України">Спосіб пошуку широкосмугового сигналу</a>
Генератор широкосмугового нвч-сигналу на віртуальному катоді
Номер патенту: 35965
Опубліковано: 10.10.2008
Автори: Мельничук Олена Михайлівна, КРАВЧЕНКО ЮРІЙ СТЕПАНОВИЧ
МПК: H01J 25/00
Мітки: віртуальному, генератор, катоді, широкосмугового, нвч-сигналу
Формула / Реферат:
Генератор широкосмугового НВЧ-сигналу на віртуальному катоді, що містить катод, не менше одного сіткового анода, розміщеного перпендикулярно напрямку руху пучка електронів з можливістю формування віртуального катода, який відрізняється тим, що в нього введено хвилевід циліндричної форми, з'єднаний з сітковим анодом та розташований співвісно з катодом, сітковим анодом і віртуальним катодом, ізолятор, розміщений навколо катода, діелектричне...
Система цифрового кодування-декодування, кодер, декодер, носій запису та спосіб передавання широкосмугового цифрового звукового сигналу
Номер патенту: 73532
Опубліковано: 15.08.2005
Автори: Штолль Герхард, Деері Ів Франсуа, Локофф Герардус Корнеліс Петрус, Тайле Гюнтер
МПК: H04B 1/66, H04J 3/00, G11B 20/10
Мітки: кодування-декодування, широкосмугового, система, кодер, спосіб, носій, сигналу, цифрового, декодер, звукового, запису, передавання
Формула / Реферат:
1. Система цифрового кодування-декодування, яка включає в себе кодер і декодер, для кодування-декодування широкосмугового цифрового звукового сигналу, що включає в себе щонайменше перший і другий компоненти сигналу, причому згаданий кодер має засіб із фільтрами аналізу для фільтрування згаданих компонентів сигналу таким чином, щоб одержувати певну кількість (n) субсигналів для згаданих щонайменше двох компонентів сигналу, і засіб виведення...
Спосіб та пристрій пошуку пілот-сигналу у системі безпровідного зв’язку
Номер патенту: 71022
Опубліковано: 15.11.2004
Автор: Соліман Самір С.
МПК: H04Q 7/38, H04B 1/707
Мітки: системі, пілот-сигналу, пошуку, пристрій, зв'язку, спосіб, безпровідного
Формула / Реферат:
1. Спосіб пошуку пілот-сигналу у системі безпровідного зв'язку, який включає: -визначення місцеположення мобільної станції у зазначеній системі безпровідного зв'язку, -визначення сукупності розмірів вікон пошуку, що відповідає сукупності пілот-сигналів, базуючись на зазначеному місцеположенні мобільної станції відносно відповідного місцеположення передавального джерела зазначеної сукупності пілот-сигналів.2. Спосіб за п....
Пристрій для пошуку екстремумів сигналу
Номер патенту: 14413
Опубліковано: 25.04.1997
Автор: Багацький Валентин Олексійович
МПК: G05B 13/02
Мітки: екстремумів, сигналу, пристрій, пошуку
Формула / Реферат:
Устройство для поиска экстремумов сигнала, содержащее блок сравнения, регистр максимума, регистр минимума, блок памяти, генератор импульсов и двухразрядный сдвиговый регистр, причем к второму входу блока сравнения подсоединен уравновешивающий выход блока памяти, выходы блока сравнения соединены с первыми входами блока памяти и с входами сдвигового регистра, выход генератора импульсов соединен с вторым входом блока памяти, отличающееся...
Синхронізація фемтостільників і методологія пошуку пілот-сигналу
Номер патенту: 99154
Опубліковано: 25.07.2012
Автор: Годжик Александар М.
МПК: H04W 16/00, H04B 7/26, H04W 36/08
Мітки: методологія, синхронізація, пошуку, пілот-сигналу, фемtoстільників
Формула / Реферат:
1. Спосіб синхронізації фемтостільника з макростільником, який включає етапи, на яких:приймають сигнал хронування передачі фемтостільника від макростільника за допомогою приймача прямої лінії зв'язку в фемтостільнику; іздійснюють синхронізацію сигналу хронування передачі фемтостільника з сигналом хронування передачі макростільника на основі сигналу приймача прямої лінії зв'язку.2. Спосіб за п. 1, в якому приймач прямої...
Попередній патент: Спосіб біологічного доочищення питної води від нітратів
Наступний патент: Пристрій для забезпечення оптимального натиску струмоприймачем на контактну мережу
Випадковий патент: Спосіб насичення-відмивання нирки