Матричний декодер

Формула / Реферат
1. Спосіб матричного декодування аудіосигналів, у якому приймають пару стереосигналів Lt, Rt, відносні амплітуди і полярності яких визначають відтворений напрям поширення декодованих сигналів, у якому
надсилають сигнали Lt і Rt до виходів, які відповідають поширенню сигналів вперед, у відповідь на визначення суми сигналів Lt і Rt, яка більша за величину різниці між сигналами Lt і Rt, і надсилають сигнали Lt і Rt до виходів, які відповідають поширенню сигналів назад, у відповідь на визначення суми сигналів Lt і Rt, яка менша за величину різниці між сигналами Lt і Rt, і
модифікують сигнали Lt і Rt для зміни напряму поширення відтворених сигналів, при цьому згадана модифікація включає зміну напряму поширення сигналів виходів, які відповідають поширенню сигналів вперед і назад, вліво або вправо, причому напрям поширення сигналів виходів, які відповідають поширенню сигналів назад, зміщений більшою мірою, аніж напрям поширення сигналів виходів, які відповідають поширенню сигналів вперед, при цьому згадане зміщення включає модифікацію пари стереосигналів Lt, Rt шляхом формування різницевого сигналу з сигналів Lt і Rt, шляхом масштабування згаданого різницевого сигналу за допомогою коефіцієнта підсилення і шляхом підсумовування згаданого масштабованого різницевого сигналу з сигналами Lt і Rt для одержання модифікованих сигналів Lt і Rt так, що відносні амплітуди і полярності модифікованої пари сигналів Lt і Rt визначають відтворений напрям поширення декодованих сигналів.
2. Спосіб за п. 1, який відрізняється тим, що модифікація сигналів Lt і Rt для зміщення напряму поширення відтворених сигналів зміщує сигнали, надіслані до виходів, які відповідають поширенню сигналів назад, для зміщення сигналів від заднього центрального напряму.
3. Спосіб за п. 2, який відрізняється тим, що сигнали, надіслані до виходів, які відповідають поширенню сигналів назад, зміщують від заднього центрального напряму в напрямі, у якому вони мають найбільшу амплітуду.
4. Спосіб за п. 2 або п. 3, який відрізняється тим, що ступінь зміщення найбільший для сигналів у задньому центральному положенні, зміщення поступово послаблюється для сигналів в напрямах, які послідовно віддаляються від заднього центрального напряму.
5. Спосіб за п. 1, який відрізняється тим, що модифікація сигналів Lt і Rt для зміщення напряму поширення відтворених сигналів зміщує сигнали, надіслані до виходів, які відповідають поширенню сигналів вперед, для зміщення малої кількості сигналів в передньому центральному напрямі.
6. Спосіб за п. 5, який відрізняється тим, що ступінь зміщення мінімальний для сигналів в передньому центральному положенні, зміщення поступово зростає для сигналів в напрямах, які послідовно віддаляються від переднього центрального напряму.
7. Спосіб за будь-яким із пп. 1-6, який відрізняється тим, що ступінь зміщення базується на визначенні різниці сигналів Lt і Rt.
8. Спосіб за будь-яким із пп. 1-7, який відрізняється тим, що ступінь зміщення змінюється тільки, коли сигнали Lt і Rt надсилаються до виходів, які відповідають поширенню сигналів назад.
Текст
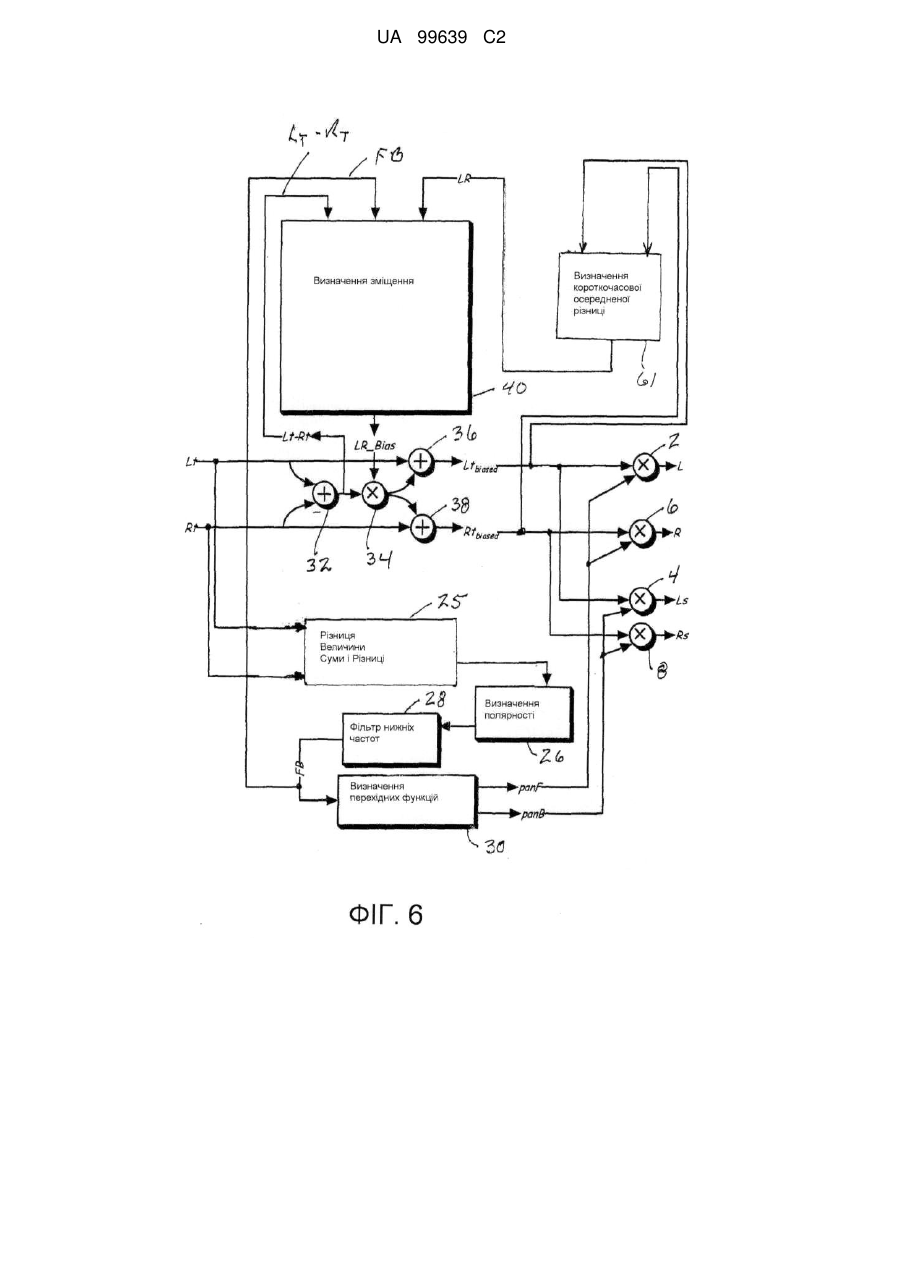
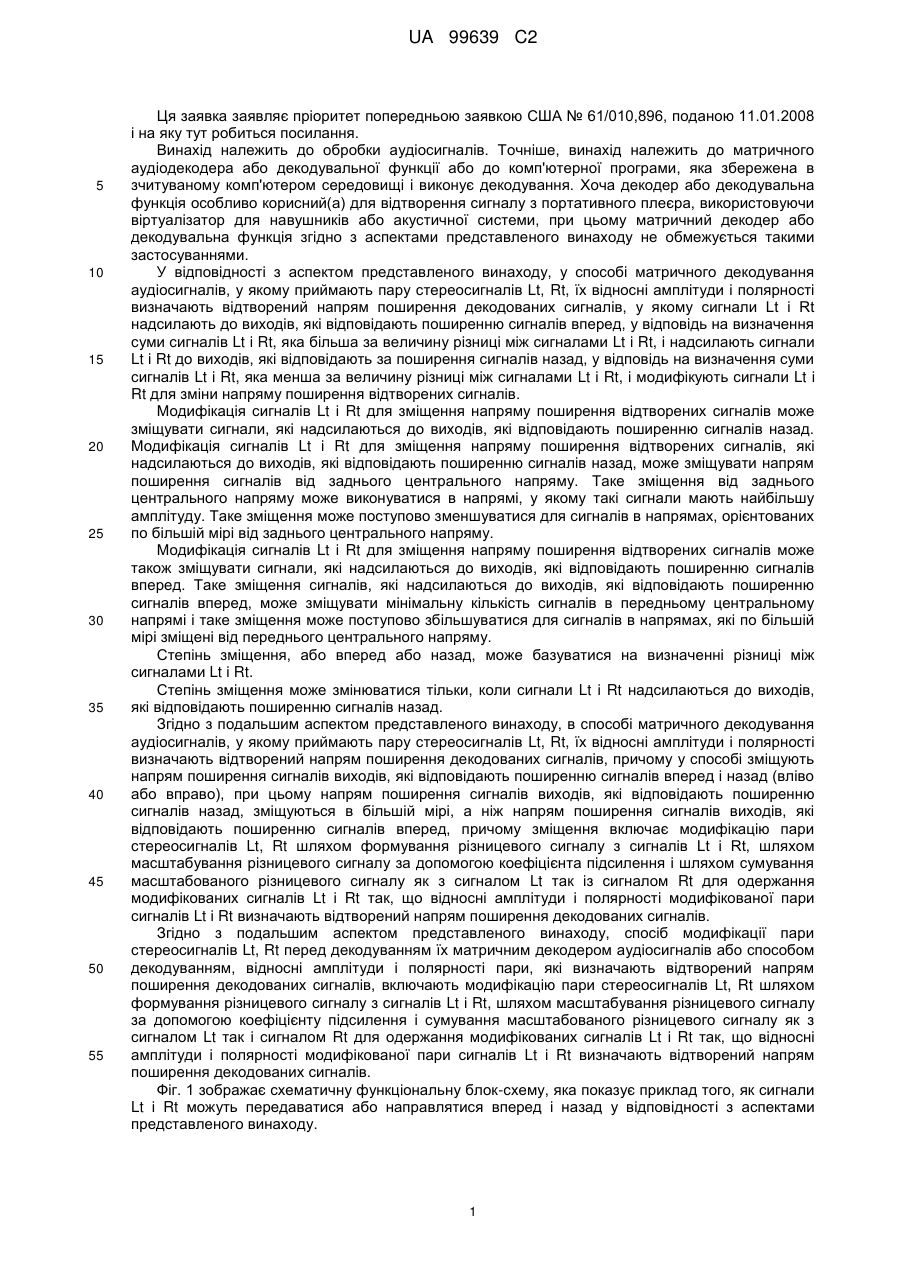
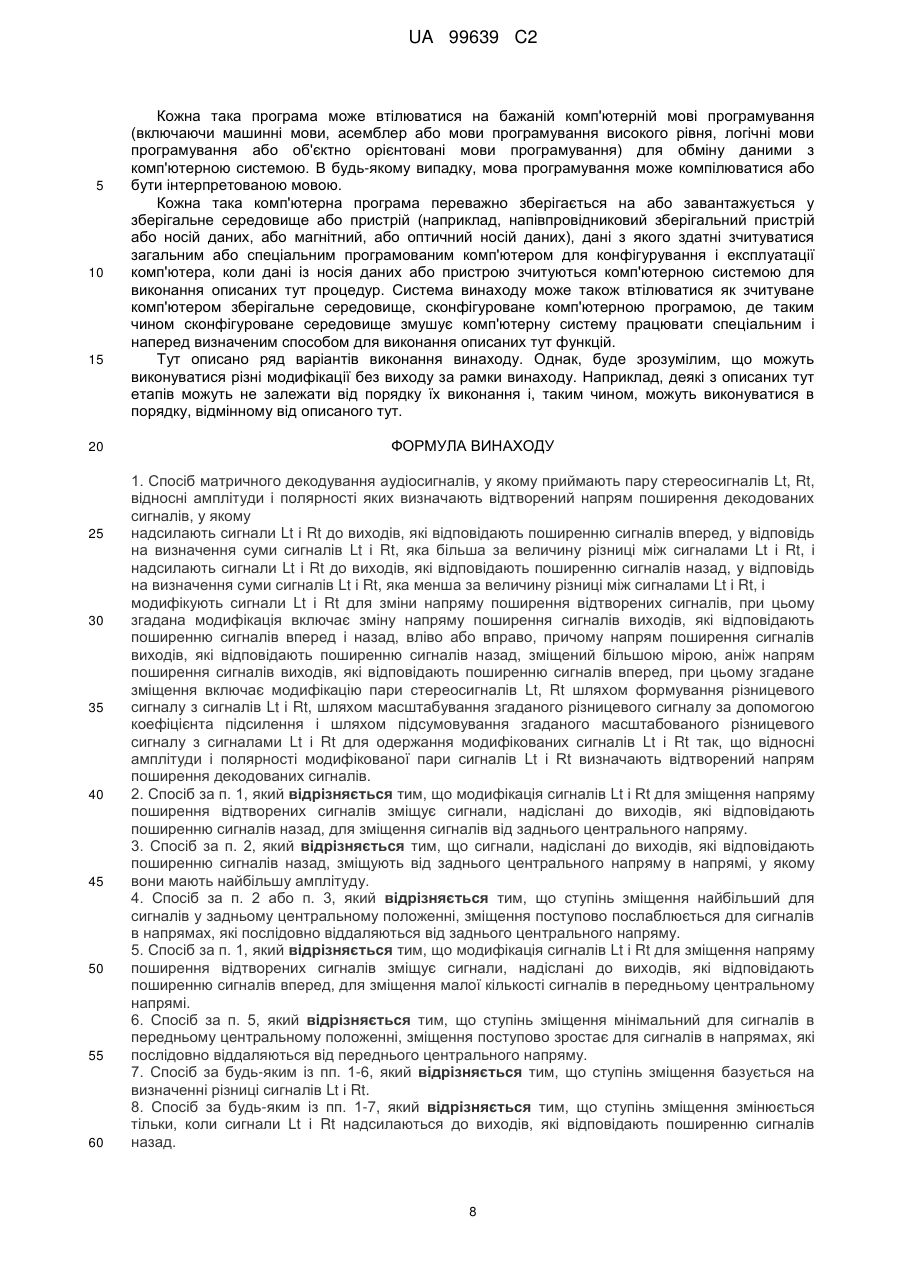
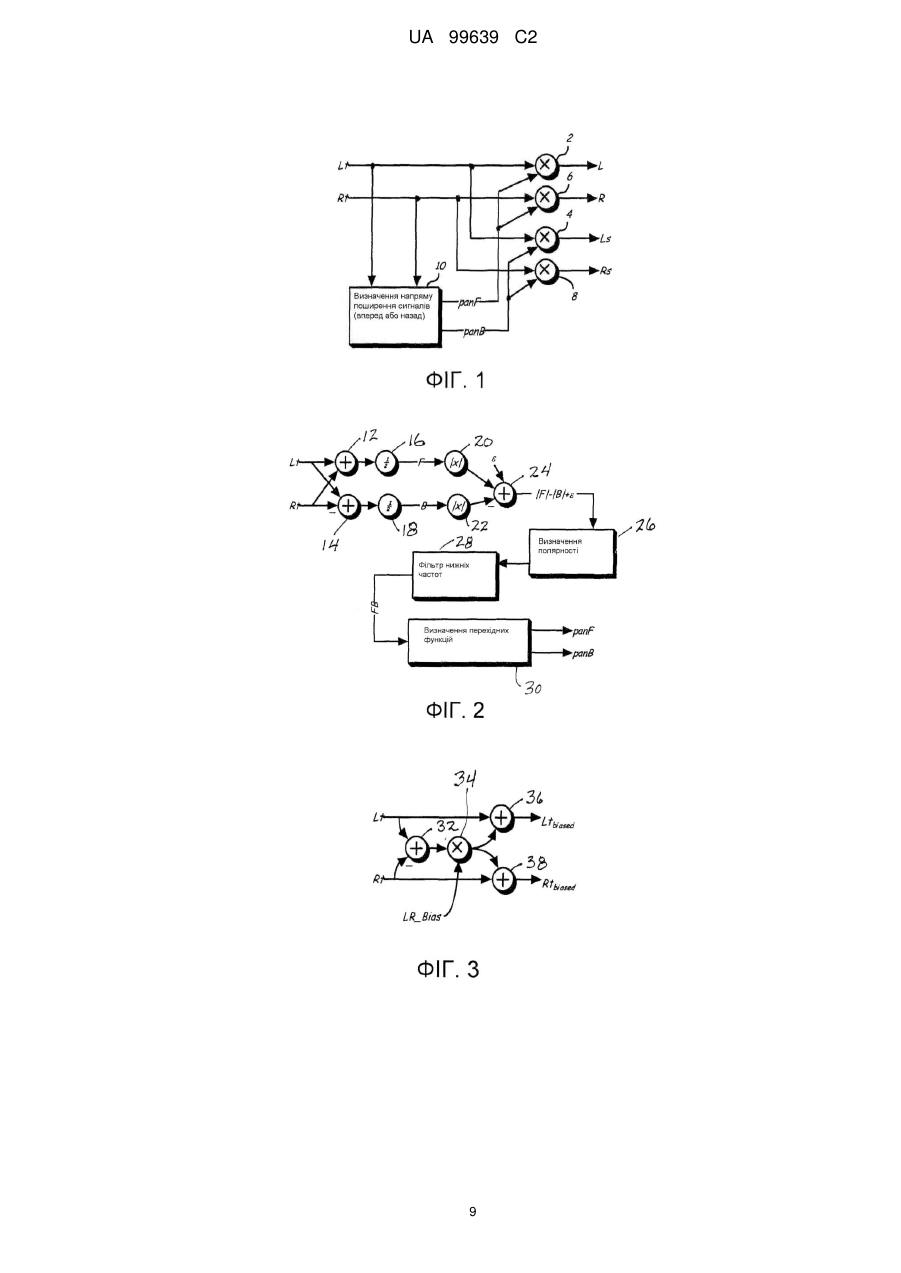
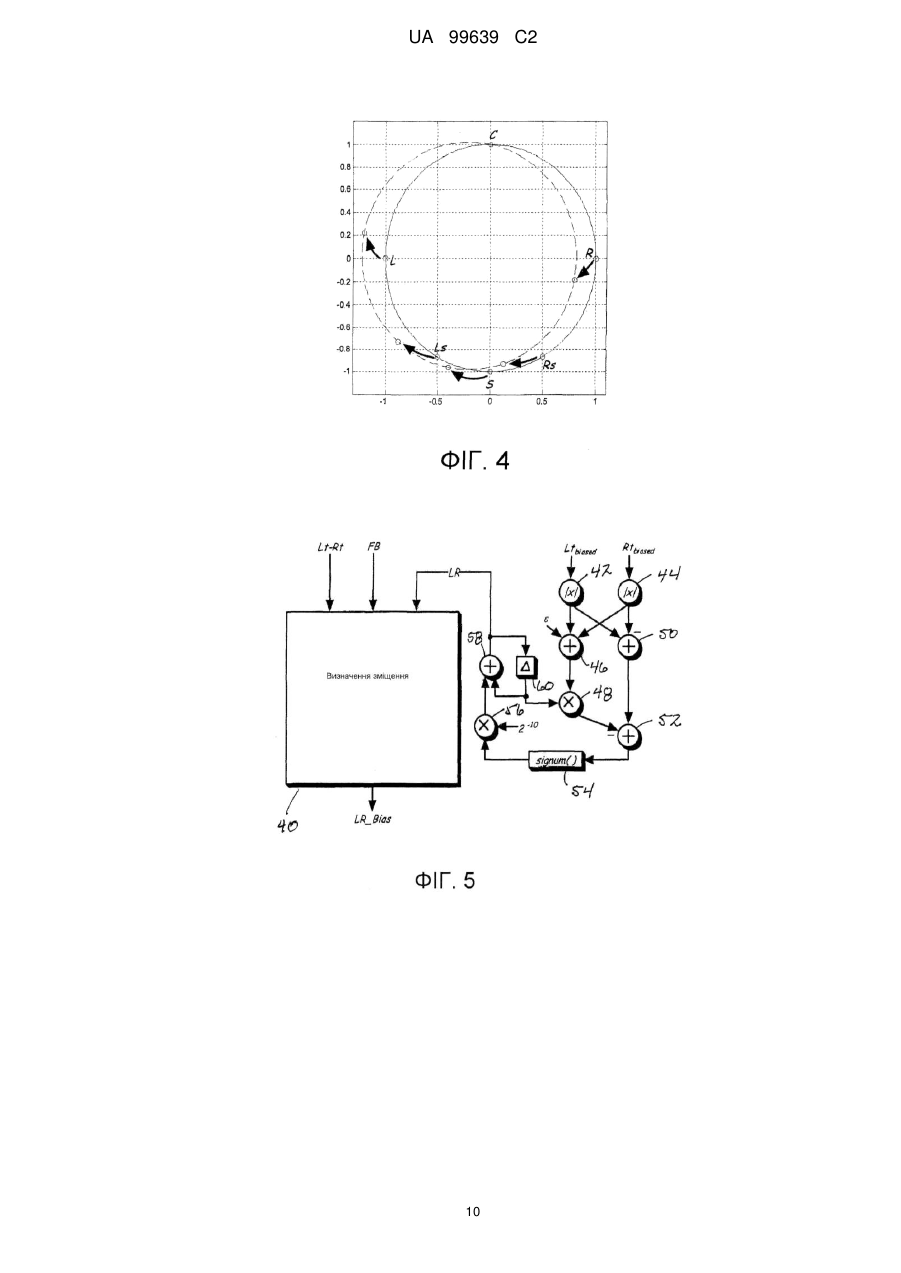
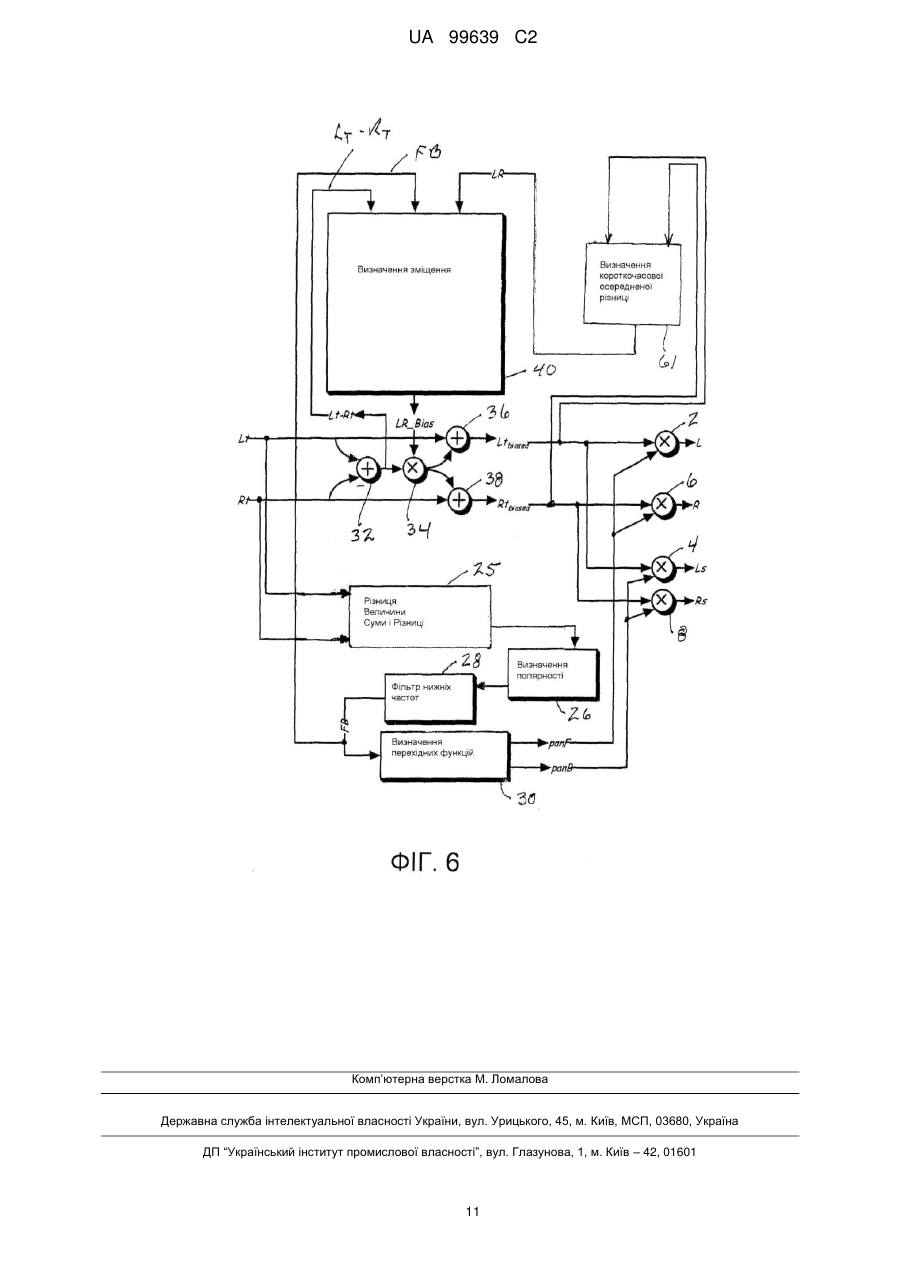
Реферат: Цей матричний декодер аудіосигналів з об'ємним звуком вимагає мінімальної цифрової обробки, корисної у мобільних застосуваннях, зокрема у відтворенні звуку від портативного плеєра, у якому використовуються навушники або віртуалізатор для динаміка. В одному варіанті виконання він надсилає сигнали Lt і Rt до виходів, які відповідають поширенню сигналів вперед, у відповідь на визначення суми сигналів Lt та Rt, яка більша за величину різниці сигналів Lt і Rt, і надсилає сигнали Lt та Rt до виходів, які відповідають поширенню сигналів назад, у відповідь на визначення суми сигналів Lt і Rt, яка менша за величину різниці сигналів Lt та Rt. Сигнали Li і Rt модифікуються для зміщення напряму поширення відтворених сигналів. UA 99639 C2 (12) UA 99639 C2 UA 99639 C2 5 10 15 20 25 30 35 40 45 50 55 Ця заявка заявляє пріоритет попередньою заявкою США № 61/010,896, поданою 11.01.2008 і на яку тут робиться посилання. Винахід належить до обробки аудіосигналів. Точніше, винахід належить до матричного аудіодекодера або декодувальної функції або до комп'ютерної програми, яка збережена в зчитуваному комп'ютером середовищі і виконує декодування. Хоча декодер або декодувальна функція особливо корисний(а) для відтворення сигналу з портативного плеєра, використовуючи віртуалізатор для навушників або акустичної системи, при цьому матричний декодер або декодувальна функція згідно з аспектами представленого винаходу не обмежується такими застосуваннями. У відповідності з аспектом представленого винаходу, у способі матричного декодування аудіосигналів, у якому приймають пару стереосигналів Lt, Rt, їх відносні амплітуди і полярності визначають відтворений напрям поширення декодованих сигналів, у якому сигнали Lt і Rt надсилають до виходів, які відповідають поширенню сигналів вперед, у відповідь на визначення суми сигналів Lt і Rt, яка більша за величину різниці між сигналами Lt і Rt, і надсилають сигнали Lt і Rt до виходів, які відповідають за поширення сигналів назад, у відповідь на визначення суми сигналів Lt і Rt, яка менша за величину різниці між сигналами Lt і Rt, і модифікують сигнали Lt і Rt для зміни напряму поширення відтворених сигналів. Модифікація сигналів Lt і Rt для зміщення напряму поширення відтворених сигналів може зміщувати сигнали, які надсилаються до виходів, які відповідають поширенню сигналів назад. Модифікація сигналів Lt і Rt для зміщення напряму поширення відтворених сигналів, які надсилаються до виходів, які відповідають поширенню сигналів назад, може зміщувати напрям поширення сигналів від заднього центрального напряму. Таке зміщення від заднього центрального напряму може виконуватися в напрямі, у якому такі сигнали мають найбільшу амплітуду. Таке зміщення може поступово зменшуватися для сигналів в напрямах, орієнтованих по більшій мірі від заднього центрального напряму. Модифікація сигналів Lt і Rt для зміщення напряму поширення відтворених сигналів може також зміщувати сигнали, які надсилаються до виходів, які відповідають поширенню сигналів вперед. Таке зміщення сигналів, які надсилаються до виходів, які відповідають поширенню сигналів вперед, може зміщувати мінімальну кількість сигналів в передньому центральному напрямі і таке зміщення може поступово збільшуватися для сигналів в напрямах, які по більшій мірі зміщені від переднього центрального напряму. Степінь зміщення, або вперед або назад, може базуватися на визначенні різниці між сигналами Lt і Rt. Степінь зміщення може змінюватися тільки, коли сигнали Lt і Rt надсилаються до виходів, які відповідають поширенню сигналів назад. Згідно з подальшим аспектом представленого винаходу, в способі матричного декодування аудіосигналів, у якому приймають пару стереосигналів Lt, Rt, їх відносні амплітуди і полярності визначають відтворений напрям поширення декодованих сигналів, причому у способі зміщують напрям поширення сигналів виходів, які відповідають поширенню сигналів вперед і назад (вліво або вправо), при цьому напрям поширення сигналів виходів, які відповідають поширенню сигналів назад, зміщуються в більшій мірі, а ніж напрям поширення сигналів виходів, які відповідають поширенню сигналів вперед, причому зміщення включає модифікацію пари стереосигналів Lt, Rt шляхом формування різницевого сигналу з сигналів Lt і Rt, шляхом масштабування різницевого сигналу за допомогою коефіцієнта підсилення і шляхом сумування масштабованого різницевого сигналу як з сигналом Lt так із сигналом Rt для одержання модифікованих сигналів Lt і Rt так, що відносні амплітуди і полярності модифікованої пари сигналів Lt і Rt визначають відтворений напрям поширення декодованих сигналів. Згідно з подальшим аспектом представленого винаходу, спосіб модифікації пари стереосигналів Lt, Rt перед декодуванням їх матричним декодером аудіосигналів або способом декодуванням, відносні амплітуди і полярності пари, які визначають відтворений напрям поширення декодованих сигналів, включають модифікацію пари стереосигналів Lt, Rt шляхом формування різницевого сигналу з сигналів Lt і Rt, шляхом масштабування різницевого сигналу за допомогою коефіцієнту підсилення і сумування масштабованого різницевого сигналу як з сигналом Lt так і сигналом Rt для одержання модифікованих сигналів Lt і Rt так, що відносні амплітуди і полярності модифікованої пари сигналів Lt і Rt визначають відтворений напрям поширення декодованих сигналів. Фіг. 1 зображає схематичну функціональну блок-схему, яка показує приклад того, як сигнали Lt і Rt можуть передаватися або направлятися вперед і назад у відповідності з аспектами представленого винаходу. 1 UA 99639 C2 5 10 15 20 25 30 35 40 45 50 Фіг. 2 зображає схематичну функціональну блок-схему, яка показує приклад деталей процедури "Визначення Напряму Надсилання Сигналів (вперед або назад)" з Фіг. 1. Фіг. 3 зображає схематичну функціональну блок-схему, яка показує приклад того, як сигнали Lt і Rt можуть модифікуватися у відповідності з аспектами представленого винаходу. Фіг. 4 зображає концептуальну схему, корисну в розумінні ефекту модифікації сигналів Lt і Rt y відповідності з аспектами представленого винаходу. Фіг. 5 зображає схематичну функціональну блок-схему, яка показує приклад того, як може одержуватися контрольний сигнал LR_bias з Фіг. 3. Фіг. 6 зображає схематичну функціональну блок-схему, яка показує усе розташування елементів з Фіг. 1, 2, 3 і 5. Перехід вперед-назад Матричний декодер згідно з аспектами представленого винаходу обробляє сигнали Lt і Rt, надіслані до його входів як пара стереосигналів, і він надсилає ці сигнали вперед (вліво (L) і вправо (R)) або назад (лівий об'єм (Ls) і правий об'єм (Rs)). Сигнали Lt і Rt надсилаються до виходів, які відповідають надсиланню сигналів вперед, у відповідь на визначення суми сигналів Lt і Rt, яка більша за величину різниці сигналів Lt і Rt. Сигнали Lt і Rt надсилаються до виходів, які відповідають надсиланням сигналів назад, у відповідь на визначення суми сигналів Lt і Rt, яка менша за величину різниці сигналів Lt і Rt. Може досягатися поширення сигналів вперед і назад, наприклад, як це показано на Фіг. 1. В цій блок-схемі, сигнали panF і раnВ є підсиленими сигналами з слабкими змінами (аудіосигнали не всієї смуги частот), які можуть змінюватися, наприклад, від 0 до 1. Сигнали panF і раnВ функціонують разом (вони доповнюють один одного) для здійснення гладкого переходу між передніми сигналами L і R і задніми сигналами Ls і Rs. На Фіг. 1, вхідний сигнал Lt подається до виходу L через блок множення або функцію 2 множення і до виходу Ls через блок множення або функцію 4 множення. Вхідний сигнал Rt надсилається до виходу R через блок множення або функцію 6 множення і до виходу Rs через блок множення або функцію 8 множення. Підсилення кожного з блоків 2 і 6 множення контролюється підсиленим сигналом panF; підсилення кожного з блоків підсилення 4 і 8 контролюється підсиленим сигналом раnВ. Вхідні сигнали Lt і Rt також надсилаються до схеми або функції ("Визначення Напряму Поширення Сигналів (вперед або назад)") 10, яка генерує сигнали panF і раnВ. Деталі процедури визначення напряму поширення сигналів (вперед або назад) показані на Фіг. 2. При умові часового згладжування, як це описано нижче, коли процедура "Визначення Напряму Поширення Сигналів (вперед або назад)" виявляє серед вхідних сигналів Lt і Rt протягом достатнього періоду часу антифазний аудіосигнал, а не синфазний аудіосигнал, то вона встановлює сигнали spanB=1,0 і panF=0,0, таким чином спрямовуючи, надсилаючи або "направляючи" вхідні сигнали Lt і Rt тільки до вихідних каналів Ls і Rs з ефектом об'ємного звуку (постійне поширення назад). Подібним чином, коли протягом достатнього періоду часу вхідний сигнал є синфазним аудіосигналом, а не антифазним аудіосигналом, то процедура "визначення напряму поширення сигналів (вперед або назад)" 10 встановлює раnВ=0,0 і panF=1,0, таким чином посилаючи вхідні сигнали Lt і Rt тільки до передніх вихідних каналів L і R (постійне поширення сигналів вперед). Обладнання на Фіг. 2 миттєво генерує різницю між величинами суми і різниці вхідних сигналів Lt і Rt (швидкозмінний сигнал, який має як додатну так і від'ємну складову) і порівнює її з малою пороговою величиною (епсілон). Це здійснюється блоком додавання або функцією додавання 12, яка приймає сигнали Lt і Rt для одержання сигналу Lt+Rt на своєму виході, блоком додавання або функцію додавання 14, яка віднімає сигнал Rt від сигналу Lt для одержання сигналу Lt-Rt на своєму виході, перетворювачами масштабу або функціями 16 і 18 перетворення масштабу, які масштабують амплітуди сигналів Lt+Rt і Lt-Rt для одержання "переднього" і "заднього" сигналу F і В, Lt Rt (1) F 2 Lt Rt (2) F 2 які мають абсолютні величини, показані в блоках для одержання абсолютних величин або функціях 20 і 22, і блок додавання або функцію додавання 24, яка віднімає абсолютну величину В від абсолютної величини F і додає малу величину епсілон. Елементи 12, 14, 16, 18, 20, 22 і 24 можуть розглядатися сумісно як блок або функція "різниці величин суми і різниці" "елемент 25", як це показано в схемі з Фіг. 6. 2 UA 99639 C2 Полярність результату 5 10 15 20 25 30 35 40 45 50 F B визначається блоком або функцією 26 "Виявлення Полярності". Якщо вона є негативною, то відповідь є однією величиною, наприклад - 1, якщо вона є додатною іншою величиною, то відповідь є 0. Зрозуміло, що можуть використовуватися величини, відмінні від - 1 і 0. Результатом є коливний сигнал з двома величинами, які змінюються між двома рівнями (у цьому прикладі між - 1 та 0). Застосовують фільтр нижніх частот або функцію фільтрування ("Фільтр Нижніх Частот") ("LPF") 28, що надає менш змінний коливний сигнал FB, який може мати будь-яке значення в інтервалі між або з включенням величин двох рівнів в залежності від часу, який витрачає квадратна хвиля на кожному рівні. У відповідь на реальні аудіосигнали згладжений коливний сигнал, одержаний за допомогою фільтра нижніх частот (LPF 28), має тенденцію залишатися поблизу одного або іншого з екстремумів. Насправді, фільтр нижніх частот (LPF 28) видає короткочасову середню величину його вхідного сигналу, який має часову константу, наприклад в інтервалі від 5 до 100 мілісекунд. Хоча було виявлено, що часова константа величиною 40 мілісекунд є прийнятною, ця величина не є важливою. Фільтр нижніх частот (LPF 28) може реалізовуватися як однополюсний фільтр. Знову посилаючись на приклад з Фіг. 2, після визначення проміжного контрольного сигналу FB, два комплементарні перехідні коефіцієнти panF і раnВ, можуть потім одержуватися будьякою кількістю способів за допомогою пристрою або функції 30 "Визначення Перехідних Функцій". В принципі, може застосовуватися будь-яка з різних зазвичай використовуваних перехідних функцій, таких як лінійна пилкоподібна функція, логарифмічна функція, функція Хенінга, функція Хемінга та синусна функція. Буде зрозумілим, що реальні формули будуть змінюватися в залежності від вихідних величин, вибраних для функції виявлення полярності 26. Якщо бажано мати сталу потужність переходу, то можуть використовуватися наступні формули: (3) panF=sin(/2*(1+FB)) (4) раnВ=cos(/2*(1+FB)) Альтернативно, якщо перевага надається сталому звуковому тиску або він принаймні є прийнятним, то можна використовувати наступні формули: panF=1+FB (5) раnВ=-FB (6) Хоча вищенаведені рівняння 3 і 4 забезпечують сталу потужність (сума квадратів коефіцієнтів panF і раnВ дорівнює одиниці), сталу потужність можна апроксимувати використанням наступних формул: 2 panF=1-FB (7) 2 panB=1-(FB+1) (8) Величини кожного з коефіцієнтів panF і раnВ у прикладі рівнянь 7 і 8 можуть знаходитися в інтервалі від 0 до 1 і є комплементарними один до іншого, і кожен змінюється по параболічному закону. Результатом є два коефіцієнти або контрольні сигнали, величини яких знаходяться в інтервалах від 0 до 1, сума квадратів яких приблизно дорівнює 1. Якщо коефіцієнт panF був постійно більшим за коефіцієнт раnВ в будь-якому з вищенаведених наборів формул, що є результатом, наприклад, випадку, коли сигнали Lt і Rt однакові і мають однакову полярність так, що на вході фільтра нижніх частот (LPF) 28 встановлюється 0 протягом довгого періоду часу, то перехід повинен відбуватися постійно вперед (panF=i і раnВ=0). Якщо коефіцієнт panF був постійно меншим за коефіцієнт раnВ, що є результатом, наприклад, випадку, коли сигнали Lt і Rt однакові, але антифазні так, що на вході у фільтрі нижніх частот (LPF) протягом довгого періоду часу повинна бути -1, то перехід повинен відбуватися постійно назад (panF=0 і раnВ=1). У випадку реальних сигналів, як це відбувається з проміжним сигналом FB, перехід має тенденцію відбуватися або постійно вперед або постійно назад. Таким чином, сигнали Lt і Rt надсилаються до виходів, які відповідають поширенню сигналів вперед, у відповідь на визначення суми сигналів Lt і Rt, яка більша за величину різниці між сигналами Lt і Rt, і сигнали Lt та Rt передаються до виходів, які відповідають поширенню сигналів назад, у відповідь на вимірювання суми сигналів Lt і Rt, яка менша за величну різниці між ними. Коли величина суми сигналів Lt і Rt співпадає з величиною різниці між ними, то сигнали Lt і Rt можуть надсилатися до виходів, які відповідають поширенню сигналів вперед, хоча це не важливо. Фіг. 2 надає приклад генерування відповідних контрольних сигналів panF і раnВ. Можуть застосовуватися модифікації з Фіг. 2, наприклад як запропоновано вище. Альтернативно, можуть використовуватися інші засоби, які забезпечують гладкі перехідні сигнали у відповідь на визначення суми і різниці сигналів Lt і Rt. Перехід Вліво - Вправо В ідеалі, перехід вліво-вправо є наступним: 3 UA 99639 C2 5 10 15 20 25 30 35 40 45 50 Коли сигнали Lt, Rt надсилаються вперед (L, R), то застосовується слабкіший перехід зліва направо, а ніж у випадку, коли сигнали Lt, Rt надсилаються назад, оскільки вони ймовірно містять усі компоненти сигналу L, C, R, вже змішані з одержанням пари стереосигналів у спосіб, який можливий для надання гарного ліво-правого звукового поля при відтворенні, включаючи центральний неправдивий сигнал. Коли сигнали Lt, Rt надсилаються назад (Ls, Rs), то визначають, у якому каналі (Ls або Rs) сигнал має більшу амплітуду, а потім модифікують сигнали Lt, Rt так, що задні сигнали зміщуються в сторону, у якій вони мають найбільшу амплітуду. Як пояснюється нижче, при реалізації винаходу таке зміщення може також мати ефект, хоча й слабкіший, коли сигнали Lt, Rt надсилаються вперед (L, R). Загальною проблемою в багатьох матричних декодерах є нездатність гарно працювати у випадку, коли вхідні сигнали надсилаються у заднє центральне положення. Це особливо є проблемою, коли при відтворенні використовують віртуалізатор для навушників або віртуалізатор для акустичної системи. Заднє центральне положення, наприклад, кодується сигналами Lt і Rt, які зміщені по фазі один відносно іншого. Тому, коли сигнали Lt, Rt надсилаються до каналів Ls, Rs, то задні центральні сигнали стають зміщеними по фазі в каналах Ls, Rs. Задній неправдивий сигнал належним чином не формується такими зміщеними по фазі сигналами. Аспектом представленого винаходу є зміщення сигналів в каналах Ls, Rs вліво або вправо, таким чином уникаючи заднього центрального неправдивого положення, яке ускладнює відтворення. Цього можна досягнути виконуючи операцію "зміщення" на сигналах Lt, Rt, як це показано на Фіг. 3 і описано нижче. Найбільше зміщення може застосовуватися до задніх центральних сигналів, а менше зміщення - для положень, розташованих послідовно з віддаленням від заднього центру. Мале зміщення (або його відсутність) може застосовуватися до передніх центральних сигналів із послідовно зростаючим зміщенням для положень, розташованих в стороні від переднього центру. Іншими словами, зміщення повинно змінювати найбільше задній центр і трохи передній центр. Шляхом уникнення або мінімізації зміщення в передньому центральному положенні за усіх умов усуваються або мінімізуються зміщення звуків (діалог), які зазвичай відбуваються на передньому центрі. В принципі, зміщувальний блок або функція може використовуватися у спосіб з прикладу Фіг. 3 для модифікації сигналів Lt, Rt на вході в будь-який з двох вхідних матричних декодерів або декодувальних функцій, при цьому декодер або декодувальна функція відповідає відносним амплітудам і полярностям сигналів Lt і Rt. Одна відповідна операція "зміщення" зображена на Фіг. 3, у якій генерується різницевий сигнал Lt-Rt. Потім, зважена величина цього різницевого сигналу змішується знову з одержанням сигналів Lt і Rt для одержання сигналів Ltbiased і Rtbiased. Контрольний вхідний сигнал (LR_Bias) може приймати значення + або - в залежності від того, чи передбачено "зміщення" для зміщення сигналів задніх каналів вліво або вправо. Сигнал LR_bias може визначатися, наприклад, як це показано в прикладі Фіг. 5. Альфа може мати величину, наприклад, в інтервалі від 0,05 до 0,2. Було виявлено, що величина 0,1 надає корисні результати. Посилаючись на деталі з Фіг. 3, сигнал Rt віднімається від сигналу Lt в блоці додавання або додавальному пристрої 32 для одержання сигналу Lt-Rt, який потім масшатбується сигналом LR_bias в блоці множення або функцією 34 множення. Масштабований сигнал Lt-Rt потім сумується з кожним із сигналів Lt і Rt у відповідних блоках додавання або функціях 36 і 38 додавання для одержання сигналів Ltbiased і Rtbiased. Розглянемо декілька прикладів роботи зміщувального блоку з Фіг. 3. Наприклад, коли сигнал LR_Bias = +0,1 (вказуючи, що зміщення повинно бути вліво), то маємо: Ltbiased=Lt+[0,1x(U-Rt)] = 1,1xLt-0,1xRt (9) Rtbiased=Rt+[0,1x(Lt-Rt)] = 0,9xRt+0,1xLt Продовжуючи цей приклад (LR_Bias = +0,1), розглянемо випадок, де вхідний сигнал Lt, Rt сформований надісланим до центру сигналом: Lt=Rt=С. У цьому випадку маємо: Lt=Rt=C Ltbiased=Lt+[0,1x(Lt-Rt)J = 1,1xLt-0,1xRt (10) = 1,1xC-0,1xC =C Rtbiased=Rt+[0,1x(Lt-Rt)] 4 UA 99639 C2 5 10 15 20 25 30 35 40 45 = 0,9xRt+0,1xLt = 0,9xC+0,1xC =C У цьому випадку, сигнали Ltbiased і Rtbiased є сигналами Lt, Rt. Іншими словами, зміщувальна схема не змінює сигнали Lt, Rt, коли вхідний сигнал включає тільки надісланий до переднього центру аудіосигнал. На противагу цьому, розглянемо випадок, де вхідний сигнал Lt, Rt сформований надісланим до заднього центру сигналом, S:Lt=S, Rt = -S. У цьому випадку, маємо: Lt=S, Rt=-S Ltbiased=Lt+[0,1x(Lt-Rt)] = 1,1xLt-0,1xRt = 1,1xS-0,1x(-S) = 1,2xS (11) Rtbiased=Rt+[0,1x(Lt-Rt)] = 0,9xRt+0,1xLt =0,9x(-S)+0,1xS = -0,8xS У цьому випадку, сигнали Ltbiased і Rtbiased модифікуються зміщувальною схемою або процесом так, що збільшується амплітуда сигналу Ltbiased, а амплітуда сигналу Rtbiased зменшується. Відмічаємо, що, коли сигналу LR_Bias надається значення -0,1 замість +0,1, то зміни амплітуди повинні міняти напрям, причому рівень сигналу Rtbiased підсилюється, тоді як рівень сигналу Ltbiased послаблюється. В ідеалі, зміщувальна схема або процес працює так, що об'ємний звук каналів зміщуються вліво або вправо, а звук передніх каналів зміщується подібним чином, проте в меншій степені. Приклад зміщення вліво зображений на Фіг. 4, у якому коло, зображене суцільною лінією, представляє матричне кодувальне коло, у якому зображені традиційні положення каналів L (лівий), С (центральний), R (правий), Ls (лівий об'єм), S (об'єм або задній об'єм) і Rs (правий об'єм). Це коло має одиничний радіус, який відображає той факт, що кожен канал має одиничну потужність. Коло, зображене штриховою лінією, показує вплив операції зміщення на одиничне коло. Зміщення в сторону від одиничного кола вказує, що потужність в деяких напрямах поширення сигналу збільшена або зменшена. Зокрема, відмічаємо, що заднє центральне положення S зміщене на найбільшу величину з поступовим зменшенням зміщення для напрямів, що все далі й далі знаходяться від положення S, без зміщення, яке має місце в передньому центральному положенні С. Приклад для визначення відповідного сигналу LR_bias зображений на Фіг. 5. Сигнал LR_bias базується в основному на сигналі LR, короткочасовій осередненій різниці амплітуд сигналів Ltbiased і Rtbiased. Іншими словами, сигнал LR є залежність сигналу Ltbiased від сигналу Rtbiased. Величина LR_Bias обраховується у пристрої або функцією 40 "Визначення Зміщення" у відповідь на інформацію про те, чи кожен із сигналів LR, FB (Фіг. 2) менший за або більший за порогову величину, і у відповідь на сигнал Lt-Rt. Такий обрахунок може виражатися програмним псевдокодом: If (zero_crossing (Lt-Rt) && (FB
ДивитисяДодаткова інформація
Назва патенту англійськоюMatrix decoder
Автори англійськоюMcgrath, David S., Chabanne, Christophe
Назва патенту російськоюМатричный декодер
Автори російськоюМакграт Девид С., Шабан Кристоф
МПК / Мітки
МПК: H04S 3/00
Код посилання
<a href="https://ua.patents.su/13-99639-matrichnijj-dekoder.html" target="_blank" rel="follow" title="База патентів України">Матричний декодер</a>
Декодер згорткового коду
Номер патенту: 25556
Опубліковано: 30.10.1998
Автори: Дунець Богдан Романович, Мельник Анатолій Олексійович
МПК: H03M 13/23
Мітки: коду, згорткового, декодер
Формула / Реферат:
Декодер згорткового коду, що містить перший віднімач, блок тактування, перший, другий, третій виходи якого з'єднані відповідно з першим входом блока обчислення метрик гілок, першим входом блока обчислення метрик, першим входом регістра, який відрізняється тим, що в нього введені перший, другий і третій комутатори, блок прийняття рішення, другий віднімай, регістр корекції, кодер, блок порівняння, перший, другий, третій, четвертий регістри...
Декодер для інтерактивного цифрового телевізійного мовлення
Номер патенту: 26563
Опубліковано: 25.09.2007
Автори: Немчин Олександр Федорович, Савел'єв Михайло Михайлович, Дорофій Сергій Миколайович, Дрюкова Катерина Юріївна, Касперов Олексій Петрович, Яковлев Віталій Васильович
МПК: H04B 1/00, H04L 12/28, H04Q 3/64
Мітки: інтерактивного, цифрового, декодер, мовлення, телевізійного
Формула / Реферат:
Декодер, що включає процесор, зв'язаний з пам'яттю і виконаний з можливістю одержання інтерактивної цифрової телевізійної передачі у формі цифрового сигналу, що містить перший потік даних, що відповідає стиснутим відеозображенням, і другий потік даних, відповідний щонайменше одному мультимедійному додатку, і сервісні сигнали, призначені для керування зазначеними потоками даних, який відрізняється тим, що додатково виконано з можливістю при...
Матричний тригер
Номер патенту: 36651
Опубліковано: 10.11.2008
Автор: Тимошенко Анатолій Григорович
МПК: G06F 15/00
Формула / Реферат:
Матричний тригер для відображення стану моделі задачі про призначення, яка містить матричну запам'ятовуючу схему, кожний елемент якої має схему АБО з установчим входом та з інверсним виходом, який відрізняється тим, що входи кожного елемента матричної структури з'єднані з інверсними виходами елементів того ж рядка та того ж стовпчика.
Матричний тригер
Номер патенту: 36652
Опубліковано: 10.11.2008
Автори: Зеленський Кирило Харитонович, Забара Станіслав Сергійович, Тимошенко Анатолій Григорович
МПК: G06F 15/00
Формула / Реферат:
Матричний тригер для відображення стану моделі задачі про призначення, яка містить матричну запам'ятовуючу схему, кожний елемент якої має схему АБО з установчим входом та з інверсним виходом, який відрізняється тим, що в кожний елемент матричної структури замість другої схеми АБО з інверсним виходом включена схема І, входи якої з'єднані з інверсними виходами схем АБО елементів того ж рядка та того ж стовпчика, а вихід схеми І з'єднаний з...
Матричний екран для відтворення напівтонових кольорових зображень
Номер патенту: 31854
Опубліковано: 25.04.2008
Автори: Волонтир Людмила Олексіївна, Кожем'яко Володимир Прокопович, Тодорашко Наталія Іванівна, Дорощенков Геннадій Дмитрович
МПК: H04N 5/66
Мітки: екран, відтворення, кольорових, матричний, зображень, напівтонових
Формула / Реферат:
Матричний екран для відтворення напівтонових кольорових зображень, який містить комірок зображення, кожна ij-та комірка зображення містить елемент комутації, вихід якого з'єднаний з світловипромінювальним елементом, який відрізняється тим, що в нього введено D-тригерів, причому інформаційний вхід D і...
Попередній патент: Оксазолідинони для лікування та/або профілактики серцевої недостатності
Наступний патент: Спосіб одержання гідроброміду даріфенацину
Випадковий патент: Бокова стінка для машини безперервного розливу металевого листа, машина безперервного розливу металевого листа і машина безперервного розливу тонких металевих виробів