Лінійна напрямна на постійних магнітах
Номер патенту: 103948
Опубліковано: 10.12.2013
Автори: Тарасов Віктор Олексійович, Зіненко Володимир Миколайович, Гриценко Володимир Ілліч
Формула / Реферат
Лінійна напрямна на постійних магнітах, яка включає основу, рухомий вузол, встановлений з можливістю переміщення по основі, та блок стабілізації положення рухомого вузла, яка відрізняється тим, що на верхній і нижній стінках рухомого вузла попарно один проти одного по вертикальних площинах установлені по чотири силових магнітних відштовхувачі, кожен з яких включає встановлений у втулку магніт, встановлений в ізолятор п'єзоелектричний двигун та регулювальний гвинт, причому між магнітом і п'єзоелектричним двигуном встановлені екран та ізолятор, а між регулювальним гвинтом і п'єзоелектричним двигуном встановлений ізолятор, при цьому на верхній стінці рухомого вузла встановлені чотири блоки датчиків величин зазорів, в кожному з яких установлені по два датчики величини зазору, причому центри основ датчиків в кожному блоці лежать на прямих, паралельних напрямку переміщення рухомого вузла, причому кожний силовий магнітний відштовхувач розміщений поруч з тим блоком датчиків величин зазору, з датчиками якого він зв'язаний електрично, при цьому основа виконана у вигляді балки, на верхній і нижній гранях якої по сліду переміщення силових магнітних відштовхувачів установлені магніти, які від балки відділені П-подібними екранами, установленими в П-подібні керамічні короби, причому на верхній грані балки по сліду переміщення датчиків величин зазорів установлені металеві штаби, які відділені від балки П-подібними екранами і керамічними пластинами, а між металевими штабами установлена металева вставка для прикріплення штовхачів крокового п'єзоелектричного двигуна, причому верхня і нижня стінки рухомого вузла з верхньою і нижньою гранями основи утворюють несучу двосторонню плоску опору на постійних магнітах, при цьому на бокових стінках рухомого вузла по прямих, які паралельні напрямку переміщення рухомого вузла, встановлені силові магнітні відштовхувачі, кожен з яких включає магніт, встановлений у втулку, та регулювальний гвинт, причому між магнітами і регулювальними гвинтами встановлені екрани, причому на бокових гранях балки по сліду переміщення силових магнітних відштовхувачів установлені магніти, які також від балки відділені П-подібними екранами, встановленими в П-подібні керамічні короби, причому бокові стінки рухомого вузла з боковими гранями основи утворюють замикаючу двосторонню плоску опору на постійних магнітах, при цьому блок стабілізації положення рухомого вузла включає згадані блоки датчиків величин зазорів, вимірювачі величин зазорів, обчислювач, кроковий п'єзоелектричний двигун, який включає штовхач прямого ходу та штовхач зворотного ходу, пристрій управління штовхачами, операційні підсилювачі, перемикачі, диференційні підсилювачі та силові магнітні відштовхувачі несучої двосторонньої плоскої опори на постійних магнітах, причому перші датчики і другі датчики блоків датчиків величин зазору з'єднані з входами вимірювачів величин зазорів, виходи яких з'єднані з входами обчислювача, вхід штовхача прямого ходу з'єднаний з виходом пристрою управління штовхачами, а його вихід з'єднаний з входом пристрою управління штовхачами, вхід штовхача зворотного ходу з'єднаний з виходом пристрою управління штовхачами, а його вихід з'єднаний з входом пристрою управління штовхачами, також вихід пристрою управління штовхачами з'єднаний з входом обчислювача, вихід якого з'єднаний з входом пристрою управління штовхачами, входи операційних підсилювачів з'єднані з виходами обчислювача, а їх виходи через перемикач "більше - вимк. - менше" з'єднані з входами відповідних диференційних підсилювачів, входи диференційних підсилювачів через перемикач "робота - вимк." з'єднані з виходами обчислювача, а їх виходи з'єднані з п'єзоелектричними двигунами силових магнітних відштовхувачів несучої двосторонньої плоскої опори на постійних магнітах.
Текст
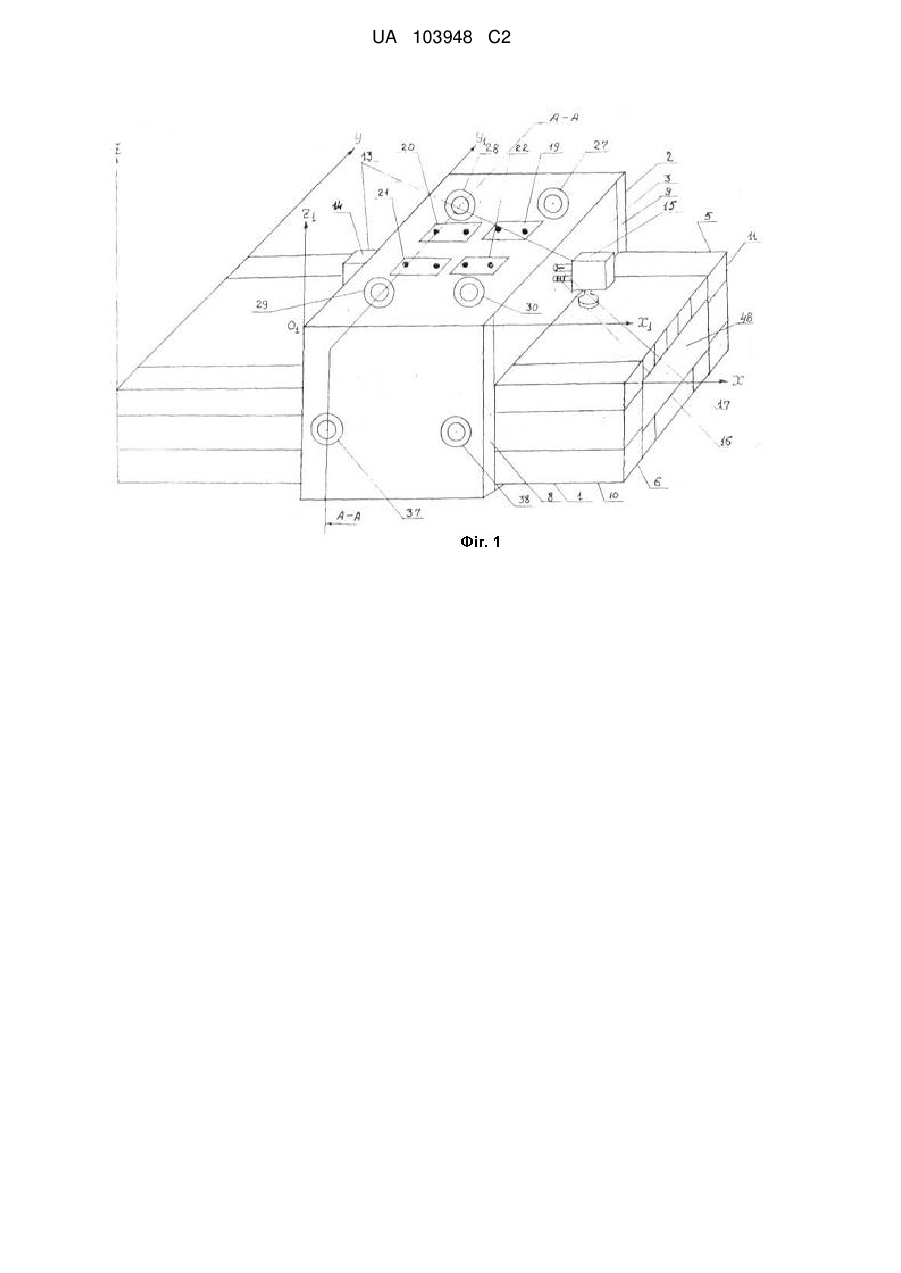
Реферат: Винахід належить до верстатобудування і може використовуватись в прецизійних верстатах. Лінійна напрямна на постійних магнітах містить основу, рухомий вузол, встановлений з можливістю переміщення по основі, та блок стабілізації положення рухомого вузла. Стінки рухомого вузла з відповідними гранями основи напрямної утворюють дві двосторонні плоскі опори на постійних магнітах: верхня стінка і нижня стінка рухомого вузла з верхньою граню і нижньою граню основи напрямної утворюють несучу двосторонню плоску опору на постійних магнітах, а бокові стінки рухомого вузла з боковими гранями основи напрямної утворюють замикаючу двосторонню плоску опору на постійних магнітах. Переміщення рухомого вузла здійснюється кроковим п'єзоелектричним двигуном, який оснащений штовхачами прямого та зворотного ходу. Управління переміщенням рухомого вузла здійснюється пристроєм управління штовхачами, який входить до складу блока стабілізації положення рухомого вузла. Винахід забезпечує погрішність стабілізації положення рухомого вузла лінійної напрямної на постійних магнітах відносно площини стабілізації не більше 0,05 мкм. UA 103948 C2 (12) UA 103948 C2 UA 103948 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до верстатобудування і може використовуватись у верстатах особливо високої точності. Відомий патент України № 14905 А опублікований 30.06.97 р. бюл. № 3 "Спосіб стабілізації положення рухомого елемента аеростатичної напрямної та пристрій для його здійснення". Пристрій стабілізації положення рухомого елемента аеростатичної напрямної вибраний як найближчий аналог. Рухомий вузол напрямної найближчого аналога по основі напрямної переміщується кроковим п'єзоелектричним двигуном (патент України № 36597 від 16.04 2001 р. бюл. № 3) з регульованим кроком мікропереміщення, який вимірюється. До п'єзоелектричного двигуна входять штовхач прямого ходу, штовхач зворотного ходу і пристрій управління штовхачами. Пристрій управління штовхачами забезпечує установлення кроку мікропереміщення рухомого вузла, переміщення рухомого вузла в прямому і зворотному напрямку, вимірювання кроку мікропереміщення. В верхній, нижній і бокових стінках рухомого вузла виконані жиклери подачі газу в зазори між цими стінками рухомого вузла і гранями основи аеростатичної напрямної. Отже, верхня і нижня стінки рухомого вузла з верхньою і нижньою гранями основи напрямної утворюють несучу плоску аеростатичну опору, а бокові стінки рухомого вузла з боковими гранями основи аеростатичної напрямної утворюють замикаючу плоску в аеростатичну опору. На верхній стінці рухомого вузла встановлені три блоки датчиків величин зазорів - по два датчики величин зазорів в кожному. У безпосередній близькості від кожного з цих блоків датчиків встановлений електрично зв'язаний з датчиками блока датчиків регулятор тиску (а. с. СРСР № 1500805 "Аеростатична шпиндельна опора") в зазорі між верхньою граню основи напрямної і верхньою стінкою рухомого вузла напрямної, що забезпечує стабілізацію його положення відносно нерухомої у просторі площині. В склад пристрою стабілізації рухомого вузла аеростатичної напрямної входить також блок стабілізації положення рухомого вузла аеростатичної напрямної, який забезпечує стабілізацію рухомого вузла відносно нерухомої у просторі площині по способу опорних зазорів. В склад блока входять: блоки датчиків величин зазорів, цифровий блок, п'єзоелектричний двигун, операційні підсилювачі, перемикачі, диференційні підсилювачі. Пристрій стабілізації положення рухомого вузла найближчого аналога забезпечує високу точність стабілізації, але потребує для своєї роботи надходження газу на піддув несучої і замикаючої плоских аеростатичних опор (компресорної установки). Задача, що вирішується, полягає у такому удосконаленні пристрою найближчого аналога, при якому плоска несуча і плоска замикаюча аеростатичні опори замінюються на плоску несучу і плоску замикаючу опори на постійних магнітах. В результаті відпадає потреба подачі газу на піддув плоских опор, а, отже, пристрій стабілізації положення рухомого вузла лінійної напрямної стає енергозберігаючим. Це досягається тим, що пристрій стабілізації положення рухомого вузла лінійної напрямної на постійних магнітах, який включає основу лінійної напрямної, рухомий вузол лінійної напрямної, блок стабілізації положення рухомого вузла лінійної напрямної на постійних магнітах, який відрізняється тим, що на верхній і нижній стінках рухомого вузла попарно один проти одного по вертикальних осях симетрії установлені по чотири силових магнітних відштовхувачі, кожний силовий магнітний відштовхувач включає магніт силового магнітного відштовхувача, який установлений у втулку, встановлений в ізолятор п'єзоелектричний двигун, а між магнітом силового магнітного відштовхувача і п'єзоелектричним двигуном встановлені екран і ізолятор, регулювальний гвинт, а між регулювальним гвинтом і п'єзоелектричним двигуном встановлений ізолятор, на верхній стінці рухомого вузла встановлені чотири блока датчиків величин зазорів, в кожному блоці датчиків величин зазорів установлені по два датчики величини зазору причому, центри основ датчиків величин зазорів в кожному блоці датчиків лежать на прямих, паралельних напрямку переміщення рухомого вузла, а кожний силовий магнітний відштовхувач, встановлений поруч з тим блоком датчиків, з датчиками величин зазорів якого він зв'язаний електрично, на верхній і нижній гранях балки основа лінійної напрямної на постійних магнітах по сліду переміщення силових магнітних відштовхувачів установлені магніти основи лінійної напрямної, які від балки основи лінійної напрямної відділені П-подібними екранами, установленими в П-подібні керамічні короби, на верхній грані балки основи напрямної на постійних магнітах по сліду переміщення датчиків блоків датчиків величин зазорів установлені металеві штаби, які відділені від балки основи лінійної напрямної Пподібними екранами и керамічними пластинами, а між металевими штабами установлена металева уставка прикріплення штовхачів п'єзоелектричного двигуна. причому, верхня і нижня стінки рухомого вузла лінійної напрямної на постійних магнітах з верхньою і нижньою гранями основи напрямної утворюють несущу двосторонню плоску опору на постійних магнітах, на 1 UA 103948 C2 5 10 15 20 25 30 35 40 бокових стінках рухомого вузла лінійної напрямної по прямих, які паралельні напрямку переміщення рухомого вузла, установлені силові магнітні відштовхувачі, які включають магніти силових магнітних відштовхувачів, установлених у втулках, регулювальний гвинт, регулювальний гвинт, а між магнітами силових магнітних відштовхувачів і регулювальними гвинтами встановлені екрани, на бокових гранях балка основи лінійної напрямної по сліду переміщення силових магнітних відштовхувачів установлені магніти основи лінійної напрямної, які також від балки основи лінійної напрямної відділені П-подібними екранами, встановленими в П-подібні керамічні короби, бокові стінки рухомого вузла лінійної напрямної з боковими гранями основи лінійної напрямної утворюють замикаючу двосторонню плоску опору на постійних магнітах, блок стабілізації положення рухомого вузла лінійної напрямної на постійних магнітах включає блоки датчиків величин зазорів, вимірювачі величин зазорів, обчислювач, штовхач прямого ходу, п'єзоелектричний двигун, який включає штовхач зворотного ходу, пристрій управління штовхачами, операційні підсилювачі, перемикачі, диференційні підсилювачі, силові магнітні відштовхувачі, причому перші датчики і другі датчики блоків датчиків з'єднані з входами вимірювачів величин зазорів, виходи вимірювачів величин зазорів з'єднані з входами обчислювача, вхід штовхача прямого ходу з'єднаний з виходом пристрою управління штовхачами, а його вихід з'єднаний з входом пристрою управління штовхачами, вхід штовхача зворотного ходу з'єднаний з виходом пристрою управління штовхачами, а його вихід з'єднаний з входом пристрою управління штовхачами, вихід пристрою управління штовхачами з'єднаний з входом обчислювача, а його вихід з'єднаний з входом пристрою управління штовхачами, входи операційних підсилювачів з'єднані з виходами обчислювача, а їх виходи через перемикач "більше - вимк. - менше" з'єднані з входами відповідних диференційних підсилювачів, входи диференційних підсилювачів через перемикач "робота - вимк." з'єднані з виходами обчислювача, а їх виходи з'єднані з п'єзоелектричними двигунами силових магнітних відштовхувачів несущої двосторонньої плоскої пори на постійних магнітах. Причинно-наслідковий зв'язок технічного рішення, що заявляється, з технічним результатом, що досягається, полягає у наступному. На Фіг. 1 представлена лінійна напрямна на постійних магнітах. Рухомий вузол 2 напрямної переміщується по основі 1 напрямної кроковим п'єзоелектричним двигуном 13. На верхній стінці 3 і нижній стінці 4 рухомого вузла 2 один проти одного по вертикальних осях симетрії встановлені по чотири магнітних відштовхувачі 27-34 з регульованою силою відштовхування. На верхній грані 5 і нижній грані 6 основи 1 напрямної (Фіг. 3) по сліду переміщення силових магнітних відштовхувачів установлені магніти 40 напрямної. Сила відштовхування між магнітами 39 силових магнітних відштовхувачів і магнітами 40 напрямної регулюється шляхом зміни величин зазорів між цими магнітами п'єзоелектричними двигунами 44 (Фіг. 3) силових магнітних відштовхувачів. Стінки рухомого вузла з верхньою граню 5 і нижньою граню 6 основи 1 напрямної утворюють плоску двосторонню опору на постійних магнітах. Для розрахунку сили відштовхування магніту силового магнітного відштовхувача приймемо, що намагніченість ММВ багато більше намагніченості ММО магніту напрямної (ММВ>ММО). Таке припущення дозволяє вважати, що сила відштовхування між цими магнітами створюється магнітом силового магнітного відштовхувача і розраховується по формулі (Пятин Ю.М., Постоянные магниты, М.: Энергия, 1980): FMB 45 , (1) 2 0 1 2l3 / QMBlMB де: QМВ - магнітна жорсткість магніту відштовхувача, l3 - величина зазору між магнітом відштовхувача і магнітом напрямної. На другому етапі розрахунку приймемо, що ММВ=ММО і сила відштовхування між магнітами створюється магнітом основи напрямної: FMO 50 2 BMBSMB 2 BMOSMO , (2) 2 0 1 2l3 / QMOlMO де: QМО - магнітна жорсткість магніту основи напрямної, lМО - відрізок довжина магніту основи напрямної, який дорівнює діаметру магніту відштовхувача. Тоді сила відштовхування FBО між силовим магнітним підштовхувачем і магнітом основи напрямної: FBO=FMB+FMO. (3) Несуча здатність пари силових магнітних відштовхувачів, установлених по одній осі: РBO nes=FBO2-FBO1, (4) 2 UA 103948 C2 5 10 де: FBO2 - сила відштовхування між силовим магнітним підштовхувачем і магнітом основи напрямної на нижній грані основи, FBO1 - сила відштовхування між силовим магнітним відштовхувачем і магнітом основи напрямної на верхній грані основи. Несуча здатність двосторонньої плоскої несущої опори на постійних магнітах: PBO nes oporu=PBO nes1·4. (5) Нехай подачею сигналу управління +Uyпp. на п'єзоелектричний двигун силового магнітного відштовхувача, який установлений на нижній стінці рухомого вузла зазор під магнітами зменшився на Vl мкм, а подачею сигналу управління +Uyпp. на п'єзоелектричний двигун силового магнітного відштовхувача, який встановлений на верхній стінці рухомого вузла, зазор під магнітами зменшився на Vl мкм. Сила відштовхування магнітом силового магнітного відштовхувача магніта основи напрямної на нижній грані основи збільшиться і буде дорівнювати: FMB1 15 2 BMBSMB . (6) 2 0 1 2l3 Vl / QMBlMB Сила відштовхування магніту силового магнітного відштовхувача магнітом основи напрямної на нижній грані напрямної також збільшиться і буде дорівнювати: FMO1 2 BMOSMO . (7) 2 0 1 2l3 Vl / QMOlMO Сила відштовхування магнітом силового магнітного відштовхувача магніту основи напрямної на верхній грані основи зменшиться і буде дорівнювати: FMB2 20 . (6) 2 0 1 2l3 Vl / QMBlMB Сила відштовхування магніту силового магнітного відштовхувача магнітом основи напрямної на верхній грані напрямної також зменшиться і буде дорівнювати: FMO2 25 30 35 40 45 50 2 BMBSMB 2 BMOSMO . (8) 2 0 1 2l3 Vl / QMOlMO Якщо Vl=max, несуча здатність несущої плоскої опори на постійних магнітах дорівнює PBO nes oporu=[(FMB2+FMO2)-(FMB1+FMO2)]·4. (9) Як показали розрахунки, несуча здатність двосторонньої плоскої опори на постійних магнітах при прийнятних розмірів магнітів і магнітній індукції магнітів 1,35 Тл≤Вr≤2,5 Тл перевищує 10 кН. Жорсткість опорі G≥100 Н, що не менш жорсткості двосторонніх плоских аеростатичних опор. Для стабілізації положення рухомого вузла лінійної напрямної на постійних магнітах відносно нерухомої у просторі площині застосовується спосіб опорних зазорів. Для його застосування основи датчиків блоків 19, 20, 21, 22 датчиків величин зазорів установлюють в одну площину за допомогою інтерферометра. Інтерферометри для контролю плоскостей дозволяють установити датчиків блоків датчиків в одну площина з погрішністю ≈0,03 мкм (Коломийцов Ю.В., Интерферометры, Л.: Машиностроение, 1976). Використання методу "пробного скла" (див. там же) дозволяє зменшити погрішність установки основ датчиків в одну площину до ≤0,006 мкм. Стабілізація положення рухомого вузла лінійної напрямної здійснюється наступним чином. Отже, блоки датчиків на верхній стінці рухомого вузла 20 21 22 установлені так, що центри основ датчиків C19 і C19 , C1 і C20 , C1 і C 21 , C1 і C22 19, 20, 21 і 2 2 2 1 2 22 блоків датчиків лежать в одній площині. Установимо рухомий вузол в похідне для переміщення положення. Подамо на п'єзоелектричні двигуни пар силових магнітних відштовхувачів 27, 31, 28 і 32, 29 і 33, 30 і 34 напруги початкових значень сигналів управління 20 21 22 U27 . , U28 . , U29 . , U30 . такі, що під першими датчиками C19 , C1 , C1 , C1 блоків датчиків óïð óïð óïð óïð 1 будуть установлені розрахункові величин зазорів. Площину Q, яка паралельна площині установки основ датчиків при поданих початкових сигналах управління і розташована на довільній відстані від основ датчиків, приймемо як площину стабілізації або базову площину. Положення рухомого вузла в похідному для переміщення положенні і при початкових сигналах управління, яке він займає відносно базової площині Q, приймається як його незбурене положення відносно цієї нерухомої у просторі площині. Для зберігання в процесі переміщення рухомого вузла сталості відстаней від центрів основ датчиків до базової площині Q застосуємо спосіб опорних зазорів. При незбуреному положенні 3 UA 103948 C2 рухомого вузла відносно базової площині вимірюються і запам'ятовуються як опорні величини 20 21 22 зазорів C19 , C1 , C1 , C1 під першими датчиками кожної групи датчиків: 1 5 10 21 21 22 22 20 20 Z19 1 Z19 1 , Z1on 1 Z1 1 , Z1on 1 Z1 1 , Z1on 1 Z1 1 . 1on 1 Для установки рухомого вузла в незбурене положення на другій дискреті стабілізації. Рухомий вузол переміщується з початкового положення на величину дискрети стабілізації l. В результаті другі датчики кожної групи датчиків розташуються над тими ж точками основи напрямної, над якими розташовувались перші датчики в початковому положенні рухомого вузла. Так як основи перших і других датчиків кожної групи датчиків розташовані в одній площині, умовою збереження положення рухомого вузла відносно базової площині Q незалежно від рельєфу поверхні основи напрямної є рівність величин зазорів під другими датчиками після переміщення рухомого вузла на дискрету стабілізації l величинам відповідних опорних зазорів: 21 22 20 Z19 2 Z19 1 , Z 20 2 Z1on 1 , Z 21 2 Z1on 1 , Z 22 2 Z1on 1 . (10) 2 1on 2 2 2 Подачею сигналів управління U27 . , U28 . , U29 . , U30 . на силові магнітні відштовхувачі на óïð óïð óïð óïð 15 20 25 30 35 40 45 50 55 другій дискреті стабілізації під другими датчиками величин зазорів установлюють величини зазорів, які дорівнюють величинам зазорів згідно (10). В результаті рухомий вузол буде встановлений в незбурене положення відносно площині Q. 20 21 22 Вимірюють і запам'ятовують як опорні зазори Z19 2 , Z1on 2 , Z1on 2 , Z1on 2 під першими 1on датчиками для установки рухомого вузла в незбурене положення на третій дискреті стабілізації: 21 22 20 Z19 3 Z19 2 , Z 20 3 Z1on 2 , Z 21 3 Z1on 2 , Z 22 3 Z1on 2 . 2 2 2 1on 2 Ці установки і вимірювання виконуються на кожній дискреті стабілізації до переміщення рухомого вузла в кінцеве положення. В результаті буде сформований масив опорних зазорів, які забезпечують на дискретах стабілізації установку рухомого вузла в незбурене положення. В процесі роботи на кожній дискреті стабілізації потокові величини зазорів під першими датчиками кожного блоку датчиків порівнюються з відповідними величинами опорних зазорів для даної дискрети стабілізації. При відхиленні поточних величин зазорів від відповідних опорних зазорів формуються сигнали управління U27 . , U28 . , U29 . , U30 . , які запобігають відхиленню рухомого óïð óïð óïð óïð вузла лінійної напрямної на постійних магнітах від площині стабілізації. Винахід пояснюється кресленнями: Фіг. 1 - лінійна напрямна на постійних магнітах (загальний вигляд); Фіг. 2 - основа лінійної напрямної на постійних магнітах (вигляд з боку); Фіг. 3 - переріз Фіг. 1 по А-А; Фіг. 4 - блоки датчиків величин зазорів; Фіг. 5 - блок стабілізації положення рухомого вузла лінійної напрямної на постійних магнітах. Пристрій стабілізації положення рухомого вузла лінійної напрямної на постійних магнітах (Фіг. 4) включає основу 1 лінійної напрямної, по якій переміщується рухомий вузол 2 (Фіг. 1, 2). Стінки рухомого вузла з відповідними гранями основи напрямної утворюють дві двосторонні плоскі опори на постійних магнітах: верхня стінка 3 і нижня стінка 4 рухомого вузла 2 з верхньою граню 5 і нижньою граню 6 основи 1 напрямної утворюють несучу двосторонню плоску опору 7 на постійних магнітах (Фіг. 3), бокові стінки 8 і 9 рухомого вузла з боковими гранями 10 і 11 основи напрямної утворюють замикаючу двосторонню плоску опору 12 на постійних магнітах. Переміщення рухомого вузла 2 здійснюється кроковим п'єзоелектричним двигуном 13 (патент України № 36597, 2001, бюл. № 3), який оснащений вимірювачем кроку мікропереміщення і інваріантний до траєкторії переміщення рухомого вузла 2. П'єзоелектричний двигун 13, штовхач 14 прямого ходу і штовхач 15 зворотного ходу забезпечують переміщення рухомого вузла в прямому і зворотному напрямках, відповідно. Одне плече кожного штовхача з установленим у ньому п'єзостовпом 16 прикріплене до рухомого вузла, а друге, в торці якого установлений датчик 17 величини кроку переміщення, установлено з зазором відносно рухомого вузла напрямної. Управління переміщенням рухомого вузла здійснюється пристроєм 18 управління штовхачами, який забезпечує крокове переміщення рухомого вузла з величиною кроку переміщення, що вимірюється і регулюється. Пристрій 18 управління штовхачами формує пилкоподібну напругу переміщення рухомого вузла на п'єзостовпи 16 штовхачів, сигнали прикріплення і відкріплення штовхачів, сигнали фіксації нульових зазорів. Сигнали датчиків 17 величини кроку мікропереміщення штовхачів надходять в пристрій управління штовхачами. 4 UA 103948 C2 5 10 15 20 25 30 35 40 45 50 55 Величина m(j) кожного j-го кроку мікропереміщення рухомого вузла обчислюється як різниця величин зазорів Zk(j) і Zn(j) під датчиком величини кроку мікропереміщення рухомого після закінчення кроку мікропереміщення і до його початку: m(j)=Zk(j)-Zn(j). На верхній стінці рухомого вузла симетрично відносно його сторін установлені блоки 19, 20, 21, 22 датчиків величин зазорів між основами датчиків і верхньою граню 5 основи напрямної. В кожному блоці датчиків (Фіг. 4) установлені перший (по прямому напрямку переміщення рухомого вузла) датчик 23 і другий датчик 24 величини зазору. Відстані між центрами основ перших і других датчиків 23 і 24 однакові і дорівнюють дискреті стабілізації l. Датчики 23 і 24 блоків датчиків 19, 20, 21, 22 установлені в керамічні ізолятори 25, які закриті екранами 26 з магнітном'якого матеріалу, що запобігає проникненню поля розпорошування магнітів лінійної напрямної в ці датчики 23, 24. Причому блоки датчиків 19-22 можуть зміщуватися по висоті зазору шляхом зміщення екранів 26. На верхній стінці 3 рухомого вузла 2 симетрично відносно блоків датчиків і по їх зовнішніх сторонах установлені силові магнітні відштовхувачі 27, 28, 29, 30 з регульованою силою відштовхування (Фіг. 1, 3), які являють собою регулятори положення рухомого вузла 2 відносно нерухомої у просторі площині. На нижній стінці рухомого вузла також установлені силові магнітні відштовхувачі 31, 32, 33, 34 з регульованою силою відштовхування. Силові магнітні відштовхувачі 27-30 і 31-34 на верхній і нижній стінках 3 і 4 рухомого вузла 2 установлені попарно один проти одного по вертикальних осях симетрії. На обох бокових стінках 8 і 9 рухомого вузла 2 по прямих, які паралельні напрямку переміщення рухомого вузла 2 установлені силові магнітні відштовхувачі 35, 36 і 37, 38 замикаючої плоскої опори 12. Кожний силовий магнітний відштовхувач 27-34 включає магніт 39 силового магнітного відштовхувача, виготовлений з магнітнотвердого закритичного матеріалу (наприклад, фериту або РМЗ). Всі магніти 39 силових магнітних відштовхувачів обернуто до магнітів 40 основи 1 напрямної однойменними полюсами. Для концентрації поля магнітів 39 силових магнітних відштовхувачів в зазорах плоскої опори 12 на постійних магнітах вони установлені у втулках 41, з магнітном'якого матеріалу з великою магнітною проникливістю, наприклад, з пермюндера з r≥60000. Екран 42 установлений між магнітом 39 силового магнітного відштовхувача і ізолятором 43 і запобігає проникненню магнітного потоку магніту 39 відштовхувача в п'єзоелектричний двигун 44 силового магнітного відштовхувача. 45 - ізолятор п'єзоелектричного двигуна 44, 46 - регулювальний гвинт для установки величини зазору під полюсом магніту 39 силового магнітного відштовхувача. Між регулювальними гвинтами 46 і магнітами 39 відштовхувачів установлені ізолятори 47. Силові магнітні відштовхувачі 35-38 замикаючої плоскої опори 7 включають магніти 39 силових магнітних відштовхувачів, які встановлені у втулки 41, екран 42 встановлений між магнітом 39 відштовхувача і регулювальним гвинтом 46. Їх сила відштовхування може регулюватися тільки регулювальним гвинтом 46. Основа 1 напрямної являє собою балку 48 основи напрямної прямокутного перерізу на верхній грані 5 і нижній грані 6 якої по сліду переміщення силових магнітних відштовхувачів 2738 розташовані магніти 40 основи напрямної, які виконані з закритичного матеріалу (фериту або РМЗ) з магнітною жорсткістю ≈1, що забезпечує їх рівномірну намагніченість по всій довжині магніту. Для концентрації магнітного потоку магнітів 40 основи напрямної в зазорі між цими магнітами і магнітами 39 силових магнітних відштовхувачів, а також запобіганню проникнення їх магнітного потоку в балку 48 і далі на датчики 23, 24 блоків 19-22 датчиків, магніти 40 установлені в екрани 49 П-подібного перерізу, які виконані з магнітном'якого матеріалу (пермюндера). Для послаблення поля розпорошування екранів 49 вони установлені в керамічні короби 50 П-подібного перерізу, установлених на гранях балки 48. По сліду переміщення датчиків блоків датчиків 19, 20, 21, 22 на верхній грані балки 48 розміщені металеві штаби 51, по величині ємності між якими і основами датчиків 23, 24 величин зазорів визначається величина зазору. Для запобіганню проникненню поля розпорошування магнітів 39 і магнітів 40 на ці датчики вони установлені в П-подібні екрани 52 і відділені від верхньої грані 5 основи напрямної керамічними пластинами 53. Між металевими штабами 51 на верхній грані 5 балки 48 також укріплена металева вставка 54 з феромагнітного матеріалу, до якої в процесі переміщення рухомого вузла 2 прикріплюються штовхачі 14 і 15 п'єзоелектричного двигуна 13. На бокових гранях балки 48 основи напрямної по сліду переміщення магнітних силових відштовхувачів 35-38 в П-подібних екранах 49 установлені магніти 40 основи 1 напрямної, які також установлені в П-подібні керамічні короби 50. 5 UA 103948 C2 5 10 15 20 25 30 35 40 45 50 55 60 Блок 55 стабілізації положення рухомого вузла лінійної напрямної на постійних магнітах (Фіг. 5) відносно нерухомої у просторі площині забезпечує: - Вимірювання величин зазорів під датчиками величин зазорів з погрішністю, яка не -3 -4 перевищує 10 -10 величини вимірюваного зазору і отримання асимптотично незміщених оцінок вимірюваних зазорів. - Формування масивів величин опорних зазорів для установки рухомого вузла напрямної в незміщене положення відносно площині стабілізації. - Формування сигналів управління на пари силових магнітних відштовхувачів 27-34 в процесі настроювання пристрою стабілізації положення рухомого вузла напрямної. В склад блоку стабілізації положення рухомого вузла лінійної напрямної входять вимірювачі 56 величин зазорів (Гриневич Б.Ф., Измерительные компенсационно-мостовые устройства на емкостных датчиках, Киев: Наукова Думка, 1987) по сигналах датчиків 23 і 24 блоків 19, 20, 21, 22 датчиків, які забезпечують вимірювання величин зазорів з погрішністю, що не перевищує 10 3 -4 -10 величини вимірюваного зазору. Обчислювач 57, який забезпечує: - Прийом і перетворення в цифровий код вихідних напруг вимірювачів 56 величин зазорів і обчислення асимптотично незміщених оцінок величин вимірюваних зазорів. - Формування сигналів управління на силові магнітні відштовхувачі 27-34 несучої опори 7 (Фіг. 3) на постійних магнітах в процесі настроювання пристрою стабілізації положення рухомого вузла 2 напрямної - Управління переміщенням рухомого вузла 2 напрямної з установленим кроком мікропереміщення m. - Вимірювання величини поточного переміщення рухомого вузла 2 напрямної. - Формування масиву величин опорних зазорів і видачу їх в схему управління положенням рухомого вузла 2 напрямної. - Формування сигналів управління на пари 27 і 31, 28 і 32, 29 і 33, 30 і 34 силових магнітних відштовхувачів несучої опори 7 в процесі стабілізації положення рухомого вузла відносно площині стабілізації. Операційні підсилювачі 58 забезпечують формування сигналів управління на пари силових магнітних відштовхувачів 27-34 несущої опори 7 в процесі підготовки пристрою стабілізації до роботи. Перемикачі 59 "більше - вимк. - менше" служать для зміни полярності сигналів управління на входи операційних підсилювачів 55. В положенні перемикача "більше" при надходження сигналу управління на пару силових магнітних відштовхувачів рухомий вузол піднімається над верхньою граню основи напрямної, а в положенні менше - понижується. В положенні вимк. операційні підсилювачі 58 відключаються від входів диференційних підсилювачів 60. Диференційні підсилювачі 60 змінюють піднімальну силу силових магнітних відштовхувачів в залежності від знака і величини сигналу неузгодженості на їх входах, які визначаються напрямком і величиною відхилення поточних величин зазорів від відповідних величин опорних зазорів. Перемикачі 61 "робота - вимк." в положенні робота підключають напруги опорних зазорів з виходів цифрового блоку 57 і напруги з виходів вимірювачів величин зазорів під другими датчиками 24 блоків 19, 20, 21, 22 датчиків (напруги з виходів вимірювачів 56 величин зазорів надходять через обчислювач 57 (Фіг. 5) до входів диференційних підсилювачів 60. Для розширення діапазону навантажень, які сприймаються лінійною напрямною на постійних магнітах без зміщення рухомого вузла, на рухомому вузлі можуть установлюватись групи паралельно підключених силових магнітних відштовхувачів. Причому, перші датчики 23 і другі датчики 24 блоків датчиків 19, 20, 21 22 з'єднані з входами вимірювачів 56 величин зазорів, виходи вимірювачів 56 величин зазорів з'єднані з входами обчислювача 57, вхід штовхача 14 прямого ходу з'єднаний з виходом пристрою 18 управління штовхачами, а його вихід з'єднаний з входом пристрою 18 управління штовхачами, вхід штовхача 15 зворотного ходу з'єднаний з виходом пристрою 18 управління штовхачами, а його вихід з'єднаний з входом пристрою 18 управління штовхачами, вихід пристрою 18 управління штовхачами з'єднаний з входом обчислювача 57, а його вихід з'єднаний з входом пристрою 18 управління штовхачами, входи операційних підсилювачів 58 з'єднані з виходами обчислювача 57, а їх виходи через перемикач 59 "більше - вимк. - менше" з'єднані з входами відповідних диференційних підсилювачів 60, входи диференційних підсилювачів 60 через перемикач 61 "робота - вимк." з'єднані з виходами обчислювача 57, а їх виходи з'єднані з п'єзоелектричними двигунами 44 силових магнітних відштовхувачів 27, 28, 29, 30, 31, 32, 33, 34 несучої двосторонньої плоскої опори 7 на постійних магнітах. 6 UA 103948 C2 5 10 15 20 25 30 35 40 45 50 Робота пристрою стабілізації положення рухомого вузла лінійної напрямної на постійних магнітах розглядається в припущенні, що методом пробного скла основи датчиків величин зазорів установлені в одну площина, а в початковому положенні рухомого вузла 2 шляхом установки розрахункових величин зазорів під першими датчиками 23 блоків 19-22 датчиків йому задане положення, яке приймається як незбурене положення відносно площині стабілізації (базової площині). Величини цих зазорів приймаються як опорні зазори Z19 1 Z19 1 , 1on 1 21 21 22 22 20 20 Z1on 1 Z1 1 , Z1on 1 Z1 1 , Z1on 1 Z1 1 . Робота пристрою включає наступні основні етапи. 1. Формування масиву опорних зазорів. Рухомий вузол 2 з похідного положення переміщується на дискрету стабілізації l. Для переміщення рухомого вузла з похідного положення на дискрету стабілізації в пристрої 18 управління переміщенням установлюється величина кроку мікропереміщення рухомого вузла штовхачем прямого ходу і пристрій переводиться в режим безперервного переміщення. В цифровий блок 57 уводиться величина дискрети стабілізації l і виконується пуск підпрограми Переміщення рухомого вузла. Рухомий вузол 2 з похідного положення переміщується з установленою величиною кроку мікропереміщення. На кожному j-му кроці мікропереміщення рухомого вузла з пристрою 18 управління переміщенням в обчислювач надходять: - сигнал початку j-го кроку мікропереміщення рухомого вузла; - сигнал кінця j-го кроку мікропереміщення рухомого вузла; - сигнал з виходу вимірювача величини зазору по датчику 17 величини зазору п'єзоелектричного двигуна 13. У відповідності з алгоритмом підпрограми Переміщення рухомого вузла по сигналах початку і кінця кроку мікропереміщення в обчислювачі обчислюється величина j-го кроку мікропереміщення: m(j)=Zk(j)-Zn(j), де Zk і Zn - кінцева і початкова величина зазору під датчиком 17 величини кроку мікропереміщення. Обчислюється величина l(у) переміщення рухомого вузла 2 за j кроків мікропереміщень на дискреті стабілізації: l(j)=l(j-1)-m(j). Обчислюється різниця між величиною декрети стабілізації l і величиною поточного переміщення рухомого вузла: Vl=l-l(j). Перевіряється виконання нерівності 0≤Vl≤m. Якщо ця нерівність не виконується, виконується наступне переміщення рухомого вузла 2 на крок m. В противному випадку обчислювач 57 видає в пристрій 18 управління переміщенням сигнал зупину. В пристрої 18 управління переміщенням установлюється величина наступного кроку мікропереміщення m(j+1)=Vl і в режимі крокового переміщення рухомий вузол переміщується на Vl. Рухомий вузол буде установлений на другу дискрету стабілізації. 2. На другій дискреті стабілізації під другими датчиками 24 блоків датчиків установлюють величини зазорів 21 22 20 Z19 2l Z19 1 , Z 20 2l Z1on 1 , Z 21 2l Z1on 1 , Z 22 2l Z1on 1 . 2 1on 2 2 2 Рухомий вузол займе незбурене положення відносно площині стабілізації. Вимірюються величини зазорів під першими датчиками 23 блоків датчиків і запам'ятовуються як опорні Z19 2l , Z 20 2l , Z 21 2l , Z 22 2l для установки рухомого вузла в незбурене положення на третій 2 2 2 2 дискреті стабілізації. Виконується пуск підпрограми Запис опорних зазорів. В результаті в масив опорних зазорів будуть записані опорні зазори для стабілізації положення рухомого вузла на третій дискреті стабілізації. 3.Пункти 1 і 2 послідовно виконуються на дискретах 3l, 4l,…, Jl до переміщення рухомого вузла на відстань Jl=L. В пам'яті цифрового блоку будуть сформовані чотири масиви опорних зазорів Z19 l , Z19 2l , Z19 3l , … Z19 Jl ; 1on 1on 1on 1on 20 20 20 20 Z1on l , Z1on 2l , Z1on 3l , … Z1on Jl ; 21 21 21 21 Z1on l , Z1on 2l , Z1on 3l , … Z1on Jl ; 55 22 22 22 22 Z1on l , Z1on 2l , Z1on 3l , … Z1on Jl . 7 UA 103948 C2 5 10 15 20 25 30 35 40 45 50 4. Стабілізація положення рухомого вузла 2 лінійної напрямної на постійних магнітах відносно площині стабілізації. Пристрій стабілізації положення рухомого вузла 2 працює наступним чином. Рухомий вузол установлюється в похідне для переміщення положення. Перемикачі 59 "більше - вимк. - менше" установлюються в положення вимк. Виходи операційних підсилювачів 58 (Фіг. 5) відключаються від входів диференційних підсилювачів 60. Перемикач 61 "робота - вимк." установлюється в положення робота. Вимірювачі 56 величин зазорів під першими датчиками 23 блоків 19-22 датчиків підключаються (через обчислювач 57) до других входів операційних підсилювачів 60, а виходи напруг опорних зазорів обчислювача 57 підключаються до перших входів цих підсилювачів 60. В обчислювач 57 уводиться величина кроку m мікропереміщення і величина L переміщення рухомого вузла. Виконується пуск підпрограми Стабілізація. У відповідності з 20 21 22 алгоритмом роботи підпрограми коди величин опорних зазорів Z19 l , Z1on l , Z1on l , Z1on l 1on вираховуються з масиву опорних зазорів, перетворюються в напруги опорних зазорів і через вимикач 61 надходять на перші входи диференційних підсилювачів 60. На другі входи диференційних підсилювачів 60 надходять напруги сигналів вимірювачів 56 величин по сигналах перших датчиків 23 блоків датчиків. Якщо зазори під першими датчиками 23 не рівні відповідним опорним зазорам, на виходах диференційних підсилювачів 60 виникають різниці потенціалів, знаки і величини яких визначаються напрямком і величиною відхилення величини зазору під відповідним першим датчиком 23 від величини опорного зазору. В результаті силові магнітні відштовхувачі в похідному для переміщення положенні вузла 2 установлять його в незбурене положення. Пристрій 18 управління переміщенням рухомого вузла 2 переводиться в режим безперервного переміщення рухомого вузла 2 з установленим кроком переміщення. На кожному j-му кроці мікропереміщення з пристрою 18 управління переміщенням в обчислювач надходять сигнали Un і Uk початку і кінця кроку мікропереміщення. Обчислюється величина j-го кроку m(j) і величина результуючого переміщення l(j) рухомого вузла за у кроків мікропереміщень. Обчислюється різниця: Vl=l-l(j). Якщо Vl≥m рухомий вузол 2 переміщується на наступний крок мікропереміщення. Якщо на jму кроці 0≤Vl≤m визначається номер наступної дискрети стабілізації. З масиву величин опорних 20 21 22 зазорів злічуються коди величин опорних зазорів Z19 2l , Z1on 2l , Z1on 2l , Z1on 2l для 1on наступної дискрети стабілізації, перетворюються в напруги опорних зазорів і надходять на перші входи диференційних підсилювачів 60. Рухомий вузол переміщується по третій дискреті 21 22 20 стабілізації. Поточні величини зазорів Z19 t , Z1 t , Z1 t , Z1 t під першими датчиками 23 1 блоків 19, 20, 21, 22 датчиків через обчислювач 57 надходять на другі входи відповідних 21 22 20 підсилювачів 60. При відхиленні поточних величин зазорів Z19 t , Z1 t , Z1 t , Z1 t від 1 відповідних величин опорних зазорів на виходах диференційних підсилювачів 60 виникають різниці потенціалів, пропорційні величинам цих відхилень, на пари силових магнітних відштовхувачів 27 і 31, 28 і 32, 29 і 33, 30 і 34. Силові магнітні відштовхувачі в кожній парі відштовхувачів до диференційних підсилювачів 60 підключені в протифазі. В результаті в кожній парі силових магнітних відштовхувачів величина зазору між магнітом 39 відштовхувача і магнітом 40 грані основи напрямної в одному з них зменшиться, а сила відштовхування збільшиться, Величина зазору під магнітом 39 другого силового магнітного відштовхувача цієї пари збільшиться, а сила відштовхування зменшиться. Під дією різниць сил відштовхування в парах силових магнітних відштовхувачів рухомий вузол 2 займе незміщене положення, а під першими датчиками 23 блоків датчиків будуть утримуватися величини зазорів, рівні опорним зазорам для цієї дискрети стабілізації. Наведені вище дії виконуються на кожній дискреті стабілізації до переміщення рухомого вузла на задану відстань L. Точність стабілізації визначається неплощинністю граней основи напрямної, величиною дискрети стабілізації, точністю вимірювання величини зазорів і може не перевищувати 0,05 мкм. ФОРМУЛА ВИНАХОДУ 55 Лінійна напрямна на постійних магнітах, яка включає основу, рухомий вузол, встановлений з можливістю переміщення по основі, та блок стабілізації положення рухомого вузла, яка відрізняється тим, що на верхній і нижній стінках рухомого вузла попарно один проти одного по вертикальних площинах установлені по чотири силових магнітних відштовхувачі, кожен з яких включає встановлений у втулку магніт, встановлений в ізолятор п'єзоелектричний двигун 8 UA 103948 C2 5 10 15 20 25 30 35 та регулювальний гвинт, причому між магнітом і п'єзоелектричним двигуном встановлені екран та ізолятор, а між регулювальним гвинтом і п'єзоелектричним двигуном встановлений ізолятор, при цьому на верхній стінці рухомого вузла встановлені чотири блоки датчиків величин зазорів, в кожному з яких установлені по два датчики величини зазору, причому центри основ датчиків в кожному блоці лежать на прямих, паралельних напрямку переміщення рухомого вузла, причому кожний силовий магнітний відштовхувач розміщений поруч з тим блоком датчиків величин зазору, з датчиками якого він зв'язаний електрично, при цьому основа виконана у вигляді балки, на верхній і нижній гранях якої по сліду переміщення силових магнітних відштовхувачів установлені магніти, які від балки відділені П-подібними екранами, установленими в П-подібні керамічні короби, причому на верхній грані балки по сліду переміщення датчиків величин зазорів установлені металеві штаби, які відділені від балки П-подібними екранами і керамічними пластинами, а між металевими штабами установлена металева вставка для прикріплення штовхачів крокового п'єзоелектричного двигуна, причому верхня і нижня стінки рухомого вузла з верхньою і нижньою гранями основи утворюють несучу двосторонню плоску опору на постійних магнітах, при цьому на бокових стінках рухомого вузла по прямих, які паралельні напрямку переміщення рухомого вузла, встановлені силові магнітні відштовхувачі, кожен з яких включає магніт, встановлений у втулку, та регулювальний гвинт, причому між магнітами і регулювальними гвинтами встановлені екрани, причому на бокових гранях балки по сліду переміщення силових магнітних відштовхувачів установлені магніти, які також від балки відділені П-подібними екранами, встановленими в П-подібні керамічні короби, причому бокові стінки рухомого вузла з боковими гранями основи утворюють замикаючу двосторонню плоску опору на постійних магнітах, при цьому блок стабілізації положення рухомого вузла включає згадані блоки датчиків величин зазорів, вимірювачі величин зазорів, обчислювач, кроковий п'єзоелектричний двигун, який включає штовхач прямого ходу та штовхач зворотного ходу, пристрій управління штовхачами, операційні підсилювачі, перемикачі, диференційні підсилювачі та силові магнітні відштовхувачі несучої двосторонньої плоскої опори на постійних магнітах, причому перші датчики і другі датчики блоків датчиків величин зазору з'єднані з входами вимірювачів величин зазорів, виходи яких з'єднані з входами обчислювача, вхід штовхача прямого ходу з'єднаний з виходом пристрою управління штовхачами, а його вихід з'єднаний з входом пристрою управління штовхачами, вхід штовхача зворотного ходу з'єднаний з виходом пристрою управління штовхачами, а його вихід з'єднаний з входом пристрою управління штовхачами, також вихід пристрою управління штовхачами з'єднаний з входом обчислювача, вихід якого з'єднаний з входом пристрою управління штовхачами, входи операційних підсилювачів з'єднані з виходами обчислювача, а їх виходи через перемикач "більше - вимк. менше" з'єднані з входами відповідних диференційних підсилювачів, входи диференційних підсилювачів через перемикач "робота - вимк." з'єднані з виходами обчислювача, а їх виходи з'єднані з п'єзоелектричними двигунами силових магнітних відштовхувачів несучої двосторонньої плоскої опори на постійних магнітах. 9 UA 103948 C2 10 UA 103948 C2 11 UA 103948 C2 Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 12
ДивитисяДодаткова інформація
Автори англійськоюHrytsenko Volodymyr Illich, Tarasov Viktor Oleksiiovych, Zinenko Volodymyr Mykolaiovych
Автори російськоюГриценко Владимир Ильич, Тарасов Виктор Алексеевич, Зиненко Владимир Николаевич
МПК / Мітки
МПК: F16C 32/04
Мітки: напрямна, лінійна, постійних, магнітах
Код посилання
<a href="https://ua.patents.su/14-103948-linijjna-napryamna-na-postijjnikh-magnitakh.html" target="_blank" rel="follow" title="База патентів України">Лінійна напрямна на постійних магнітах</a>
Спосіб стабілізації радіального положення осі обертання вала радіальної шпиндельної опори на постійних магнітах
Номер патенту: 102029
Опубліковано: 27.05.2013
Автори: Зіненко Володимир Миколайович, Гриценко Володимир Ілліч, Тарасов Віктор Олексійович
МПК: B23B 19/00, F16C 32/06
Мітки: шпиндельної, постійних, стабілізації, спосіб, магнітах, положення, радіального, обертання, осі, опори, вала, радіальної
Формула / Реферат:
Спосіб стабілізації радіального положення осі обертання вала радіальної шпиндельної опори на постійних магнітах, який включає вимірювання величин зазорів між валом радіальної шпиндельної опори на постійних магнітах і основами датчиків величин зазорів, визначення незміщеного положення осі обертання вала шпиндельної опори на постійних магнітах, формування масивів опорних величин зазорів, вироблення сигналів неузгодження на силові магнітні...
Пристрій стабілізації положення рухомого вузла лінійної напрямної на постійних магнітах
Номер патенту: 77946
Опубліковано: 11.03.2013
Автори: Зіненко Володимир Миколайович, Гриценко Володимир Ілліч, Тарасов Віктор Олексійович
МПК: F16C 32/06
Мітки: стабілізації, вузла, магнітах, рухомого, пристрій, напрямної, положення, постійних, лінійної
Формула / Реферат:
Пристрій стабілізації положення рухомого вузла лінійної напрямної на постійних магнітах, що включає основу лінійної напрямної, рухомий вузол лінійної напрямної, блок стабілізації положення рухомого вузла лінійної напрямної на постійних магнітах, який відрізняється тим, що на верхній і нижній стінках рухомого вузла попарно один проти одного по вертикальних осях симетрії установлені по чотири силових магнітних відштовхувачі, кожний силовий...
Шпиндельна опора на постійних магнітах
Номер патенту: 72699
Опубліковано: 27.08.2012
Автори: Тарасов Віктор Олексійович, Зіненко Володимир Миколайович, Гриценко Володимир Ілліч
МПК: F16C 32/06
Мітки: постійних, магнітах, опора, шпиндельна
Формула / Реферат:
1. Шпиндельна опора на постійних магнітах, яка включає датчики положення вала опори, силові магнітні відштовхувачі, пристрій автоматичного управління положенням вала опори, яка відрізняється тим, що вал шпиндельної опори виконаний складеним і включає вихідний вал, несучий вал і хвостовик, по краях несучого вала в екранах установлені магніти вала у вигляді порожнистого циліндра з полюсами на внутрішній і зовнішній бокових поверхнях, в...
Шпиндельна опора на постійних магнітах
Номер патенту: 101907
Опубліковано: 13.05.2013
Автори: Тарасов Віктор Олексійович, Гриценко Володимир Ілліч, Зіненко Володимир Миколайович
МПК: F16C 32/06
Мітки: шпиндельна, опора, постійних, магнітах
Формула / Реферат:
1. Шпиндельна опора на постійних магнітах, яка включає датчики положення вала опори, силові магнітні відштовхувачі, пристрій автоматичного управління положенням вала опори, яка відрізняється тим, що вал шпиндельної опори виконаний складовим і включає вихідний вал, несучий вал і хвостовик, по краях несучого вала в екранах установлені магніти вала у вигляді порожнистих циліндрів з полюсами на внутрішній і зовнішній бокових поверхнях, у...
Підп’ятник на постійних магнітах
Номер патенту: 77947
Опубліковано: 11.03.2013
Автори: Гриценко Володимир Ілліч, Тарасов Віктор Олексійович, Зіненко Володимир Миколайович
МПК: F16C 32/04, F16C 32/06
Мітки: постійних, підп'ятник, магнітах
Формула / Реферат:
1. Підп'ятник на постійних магнітах, що містить магнітний силовий підвіс, датчик положення вала, пристрій автоматичного управління осьовим положенням вала, який відрізняється тим, що магнітний силовий підвіс містить по чотири силових магнітних відштовхувачі в кожному лівому та правому підп'ятниках, п'яту, яка установлена між правим та лівим підп'ятниками і складається з диска, екранів і установленого між екранами магніту п'яти, причому диск...
Попередній патент: Клапанний вузол і газомір, що включає в себе вказаний клапанний вузол
Наступний патент: Система кріогенного забезпечення на базі кріорефрижераторів замкнутого циклу великогабаритного багатотоннажного кріомагнітного комплексу
Випадковий патент: Спосіб лікування акантолітичної пузирчатки