Зернозбиральний комбайн з допоміжною системою машиніста та спосіб експлуатації комбайна
Номер патенту: 111576
Опубліковано: 25.05.2016
Автори: Хайтманн Крістоф, Вількен Андреас, Вьокінг Хеннер, Буссманн Крістоф, Неу Себастіан, Баумгартен Йоахім
Формула / Реферат
1. Зернозбиральний комбайн з допоміжною системою машиніста, причому зернозбиральний комбайн має велику кількість робочих органів, що обробляють зібрану масу, яка проходить через зернозбиральний комбайн, та допоміжну систему машиніста, що складається щонайменше з одного пристрою для обробки даних та управління та дисплею, а пристрій для обробки даних та управління обробляє отримані від внутрішніх сенсорних систем дані, дані, що записані в пристрої для обробки даних та управління, та зовнішні дані, який відрізняється тим, що допоміжна система машиніста (35) містить технологічні стратегії (42, 43), які можна вибирати, причому критеріями вибору (45) технологічної стратегії (42, 43) є якість зібраної маси, необхідна для певного призначення зібраної маси (5, 11), та/або критерії оптимізації (51) робочих органів (20).
2. Зернозбиральний комбайн з допоміжною системою машиніста за п. 1, який відрізняється тим, що критеріями вибору (45) є ″харчові культури″ (45а), ″посівний матеріал″ (45b), ″кормові культури″ (45с) та/або ″технічні культури″ (45d).
3. Зернозбиральний комбайн з допоміжною системою машиніста за пп. 1 і 2, який відрізняється тим, що кожна технологічна стратегія (42) враховує один або декілька параметрів зібраної маси (47) ″бите зерно″ (47а), ″чистота″ (47b) та ″намолот″ (47с) таким чином, що при активації критерію вибору ″харчові культури″ (45а) управління відбувається за оптимальним значенням з мінімальною кількістю ″битого зерна″ (47а), максимальним ″намолотом″ (47с) та максимальною ″чистотою″ (47b), що при активації критерію вибору ″посівний матеріал″(45b) управління відбувається за мінімальною кількістю ″битого зерна″ (47а), а ″чистота″ (47b) та ″намолот″ (47с) мають другорядний пріоритет, що при активації критерію вибору ″кормові культури″ (45с) управління відбувається за максимальним ″намолотом″ (47с), а ″чистота″ (47b) та ″бите зерно″ (47а) мають другорядний пріоритет, що при активації критерію вибору ″технічні культури″ (45d) жодному з параметрів зібраної маси ″бите зерно″(47а), ″чистота″(47b) та ″намолот″ (47с) пріоритет не надається.
4. Зернозбиральний комбайн з допоміжною системою машиніста за п. 3, який відрізняється тим, що закладені в характеристиках або алгоритмах (46) залежності параметрів зібраної маси (47) критерію вибору (45a-45d) записані в пристрої управління і регулювання (23) з можливістю редагування.
5. Зернозбиральний комбайн з допоміжною системою машиніста за одним із пп. 1-4, який відрізняється тим, що технологічні стратегії (42, 43) можуть мати додаткові або альтернативні критерії оптимізації (51) ″Максимальну якість намолоту″ (51а) та/або ″Ефективність використання палива″ (51b), та/або ″Максимальну витрату″ (51с), та/або ″Збалансований режим″ (51d).
6. Зернозбиральний комбайн з допоміжною системою машиніста за одним із пп. 3-5, який відрізняється тим, що критерії вибору (45) та/або критерії оптимізації (51) виводяться для оператора (24) комбайна (2) на дисплей (22) з можливістю вибору і вибір відбувається за допомогою функції сенсорного екрана (41) або за допомогою клавіш (39, 40), а встановлена за допомогою активованого критерію вибору (45) та/або критерію оптимізації (51) технологічна стратегія (42, 43) реалізується через закладені в пристроях управління і регулювання (23) характеристики або алгоритми (46, 52).
7. Зернозбиральний комбайн з допоміжною системою машиніста за п. 6, який відрізняється тим, що режим роботи робочих органів (20) управляється через автоматичні регулятори (50), і автоматичні регулятори (50) мають регулятор швидкості руху (50а) та/або молотильний автомат (50b), та/або сепараційний автомат (50с), та/або очисний автомат (50d).
8. Зернозбиральний комбайн з допоміжною системою машиніста за п. 7, який відрізняється тим, що в полі введення (55) дисплея (22) виконується загальна команда, що і який вплив має вибрана за допомогою критерію вибору (45) та критерію оптимізації (51) технологічна стратегія (42, 43) на принцип дії автоматичних регуляторів (50) та/або параметри зібраної маси (47).
9. Зернозбиральний комбайн з допоміжною системою машиніста за пп. 7 або 8, який відрізняється тим, що режим роботи автоматичних регуляторів (50) можна редагувати і можливість редагування реалізується через дисплей (22), а один або декілька автоматичних регуляторів (50) можуть включатися, виключатися або редагуватися автоматично або оператором (24) за допомогою пристрою управління і регулювання (23).
10. Зернозбиральний комбайн з допоміжною системою машиніста за п. 9, який відрізняється тим, що оптимізовані в пристрої управління і регулювання (23) пропозиції припасування для одного або декількох автоматичних регуляторів (50) отримуються й відображаються для оператора (24) в діалоговому вікні дисплея (22).
11. Спосіб експлуатації зернозбирального комбайна з допоміжною системою машиніста за одним із пп. 1-9, який відрізняється тим, що спосіб передбачає наступні кроки:
а) на першому кроці меню оператору (23) сільськогосподарської машини (1, 2) пропонується вибрати технологічну стратегію (42, 43), причому технологічна стратегія (42, 43) поперемінно або одночасно передбачає активацію критерію вибору (45), що визначає якість зібраної маси (5, 11), та/або критерію оптимізації (51) режиму роботи робочих органів (20);
б) в залежності від вибраної технологічної стратегії (42, 43) в наступному кроці меню оператору (24) пропонується вибрати критерій вибору (45a-d) та/або активувати автоматичні регулятори (50a-d) і відповідний критерій оптимізації (51);
в) в залежності від активованої оператором (24) сільськогосподарської машини (1, 2) технологічної стратегії (42, 43) допоміжна система машиніста (35) передає оптимізовані робочі параметри (34) щонайменше на один робочий орган (20) та впливає на настройку оптимізованого параметра (34) щонайменше на одному робочому органі (20).
Текст
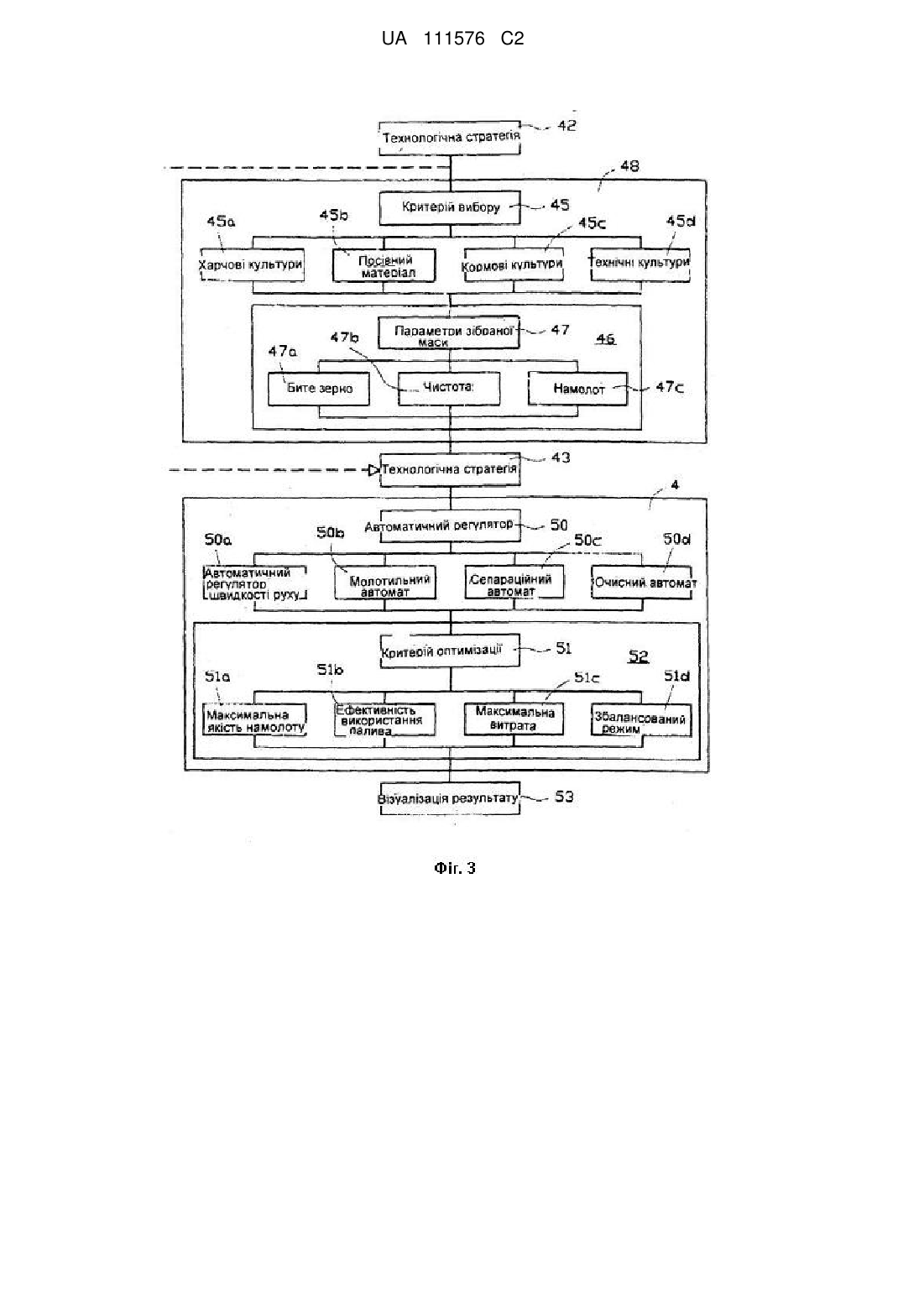
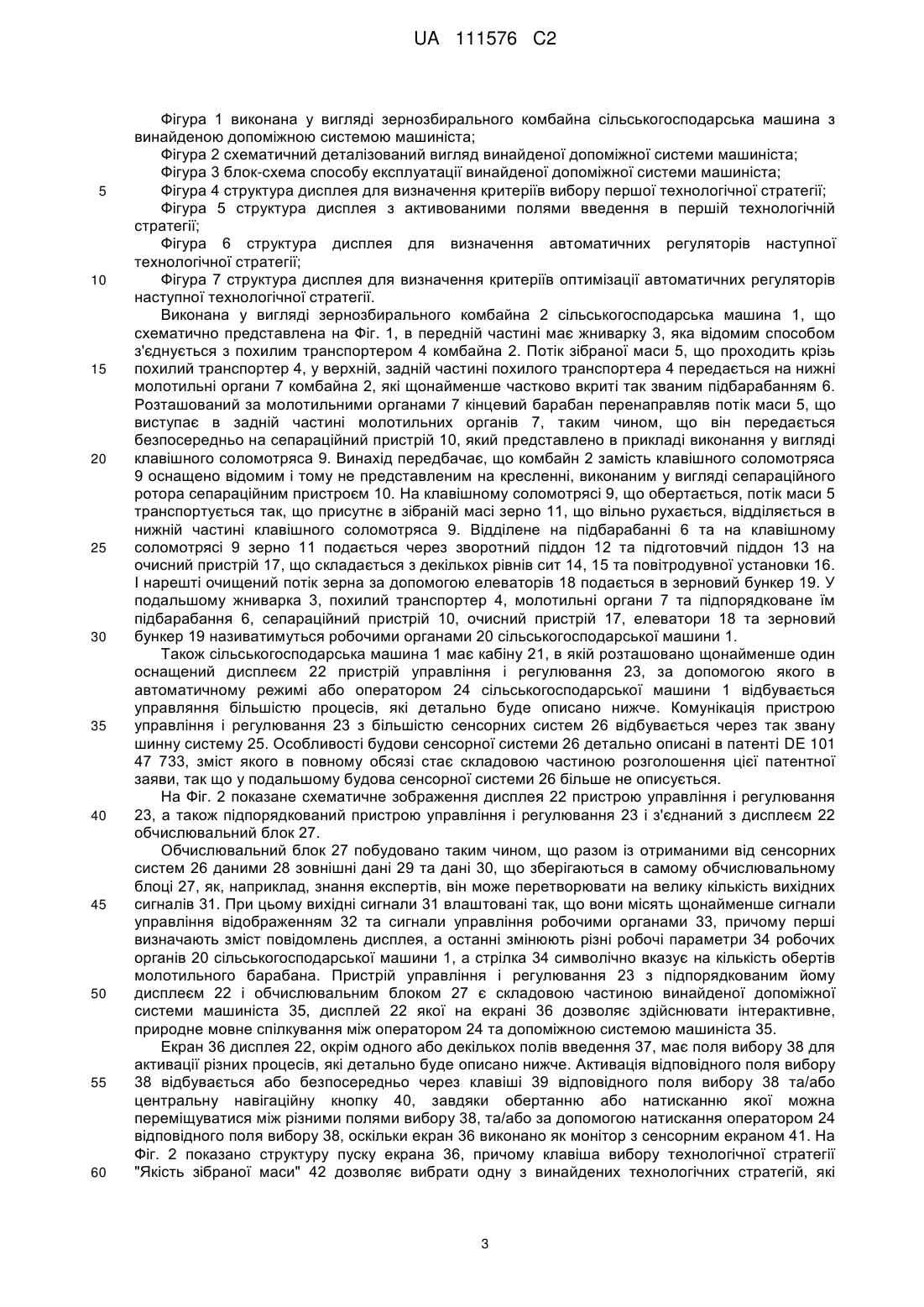
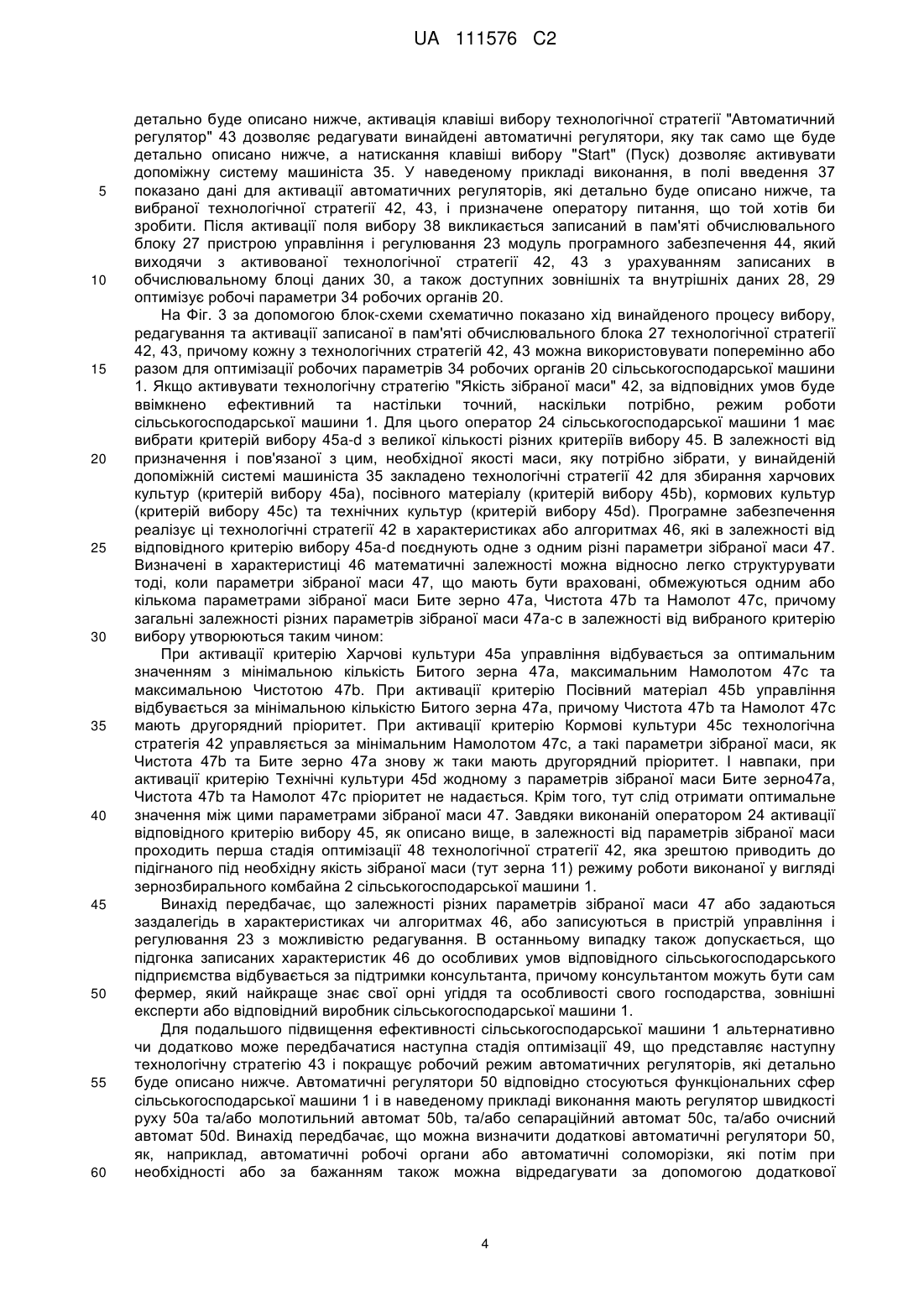
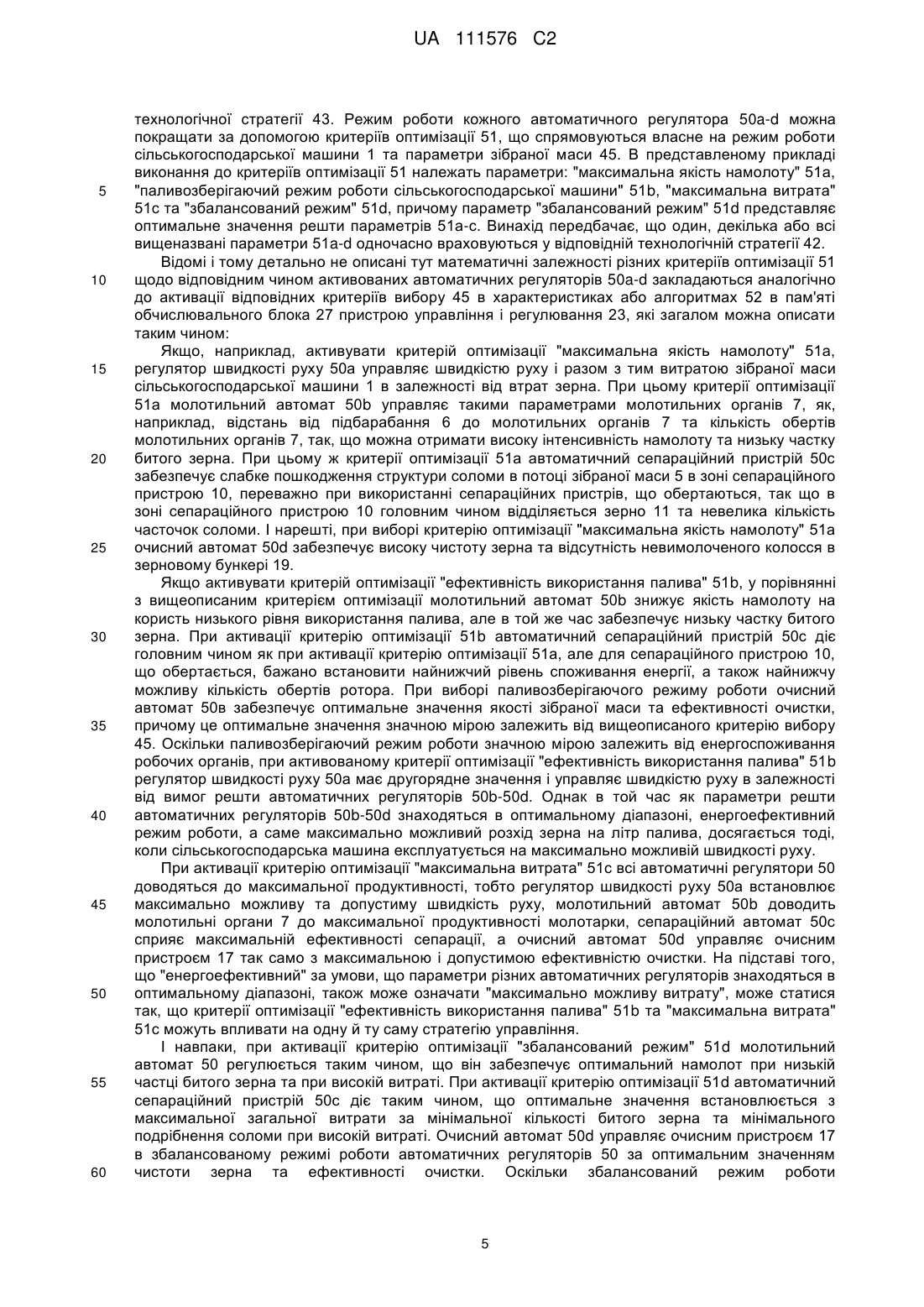
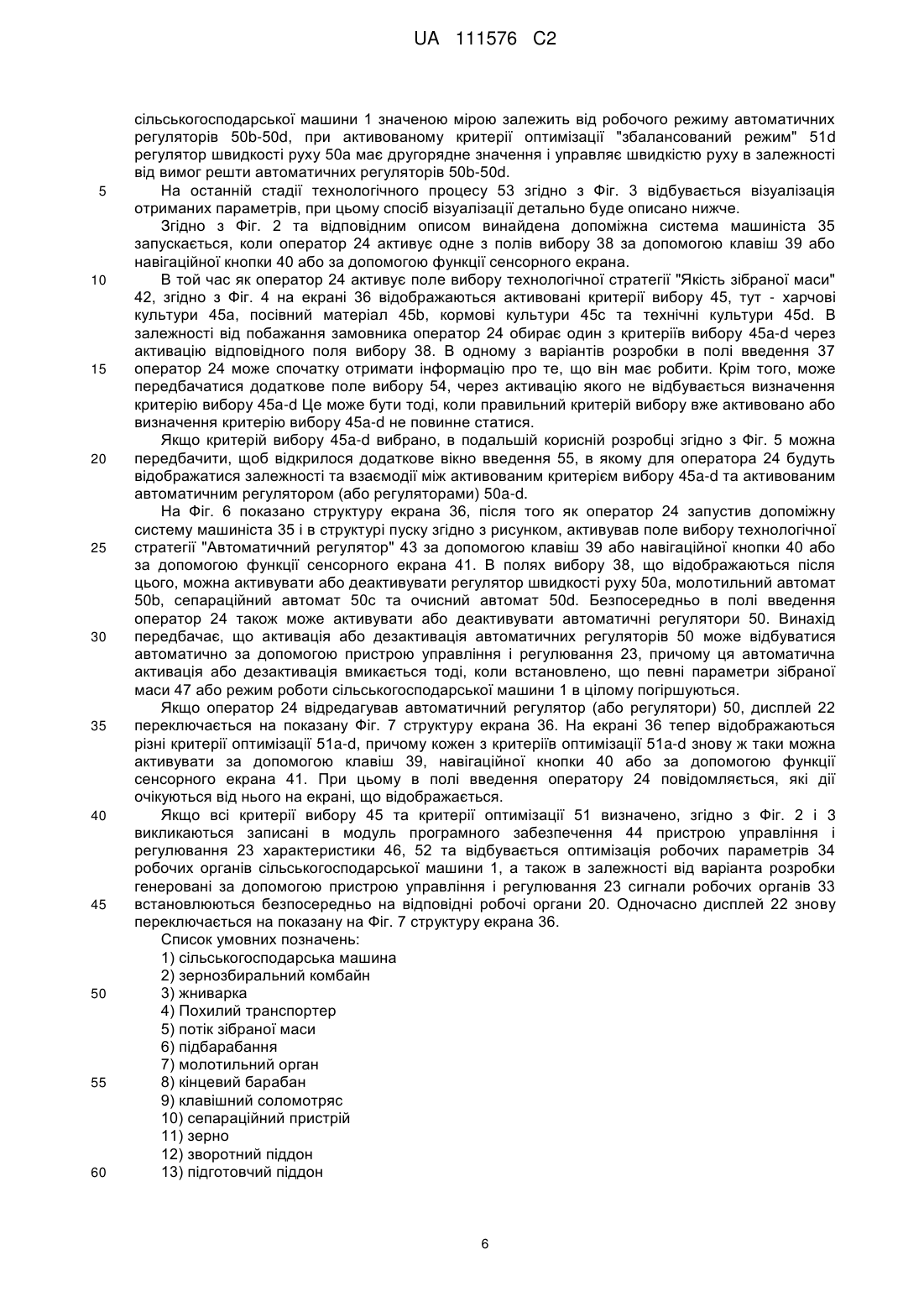
Реферат: Винахід стосується допоміжної системи машиніста (35) для зернозбирального комбайна (1, 2), причому зернозбиральний комбайн (2) має велику кількість робочих органів (20), а допоміжна система машиніста (35) складається щонайменше з одного пристрою для обробки даних та управління (23) та дисплея (22). Пристрій для обробки даних та управління (23) обробляє отримані від внутрішніх сенсорних систем (26) дані (28), дані (29), що записані в пристрої для обробки даних та управління (23), та зовнішні дані (30), а допоміжна система машиніста (35) містить технологічні стратегії (42, 43), які можна вибирати, причому критеріями вибору (45) технологічної стратегії (42, 43) є якість зібраної маси, необхідна для певного призначення зібраної маси (5, 11), та/або критерії оптимізації (51) робочих органів (20). UA 111576 C2 (12) UA 111576 C2 UA 111576 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід стосується допоміжної системи машиніста для сільськогосподарських машин згідно з обмежувальною частиною пункту 1 формули винаходу. З патенту DE 101 47 733 відомо про допоміжну систему машиніста, що надає підтримку оператору сільськогосподарської машини при оптимізації робочих параметрів робочих органів. Окрім комплексного дисплейного блока допоміжна система машиніста містить обчислювальний блок для обробки сигналів різноманітних датчиків. Виконана у вигляді зернозбирального комбайна сільськогосподарська машина має велику кількість робочих органів, а саме: жатку, молотарку, пристрій сепарації зерна та соломи і щонайменше один очисний пристрій, що з'єднується з великою кількістю чутливих елементів, які разом з робочими параметрами робочих органів також можуть фіксувати параметри ефективності сільськогосподарської машини, як, наприклад, втрати зерна, якість зерна та кількість полови. Отримані з чутливих елементів дані передаються на центральний обчислювальний блок, який потім виводить візуальні дані на дисплей. Окрім робочих параметрів сільськогосподарської машини до візуальних даних належать кількість обертів молотильного барабана, кількість обертів очисної повітродувної установки, витрата зібраної маси, ширина підбарабання, а також параметри ефективності, як, наприклад, втрати зерна в пристрої очищення та в пристрої сепарації зерна і соломи. Отже для оптимізації різних робочих параметрів в патенті DE 101 47 733 пропонується методика, за якої оператор сільськогосподарської машини на першій стадії технологічного процесу веде її по ниві, на якій збирається врожай, із швидкістю руху, що налаштована на очікувану витрату зібраної маси, так щоб комбайн за певний проміжок часу завантажувався майже однаковим об'ємом зібраної маси. Спочатку оператор має зачекати, доки комбайн досягне так званого усталеного режиму, при якому можна отримати майже постійний, гарний або поганий результат роботи. Цей результат роботи записується і виводиться на дисплей оператора. Якщо результат роботи незадовільний, оператор комбайна декілька разів змінює успішний робочий параметр робочого органу і чекає усталеного режиму роботи комбайна зі зміненим параметром. Всі результати роботи записуються, так що оператор зрештою може вирішити, при якому конкретному значенні робочого параметра було отримано найкращій результат. Потім це конкретне значення встановлюється для відповідного робочого органу, так що нарешті сільськогосподарську машину буде настроєно на покращений результат роботи. Проте недолік такої методики полягає у тому, що знадобиться відносно великий проміжок часу, доки різні робочі параметри комбайна функціонуватимуть в оптимальному діапазоні, оскільки для кожного робочого параметра необхідно провести процедуру настройки. Крім того, швидка і доцільна оптимізація за такої структурованої методики настройки значною мірою залежить від рівня підготовки оператора сільськогосподарської машини, оскільки різні робочі параметри інколи впливають одне на одного через дуже складні взаємодії. До того ж, за такої структурованої методики оптимізації майже неможливо виконати вимоги замовника щодо зібраної маси. Тому задача винаходу полягає в тому, щоб уникнути описаних недоліків і, зокрема, запропонувати допоміжну систему машиніста для оптимізації ефективності сільськогосподарської машини, яка у найкоротші строки може забезпечити оптимальний та орієнтований на побажання замовника режим роботи сільськогосподарської машини. Ця задача вирішується, згідно з винаходом, за допомогою характерних ознак незалежних пунктів 1 та 10 формули винаходу. У той час як виконана у вигляді зернозбирального комбайна сільськогосподарська машина має допоміжну систему машиніста, яка дозволяє вибирати технологічні стратегії, причому критерієм вибору технологічної стратегії є якість зібраної маси, що необхідна для певного призначення зібраної маси, та/або критерії оптимізації робочих органів, гарантується, що у найкоротші строки буде отримано оптимальний та орієнтований на побажання замовника режим роботи сільськогосподарської машини. В корисній розробці винаходу є критерій вибору, який можна редагувати: "харчові культури", "посівний матеріал", "кормові культури" та/або "технічні культури", так що для зібраної маси майже будь-якого призначення можна отримати налаштований на необхідну якість зібраної маси оптимальний режим роботи сільськогосподарської машини. Математично довершена, гарантуюча необхідну якість зібраної маси технологічна стратегія в подальшій корисній розробці винаходу досягається тоді, коли кожна з цих технологічних стратегій враховує один або декілька параметрів зібраної маси "бите зерно", "чистота" та "намолот" таким чином, - що при активації критерію вибору "харчові культури" управління відбувається за оптимальним значенням з мінімальною кількістю "битого зерна", максимальним "намолотом" та максимальною "чистотою» 1 UA 111576 C2 5 10 15 20 25 30 35 40 45 50 55 - що при активації критерію вибору "посівний матеріал" управління відбувається за мінімальною кількістю "битого зерна", а "чистота" та "намолот" мають другорядний пріоритет - що при активації критерію вибору "кормові культури" управління відбувається за максимальним "намолотом", а "чистота" та "бите зерно" мають другорядний пріоритет - що при активації критерію вибору "технічні культури" жодному з параметрів зібраної маси "бите зерно", "чистота" та "намолот" пріоритет не надається. Особливо гнучку орієнтовану на вимоги замовника допоміжну систему машиніста можна створити тоді, коли закладені в характеристиках або алгоритмах залежності параметрів зібраної маси критерію вибору записані в пристрої управління і регулювання з можливістю редагування. В той час як в подальшій корисній розробці винаходу кожна технологічна стратегія може мати додаткові або альтернативні критерій оптимізації "Максимальну якість намолоту" та/або "Ефективність використання палива", та/або "Максимальну витрату", та/або "Збалансований режим", гарантується, що поряд з параметрами якості, що безпосередньо спрямовані на якість зібраної маси, також враховується режим роботи сільськогосподарської машини при відповідних параметрах якості. В результаті це приводить до того, що сільськогосподарська машина працює не лише найбільш точно, а й найбільш ефективно. Особливо просте та наочне використання допоміжної системи машиніста можливе, якщо критерії вибору та/або критерії оптимізації виводяться для оператора комбайна на дисплей, а вибір відбувається за допомогою функції сенсорного екрана або за допомогою клавіш, а встановлена за допомогою активованого критерію вибору та/або критерію оптимізації технологічна стратегія реалізується через закладені в пристроях управління і регулювання характеристики або алгоритми. Найбільш ефективний вплив на відповідні параметри якості режиму роботи сільськогосподарської машини можливий в подальшій корисній розробці винаходу, якщо режим роботи робочих органів управляється через автоматичні регулятори, а автоматичні регулятори мають щонайменше один регулятор швидкості руху та/або один молотильний автомат, та/або один сепараційний автомат, та/або очисний автомат. Для того щоб оператор сільськогосподарської машини мав чітке розуміння проведеної допоміжною системою машиніста оптимізації, в подальшій корисній розробці винаходу передбачено, щоб в полі введення дисплею виконувалася загальна команда згідно з тою, який вплив має вибрана за допомогою критерію вибору та критерію оптимізації технологічна стратегія на принцип дії автоматичних регуляторів та/або параметрів зібраної маси. Надзвичайно гнучка оптимізація сільськогосподарської машини з винайденою допоміжною системою машиніста можлива в корисній розробці, якщо режим роботи автоматичних регуляторів можна редагувати, можливість редагування реалізується у формі діалогів через дисплей, а один або декілька автоматичних регуляторів можуть включатися, виключатися або редагуватися автоматично або оператором за допомогою пристрою управління і регулювання. Надзвичайно ефективна підтримка оптимізації сільськогосподарської машини в подальшійкорисній розробці винаходу забезпечується тим, що оптимізовані в пристрої управління і регулювання пропозиції припасування для одного або декількох автоматичних регуляторів отримуються й відображаються для оператора в діалоговому вікні дисплею. У той час як винайдений спосіб експлуатації сільськогосподарської машині з винайденою допоміжною системою машиніста передбачає наступні кроки: а) на першому кроці меню оператору сільськогосподарської машини пропонується вибрати технологічну стратегію, причому технологічна стратегія поперемінно або одночасно передбачає активацію критерію вибору, що визначає якість зібраної маси, та/або критерію оптимізації режиму роботи робочих органів. б) в залежності від вибраної технологічної стратегії в наступному кроці меню оператору пропонується вибрати критерій вибору та/або активувати автоматичні регулятори і відповідний критерій оптимізації. в) в залежності від активованої оператором сільськогосподарської машини технологічної стратегії допоміжна система машиніста передає оптимізовані робочі параметри щонайменше на один робочий орган та впливає на настройку оптимізованого робочого параметра щонайменше на одному робочому органі, гарантується, що оператор сільськогосподарської машини за найкоротший проміжок часу може отримати оптимальний та орієнтований на побажання замовника режим роботи сільськогосподарської машини. Подальші корисні розробки є предметом інших підпунктів формули винаходу і описуються нижче за допомогою прикладів виконання, що представлені на декількох фігурах. На них зображені: 2 UA 111576 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фігура 1 виконана у вигляді зернозбирального комбайна сільськогосподарська машина з винайденою допоміжною системою машиніста; Фігура 2 схематичний деталізований вигляд винайденої допоміжної системи машиніста; Фігура 3 блок-схема способу експлуатації винайденої допоміжної системи машиніста; Фігура 4 структура дисплея для визначення критеріїв вибору першої технологічної стратегії; Фігура 5 структура дисплея з активованими полями введення в першій технологічній стратегії; Фігура 6 структура дисплея для визначення автоматичних регуляторів наступної технологічної стратегії; Фігура 7 структура дисплея для визначення критеріїв оптимізації автоматичних регуляторів наступної технологічної стратегії. Виконана у вигляді зернозбирального комбайна 2 сільськогосподарська машина 1, що схематично представлена на Фіг. 1, в передній частині має жниварку 3, яка відомим способом з'єднується з похилим транспортером 4 комбайна 2. Потік зібраної маси 5, що проходить крізь похилий транспортер 4, у верхній, задній частині похилого транспортера 4 передається на нижні молотильні органи 7 комбайна 2, які щонайменше частково вкриті так званим підбарабанням 6. Розташований за молотильними органами 7 кінцевий барабан перенаправляв потік маси 5, що виступає в задній частині молотильних органів 7, таким чином, що він передається безпосередньо на сепараційний пристрій 10, який представлено в прикладі виконання у вигляді клавішного соломотряса 9. Винахід передбачає, що комбайн 2 замість клавішного соломотряса 9 оснащено відомим і тому не представленим на кресленні, виконаним у вигляді сепараційного ротора сепараційним пристроєм 10. На клавішному соломотрясі 9, що обертається, потік маси 5 транспортується так, що присутнє в зібраній масі зерно 11, що вільно рухається, відділяється в нижній частині клавішного соломотряса 9. Відділене на підбарабанні 6 та на клавішному соломотрясі 9 зерно 11 подається через зворотний піддон 12 та підготовчий піддон 13 на очисний пристрій 17, що складається з декількох рівнів сит 14, 15 та повітродувної установки 16. І нарешті очищений потік зерна за допомогою елеваторів 18 подається в зерновий бункер 19. У подальшому жниварка 3, похилий транспортер 4, молотильні органи 7 та підпорядковане їм підбарабання 6, сепараційний пристрій 10, очисний пристрій 17, елеватори 18 та зерновий бункер 19 називатимуться робочими органами 20 сільськогосподарської машини 1. Також сільськогосподарська машина 1 має кабіну 21, в якій розташовано щонайменше один оснащений дисплеєм 22 пристрій управління і регулювання 23, за допомогою якого в автоматичному режимі або оператором 24 сільськогосподарської машини 1 відбувається управляння більшістю процесів, які детально буде описано нижче. Комунікація пристрою управління і регулювання 23 з більшістю сенсорних систем 26 відбувається через так звану шинну систему 25. Особливості будови сенсорної системи 26 детально описані в патенті DE 101 47 733, зміст якого в повному обсязі стає складовою частиною розголошення цієї патентної заяви, так що у подальшому будова сенсорної системи 26 більше не описується. На Фіг. 2 показане схематичне зображення дисплея 22 пристрою управління і регулювання 23, а також підпорядкований пристрою управління і регулювання 23 і з'єднаний з дисплеєм 22 обчислювальний блок 27. Обчислювальний блок 27 побудовано таким чином, що разом із отриманими від сенсорних систем 26 даними 28 зовнішні дані 29 та дані 30, що зберігаються в самому обчислювальному блоці 27, як, наприклад, знання експертів, він може перетворювати на велику кількість вихідних сигналів 31. При цьому вихідні сигнали 31 влаштовані так, що вони місять щонайменше сигнали управління відображенням 32 та сигнали управління робочими органами 33, причому перші визначають зміст повідомлень дисплея, а останні змінюють різні робочі параметри 34 робочих органів 20 сільськогосподарської машини 1, а стрілка 34 символічно вказує на кількість обертів молотильного барабана. Пристрій управління і регулювання 23 з підпорядкованим йому дисплеєм 22 і обчислювальним блоком 27 є складовою частиною винайденої допоміжної системи машиніста 35, дисплей 22 якої на екрані 36 дозволяє здійснювати інтерактивне, природне мовне спілкування між оператором 24 та допоміжною системою машиніста 35. Екран 36 дисплея 22, окрім одного або декількох полів введення 37, має поля вибору 38 для активації різних процесів, які детально буде описано нижче. Активація відповідного поля вибору 38 відбувається або безпосередньо через клавіші 39 відповідного поля вибору 38 та/або центральну навігаційну кнопку 40, завдяки обертанню або натисканню якої можна переміщуватися між різними полями вибору 38, та/або за допомогою натискання оператором 24 відповідного поля вибору 38, оскільки екран 36 виконано як монітор з сенсорним екраном 41. На Фіг. 2 показано структуру пуску екрана 36, причому клавіша вибору технологічної стратегії "Якість зібраної маси" 42 дозволяє вибрати одну з винайдених технологічних стратегій, які 3 UA 111576 C2 5 10 15 20 25 30 35 40 45 50 55 60 детально буде описано нижче, активація клавіші вибору технологічної стратегії "Автоматичний регулятор" 43 дозволяє редагувати винайдені автоматичні регулятори, яку так само ще буде детально описано нижче, а натискання клавіші вибору "Start" (Пуск) дозволяє активувати допоміжну систему машиніста 35. У наведеному прикладі виконання, в полі введення 37 показано дані для активації автоматичних регуляторів, які детально буде описано нижче, та вибраної технологічної стратегії 42, 43, і призначене оператору питання, що той хотів би зробити. Після активації поля вибору 38 викликається записаний в пам'яті обчислювального блоку 27 пристрою управління і регулювання 23 модуль програмного забезпечення 44, який виходячи з активованої технологічної стратегії 42, 43 з урахуванням записаних в обчислювальному блоці даних 30, а також доступних зовнішніх та внутрішніх даних 28, 29 оптимізує робочі параметри 34 робочих органів 20. На Фіг. 3 за допомогою блок-схеми схематично показано хід винайденого процесу вибору, редагування та активації записаної в пам'яті обчислювального блока 27 технологічної стратегії 42, 43, причому кожну з технологічних стратегій 42, 43 можна використовувати поперемінно або разом для оптимізації робочих параметрів 34 робочих органів 20 сільськогосподарської машини 1. Якщо активувати технологічну стратегію "Якість зібраної маси" 42, за відповідних умов буде ввімкнено ефективний та настільки точний, наскільки потрібно, режим роботи сільськогосподарської машини 1. Для цього оператор 24 сільськогосподарської машини 1 має вибрати критерій вибору 45a-d з великої кількості різних критеріїв вибору 45. В залежності від призначення і пов'язаної з цим, необхідної якості маси, яку потрібно зібрати, у винайденій допоміжній системі машиніста 35 закладено технологічні стратегії 42 для збирання харчових культур (критерій вибору 45а), посівного матеріалу (критерій вибору 45b), кормових культур (критерій вибору 45с) та технічних культур (критерій вибору 45d). Програмне забезпечення реалізує ці технологічні стратегії 42 в характеристиках або алгоритмах 46, які в залежності від відповідного критерію вибору 45a-d поєднують одне з одним різні параметри зібраної маси 47. Визначені в характеристиці 46 математичні залежності можна відносно легко структурувати тоді, коли параметри зібраної маси 47, що мають бути враховані, обмежуються одним або кількома параметрами зібраної маси Бите зерно 47а, Чистота 47b та Намолот 47с, причому загальні залежності різних параметрів зібраної маси 47а-с в залежності від вибраного критерію вибору утворюються таким чином: При активації критерію Харчові культури 45а управління відбувається за оптимальним значенням з мінімальною кількість Битого зерна 47а, максимальним Намолотом 47с та максимальною Чистотою 47b. При активації критерію Посівний матеріал 45b управління відбувається за мінімальною кількістю Битого зерна 47а, причому Чистота 47b та Намолот 47с мають другорядний пріоритет. При активації критерію Кормові культури 45с технологічна стратегія 42 управляється за мінімальним Намолотом 47с, а такі параметри зібраної маси, як Чистота 47b та Бите зерно 47а знову ж таки мають другорядний пріоритет. І навпаки, при активації критерію Технічні культури 45d жодному з параметрів зібраної маси Бите зерно47а, Чистота 47b та Намолот 47с пріоритет не надається. Крім того, тут слід отримати оптимальне значення між цими параметрами зібраної маси 47. Завдяки виконаній оператором 24 активації відповідного критерію вибору 45, як описано вище, в залежності від параметрів зібраної маси проходить перша стадія оптимізації 48 технологічної стратегії 42, яка зрештою приводить до підігнаного під необхідну якість зібраної маси (тут зерна 11) режиму роботи виконаної у вигляді зернозбирального комбайна 2 сільськогосподарської машини 1. Винахід передбачає, що залежності різних параметрів зібраної маси 47 або задаються заздалегідь в характеристиках чи алгоритмах 46, або записуються в пристрій управління і регулювання 23 з можливістю редагування. В останньому випадку також допускається, що підгонка записаних характеристик 46 до особливих умов відповідного сільськогосподарського підприємства відбувається за підтримки консультанта, причому консультантом можуть бути сам фермер, який найкраще знає свої орні угіддя та особливості свого господарства, зовнішні експерти або відповідний виробник сільськогосподарської машини 1. Для подальшого підвищення ефективності сільськогосподарської машини 1 альтернативно чи додатково може передбачатися наступна стадія оптимізації 49, що представляє наступну технологічну стратегію 43 і покращує робочий режим автоматичних регуляторів, які детально буде описано нижче. Автоматичні регулятори 50 відповідно стосуються функціональних сфер сільськогосподарської машини 1 і в наведеному прикладі виконання мають регулятор швидкості руху 50а та/або молотильний автомат 50b, та/або сепараційний автомат 50с, та/або очисний автомат 50d. Винахід передбачає, що можна визначити додаткові автоматичні регулятори 50, як, наприклад, автоматичні робочі органи або автоматичні соломорізки, які потім при необхідності або за бажанням також можна відредагувати за допомогою додаткової 4 UA 111576 C2 5 10 15 20 25 30 35 40 45 50 55 60 технологічної стратегії 43. Режим роботи кожного автоматичного регулятора 50a-d можна покращати за допомогою критеріїв оптимізації 51, що спрямовуються власне на режим роботи сільськогосподарської машини 1 та параметри зібраної маси 45. В представленому прикладі виконання до критеріїв оптимізації 51 належать параметри: "максимальна якість намолоту" 51а, "паливозберігаючий режим роботи сільськогосподарської машини" 51b, "максимальна витрата" 51с та "збалансований режим" 51d, причому параметр "збалансований режим" 51d представляє оптимальне значення решти параметрів 51а-с. Винахід передбачає, що один, декілька або всі вищеназвані параметри 51a-d одночасно враховуються у відповідній технологічній стратегії 42. Відомі і тому детально не описані тут математичні залежності різних критеріїв оптимізації 51 щодо відповідним чином активованих автоматичних регуляторів 50a-d закладаються аналогічно до активації відповідних критеріїв вибору 45 в характеристиках або алгоритмах 52 в пам'яті обчислювального блока 27 пристрою управління і регулювання 23, які загалом можна описати таким чином: Якщо, наприклад, активувати критерій оптимізації "максимальна якість намолоту" 51а, регулятор швидкості руху 50а управляє швидкістю руху і разом з тим витратою зібраної маси сільськогосподарської машини 1 в залежності від втрат зерна. При цьому критерії оптимізації 51а молотильний автомат 50b управляє такими параметрами молотильних органів 7, як, наприклад, відстань від підбарабання 6 до молотильних органів 7 та кількість обертів молотильних органів 7, так, що можна отримати високу інтенсивність намолоту та низьку частку битого зерна. При цьому ж критерії оптимізації 51а автоматичний сепараційний пристрій 50с забезпечує слабке пошкодження структури соломи в потоці зібраної маси 5 в зоні сепараційного пристрою 10, переважно при використанні сепараційних пристрів, що обертаються, так що в зоні сепараційного пристрою 10 головним чином відділяється зерно 11 та невелика кількість часточок соломи. І нарешті, при виборі критерію оптимізації "максимальна якість намолоту" 51а очисний автомат 50d забезпечує високу чистоту зерна та відсутність невимолоченого колосся в зерновому бункері 19. Якщо активувати критерій оптимізації "ефективність використання палива" 51b, у порівнянні з вищеописаним критерієм оптимізації молотильний автомат 50b знижує якість намолоту на користь низького рівня використання палива, але в той же час забезпечує низьку частку битого зерна. При активації критерію оптимізації 51b автоматичний сепараційний пристрій 50с діє головним чином як при активації критерію оптимізації 51а, але для сепараційного пристрою 10, що обертається, бажано встановити найнижчий рівень споживання енергії, а також найнижчу можливу кількість обертів ротора. При виборі паливозберігаючого режиму роботи очисний автомат 50в забезпечує оптимальне значення якості зібраної маси та ефективності очистки, причому це оптимальне значення значною мірою залежить від вищеописаного критерію вибору 45. Оскільки паливозберігаючий режим роботи значною мірою залежить від енергоспоживання робочих органів, при активованому критерії оптимізації "ефективність використання палива" 51b регулятор швидкості руху 50а має другорядне значення і управляє швидкістю руху в залежності від вимог решти автоматичних регуляторів 50b-50d. Однак в той час як параметри решти автоматичних регуляторів 50b-50d знаходяться в оптимальному діапазоні, енергоефективний режим роботи, а саме максимально можливий розхід зерна на літр палива, досягається тоді, коли сільськогосподарська машина експлуатується на максимально можливій швидкості руху. При активації критерію оптимізації "максимальна витрата" 51с всі автоматичні регулятори 50 доводяться до максимальної продуктивності, тобто регулятор швидкості руху 50а встановлює максимально можливу та допустиму швидкість руху, молотильний автомат 50b доводить молотильні органи 7 до максимальної продуктивності молотарки, сепараційний автомат 50с сприяє максимальній ефективності сепарації, а очисний автомат 50d управляє очисним пристроєм 17 так само з максимальною і допустимою ефективністю очистки. На підставі того, що "енергоефективний" за умови, що параметри різних автоматичних регуляторів знаходяться в оптимальному діапазоні, також може означати "максимально можливу витрату", може статися так, що критерії оптимізації "ефективність використання палива" 51b та "максимальна витрата" 51с можуть впливати на одну й ту саму стратегію управління. І навпаки, при активації критерію оптимізації "збалансований режим" 51d молотильний автомат 50 регулюється таким чином, що він забезпечує оптимальний намолот при низькій частці битого зерна та при високій витраті. При активації критерію оптимізації 51d автоматичний сепараційний пристрій 50с діє таким чином, що оптимальне значення встановлюється з максимальної загальної витрати за мінімальної кількості битого зерна та мінімального подрібнення соломи при високій витраті. Очисний автомат 50d управляє очисним пристроєм 17 в збалансованому режимі роботи автоматичних регуляторів 50 за оптимальним значенням чистоти зерна та ефективності очистки. Оскільки збалансований режим роботи 5 UA 111576 C2 5 10 15 20 25 30 35 40 45 50 55 60 сільськогосподарської машини 1 значеною мірою залежить від робочого режиму автоматичних регуляторів 50b-50d, при активованому критерії оптимізації "збалансований режим" 51d регулятор швидкості руху 50а має другорядне значення і управляє швидкістю руху в залежності від вимог решти автоматичних регуляторів 50b-50d. На останній стадії технологічного процесу 53 згідно з Фіг. 3 відбувається візуалізація отриманих параметрів, при цьому спосіб візуалізації детально буде описано нижче. Згідно з Фіг. 2 та відповідним описом винайдена допоміжна система машиніста 35 запускається, коли оператор 24 активує одне з полів вибору 38 за допомогою клавіш 39 або навігаційної кнопки 40 або за допомогою функції сенсорного екрана. В той час як оператор 24 активує поле вибору технологічної стратегії "Якість зібраної маси" 42, згідно з Фіг. 4 на екрані 36 відображаються активовані критерії вибору 45, тут - харчові культури 45а, посівний матеріал 45b, кормові культури 45с та технічні культури 45d. В залежності від побажання замовника оператор 24 обирає один з критеріїв вибору 45a-d через активацію відповідного поля вибору 38. В одному з варіантів розробки в полі введення 37 оператор 24 може спочатку отримати інформацію про те, що він має робити. Крім того, може передбачатися додаткове поле вибору 54, через активацію якого не відбувається визначення критерію вибору 45а-d Це може бути тоді, коли правильний критерій вибору вже активовано або визначення критерію вибору 45a-d не повинне статися. Якщо критерій вибору 45a-d вибрано, в подальшій корисній розробці згідно з Фіг. 5 можна передбачити, щоб відкрилося додаткове вікно введення 55, в якому для оператора 24 будуть відображатися залежності та взаємодії між активованим критерієм вибору 45a-d та активованим автоматичним регулятором (або регуляторами) 50a-d. На Фіг. 6 показано структуру екрана 36, після того як оператор 24 запустив допоміжну систему машиніста 35 і в структурі пуску згідно з рисунком, активував поле вибору технологічної стратегії "Автоматичний регулятор" 43 за допомогою клавіш 39 або навігаційної кнопки 40 або за допомогою функції сенсорного екрана 41. В полях вибору 38, що відображаються після цього, можна активувати або деактивувати регулятор швидкості руху 50а, молотильний автомат 50b, сепараційний автомат 50с та очисний автомат 50d. Безпосередньо в полі введення оператор 24 також може активувати або деактивувати автоматичні регулятори 50. Винахід передбачає, що активація або дезактивація автоматичних регуляторів 50 може відбуватися автоматично за допомогою пристрою управління і регулювання 23, причому ця автоматична активація або дезактивація вмикається тоді, коли встановлено, що певні параметри зібраної маси 47 або режим роботи сільськогосподарської машини 1 в цілому погіршуються. Якщо оператор 24 відредагував автоматичний регулятор (або регулятори) 50, дисплей 22 переключається на показану Фіг. 7 структуру екрана 36. На екрані 36 тепер відображаються різні критерії оптимізації 51a-d, причому кожен з критеріїв оптимізації 51a-d знову ж таки можна активувати за допомогою клавіш 39, навігаційної кнопки 40 або за допомогою функції сенсорного екрана 41. При цьому в полі введення оператору 24 повідомляється, які дії очікуються від нього на екрані, що відображається. Якщо всі критерії вибору 45 та критерії оптимізації 51 визначено, згідно з Фіг. 2 і 3 викликаються записані в модуль програмного забезпечення 44 пристрою управління і регулювання 23 характеристики 46, 52 та відбувається оптимізація робочих параметрів 34 робочих органів сільськогосподарської машини 1, а також в залежності від варіанта розробки генеровані за допомогою пристрою управління і регулювання 23 сигнали робочих органів 33 встановлюються безпосередньо на відповідні робочі органи 20. Одночасно дисплей 22 знову переключається на показану на Фіг. 7 структуру екрана 36. Список умовних позначень: 1) сільськогосподарська машина 2) зернозбиральний комбайн 3) жниварка 4) Похилий транспортер 5) потік зібраної маси 6) підбарабання 7) молотильний орган 8) кінцевий барабан 9) клавішний соломотряс 10) сепараційний пристрій 11) зерно 12) зворотний піддон 13) підготовчий піддон 6 UA 111576 C2 5 10 15 20 25 30 35 40 14) рівень сита 15) рівень сита 16) повітродувна установка 17) очисний пристрій 18) елеватор 19) зерновий бункер 20) робочий орган 21) кабіна 22) дисплей 23) пристрій управління і регулювання 24) оператор 25) шинна система 26) сенсорна система 27) обчислювальний блок 28) внутрішні дані 29) зовнішні дані 30) дані 31) вихідний сигнал 32) сигнал відображення 33) сигнали робочих органів 3). робочі параметри 35) допоміжна система машиніста 36) екран 37) поле введення 38) полем вибору 39) клавіша 4). навігаційна кнопка 41) монітор з сенсорним екраном 42) технологічна стратегія 43) технологічна стратегія 44) модуль програмного забезпечення 45) критерій вибору 46) храктеристика, алгоритм 47) параметри зібраної маси 48) 1 стадія оптимізації 4) 2 стадія оптимізації 50) автоматичний регулятор 5) критерій оптимізації 52) характеристика, алгоритм 53) візуалізація 54) поле вибору 55) поле введення 56) поле введення 57) поле введення 45 ФОРМУЛА ВИНАХОДУ 50 55 60 1. Зернозбиральний комбайн з допоміжною системою машиніста, причому зернозбиральний комбайн має велику кількість робочих органів, що обробляють зібрану масу, яка проходить через зернозбиральний комбайн, та допоміжну систему машиніста, що складається щонайменше з одного пристрою для обробки даних та управління та дисплею, а пристрій для обробки даних та управління обробляє отримані від внутрішніх сенсорних систем дані, дані, що записані в пристрої для обробки даних та управління, та зовнішні дані, який відрізняється тим, що допоміжна система машиніста (35) містить технологічні стратегії (42, 43), які можна вибирати, причому критеріями вибору (45) технологічної стратегії (42, 43) є якість зібраної маси, необхідна для певного призначення зібраної маси (5, 11), та/або критерії оптимізації (51) робочих органів (20). 2. Зернозбиральний комбайн з допоміжною системою машиніста за п. 1, який відрізняється тим, що критеріями вибору (45) є "харчові культури" (45а), "посівний матеріал" (45b), "кормові культури" (45с) та/або "технічні культури" (45d). 7 UA 111576 C2 5 10 15 20 25 30 35 40 45 50 55 3. Зернозбиральний комбайн з допоміжною системою машиніста за пп. 1 і 2, який відрізняється тим, що кожна технологічна стратегія (42) враховує один або декілька параметрів зібраної маси (47) "бите зерно" (47а), "чистота" (47b) та "намолот" (47с) таким чином, що при активації критерію вибору "харчові культури" (45а) управління відбувається за оптимальним значенням з мінімальною кількістю "битого зерна" (47а), максимальним "намолотом" (47с) та максимальною "чистотою" (47b), що при активації критерію вибору "посівний матеріал" (45b) управління відбувається за мінімальною кількістю "битого зерна" (47а), а "чистота" (47b) та "намолот" (47с) мають другорядний пріоритет, що при активації критерію вибору "кормові культури" (45с) управління відбувається за максимальним "намолотом" (47с), а "чистота" (47b) та "бите зерно" (47а) мають другорядний пріоритет, що при активації критерію вибору "технічні культури" (45d) жодному з параметрів зібраної маси "бите зерно" (47а), "чистота" (47b) та "намолот" (47с) пріоритет не надається. 4. Зернозбиральний комбайн з допоміжною системою машиніста за п. 3, який відрізняється тим, що закладені в характеристиках або алгоритмах (46) залежності параметрів зібраної маси (47) критерію вибору (45a-45d) записані в пристрої управління і регулювання (23) з можливістю редагування. 5. Зернозбиральний комбайн з допоміжною системою машиніста за одним із пп. 1-4, який відрізняється тим, що технологічні стратегії (42, 43) можуть мати додаткові або альтернативні критерії оптимізації (51) "Максимальну якість намолоту" (51а) та/або "Ефективність використання палива" (51b), та/або "Максимальну витрату" (51с), та/або "Збалансований режим" (51d). 6. Зернозбиральний комбайн з допоміжною системою машиніста за одним із пп. 3-5, який відрізняється тим, що критерії вибору (45) та/або критерії оптимізації (51) виводяться для оператора (24) комбайна (2) на дисплей (22) з можливістю вибору і вибір відбувається за допомогою функції сенсорного екрана (41) або за допомогою клавіш (39, 40), а встановлена за допомогою активованого критерію вибору (45) та/або критерію оптимізації (51) технологічна стратегія (42, 43) реалізується через закладені в пристроях управління і регулювання (23) характеристики або алгоритми (46, 52). 7. Зернозбиральний комбайн з допоміжною системою машиніста за п. 6, який відрізняється тим, що режим роботи робочих органів (20) управляється через автоматичні регулятори (50), і автоматичні регулятори (50) мають регулятор швидкості руху (50а) та/або молотильний автомат (50b), та/або сепараційний автомат (50с), та/або очисний автомат (50d). 8. Зернозбиральний комбайн з допоміжною системою машиніста за п. 7, який відрізняється тим, що в полі введення (55) дисплея (22) виконується загальна команда, що і який вплив має вибрана за допомогою критерію вибору (45) та критерію оптимізації (51) технологічна стратегія (42, 43) на принцип дії автоматичних регуляторів (50) та/або параметри зібраної маси (47). 9. Зернозбиральний комбайн з допоміжною системою машиніста за п. 7 або 8, який відрізняється тим, що режим роботи автоматичних регуляторів (50) можна редагувати і можливість редагування реалізується через дисплей (22), а один або декілька автоматичних регуляторів (50) можуть включатися, виключатися або редагуватися автоматично або оператором (24) за допомогою пристрою управління і регулювання (23). 10. Зернозбиральний комбайн з допоміжною системою машиніста за п. 9, який відрізняється тим, що оптимізовані в пристрої управління і регулювання (23) пропозиції припасування для одного або декількох автоматичних регуляторів (50) отримуються й відображаються для оператора (24) в діалоговому вікні дисплея (22). 11. Спосіб експлуатації зернозбирального комбайна з допоміжною системою машиніста за одним із пп. 1-9, який відрізняється тим, що спосіб передбачає наступні кроки: а) на першому кроці меню оператору (23) сільськогосподарської машини (1, 2) пропонується вибрати технологічну стратегію (42, 43), причому технологічна стратегія (42, 43) поперемінно або одночасно передбачає активацію критерію вибору (45), що визначає якість зібраної маси (5, 11), та/або критерію оптимізації (51) режиму роботи робочих органів (20); б) в залежності від вибраної технологічної стратегії (42, 43) в наступному кроці меню оператору (24) пропонується вибрати критерій вибору (45a-d) та/або активувати автоматичні регулятори (50a-d) і відповідний критерій оптимізації (51); в) в залежності від активованої оператором (24) сільськогосподарської машини (1, 2) технологічної стратегії (42, 43) допоміжна система машиніста (35) передає оптимізовані робочі параметри (34) щонайменше на один робочий орган (20) та впливає на настройку оптимізованого параметра (34) щонайменше на одному робочому органі (20). 8 UA 111576 C2 9 UA 111576 C2 10 UA 111576 C2 11 UA 111576 C2 Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 12
ДивитисяДодаткова інформація
Автори англійськоюBAUMGARTEN JOACHIM, Neu Sebastian, Bussmann Christoph, Wilken Andreas, Voecking Henner, Heitmann Christoph
Автори російськоюБаумгартен Иоахим
МПК / Мітки
МПК: A01D 41/127
Мітки: зернозбиральний, експлуатації, машиніста, комбайн, спосіб, системою, комбайна, допоміжною
Код посилання
<a href="https://ua.patents.su/14-111576-zernozbiralnijj-kombajjn-z-dopomizhnoyu-sistemoyu-mashinista-ta-sposib-ekspluataci-kombajjna.html" target="_blank" rel="follow" title="База патентів України">Зернозбиральний комбайн з допоміжною системою машиніста та спосіб експлуатації комбайна</a>
Зернозбиральний комбайн
Номер патенту: 107924
Опубліковано: 10.03.2015
Автори: Беулке Крістіан, Шверсманн Бертольд, Хольтманн Бернд
МПК: A01F 12/32, A01D 75/28
Мітки: комбайн, зернозбиральний
Формула / Реферат:
1. Зернозбиральний комбайн (1) з сепаратором (17) та очисним пристроєм (4), а також зі з'єднаним з сепаратором (17) та розташованим поперечно до напрямку руху зворотним піддоном (21), до якого приєднано транспортер (29, 30), який перед подачею на очисний пристрій (4) розподіляє зібрану масу за допомогою сепаратора (17) на зворотний піддон (21), поперечно до напрямку руху, при цьому кількість зібраної маси, що розподіляється транспортером...
Зернозбиральний комбайн
Номер патенту: 95452
Опубліковано: 10.08.2011
Автори: Дамман Мартін, Клеффман Бернд, Деппе Маркус
МПК: A01F 12/52
Мітки: зернозбиральний, комбайн
Формула / Реферат:
1. Зернозбиральний комбайн 1 з несучою рамою, розташованим на несучій рамі корпусом машини 26, розташованою на несучій рамі і/або на корпусі машини 26 кабіною водія 27, пристроєм для приймання збираної сільськогосподарської продукції, щонайменше однією молотаркою 7, щонайменше одним сепараторним механізмом 19, щонайменше одним очищувальним вузлом 14 та щонайменше одним транспортувальним пристроєм 16 для повернення потоку сходового матеріалу...
Зернозбиральний комбайн
Номер патенту: 63893
Опубліковано: 16.02.2004
Автор: Штрікман Дітер
МПК: A01D 41/02
Мітки: зернозбиральний, комбайн
Формула / Реферат:
1. Зернозбиральний комбайн з різальним механізмом, живильним шнеком і похилим транспортером, який подає зібраний врожай у молотильний апарат, розташованим нижче молотильного апарата транспортуючим днищем, а також розташованим між виступним збоку кінцем похилого транспортера і молотильним апаратом пристроєм для відокремлення сторонніх тіл, що може бути приведений в дію обертово, вісь обертання якого розташована паралельно осям кінцевого...
Зернозбиральний комбайн
Номер патенту: 75585
Опубліковано: 15.05.2006
Автори: Брінкманн Йорн, Пердун Мартін, Стрікманн Дітер, Амсбек Дітер, Нірманн Мартін, Куцерін Сергей, Нольманн Юрген
МПК: A01D 41/00
Мітки: зернозбиральний, комбайн
Формула / Реферат:
1. Зернозбиральний комбайн з соломотрясами (2) або обертовим пристроєм для відокремлення соломи, повітряним грохотом (8) для відокремлення полови, подрібнювачем соломи (3) і щонайменше одним встановленим за ним вентилятором-розкидачем (4) зі спрямованою у напрямку ґрунту віссю обертання для широкого розкидання подрібненої маси і/або полови, причому вихідний отвір подрібнювача (3) знаходиться в площині вхідного отвору щонайменше одного...
Зернозбиральний комбайн
Номер патенту: 46065
Опубліковано: 15.05.2002
Автор: Шило Леонід Якович
МПК: A01D 41/02
Мітки: зернозбиральний, комбайн
Формула / Реферат:
1. Зернозбиральний комбайн, що містить молотарку, джерело електроенергії, сушильний пристрій, який відрізняється тим, що він додатково обладнаний лівою і правою стрічковими сушарками, виконаними у вигляді похило встановлених один над одним коробчастих кожухів з стрічковими транспортерами усередині і з можливістю передачі хлібної маси в молотарку шляхом послідовного її пересипання з транспортера на транспортер через вікна у кожухах, лівим та...
Попередній патент: Застосування наночастинки, що включає металевий матеріал і матеріал оксиду гафнію, для одержання терапевтичного засобу для лікування раку у ссавця
Наступний патент: Спосіб оцукрювання лігноцелюлозного матеріалу
Випадковий патент: Обтискна шайба для осьової фіксації деталей на тонкостінних пустотілих валах