Пристрій для визначення положення механічних елементів
Формула / Реферат
1. Пристрій для визначення положення першого механічного елемента (10) і другого механічного елемента (12) відносно один одного, що містить перший вимірювальний модуль (14), який встановлений на першому механічному елементі, і другий вимірювальний модуль (18), що встановлений на другому механічному елементі, а також блок обробки результатів вимірювання (22), причому перший вимірювальний модуль оснащений засобами (24) для формування світлового пучка (28), поверхнею управління (34) для розсіювання падаючого на поверхню управління світла (WV і PV), камерою (36) для запису зображень поверхні управління, а другий вимірювальний модуль містить систему відбивачів (38), звернену до першого вимірювального модуля, якщо вимірювальні модулі встановлені на відповідних механічних елементах для віддзеркалення світлового пучка (28’ і 28”) на поверхню управління, при цьому на підставі графічних даних, що передані камерою, блок обробки результатів вимірювання виконаний з можливістю визначення на поверхні управління точки падіння світлового пучка, відбитого системою відбивачів, і на підставі цього визначити положення першого і другого механічних елементів відносно один одного.
2. Пристрій за п. 1, який відрізняється тим, що камера (36) направлена на сторону поверхні управління (34), звернену до системи відбивачів.
3. Пристрій за п. 2, який відрізняється тим, що камера (36) зміщена у бік відносно поверхні управління (34).
4. Пристрій за п. 3, який відрізняється тим, що камера (36) перекинута відносно поверхні управління (34).
5. Пристрій за п. 1, який відрізняється тим, що поверхня управління виконана у вигляді матової пластинки (134), причому камера (36) направлена на віддалену від системи відбивачів сторону матової пластинки.
6. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що перший вимірювальний модуль (14) оснащений засобами (33) для знімного закріплення камери (36).
7. Пристрій для визначення положення першого механічного елемента (10) і другого механічного елемента (12) відносно один одного, який містить перший вимірювальний модуль (14), що встановлений на першому механічному елементі, і другий вимірювальний модуль (18), що встановлений на другому механічному елементі, а також камеру (36) і блок обробки результатів вимірювання (22), причому перший вимірювальний модуль оснащений засобами (24) для формування світлового пучка (28, 30) і поверхнею управління (34) для розсіювання падаючого на поверхню управління світла (WV, PV), а другий вимірювальний модуль містить систему відбивачів (38), яка звернена до першого вимірювального модуля, якщо вимірювальні модулі розміщені на відповідних механічних елементах так, що можуть відображати світловий пучок на поверхню управління, при цьому камера виконана з можливістю руху відносно обох вимірювальних модулів та придатна для запису зображення поверхні управління, та на підставі графічних даних, що передані камерою, блок обробки результатів вимірювання виконаний з можливістю визначення на поверхні управління точки падіння світлового пучка (28', 28"), відбитого системою відбивачів, а виходячи з цього визначити положення першого і другого механічних елементів відносно один одного.
8. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що система відбивачів (38) містить першу зворотну поверхню 42 і другу зворотну поверхню (44), які розташовані під кутом відносного одна одної з можливістю відображення світлового пучка від першої зворотної поверхні на другу, а звідти у напрямку до поверхні управління (34).
9. Пристрій за п. 8, який відрізняється тим, що перша (42) і друга (44) зворотні поверхні системи відбивачів (38) розташовані вертикально відносно одна одної.
10. Пристрій за п. 9, який відрізняється тим, що система відбивачів (38) виконана у формі призми.
11. Пристрій за п. 10, який відрізняється тим, що система відбивачів (38) виконана у формі призми Порро або трипель-призми.
12. Пристрій за п. 8-11, який відрізняється тим, що звернена до першого вимірювального модуля (14) поверхня (40) системи відбивачів (38) призначена для того, щоб відображати частину світлового пучка до поверхні управління, і передавати частину світлового пучка до першої зворотної поверхні.
13. Пристрій за п. 1-11, який відрізняється тим, що світловий пучок представлений першим світловим пучком (28), а засоби для формування першого світлового пучка призначені також для формування другого світлового пучка (30), причому обидва світлові пучки виконані з прямуванням в основному в один бік, але розрізняються спектрально, причому звернена до першого вимірювального модуля поверхня (40) системи відбивачів (38) виконана у вигляді роздільника кольорів, і при цьому відносно першого світлового пучка у неї переважає функція відбивача в порівнянні з другим пучком, а відносно другого світлового пучка у неї переважає функція передавача в порівнянні з першим світловим пучком, причому передбачена як мінімум перша зворотна поверхня (42) системи відбивачів, призначена для віддзеркалення другого світлового пучка, переданого через поверхню, звернену до першого вимірювального модуля.
14. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що як перший механічний елемент виступає перший вал (10), а як другий механічний елемент виступає другий вал (12), причому вимірювальний модуль (14) розташовано на периферійній поверхні першого вала, а другий вимірювальний модуль (18) розташовано на периферійній поверхні другого вала.
15. Пристрій за п. 14, який відрізняється тим, що блок обробки результатів вимірювання (22) виконаний з можливістю визначення кутового зсуву, а також вертикального і горизонтального зсувів валів на підставі графічних даних, записаних при різних положеннях кута повороту валів (10 і 12).
16. Пристрій за п. 11 і 15, який відрізняється тим, що дах (46) призми (38) розташований головним чином тангенціально відносно до периферійної поверхні валів.
17. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що камера містить об'єктив (35) з фіксованою фокусною відстанню.
18. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що поверхня управління (34) оснащена оптичними марками (50).
19. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що блок обробки результатів (22) виконаний з можливістю проведення корекції графічних зображень, що передані камерою (36), з урахуванням її перекинутого положення відносно до поверхні управління (34).
20. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що перший вимірювальний модуль (14) містить інклінометр (27).
21. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що камера (36) містить інклінометр (29).
22. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що перший вимірювальний модуль (14) має заднє підсвічування (25) для поверхні управління (33).
23. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що камера (36) містить засоби (23) для освітлення поверхні управління (34).
24. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що камера (36) виконана у вигляді смартфона.
25. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що поверхня управління (34) оснащена декількома, розподіленими по ній графічними кодами (60А, 60В, 60С, 60D) для кодування даних, пов'язаних з поверхнею управління і/або вимірювальним модулем, оснащеним поверхнею управління.
26. Спосіб визначення положення першого механічного елемента (10) і другого механічного елемента (12) відносно один одного, причому перший вимірювальний модуль (14), встановлюють на першому механічному елементі, а другий вимірювальний модуль (18) встановлюють на другому механічному елементі, за допомогою першого вимірювального модуля формують світловий пучок (28, 30), а за допомогою системи відбивачів (38) другого вимірювального модуля світловий пучок відбивається на поверхню управління (134) першого вимірювального модуля, вільно рухливу камеру позиціонують відносно обох вимірювальних модулів, і записують щонайменше одне зображення поверхні управління, і проводять оцінку щонайменше одного зображення, що дозволяє визначити на поверхні управління точку падіння (WV, PV) відбитого системою відбивачів світлового пучка, і на основі цього визначають положення першого і другого механічного елементів відносно один одного.
27. Спосіб за п. 26, який відрізняється тим, що камеру (36) направляють на звернену до системи відбивачів (38) сторону поверхні управління (134).
28. Спосіб за п. 26, який відрізняється тим, що поверхню управління (134) виконують у вигляді матової пластинки, а камеру (36) направляють на віддалену від системи відбивачів сторону матової пластинки.
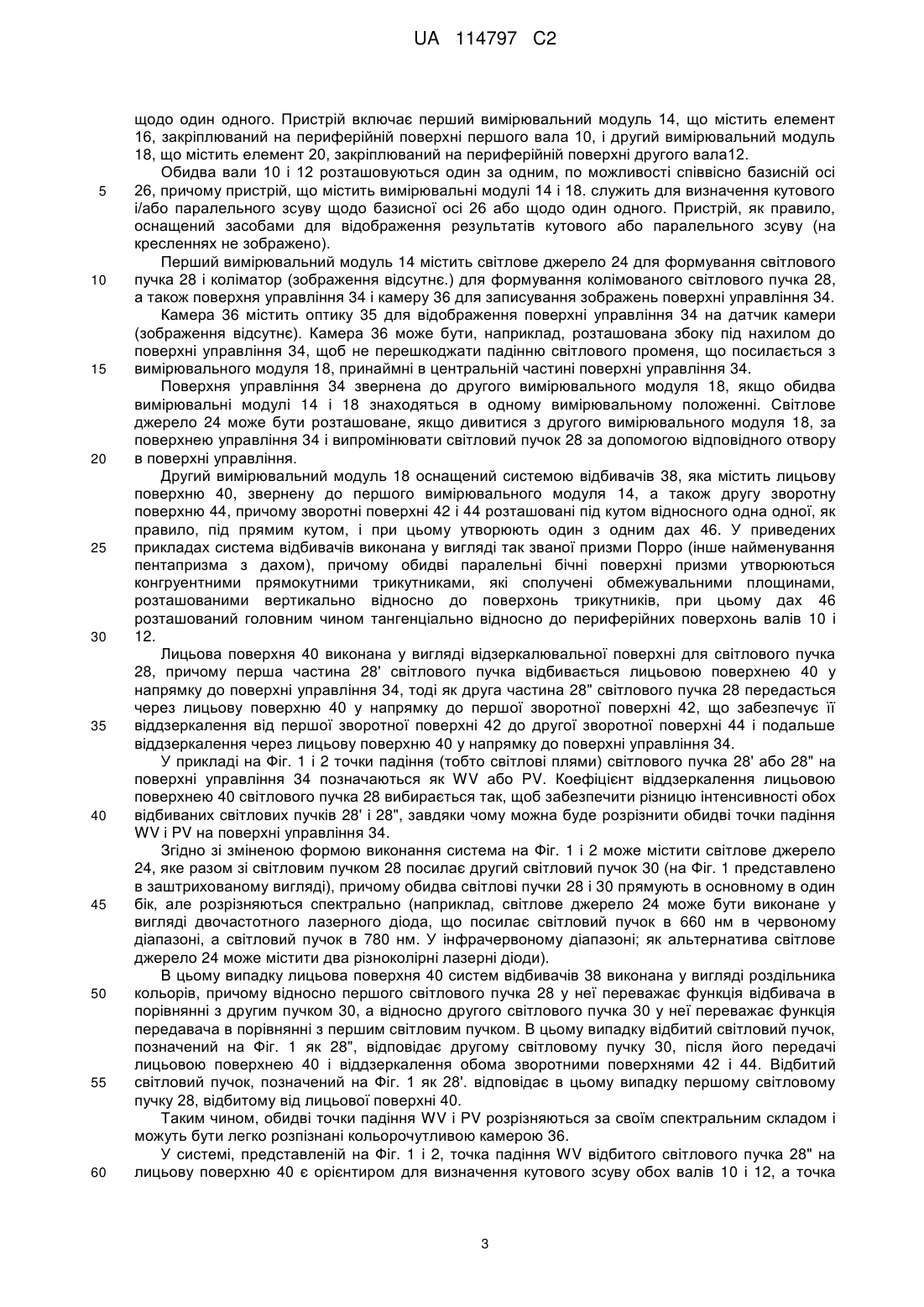
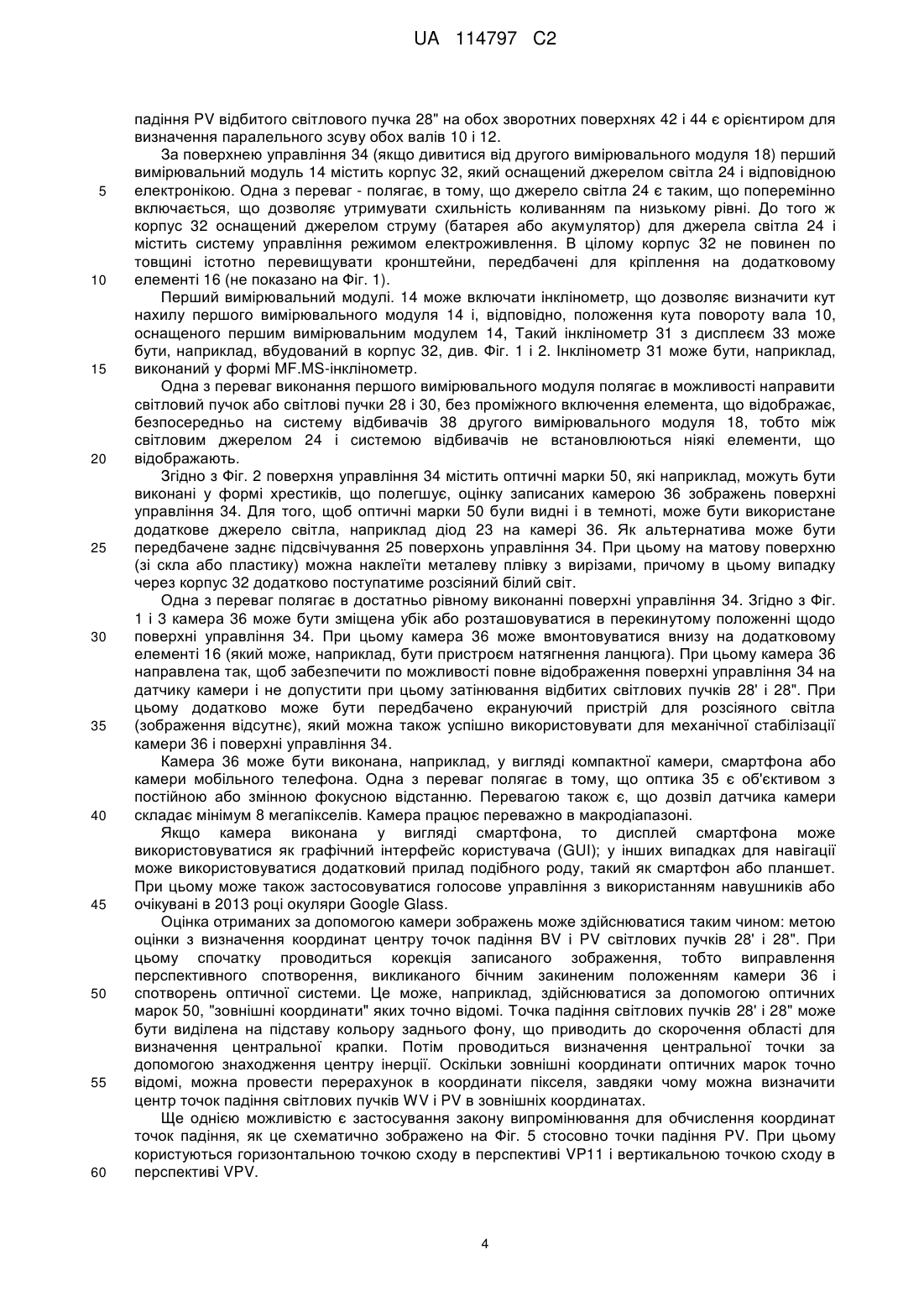
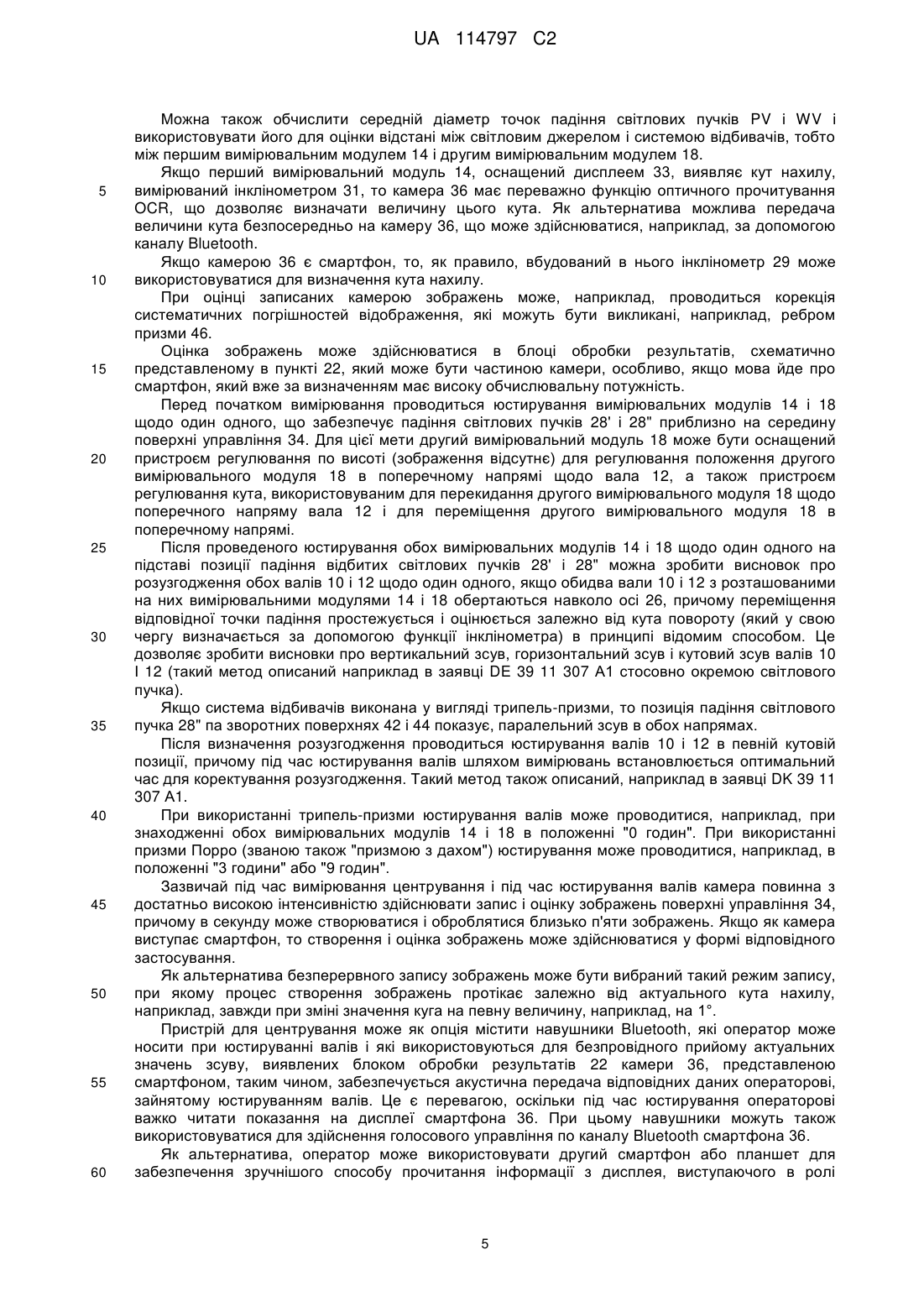
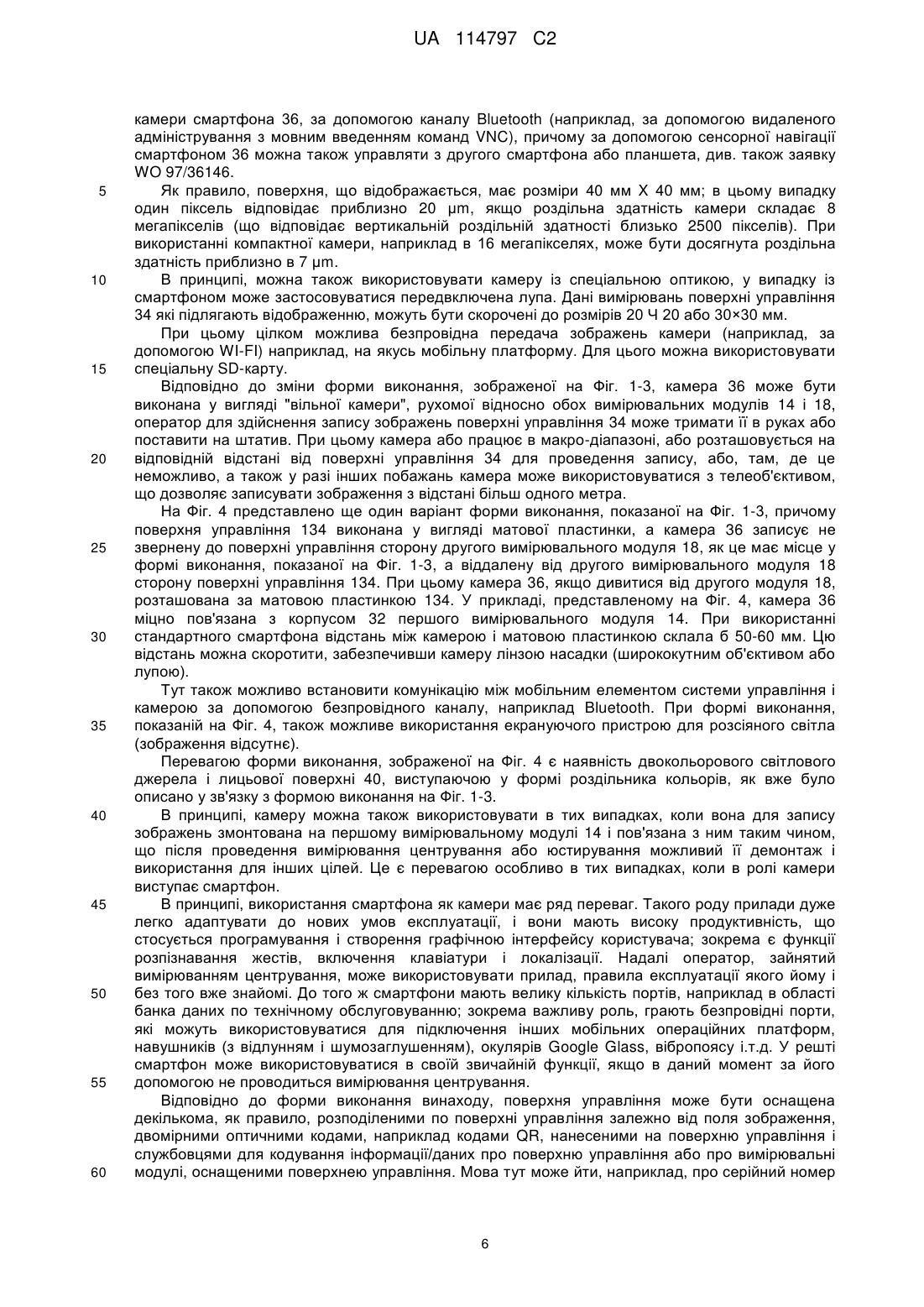
Текст
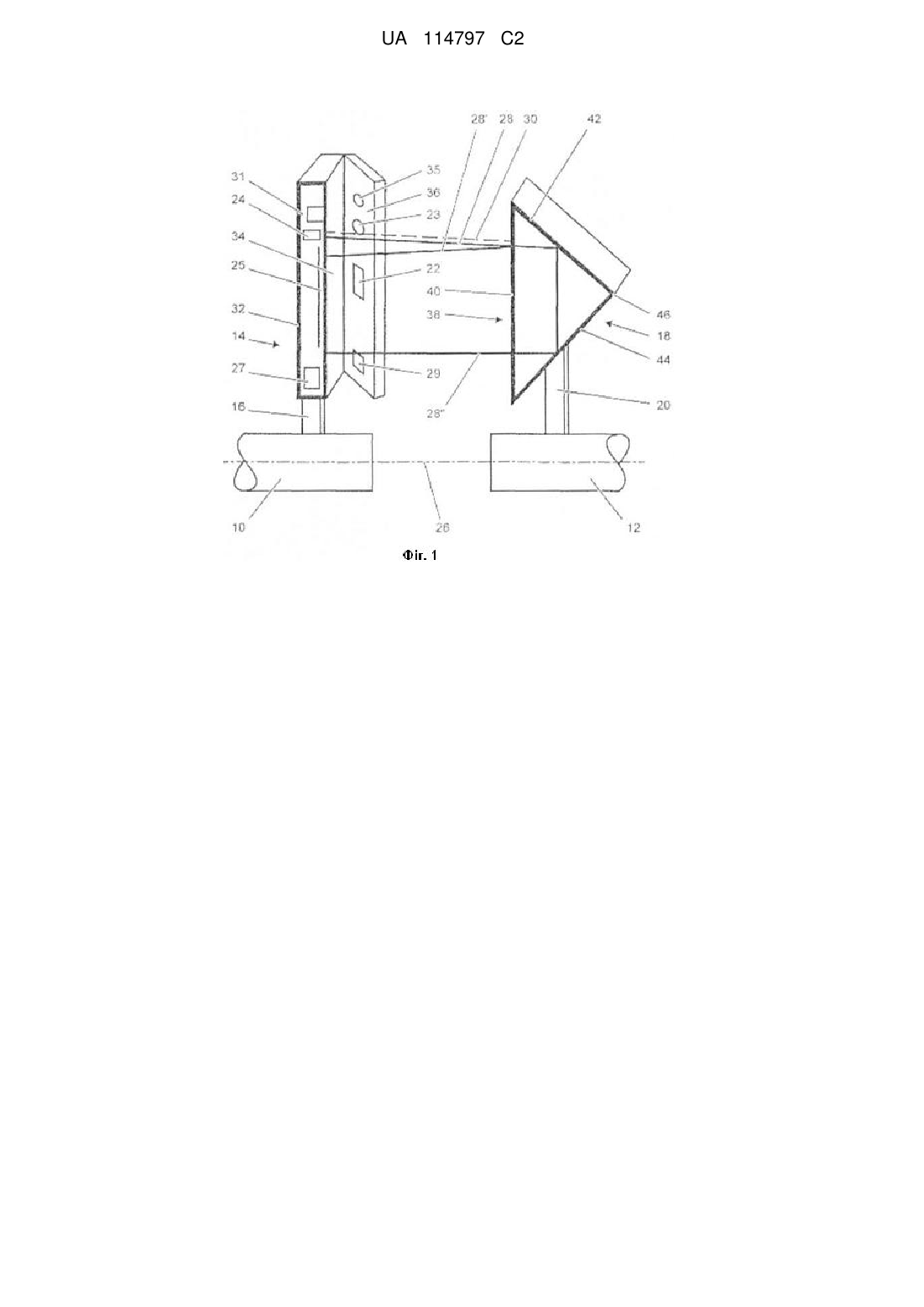
Реферат: Винахід належить до пристрою для визначення положення першого механічного елемента (10) і другого механічного елемента (12) відносно один одного і містять перший вимірювальний модуль (14), який встановлюється на першому механічному елементі, і другий вимірювальний модуль (18), що встановлюється на другому механічному елементі, а також блок обробки результатів вимірювання (22), причому перший вимірювальний модуль оснащений засобами (24) для формування щонайменше одного світлового пучка (28, 30), поверхнею управління (34, 134. 234) для розсіювання падаючого на поверхню управління світла (WV, PV) і камеру (36) для запису зображень поверхні управління, а другий вимірювальний модуль містить систему відбивачів (38), яка звернена до першого вимірювального модуля, якщо обидва вимірювальні модулі розташовано на відповідних механічних елементах так, щоб відображати світловий пучок (28’, 28”) на поверхню управління, і причому блок обробки результатів виконаний так, що може на підставі графічних даних, що передані камерою визначити на поверхні управління точку падіння світлового пучка, відбитого системою відбивачів, та на підставі цього визначити положення першого механічного елемента і другого механічного елемента відносно один одного. UA 114797 C2 (12) UA 114797 C2 UA 114797 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до пристрою для визначення положення першого і другого механічних елементів щодо один одного і містить перший вимірювальний модуль, що встановлюється на першому механічному елементі, а другий вимірювальний модуль, що встановлюється на другому механічному елементі, а також блок обробки результатів. Такого роду пристрій може призначатися, наприклад, для визначення центрування двох валів щодо один одного. Як правило, у таких пристроїв для вимірювання центрування валів як мінімум один з вимірювальних модулів оснащений світловим джерелом для формування світлового променя, точка падіння якого визначається на одному або декількох детекторах або на детекторі, розташованому на вимірювальному модулі, який оснащений джерелом світла, причому в останньому випадку інший вимірювальний модуль відображає назад світловий промінь. Як правило, для визначення центрування валів щодо один одного обчислюється точка падіння світлового променя в декількох положеннях кута повороту, для цього вимірювальні модулі зміщуються уздовж периферійних поверхонь валів, або здійснюється обертання валів з розташованими на периферійних поверхнях вимірювальними модулями. У заявках DΕ 33 20 163 А1 і DE 39 11 307 А1 описаний пристрій для вимірювання центрування валів, в якому як перший вимірювальний модуль посилає світловий промінь, відбиваний призматичним відбивачем другого вимірювального модуля на оптичний детектор першого вимірювального модуля. У заявці DE 33 35 336 А1 описаний пристрій для вимірювання центрування валів, в якому як перший, так і другий вимірювальні модулі посилають світлові промені і містять оптичний детектор, причому кожен світловий промінь направлений на детектор іншого вимірювального модуля. Пристрій, що працює за таким принципом, для вимірювання центрування валів описаний також в патенті US 6,873,931 В1, причому кожен вимірювальний модуль оснащений двоосним датчиком прискорення для автоматичного обліку кута повороту вала. Із заявки DE 38 14 466 А1 відомий пристрій для вимірювання центрування валів, в якому перший вимірювальний модуль посилає світловий промінь, падаючий на дно розташованих один за одним в осьовому напрямі двоосних оптичних детектора другого вимірювального модуля. Із заявки WO 03/067187 А1 відомий пристрій для вимірювання центрування валів, в якому перший вимірювальний модуль посилає промінь, що розходиться, падаючий на два розташованих один за одним в осьовому напрямі двоосних оптичних детектора другого вимірювального модуля. Із заявки WO 00/28275 А1 відомий пристрій для вимірювання центрування валів, в якому обидва вимірювальні модулі розташовуються на лицьовій стороні відповідних валів, причому перший вимірювальний модуль посилає світловий промінь, що розходиться, падаючий збоку на три маркувальні штифти, розташовані на рівні другого вимірювального модуля. У заявці ЕР 0 962 746 А2 описаний пристрій для вимірювання центрування валів, у якому перший модуль містить джерело для світлового променя одного кольору, роздільник променя, а також кольорочутливий детектор CCD із зарядовим зв'язком, а другий модуль містить джерело для світлового променя іншого кольору, а також роздільник квітів (кольоровибірковий роздільник променя), який для першого кольору виступає у функції відбивача, а для другого кольору виступає у функції передавача, причому світлове джерело другого модуля, якщо дивитися від першого модуля, розташоване за роздільником кольорів, а світлове джерело першого модуля, якщо дивитися від другого модуля, розташоване за роздільником променя. Посиланий першим модулем світловий промінь проходить спочатку через роздільник променя першого модуля і потім відбивається від роздільника кольорів другого модуля, причому цей відбитий промінь знов відбивається від роздільника променя першого вимірювального модуля, щоб досягти детектора. Світловий промінь другого модуля проходить спочатку через роздільник кольорів другого модуля і відбивається потім роздільником променя першого модуля на детектор. У заявці ЕР 2 093 537 описаний пристрій для визначення центрування валів, в якому перший вимірювальний модуль посилає промінь, що розходиться, падаючий на два паралельно розташованих один за одним оптичних смугових детектори другого вимірювального модуля, причому подовжній напрям детекторів вертикальний відносно до площини розбіжності променя. У всіх відмічених тут вимірювальних пристроях проводиться обчислення і оцінка відповідної точки падіння світлового променя на поверхню детектора. Із заявки DE 40 41 723 А1 відомий пристрій для визначення положення вимірювальної точки щодо початкової точки для здійснення управління або контролю свердлення отвору, що 1 UA 114797 C2 5 10 15 20 25 30 35 40 45 50 55 60 виявляє декілька вимірювальних позицій, розташованих в отворі або на головці бура і що мають відповідно по одній камері з маркуванням, причому кожна камера знімає маркування камери, розташованої поряд з нею, або вимірювальну позицію. Із заявки WO 2010/042039 Α1 відомий пристрій для вимірювання центрування валів, в якому кожен з двох вимірювальних модулів оснащений встановленою на корпусі камерою, причому на зверненій до іншого модуля стороні корпусу розташований оптичний зразок, що знімається камерою, що знаходиться навпроти. На стороні корпусу, що містить зразок, є при цьому отвір, через який відображається зразок, розташований навпроти. При альтернативному виконанні один з двох модулів оснащений лише камерою, але не містить зразка, тоді як інший модуль не має камери, проте містить об'ємний зразок. У заявці ЕР 1 211 480 А2 описаний пристрій для вимірювання центрування валів, в якому перший вимірювальний модуль оснащений джерелом світла, що направляє світловий промінь на другий вимірювальний модуль, що містить матову пластинку; віддалена від першого вимірювального модуля сторона матової пластинки проектується за допомогою відповідної оптики на детектор зображення, що також є частиною другого вимірювального модуля. У заявках DЕ 101 43 812А1 і DE 101 17 390 А1 описаний пристрій для вимірювання центрування валів, у якому перший вимірювальний модуль містить світлове джерело для формування світлового променя, що розходиться, а розташований напроти другий вимірювальний модуль містить оптичну систему часткового віддзеркалення із зворотною матовою пластинкою і камеру, яка за допомогою первинної світлової плями від променя, витікаючого безпосередньо від світлового джерела і за допомогою вторинної світлової плями від променя, відбитого від оптичної системи часткового віддзеркалення, що відображає, і від рефлектора, розташованого на лицьовій стороні першого вимірювального модуля, знімає віддалену від першого вимірювального модуля сторону матової пластинки. Фірма Всите Камсорік ЕМБХ, розташована за адресою: 38108, Брауншвейг, пропонує лазерний приймач випромінювання для механічних вимірювань під маркою LaserTrac. Задачею даного винаходу є створення пристрою для визначення положення двох механічних елементів щодо один одного, наприклад пристрою для вимірювання центрування валів, який буде найбільш простим у виконанні, прийнятним за ціною і може бути пристосований до інтересів замовника. Надалі планується розробка відповідного методу. У відповідність з даним винаходом ця задача вирішена завдяки пристрою згідно з пунктом формули винаходу 1 і пункту 7, а також способу згідно з пунктом формули винаходу 26. Перевага даного рішення відповідно до винаходу полягає в тому, що замість оптичного детектора, на який падає відбитий світловий пучок, використовується камера і поверхня управління, що проектується на камеру, завдяки чому з'явилася можливість створення найбільш простої системи, пристосовуваної до потреб споживача. Так, наприклад, як камера може використовуватися розроблений для кінцевого споживача масовий продукт, такий як фотокамера або смартфон, який можна придбати за прийнятну ціну і який з різних причин, можливо, вже є в наявності у користувача. Перевагою такою виконання пристрою полягає в тому, що камера направлена на сторону поверхні управління, звернену до системи відбивачів. Відповідно до форми виконання винаходу, камера може вільно переміщатися відносно обох вимірювальних модулів, щоб забезпечити відображення поверхні управління на камеру. Відповідно до альтернативної форми виконання, камера може бути виконана як частина вимірювального модуля, оснащеного засобами для формування світлового пучка, або розташовуватися на цьому вимірювальному модулі. Переваги розробки очевидні із залежних пунктів формули винаходу. Далі приклади винаходу пояснюються за допомогою креслень, що додаються, причому Фіг. 1 - вигляд збоку, в аксонометричній проекції першого прикладу пристрою для визначення положення елементів відповідно до винаходу; Фіг. 2 - фронтальний вигляд поверхні управління пристрою, зображеного на Фіг. 1; Фіг. 3 - вимірювальний модуль пристрою, оснащений поверхнею управління у момент практичного використання, вигляд в аксонометричній проекції; Фіг. 4 - схемне зображення іншої форми виконання пристрою для визначення положення об'єкта; і Фіг. 5 - схемне зображення можливого процесу коректування аксонометричного спотворення проекції поверхні управління на камеру за допомогою закону випромінювання; і Фіг. 6 приклад поверхні управління, оснащеної QR-кодом. На Фіг. 1-3 зображений перший приклад пристрою відповідно до винаходу для визначення центрування першого вала 10 (не показаною) машин і другого вала 12 (не показаною) машин 2 UA 114797 C2 5 10 15 20 25 30 35 40 45 50 55 60 щодо один одного. Пристрій включає перший вимірювальний модуль 14, що містить елемент 16, закріплюваний на периферійній поверхні першого вала 10, і другий вимірювальний модуль 18, що містить елемент 20, закріплюваний на периферійній поверхні другого вала12. Обидва вали 10 і 12 розташовуються один за одним, по можливості співвісно базисній осі 26, причому пристрій, що містить вимірювальні модулі 14 і 18. служить для визначення кутового і/або паралельного зсуву щодо базисної осі 26 або щодо один одного. Пристрій, як правило, оснащений засобами для відображення результатів кутового або паралельного зсуву (на кресленнях не зображено). Перший вимірювальний модуль 14 містить світлове джерело 24 для формування світлового пучка 28 і коліматор (зображення відсутнє.) для формування колімованого світлового пучка 28, а також поверхня управління 34 і камеру 36 для записування зображень поверхні управління 34. Камера 36 містить оптику 35 для відображення поверхні управління 34 на датчик камери (зображення відсутнє). Камера 36 може бути, наприклад, розташована збоку під нахилом до поверхні управління 34, щоб не перешкоджати падінню світлового променя, що посилається з вимірювального модуля 18, принаймні в центральній частині поверхні управління 34. Поверхня управління 34 звернена до другого вимірювального модуля 18, якщо обидва вимірювальні модулі 14 і 18 знаходяться в одному вимірювальному положенні. Світлове джерело 24 може бути розташоване, якщо дивитися з другого вимірювального модуля 18, за поверхнею управління 34 і випромінювати світловий пучок 28 за допомогою відповідного отвору в поверхні управління. Другий вимірювальний модуль 18 оснащений системою відбивачів 38, яка містить лицьову поверхню 40, звернену до першого вимірювального модуля 14, а також другу зворотну поверхню 44, причому зворотні поверхні 42 і 44 розташовані під кутом відносного одна одної, як правило, під прямим кутом, і при цьому утворюють один з одним дах 46. У приведених прикладах система відбивачів виконана у вигляді так званої призми Порро (інше найменування пентапризма з дахом), причому обидві паралельні бічні поверхні призми утворюються конгруентними прямокутними трикутниками, які сполучені обмежувальними площинами, розташованими вертикально відносно до поверхонь трикутників, при цьому дах 46 розташований головним чином тангенціально відносно до периферійних поверхонь валів 10 і 12. Лицьова поверхня 40 виконана у вигляді відзеркалювальної поверхні для світлового пучка 28, причому перша частина 28' світлового пучка відбивається лицьовою поверхнею 40 у напрямку до поверхні управління 34, тоді як друга частина 28" світлового пучка 28 передасться через лицьову поверхню 40 у напрямку до першої зворотної поверхні 42, що забезпечує її віддзеркалення від першої зворотної поверхні 42 до другої зворотної поверхні 44 і подальше віддзеркалення через лицьову поверхню 40 у напрямку до поверхні управління 34. У прикладі на Фіг. 1 і 2 точки падіння (тобто світлові плями) світлового пучка 28' або 28" на поверхні управління 34 позначаються як WV або PV. Коефіцієнт віддзеркалення лицьовою поверхнею 40 світлового пучка 28 вибирається так, щоб забезпечити різницю інтенсивності обох відбиваних світлових пучків 28' і 28", завдяки чому можна буде розрізнити обидві точки падіння WV і PV на поверхні управління 34. Згідно зі зміненою формою виконання система на Фіг. 1 і 2 може містити світлове джерело 24, яке разом зі світловим пучком 28 посилає другий світловий пучок 30 (на Фіг. 1 представлено в заштрихованому вигляді), причому обидва світлові пучки 28 і 30 прямують в основному в один бік, але розрізняються спектрально (наприклад, світлове джерело 24 може бути виконане у вигляді двочастотного лазерного діода, що посилає світловий пучок в 660 нм в червоному діапазоні, а світловий пучок в 780 нм. У інфрачервоному діапазоні; як альтернатива світлове джерело 24 може містити два різноколірні лазерні діоди). В цьому випадку лицьова поверхня 40 систем відбивачів 38 виконана у вигляді роздільника кольорів, причому відносно першого світлового пучка 28 у неї переважає функція відбивача в порівнянні з другим пучком 30, а відносно другого світлового пучка 30 у неї переважає функція передавача в порівнянні з першим світловим пучком. В цьому випадку відбитий світловий пучок, позначений на Фіг. 1 як 28", відповідає другому світловому пучку 30, після його передачі лицьовою поверхнею 40 і віддзеркалення обома зворотними поверхнями 42 і 44. Відбитий світловий пучок, позначений на Фіг. 1 як 28'. відповідає в цьому випадку першому світловому пучку 28, відбитому від лицьової поверхні 40. Таким чином, обидві точки падіння WV і PV розрізняються за своїм спектральним складом і можуть бути легко розпізнані кольорочутливою камерою 36. У системі, представленій на Фіг. 1 і 2, точка падіння WV відбитого світлового пучка 28" на лицьову поверхню 40 є орієнтиром для визначення кутового зсуву обох валів 10 і 12, а точка 3 UA 114797 C2 5 10 15 20 25 30 35 40 45 50 55 60 падіння PV відбитого світлового пучка 28" на обох зворотних поверхнях 42 і 44 є орієнтиром для визначення паралельного зсуву обох валів 10 і 12. За поверхнею управління 34 (якщо дивитися від другого вимірювального модуля 18) перший вимірювальний модуль 14 містить корпус 32, який оснащений джерелом світла 24 і відповідною електронікою. Одна з переваг - полягає, в тому, що джерело світла 24 є таким, що поперемінно включається, що дозволяє утримувати схильність коливанням па низькому рівні. До того ж корпус 32 оснащений джерелом струму (батарея або акумулятор) для джерела світла 24 і містить систему управління режимом електроживлення. В цілому корпус 32 не повинен по товщині істотно перевищувати кронштейни, передбачені для кріплення на додатковому елементі 16 (не показано на Фіг. 1). Перший вимірювальний модулі. 14 може включати інклінометр, що дозволяє визначити кут нахилу першого вимірювального модуля 14 і, відповідно, положення кута повороту вала 10, оснащеного першим вимірювальним модулем 14, Такий інклінометр 31 з дисплеєм 33 може бути, наприклад, вбудований в корпус 32, див. Фіг. 1 і 2. Інклінометр 31 може бути, наприклад, виконаний у формі MF.MS-інклінометр. Одна з переваг виконання першого вимірювального модуля полягає в можливості направити світловий пучок або світлові пучки 28 і 30, без проміжного включення елемента, що відображає, безпосередньо на систему відбивачів 38 другого вимірювального модуля 18, тобто між світловим джерелом 24 і системою відбивачів не встановлюються ніякі елементи, що відображають. Згідно з Фіг. 2 поверхня управління 34 містить оптичні марки 50, які наприклад, можуть бути виконані у формі хрестиків, що полегшує, оцінку записаних камерою 36 зображень поверхні управління 34. Для того, щоб оптичні марки 50 були видні і в темноті, може бути використане додаткове джерело світла, наприклад діод 23 на камері 36. Як альтернатива може бути передбачене заднє підсвічування 25 поверхонь управління 34. При цьому на матову поверхню (зі скла або пластику) можна наклеїти металеву плівку з вирізами, причому в цьому випадку через корпус 32 додатково поступатиме розсіяний білий світ. Одна з переваг полягає в достатньо рівному виконанні поверхні управління 34. Згідно з Фіг. 1 і 3 камера 36 може бути зміщена убік або розташовуватися в перекинутому положенні щодо поверхні управління 34. При цьому камера 36 може вмонтовуватися внизу на додатковому елементі 16 (який може, наприклад, бути пристроєм натягнення ланцюга). При цьому камера 36 направлена так, щоб забезпечити по можливості повне відображення поверхні управління 34 на датчику камери і не допустити при цьому затінювання відбитих світлових пучків 28' і 28". При цьому додатково може бути передбачено екрануючий пристрій для розсіяного світла (зображення відсутнє), який можна також успішно використовувати для механічної стабілізації камери 36 і поверхні управління 34. Камера 36 може бути виконана, наприклад, у вигляді компактної камери, смартфона або камери мобільного телефона. Одна з переваг полягає в тому, що оптика 35 є об'єктивом з постійною або змінною фокусною відстанню. Перевагою також є, що дозвіл датчика камери складає мінімум 8 мегапікселів. Камера працює переважно в макродіапазоні. Якщо камера виконана у вигляді смартфона, то дисплей смартфона може використовуватися як графічний інтерфейс користувача (GUI); у інших випадках для навігації може використовуватися додатковий прилад подібного роду, такий як смартфон або планшет. При цьому може також застосовуватися голосове управління з використанням навушників або очікувані в 2013 році окуляри Google Glass. Оцінка отриманих за допомогою камери зображень може здійснюватися таким чином: метою оцінки з визначення координат центру точок падіння BV і PV світлових пучків 28' і 28". При цьому спочатку проводиться корекція записаного зображення, тобто виправлення перспективного спотворення, викликаного бічним закиненим положенням камери 36 і спотворень оптичної системи. Це може, наприклад, здійснюватися за допомогою оптичних марок 50, "зовнішні координати" яких точно відомі. Точка падіння світлових пучків 28' і 28" може бути виділена на підставу кольору заднього фону, що приводить до скорочення області для визначення центральної крапки. Потім проводиться визначення центральної точки за допомогою знаходження центру інерції. Оскільки зовнішні координати оптичних марок точно відомі, можна провести перерахунок в координати пікселя, завдяки чому можна визначити центр точок падіння світлових пучків WV і PV в зовнішніх координатах. Ще однією можливістю є застосування закону випромінювання для обчислення координат точок падіння, як це схематично зображено на Фіг. 5 стосовно точки падіння PV. При цьому користуються горизонтальною точкою сходу в перспективі VP11 і вертикальною точкою сходу в перспективі VPV. 4 UA 114797 C2 5 10 15 20 25 30 35 40 45 50 55 60 Можна також обчислити середній діаметр точок падіння світлових пучків PV і WV і використовувати його для оцінки відстані між світловим джерелом і системою відбивачів, тобто між першим вимірювальним модулем 14 і другим вимірювальним модулем 18. Якщо перший вимірювальний модуль 14, оснащений дисплеем 33, виявляє кут нахилу, вимірюваний інклінометром 31, то камера 36 має переважно функцію оптичного прочитування OCR, що дозволяє визначати величину цього кута. Як альтернатива можлива передача величини кута безпосередньо на камеру 36, що може здійснюватися, наприклад, за допомогою каналу Bluetooth. Якщо камерою 36 є смартфон, то, як правило, вбудований в нього інклінометр 29 може використовуватися для визначення кута нахилу. При оцінці записаних камерою зображень може, наприклад, проводиться корекція систематичних погрішностей відображення, які можуть бути викликані, наприклад, ребром призми 46. Оцінка зображень може здійснюватися в блоці обробки результатів, схематично представленому в пункті 22, який може бути частиною камери, особливо, якщо мова йде про смартфон, який вже за визначенням має високу обчислювальну потужність. Перед початком вимірювання проводиться юстирування вимірювальних модулів 14 і 18 щодо один одного, що забезпечує падіння світлових пучків 28' і 28" приблизно на середину поверхні управління 34. Для цієї мети другий вимірювальний модуль 18 може бути оснащений пристроєм регулювання по висоті (зображення відсутнє) для регулювання положення другого вимірювального модуля 18 в поперечному напрямі щодо вала 12, а також пристроєм регулювання кута, використовуваним для перекидання другого вимірювального модуля 18 щодо поперечного напряму вала 12 і для переміщення другого вимірювального модуля 18 в поперечному напрямі. Після проведеного юстирування обох вимірювальних модулів 14 і 18 щодо один одного на підставі позиції падіння відбитих світлових пучків 28' і 28" можна зробити висновок про розузгодження обох валів 10 і 12 щодо один одного, якщо обидва вали 10 і 12 з розташованими на них вимірювальними модулями 14 і 18 обертаються навколо осі 26, причому переміщення відповідної точки падіння простежується і оцінюється залежно від кута повороту (який у свою чергу визначається за допомогою функції інклінометра) в принципі відомим способом. Це дозволяє зробити висновки про вертикальний зсув, горизонтальний зсув і кутовий зсув валів 10 І 12 (такий метод описаний наприклад в заявці DE 39 11 307 А1 стосовно окремою світлового пучка). Якщо система відбивачів виконана у вигляді трипель-призми, то позиція падіння світлового пучка 28" па зворотних поверхнях 42 і 44 показує, паралельний зсув в обох напрямах. Після визначення розузгодження проводиться юстирування валів 10 і 12 в певній кутовій позиції, причому під час юстирування валів шляхом вимірювань встановлюється оптимальний час для коректування розузгодження. Такий метод також описаний, наприклад в заявці DK 39 11 307 А1. При використанні трипель-призми юстирування валів може проводитися, наприклад, при знаходженні обох вимірювальних модулів 14 і 18 в положенні "0 годин". При використанні призми Порро (званою також "призмою з дахом") юстирування може проводитися, наприклад, в положенні "3 години" або "9 годин". Зазвичай під час вимірювання центрування і під час юстирування валів камера повинна з достатньо високою інтенсивністю здійснювати запис і оцінку зображень поверхні управління 34, причому в секунду може створюватися і оброблятися близько п'яти зображень. Якщо як камера виступає смартфон, то створення і оцінка зображень може здійснюватися у формі відповідного застосування. Як альтернатива безперервного запису зображень може бути вибраний такий режим запису, при якому процес створення зображень протікає залежно від актуального кута нахилу, наприклад, завжди при зміні значення куга на певну величину, наприклад, на 1°. Пристрій для центрування може як опція містити навушники Bluetooth, які оператор може носити при юстируванні валів і які використовуються для безпровідного прийому актуальних значень зсуву, виявлених блоком обробки результатів 22 камери 36, представленою смартфоном, таким чином, забезпечується акустична передача відповідних даних операторові, зайнятому юстируванням валів. Це є перевагою, оскільки під час юстирування операторові важко читати показання на дисплеї смартфона 36. При цьому навушники можуть також використовуватися для здійснення голосового управління по каналу Bluetooth смартфона 36. Як альтернатива, оператор може використовувати другий смартфон або планшет для забезпечення зручнішого способу прочитання інформації з дисплея, виступаючого в ролі 5 UA 114797 C2 5 10 15 20 25 30 35 40 45 50 55 60 камери смартфона 36, за допомогою каналу Bluetooth (наприклад, за допомогою видаленого адміністрування з мовним введенням команд VNC), причому за допомогою сенсорної навігації смартфоном 36 можна також управляти з другого смартфона або планшета, див. також заявку WO 97/36146. Як правило, поверхня, що відображається, має розміри 40 мм X 40 мм; в цьому випадку один піксель відповідає приблизно 20 μm, якщо роздільна здатність камери складає 8 мегапікселів (що відповідає вертикальній роздільній здатності близько 2500 пікселів). При використанні компактної камери, наприклад в 16 мегапікселях, може бути досягнута роздільна здатність приблизно в 7 μm. В принципі, можна також використовувати камеру із спеціальною оптикою, у випадку із смартфоном може застосовуватися передвключена лупа. Дані вимірювань поверхні управління 34 які підлягають відображенню, можуть бути скорочені до розмірів 20 Ч 20 або 30×30 мм. При цьому цілком можлива безпровідна передача зображень камери (наприклад, за допомогою WI-FI) наприклад, на якусь мобільну платформу. Для цього можна використовувати спеціальну SD-карту. Відповідно до зміни форми виконання, зображеної на Фіг. 1-3, камера 36 може бути виконана у вигляді "вільної камери", рухомої відносно обох вимірювальних модулів 14 і 18, оператор для здійснення запису зображень поверхні управління 34 може тримати її в руках або поставити на штатив. При цьому камера або працює в макро-діапазоні, або розташовується на відповідній відстані від поверхні управління 34 для проведення запису, або, там, де це неможливо, а також у разі інших побажань камера може використовуватися з телеоб'єктивом, що дозволяє записувати зображення з відстані більш одного метра. На Фіг. 4 представлено ще один варіант форми виконання, показаної на Фіг. 1-3, причому поверхня управління 134 виконана у вигляді матової пластинки, а камера 36 записує не звернену до поверхні управління сторону другого вимірювального модуля 18, як це має місце у формі виконання, показаної на Фіг. 1-3, а віддалену від другого вимірювального модуля 18 сторону поверхні управління 134. При цьому камера 36, якщо дивитися від другого модуля 18, розташована за матовою пластинкою 134. У прикладі, представленому на Фіг. 4, камера 36 міцно пов'язана з корпусом 32 першого вимірювального модуля 14. При використанні стандартного смартфона відстань між камерою і матовою пластинкою склала б 50-60 мм. Цю відстань можна скоротити, забезпечивши камеру лінзою насадки (ширококутним об'єктивом або лупою). Тут також можливо встановити комунікацію між мобільним елементом системи управління і камерою за допомогою безпровідного каналу, наприклад Bluetooth. При формі виконання, показаній на Фіг. 4, також можливе використання екрануючого пристрою для розсіяного світла (зображення відсутнє). Перевагою форми виконання, зображеної на Фіг. 4 є наявність двокольорового світлового джерела і лицьової поверхні 40, виступаючою у формі роздільника кольорів, як вже було описано у зв'язку з формою виконання на Фіг. 1-3. В принципі, камеру можна також використовувати в тих випадках, коли вона для запису зображень змонтована на першому вимірювальному модулі 14 і пов'язана з ним таким чином, що після проведення вимірювання центрування або юстирування можливий її демонтаж і використання для інших цілей. Це є перевагою особливо в тих випадках, коли в ролі камери виступає смартфон. В принципі, використання смартфона як камери має ряд переваг. Такого роду прилади дуже легко адаптувати до нових умов експлуатації, і вони мають високу продуктивність, що стосується програмування і створення графічною інтерфейсу користувача; зокрема є функції розпізнавання жестів, включення клавіатури і локалізації. Надалі оператор, зайнятий вимірюванням центрування, може використовувати прилад, правила експлуатації якого йому і без того вже знайомі. До того ж смартфони мають велику кількість портів, наприклад в області банка даних по технічному обслуговуванню; зокрема важливу роль, грають безпровідні порти, які можуть використовуватися для підключення інших мобільних операційних платформ, навушників (з відлунням і шумозаглушенням), окулярів Google Glass, вібропоясу і.т.д. У решті смартфон може використовуватися в своїй звичайній функції, якщо в даний момент за його допомогою не проводиться вимірювання центрування. Відповідно до форми виконання винаходу, поверхня управління може бути оснащена декількома, як правило, розподіленими по поверхні управління залежно від поля зображення, двомірними оптичними кодами, наприклад кодами QR, нанесеними на поверхню управління і службовцями для кодування інформації/даних про поверхню управління або про вимірювальні модулі, оснащеними поверхнею управління. Мова тут може йти, наприклад, про серійний номер 6 UA 114797 C2 5 10 15 вимірювального модуля, габарити поверхні управління по напрямах X і Υ (наприклад, в мм.), коефіцієнтах корекції, що мають відношення до точності або до погрішностей друкуючого пристрою, використовуваного для нанесення на поверхню управління (наприклад, подовження або стиснення по напрямах X і Υ), до кількості кодів на поверхні управління, до положення відповідного коду в полі зображення (номер рядка, номер колонки), а також до відстані тим або іншим кодом і початком координат поверхні управління (наприклад, в μm). Окремі коди можуть розташовуватися, межуючись один з одним, що дозволяє покрити всю поверхню управління, як показано, наприклад на Фіг. 6, де зображено 4 коди: 60А, 60В, 60С, 60 D. Кількість і роздільна здатність кодів повинні бути оптимізовані відповідно до роздільної здатності друкуючого пристрою і камери. Замість кодів QR можна використовувати інші пропрієтарні графічні коди. Наявність графічних кодів на поверхні управління має наступні переваги: Не обов'язково фотографувати всю поверхню відбивача разом із захисним контуром, що полегшує роботу користувача. Існує можливість реконструкції кодів в цілях створення необхідного зображення, що забезпечує достатню кількість точок для лінеаризації зображення поверхні управління (внутрішні і зовнішні параметри). Завдяки певним маркам коди на поверхні управління можуть бути ідентифіковані як такі. Можлива вища точність при визначенні позиції падіння. Може бути проведена корекція поверхні управління з урахуванням точності використовуваного для нанесення друкуючого пристрою. 20 ФОРМУЛА ВИНАХОДУ 25 30 35 40 45 50 55 60 1. Пристрій для визначення положення першого механічного елемента (10) і другого механічного елемента (12) відносно один одного, що містить перший вимірювальний модуль (14), який встановлений на першому механічному елементі, і другий вимірювальний модуль (18), що встановлений на другому механічному елементі, а також блок обробки результатів вимірювання (22), причому перший вимірювальний модуль оснащений засобами (24) для формування світлового пучка (28), поверхнею управління (34) для розсіювання падаючого на поверхню управління світла (WV і PV), камерою (36) для запису зображень поверхні управління, а другий вимірювальний модуль містить систему відбивачів (38), звернену до першого вимірювального модуля, якщо вимірювальні модулі встановлені на відповідних механічних елементах для віддзеркалення світлового пучка (28’ і 28”) на поверхню управління, при цьому на підставі графічних даних, що передані камерою, блок обробки результатів вимірювання виконаний з можливістю визначення на поверхні управління точки падіння світлового пучка, відбитого системою відбивачів, і на підставі цього визначити положення першого і другого механічних елементів відносно один одного. 2. Пристрій за п. 1, який відрізняється тим, що камера (36) направлена на сторону поверхні управління (34), звернену до системи відбивачів. 3. Пристрій за п. 2, який відрізняється тим, що камера (36) зміщена у бік відносно поверхні управління (34). 4. Пристрій за п. 3, який відрізняється тим, що камера (36) перекинута відносно поверхні управління (34). 5. Пристрій за п. 1, який відрізняється тим, що поверхня управління виконана у вигляді матової пластинки (134), причому камера (36) направлена на віддалену від системи відбивачів сторону матової пластинки. 6. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що перший вимірювальний модуль (14) оснащений засобами (33) для знімного закріплення камери (36). 7. Пристрій для визначення положення першого механічного елемента (10) і другого механічного елемента (12) відносно один одного, який містить перший вимірювальний модуль (14), що встановлений на першому механічному елементі, і другий вимірювальний модуль (18), що встановлений на другому механічному елементі, а також камеру (36) і блок обробки результатів вимірювання (22), причому перший вимірювальний модуль оснащений засобами (24) для формування світлового пучка (28, 30) і поверхнею управління (34) для розсіювання падаючого на поверхню управління світла (WV, PV), а другий вимірювальний модуль містить систему відбивачів (38), яка звернена до першого вимірювального модуля, якщо вимірювальні модулі розміщені на відповідних механічних елементах так, що можуть відображати світловий пучок на поверхню управління, при цьому камера виконана з можливістю руху відносно обох вимірювальних модулів та придатна для запису зображення поверхні управління, та на підставі графічних даних, що передані камерою, блок обробки результатів вимірювання виконаний з можливістю визначення на поверхні управління точки падіння світлового пучка (28', 28"), 7 UA 114797 C2 5 10 15 20 25 30 35 40 45 50 55 60 відбитого системою відбивачів, а виходячи з цього визначити положення першого і другого механічних елементів відносно один одного. 8. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що система відбивачів (38) містить першу зворотну поверхню 42 і другу зворотну поверхню (44), які розташовані під кутом відносного одна одної з можливістю відображення світлового пучка від першої зворотної поверхні на другу, а звідти у напрямку до поверхні управління (34). 9. Пристрій за п. 8, який відрізняється тим, що перша (42) і друга (44) зворотні поверхні системи відбивачів (38) розташовані вертикально відносно одна одної. 10. Пристрій за п. 9, який відрізняється тим, що система відбивачів (38) виконана у формі призми. 11. Пристрій за п. 10, який відрізняється тим, що система відбивачів (38) виконана у формі призми Порро або трипель-призми. 12. Пристрій за п. 8-11, який відрізняється тим, що звернена до першого вимірювального модуля (14) поверхня (40) системи відбивачів (38) призначена для того, щоб відображати частину світлового пучка до поверхні управління, і передавати частину світлового пучка до першої зворотної поверхні. 13. Пристрій за п. 1-11, який відрізняється тим, що світловий пучок представлений першим світловим пучком (28), а засоби для формування першого світлового пучка призначені також для формування другого світлового пучка (30), причому обидва світлові пучки виконані з прямуванням в основному в один бік, але розрізняються спектрально, причому звернена до першого вимірювального модуля поверхня (40) системи відбивачів (38) виконана у вигляді роздільника кольорів, і при цьому відносно першого світлового пучкау неї переважає функція відбивача в порівнянні з другим пучком, а відносно другого світлового пучка у неї переважає функція передавача в порівнянні з першим світловим пучком, причому передбачена як мінімум перша зворотна поверхня (42) системи відбивачів, призначена для віддзеркалення другого світлового пучка, переданого через поверхню, звернену до першого вимірювального модуля. 14. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що як перший механічний елемент виступає перший вал (10), а як другий механічний елемент виступає другий вал (12), причому вимірювальний модуль (14) розташовано на периферійній поверхні першого вала, а другий вимірювальний модуль (18) розташовано на периферійній поверхні другого вала. 15. Пристрій за п. 14, який відрізняється тим, що блок обробки результатів вимірювання (22) виконаний з можливістю визначення кутового зсуву, а також вертикального і горизонтального зсувів валів на підставі графічних даних, записаних при різних положеннях кута повороту валів (10 і 12). 16. Пристрій за п. 11 і 15, який відрізняється тим, що дах (46) призми (38) розташований головним чином тангенціально відносно до периферійної поверхні валів. 17. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що камера містить об'єктив (35) з фіксованою фокусною відстанню. 18. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що поверхня управління (34) оснащена оптичними марками (50). 19. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що блок обробки результатів (22) виконаний з можливістю проведення корекції графічних зображень, що передані камерою (36), з урахуванням її перекинутого положення відносно до поверхні управління (34). 20. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що перший вимірювальний модуль (14) містить інклінометр (27). 21. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що камера (36) містить інклінометр (29). 22. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що перший вимірювальний модуль (14) має заднє підсвічування (25) для поверхні управління (33). 23. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що камера (36) містить засоби (23) для освітлення поверхні управління (34). 24. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що камера (36) виконана у вигляді смартфона. 25. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що поверхня управління (34) оснащена декількома, розподіленими по ній графічними кодами (60А, 60В, 60С, 60D) для кодування даних, пов'язаних з поверхнею управління і/або вимірювальним модулем, оснащеним поверхнею управління. 26. Спосіб визначення положення першого механічного елемента (10) і другого механічного елемента (12) відносно один одного, причому перший вимірювальний модуль (14), 8 UA 114797 C2 5 10 встановлюють на першому механічному елементі, а другий вимірювальний модуль (18) встановлюють на другому механічному елементі, за допомогою першого вимірювального модуля формують світловий пучок (28, 30), а за допомогою системи відбивачів (38) другого вимірювального модуля світловий пучок відбивається на поверхню управління (134) першого вимірювального модуля, вільно рухливу камеру позиціонують відносно обох вимірювальних модулів, і записують щонайменше одне зображення поверхні управління, і проводять оцінку щонайменше одного зображення, що дозволяє визначити на поверхні управління точку падіння (WV, PV) відбитого системою відбивачів світлового пучка, і на основі цього визначають положення першого і другого механічного елементів відносно один одного. 27. Спосіб за п. 26, який відрізняється тим, що камеру (36) направляють на звернену до системи відбивачів (38) сторону поверхні управління (134). 28. Спосіб за п. 26, який відрізняється тим, що поверхню управління (134) виконують у вигляді матової пластинки, а камеру (36) направляють на віддалену від системи відбивачів сторону матової пластинки. 9 UA 114797 C2 10 UA 114797 C2 11 UA 114797 C2 Комп’ютерна верстка О. Гергіль Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 12
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01N 11/14, G01B 11/27
Мітки: елементів, положення, механічних, пристрій, визначення
Код посилання
<a href="https://ua.patents.su/14-114797-pristrijj-dlya-viznachennya-polozhennya-mekhanichnikh-elementiv.html" target="_blank" rel="follow" title="База патентів України">Пристрій для визначення положення механічних елементів</a>
Пристрій для визначення взаємного положення двох по суті плоских елементів
Номер патенту: 89431
Опубліковано: 25.01.2010
Автори: Куртц Райнер, Грумм Харальд, Каннон Марк, Хюбш Вольфрам
Мітки: пристрій, суті, двох, положення, взаємного, визначення, плоских, елементів
Формула / Реферат:
1. Пристрій для визначення взаємного положення в площині X-Y двох по суті плоских елементів, розташованих по суті один над іншим на відстані один від одного у напрямі Z, що містить щонайменше один розташований між вказаними елементами оптичний реєструючий прилад, що дозволяє реєструвати щонайменше по дві точки на звернених одна до одної поверхнях елементів, і блок обробки, виконаний з можливістю аналізу зображень точок відносно їх взаємного...
Пристрій і спосіб для визначення положення двох зчленованих валів щодо один одного
Номер патенту: 110377
Опубліковано: 25.12.2015
Автори: Конечний Волкер, Вегенер Мартін, Гласер Бернхард, Кану Гіанлука
МПК: G01B 11/14, G01P 3/36, G01M 11/00, G01M 13/00, G01B 11/27
Мітки: пристрій, одного, визначення, спосіб, зчленованих, двох, положення, валів
Формула / Реферат:
1. Пристрій для визначення положення першого вала (10) і сполученого з першим валом за допомогою зчленування (14) другого вала (12) щодо один одного, що містить один вимірювальний модуль, який встановлюється на периферійній поверхні першого вала, і другий вимірювальний модуль, що встановлюється на периферійній поверхні другого вала, а також блок обробки результатів (30), причому як мінімум один з двох вимірювальних модулів оснащений засобами...
Пристрій для контролю стабільності положення елементів споруди
Номер патенту: 10399
Опубліковано: 15.11.2005
Автори: Боровий Валентин Олександрович, Шульц Роман Володимирович, Бурачек Всеволод Германович, Крисенко Максим Вікторович, Бойко Ігор Петрович
МПК: G02B 13/08
Мітки: споруди, стабільності, контролю, елементів, положення, пристрій
Формула / Реферат:
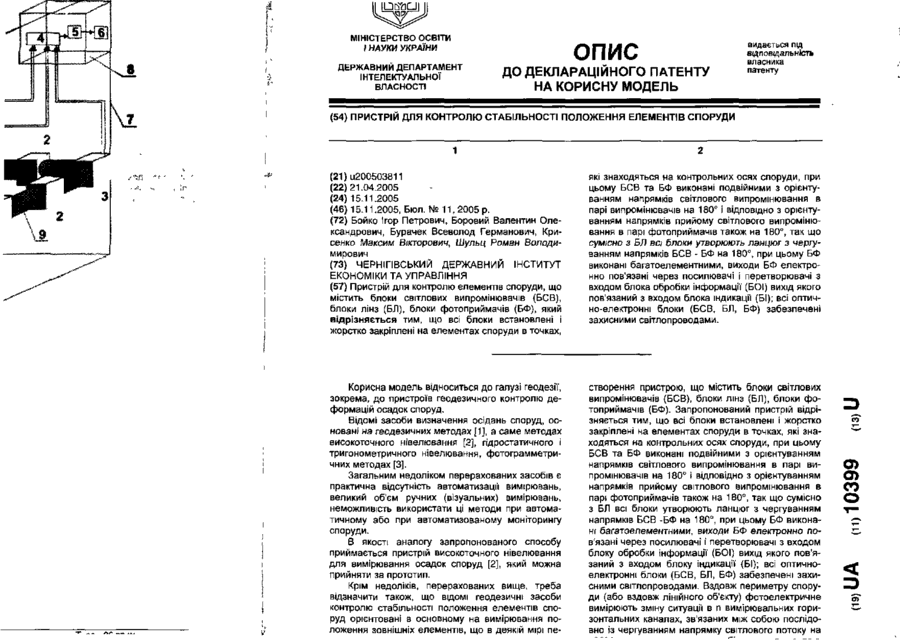
Пристрій для контролю елементів споруди, що містить блоки світлових випромінювачів (БСВ), блоки лінз (БЛ), блоки фотоприймачів (БФ), який відрізняється тим, що всі блоки встановлені і жорстко закріплені на елементах споруди в точках, які знаходяться на контрольних осях споруди, при цьому БСВ та БФ виконані подвійними з орієнтуванням напрямків світлового випромінювання в парі випромінювачів на 180° і відповідно з орієнтуванням напрямків...
Пристрій для контролю стабільності положення елементів споруди
Номер патенту: 80987
Опубліковано: 26.11.2007
Автори: Бурачек Всеволод Германович, Бойко Ігор Петрович, Шульц Роман Володимирович, Крисенко Максим Вікторович, Боровий Валентин Олександрович
МПК: G01C 5/00
Мітки: пристрій, контролю, положення, споруди, елементів, стабільності
Формула / Реферат:
Пристрій для контролю положення елементів споруди, що містить блоки світлових випромінювачів (БСВ), блоки лінз (БЛ), блоки фотоприймачів (БФ), який відрізняється тим, що всі вказані блоки встановлені і жорстко закріплені на елементах споруди в точках, які знаходяться на контрольних осях споруди, при цьому БСВ та БФ виконані подвійними з орієнтуванням напрямків світлового випромінювання в парі випромінювачів на 180° і відповідно з...
Пристрій для контролю положення елементів інженерної споруди
Номер патенту: 82247
Опубліковано: 25.03.2008
Автори: Крисенко Максим Вікторович, Боровий Валентин Олександрович, Рябчій Владислав Валерійович, Шульц Роман Володимирович, Бурачек Всеволод Германович
МПК: G01C 5/00
Мітки: елементів, пристрій, положення, споруди, контролю, інженерної
Формула / Реферат:
1. Пристрій для контролю положення елементів інженерної споруди, який містить фотоелектричні канали з джерелами світла, об'єктивами, багатоелементними фотоприймачами, що утворюють фотоелектричний ланцюжок, елементи ланцюжка змонтовані в блоках, які жорстко встановлені на споруді, причому джерела світла електрично сполучені з генераторним блоком, багатоелементні фотоприймачі електрично сполучені з блоком комутації, генераторний блок та блок...
Попередній патент: Спосіб підвищення ефективності трансдукції
Наступний патент: Пристрій для визначення положення механічних елементів
Випадковий патент: Соковижималка