Спосіб векторного регулювання струму в асинхронному електроприводі з трифазним автономним інвертором струму на тиристорах, що замикаються
Номер патенту: 30471
Опубліковано: 25.02.2008
Автори: Волков Олександр Васильович, Косенко Ігор Олександрович
Формула / Реферат
1. Спосіб векторного регулювання струму в асинхронному електроприводі з трифазним автономним інвертором струму на тиристорах, що замикаються, який полягає у тому, що задають необхідні значення намагнічувальної і активної проекцій узагальненого вектора статорного струму двигуна відповідно на осі абсцис і ординат ортогональної координатної системи, що обертається, яка орієнтована віссю абсцис за узагальненим вектором потокозчеплення ротора асинхронного двигуна (1), контролюють поточні значення косинуса і синуса від аргументу узагальненого вектора потокозчеплення ротора асинхронного двигуна, за допомогою яких визначають із зворотних координатних перетворень за необхідними значеннями намагнічувальної і активної проекцій узагальненого вектора статорного струму задані значення проекцій цього вектора на осі абсцис і ординат нерухомої ортогональної координатної системи, яка орієнтована віссю абсцис за геометричною віссю обмотки статора фази "а" двигуна, від якої здійснюють відлік аргументів узагальнених векторів, контролюють поточні значення проекцій узагальненого вектора статорного струму двигуна на осі абсцис і ординат нерухомої ортогональної координатної системи, через які обчислюють відхилення проекцій узагальненого вектора статорного струму на осі абсцис і ординат нерухомої ортогональної координатної системи у вигляді різниці згаданих заданих і поточних значень проекцій узагальненого вектора статорного струму на відповідні осі вказаної нерухомої ортогональної координатної системи, контролюють вхідний струм автономного інвертора струму (4), через який для всіх можливих комбінацій відкритих тиристорів інвертора розраховують прогнозовані значення вихідних фазних струмів автономного інвертора струму: для фаз інвертора, в яких відкриті тиристори в анодній і катодній групах, - у вигляді відповідно додатного або від'ємного значень вхідного струму інвертора, а для фази інвертора, в якій всі тиристори закриті, - у вигляді нульового значення, для всіх можливих комбінацій відкритих тиристорів інвертора обчислюють значення проекцій прогнозованих узагальнених векторів вихідного струму інвертора на осі нерухомої ортогональної координатної системи: на вісь абсцис - у вигляді розрахованого для даної комбінації прогнозованого значення вихідного струму у фазі "а" інвертора, а на вісь ординат - у вигляді поділеної на ![]() різниці значень розрахованих для даної комбінації вихідних струмів інвертора у фазах "b" і "с", для всіх можливих комбінацій відкритих тиристорів інвертора обчислюють прогнозуючий функціонал і знаходять його екстремальне значення, при цьому поточну комбінацію відкритих тиристорів автономного інвертора струму, що характеризується одночасно відкритими станами двох тиристорів в різних фазах інвертора: одного - в анодній, іншого - в катодній групі інвертора, задають відповідною вказаному екстремальному значенню прогнозуючого функціонала, а вхідний струм інвертора регулюють прямо пропорційно кореню квадратному з суми квадратів необхідних значень намагнічувальної і активної проекцій узагальненого вектора струму статора двигуна, який відрізняється тим, що розраховують модуль узагальненого вектора відхилення струму двигуна у вигляді кореня квадратного з суми квадратів обчислених відхилень проекцій статорного струму на осі абсцис і ординат нерухомої ортогональної координатної системи, обчислюють значення косинуса і синуса від аргументу узагальненого вектора відхилення струму двигуна у вигляді відповідно відношень проекцій цього вектора на осі абсцис і ординат нерухомої ортогональної координатної системи до модуля цього вектора, для всіх можливих комбінацій відкритих тиристорів інвертора розраховують значення косинуса і синуса від аргументів прогнозованих узагальнених векторів вихідного струму інвертора у вигляді помножених на
різниці значень розрахованих для даної комбінації вихідних струмів інвертора у фазах "b" і "с", для всіх можливих комбінацій відкритих тиристорів інвертора обчислюють прогнозуючий функціонал і знаходять його екстремальне значення, при цьому поточну комбінацію відкритих тиристорів автономного інвертора струму, що характеризується одночасно відкритими станами двох тиристорів в різних фазах інвертора: одного - в анодній, іншого - в катодній групі інвертора, задають відповідною вказаному екстремальному значенню прогнозуючого функціонала, а вхідний струм інвертора регулюють прямо пропорційно кореню квадратному з суми квадратів необхідних значень намагнічувальної і активної проекцій узагальненого вектора струму статора двигуна, який відрізняється тим, що розраховують модуль узагальненого вектора відхилення струму двигуна у вигляді кореня квадратного з суми квадратів обчислених відхилень проекцій статорного струму на осі абсцис і ординат нерухомої ортогональної координатної системи, обчислюють значення косинуса і синуса від аргументу узагальненого вектора відхилення струму двигуна у вигляді відповідно відношень проекцій цього вектора на осі абсцис і ординат нерухомої ортогональної координатної системи до модуля цього вектора, для всіх можливих комбінацій відкритих тиристорів інвертора розраховують значення косинуса і синуса від аргументів прогнозованих узагальнених векторів вихідного струму інвертора у вигляді помножених на ![]() відношень прогнозованих значень проекцій цих векторів відповідно на осі абсцис і ординат нерухомої ортогональної координатної системи до вхідного струму інвертора, при цьому прогнозуючий функціонал обчислюють у вигляді двох доданків, перший з яких дорівнює добутку косинусів від аргументів узагальненого вектора відхилення струму і прогнозованого узагальненого вектора вихідного струму інвертора, а другий доданок дорівнює добутку синусів від аргументів цих векторів.
відношень прогнозованих значень проекцій цих векторів відповідно на осі абсцис і ординат нерухомої ортогональної координатної системи до вхідного струму інвертора, при цьому прогнозуючий функціонал обчислюють у вигляді двох доданків, перший з яких дорівнює добутку косинусів від аргументів узагальненого вектора відхилення струму і прогнозованого узагальненого вектора вихідного струму інвертора, а другий доданок дорівнює добутку синусів від аргументів цих векторів.
2. Спосіб за п. 1, який відрізняється тим, що додатково порівнюють розраховане значення модуля узагальненого вектора відхилення струму з припустимою уставкою, при цьому, якщо значення модуля узагальненого вектора відхилення струму не перевищує вказаної уставки, то примусово зберігають незмінною і відповідною попередньому моменту часу комбінацію відкритих тиристорів автономного інвертора струму.
Текст
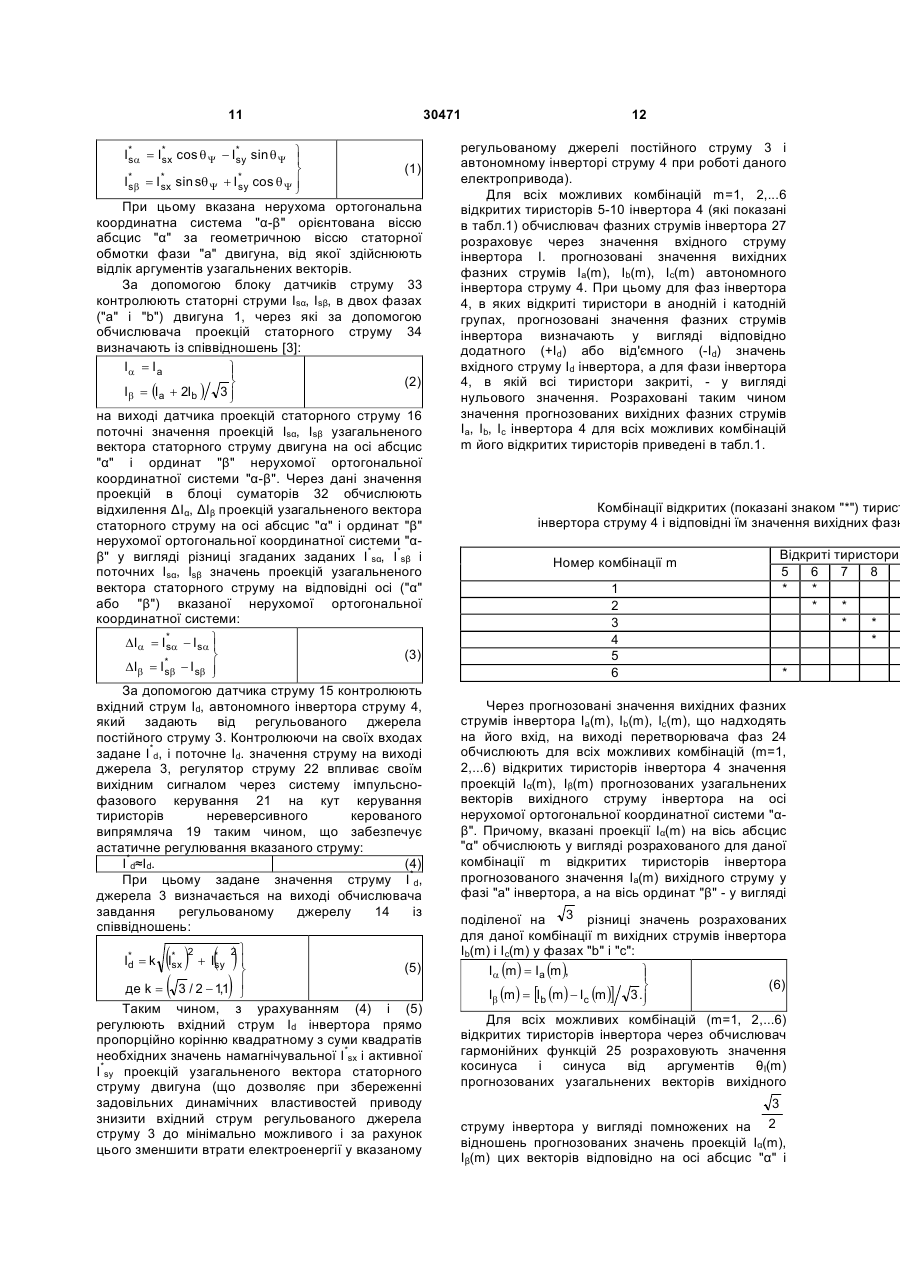
1. Спосіб векторного регулювання струму в асинхронному електроприводі з трифазним автономним інвертором струму на тиристорах, що замикаються, який полягає у тому, що задають необхідні значення намагнічувальної і активної проекцій узагальненого вектора статорного струму двигуна відповідно на осі абсцис і ординат ортогональної координатної системи, що обертається, яка орієнтована віссю абсцис за узагальненим вектором потокозчеплення ротора асинхронного двигуна (1), контролюють поточні значення косинуса і синуса від аргументу узагальненого вектора потокозчеплення ротора асинхронного двигуна, за допомогою яких визначають із зворотних координатних перетворень за необхідними значеннями намагнічувальної і активної проекцій узагальненого вектора статорного струму задані значення проекцій цього вектора на осі абсцис і ординат нерухомої ортогональної координатної системи, яка орієнтована віссю абсцис за геометричною віссю обмотки статора фази "а" двигуна, від якої здійснюють відлік аргументів узагальнених векторів, контролюють поточні значення проекцій узагальненого вектора статорного струму двигуна на осі абсцис і ординат нерухомої ортогональної координатної системи, через які обчислюють відхилення проекцій узагальненого вектора статорного струму на осі абсцис і ординат нерухомої ортогональної координатної системи у вигляді різниці згаданих заданих і поточних значень проекцій узагальненого вектора статорного струму на відповідні осі вказаної нерухомої ортогональної координатної системи, контролюють вхідний струм автономного інвертора струму (4), через який для всіх можливих комбінацій відкритих тиристорів інвертора розраховують прогнозовані значення 2 (19) 1 3 векторів вихідного струму інвертора у вигляді помножених на 3 / 2 відношень прогнозованих значень проекцій цих векторів відповідно на осі абсцис і ординат нерухомої ортогональної координатної системи до вхідного струму інвертора, при цьому прогнозуючий функціонал обчислюють у вигляді двох доданків, перший з яких дорівнює добутку косинусів від аргументів узагальненого вектора відхилення струму і прогнозованого узагальненого вектора вихідного Корисна модель відноситься до галузі електротехніки, конкретно - до частотнорегульованих асинхронних електроприводів, в яких у якості перетворювача частоти використовується трифазний автономний інвертор струму на тиристорах, що замикаються. Векторне регулювання струму в асинхронному електроприводі призначене для формування в асинхронному двигуні заданих значень намагнічувальної і активної складових (проекцій) статорного струму, що, у свою чергу, дозволяє в перехідних і сталих режимах роботи електропривода створювати необхідні значення магнітного потокозчеплення і електромагнітного моменту двигуна і, як наслідок, ефективно керувати перехідними електромеханічними процесами частотно-регульованого асинхронного електропривода. Відомий з [1] спосіб релейно-векторного керування трифазним автономним інвертором струму на тиристорах, що замикаються, полягаючий у тому, що контролюють фазні струми і напруги в трифазному навантаженні, живленому від трифазного автономного інвертора струму, через які обчислюють поточні значення узагальнених векторів струму і напруги навантаження, контролюють вхідний струм інвертора, через який розраховують для всіх можливих комбінацій відкритих станів тиристорів інвертора прогнозовані значення узагальнених векторів вихідного струму автономного інвертора струму, для всіх можливих комбінацій відкритих тиристорів інвертора розраховують прогнозовані значення узагальненого вектора напруги на навантаженні у вигляді суми трьох доданків, перший з яких дорівнює поточному значенню узагальненого вектора напруги на навантаженні, друге - з від'ємним знаком узагальненому вектору струму навантаження, поділеному на ємність конденсатора фільтра, встановлюваного на виході інвертора, і помноженому на тривалість часового інтервалу прогнозу, а третій доданок прогнозованому значенню узагальненого вектора вихідного струму інвертора, поділеному на ємність згаданого конденсатора фільтру і помноженому на тривалість часового інтервалу прогнозу. При цьому для всіх можливих комбінацій відкритих тиристорів інвертора розраховують значення прогнозуючого функціонала у вигляді різниці обчислених прогнозованих значень і заданого 30471 4 струму інвертора, а другий доданок дорівнює добутку синусів від аргументів цих векторів. 2. Спосіб за п. 1, який відрізняється тим, що додатково порівнюють розраховане значення модуля узагальненого вектора відхилення струму з припустимою уставкою, при цьому, якщо значення модуля узагальненого вектора відхилення струму не перевищує вказаної уставки, то примусово зберігають незмінною і відповідною попередньому моменту часу комбінацію відкритих тиристорів автономного інвертора струму. значення узагальненого вектора напруги навантаження, а поточну комбінацію відкритих тиристорів інвертора задають відповідною екстремальному (мінімальному) значенню вказаного прогнозуючого функціонала. Недоліком цього відомого способу керування є складність технічної реалізації. Це обумовлено, по-перше, необхідністю контролю збільшеного числа електричних параметрів режиму (зокрема, не тільки фазних струмів, але і - фазних напруг навантаження) і, по-друге, складністю обчислення прогнозуючого функціонала (для чого вимагається виконувати розрахунок трьох векторних величин: поточних значень узагальнених векторів напруги і струму навантаження, прогнозованого вектора вихідного струму інвертора). По-третє, оскільки у відомому способі безпосередньо не реалізується векторне регулювання струму навантаження (оскільки фактично здійснюється лише векторне регулювання напруги навантаження), то разом із застосуванням даного способу в частотнорегульованому асинхронному електроприводі доводиться на практиці додатково створювати необхідну систему векторного регулювання струму асинхронного двигуна. Це, у свою чергу, також помітно ускладнює при використовуванні відомого способу загальну технічну реалізацію векторного регулювання струму в асинхронному електроприводі з автономним інвертором струму на тиристорах, що замикаються. Найбільш близьким по технічній суті до запропонованого способу вибрано спосіб векторного регулювання струму в асинхронному електроприводі з трифазним автономним інвертором струму на тиристорах, що замикаються [2], полягаючий у тому, що задають необхідні значення намагнічувальної і активної проекцій узагальненого вектора статорного струму двигуна відповідно на осі абсцис і ординат ортогональної координатної системи, що обертається, яка орієнтована віссю абсцис за узагальненим вектором потокозчеплення ротора асинхронного двигуна, контролюють поточні значення косинуса і синуса від аргументу узагальненого вектора потокозчеплення ротора асинхронного двигуна, за допомогою яких визначають із зворотних координатних перетворень за необхідними значеннями намагнічувальної і активної проекцій узагальненого вектора статорного струму задані значення проекцій цього вектора на осі абсцис і 5 ординат нерухомої ортогональної координатної системи, яка орієнтована віссю абсцис за геометричною віссю обмотки статора фази "а" двигуна, від якої здійснюють відлік аргументів узагальнених векторів, контролюють поточні значення проекцій узагальненого вектора статорного струму двигуна на осі абсцис і ординат нерухомої ортогональної координатної системи, через які обчислюють відхилення проекцій узагальненого вектора статорного струму на осі абсцис і ординат нерухомої ортогональної координатної системи у вигляді різниці згаданих заданих і поточних значень проекцій узагальненого вектора статорного струму на відповідні осі вказаної нерухомої ортогональної координатної системи, контролюють вхідний струм автономного інвертора струму, через який для всіх можливих комбінацій відкритих тиристорів інвертора розраховують прогнозовані значення вихідних фазних струмів автономного інвертора струму: для фаз інвертора, в яких відкриті тиристори в анодній і катодній групах, - у вигляді відповідно додатного або від'ємного значень вхідного струму інвертора, а для фази інвертора, в якій всі тиристори закриті, - у вигляді нульового значення, для всіх можливих комбінацій відкритих тиристорів інвертора обчислюють значення проекцій прогнозованих узагальнених векторів вихідного струму інвертора на осі нерухомої ортогональної координатної системи: на вісь абсцис - у вигляді розрахованого для даної комбінації прогнозованого значення вихідного струму у фазі "а" інвертора, а на вісь ординат - у 3 вигляді поділеної на різниці значень розрахованих для даної комбінації вихідних струмів інвертора у фазах "b" і "с", через розраховані значення відхилень проекцій узагальненого вектора статорного струму на осі нерухомої ортогональної координатної системи і значення проекцій прогнозованих узагальнених векторів вихідного струму інвертора на осі вказаної координатної системи обчислюють аргументи узагальненого вектора відхилення струму і прогнозованих узагальнених векторів вихідного струму інвертора, для всіх комбінацій відкритих силових ключів інвертора обчислюють прогнозуючий функціонал у вигляді абсолютного значення різниці аргументів узагальненого вектора відхилення струму двигуна і прогнозованого узагальненого вектора вихідного струму інвертора, знаходять екстремальне (мінімальне) значення цього функціонала, при цьому поточну комбінацію відкритих тиристорів автономного інвертора струму, що характеризується одночасно відкритими станами двох тиристорів в різних фазах інвертора: одного - в анодній, іншого - в катодній групі інвертора, задають відповідною вказаному екстремальному значенню прогнозуючого функціонала, а вхідний струм інвертора регулюють прямо пропорційно корінню квадратному з суми квадратів необхідних значень намагнічувальної і активної проекцій узагальненого вектора статорного струму двигуна. 30471 6 Недоліком відомого способу є істотна технічна складність його практичної реалізації. Вона обумовлена, головним чином, складністю здійснення операцій обчислення аргументів узагальнених векторів (відхилення струму двигуна і вихідного струму інвертора) при розрахунку прогнозуючого функціонала, для виконання яких потрібно: по-перше, реалізація в обчислювачі складних нелінійних математичних операцій типу "arctg" або "arcsin" [3]; по-друге, знаходження аргументів вказаних узагальнених векторів у всіх чотирьох квадрантах на площині; і, по-третє, вживання спеціальних заходів по виключенню неоднозначності при визначенні цих аргументів (пов'язаної з періодичністю їх зміни, рівної 2p), а також при знаходженні різниці між аргументами згаданих векторів. В основі корисної моделі поставлена задача розробки більш простого в технічній реалізації способу векторного регулювання струму в асинхронному електроприводі з трифазним автономним інвертором струму на тиристорах, що замикаються, за допомогою якого забезпечується здешевлення вказаного частотно-регульованого асинхронного електропривода при збереженні високої якості (точності і швидкодії) регулювання статорного струму двигуна. Вирішення даної задачі досягається тим, що в способі векторного регулювання струму в асинхронному електроприводі з трифазним автономним інвертором струму на тиристорах, що замикаються, задають необхідні значення намагнічувальної і активної проекцій узагальненого вектора статорного струму двигуна відповідно на осі абсцис і ординат ортогональної координатної системи, що обертається, яка орієнтована віссю абсцис за узагальненим вектором потокозчеплення ротора асинхронного двигуна, контролюють поточні значення косинуса і синуса від аргументу узагальненого вектора потокозчеплення ротора асинхронного двигуна, за допомогою яких визначають із зворотних координатних перетворень за необхідними значеннями намагнічувальної і активної проекцій узагальненого вектора статорного струму задані значення проекцій цього вектора на осі абсцис і ординат нерухомої ортогональної координатної системи, яка орієнтована віссю абсцис за геометричною віссю обмотки статора фази "а" двигуна, від якої здійснюють відлік аргументів узагальнених векторів, контролюють поточні значення проекцій узагальненого вектора статорного струму двигуна на осі абсцис і ординат нерухомої ортогональної координатної системи, через які обчислюють відхилення проекцій узагальненого вектора статорного струму на осі абсцис і ординат нерухомої ортогональної координатної системи у вигляді різниці згаданих заданих і поточних значень проекцій узагальненого вектора статорного струму на відповідні осі вказаної нерухомої ортогональної координатної системи, контролюють вхідний струм автономного інвертора струму, через який для всіх можливих комбінацій відкритих тиристорів інвертора розраховують прогнозовані значення 7 вихідних фазних струмів автономного інвертора струму: для фаз інвертора, в яких відкриті тиристори в анодній і катодній групах, - у вигляді відповідно додатного або від'ємного значень вхідного струму інвертора, а для фази інвертора, в якій всі тиристори закриті, - у вигляді нульового значення, для всіх можливих комбінацій відкритих тиристорів інвертора обчислюють значення проекцій прогнозованих узагальнених векторів вихідного струму інвертора на осі нерухомої ортогональної координатної системи: на вісь абсцис - у вигляді розрахованого для даної комбінації прогнозованого значення вихідного струму у фазі "а" інвертора, а на вісь ординат - у 3 вигляді поділеної на різниці значень розрахованих для даної комбінації вихідних струмів інвертора у фазах "b" і "с", для всіх можливих комбінацій відкритих тиристорів інвертора обчислюють прогнозуючий функціонал і знаходять його екстремальне значення, при цьому поточну комбінацію відкритих тиристорів автономного інвертора струму, що характеризується одночасно відкритими станами двох тиристорів в різних фазах інвертора: одного в анодній, іншого - в катодній групі інвертора, задають відповідною вказаному екстремальному значенню прогнозуючого функціонала, а вхідний струм інвертора регулюють прямо пропорційно корінню квадратному з суми квадратів необхідних значень намагнічувальної і активної проекцій узагальненого вектора статорного струму двигуна, додатково розраховують модуль узагальненого вектора відхилення струму двигуна у вигляді коріння квадратного з суми квадратів обчислених відхилень проекцій статорного струму на осі абсцис і ординат нерухомої ортогональної координатної системи, обчислюють значення косинуса і синуса від аргументу узагальненого вектора відхилення струму двигуна у вигляді відповідно відношень проекцій цього вектора на осі абсцис і ординат нерухомої ортогональної координатної системи до модуля цього вектора, для всіх можливих комбінацій відкритих тиристорів інвертора розраховують значення косинуса і синуса від аргументів прогнозованих узагальнених векторів вихідного струму інвертора у вигляді 3 2 помножених на відношень прогнозованих значень проекцій цих векторів відповідно на осі абсцис і ординат нерухомої ортогональної координатної системи до вхідного струму інвертора, при цьому прогнозуючий функціонал обчислюють у вигляді двох доданків, перший з яких дорівнює добутку косинусів від аргументів узагальненого вектора відхилення струму і прогнозованого узагальненого вектора вихідного струму інвертора, а другий доданок - дорівнює добутку синусів від аргументів цих векторів. Для зменшення частоти перемикання тиристорів інвертора в способі за п.1 додатково порівнюють розраховане значення модуля узагальненого вектора відхилення струму з припустимою уставкою, при цьому, якщо значення модуля узагальненого вектора відхилення струму 30471 8 не перевищує вказаної уставки, то примусово зберігають незмінною і відповідною попередньому моменту часу комбінацію відкритих тиристорів автономного інвертора струму. Здійснення в запропонованому способі обчислення тригонометричних функцій синуса і косинуса від аргументу узагальненого вектора відхилення струму двигуна і від аргументів прогнозованих узагальнених векторів вихідного струму інвертора (замість обчислення безпосередньо аргументів цих векторів і різниці між вказаними аргументами у відомому способі) і розрахунок на основі цих тригонометричних функцій нового виду прогнозуючого функціонала (екстремальне значення якого задає поточну комбінацію відкритих тиристорів трифазного автономного інвертора струму) спрощує технічну реалізацію запропонованого способу і здешевлює створені з використанням запропонованого способу пристрої векторного регулювання статорного струму для частотно-регульованих асинхронних електроприводів з автономними інверторами струму на тиристорах, що замикаються. Таким чином, нові ознаки при взаємодії з відомими ознаками забезпечують появу нових технічних властивостей, зокрема, шляхом введення нових операцій розроблено спосіб векторного регулювання струму в асинхронному електроприводі з трифазним автономним інвертором струму на тиристорах, що замикаються. Це забезпечує всій заявленій сукупності ознак способу відповідність критерію "новизна". Аналоги, що містять ознаки, які відрізняються від прототипу, не знайдені; рішення явним чином не виходить з рівня техніки. Виходячи з вищевикладеного, можна зробити висновок, що запропоноване рішення задовольняє критерію "винахідницький рівень". Ідея корисної моделі пояснюється кресленнями: на Фіг.1 - функціональна схема варіанту пристрою, який реалізує запропонований спосіб; на Фіг.2 - функціональна схема варіанту пристрою, що реалізовує запропонований спосіб керування із зменшеною частотою перемикання тиристорів інвертора. Функціональна схема пристрою на Фіг.1 містить: асинхронний короткозамкнутий двигун 1, блок конденсаторів 2, регульоване джерело постійного струму 3, трифазний автономний інвертор струму 4, виконаний на тиристорах, що замикаються, 5-10, систему керування інвертором 11, блок керування 12, обчислювач відхилень проекцій струму 13, обчислювач завдання регульованому джерелу 14, датчик струму 15 і датчик проекцій статорного струму 16, задавачі намагнічувальної і активної проекцій статорного струму 17 і 18. При цьому автономний інвертор струму 4 підключений своїм входом до виходу регульованого джерела постійного струму 3, а виходом пов'язаний з паралельно між собою з'єднаними блоком конденсаторів 2 і статорними обмотками асинхронного двигуна 1. 9 Регульоване джерело постійного струму 3 виконане, наприклад, у вигляді трифазної мостової схеми нереверсивного тиристорного керованого випрямляча 19, підключеного входом до трифазної мережі змінного струму, з'єднаного виходом через згладжуючий реактор 20 з входом автономного інвертора струму 4 і зв'язаного керуючим входом через систему імпульснофазового керування 21 з виходом регулятора струму 22, перший з входів якого є задаючим входом і з'єднаний з виходом обчислювача завдання регульованому джерелу 14, а другий вхід регулятора струму 22 є входом від'ємного зворотного зв'язку і з'єднаний з виходом датчика струму 15, підключеного своїм входом до входу автономного інвертора струму 4. Блок керування 12 виконаний у вигляді обчислювача модуля 23 і перетворювача фаз 24, першого і другого обчислювачів гармонійних функцій 25 і 26, обчислювача фазних струмів інвертора 27, обчислювача прогнозуючого функціонала 28 і обчислювача екстремального значення 29. Причому, перші входи обчислювача модуля 23 і обчислювача гармонійних функцій 26 з'єднані разом і є першим входом блоку керування 12, а другі входи обчислювача модуля 23 і обчислювача гармонійних функцій 26 також з'єднані разом і є другим входом блоку керування 12. Вхід обчислювача фазних струмів інвертора 27 з'єднаний з одним з входів обчислювача гармонійних функцій 25 і виходом датчика струму 15 і є третім входом блоку керування 12, а вихід обчислювача фазних струмів інвертора 27 пов'язаний через перетворювач фаз 24 з іншим входом обчислювача гармонійних функцій 25. Обчислювач прогнозуючого функціонала 28 з'єднаний своїми першим і другим входами відповідно з виходами першого і другого обчислювачів гармонійних функцій 25 і 26, а виходом - з входом обчислювача екстремального значення 29, вихід якого є виходом блоку керування 12 і пов'язаний через систему керування інвертором 11 з керуючими входами інвертора 4. Обчислювач відхилень проекцій струму 13 виконаний у вигляді координатного перетворювача 30, датчика гармонійних функцій потокозчеплення 31 і блоку суматорів 32, причому, перший вхід координатного перетворювача 30 з'єднаний з першим входом обчислювача завдання регульованому джерелу 14 і виходом задавача намагнічувальної проекції струму 17 і є першим входом обчислювача відхилень проекцій струму 13, а другий вхід координатного перетворювача 30 підключений до другого входу обчислювача завдання регульованому джерелу 14 і до виходу задавача активної проекції струму 18 і є другим входом обчислювача відхилень проекцій струму 13. Третій і четвертий входи координатного перетворювача 30 сполучені з першим і другим входами датчика гармонійних функцій потокозчеплення 31, а перший і другий виходи координатного перетворювача 30 підключені до першого і другого входів блоку суматорів 32, третій і четвертий входи якого сполучені з першим і 30471 10 другим виходами датчика проекцій статорного струму 16 і є третім і четвертим входами обчислювача відхилень проекцій струму 13, а перший і другий виходи блоку суматорів 32 є першим і другим виходами обчислювача відхилень проекцій струму 13 і приєднані до першого і другого входів блоку керування 12. Датчик проекцій статорного струму 16 виконаний у вигляді блоку датчиків струму 33, підключеного своїми двома входами до двох фазних статорних обмоток двигуна 1, а двома виходами - до першого і другого входів обчислювача проекцій статорного струму 34, виходи якого є першим і другим виходами датчика проекцій статорного струму 16. Функціональна схема пристрою на Фіг.2, що реалізує запропонований спосіб керування із зменшеною частотою перемикання тиристорів інвертора, містить додатково (в порівнянні з пристроєм, представленому на Фіг.1) регістр 35 і компаратор 36, а блок керування 12 забезпечений другим виходом, яким є вихід обчислювача модуля 23, при цьому регістр 35 своїм першим (настановним) входом з'єднаний з виходом обчислювача екстремального значення 29, другим (блокуючим) входом пов'язаний через компаратор 36 із згаданим другим виходом блоку керування 12, а виходом регістр 35 з'єднаний з входом системи керування інвертором 11. Запропонований спосіб векторного регулювання струму в асинхронному електроприводі з трифазним автономним інвертором струму на тиристорах, що замикаються, функціонує (розглянемо на прикладі пристрою, показаного на Фіг.1) таким чином. За допомогою задавачів намагнічувальної і активної проекцій струму 17 і 18 (в якості яких можуть служити відповідно регулятори потокозчеплення і швидкості в частотно-регульованому асинхронному електроприводі) задають необхідні значення намагнічувальної I*sx і активної І*sу проекцій узагальненого вектора статорного струму двигуна 1 відповідно на осі абсцис "х" і ординат "у" ортогональної координатної системи "х-у", що обертається, яка орієнтована віссю абсцис "х" за узагальненим вектором потокозчеплення ротора Y асинхронного двигуна. За допомогою датчика гармонійних функцій потокозчеплення 31 [3] контролюють поточні значення косинуса (cosθψ) і синуса (sinθψ) від аргументу θψ узагальненого вектора Y потокозчеплення ротора асинхронного двигуна. Виходячи з вказаних значень, за допомогою координатного перетворювача 30 визначають з відомих зворотних координатних перетворень [3] за необхідними значеннями намагнічувальної I*sx і активної І*sу проекцій узагальненого вектора статорного струму задані значення проекцій I*sα, I*sβ цього вектора на осі абсцис "α" і ординат "β" нерухомої ортогональної координатної системи "α-β": 11 I* a = I* cos q Y - I* sin q Y ü s sx sy ï ý * * Isb = I sx sin sq Y + I * cos q Y ï sy þ 30471 (1) При цьому вказана нерухома ортогональна координатна система "α-β" орієнтована віссю абсцис "α" за геометричною віссю статорної обмотки фази "а" двигуна, від якої здійснюють відлік аргументів узагальнених векторів. За допомогою блоку датчиків струму 33 контролюють статорні струми Isα, Isβ, в двох фазах ("а" і "b") двигуна 1, через які за допомогою обчислювача проекцій статорного струму 34 визначають із співвідношень [3]: Ia = I a ü ï (2) ý Ib = (Ia + 2Ib ) 3 ï þ на виході датчика проекцій статорного струму 16 поточні значення проекцій Isα, Isβ узагальненого вектора статорного струму двигуна на осі абсцис "α" і ординат "β" нерухомої ортогональної координатної системи "α-β". Через дані значення проекцій в блоці суматорів 32 обчислюють відхилення ΔIα, ΔIβ проекцій узагальненого вектора статорного струму на осі абсцис "α" і ординат "β" нерухомої ортогональної координатної системи "αβ" у вигляді різниці згаданих заданих I*sα, I*sβ і поточних Isα, Isβ значень проекцій узагальненого вектора статорного струму на відповідні осі ("α" або "β") вказаної нерухомої ортогональної координатної системи: DI a = I * a - I s a ü s ï (3) ý * DIb = I sb - I sb ï þ За допомогою датчика струму 15 контролюють вхідний струм Іd, автономного інвертора струму 4, який задають від регульованого джерела постійного струму 3. Контролюючи на своїх входах задане І*d, і поточне Іd. значення струму на виході джерела 3, регулятор струму 22 впливає своїм вихідним сигналом через систему імпульснофазового керування 21 на кут керування тиристорів нереверсивного керованого випрямляча 19 таким чином, що забезпечує астатичне регулювання вказаного струму: I*d≈Іd. (4) При цьому задане значення струму І*d, джерела 3 визначається на виході обчислювача завдання регульованому джерелу 14 із співвідношень: ( ) + I( ) ü ï ý ( 3 / 2 - 1,1) ï þ * I= k I* d sx 2 * 2 sy (5) де = k Таким чином, з урахуванням (4) і (5) регулюють вхідний струм Іd інвертора прямо пропорційно корінню квадратному з суми квадратів необхідних значень намагнічувальної I*sx і активної I*sy проекцій узагальненого вектора статорного струму двигуна (що дозволяє при збереженні задовільних динамічних властивостей приводу знизити вхідний струм регульованого джерела струму 3 до мінімально можливого і за рахунок цього зменшити втрати електроенергії у вказаному 12 регульованому джерелі постійного струму 3 і автономному інверторі струму 4 при роботі даного електропривода). Для всіх можливих комбінацій m=1, 2,...6 відкритих тиристорів 5-10 інвертора 4 (які показані в табл.1) обчислювач фазних струмів інвертора 27 розраховує через значення вхідного струму інвертора І. прогнозовані значення вихідних фазних струмів Іa(m), Іb(m), Іc(m) автономного інвертора струму 4. При цьому для фаз інвертора 4, в яких відкриті тиристори в анодній і катодній групах, прогнозовані значення фазних струмів інвертора визначають у вигляді відповідно додатного (+Іd) або від'ємного (-Id) значень вхідного струму Id інвертора, а для фази інвертора 4, в якій всі тиристори закриті, - у вигляді нульового значення. Розраховані таким чином значення прогнозованих вихідних фазних струмів Іa, Іb, Іc інвертора 4 для всіх можливих комбінацій m його відкритих тиристорів приведені в табл.1. Комбінації відкритих (показані знаком "*") тирист інвертора струму 4 і відповідні їм значення вихідних фазн Номер комбінації m 1 2 3 4 5 6 Відкриті тиристори 5 6 7 8 * * * * * * * * Через прогнозовані значення вихідних фазних струмів інвертора Іa(m), Іb(m), Іc(m), що надходять на його вхід, на виході перетворювача фаз 24 обчислюють для всіх можливих комбінацій (m=1, 2,...6) відкритих тиристорів інвертора 4 значення проекцій Iα(m), Iβ(m) прогнозованих узагальнених векторів вихідного струму інвертора на осі нерухомої ортогональної координатної системи "αβ". Причому, вказані проекції Іα(m) на вісь абсцис "α" обчислюють у вигляді розрахованого для даної комбінації m відкритих тиристорів інвертора прогнозованого значення Іa(m) вихідного струму у фазі "а" інвертора, а на вісь ординат "β" - у вигляді поділеної на 3 різниці значень розрахованих для даної комбінації m вихідних струмів інвертора Ib(m) і Іс(m) у фазах "b" і "с": Ia (m) = Ia (m ), ü ï (6) ý Ib (m) = [Ib (m) - Ic (m )] 3 .ï þ Для всіх можливих комбінацій (m=1, 2,...6) відкритих тиристорів інвертора через обчислювач гармонійних функцій 25 розраховують значення косинуса і синуса від аргументів θI(m) прогнозованих узагальнених векторів вихідного 3 2 струму інвертора у вигляді помножених на відношень прогнозованих значень проекцій Iα(m), Iβ(m) цих векторів відповідно на осі абсцис "α" і 13 30471 ординат "β" нерухомої ортогональної координатної системи "α-β" до вхідного струму Іd інвертора: 3 é Ia (m) ù ü cos qI (m ) = ê ú,ï 2 ë Id û ï (7) ý 3 é Ib (m ) ù ï sin qI (m) = ê ú. ï 2 ê Id ú þ ë û Дані розрахункові співвідношення одержані з відомих залежностей [3]: cos qI (m) = Ia (m ) / I(m)ü ï (8) ý, sin qI (m ) = Ib (m) / I(m) ï þ з урахуванням співвідношення, що виконується, між модулем І(m) узагальненого вектора вихідного струму інвертора і вхідним струмом І, інвертора (для всіх можливих комбінацій відкритих тиристорів інвертора, наведених в табл.1): [ ] 12 2 ì2 2 (9) I(m) = í I2 (m ) + Ib m ) Ic m ý = ( +2 ( ü ) Id. a 3 3 î þ За вхідними сигналами відхилень ΔІα, ΔІβ проекцій узагальненого вектора статорного струму на осі абсцис "α" і ординат "β" нерухомої координатної системи на виході обчислювача модуля 23 розраховують у вигляді коріння квадратного з суми квадратів вказаних відхилень проекцій статорного струму модуль ΔІ узагальненого вектора відхилення струму двигуна: 2 DI = DI2 + DIb . a (10) За допомогою обчислювача гармонійних функцій 26 через згадані відхилення ΔІα, ΔІβ проекцій статорного струму обчислюють значення косинуса (соsθΔІ) і синуса (sinθΔІ) від аргументу θΔІ узагальненого вектора відхилення струму двигуна у вигляді відповідно відносин проекцій ΔІα, ΔІβ цього вектора на осі абсцис "α" і ординат "β" нерухомої ортогональної координатної системи до модуля ΔІ цього вектора: cos qDI = DIa / DI,ü ï (11) ý. sin qDI = DIb / D. ï þ За допомогою обчислювача прогнозуючого функціонала 28 через його вхідні сигнали тригонометричних функцій: соsθΔІ, sinθΔІ і cosθІ(m), sinθІ(m), - що надходять з виходів обчислювачів гармонійних функцій 25 і 26, обчислюють прогнозуючий функціонал F(m) у вигляді двох доданків, перший з яких дорівнює добутку косинусів від аргументів θΔІ, і θІ(m) узагальненого вектора відхилення струму і прогнозованого узагальненого вектора вхідного струму інвертора, а другий доданок - дорівнює добутку синусів від аргументів цих векторів: F(m) = (cos q DI )[cos qI (m)] + (sin qDI )[sin qI (m )]. (12) Через обчислювач екстремального значення 29 знаходять екстремальне (максимальне) значення F(m*) прогнозуючого функціонала F(m): F(m*)=max[F(m)], (13) і номер комбінації m* відкритих тиристорів інвертора (згідно умовно прийнятої нумерації в табл.1), при якій даний екстремум досягається. 14 При цьому з виходу обчислювача екстремального значення 29 задають через систему керування інвертором 11 таку комбінацію m* відкритих тиристорів автономного інвертора струму 4, яка характеризується одночасно відкритими станами двох тиристорів в різних фазах інвертора: одного - в анодній, іншого - в катодній групі інвертора (згідно з табл.1) і відповідає вказаному екстремальному значенню F(m*) прогнозуючого функціонала F(m). З урахуванням того, що співвідношення з (12) є косинусом різниці аргументів θΔІ і θІ(m): F(m)=cos[θΔІ-θІ(m)], (14) то знаходження екстремуму з (13) повністю тотожно визначенню екстремуму для наступного виразу з [2]: |θΔІ-θІ(m)|=min, (15) який, згідно відомому способу керування з [2], забезпечує ефективне векторне регулювання струму в асинхронному електроприводі з автономним інвертором струму на тиристорах, що замикаються. Тобто, в запропонованому способі векторного регулювання струму (аналогічно відомому способу [2]) поточна комбінація m* відкритих тиристорів інвертора 4, що задається, забезпечує швидкодійну підтримку близькими до нуля відхилень ΔІα, ΔІβ проекцій статорного струму двигуна (на осі нерухомої ортогональної координатної системи "α-β"): ΔIα≈0 і ΔIβ≈0, (16) що, як відомо, еквівалентно відпрацювання в електроприводі фактичними значеннями намагнічувальної Isx і активної Isy проекцій статорного струму двигуна 1 (на осі ортогональної координатної системи "х-у", що обертається, яка орієнтована віссю "х" за узагальненим вектором потокозчеплення ротора двигуна) для них заданих значень Isx, Isy: Isx≈I*sx і Isy≈I*sy. (17) При цьому запропонований спосіб векторного регулювання струму є істотно простішим в технічній реалізації, ніж відомий спосіб - прототип [2]. Це обумовлено, по-перше, використовуванням у відомому способі при знаходженні прогнозуючого функціонала більш простих обчислювальних операцій (а саме обчислень тригонометричних функцій косинуса і синуса, їх добутку і суми) замість істотно складніших (знаходження аргументів узагальнених векторів і їх різниці) у відомому способі. По-друге, інше спрощення запропонованого способу викликане виключенням необхідності обчислення в ньому (на відміну від прототипу) модуля прогнозованих узагальнених векторів вихідного струму інвертора (оскільки натомість в запропонованому способі при визначенні гармонійних функцій від аргументу прогнозованих узагальнених векторів струму інвертора застосовується сигнал вхідного струму інвертора, контрольований відповідним датчиком). У свою чергу, спрощення технічної реалізації пристроїв при застосуванні запропонованого способу векторного регулювання струму забезпечує їх здешевлення (за рахунок 15 використовування менш потужного обчислювача) при одночасному збереженні необхідної якості (швидкодії і точності) відпрацювання намагнічувальної і активної проекцій статорного струму двигуна в асинхронному електроприводі з автономним інвертором струму на тиристорах, що замикаються. Спосіб векторного регулювання струму в асинхронному електроприводі з трифазним автономним інвертором струму на тиристорах, що замикаються, який дозволяє зменшити частоту перемикання силових ключів інвертора і реалізований в пристрої на фіг. 2, функціонує аналогічно описаному раніше (на прикладі пристрою на Фіг.1) з наступними відмінностями. А саме, на вхід регістра (пристрою пам'яті) 35 з виходу обчислювача екстремального значення 29 надходить задане значення комбінації m* відкритих тиристорів інвертора. На вході компаратора 36 порівнюється сигнал модуля ΔІ узагальненого вектора відхилення струму, що розраховується з (10) на виході обчислювача модуля 23, з сигналом уставки дід (яка складає (35)% від амплітуди номінального статорного струму двигуна). Якщо значення модуля ΔІ узагальненого вектора відхилення струму не перевищує вказаної уставки ΔІП: ΔІ
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for vector regulation of current in asynchronous electric drive having three phase autonomous current inverters made of thyristors, which close
Автори англійськоюVolkov Oleksandr Vasyliovych, Kosenko Ihor Oleksandrovych
Назва патенту російськоюСпособ векторного регулирования тока в асинхронном электроприводе с трехфазным автономным инвертором тока на тиристорах , которые замыкаются
Автори російськоюВолков Александр Васильевич, Косенко Игорь Александрович
МПК / Мітки
МПК: H02P 21/00, H02P 7/00
Мітки: трифазним, тиристорах, спосіб, інвертором, регулювання, асинхронному, струму, автономним, векторного, замикаються, електроприводі
Код посилання
<a href="https://ua.patents.su/9-30471-sposib-vektornogo-regulyuvannya-strumu-v-asinkhronnomu-elektroprivodi-z-trifaznim-avtonomnim-invertorom-strumu-na-tiristorakh-shho-zamikayutsya.html" target="_blank" rel="follow" title="База патентів України">Спосіб векторного регулювання струму в асинхронному електроприводі з трифазним автономним інвертором струму на тиристорах, що замикаються</a>
Перетворювач з трифазним інвертором і напівпровідниковим вмикачем гальмових резисторів
Номер патенту: 24435
Опубліковано: 25.06.2007
Автор: Чернишев Аркадій Олексійович
МПК: G05D 13/00, H02M 7/66, H02P 5/74
Мітки: гальмових, перетворювач, інвертором, резисторів, напівпровідниковим, вмикачем, трифазним
Формула / Реферат:
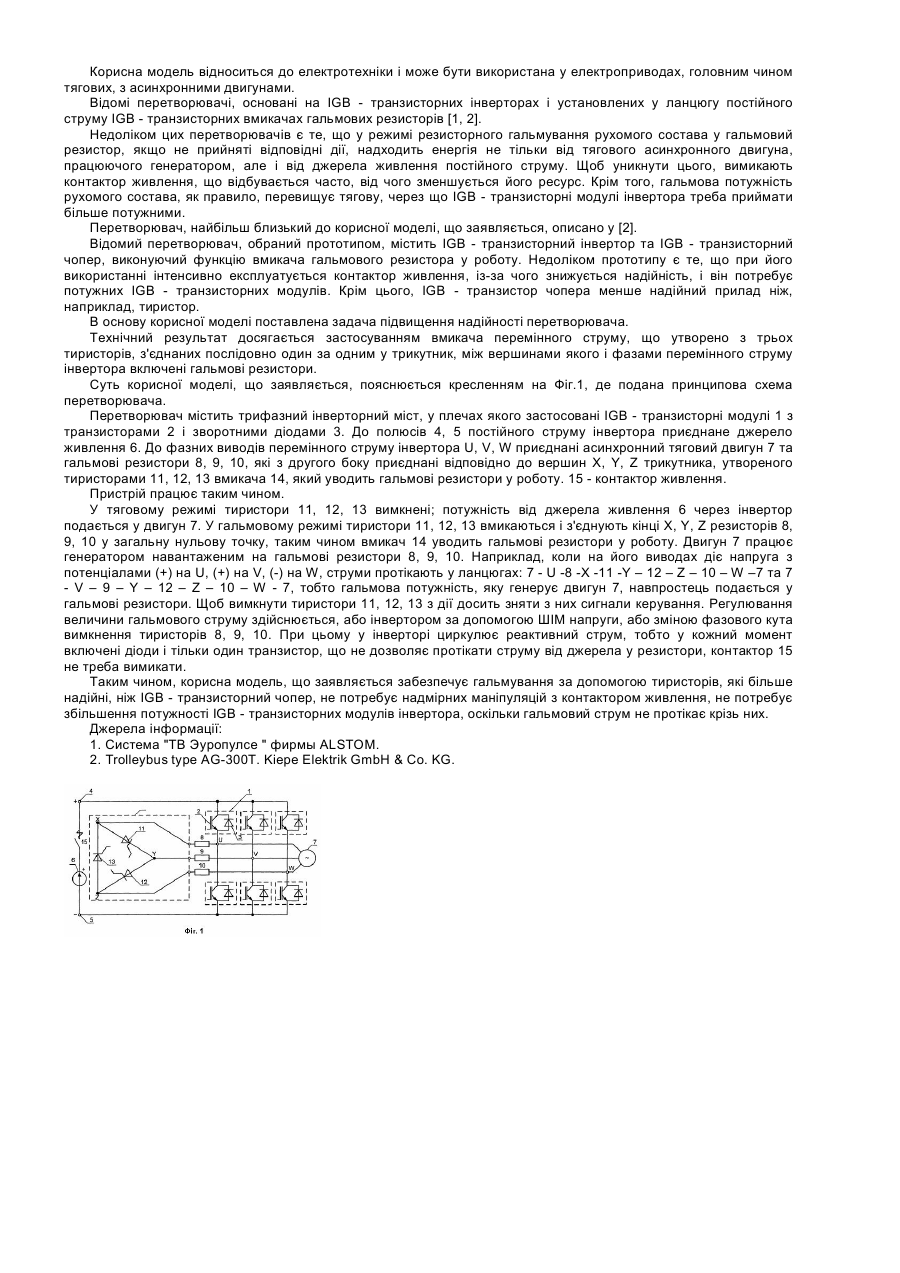
Перетворювач з трифазним інвертором і напівпровідниковим вмикачем гальмових резисторів, який відрізняється тим, що згаданий вмикач утворено з трьох тиристорів, з'єднаних послідовно один за одним у трикутник, між вершинами якого і фазами змінного струму інвертора включені гальмові резистори.
Перетворювач з інвертором і напівпровідниковим вмикачем гальмових резисторів
Номер патенту: 25450
Опубліковано: 10.08.2007
Автор: Чернишев Аркадій Олексійович
МПК: H02P 5/74, H02M 7/66, G05D 13/00
Мітки: перетворювач, напівпровідниковим, гальмових, резисторів, інвертором, вмикачем
Формула / Реферат:
Перетворювач з інвертором і напівпровідниковим вмикачем гальмових резисторів, який відрізняється тим, що згаданий вмикач утворений з тиристорів, з'єднаних попарно зустрічно-паралельно, які приєднують гальмові резистори до фаз змінного струму інвертора.
Пристрій для управління трифазним мостовим інвертором
Номер патенту: 35018
Опубліковано: 15.03.2001
Автори: Ренсевич Олександр Олександрович, Ренсевич Євген Олександрович
Мітки: трифазним, мостовим, управління, інвертором, пристрій
Формула / Реферат:
Пристрій для управління трифазним мостовим інвертором, який містить послідовно з'єднані зада-вальний генератор і лічильник ло модулю шість, який відрізняється тим. що лічильник виконано синхронним двоїчним, введені два шестйканальні демультиплексори на двонаправлених ключах, два обмежувальні резистори та два входи управління, причому відповідні адресні входи демультиплексорів підключені паралельно до виходів лічильника, інформаційні входи...
Пристрій для керування трифазним двигуном змінного струму
Номер патенту: 75708
Опубліковано: 15.05.2006
Автор: Сємідєл Сергій Павлович
МПК: H02P 27/02
Мітки: керування, струму, трифазним, змінного, двигуном, пристрій
Формула / Реферат:
1. Пристрій для керування трифазним двигуном змінного струму, що містить вхідний фільтр, під'єднаний до джерела живлення, випрямляч, побудований на некерованих напівпровідникових ключах з його фільтруючою ланкою, трифазний транзисторний інвертор з системою керування, виходи якого безпосередньо зв'язані з контактами для підключення трифазного двигуна змінного струму та датчик струму ланки постійного струму, вихідний сигнал якого надходить на...
Пристрій для управління трифазним мостовим інвертором
Номер патенту: 1602
Опубліковано: 25.10.1994
Автор: Ярославцев Михайло Іванович
Мітки: пристрій, трифазним, мостовим, інвертором, управління
Формула / Реферат:
Устройство для управлення трехфазным мостовым инвертором, содержащее задающий генератор с двумя выходами, соответственно коротких и длинных импульсов, счетчик по модулю шесть, подключенный входом к выходу коротких импульсов задающего генератора, преобразователь кодов с шестью выходами, запрограммированный в соответствии с табл. 1, подключенный входами к выходам счетчика по модулю шесть и к выходу длинных импульсов задающего генератора,...
Попередній патент: Пружна муфта
Наступний патент: Спосіб векторного регулювання струму на стороні змінного струму трифазного чотириквадрантного перетворювача
Випадковий патент: Пристрій для подовженої вакуумної терапії та ретроперитонеальної санації у хворих на некротичний панкреатит