Система для ремонту трубопроводів
Номер патенту: 49360
Опубліковано: 17.01.2005
Автори: Петровський Артур Адамович, Баранов Юрій Вячеславович, Маслак Віктор Миколайович, Бондар Анатолій Юрьйович
Формула / Реферат
Система для ремонту трубопроводів, що містить ремонтний модуль, складений з балона стисненого повітря, з'єднаного живильним гідрошлангом з першим електромагнітним клапаном, підключеним до надувного гідрошланга і до блока керування електромагнітними клапанами, приєднаного також до другого електромагнітного клапана, підключеного до робочого і випускного гідрошлангів, відеокамеру, розташовану на ньому і зв'язану з блоком керування, обладнаним персональним комп'ютером, телевізором і відеомагнітофоном, лебідку, складену з автоматичного кабелеукладача, електромеханічного підмотчика кабелю, колектора на валу барабана, причому нерухомі частини колектора підключені до вхідного розніму, а рухомі - до жил кабелю через графітні щітки, датчик шляху, яка відрізняється тим, що до системи введений самохідний діагностичний робот в герметичному корпусі, складений з відеокамери кольорового зображення, зв'язаної через відеопідсилювач з кабелем з металічним обплетенням, осьового двигуна відеокамери кольорового зображення, перший і другий, через резистор, виводи якого підключені до блока керування осьовим двигуном відеокамери кольорового зображення, з'єднаного з блоком живлення, азимутального двигуна відеокамери кольорового зображення, перший і другий, через резистор, виводи якого підключені до блока керування азимутальним двигуном відеокамери кольорового зображення, з'єднаного з блоком живлення, ходовий двигун, виводи якого підключені до його блока керування, складеного з блока запуску ходового двигуна, виходом підключеного до блока реверсування ходового двигуна і до першого виводу послідовно з'єднаних обмоток, другий вивід яких підключений до блока регулювання швидкості обертання вала двигуна, причому перший, другий, третій і четвертий входи блока запуску ходового двигуна, перший і другий входи блока регулювання швидкості обертання вала двигуна, перший і другий входи блока реверсування ходового двигуна є входами, а перший і другий виходи блока регулювання швидкості обертання вала двигуна - виходами блока керування ходовим двигуном, з'єднаного з блоком живлення, пристрій освітлення, складений з паралельно з'єднаних між собою двох послідовних сполучених ламп, перший і другий, через резистор, виводи яких підключені до блока керування пристроєм освітлення, а останній - до блока живлення, ультрафіолетова лампа, виводи якої приєднані до блока керування ультрафіолетовою лампою, підключеного до блока живлення, пристрій контролю, приєднаний до блока живлення, першим, через резистор, і другим, третім, через резистор, і четвертим, п'ятим і шостим, через резистор, сьомим і восьмим, через резистор, входами, відповідно, до другого виводу осьового двигуна, другого виводу азимутального двигуна, другого виводу паралельного з'єднання ламп пристрою освітлення і другого виводу ультрафіолетової лампи, дев'ятим, десятим і одинадцятим входами - до першого, другого і третього виходів блока керування, відповідно, першим виходом - до першого входу останнього, другий і третій, четвертий і п'ятий, шостий, сьомий і восьмий, дев'ятий і десятий, одинадцятий виходи блока керування з'єднані, відповідно, з першим і другим входами блока керування осьовим двигуном, першим і другим входами блока керування азимутальним двигуном, першим, другим і третім входами блока керування ходовим двигуном, першим і другим входами блока керування пристроєм освітлення, першим і другим входами блока керування ультрафіолетовою лампою, дванадцятим виходом - з датчиком шляху, розміщеним в діагностичному роботі в герметичному корпусі і оптомеханічно зв'язаним з ведучим його колесом, тринадцятим і чотирнадцятим виходами - з входами блоків керування ходовими муфтами, підключеними до блока живлення і складеними з схеми керування, вихід якої підключений до першого виводу обмотки, причому перший, другий, третій і четвертий входи схеми керування є входами, а другий вихід обмотки - виходом блоків керування муфтами, п'ятнадцятим і шістнадцятим виходами - з кабелем з металічним обплетенням, що, в свою чергу, з'єднаний з третім входом блока керування, в ремонтний модуль введені датчик тиску і вторинний перетворювач тиску, з'єднані між собою і підключені до блока керування електромагнітними клапанами і з'єднувального кабелю, в бортову частину - пристрій керування, живлення і візуалізації отриманої інформації, введені бензогенератор, знакогенератор, причому перший вихід бензогенератора підключений до персонального комп'ютера, другий і третій виходи, відповідно, до першого входу знакогенератора і до першого входу відеомагнітофона, четвертий вихід - до першого входу телевізора кольорового зображення, другий вхід якого з'єднаний з першим виходом знакогенератора, другий вихід останнього підключений до другого входу відеомагнітофона, вихід телевізора кольорового зображення - до другого входу знакогенератора, третій вхід якого з'єднаний з кабелем з металічним обплетенням.
Текст
Система для ремонту трубопроводів, що містить ремонтний модуль, складений з балона стисненого повітря, з'єднаного живильним пдрошлангом з першим електромагнітним клапаном, підключеним до надувного пдрошланга і до блока керування електромагнітними клапанами, приєднаному також до другого електромагнітного клапана, підключеного до робочого і випускного пдрошланпв, відеокамеру, розташовану на ньому і зв'язану з блоком керування, обладнаним персональним комп'ютером, телевізором і відеомагнітофоном, лебідку, складену з автоматичного кабелеукладача, електромеханічного підмотчика кабелю, колектора на валу барабана, причому нерухомі частини колектора підключені до вхідного розніму, а рухомі - до жил кабелю через графітні щітки, датчик шляху, що відрізняється тим, що до системи введений самохідний діагностичний робот в герметичному корпусі, складений з відеокамери кольорового зображення, зв'язаної через відеопідсилювач з кабелем з металічним обплетенням, осьового двигуна відеокамери кольорового зображення, перший і другий, через резистор, виводи якого підключені до блока керування осьовим двигуном відеокамери кольорового зображення, з'єднаного з блоком живлення, азимутального двигуна відеокамери кольорового зображення, перший і другий, через резистор, виводи якого підключені до блока керування азимутальним двигуном відеокамери кольорового зображення, з'єднаного з блоком живлення, ходовий двигун, виводи якого підключені до його блока керування, складеного з блока запуску ходового двигуна, виходом підключеним до блока реверсування ходового двигуна і до першого виводу послідовно з'єднаних обмоток, другий вивід яких підключений до блока регулювання швидкості обертання вала двигуна, причому перший, другий, третій і четвертий входи блока запуску ходового двигуна, перший і другий входи блока регулювання швидкості обертання вала двигуна, перший і другий входи блока реверсування ходового двигуна є входами, а перший і другий виходи блока регулювання швидкості обертання вала двигуна - виходами блока керування ходовим двигуном, з'єднаному з блоком живлення, пристрій освітлення, складений з паралельно з'єднаних між собою двох послідовних сполучених ламп, перший і другий, через резистор, виводи яких підключені до блока керування пристроєм освітлення, а останній - до блока живлення, ультрафіолетова лампа, виводи якої приєднані до блока керування ультрафіолетовою лампою, підключеному до блока живлення, пристрій контролю, приєднаний до блока живлення, першим, через резистор, і другим, третім, через резистор, і четвертим, п'ятим і шостим, через резистор, сьомим і восьмим, через резистор, входами ВІДПОВІДНО - до другого виводу осьового двигуна, другого виводу азимутального двигуна, другого виводу паралельного з'єднання ламп пристрою освітлення і другого виводу ультрафіолетової лампи, дев'ятим, десятим і одинадцятим входами - до першого, другого і третього виходів блока керування ВІДПОВІДНО, першим виходом - до першого входу останнього, другий і третій, четвертий і п'ятий, шостий, сьомий і восьмий, дев'ятий і десятий, одинадцятий виходи блока керування з'єднані ВІДПОВІДНО З першим і другим входами блока керування осьовим двигуном, першим і другим входами блока керування азимутальним двигуном, першим, другим і третім входами блока керування ходовим двигуном, першим і другим входами блока керування пристроєм освітлення, першим і другим входами блока керування ультрафіолетовою лампою, дванадцятим вихідом - з датчиком шляху, розміщеним в діагностичному роботі в герметичному корпусі і оптомеханічно зв'язаним з ведучим його колесом, тринадцятим і чотирнадцятим виходами - з входами блоків керування ходовими муфтами, підключеними до блока живлення і складеними з схеми керування, вихід якої підключений до першого виводу обмотки, причому перший, другий, третій і четвертий входи схеми керування є входами, а О (О со 49360 другий вихід обмотки - виходом блоків і керування муфтами, п'ятнадцятим і шістнадцятим виходами з кабелем з металічним обплетенням, що, в свою чергу, з'єднаний з третім входом блока керування , в ремонтний модуль введені датчик тиску і вторинний перетворювач тиску, з'єднані між собою і підключені до блока керування електромагнітними клапанами і з'єднувального кабелю, в бортову частину - пристрій керування , живлення і візуалізацм отриманої інформації введені бензогенератор, знакогенератор, причому перший вихід бензогенератора підключений до персонального комп'ютера, другий і третій виходи - ВІДПОВІДНО до першого входу знакогенератора і до першого входу відеомагнітофона, четвертий вихід - до першого входу телевізора кольорового зображення, другий вхід якого з'єднаний з першим виходом знакогенератора, другий вихід останнього підключений до другого входу відеомагнітофона, вихід телевізора кольорового зображення - до другого входу знакогенератора, третій вхід якого з'єднаний з кабелем з металічним обплетенням Винахід відноситься до каналізації і водопостачання, а саме, до експлуатації трубопроводів, і може бути використаний для ремонту внутрішньої поверхні останніх Відомий пристрій для ремонту прокладених під землею трубопроводів [1], якій включає в себе надувне циліндричне тіло із збираємого у складки гнучкого матеріалу з передбаченими на його торцях запірними шайбообразними пластинами 1 циліндричний виступ, який вводиться у відгалуження і витягається назад з нього і має на ЗОВНІШНІМ торці телекамеру Недоліки останнього наступні вузька область застосування, бо забезпечується тільки ремонт місць підключення ВІДВОДІВ, застосування однотипних ремонтних клеїв Відомий пристрій для ремонту труб шляхом введення дистанційно керованого вкладиша [2], який із благородного металу з простим фіксуючим механізмом, містить свердло для зачищення пошкоджених поверхонь, отвір, через який подається ремонтний розчин, робот або каретка, на які встановлюється пристрій і якими управляють дистанційно з допомогою телевізійної камери До недоліків пристрою слід віднести збільшення часу ремонту із-за локального закладення одного пошкодження, складність проведення ремонту при закладанні радіальних пошкоджень Найбільш близьким до винаходу є пристрій для ремонту трубопроводу [3], що складається з розміщеного в трубопроводі, у якому є тріщини, каверни, вимиті затрубні пустоти, засобу нанесення на внутрішню стінку трубопроводу ремонтного розчину і прискорювач ствердіння ремонтного розчину, виконаний в вигляді розташованих на еластичному порожнистому корпусі трьох зондів з п'ятьома надувними камерами і встановлених між ними чотирьох гофрованих еластичних контейнерів, що мають внутрішню оболонку, і манжетного ущільнення, закріпленого на кінцевому контейнері, парні контейнери заповнені ремонтним розчином, непарні контейнери - рідким прискорювачем ствердіння ремонтного розчину Порожнина внутрішніх оболонок контейнерів сполучена з трубопроводом, який розміщений всередині пристрою по всій його довжині і з'єднаний з джерелом стиснутого повітря У порожнині контейнерів розміщений гнучкий трубопровід, який сполученій шляхом отводів з надувними камерами і з джерелом стислого повітря У порожнині першого зонда змонтований другий трубопровід, сполучений з порожниною еластичного дроселя, закріпленого на еластичному порожнистому корпусі Зонди з'єднані між собою шляхом кільцевих діафрагм, до останніх прикріплений другий гнучкий трубопровід На третій надувній камері останнього зонда закріплені профільні Побразні пластини, що мають канали, порожнини другий, четвертої і п'ятої надувних камер сполучені з першим гнучким трубопроводом, порожнина третьої камери сполучена з третім трубопроводом, діафрагми сполучені з третім гнучким трубопроводом У порожнині між останнім зондом і першим контейнером введен ВІДВІД від другого гнучкого трубопроводу Порожнини першого і третього контейнерів сполучені з третіми гнучкими трубопроводами, порожнини другого і четвертого контейнерів сполучені з другими гнучкими трубопроводами У порожнині контейнерів розміщений перший трубопровід для подачі ремонтного розчину і рідкого прискорювача ствердіння ремонтного розчину і перший токопровід У корпусі контейнерів є монтажні вікна Манжетне ущільнення, яке закріплене на останньому контейнері, з'єднане з першим гнучким трубопроводом, а в його юбочній порожнині змонтований електромагнітний кран, з'єднаний з першим токопроводом і з першим трубопроводом Перший гнучкий трубопровід, другий і третій трубопроводи і перший токопровід введені у корпус блока системи керування пристроєм На корпусі закріплені еластичні пелюстки з датчиками радіального переміщення, з'єднані другим токопроводом з блоком керування, розміщеним у корпусі блоку системи керування пристроєм На корпусі блоку системи керування пристроєм на підпружинених важелях закріплені колеса з датчиком поздовжнього переміщення, з'єднаним третім токопроводом з блоком керування, що з'єднаний з блоком живлення До блоку керування приєднані перший, другий, третій і четвертий токопроводи В корпусі блоку керування змонтований ресивер, що з'єднаний з трубопроводами через електромагнітні клапани, а вони з'єднані з токопроводами Трубопровід, що підлягає ремонту, постачений двома шляховими 49360 засувками, відводами і засувками За першою шляховою засувкою в трубопровід врізане технологічне відведення з засувкою, а за ній змонтоване відведення, з'єднане з стартовою трубою В останній , змонтовані два введення з запірной арматурою До стартової труби приєднаний четвертий трубопровід з засувкою від відводу трубопровода, який ремонтується, що з'єднаний з одним із вводів шляхом засувки трубопровода, який ремонтується 3 протилежної сторони в стартову трубу врізане відведення з засувкою Перед другою шляховою засувкою в трубопровод, який ремонтується, врізане технологічне відведення з засувкою і пасткою До недоліків даного пристою слід віднести складність його конструкції (див фіг), що значно знижує надійність, заважність введення виведення пристою в-з трубопроводу, переміщення ремонтного пристрою по трубопроводу з певною постійною швидкістю, наявність спеціальних приладів пуску і випуску, відсутність контролю якості виконаних робіт Поставлена задача вирішується тим, що в систему для ремонту трубопроводів, що містить ремонтний модуль, складений з балона стислого повітря, з'єднаного живильним пдрошлангом з першим електромагнітним клапаном, підключеним до надувного пдрошланга і до блока керування електромагнітними клапанами, приєднаного також до другого електромагнітного клапана, підключеного до робочого і випускного пдрошланпв, відеокамеру, розташовану на ньому і зв'язану з блоком керування, обладнаним персональним комп'ютером, телевізором і відеомагнітофоном, лебідку, складену з автоматичного кабелеукладача, електромеханічного підмотчика кабелю, колектора на валу барабана, причому нерухомі частини колектора підключені до вхідного розніму, а рухомі - до жил кабелю через графітні щітки, датчик шляху, введений самохідний діагностичний робот в герметичному корпусі, складений з відеокамери кольорового зображення, зв'язаної через відеопідсилювач з кабелем з металічним обплетенням, осьового двигуна відеокамери кольорового зображення, перший і другий, через резистор, виводи якого підключені до блока керування осьовим двигуном відеокамери кольорового зображення, з'єднаного з блоком живлення, азимутального двигуна відеокамери кольорового зображення, перший і другий, через резистор, виводи якого підключені до блока керування азимутальним двигуном відеокамери кольорового зображення, з'єднаного з блоком живлення, ходовий двигун, виводи якого підключені до його блоку керування, складеного з блока запуску ходового двигуна, виходом підключеним до блока реверсування ходового двигуна і до першого виводу послідовно з'єднаних обмоток, другий вивід яких підключений до блока регулювання швидкості обертання вала двигуна, причому перший, другий, третій і четвертий входи блока запуску ходового двигуна, перший і другий входи блока регулювання швидкості обертання вала двигуна, перший і другий входи блока реверсування ходового двигуна є входами, а перший і другий виходи блоку регулювання швидкості обертання вала двигуна - виходами блока керування ходовим двигуном, з'єднаному з блоком живлення, пристрій освітлення, складений з паралельно з'єднаних між собою двох послідовно сполучених ламп, перший і другий виводи яких підключені до блока керування пристроєм освітлення, а останній - до блока живлення, ультрафіолетова лампа, виводи якої приєднані до блока керування ультрафіолетовою лампою, підключеному до блока живлення, пристрій контролю, приєднаний до блока живлення, першим, через резистор, і другим, третім, через резистор, і четвертим, п'ятим і шостим, через резистор, сьомим і восьмим, через резистор, входами ВІДПОВІДНО-ДО другого виводу восьмого двигуна, другого виводу азимутального двигуна, другому виводу паралельного з'єднання ламп пристрою освітлення і другому виводу ультрафіолетової лампи, дев'ятим, десятим і одинадцятим входами - до першого, другого і третього виходів блока керування ВІДПОВІДНО, першим виходом - до першого входу останнього, другий і третій, четвертий і п'ятий, шостий, сьомий і восьмий, дев'ятий і десятий, одинадцятий виходи блока керування з'єднані ВІДПОВІДНО З першим і другим входами блока керування осьовим двигуном, першим і другим входами блока керування азимутальним двигуном, першим, другим і третім входами блока керування ходовим двигуном, першим і другим входами блока керування пристроєм освітлення, першим і другим входами блока керування ультрафіолетовою лампою, дванадцятим виходом - з датчиком шляху, розміщеним в діагностичному роботі в герметичному корпусі і оптомеханічно зв'язаним з ведучим колесом, тринадцятим і чотирнадцятим виходами - з входами блоків керування ходовими муфтами, підключеними до блока живлення і складеними з схеми керування, вихід якої підключений до першого виводу обмотки, причому перший, другий, третій і четвертий входи схеми керування є входами, а другий вихід обмотки виходом блоків керування муфтами, п'ятнадцятим і шістнадцятим виходами - з кабелем з металічним обплетенням, що в свою чергу з'єднаний з третім входом блока керування, в ремонтний модуль введені датчик тиску і вторинний перетворювач тиску, з'єднані між собою і підключені до блока керування електромагнітними клапанами і з'єднувального кабелю, в бортову частину, пристрій керування, живлення і візуалізацм отриманої інформації, введені бензогенератор, знакогенератор, причому перший вихід бензогенератора підключений до персонального комп'ютера, другий і третій виходи - ВІДПОВІДНО ДО першого входу знакогенератора і до першого входу відеомагнітофона, четвертий вихід - до першого входу телевізора кольорового зображення, другий вхід якого з'єднаний з першим виходом знакогенератора, другий вихід останнього підключений до другого входу відеомагнітофона, вихід телевізора кольорового зображення - до другого входу знакогенератора, третій вхід якого 49360 з'єднаний з кабелем з металічним обплетенням Введення в ремонтний модуль датчика тиску і вторинного перетворювача тиску дозволило регулювати тиск в роздувному гумовому рукаві з затиснутими торцями в процесі ремонту Введення діагностичного робота в герметичному корпусі в систему, який складається з відеокамери кольорового зображення, відеопідсилювача, осьового і азимутального двигунів відеокамери кольорового зображення з їх блоками керування, ходового двигуна з його блоком керування, блоків керування ходовими муфтами, пристрою освітлення з блоком керування, ультрафіолетової лампи з блоком керування, датчика шляху, пристрою контролю, блока керування, блока живлення, дозволило доставляти ремонтний модуль до місця пошкодження, проводити його візуалізацію і контроль оператором за ходом виконання і якістю здійснюючих робіт Введення в бортову частину, пристрій керування, живлення і візуалізацм отриманої інформації, бензогенератора дозволило забезпечити живленням всю систему, а знакогенератора - візуалізіровати інформацію одержану від датчика шляху Введення в систему для ремонту трубопроводів перерахованих блоків і зв'язків між ними і системою у цілому дозволило вирішити поставлену задачу - підвищити надійність ремонту, знизити витрати і час проведення його На фіг 1-3 - наведена блок-схема системи для ремонту трубопроводів, На фіг 4 - електрична схема блоку керування осьовим двигуном відеокамери кольорового зображення і блоку керування азимутальним двигуном відеокамери кольорового зображення, На фіг 5 - електрична схема блоку керування ходовим двигуном, На фіг 6 - електрична схема пристрою контролю, На фіг 7 - електрична схема блока керування ходовими муфтами, електромагнітними клапанами та ультрафіолетової лампою На фіг 8 - електрична схема блоку керування пристроєм освітлення Система для ремонту трубопроводів складається з ремонтного модуля 1, поміщеного в корпус в вигляді циліндра на ходу, на якому розміщений надувний гумовий рукав з затиснутими торцями, з'єднувальний механічний пристрій, кабельне рознімання, (на фіг не показані), самохідного діагностичного робота в герметичному корпусі 2, розміщених в пошкодженому трубопроводі, а також бортової частини - приладу керування , живлення і візуалізацм отриманої інформації 3 Ремонтний модуль 1 містить датчик тиску 4, балон стислого повітря 5, два електромагнітних клапана 6 і 7, блок керування електромагнітними клапанами 8, вторинний перетворювач тиску 9, пдрошланги живильний 10, надувний 11, робочий 12, випускний 13 і підключен з'єднувальним кабелем 14 до самохідного діагностичного роботу в герметичному корпусі 2, складений з відеокамери кольорового зображення 15, відеопідсилювача 16, осьового двигуна відеокамери кольорового зображення 17, блока керування осьовим двигуном відеокамери кольорового зображення 18, азимутального двигуна відеокамери кольорового зображення 19, блока керування азимутальним двигуном відеокамери кольорового зображення 20, ходового двигуна 21, блока керування ходовим двигуном 22, пристрою освітлення (ламп розжарювання) 23, блока керування пристроєм освітлення 24, блока керування ультрафіолетовою лампою 25, струмових резисторів R1 - R4, пристрою контролю 26, блока керування 27, блока живлення 28, блоків керування ходовими муфтами 29, ЗО, датчика шляху 31, кабелю з металічним обплетенням 32 Бортова частина - пристрій керування , живлення і візуалізацм отриманої інформації 3 складається з знакогенератора 33, телевізору кольорового зображення 34, відеомагнітофону 35, персонального комп'ютера 36, бензогенератора 37, лебідки 38 з колектором на валу барабана, складеній з автоматичного укладчика кабелю 39 і електромеханічного підмотчика кабелю 40 Блок керування осьовим двигуном відеокамери кольорового зображення 18 ідентичен блоку керування азимутальним двигуном 20 і складається з мостової схеми 41, транзисторного перемикача 42, резистора R5, оптроних розв'язок VI - R6, V2 - R7 Блок керування ходовим двигуном 22 складається з блоку запуску ходового двигуна 43, блоку реверсування ходового двигуна 44, блоку реверсування швидкості обертання валу останнього 45 Пристрій контролю містить стабілізатор напруги+15 В 46, перший фільтр низьких частот 47, мультивібратор з перебудованою ЩІЛИННІСТЮ імпульсів 48, другий фільтр низьких частот 49, многовхідний мультиплексор 50, п'ять оптроних розв'язок V3 R7, V4 - R8, V5 -R9, V6 - R10, V7 - R11 і резистори R R12 - R Блок керування пристроєм освітлення 24 містить мультивібратор з перебудованою ЩІЛИННІСТЮ імпульсів 51, оптрону розв'язку V9 R17, транзистор V8, резистори R16, R18 Блок керування ходовими муфтами, блок керування клапанами і блок керування ультрафіолетовою лампою аналогічні і складаються з схеми керування 52 і обмоток С1 - С2, причому балон стислого повітря 5 з'єднаний живильним пдрошлангом 10 з першим електромагнітним клапаном 6, підключеним до надувного пдрошлангу 11 і до блоку керування електромагнітними клапанами 8 приєднаному також до другого електромагнітного клапана 7, підключеного до робочого 12 і випускного 13 пдрошлангам, відеокамера 15 зв'язана через відеопідсилювач 16 з кабелем з металічним обплетенням 32, в осьовому двигуні відеокамери кольорового зображення 17 перший і другий, через резистор, висновки підключені до блоку керування осьовим двигуном відеокамери кольорового зображення 18, з'єднаному з блоком живлення 28, в азимутальном двигуні відеокамери кольорового зображення 19 перший і другий, через резистор, висновки підключені до блоку керування азимутальним двигуном відеокамери 49360 кольорового зображення 20, з'єднаним з блоком живлення 28, висновки ходового двигуна 21 підключені до його блоку керування 22, в якому блок запуску ходового двигуна 43 виходом під ключей до блоку реверсування ходового двигуна 44 і до першого висновку послідовно з'єднаних обмоток С1 - С2, СЗ - С4, другий висновок яких підключен до блоку регулювання швидкості обертання валу двигуна 45, причому перший, другий, третій і четвертий входи блоку запуску ходового двигуна 43, перший і другий входи блоку регулювання швидкості обертання валу двигуна 45, перший і другий входи блоку реверсування ходового двигуна 44 є входами, а перший і другий виходи блоку регулювання швидкості обертання валу двигуна 45 - виходами блоку керування ходовим двигуном 22, з'єднаний з блоком живлення 28, пристрій освітлення 23, в якому перший і другий, через резистор, висновки послідовних сполучень ламп підключені до блоку керування пристроєм освітлення 24, а останній до блоку живлення 28, ультрафіолетова лампа, першим і другим, через резистор, висновками приєднана до блоку керування ультрафіолетовою лампою 25, підключеному до блоку живлення 28, пристрій контролю 26, приєднай до блоку живлення 28, першим, через резистор, і другим, третім, через резистор, і четвертим, п'ятим і шостим, через резистор, сьомим і восьмим, через резистор, входами ВІДПОВІДНО - до другого висновку осьового двигуна 17, другого висновку азимутального двигуна 19, другого висновку паралельного сполучення ламп пристрою освітлення 23 і другого висновку ультрафіолетової лампи 25, дев'ятим, десятим і одинадцятим входами - до першого, другого і третього виходів блоку керування 27 ВІДПОВІДНО, першим виходом до першого входу останнього, другий і третій, четвертий і п'ятий, шостий, сьомий і восьмий, дев'ятий і десятий, одинадцятий виходи блоку керування 27 з'єднані ВІДПОВІДНО З першим і другим входами блоку керування осьовим двигуном 18, першим і другим входами блоку керування азимутальним двигуном 20, першим, другим і третім входами блоку керування ходовим двигуном 22, першим і другим входами блоку керування пристроєм освітлення 24, першим І другим входами блоку керування ультрафіолетовою лампою 25, дванадцятий вихід з датчиком шляху 3 1 , тринадцятий і чотирнадцятий виходи - із входами блоків керування муфтами 29, ЗО, підключеними до блоку живлення 28, причому вихід схеми керування 52 підключен до першого висновку обмотки С1 - С2, перший, другий, третій і четвертий входи схеми керування 52 є входами, а другий вихід обмотки С1 - С2 - виходом блоків управління муфтами 29 ЗО, п'ятнадцятий і шістнадцятий виходи - з кабелем з металічним обплетенням 32, який з'єднаний з третім входом блоку керування 27, датчик тиску 4 і вторинний перетворювач тиску 5 з'єднані між собою і підключені до блоків керування електромагнітними клапанами 29, ЗО і єднального кабелю 14, перший вихід бензогенератора 37 підключен до персонального 10 комп'ютера 36, другий і третій виходи - ВІДПОВІДНО до першого входу знакогенератора 33 і до першого входу відеомагнітофону 35, четвертий вихід - до першого входу телевізору кольорового зображення 34, другий вхід якого з'єднаний з першим виходом знакогенератора 33, другий вихід останнього підключен до другого входу відеомагнітофону 35, вихід телевізору кольорового зображення 34 підключен до другого входу знакогенератора 33, третій вхід якого з'єднаний з кабелем з металічним обплетенням 32 В систему для ремонту трубопроводів входять покупні вироби такі як відеомагнітофон 35, кольоровий телевізор 34, переносний комп'ютер 36, бензогенератор 37, блок реверсування ходового двигуна 44 (взятий з дрилі побутової електричної з можливістю реверсування типу МЗС-3003), двигуни типу ДПМ 30-Н1-04, МН-145, ДР-1 5 РВ, електромагнітні клапани типу М220, балон стислого повітря 5, відеокамера 15, шланги стислого повітря і кабелі єднальний і з металічним обплетенням , узяті з науково-технічної або патентної документації - це відеопідсилювач 16 - Аналогові і цифрові інтегральні мікросхеми Під редакцією С В Якубовського М Радіозв'язок, 1985р, с 336, малюнок 6 6 1 , блок живлення діагностичного робота в герметичному корпусі 28 Джерела електроживлення радіоелектронної апаратури, Довідник, Г С Найвельт, К Б Мазель і ш , під редакцією Г С Найвельта, М Радіо і зв'язок, 1986р , с 323, малюнок 8 16, блок керування 26- Довідник Вироби і компоненти що пропонуються фірмою «КТЦ - МК» Мікроконтролери фірми АТМЕІ- родини АУК, знакогенератор 33 - Аматорські телевізійні ігри Овечкін М А , М Радіозв'язок, 1 9 8 5 р , с 19, малюнок 3 1 , мостова схема переключення 41 - Джерела електроживлення радіоелектронної апаратури Довідник, Г С Нейвельт, К Б Мазель і ш , під редакцією Г С Нейвельта М Радіо і зв'язок, 1986р , с 407, малюнок 10 4, транзисторний перемикач 42 - Мистецтво схемотехніки, в двох томах, т 1, переклад з англійського, -вид 3-є, стереотип, М Мир, 1986р , с 9 1 , малюнки 2 З, мультивібратор з перебудованою ЩІЛИННІСТЮ імпульсів 48, 51 - Мікроелектронні засоби обробки аналогових сигналів, Коломбет Є А , М Радіо і зв'язок, 1991 р с 206, малюнки 7 19, напівпровідникове реле V3 - R7 - R12 V6 R10 - R15 - Напівпровідникові електронні пристрою Довідник, В І Іванов, А І Аксьонов, А М Юшин, 2-е видання, перероблене і доповнене, М Енергоатомвид , 1989р , с 365, малюнки 10 8, многовхідний мультиплексор 50 - Популярні цифрові мікросхеми Довідник, 2-е видання, виправлене, М Радіо і зв'язок, с 230, малюнок 2 28 (Масова радюбіблютека, вип 1145), фільтр низьких частот 46, 48 - Мистецтво схемотехніки, в 2-х томах, т 1, переклад з англійського, видання 3-є, стереотип, М Мир, 1986р , с 58, малюнок 1 54, 11 49360 стабілізатор напруги+15 В 51 - Практичне керівництво по розрахункам схем в електроніці Довідник, В 2-Х томах, т 1, переклад з англійського, під редакцією Ф Н Покровського, М Енергоатомвид , 1991 р , с 218, малюнок 10 10, блок запуску ходового двигуна 43 - Сіністори і їх застосування в побутовій електроапаратурі М Енергоатомиздат, 1990р , з 47, малюнок 4 1, блок регулювання швидкості обертання валу двигуна 45 - Інтегральні мікросхеми (перспективні видання), видавництво ДОДЕКА, 1996р Працює система для ремонту трубопроводів наступним чином При включенні живлення самохідного діагностичного робота в герметичному корпусі 2 блок керування 27 автоматично скидається і починає виконуватися підпрограма ініціалізації Відбувається установлення в початковий стан внутрішніх регістрів і чарунок оперативнозапам'ятовуючого пристрою (ОЗП) блоку керування 27, а також установлення параметрів зв'язку по послідовному каналу протоколу R3-232C с персональним комп'ютером Після повернення з под програми ініціалізації починається виконання підпрограми діагностики Блоком керування 27, визначаються значення живлюючих напруг +5В,+27В,+12В,+15В, - 15В, що подаються через дільники напруг на входи багатоканального вбудованого в ЦПК аналого-ціфрового перетворювача (АЦП) Якщо живлюючі напруги будуть відсутні або відхилені від заданих границь, блок керування 27 передає їх величини по послідовному канапу в персональний комп'ютер 36 і описана ПОСЛІДОВНІСТЬ ДІЙ повторюється до прийняття рішення оператором про виключеня самохідного діагностичного робота в герметичному корпусі 2 і усунення несправності Якщо значення живлюючих напруг в нормі, вони запам'ятовуються в певних чарунках вбудованого в ЦПК ОЗП Код команди ,що виконується, надходить в ОЗП ЦПК блоку керування 27 по послідовному каналу з персонального комп'ютера 36 Необхідну команду вибирає оператор з меню команд наведених на екрані переносного комп'ютера 36 в залежності від обстановки в зоні обстеження трубопроводу Якщо ЦПК блоку керування 27 визначив код команди "Уперед", то самохідний діагностичний робот в герметичному корпусі 2 приступає до виконання відповідної підпрограми При надходженні команди "Уперед" від переносного комп'ютера 36 також по послідовному каналу передається кодова посилка, що відповідає швидкості руху самохідного діагностичного робота в герметичному корпусі 2 і що запам'ятовується в певних чарунках ОЗП ЦПК блоку керування 27 На блок керування ходовим двигуном 22 від блоку керування 27 подається напруга, відповідна рівню логічної одиниці на входи СТОП/ПУСК При цьому відбувається включення гальванічне розв'язаного силового тиристора, в результаті чого підключаються обмотки С1-С2, СЗ-С4 ходового двигуна на напругу змінного струму 220В При подачі на вхід ІІцапі блоку керування 12 ходовим двигуном 22 від блоку керування 27 напруги ,яка ЛІНІЙНО ЗМІНЮЄТЬСЯ, відбувається плавне включення регулюючого гальванічне розв'язаного тиристора В результаті чого відбувається плавна зміна швидкості обертання валу ходового двигуна, за рахунок зміни величини напруги змінного струму що подається на обмотки С1-С2, СЗ-С4 На вхід УПЕРЕД/НАЗАД блоку керування ходовим двигуном 22 від блоку керування 27 подається напруга, відповідна рівню логічного нуля При цьому відбувається переключення керуючого реле, що, в свою чергу, веде до перекинення контактів Ш1-Ш2 на щітках двигуна Це веде до зміни напрямку обертання валу двигуна, тобто напрямку рухи самохідного діагностичного робота в герметичному корпусі 2 ЦПК блоку керування 27 передає в переносний комп'ютер 36 по послідовному каналу код завершення виконання команди "Уперед", що викликає появу ВІДПОВІДНОГО повідомлення на екрані переносного комп'ютера 36 ЦПК блоку керування 27 записує в чарунку команд вбудованого в нього ОЗП код, ВІДМІННИЙ ВІД ЩО використаються в системі, і вертається в основну програму керування самохідним діагностичним роботом в герметичному корпусі 2 При зтом ЦПК блоку керування 27 знову витягає команду з чарунки команд ОЗП і проводить її дешіфрацію Якщо код команди не відповідає коду команди "Уперед", ЦПК блоку керування 27 порівнює його з кодом команди "Назад" Якщо код команди співпав з кодом команди "Назад", те виконується відповідна підпрограма При надходженні команди "Назад" від переносного комп'ютера 36 також по послідовному каналу передається кодова посилка, що відповідає швидкості руху самохідного діагностичного робота в герметичному корпусі 2, яка запам'ятовується в певних чарунках ОЗП ЦПК блоку керування 27, відповідна рівню логічної одиниці ЦПК блоку керування 27 передає в переносний комп'ютер 36 по послідовному каналу код завершення виконання команди "Уперед", що викликає появу ВІДПОВІДНОГО повідомлення на екрані переносного комп'ютера 36 ЦПК блоку керування 27 записує в чарунку команд вбудованого в нього ОЗП код, ВІДМІННИЙ ВІД ЩО використаються в системі, і вертається в основну програму керування самохідним діагностичним роботом в герметичному корпусі 2 При цьому ЦПК блоку керування 27знову витягає команду з чарунки команд ОЗП і проводить її дешіфрацію Якщо код команди не відповідає коду "Назад", ЦПК блоку керування 27 порівнює його з кодом команди "МАНЕВР ЛІВОРУЧ" Якщо код команди співпав, те виконується відповідна підпрограма На вхід ВВІМК / ВИМИК блоку керування ходовою муфтою 29 від блоку керування 27 подається напруга, відповідна рівню логічного нуля При цьому відбувається включення гальванічне розв'язаного силового тиристора, в результаті чого підключаються обмотки С1 - С2 лівої ходової муфти на напругу змінного струму 220В, електромагніт ходової муфти спрацьовує, 13 49360 ведуче колесо гальмується і відбувається маневрування робота по ходу рухи ЦПК блоку керування 27 передає в переносний комп'ютер 36 по послідовному каналу код завершення виконання команди "МАНЕВР ЛІВОРУЧ", що викликає появу ВІДПОВІДНОГО повідомлення на екрані переносного комп'ютера 36 ЦПК блоку керування 27 записує в чарунку команд вбудованого в нього ОЗП код, ВІДМІННИЙ ВІД ЩО використаються в системі, і вертається в основну програму керування самохідним діагностичним роботом в герметичному корпусі 2 При цьому ЦПК блоку керування 27 знову витягає команду з чарунки команд ОЗП і проводить и дешіфрацію Якщо код команди не відповідає коду" МАНЕВР ЛІВОРУЧ", ЦПК блоку керування 27 порівнює його з кодом команди "МАНЕВР ПРАВОРУЧ" Якщо код команди співпав, то виконується відповідна підпрограма На вхід ВВІМК / ВИМИК блоку керування ходовою муфтою ЗО від блоку керування 27 подається напруга, відповідна рівню логічної одиниці При цьому відбувається включення гальванічне розв'язаного силового тиристора, в результаті чого підключаються обмотки С1 - С2 правої ходової муфти на напругу змінного струму 220В, ходові муфти спрацьовують, ведуче колесо гальмується і відбувається маневрування робота по ходу руху ЦПК блоку керування 27 передає в переносний комп'ютер 36 по послідовному каналу код завершення виконання команди "МАНЕВР ПРАВОРУЧ", що викликає появу ВІДПОВІДНОГО повідомлення на екрані переносного комп'ютера 36 ЦПК блоку керування 27 записує в чарунку команд вбудованого в нього ОЗП код, ВІДМІННИЙ ВІД що використаються в системі, і вертається в основну програму керування самохідним діагностичним роботом в герметичному корпусі 2 При цьому ЦПК блоку керування 27 знову витягає команду з чарунки команд ОЗП і проводить її дешіфрацію Якщо код команди не відповідає коду" МАНЕВР ПРАВОРУЧ", ЦПК блоку керування 27 порівнює його з кодом команди "ОБЕРТАННЯ КАМЕРИ ЛІВОРУЧ" Якщо код команди співпав, те виконується відповідна підпрограма При цьому ЦПК блоку керування 27 подає рівень логічної одиниці на вхід "Ліворуч / Праворуч" і вхід" СТОП / ПУСК" блоку керування осьовим двигуном відеокамери кольорового зображення 18 При цьому оптрони VI і V2, транзисторний перемикач 42 відкриваються і, як слідство, на мостову схему переключення 41 подається живильна напруга +27В Оптрон VI відкритий, висновок Я1 обмотки двигуна підключається до ланцюга+27В, а висновок Я2 - до загального проводу 2 ("Заг 2") ЦПК блоку керування 27 передає в переносний комп'ютер 36 по послідовному каналу код завершення виконання команди "ОБЕРТАННЯ КАМЕРИ ЛІВОРУЧ", що викликає появу ВІДПОВІДНОГО повідомлення на екрані переносного комп'ютера 36 ЦПК блоку керування 27 записує в чарунку команд вбудованого в нього ОЗП код, ВІДМІННИЙ від що використаються в системі, і вертається в основну програму керування самохідним діагностичним роботом в 14 герметичному корпусі 2 При цьому ЦПК блоку керування 27 знову витягає команду з чарунки команд ОЗП і проводить її дешіфрацію Якщо код команди не відповідає коду "ОБЕРТАННЯ КАМЕРИ ЛІВОРУЧ", ЦПК блоку керування 27 порівнює його з кодом команди" ОБЕРТАННЯ КАМЕРИ ПРАВОРУЧ" Якщо код команди співпав, те виконується відповідна підпрограма При цьому ЦПК блоку керування 27 подає рівень логічного нуля на вхід "Ліворуч / Праворуч" і рівень логічної одиниці на вхід" СТОП / ПУСК" блоку керування осьовим двигуном відеокамери кольорового зображення 18 При цьому оптрони VI і V2, транзисторний перемикач 42 відкриваються і, як слідство, на мостову схему переключення 41 подається живильне напруга +27 Оптрон VI закритий, висновок Я1 обмотки двигуна підключається до загального проводу 2 ("Заг 2"), а висновок Я2 - до ланцюга +27 В, що викличе обертання двигуна в зворотну сторону В іншому робота блоку аналогічна роботі при обробці команди «ОБЕРТАННЯ КАМЕРИ ЛІВОРУЧ" ЦПК блоку керування 27 передає в переносний комп'ютер 36 по послідовному каналу код завершення виконання команди" ОБЕРТАННЯ КАМЕРИ ПРАВОРУЧ", що викликає появу ВІДПОВІДНОГО повідомлення на екрані переносного комп'ютера 36 ЦПК блоку керування 27 записує в чарунку команд вбудованого в нього ОЗП код, ВІДМІННИЙ від що використаються в системі, і вертається в основну програму керування самохідним діагностичним роботом в герметичному корпусі 2 При цьому ЦПК блоку керування 27 знову витягає команду з чарунки команд ОЗП і проводить її дешіфрацію Якщо код команди не відповідає коду" ОБЕРТАННЯ КАМЕРИ ПРАВОРУЧ", ЦПК блоку керування 27 порівнює його з кодом команди "КАМЕРА УВЕРХ" Якщо код команди співпав, те виконується відповідна підпрограма При цьому ЦПК блоку керування 27 подає рівень логічної одиниці на вхід "УВЕРХ / УНИЗ і вхід" СТОП / ПУСК" блоку керування азимутальним двигуном 20 В подальшому робота блоку аналогічна роботі блоку керування осьовим двигуном 18 описаної вище ЦПК блоку керування 27 передає в переносний комп'ютер 36 по послідовному каналу код завершення виконання команди "КАМЕРА УВЕРХ", що викликає появу ВІДПОВІДНОГО повідомлення на екрані переносного комп'ютера 36 ЦПК блоку керування 27записує в чарунку команд вбудованого в нього ОЗП код, ВІДМІННИЙ від що використаються в системі, і вертається в основну програму керування самохідним діагностичним роботом в герметичному корпусі 2 При цьому ЦПК блоку керування 27 знову витягає команду з чарунки команд ОЗП і проводить її дешіфрацію Якщо код команди не відповідає коду" КАМЕРА УВЕРХ", ЦПК блоку керування 27 порівнює його з кодом команди" КАМЕРА УНИЗ" Якщо код команди співпав, то виконується відповідна підпрограма При цьому ЦПК блоку керування 27 подає рівень логічного нуля на вхід "УВЕРХ / УНИЗ і рівень логічної одиниці на вхід" СТОП / ПУСК" блоку 15 49360 керування азимутальним двигуном відеокамери кольорового зображення 20 В подальшому робота блоку аналогічна роботі блоку керування азимутальним двигуном відеокамери кольорового зображення 20 при обробці команди "КАМЕРА УВЕРХ" описаної вище ЦПК блоку керування 27 передає в переносний комп'ютер 36 по послідовному каналу код завершення виконання команди "КАМЕРА УНИЗ", що викликає появу ВІДПОВІДНОГО повідомлення на екрані переносного комп'ютера 36 ЦПК блоку керування 27 записує в чарунку команд вбудованого в нього ОЗП код, ВІДМІННИЙ ВІД ЩО використаються в системі, і вертається в основну програму керування самохідним діагностичним роботом в герметичному корпусі 2 При цьому ЦПК блоку керування 27 знову витягає команду з чарунки команд ОЗП і проводить її дешіфрацію Якщо код команди не відповідає коду" КАМЕРА УНИЗ", ЦПК блоку керування 27 порівнює його з кодом команди" ВМИК ОСВІТЛЕННЯ" Якщо код команди співпав, те виконується відповідна підпрограма При надходженні команди "ВМИК ОСВІТЛЕННЯ" від переносного комп'ютера 36 по послідовному каналу також передається кодова посилка відповідна необхідної освітленості на пристрій освітлення 23, що запам'ятається в певних чарунках вбудованого ОЗП ЦПК блоку керування 27 Останній подає рівень логічного нуля на вхід "ВМИК/ ВИМИК" блоку керування пристроєм освітлення 24 При цьому транзистор V8 останнього закривається, дозволяючи, таким чином, проходження напруги ІІцап ламп від блоку керування 27 на перший вхід мультивібратора з перебудованою ЩІЛИННІСТЮ імпульсів 51 через резистор Р16, на другий вхід якого подана напруга +15В 3 виходу блоку керування 27 подається ЛІНІЙНО наростаюча напруга Ццап ламп від 0В до напруги відповідної кодовій посилці, отриманої від переносного комп'ютера 36 на вхід ІІцап ламп блоку керування пристроїм освітлення 24 Ця напруга через резистор К16 надходить на перший вхід мультивібратора з перебудованою ЩІЛИННІСТЮ імпульсів 51 В залежності від величини напруги ІІцап ламп на виході останнього генерується імпульсна напруга відповідна Ццап ламп, що надходить на анод діоду оптрону V9 Ця напруга перетворюється в світловий потік, що приводить до спрацьовування транзистора оптрону V9, з колектора якого імпульсна, гальванічне розв'язана напруга, надходить на перший вхід напівпровідникового реле 52, на другий вхід якого подається напруга +27В Напівпровідникова реле 52 спрацьовує і напруга з його першого виходу подається на лампи Е1-Е4 пристрою освітлення 23 Так як останні володіють більшим значенням шерційності, вони виконують інтегрування на них напруги, що надходить Таким чином, змінюючи напругу ІІцап ламп, шляхом зміни одержаної від переносного комп'ютера 36 кодової посилки, змінюється степінь освітленості пристрою освітлення 23 ЦПК блоку керування 27 передає в переносний комп'ютер 36 по послідовному каналу код завершення виконання команди "ВМИК ОСВІТЛЕННЯ", що викликає появу ВІДПОВІДНОГО 16 повідомлення на екрані переносного компютера 36 ЦПК блоку керування 27 записує в чарунку команд вбудованого в нього ОЗП код, ВІДМІННИЙ ВІД що використаються в системі, і вертається в основну програму керування самохідним діагностичним роботом в герметичному корпусі 2 При цьому ЦПК блоку керування 27 знову витягає команду з чарунки команд ОЗП і проводить її дешіфрацію Якщо код команди не відповідає коду" ВМИК ОСВІТЛЕННЯ", ЦПК блоку керування 27 порівнює його з кодом команди" ВМИК УФ лампу»" Якщо код команди співпав, те виконується відповідна підпрограма При цьому ЦПК блоку керування 27 подає рівень логічної одиниці на вхід "ВВІМК/ ВИМИК УФ лампу" блоку керування ультрафіолетовою лампою 25 При цьому відбувається включення гальванічне розв'язаного силового тиристора, в результаті чого підключається нитка розжарювання УФ лампи на напругу змінного струму 220В Якщо код команди не відповідає коду" ВМИК УФ лампу", ЦПК блоку керування 27 порівнює його з кодом команди" ВМИК впускний клапан" Якщо код команди співпав, те виконується відповідна підпрограма При цьому ЦПК блоку керування 27подає рівень логічної одиниці на вхід "уск1" блоку керування електромагнітними клапанами 8 При цьому відбувається включення гальванічне розв'язаного силового тиристора, в результаті чого підключаються обмотки електромагнітного клапана 6 на напругу змінного струму 220В по єднальному кабелю 14 електромагнітний клапан 6 відкривається і повітря високого тиску по живильному шлангу 10 з балону стислого повітря 5 подається в порожнину надувного гумового рукаву з затиснутими торцями ремонтного модуля 1 ЦПК блоку керування 27 передає в переносний комп'ютер 36 по послідовному каналу код завершення виконання команди" ВМИК впускний клапан", що викликає появу ВІДПОВІДНОГО повідомлення на екрані переносного комп'ютера 36 ЦПК блоку керування 27 записує в чарунку команд вбудованого в нього ОЗП код, ВІДМІННИЙ ВІД що використаються в системі, і вертається в основну програму керування самохідним діагностичним роботом в герметичному корпусі 2 При цьому ЦПК блоку керування 27 знову витягає команду з чарунки команд ОЗП і проводить її дешіфрацію Якщо код команди не відповідає коду" ВМИК впускний клапан," ЦПК блоку керування 27 порівнює його з кодом команди" ВИМИК впускний клапан" Якщо код команди співпав, те виконується відповідна підпрограма При цьому ЦПК блоку керування 27 подає рівень логічної одиниці на вхід "уск1" блоку керування електромагнітними клапанами 8 При цьому відбувається включення гальванічне розв'язаного силового тиристора, в результаті чого підключаються обмотки випускного електромагнітного клапана 7 на напругу змінного струму 220В по єднальному кабелю 14 Клапан відкривається і повітря з надувного гумового рукава з затиснутими торцями ремонтного модуля 1 по випускному шлангу 13 випускається в атмосферу ЦПК блоку керування 27 знову витягає 17 команду з чарунки команд вбудованого в ЦПК ОЗП і приступає до її дешіфрацм Описаний вище алгоритм читання команд з ОЗП блоку керування 27 і їх дешіфрація виробляються самохідним діагностичним роботом в герметичному корпусі 2 безупинно до моменту його вимкнення оператором Аналоговій сигнал з датчика тиску 4 надходить на вторинний перетворювач тиску 9 Посилений сигнал з останнього по єднальному кабелю 14 надходить на вхід СД блоку керування 27 Блок керування 27 перетворює сигнал тиску в цифрову форму і передає в переносний комп'ютер 36 по послідовному каналу Значення тиску в порожнині надувного гумового рукава з затиснутими торцями ремонтного модуля 1 відображається на екрані комп'ютера В салоні лабораторії розміщена бортова частина - пристрій керування , живлення і візуалізацм інформації З самохідного діагностичного робота в герметичному корпусі 2 Бензогенератор 37 живить переносний комп'ютер 36, блок живлення діагностичного робота 27, знакогенератор 33, відеомагнітофон 36 Кольорове зображення відеокамери 15, де воно перетворюється в електричний сигнал, посилюється відеопідсилювачем 16 і по кабелю з металічним обплетенням 32 надходить на перший вхід знакогенератора 33, де він складається з сигналом датчика шляху 31 Сумарний відеосигнал з виходу знакогенератора 33 надходить на перші входи відеомагнітофону 35 і кольорового телевізору 34 Відеомагнітофон 35 запам'ятовує відеосигнал на магнітній стрічці, а на кольоровому телевізорі 34 він візуалізується Складання сигналів, що надходять від датчика шляху 31 з сигналом, що знімаються з відеокамери 15 Дозволяє виробляти прив'язку ДІЛЬНИЦІ поверхні ,що діагностується внутрішньої трубопроводу з відстанню від крапки почала діагностики Сигнал від датчика шляху 31 разом з зображенням внутрішньої поверхні трубопроводу візуалізується на екрані кольорового телевізору 34 і запам'ятовується на магнітній стрічці відеомагнітофону 35 На екрані переносного комп'ютера 36 зображено меню команд самохідного діагностичного робота в герметичному корпусі 2 і візуалізуються параметри його стану і хід виконання команд Необхідну команду, в залежності від конкретної ситуації всередині трубопроводу, оператор вибирає з наведеного меню за допомогою клавіатури або "Мишки", що входять в комплект переносного комп'ютера 36 Зв'язок самохідного діагностичного робота в герметичному корпусі 2 і переносного комп'ютера 36 здійснюється через послідовний порт, який також є складником переносного комп'ютера 36 Для зв'язку використаються стандартні, гостировані сигнали послідовного каналу ТхО і КхО По сигналу ТхО в послідовному коді передаються команди керування самохідним діагностичним роботом в герметичному корпусі 2, а по сигналу КхО переносний комп'ютер 36 приймає від останнього параметри його стану і хід їх виконання Самохідний діагностичний робот в герметичному корпусі 2 з бортовою частиною 49360 18 пристроєм керування , живлення і візуалізацм отриманої інформації 3 зв'язаний кабелем з металічним обплетенням 32 Перед початком роботи системи для ремонту трубопроводу на надувний рукав ремонтного робота 1 завдається клеєва основа попередньо обробивши гуму останнього тонким шаром машинного мастила Через технологічний отвір в трубопровід вводиться ремонтний модуль 1, слідом за ним діагностичний робот в герметичному корпусі 2 Далі вони з'єднуються електричне і механічно між собою Після ЦЬОГО підключається до діагностичного роботу в герметичному корпусі 2 кабель з металічним обплетенням 32 який надходить з лебідки 38, включається бензогенератор 37, який забезпечує живлення 220 В всій апаратурі Включаються телевізор кольорового зображення 34, відеомагнітофон 35, знакогенератор 33, персональний комп'ютер 36 і подається живлення на діагностичний робот в герметичному корпусі 2 і ремонтний модуль 1 Діагностичний робот в герметичному корпусі 2 при подачі живлення проводить діагностику дієздатності своїх вузлів і блоків і ремонтного модуля 1 Результат діагностики відображається на екрані персонального комп'ютера 36 як описано вище Якщо результат діагностики позитивний, то оператор виконує, в залежності від логічних ситуацій в трубопроводі, команди що подаються на діагностичний робот в герметичному корпусі 2, а саме, Уперед/Назад, Включити / Вимкнути і так далі, що описані вище При цьому, при русі ремонтного робота 1 і діагностичного робота в герметичному корпусі 2 на екрані телевізору кольорового зображення 34 відображається внутрішня поверхня трубопроводу Відстань від місця впуску системи до поточного місця відображається на нижній частині екрану телевізору кольорового зображення 34 Ця інформація надходить від датчика шляху 31 і знакогенератора 33 Побачивши на екрані пошкодження трубопроводу, оператор підводить центр ремонтного модуля 1 до пошкодження і виконується команда роздути роздувний гумовий рукав, що описана вище При цьому, клеєва ремонтна обичайка доставляється до внутрішньої поверхні трубопроводу і заповнює пошкодження В залежності від технології склеювання, яка визначається типом клея що застосується, діагностичний робот в герметичному корпусі 2 автоматично підтримує в роздувному гумовому рукаві необхідний тиск і підтримує подібний стан, в залежності від технологи, певний час, що також автоматично контролюється системою для ремонту трубопроводу Закінчення процесу ремонту візуалізується в вигляді повідомлення на екрані персонального комп'ютера 36 При цьому, оператор видає команду«Включити випускний клапан» і відбувається висновок через випускний шланг 13 стислого повітря в атмосферу по раніше описаній програмі Видаючи команди діагностичному роботу в герметичному корпусі 2 Уперед / Назад, камера - Ліворуч / Праворуч, Уверх / Униз, робота яких описана вище, оператор перевіряє якість ремонту, отримавши зображення 19 ДІЛЬНИЦІ трубопроводу, яка відремонтована, на екрані телевізору кольорового зображення 34 Після ЧОГО видається команда закінчення ремонту по раніше описаному алгоритму і діагностичний робот 2 і ремонтний модуль 1 витягують з трубопроводу через технологічний отвір Якщо в якості ремонтних клеїв застосовуються клей, полімеризація яких відбувається під впливом ультрафіолетових променій, ремонт відбувається наступним чином Доставка клею до пошкодженого трубопроводу така же як описана вище за винятком того, що закінчення сушіння виробляється під впливом ультрафіолетових променій, шляхом подачі команди Включити / Вимкнути ультрафіолетову лампу Витяг системи 20 49360 для ремонту трубопроводу аналогічно описаному вище В НИНІШНІЙ час виробляється виготовлений експериментальний зразок системи ,що пропонується Його іспити показують ДОЦІЛЬНІСТЬ застосування системи ,що пропонується, особливо в умовах забудованих районів міст а також у місцях пересічення трубопроводів із залізничними, трамвайними та автомобільними шляхами, так як забезпечується гарна маневреність, швидке знаходження місця пошкодження, висока надійність, поширений спектр клеїв, що застосуються, значно знижені витрати і час ремонту 21 22 49360 Фіг 2 22№ 23 24 49360 Уперед/назад Фіг. 5 25 49360 26 27 28 49360 +27B +15 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044) 456 - 20 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for pipeline repair
Автори англійськоюMaslak Viktor Mykolaiovych, Baranov Yurii Viacheslavovych
Назва патенту російськоюСистема для ремонта трубопроводов
Автори російськоюМаслак Виктор Николаевич, Баранов Юрий Вячеславович
МПК / Мітки
МПК: F16L 55/18
Мітки: ремонту, трубопроводів, система
Код посилання
<a href="https://ua.patents.su/14-49360-sistema-dlya-remontu-truboprovodiv.html" target="_blank" rel="follow" title="База патентів України">Система для ремонту трубопроводів</a>
Система телеінспекції трубопроводів
Номер патенту: 40855
Опубліковано: 16.12.2002
Автори: Баранов Юрій Вячеславович, Маслак Віктор Миколайович, Бондар Анатолій Юрьйович, Петровський Артур Адамович
МПК: F16L 55/16
Мітки: система, телеінспекції, трубопроводів
Формула / Реферат:
Система телеінспекції трубопроводів, що містить самохідний діагностичний робот в герметичному корпусі, складений з освітлювальних пристроїв, відеокамери кольорового зображення, розміщеної у головній його частині, на башті, оптично зв‘язаній з трансфокатором, перший вхід її з'єднаний з блоком живлення, перший вихід - з першим входом відеопідсилювача, другий вхід останнього підключений до блока живлення, а перший вихід - до кабелю, з'єднаного з...
Спосіб безтраншейного ремонту трубопроводів
Номер патенту: 37052
Опубліковано: 15.01.2004
Автори: Шипко Іван Іванович, Гарник Володимир Кирилович
МПК: F16L 1/028, F16L 58/02
Мітки: ремонту, безтраншейного, спосіб, трубопроводів
Формула / Реферат:
Спосіб безтраншейного ремонту трубопроводів, що включає введення в трубопровід облицювальної пластикової труби з попередньо встановленими центруючими елементами, заповнення міжтрубного простору під тиском пластичним розчином, який відрізняється тим, що на пластикову трубу встановлюють в шахматному порядку центруючі елементи, трубу з центруючими елементами вводять в трубопровід, останній оснащують рознімними двоступінчастими наконечниками з...
Спосіб ремонту напірних трубопроводів
Номер патенту: 66549
Опубліковано: 17.05.2004
Автори: Чорний Анатолій Петрович, Шостак Олексій Іванович, Петросов Валерій Альбертович, Мацюк Петро Васильович
МПК: F16L 55/00, E03B 7/00, F16L 21/00
Мітки: спосіб, ремонту, напірних, трубопроводів
Формула / Реферат:
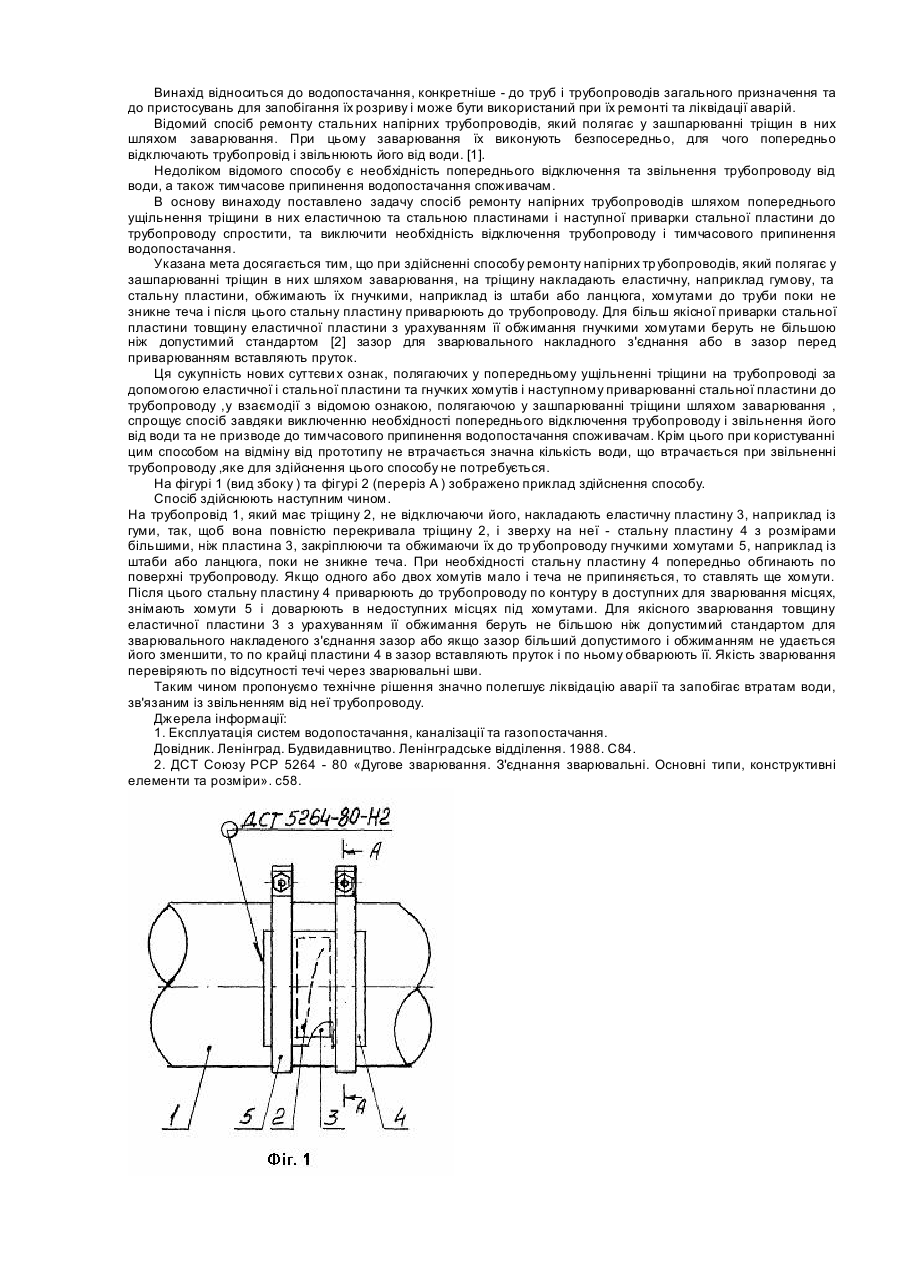
1. Спосіб ремонту напірних трубопроводів, що включає зашпаровування тріщин в них шляхом заварювання, який відрізняється тим, що на тріщину накладають еластичну, наприклад гумову, та стальну пластини, обтискаючи їх гнучкими, наприклад із штаби або ланцюга, хомутами до труби поки не зникне теча і після цього стальну пластину приварюють до трубопроводу.2. Спосіб за п. 1, який відрізняється тим, що для більш якісної приварки стальної...
Багатофункціональний пристрій для ремонту трубопроводів, прокладених на болотах та обводнених грунтах
Номер патенту: 53787
Опубліковано: 17.02.2003
Автори: Москвич Вячеслав Михайлович, Гнатюк Ігор Васильович
МПК: F16L 55/18
Мітки: болотах, пристрій, трубопроводів, обводнених, багатофункціональний, ремонту, грунтах, прокладених
Формула / Реферат:
1. Багатофункціональний пристрій для ремонту трубопроводів, прокладених на болотах і обводнених ґрунтах, що містить корпус у вигляді прямокутного короба з дном і арковими вирізами на торцевих стінках для охоплення трубопроводу, що ремонтується, та герметизації його робочої порожнини щодо навколишньої болотної маси і води, шарнірно закріплені силові гідроциліндри і трубопровід із розмивочними соплами для розмиву ґрунту, який відрізняється тим,...
Спосіб безтраншейного ремонту трубопроводів та пристрій для його здійснення
Номер патенту: 45648
Опубліковано: 15.04.2002
Автори: Зайцев Леонід Павлович, Шипко Іван Іванович
МПК: F16L 55/02
Мітки: спосіб, трубопроводів, безтраншейного, здійснення, пристрій, ремонту
Формула / Реферат:
1. Спосіб безтраншейного ремонту трубопроводів, який включає зведення в трубопровід облицювальної пластикової труби з передчасно встановленими центруючими елементами, закріплення на трубопроводі двоступінчастих наконечників з патрубками, заповнення міжтрубного простору під тиском пластичним розчином, який відрізняється тим, що центруючі елементи на твірній пластикової труби кріплять один від одного на відстані, при якій допустима величина...
Попередній патент: Пристрій індукційного нагріву
Наступний патент: Спосіб вилучення вільних жирних кислот із жирів і олій біологічного походження або їхніх парових дистилятів
Випадковий патент: Пристрій для електронної компенсації похибки вимірювальних трансформаторів напруги