Завантажувальний пристрій шахтної печи
Формула / Реферат
(57) 1. ЗАГРУЗОЧНОЕ УСТРОЙСТВО ШАХТНОЙ ПЕЧИ, содержащее приводной лоток, механизм органов управления качанием и вращением лотка с командным органом, вертикальный канал для подачи из шихтовых бункеров в печь материалов, причем лоток установлен между двумя ветвями вилки-подвески, имеющей неподвижную поддерживающую раму, а приводная силовыми гидроцилиндрами вилка-подвеска выполнена с возможностью совместного поворота с лотком, отличающееся тем, что, с целью повышения срока службы механизма и облегчения веса конструкции, лоток снабжен механизмом дополнительного поворота вилки и желоба вокруг второй оси и сервоприводом согласования движения лотка от командного органа, при этом первый гидроцилиндр установлен цапфами на вилке подвески лотка, а второй - нанеподвижной раме, поддерживающей вилку.
2. Устройство по п. 1, отличающееся тем, что командный орган установлен на валу вилки-подвески по средством универсального шарнира, связан с приводом его вращенияи поворота и снабжен щупами, соединенными с этим органом и через электронный блок сервопривода с силовыми гидроцилиндрами.
3. Устройство по пп. 1 и 2, отличающееся тем, что оно снабжено предохранительными механизмами в виде эластичных соединенийи фиксаторов.
4. Устройство по пп. 1, 2 и 3, отличающееся тем, что эластичные соединения и фиксаторы размещены между универсальным шарниром и валом.
5. Устройство по пп. 1, 2 и 3, отличающееся тем, что оно снабжено внутренней, поддерживающей универсальный шарнир, и внешней, жестко соединенной с валом, рамками, в четырех углах которых размещены эластичные соединения и фиксаторы.
6. Устройство по пп. 1, 2 и 3, отличающееся тем, что оно снабжено размещенной между внутренней и внешней рамками промежуточной рамкой, а эластичные соединенияи фиксаторы расположены между промежуточной и внешней рамками.
Текст
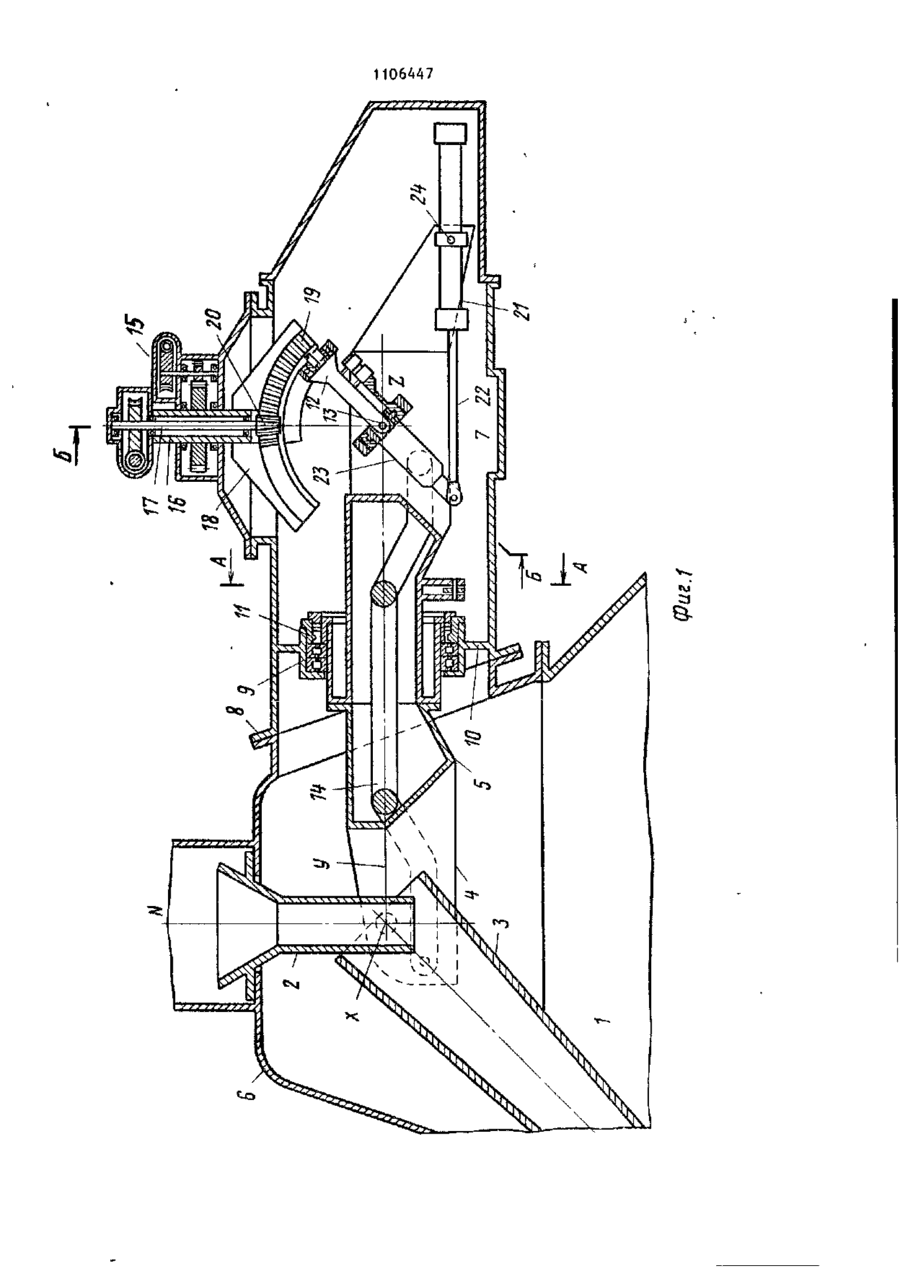
СОЮЗ СОВЕТСКИХ СОЦИАЛИСТИЧССКИХ РЕСПУБЛИК 3 ( 5 D С 21 В 7/20 ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССР ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ И ПАТЕНТУ (21) (22) О1) (32) 3413601/22-02 30.03.82 83370 18.05.81 " ** (33) Люксембург (46) 30.07.84. Бюл. № 28 (72) .Эдуард Лежилль и Пьер Мэлье (Люксембург) (71) Поль Вюрт С.А. (Люксембург) (53) 669.162.25(088.8) (56) 1. Патент СССР № 833167, кл. С 21 В 7/18, 1978. (54) (57) 1. ЗАГРУЗОЧНОЕ УСТРОЙСТВО ШАХТНОЙ ПЕЧИ, содержащее приводной лоток, механизм органов управления качанием и вращением лотка с командным органом, вертикальный канал для подачи из шихтовых бункеров в лечь материалов, причем лоток установлен между дЪумя ветвями вилки-подвески, имеющей неподвижную поддерживающую раму, а приводная силовыми гидроцилиндрами вилка-подвеска выполнена с возможностью совместного поворота с лотком, о т л и ч а ю щ е е с я тем, что, с целью повышения срока службы механизма и облегчения веса конструкции, лоток снабжен механизмом дополнительного поворота вилки и желоба вокруг второй оси и сервоприводом согласования движения лотка от командного органа, при этом первый гидроцилиндр установлен цяпфами на вилке подвески логка, а второй - на неподвижной райе, поддерживающей вилку. 2. Устройство по и. 1, о т л и ч а ю ш е е с я тем, что командный орган установлен на 'валу вилки-подвески посредством универсального шарнира, связан с приводом его вращения и поворота и снабжен щупами, соединенными с этим органом и через электронный блок сервопривода с силовыми іидроцилиндрами. 3. Устройство по пп. 1 и 2, о т л и ч а ю щ е е с я тем, что оно снабжено предохранительными механизмами в виде эластичных соединений и фиксаторов, 4. Устройство по пп. 1, 2 и 3, о т л и ч а ю щ е е с я тем, что эластичные соединения и фиксаторы размещены между универсальным шарниром и валом. 5. УСТРОЙСТВО ПО ПП. 1t 2 и 3, о т л и ч а ю щ е е с я тем, что оно снаОжено внутренней, поддерживчш шеи универсальный шарнир, и внешней, жестко соединенной с валом, рамками, в четырех углах которых размещены эластичные соединения и фиксаторы. 6. Устройство по пп. 1, 2 и 3, о т л и ч а ю щ е е с я тем, что оно снабжено размещенной между внутренней и внешней рамками промежуточной рамкой, а эластичные соединения и фиксаторы расположены между промежуточной и внешней рамками. 1106447 f Изобретение относится к черной Эластичные соединения и фг*р г металлургии, в частности к устройстразмещены между универсальным шарнивам загрузки доменных печей. ром и валом. Устройство снабжено внутренней, Наиболее близким к предлагаемому по технической сущности и достигаєj поддерживанлцей универсальный шарнир, и внешней, жестко соединенной с вамому результату является загрузочное лом, рамками, в четырех углах котоустройство шахтной печи, содержащее рых размещены эластичные соединения приводной лоток, механизмы органов и фиксаторы. управления качанием и вращением лотка с командным органом, вертикальный to Устройство снабжено размещенной канал для подачи из шихтовых бункеров между внутренней и внешней рамками в печь материалов, причем лоток устапромежуточной рамкой, а эластичные новлен между двумя ветвями вилкисоединения и фиксаторы расположены подвески, имеющей неподвижную подмежду промежуточной и внешней рамдерживающую раму, а приводная сило- is ками. выми гидроцилиндрами вилка-подвеска На фиг. 1 схематически показана выполнена с возможностью совместного головка шахтной печи согласно первоповорота с лотком [1J . му варианту исполнения загрузочного устройства, вертикальный разрез по Недостатками данного устройства диаметральной плоскости; на фиг. 2 являются тяжеловесность конструкции 20 разрез Л-А на фиг. 1; на фиг. 3 и значительные механические воздейстразрез Б-Б на фиг. 1; на фиг. 4 вия, оказываемые весом желоба и вилразрез части фиг. 3 под углом 90°по ки подвески на командный орган и отношению к плоскости этой фигуры; приводной механизм. Цель изобретения - повышение сро- 25 на фиг. 5 - разрез В-В па фиг. 3; на фиг. 6 - вариант предохранителька службы механизма и облегчение веного устройства, показанного на фиг.З са конструкции. и 5; на фиг. 7 - схема первого вариПоставленная цель достигается анта исполнения цепи системы сервотем, что в загрузочном устройстве шахтной печи, содержащее приводной ^Q привода; на фиг. 8 ~ второй вариант исполнения механизма управления двилоток, механизмы органов управления жением желоба; на фиг. 9 - рачрез качением и вращением лотка с командГ-Г на фиг. 8; на фиг. 10 - приводной ным органом, вертикальный канал для механизм командного органа и устройподачи из шихтовых бункеров в печь ство для возбуждения инструктивных материалов, причем лоток установлен 35 сигналов; на фиг. 11 схема принципа между двумя ветвями вилки-подвески, действия устройства на фиг. 10, имеющей неподвижную поддерживающую вид в плане; на фиг. 12 - схема варираму, а приводная силовыми гидроцианта исполнения системы сервоприлиндрами вилка-подвеска выполнена вода согласно фиг. 8. с возможностью совместного поворота 40 с лотком, лоток снабжен механизмом На фиг. 1 позиция 1 обозначает дополнительного поворота вилки и жеголовку доменной печи под давлением, лоба вокруг второй оси и сервопривов которую должно быть засыпано дом согласования движения лотка от загружаемое вещество из верхнего командного органа, при этом первый шлюза (не доказан) через вертикаль- . 45 гидроцилиндр установлен цапфами на ный питающий канал 2 у расположенный •вилке подвески лотка, а второй - на 'по вертикальной оси 0 в своде головнеподвижной раме,поддерживающей вилку. іки доменной печи. Распределение заКомандный орган может быть устагружаемого вещества, вводимого через новлен на валу вилки-подвески посредканал 2, осуществляется с помощью ством универсального шарнира, связан 50 вибрационного желоба 3, имеющего прес приводом его вращения и поворота имущественно форму усеченного конуса. и снабжен щупами, соединенными с Вибрационный желоб 3 подвешен между этим органом и через электронный двумя ветвями (из которых одна блок сервопривода с силовыми гидроветвь А является видимой) вилки 5, цилиндрами . 55 которая установлена в боковой стенке корпуса 6 головки 1 печи так, чтобы Устройство снабжено предохранииметь возможность поворачиваться тельными механизмами в виде эластичвокруг своей продольной оси у . Незаных соединений и фиксаторов. 1106447 висимо or этой возможности поворота вилки 5 вокруг оси у вибрационный жалоб 3 может поворачиваться вокруг своей оси подвески X между двумя ветвями вилки 5. 5 Вилка 5 установлена герметичным образом в стенке, отделяющей картер 7 управления и привода от внутренней полости головки 1 печи, причем картер 7 установлен разъемным ^ образом на фланце 8 корпуса 6. Чтобы иметь возможность поворачиваться вокруг продольной оси у , вилка 5 размещена в шарикоподшипни5 ке 9, предусмотренном в разделитель- ' ной стенке 10. Этот шарикоподшипник может быть объединен г уплотнительным устройством 11 для избежания давления в картер 7. Уплотнительное устройство 11 может от сутствовать, 20 если в картере предусмотрено давление , приблизительно равное давлению во внутренней полости головки 1 печи. Внутри картера 7 находится командный орган 12, установленный на вра- 2 5 щающемся валу 13 , проходящий через вилку 5 и имеющий возможность поворачиваться вокруг своей оси ¥>. Вал 13 установлен так, чтобы его ось й была строго параллельной оси вращения X 30 желоба 3. Командный орган 12, имеющий возможность поворачиваться с валом 13 вокруг оси £, а также вокруг оси У вместе с вилкой 5, обладает, следовательно, теми же степенями свободы, 35 что и желоб 3, и наоборот. Командному органу 12 сообщается движение, осуществляемое желобом 3. Дпя этой цели внутри вилки 5 предусмотрено устройство 1А передачи дви- 40 жения, соединенное, с одной стороны, прямо или косвенно с осью X вращения желоба 3 и, с другой стороны, при помощи рычага с командным органом 12 так, чтобы образовать систему в форме 45 параллелограмма, который трансформирует повороты командного органа 12 'вокруг оси 2 в повороты желоба 3 вокруг оси X. Механизм (фиг. 1) содержит двига- 5 Q тель 15, установленный снаружи, преимуществен^ съемным образом, на картере 7. Два коаксиальных командных вала 16 и 17 проникают из двигателя 15 через шарикоподшипники, обычно 55 сальники, внутрь картера 7. Один из этих командных валов, в данном случае внешни]"; командный вал 16, несет внутри картера 7 изогнутую направляю щую 18 в форме дуги окружности, угол которой соответствует двойному углу максимального наклона желоба относительно оси 0. Зубчатый сектор 19, образующий реечное соединение с шестерней 20, жестко связанной с внутренним 'командным валом 17, удерживается скользящим образом на вогнутой стороне направляющей 18. Между концом командного органа 12 и одним из двух концов зубчатого сектора 19 предусмотрено вращающееся соединение Вращение внешнего командного вала 16 обеспечивает попорот направляющей 18 и зубчатого сектора 19 вокруг оси 1 , параллельной оси N печи, и вызывает коническое прецессионное движение командного органа 12 вокруг той же оси с . Движение командного * органа 12 является возможным благодаря координированным поворотам вилки 5 вокруг оси У и органа 12 вокруг оси Й, воспроизводящим коническое процессионное движение органа 12 точно на желоб 3. Вращение внутреннего командного вала 17 служит для перемещения зубчатого сектора 19 и изменения угла наклона командного органа 12 по отношению к оси t . Командный орган 12 осуществляет командную и движущую функции, приводя в действие посредством комплекта рычагов желоб 3. При этом командный орган 12 подвергается сильным механическим воздействиям. Чтобы избежать этих воздействии, командный орган 12 лишают движущих функций таким образом, чтобы он выполнял исключительно командную функцию. Для обеспечения выполнения команд ным органом только командных функций предлагается для приводного механизма поворота вилки 5 и желоба 3 использовать гидроцилиндры вместо того, чтобы отбирать эту мощность от приходных механизмов командного органа 12. На фиг. 1 изображен первый силовой гидроцилиндр 21, шток поршня 2? которого воздействует на рычаг 23, жестко связанный с вращающимся валом 13, с которым соединен командный орган 12. На рычаге 23 также шаинирно закреплено трансмиссионное устройство 14 так, чтобы действие силового гидроцилиндра 21 вызывало поворот командного органа 12 вокруг оси 2 и одновременный поворот желоба вокруг его оси подвески X. 1106447 Принимая во внимание, что конец штоОрган 12 установлен на валу 34 „ разка поршня 22, который шарнирно замещенном в рамке 35 и допускающем креплен на рычаге 23, должен осущеповороты органа 12 вокруг оси Z. ствлять маятниковое движение вокруг Рамка 35 установлена посредством оси В, силовой гидроцилиндр 21 дол5 шипов 36, позволяющих ей поворачижен иметь возможность поворота воваться вокруг второй оси, перпендикруг оси, параллельной оси Z. Для кулярной оси Z. этой цели силовой гидроцилиндр 21 Повороты, производимые на уровне установлен с помощью цапф 24 на задкарданного шарнира 33, либо под дейаем конце вилки 5. Ю ствием двигателя 15, либо под действием желоба 3, определяются парой Второй гидроцилиндр 25 (фиг. 2) щупов 37 и 38, объединенных с кодействует перпендикулярно первому мандным оганом 12 и жестко закрепленсиловому гидроцилиндру 21 и установных на валу 13. Эти щупы, в действилен цапфами (не показаны) на стенке камеры 7, его шток 26 непосредствен- 15 тельности, являются чувствительными органами из двух позиционных датчино шарнирно закреплен на вилке 5, ков 39 и 40, сигнализирующих о любом чтобы поворачивать последнюю с поотклонении от нейтрального положения, мощью шарикоподшипника 9 вокруг отклонении, которое должно компенсиоси У. Б действительности вилка 5 явля20 роваться координированным действием на силовые гидроцилиндры 21 и 25. ется двойной, содержащей, кроме двух Щуп 37 обнаруживает отклонения пововетвей, между которыми подвешен ротами, возникающими на уровне шижелоб 3, две ветви на противоположпов 36, и управляет компенсацией их ном конце для установки вращающегося вала 13. На фиг. 3 представлен мон- 25 поворотов, воздействуя на силовой гидроцилиндр 25. Щуп 38, который сметаж вращающегося вала 13 между двумя щен на 90°по отношению к щупу 37, обветвями 27 и 28 вилки. Детали монтанаруживает аналогичным образом повожа показаны только для ветви 28. роты, осуществляемые вокруг оси Z, Шарикоподшипники 29 позволяют валу 13 вращаться вокруг оси, тогда как зо и управляет компенсацией этих поворотов действием на силовой гидроциуплотнительные средства (не показаны) линдр 21. позволяют охлаждающей жидкости циркулировать внутри всей вилки 5. ДвиНа фиг. 6 показано действие управжение поворота вала 13 вокруг оси ления, осуществляемого датчиком 40. трансформируется посредством рыча, Такие датчики хорошо известны, они гов ЗО в движение перемещения трансмогут быть электрическими, механичесмиссионного механизма в форме двойкими, гидравлическими и оптическими. ной вилки, движущейся внутри вилки 5. Когда действие двигателя на командный орган 12 или действие желоба 3 Для облегчения демонтажа предпочтительно составлять рычаг 13 из не- 4 0 на вал 13 вызывает или допускает смещение дх от его нейтрального положескольких кусков, что реализуется винния, позиционный датчик 40 произвотом 31 (фиг. 3) аксиально проходящим дит электрический сигнал I=f(ftx), через конец вала и обеспечивающим его который является функцией разницы жесткость. Обе части, удерживаемые вместе (позиция 32) винтом 31, прей- 4 5 между реальным положением щупа 38 и его нейтральным положением. Этот мущественно снабжены щеками, каждая сигнал может, кроме того, быть полоиз которых содержит кольцо из радиаль жительным или отрицательным по наных желобков. Монтаж вала ІЗ в ветправлению действия на щуп 38. Этот ви 27 аналогичен описанному в относигнал I посылается в пропорциональшении ветви 28. 50 ный регулятор 41, например типа PID Соединение между командным орга(дифференциально-интегральный пропорном 12 и валом 13 обеспечивается циональный регулятор). Регулятор 41 универсальным шарниром 33, допускаюоказывает действие на сервогидравлищим некоторую свободу движения оргаческии блок 42, содержащий быстрона 12 относительно вала П и наобо5S действующий затвор, в гидравлическую рот. Универсальный шарнир 33 может цепь гидросилового цилиндра. иметь различные формы, в частности Сервогидравлическии блок 42 форму шарового шарнира (в качестве устанавливает циркуляцию гидравлипримера показан карданный шарнир 33) 1106447 ческогв-'рабочего тела либо в одном, либо в другом направлении, следуя тому, является ли сигналі положительным или отрицательным. Другими словами, знак сигнала I определяет 5 направление перемещения штока поршня 22 силового гидроцилиндра и направление поворота желоба вокруг оси X. Это действие на силовой цилиндр осуществляется в на~ 10 правлении, обратном действию, которое вызывает смещение іх, на щуп и происходит до тех пор, пока щуп снова не займет свое нейтральное положение, т.е. пока сигнал I не станет равным 15 нулю. Сервогидравлический блок 42, кроме того, задуман таким образом, чтобы изменять расход гидравлического рабочего тела в цепи силового цилиндра ?о в зависимости от амплитуды! , т.е. скорость поворота вокруг оси желоба, сообщаемая поршнем, является функцией величины й хЦепь управления, аналогичная цепи 25 управления на фиг. 6, объединена со щупом 37, чтобы управлять силовым цилиндром 25 и поворотом желоба 3 вокруг оси У. Щупы 37 и 38 испытывают, следова- зо тельно, двойное действие командного органа 12 и желоба 3 при посредничестве вилки 5 и вала 13. Со стороны командного органа 12 щупы 37 и 38 получают инструктивные данные по, с средством действия движителя.Со стороны желоба 3 щупы 37 и 38 постоянно получают информацию, касающуюся реального положения этого желоба. Пока данные, касающиеся реального положе- 4 0 ния, не соответствуют инструктивным данным, датчики 39 и 40 поддерживают сигналы 1 для приведения в действие соответствующих силовых цилиндров с целью уменьшения сигналов L . Следо- 4 5 вательно, существует авторегулировка положения или ориентации желоба 3 вокруг положения, предписываемого двигателем 15. If Если происходит повреждение на входе или на выходе командного органа, например электрическое повреждение двигателя 15 или повреждение гидравлических цепей силовых гидрот хилиндров, система сервопривода боль*ше не в состоянии аннулировать компенсацией сигнал t так, что fcx имеет тенденцию возрастать неконтролируе 8 мым образом. Для предупреждения подобных ситуаций рядом с датчиками 39 и 40 расположены предохранительные датчики 43 и 44, которые также являются позиционными датчиками, аналогичными датчикам 39 и 40. Датчики 43 и 44 включают сигнал, когда Д х превышает в абсолютном значении предварительно определенный порог, который немедленно блокирует гидравлическую цепь и движитель. Во избежание, несмотря на наличие датчиков 43 и 44, любого риска разрушения вследствие задержки ответа, длительность которой составляет время, проходящее между действием на датчики 43 и 44 и результатом их работы, предусмотрено дополните п ы ю е предохранительное устройство, первый вариант исполнения которого показан на фиг. 3 и 5, а второй - на фиг. 6. Согласно первому варианту исполнения (фиг. 3 и 5) шарнир 33 предусмотрен внутри рамки 45, находящейся внутри соответствующей рамки 46, закрепленной на вращающемся валу 13. Рамки 45 и 46 удерживаются вместе только четырьмя парами эластичных фиксаторов 47, предусмотренных в четырех их углах. Каждый из этих фикса торов содержит, например, пару пластинок 48 и 49, наложенных по одну и по другую стороны рамок 45 и 46 таким образом, чтобы перекрыть их разделение. Пластинки 48 и 49 удерживаются в этом расположении согласно фиг. 3 под действием двух пружин 50 и 51, которые являются достаточно мощными, чтобы обеспечить поддержание конфигурации, показанной на фиг.З и 5. Однако, когда появляется чрезвычайная нагрузка на одну из двух рамок 45 и 46, а другая из них не может следовать движению, вызываемому этой нагрузкой, одна из пластинок 48 и 49 уступает действию соответствующей пружины, и рамки 45 и 46 могут полностью разойтись одна по отноіг^нию к другой без риска разрушения. Например, когда вследствие повреждения в гидравлической цепи, например утечки, соответствующий силовой цилиндр более ке в состоянии обеспечивать положение желоба я соответствии с инструктивными сигналами, последний поддействием своего собственного веса стремится опрокинуться Б верти 1106447 10 рамки 54 и рассоединения последней относительно внешней рамки 53, *> 'строе восстановление ее конструкции посредством соответствующего ручного, поворота различных рамок до тех пор, пока они будут удерживаться своими эластичными фиксаторами, остается всегда возможным. Возможно предусмотреть другие предохранительные системы, выполняющие те же функции. Например, вместо предохранительной системы между командным органом 12 и вилкой 5 возможно предусмотреть предохранительную систему между командным органом 12 и его приводным .механизмом. Такая предохранительная система может, например, быть образована фрикционной муфтой на уровне командных валов 16 или 17 или между ними и их соответствующим .двигателем. Фиг. 8-11 иллюстрируют второй вариант исполнения, когда командный орган и его приводной механизм остаются полностью независимыми от устройства подвески желоба 3. Элементы, соответствующие элементам предыдущего варианта исполнения, обозначены теми же цифрами. Согласно этому варианту исполнения угловое положение желоба 3 постоянно контролируется с помощью двух датчиков 61 и 62. Датчик 61 определяет действительное угловое положение желоба относительно оси N и передает сигналы, пропорциональные амплитуде поворота рычага 23 вокруг оси £, т.е. повороты желоба 3 вокруг оси X. Датчик 62 также определяет движения вокруг оси У и возбуждает и передает сигналы у пропорциональные амплитуде вращения вилки 5 и желоба 3 вокруг оси У. Как и согласно предыдущему варианНа фиг. 10 и 11 показан командный ту исполнения, фиксаторы уступают под орган 63, который может быть установдействием нормальной силы и допуслен на соответствующее место, наприкают раэдвижение различных рамок вомер в машинное отделение, и приводиткруг осей 55 и/или 56. в то время, ся в действие соответствующим приводкак согласно варианту исполнения ным механизмом 64. на фиг. 3 и 5 раздвижение вызывает Командный орган 63 установлен на полное освобождение внутренней рам- 50 соответствующей раме 65 с помощью ки 45 относительно внешней рамки 46, универсального шарнира, в противопосогласно варианту исполнения на ложность карданному шарниру 66, котофиг. 5 конструкция остается удержирый позволяет командному органу 63 поворачиваться овокруг А » у л и иосей ) X. ваемой вместе благодаря наличию . . ~ ^ к а - , „ о а 1 ^ л ^ ^ И л двух с и Л , 5S осей 55 и 56 вращения. Действительно, У(, перпендикулярных одна другой и даже в случае общего рассоединения, соответствующих соответственно осям X т.е. рассоединения внутренней рами У вращения желоба Ї и готовке 1 пеки 52 относительно промежуточной чи. «сальное положение и увлечь за собой командный орган 12, который сам удерживается двигателем. Таким образом, командный орган 12 и его приводной механизм не в состоянии выдерживать нагрузку, окапываемую желобом 3, и при отсутствии предохранительной системы происходит сильное разрушение. Напротив, с такой системой в случае такого повреждения происходит просто 10 рассоединение двух рамок 45 и Д6, которые легко могут быть затем возвращены на место. На фиг. 6 показан второй вариант 15 исполнения предохранительного устройства. Согласно этому варианту исполнения рамка 52, несущая универсальный шарнир 33 с командным органом 12, удерживается во внешней рам20 ке 53, жестко закрепленной на вращающемся валу 13 посредством эластичного карданного фиксатора. С этой целью предусмотрена* промежуточная рамка 54, помещенная между рамками 52 и 53. Внутренняя рамка 52 может пово- 2 5 рачиваться вокруг оси 55, соответствующей оси Z, внутри промежуточной рамки 54, тогда как последняя поворачивается внутри внешней рамки 53 вокруг оси 56, перпендикулярной 30 оси 55. Эта конструкция удерживается вместе благодаря серии эластичных фиксаторов, схожих с фиксаторами 47 с пластинками и пружинами (фиг. 3 и 5 ) . Два фиксатора 57 и 58 удерживают внутреннюю рамку 52 по отноше-* 35 нию к промежуточной рамке 54 и препятствуют вращению вокруг оси 55. Два других эластичных фиксатора 59 и 60 препятствуют вращению промежуточной рамки 54 вокруг оси 56 внут- 40 ри внешней рамки 53. 11 t106447 12 Движение командного органа 63, наректирующие сигналы в зависимости от пример коническое прецессионное, дает этого сравнения. указания для движения желоба в форме Если случайно уголс*- равен углу ^ , инструктивных сигналов, это движение сигналы! *f(rt) и I =f(p) равны и регу* представляет собой соответственно 5 лятором 69 не возбуждается никакой угловые движения командного органа 63 сигнал. Напротив, если ^ отличается * вокруг осей Х ( и 1 і в карданном шаро т * , корректурующий сигнал, возбужнире 66. Эти угловые движения органа даемый регулятором 69 прикладывается определяются двумя датчиками 67 и 68, к золотниковому сервогидроприводу 70, которые соответствуют датчикам 61 10 который определяет направление циркуи 62 и контролируют соответственно ляции гидравлического рабочего тела повороти вокруг осей X j и У(. силового гидроцилиндра 2t в зависиНа фиг. 12 показана мнемоническая мости от знака корректрирующих сигнасхема, иллюстрирующая связь между лов. Поршень силового гидроцилиндустройством на фиг. 9, которое вы15 ра 21 перемещается, следовательно, дает указания, и устройством на в одну или другую сторону в зависифиг. 8, которое должно их выполнять. мости от того, являются ли корректиКомандная цепь является объединенной рующие сигналы положительными или отс силовым гидроцилиндром 21 для порицательными. Эта команда длится до ворота вокруг оси X. Аналогичная 20 тех пор, пока угол ft не станет равным цепь предусмотрена для приведения углу в и корректирующие сигналы не б в действие силового цилиндра для станут нулевыми. осуществления поворота вокруг оси У. Как и согласно предыдущему варианПредположим, что командный орту исполнения, сервогидропривод 70 ган 63 будет повернут вокруг своей 25 определяет также расход гидравличесоси вращения X на угол о . Это являетб кого рабочего тела в зависимости от ся инструктивной величиной для желоамплитуды корректирующих сигналов. ба, т.е. последний должен занять наклонное положение о относительно б Когда командный орган 63 приводитвертикальной оси 0. Этот поворот кося в круговое коническое прецессион30 мандного органа 63 вокруг оси X отное движение, на уровне карданного мечается датчиком 67, который возбужшарнира 66 производятся постоянные дает электрический сигналі *f (вб), повороты вокруг двух осей Х< и У
ДивитисяДодаткова інформація
Назва патенту англійськоюLoading device of shaft furnace
Автори англійськоюLegille Edouard
Назва патенту російськоюЗагрузочное устройство шахтной печи
Автори російськоюЭдуард Лежилль
МПК / Мітки
МПК: C21B 7/20
Мітки: шахтної, завантажувальний, печі, пристрій
Код посилання
<a href="https://ua.patents.su/14-7062-zavantazhuvalnijj-pristrijj-shakhtno-pechi.html" target="_blank" rel="follow" title="База патентів України">Завантажувальний пристрій шахтної печи</a>
Завантажувальний пристрій шахтної печи
Номер патенту: 7061
Опубліковано: 31.03.1995
Автори: П'єр Мельє, Едуард Лежилль
МПК: C21B 7/20
Мітки: пристрій, печі, завантажувальний, шахтної
Формула / Реферат:
(57) 1. ЗАГРУЗОЧНОЕ УСТРОЙСТВО ШАХТНОЙ ПЕЧИ, содержащее приводной желоб с механизмами его качания, вертикальную воронку для подачи в печь шихтовых материалов, смонтированную на колошнике печи и сообщенную с наружным шихтовым бункером, при этом желоб с кронштейнами подвешен в герметичной камере печи между двумя ветвями приводной полой вилки, .установленной в подшипнике, а несущий рычаг вилки расположен под прямым углом к оси подвески желоба,...
Завантажувальний пристрій для шахтної печі
Номер патенту: 6018
Опубліковано: 29.12.1994
Автори: Еміль Лонарді, Герман Шильц, Едуард Лежилль
МПК: C21B 7/20
Мітки: завантажувальний, шахтної, пристрій, печі
Формула / Реферат:
1. Загрузочное устройство дляшахтной печи, содержащее несколько бункеров для хранения загружаемого материалц, установленных над печью, желоб распределения материала, кожух с заслонками, патрубком подачи материала с дозировочной и уплотняющей заслонками, установленный на головке печи, отличающееся тем, что, с целью снижения габаритов печи и повышения равномерности распределения материала по радиусу печи, оно снабжено плитой с...
Спосіб керування приводом руху лотка завантажувального пристрія шахтної печи
Номер патенту: 7055
Опубліковано: 31.03.1995
Автори: Еміль Лонарді, Гі Тіллен, Едуард Лежилль
МПК: C21B 7/20
Мітки: пристрія, льотка, руху, спосіб, шахтної, керування, печі, завантажувального, приводом
Формула / Реферат:
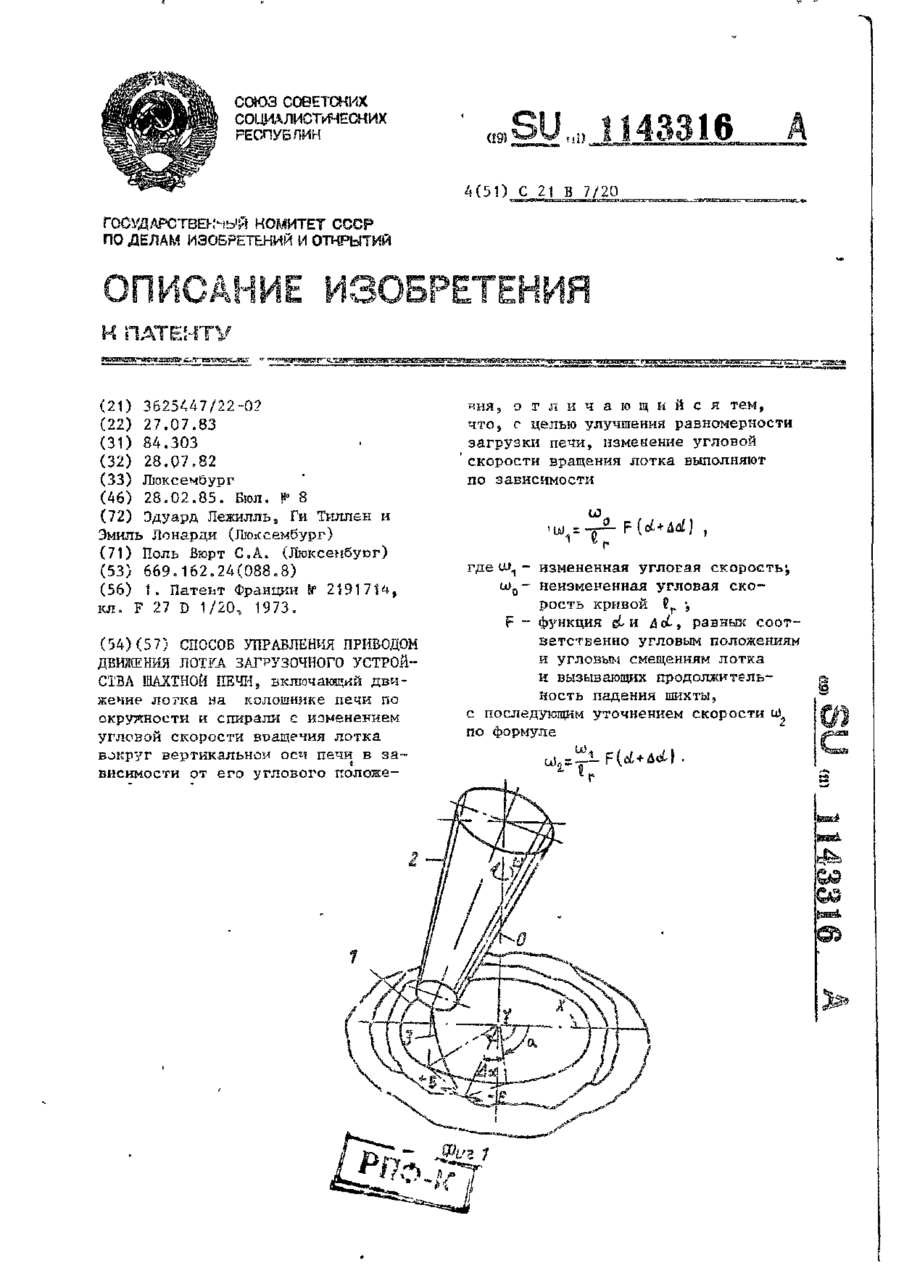
(57) Способ управления приводом движения лотка загрузочного устройства шахтной печи, включающий движение лотка на колошнике печи по окружности и спирали с изменением угловой скорости вращения лотка вокруг вертикальной оси печи в зависимости от его углового положения, отличающийся тем, что, с целью улучшения равномерности загрузки печи, изменение угловой скорости вращения лотка выполняют по зависимостигде w1 - измененная угловая...
Завантажувальний пристрій шахтної печі
Номер патенту: 6017
Опубліковано: 29.12.1994
Автори: Жермен Шільц, П'єр Мейє
Мітки: шахтної, завантажувальний, пристрій, печі
Формула / Реферат:
1. Загрузочное устройство шахтной печи, содержащее камеру загрузки с центральным отверстием в верхней части, шарнирно установленный двуплечий рычаг, заслонку, установленную на одном конце этого рычага, соединенного другим концом с механизмом перемещения заслонки, причем механизм перемещения выполнен в виде полого поворотного суппорта, закрепленного в уплотняющей втулке, при этом ось вращения механизма лежит в одной вертикальной плоскости...
Пристрій для завантаження шахтної вапняної печі
Номер патенту: 5349
Опубліковано: 28.12.1994
Автори: Науменко Василь Дмитрович, Панов Валерій Васильович, Гуревич Роман Якович, Педос Анатолій Григорович, Шевцов Леонід Дмитрович
МПК: F27B 1/10
Мітки: завантаження, шахтної, вапняної, пристрій, печі
Формула / Реферат:
Устройство для загрузки шахтной известковой печи, включающее скиповый подъемник с ковшом, приемный бункер с размещенным в нем двойным механизмом загрузки и поворотный распределительный лоток, отличающееся тем, что в двойном механизме загрузки верхний механизм выполнен в виде крышки приемного бункера, оснащенной рычагами для взаимодействия со скиповым подъемником и имеющей на оси поворота ролик, соединенный с храповым механизмом,...
Попередній патент: Завантажувальний пристрій шахтної печи
Наступний патент: Пристрій для контактної стикової зварки рельсів
Випадковий патент: Приставна драбина, яка може трансформуватися в самоопорну