Спосіб і пристрій для заповнення ємності
Формула / Реферат
1. Пристрій для обробки ємностей (2) стисливого типу, який містить:
одне або більше робочих місць (S), і
транспортуючий вузол (4),
причому вказаний пристрій виконаний для прийому вказаних ємностей (2), орієнтованих в першому напрямі (Р1), і
вказаний транспортуючий вузол (4) виконаний для переміщення вказаних ємностей (2) щонайменше в одне з вказаних робочих місць (S) за допомогою переміщення ємностей (2) у другому напрямі (Р2) по криволінійній траєкторії (6), причому вказаний другий напрям (Р2) є перпендикулярним вказаному першому напряму (Р1),
який відрізняється тим, що
він забезпечений утримуючим засобом, забезпеченим для вказаного щонайменше одного робочого місця (S) і розташованим в стаціонарному положенні, суміжному з робочим місцем (S), і
переміщуючим засобом (18), який забезпечений для вказаного щонайменше одного робочого місця (S) і встановлений на транспортуючому вузлі (4), і який може циклічно переміщуватися вздовж нескінченного шляху між положенням (А) захоплення і положенням (В) доставки, розташованим суміжно з робочим місцем (S),
причому переміщуючий засіб (18) виконаний для захоплення щонайменше однієї ємності (2) в положенні (А) захоплення і передачі вказаної щонайменше однієї ємності (2) в положенні (В) доставки утримуючому засобу.
2. Пристрій за п. 1, в якому кожна з ємностей (2), для яких призначений пристрій, має внутрішній об'єм, обмежений двома протилежними бічними стінками і донною стінкою, причому вказані бічні стінки з'єднані в їх верхній частині з утворенням верхнього боку (5), що продовжується по лінії, при цьому орієнтація ємностей (2) у вказаному першому напрямі (Р1) означає, що верхні боки (5) ємностей (2) розташовані по суті паралельно вказаному першому напряму.
3. Пристрій за п. 1 або 2, в якому вказаний транспортуючий вузол (4) виконаний для захоплення верхньої частини вказаних ємностей (2) під час їх переміщення.
4. Пристрій за будь-яким з пп. 1-3, в якому утримуючий засіб може працювати між закритим положенням для захоплення ємності (2) і відкритим положенням для звільнення ємності (2), причому утримуючий засіб виконаний з можливістю переходу в закрите положення і відкрите положення у відповідь на переміщуючий засіб (18), під час його руху вздовж вказаної нескінченної стрічки при проходженні положення (В) доставки і положення (А) захоплення, відповідно.
5. Пристрій за будь-яким попереднім пунктом, в якому переміщуючий засіб (18) може працювати між відкритим положенням для звільнення ємності (2) і закритим положенням для захоплення ємності (2), причому переміщуючий засіб (18), під час його руху вздовж нескінченного шляху, виконаний з можливістю переходу в закрите положення і відкрите положення, проходячи положення (А) захоплення і положення (В) доставки, відповідно.
6. Пристрій за будь-яким попереднім пунктом, який додатково містить вузол для пневматичного керування утримуючим засобом і переміщуючим засобом (18).
7. Пристрій за будь-яким попереднім пунктом, в якому переміщуючий засіб (18), проходячи положення (В) доставки, має компонент руху, який є перпендикулярним вказаному другому напряму (Р2).
8. Пристрій за будь-яким попереднім пунктом, в якому нескінченний шлях, вздовж якого рухається переміщуючий засіб (18), має форму кола, причому положення (А) захоплення знаходиться в положенні, відповідному дев'яти годинам, і положення (В) доставки знаходиться в положенні, відповідному трьом годинам.
9. Пристрій за будь-яким попереднім пунктом, в якому одне з вказаного щонайменше одного робочого місця (S) є робочим місцем (S2) заповнення, що має заповнюючий патрубок (25), який за допомогою відносного руху може вставлятися в канал для заповнення в ємності (2).
10. Пристрій за п. 9, в якому заповнюючий патрубок (25) робочого місця (S2) заповнення встановлений нерухомо.
11. Пристрій за будь-яким попереднім пунктом, в якому одне з вказаного щонайменше одного робочого місця (S) є робочим місцем (S1) відкриття, що має розкриваючі засоби, які виконані для відділення одна від одної бічних стінних частин ємностей (2) з метою відкриття каналу для заповнення.
12. Пристрій за будь-яким попереднім пунктом, в якому одне з вказаного щонайменше одного робочого місця (S) є робочим місцем (S3) запечатування, що має запечатувальний засіб для запечатування каналу для заповнення в ємності (2).
13. Пристрій за будь-яким попереднім пунктом, в якому одне з вказаного щонайменше одного робочого місця (S) є робочим місцем заповнення газом, яке містить засіб подачі газу в частину ємностей (2), що захоплюється рукою, причому засіб подачі газу виконаний для подачі вказаного газу через отвір, що утворений в одній з бічних стінок ємностей (2) і що з'єднується з частиною, що захоплюється рукою, через канал для газу.
14. Пристрій за будь-яким попереднім пунктом, в якому одне з вказаного щонайменше одного робочого місця (S) є робочим місцем запечатування, яке містить засіб запечатування каналу для газу з метою утримання газу, поданого в частину ємностей, що захоплюється рукою (2).
15. Пристрій за будь-яким попереднім пунктом, в якому транспортуючий вузол (4) виконаний з можливістю переміщення вказаних ємностей (2) у множину робочих місць (S) за допомогою переміщення їх у другому напрямі (Р2) по криволінійних траєкторіях (6), причому вказані робочі місця (S) розташовані одне за одним у вказаному другому напрямі (Р2).
16. Пристрій за будь-яким попереднім пунктом, в якому кожне робоче місце (S) виконане для одночасної обробки множини ємностей (2).
17. Пристрій за будь-яким попереднім пунктом, в якому транспортуючий вузол (4) встановлений на тримачі (8), що обертається, на радіальній відстані від центра (С) обертання тримача (8).
18. Спосіб обробки ємностей (2) стисливого типу в розливній машині (1), причому кожна ємність (2) має внутрішній об'єм, обмежений двома протилежними бічними стінками і донною стінкою, який включає:
орієнтування ємностей (2) в першому напрямі (Р1) таким чином, щоб верхні боки (5) ємностей (2) були по суті паралельні вказаному напряму (Р1), і
транспортування ємностей (2) до щонайменше одного робочого місця (S) шляхом їх переміщення у другому напрямі (Р2) по криволінійній траєкторії (6), причому вказаний другий напрям (Р2) є перпендикулярним вказаному першому напряму (Р1),
який відрізняється тим, що
переміщення вказаних ємностей здійснюють за допомогою переміщуючого засобу (18), який забезпечений для вказаного щонайменше одного робочого місця (S) і який циклічно переміщується вздовж нескінченного шляху між положенням (А) захоплення і положенням (В) доставки, розташованим суміжно з робочим місцем (S),
причому переміщуючий засіб (18) захоплює щонайменше одну ємність (2) в положенні (А) захоплення і доставляє вказану щонайменше одну ємність (2) в положення (В) доставки.
19. Спосіб за п. 18, в якому вказане щонайменше одне робоче місце (S1) містить робоче місце (S2) заповнення для заповнення ємностей (2).
Текст
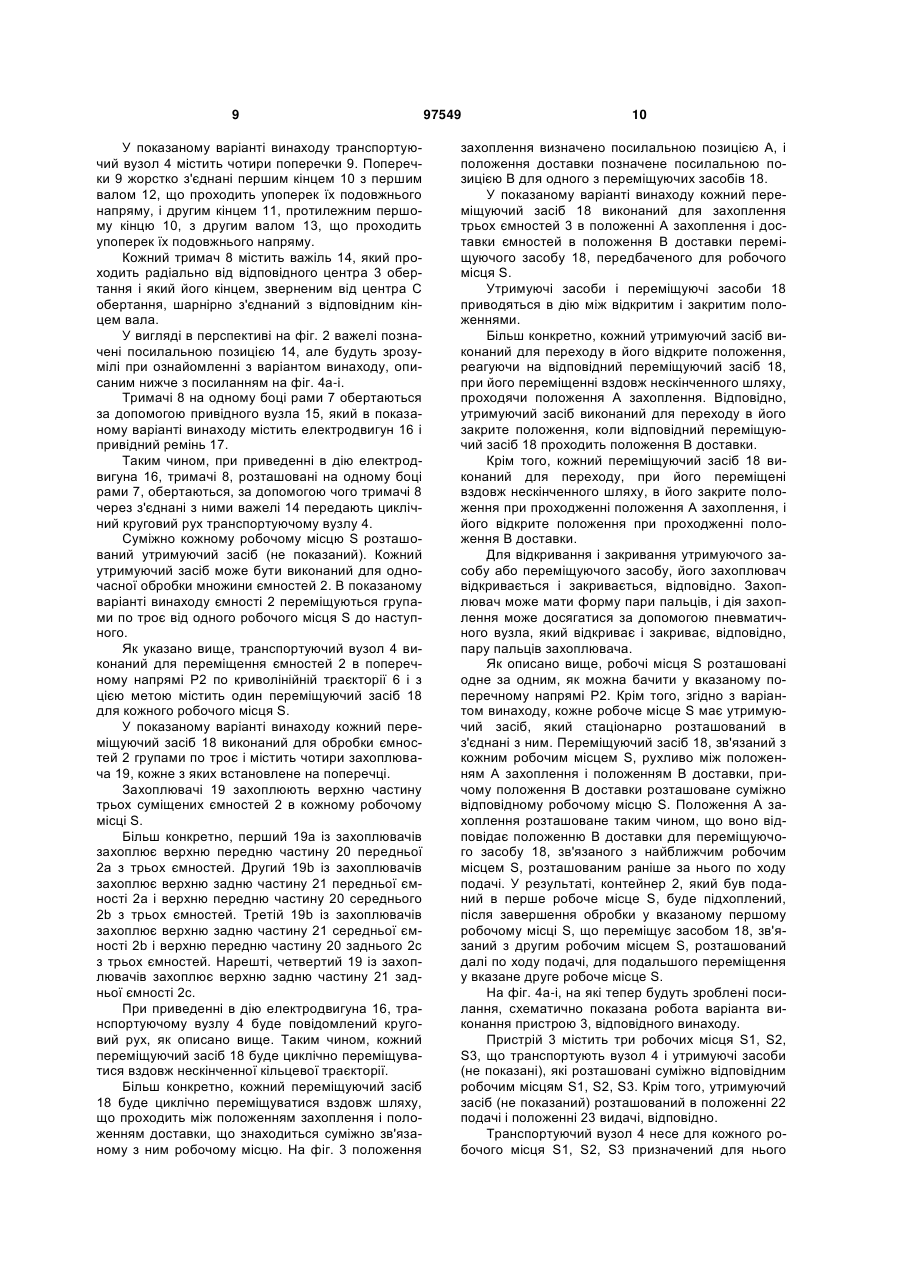
1. Пристрій для обробки ємностей (2) стисливого типу, який містить: одне або більше робочих місць (S), і транспортуючий вузол (4), причому вказаний пристрій виконаний для прийому вказаних ємностей (2), орієнтованих в першому напрямі (Р1), і вказаний транспортуючий вузол (4) виконаний для переміщення вказаних ємностей (2) щонайменше в одне з вказаних робочих місць (S) за допомогою переміщення ємностей (2) у другому напрямі (Р2) по криволінійній траєкторії (6), причому вказаний другий напрям (Р2) є перпендикулярним вказаному першому напряму (Р1), який відрізняється тим, що він забезпечений утримуючим засобом, забезпеченим для вказаного щонайменше одного робочого місця (S) і розташованим в стаціонарному положенні, суміжному з робочим місцем (S), і переміщуючим засобом (18), який забезпечений для вказаного щонайменше одного робочого місця (S) і встановлений на транспортуючому вузлі (4), і який може циклічно переміщуватися вздовж нескінченного шляху між положенням (А) захоплення і положенням (В) доставки, розташованим суміжно з робочим місцем (S), причому переміщуючий засіб (18) виконаний для захоплення щонайменше однієї ємності (2) в положенні (А) захоплення і передачі вказаної щонайменше однієї ємності (2) в положенні (В) доставки утримуючому засобу. 2. Пристрій за п. 1, в якому кожна з ємностей (2), для яких призначений пристрій, має внутрішній об'єм, обмежений двома протилежними бічними стінками і донною стінкою, причому вказані бічні 2 (19) 1 3 97549 4 що має заповнюючий патрубок (25), який за допомогою відносного руху може вставлятися в канал для заповнення в ємності (2). 10. Пристрій за п. 9, в якому заповнюючий патрубок (25) робочого місця (S2) заповнення встановлений нерухомо. 11. Пристрій за будь-яким попереднім пунктом, в якому одне з вказаного щонайменше одного робочого місця (S) є робочим місцем (S1) відкриття, що має розкриваючі засоби, які виконані для відділення одна від одної бічних стінних частин ємностей (2) з метою відкриття каналу для заповнення. 12. Пристрій за будь-яким попереднім пунктом, в якому одне з вказаного щонайменше одного робочого місця (S) є робочим місцем (S3) запечатування, що має запечатувальний засіб для запечатування каналу для заповнення в ємності (2). 13. Пристрій за будь-яким попереднім пунктом, в якому одне з вказаного щонайменше одного робочого місця (S) є робочим місцем заповнення газом, яке містить засіб подачі газу в частину ємностей (2), що захоплюється рукою, причому засіб подачі газу виконаний для подачі вказаного газу через отвір, що утворений в одній з бічних стінок ємностей (2) і що з'єднується з частиною, що захоплюється рукою, через канал для газу. 14. Пристрій за будь-яким попереднім пунктом, в якому одне з вказаного щонайменше одного робочого місця (S) є робочим місцем запечатування, яке містить засіб запечатування каналу для газу з метою утримання газу, поданого в частину ємностей, що захоплюється рукою (2). 15. Пристрій за будь-яким попереднім пунктом, в якому транспортуючий вузол (4) виконаний з можливістю переміщення вказаних ємностей (2) у множину робочих місць (S) за допомогою переміщення їх у другому напрямі (Р2) по криволінійних траєкторіях (6), причому вказані робочі місця (S) розташовані одне за одним у вказаному другому напрямі (Р2). 16. Пристрій за будь-яким попереднім пунктом, в якому кожне робоче місце (S) виконане для одночасної обробки множини ємностей (2). 17. Пристрій за будь-яким попереднім пунктом, в якому транспортуючий вузол (4) встановлений на тримачі (8), що обертається, на радіальній відстані від центра (С) обертання тримача (8). 18. Спосіб обробки ємностей (2) стисливого типу в розливній машині (1), причому кожна ємність (2) має внутрішній об'єм, обмежений двома протилежними бічними стінками і донною стінкою, який включає: орієнтування ємностей (2) в першому напрямі (Р1) таким чином, щоб верхні боки (5) ємностей (2) були по суті паралельні вказаному напряму (Р1), і транспортування ємностей (2) до щонайменше одного робочого місця (S) шляхом їх переміщення у другому напрямі (Р2) по криволінійній траєкторії (6), причому вказаний другий напрям (Р2) є перпендикулярним вказаному першому напряму (Р1), який відрізняється тим, що переміщення вказаних ємностей здійснюють за допомогою переміщуючого засобу (18), який забезпечений для вказаного щонайменше одного робочого місця (S) і який циклічно переміщується вздовж нескінченного шляху між положенням (А) захоплення і положенням (В) доставки, розташованим суміжно з робочим місцем (S), причому переміщуючий засіб (18) захоплює щонайменше одну ємність (2) в положенні (А) захоплення і доставляє вказану щонайменше одну ємність (2) в положення (В) доставки. 19. Спосіб за п. 18, в якому вказане щонайменше одне робоче місце (S1) містить робоче місце (S2) заповнення для заповнення ємностей (2). Даний винахід стосується способу обробки ємностей, зокрема, ємностей стисливого типу і пристрою для його здійснення. Рідкі продукти, і зокрема такі рідкі харчові продукти, як вода, молоко, сік або вино, все частіше упаковують в ємності стисливого типу. Під ємністю стисливого типу мається на увазі ємність, ідо має внутрішній об'єм, що обмежений гнучкими стінками і залежить від відносного положення стінок. Відоме виробництво стисливих полотен з з'єднаних між собою ємностей описаного вище типу, намотаних на бобіну, і розміщення такого рулону в розливній машині. Розливна машина такого типу відома, наприклад з публікації WO 99/41149. Документ описує, як розмотане полотно заготівель ємностей подають в розливну машину таким чином, що вони по черзі надходять на робоче місце відкриття каналу для заповнення, в робоче місце для заповнення кожної ємності і в робоче місце для запечатування заповнених ємностей. Розливна машина звичайно вимагає відносно значних вкладень і, таким чином, існує потреба в розливних машинах простої конструкції, а також в розливних машинах з високою продуктивністю заповнення, тобто здатних заповнювати порівняно велику кількість ємностей за одиницю часу. У зв'язку з вищевикладеним, задача даного винаходу полягає в створенні вдосконаленого пристрою для обробки ємностей стисливого типу. Для рішення цієї задачі створений пристрій за винаходом, що має ознаки, вказані в п. 1 формули винаходу, і спосіб, що має ознаки, вказані в п. 18. Варіанти виконання пристрою будуть зрозумілі з пп. 2-17, і варіант способу буде зрозумілий з п. 19. Більш конкретно винахід пропонує пристрій для обробки ємностей стисливого типу, що містить одне або більше робочих місць і транспортуючий вузол. Пристрій виконаний для прийому вказаних ємностей, орієнтованих в першому напрямі, і транспортуючий вузол виконаний для переміщення вказаних ємностей щонайменше в одне з вказаних робочих місць за допомогою переміщення ємнос 5 тей у другому напрямі по криволінійній траєкторії, причому вказаний другий напрям перпендикулярний вказаному першому напряму. Пристрій відрізняється утримуючим засобом, передбаченим щонайменше для одного робочого місця і розташованим стаціонарно і суміжно робочому місцю, і переміщуючим засобом, який передбачений для вказаного щонайменше одного робочого місця і встановлено на транспортуючому вузлі, причому вказаний вузол може циклічно переміщуватися вздовж нескінченного шляху між положенням захоплення і положенням доставки, розташованим суміжно робочому місцю. Переміщуючий засіб виконаний для захоплення щонайменше однієї ємності в положенні захоплення і передачі вказаної щонайменше однієї ємності в положенні доставки утримуючого засобу. Таким чином, одержаний вдосконалений пристрій для обробки ємностей стисливого типу. Цей пристрій може використовуватися, наприклад в розливній машині. Ємності орієнтують в першому напрямі і потім переміщують щонайменше в одне робоче місце у другому напрямі, перпендикулярному першому, по криволінійній траєкторії. Таким чином, кожна ємність може бути переміщена поперечно у вказане щонайменше одне робоче місце. Ємності стисливого типу, знаходяться в плоскому стані до заповнення і, таким чином, мають дуже невелику протяжність в поперечному напрямі. У результаті, для переміщення ємності з положення подачі в робоче місце або від одного робочого місця до іншого, необхідна відстань, на яку контейнер повинен бути переміщений, мінімізована. Завдяки переміщенню ємності по криволінійній траєкторії, можна забезпечувати те, що контейнер після прибуття, буде зістикований з відповідним робочим місцем. Таким чином контейнер доставляється в робоче місце, яке може мати порівняно просту конструкцію. Переміщуючий засіб, виконаний для циклічного переміщення вздовж нескінченної стрічки, надійно здійснює транспортування ємностей у другому напрямі по криволінійній траєкторії. Кожна з ємностей, для яких призначений пристрій, має внутрішній об'єм, обмежений двома протилежними бічними стінками і донною стінкою, причому вказані бічні стінки з'єднані у верхній їх частині з утворенням верхнього боку, що продовжується по лінії, причому орієнтація ємностей у вказаному першому напрямі приводить до того, що верхні боки ємностей розташовуються по суті паралельно вказаному першому напряму. Згідно з одним варіантом даного винаходу, транспортуючий вузол може бути виконаний з можливістю захоплення верхньої частини вказаних ємностей під час їх переміщення. Це означає, що ємності захоплюються таким чином, що вони будуть підвішені на транспортуючому вузлі. Утримуючі засоби можуть приводитися в дію між закритим положенням для захоплення ємності і відкритим положенням для звільнення ємності, причому утримуючі засоби виконані для переходу в закрите положення і відкрите положення, відповідно, реагуючи на переміщуючий засіб, при його русі вздовж вказаного нескінченного шляху і про 97549 6 ходженні положення доставки і положення захоплення, відповідно. Переміщуючий засіб може приводитися в дію між відкритим положенням для звільнення ємності і закритим положенням для захоплення ємності, причому вказаний переміщуючий засіб, під час його руху вздовж нескінченного шляху, виконаний для переходу в закрите положення і відкрите положення при проходженні положення захоплення і положення доставки, відповідно. Таким чином, досягається координація першого і другого захоплюючих засобів для захоплення і передачі ємностей. Пристрій може містити вузол для пневматичного керування утримуючим засобом і переміщуючим засобом. Переміщуючий засіб може мати, при проходженні положення доставки, компонент руху, який є перпендикулярним вказаному другому напряму. Це дозволяє ємностям стикуватися з відповідним робочим місцем простим чином. Нескінченний шлях, вздовж якого може переміщуватися переміщуючий засіб (18), може мати форму кола, при цьому положення захоплення знаходиться в положенні, відповідному дев'яти годинам на циферблаті, і положення доставки знаходиться в положенні, відповідному трьом годинам на циферблаті. Згідно з одним варіантом винаходу, одне з вказаних робочих місць може бути робочим місцем заповнення, що має заповнюючий патрубок, який за допомогою відносного руху може вставлятися в канал для заповнення в ємності. Заповнюючий патрубок робочого місця заповнення може бути стаціонарним. Згідно з іншим варіантом винаходу, одне з вказаних робочих місць може бути робочим місцем відкриття, забезпеченим засобами відкриття, які виконані для відділення один від одного бічних стіночних частин ємностей з метою відкриття каналу для заповнення. Згідно з іншим варіантом винаходу, одне з вказаних робочих місць може бути робочим місцем запечатування, забезпеченим засобом запечатування, виконаним для запечатування каналу для заповнення в ємності. Згідно з іншим варіантом винаходу, одне з вказаного щонайменше одного робочого місця може бути робочим місцем заповнення газом, який містить засіб подачі газу в частину ємностей, утворюючи ручку (тобто ділянка, що захоплюється рукою) ємностей, причому засіб подачі газу виконаний для подачі вказаного газу через отвір, утворений в одній з бічних стінок ємностей і що з'єднується з рукою, що захоплюється частиною через канал для газу. Згідно з іншим варіантом винаходу, одне з вказаного щонайменше одного робочого місця може бути робочим місцем запечатування, яке містить запечатувальний засіб для запечатування каналу для газу для закупорення газу, поданого в частину ємностей, що захоплюється рукою. Згідно з іншим варіантом даного винаходу, транспортуючий вузол може бути виконаний з можливістю переміщення вказаних ємностей до множини робочих місць за допомогою їх перемі 7 щення у другому напрямі по криволінійній траєкторії, причому вказані робочі місця розташовані одне за одним у вказаному другому напрямі. Кожне робоче місце може бути виконане з можливістю одночасної обробки множини ємностей. Транспортуючий вузол виконаний для обробки відповідної кількості ємностей. Згідно з іншим варіантом даного винаходу, транспортуючий вузол може утримуватися обертовим тримачем на відстані від осі обертання тримача. Даний винахід також пропонує спосіб обробки ємностей стисливого типу в розливній машині, причому кожна з вказаних ємностей має внутрішній об'єм, обмежений двома протилежними бічними стінками і донною стінкою, що включає стадії орієнтування ємностей в першому напрямі таким чином, щоб верхній бік кожної ємності був розташований по суті паралельно вказаному напряму, і транспортування ємностей щонайменше в одне робоче місце за допомогою переміщення їх у другому напрямі по криволінійній траєкторії, причому вказаний другий напрям є перпендикулярним вказаному першому напряму. Спосіб характеризується тим, що транспортування вказаних ємностей здійснюють за допомогою транспортуючого вузла, передбаченого для вказаного щонайменше одного робочого місця, який здійснює циклічні переміщення вздовж нескінченного шляху між положенням захоплення і положенням доставки, розташованим суміжно робочому місцю, при цьому транспортуючий вузол захоплює щонайменше одну ємність в положенні захоплення і подає вказану щонайменше одну ємність в положення доставки. Таким чином, даний спосіб забезпечує ефективну обробку ємностей стисливого типу. Завдяки переміщенню ємностей у другому напрямі, який є поперечним напрямом, відстань, на яку ємність повинна бути переміщена для її передачі від одного робочого місця до іншого, мінімізована. Шляхом переміщення ємності по криволінійній траєкторії можна забезпечити те, що кожна ємність після прибуття стикується з відповідним робочим місцем, яке може бути робочим місцем заповнення. Відповідно, робоче місце не обов'язково виконувати переміщуваним до контейнера. Варіанти виконання даного винаходу далі описані на прикладі з посиланням на супроводжуючі креслення, на яких: Фіг. 1 - вигляд в перспективі розливної машини, що містить пристрій для обробки ємностей за винаходом; Фіг. 2 - вигляд в перспективі пристрою за фіг. 1; Фіг. 3 - вигляд збоку пристрою за фіг. 1; Фіг. 4а-і - схематичний вигляд збоку пристрою за винаходом, коли він займає різні робочі положення; Фіг. 5 - вигляд збоку переміщуючого засобу транспортуючого вузла в різних положеннях, відповідних робочим положенням, показаним на фіг. 4а-і. На фіг. 1 показана розливна машина 1 для заповнення ємностей 2 стисливого типу. 97549 8 Ємності 2 можуть бути виконані з ламінованого плівкового матеріалу, який може містити основний шар з мінерального наповнювача, такого як крейда, і поліолефінового зв'язуючого. Кожна ємність 2 може мати внутрішній об'єм, який обмежений двома протилежними бічними стінками і донною стінкою, і об'єм якої залежить від відносного положення гнучких стінок. Ємності 2 можуть бути з'єднані між собою і намотані на бобіну. У розливній машині 1 ємності 2 розмотуються і відділяються одна від одної. Ємності 2 можуть знаходитися в плоскому і закритому стані. Це забезпечує те, що ємності 2, які стерилізовані в зв'язку з виготовленням, можуть постачатися в цьому стерилізованому стані, наприклад на молочний завод. Розливна машина І за фіг. 1 містить пристрій 3 за винаходом для обробки ємностей 2 стисливого типу. Зрозуміло, що пристрій 3 за винаходом може використовуватися для обробки різних ємностей 2 стисливого типу і в інших застосуваннях. У показаному варіанті винаходу, пристрій 3 містить, як основні компоненти, множину робочих місць S і транспортуючий вузол 4. Буде зрозуміло, що пристрій 3 може також містити тільки одне робоче місце S. Показаний варіант пристрою 3, відповідного винаходу, виконаний для прийому ємностей 2, коли вони знаходяться у відділеному один від одного, плоскому і відкритому стані. Під відкритим станом мається на увазі, що кінцеве ущільнення кожної спочатку закупореної ємності 2 видалене за допомогою різання або зсуву таким чином, що внутрішній об'єм ємності 2 з'єднаний з навколишнім середовищем через канал для заповнення. Пристрій також виконаний для прийому ємностей 2, орієнтованих в першому напрямі P1. У показаному варіанті винаходу ця орієнтація еквівалентна верхнім бокам ємностей 2, причому ці боки продовжуються по лінії, по суті паралельній вказаному першому напряму P1. З ємностями в плоскому стані, описаному вище, вказаний перший напрям P1 також співпадає з площиною протяжності бічних стінок ємностей 2. На фіг. 2 і на фіг. 3 пристрій 3 за фіг. 1 показаний окремо, і деякі частини видалені для ясності. На фіг. 2 не показані робочі місця, і на фіг. 3 робочі місця S позначені тільки схематично. Орієнтація ємностей 2 у вказаному першому напрямі P1 видна на фіг. 2, і ясно видні верхні боки 5 ємностей 2. Транспортуючий вузол 4 пристрою 3 виконаний для переміщення ємностей 2 до робочих місць S за допомогою переміщення ємностей 2 у другому напрямі Р2 по криволінійній траєкторії 6, як визначено штриховими лініями на фіг. 3. Другий напрям Р2, який згадується нижче як поперечний напрям, перпендикулярний вказаному першому напряму P1. Рама 7 несе множину тримачів 8. Тримачі 8 з можливістю обертання утримуються підшипниками на рамі 7 і утримують транспортуючий вузол 4. Більш конкретно, кожний тримач 8 виконаний для утримання транспортуючого вузла 4 на радіальній відстані від центра обертання тримача 8. 9 У показаному варіанті винаходу транспортуючий вузол 4 містить чотири поперечки 9. Поперечки 9 жорстко з'єднані першим кінцем 10 з першим валом 12, що проходить упоперек їх подовжнього напряму, і другим кінцем 11, протилежним першому кінцю 10, з другим валом 13, що проходить упоперек їх подовжнього напряму. Кожний тримач 8 містить важіль 14, який проходить радіально від відповідного центра 3 обертання і який його кінцем, зверненим від центра C обертання, шарнірно з'єднаний з відповідним кінцем вала. У вигляді в перспективі на фіг. 2 важелі позначені посилальною позицією 14, але будуть зрозумілі при ознайомленні з варіантом винаходу, описаним нижче з посиланням на фіг. 4а-і. Тримачі 8 на одному боці рами 7 обертаються за допомогою привідного вузла 15, який в показаному варіанті винаходу містить електродвигун 16 і привідний ремінь 17. Таким чином, при приведенні в дію електродвигуна 16, тримачі 8, розташовані на одному боці рами 7, обертаються, за допомогою чого тримачі 8 через з'єднані з ними важелі 14 передають циклічний круговий рух транспортуючому вузлу 4. Суміжно кожному робочому місцю S розташований утримуючий засіб (не показаний). Кожний утримуючий засіб може бути виконаний для одночасної обробки множини ємностей 2. В показаному варіанті винаходу ємності 2 переміщуються групами по троє від одного робочого місця S до наступного. Як указано вище, транспортуючий вузол 4 виконаний для переміщення ємностей 2 в поперечному напрямі Р2 по криволінійній траєкторії 6 і з цією метою містить один переміщуючий засіб 18 для кожного робочого місця S. У показаному варіанті винаходу кожний переміщуючий засіб 18 виконаний для обробки ємностей 2 групами по троє і містить чотири захоплювача 19, кожне з яких встановлене на поперечці. Захоплювачі 19 захоплюють верхню частину трьох суміщених ємностей 2 в кожному робочому місці S. Більш конкретно, перший 19а із захоплювачів захоплює верхню передню частину 20 передньої 2а з трьох ємностей. Другий 19b із захоплювачів захоплює верхню задню частину 21 передньої ємності 2а і верхню передню частину 20 середнього 2b з трьох ємностей. Третій 19b із захоплювачів захоплює верхню задню частину 21 середньої ємності 2b і верхню передню частину 20 заднього 2с з трьох ємностей. Нарешті, четвертий 19 із захоплювачів захоплює верхню задню частину 21 задньої ємності 2с. При приведенні в дію електродвигуна 16, транспортуючому вузлу 4 буде повідомлений круговий рух, як описано вище. Таким чином, кожний переміщуючий засіб 18 буде циклічно переміщуватися вздовж нескінченної кільцевої траєкторії. Більш конкретно, кожний переміщуючий засіб 18 буде циклічно переміщуватися вздовж шляху, що проходить між положенням захоплення і положенням доставки, що знаходиться суміжно зв'язаному з ним робочому місцю. На фіг. 3 положення 97549 10 захоплення визначено посилальною позицією А, і положення доставки позначене посилальною позицією В для одного з переміщуючих засобів 18. У показаному варіанті винаходу кожний переміщуючий засіб 18 виконаний для захоплення трьох ємностей 3 в положенні А захоплення і доставки ємностей в положення В доставки переміщуючого засобу 18, передбаченого для робочого місця S. Утримуючі засоби і переміщуючі засоби 18 приводяться в дію між відкритим і закритим положеннями. Більш конкретно, кожний утримуючий засіб виконаний для переходу в його відкрите положення, реагуючи на відповідний переміщуючий засіб 18, при його переміщенні вздовж нескінченного шляху, проходячи положення А захоплення. Відповідно, утримуючий засіб виконаний для переходу в його закрите положення, коли відповідний переміщуючий засіб 18 проходить положення В доставки. Крім того, кожний переміщуючий засіб 18 виконаний для переходу, при його переміщені вздовж нескінченного шляху, в його закрите положення при проходженні положення А захоплення, і його відкрите положення при проходженні положення В доставки. Для відкривання і закривання утримуючого засобу або переміщуючого засобу, його захоплювач відкривається і закривається, відповідно. Захоплювач може мати форму пари пальців, і дія захоплення може досягатися за допомогою пневматичного вузла, який відкриває і закриває, відповідно, пару пальців захоплювача. Як описано вище, робочі місця S розташовані одне за одним, як можна бачити у вказаному поперечному напрямі Р2. Крім того, згідно з варіантом винаходу, кожне робоче місце S має утримуючий засіб, який стаціонарно розташований в з'єднані з ним. Переміщуючий засіб 18, зв'язаний з кожним робочим місцем S, рухливо між положенням А захоплення і положенням В доставки, причому положення В доставки розташоване суміжно відповідному робочому місцю S. Положення А захоплення розташоване таким чином, що воно відповідає положенню В доставки для переміщуючого засобу 18, зв'язаного з найближчим робочим місцем S, розташованим раніше за нього по ходу подачі. У результаті, контейнер 2, який був поданий в перше робоче місце S, буде підхоплений, після завершення обробки у вказаному першому робочому місці S, що переміщує засобом 18, зв'язаний з другим робочим місцем S, розташований далі по ходу подачі, для подальшого переміщення у вказане друге робоче місце S. На фіг. 4а-і, на які тепер будуть зроблені посилання, схематично показана робота варіанта виконання пристрою 3, відповідного винаходу. Пристрій 3 містить три робочих місця S1, S2, S3, що транспортують вузол 4 і утримуючі засоби (не показані), які розташовані суміжно відповідним робочим місцям S1, S2, S3. Крім того, утримуючий засіб (не показаний) розташований в положенні 22 подачі і положенні 23 видачі, відповідно. Транспортуючий вузол 4 несе для кожного робочого місця S1, S2, S3 призначений для нього 11 переміщуючий засіб 18а, 18b, 18с. Також застосований переміщуючий засіб 18d, зв'язаний з положенням 23 видачі. Крім того, транспортуючий вузол 4 несе обертові тримачі 8. Кожний тримач 8 містить важіль 14, який на кінці, зверненому від центра C обертання тримача 8, з можливістю обертання встановлений на підшипниках транспортуючого вузла 4. Це допускає з'єднання кругового руху транспортуючого вузла 4, і, більш конкретно, кожний переміщуючий засіб 18а-с може циклічно переміщуватися вздовж кільцевого нескінченного шляху між положенням А захоплення і положенням В доставки. Положення А захоплення кожного з переміщуючих засобів ясно видно на фіг. 4а, і положення В доставки ясно видно на фіг. 4c. У показаному варіанті винаходу пристрій містить три робочих місця: робоче місце S1 відкриття, робоче місце S2 заповнення і робоче місце S3 запечатування. Буде зрозуміло, що пристрій 3 може містити інші робочі місця, а також більше або менше робочих місць. Робоче місце S1 відкриття головним чином містить пару присосок 24, які виконані для захоплення протилежних бічних стінних частин ємності 2. Ці бічні стінні частини утворюють канал для заповнення. Завдяки приведенню в дію і переміщенню одна від одної присосок 24, вказані бічні стінні частини можуть бути відділені одна від одної для відкриття каналу для заповнення ємності 2. Як описано вище, ємність 2 вже відкрита на попередній стадії за допомогою видалення кінцевого ущільнення ємності. Таким чином, для відкриття каналу для заповнення вказані бічні стінні частини вже відкритої ємності відділяють одна від одної, за допомогою чого канал для заповнення формує трубчасте з'єднання між внутрішнім об'ємом ємності 2 і навколишнім середовищем. Робоче місце S2 заповнення містить заповнюючий патрубок 25, який, при введенні у відкритий канал для заповнення ємності 2, виконаний для напряму рідкого продукту у внутрішній об'єм ємності 2. Робоче місце S3 запечатування містить пару запечатувальних захоплювачів 26, які виконані для захоплення бічних стінних частин ємності 2 для запечатування вказаного каналу для заповнення. Запечатування може здійснюватися, наприклад за допомогою термічного зварювання або ультразвукового зварювання. У показаному варіанті винаходу кожне робоче місце S1, S2, S3 виконане для обробки однієї ємності 2. Однак буде зрозуміло, що робочі місця S1, S2, S3 можуть бути виконані з можливістю паралельної обробки більше за одну ємність 2. В цьому випадку, транспортуючий вузол 4 може бути виконаний з можливістю паралельного переміщення відповідної кількості ємностей 2 від одного робочого місця до наступного. На фіг. 4а показаний транспортуючий вузол 4 в такому положенні, що його переміщуючі засоби 18a-d знаходяться в їх положеннях А захоплення. Крім того, переміщуючі засоби 18a-d приведені в дію для перекладу в їх закритий стан, в якому кожний з них захоплює верхню частину ємності 2. Перша 2а з ємностей знаходиться в положенні 97549 12 22 подачі пристрою і орієнтована в першому напрямі P1, що означає, що верхній бік ємності 2а розташований паралельно вказаному першому напряму P1. Друга 2b з ємностей розташована в робочому місці S1 відкриття, при цьому присоски 24 робочого місця S1 відкриття приведені в дію для відділення одна від одної бічних стінних частин ємності 2b. Третя 2с з ємностей розташована в робочому місці S2 заповнення, в якому рідкий продукт подається в контейнер 2с через заповнюючий патрубок 25 робочого місця S2 заповнення. Четверта 2d з ємностей розташована в робочому місці S3 запечатування, де запечатують захоплювач 26 робочого місця S3 запечатування приводяться в дію для запечатування каналу для заповнення заповненої ємності 2d. На фіг. 4b-е показано, як тримачі 8 обертаються в напрямі обертання, позначеному стрілкою P1. Вони повідомляють круговий рух транспортуючому вузлу 4 і, таким чином, вказаним переміщуючим засобом 18a-d, що приводить до переміщення переміщуючих засобів 18a-d від їх відповідного положення А захоплення до їх положення В доставки. Таким чином, кожна ємність 2a-d транспортується від попереднього робочого місця до наступного робочого місця, переміщаючись у другому напрямі Р2 по криволінійній траєкторії 6, причому вказаний другий напрям Р2 є поперечним напрямом для ємностей 2a-d і, таким чином, перпендикулярним вказаному першому напряму P1. У положеннях В видачі ємності 2a-d передаються утримуючим засобам відповідних робочих місць S1, S2, S3. Відповідно, як ясно показано на фіг. 3е, перша ємність 2а подана в робоче місце S1 відкриття, друга ємність 2b в робоче місце S2 заповнення, третя ємність 2с в робоче місце S3 запечатування і четверта ємність 2d в положення 23 видачі. У зв'язку з передачею ємностей 2a-d, стаціонарні утримуючі засоби переміщуються в їх закриті положення, і переміщуючі засоби 18a-d переміщуються транспортуючим вузлом 4 в їх відкриті положення. На фіг. 4f-i показано, як тримачі 8 продовжують їх обертальний рух у вказаному напрямі P1 обертання. Цей поворот буде спричиняти продовження кругового руху транспортуючого вузла 4, за допомогою чого переміщуючі засоби 18a-d будуть переміщуватися від їх відповідного положения В доставки в положення А захоплення вздовж кругової траєкторії. Крім того, на фіг. 4f показано, як робоче місце S1 відкриття приведене в дію для захоплення присосками 24 бічних стінних частин першої ємності 2а. Крім того, робоче місце S2 заповнення приведене в дію для напряму рідкого продукту у другий контейнер 2b через заповнюючий патрубок 25. Нарешті, запечатувані захоплювачі 26 робочого місця S3 запечатування захоплюють третій контейнер 2с для запечатування каналу для заповнення. На фіг. 4h показано, що відкриття першої ємності 2а, заповнення другої ємності 2b і запечатування третьої ємності 2с завершене. 13 На фіг. 4і переміщуючі засоби 18a-d переміщені в їх відповідне положення А захоплення. У положенні 22 подачі нова ємність 2е позначена штриховими лініями. За допомогою переміщення переміщуючих засобів 18a-d в їх закриті положення, в яких кожне з них захоплює відповідний контейнер 2е, 2а-с, і одночасно, відкривання утримуючих засобів (не показані), цикл може бути повторюваний таким чином, щоб передавати контейнер від одного робочого місця в наступне. На фіг. 5, на яку тепер будуть зроблені посилання, окремо показаний переміщуючий засіб 18, коли йому з'єднується циклічний круговий рух між положенням А захоплення і положенням В доставки. Як показано на фігурі, переміщуючий засіб 18, коли він переміщується в його закритому стані з положення захоплення в положення В доставки, діє для переміщення ємності 2 у вказаному поперечному напрямі P1 по криволінійній траєкторії 6. Переміщуючий засіб 18 потім повертається, будучи переміщуваним в його відкритому стані, з положення В доставки в положення А захоплення. Таким чином, транспортуючий вузол 4 пристрою 3, відповідного винаходу, виконано для переміщення ємності 2 в робоче місце S за допомогою переміщення його в поперечному напрямі Р2 по криволінійній траєкторії 6. Протяжність в поперечному напрямі ємностей 2 значно менша, ніж їх подовжня протяжність, тобто, у вказаному першому напрямі P1. Це справедливо, зокрема, для стану до того, як ємності 2 були заповнені вмістом, тобто, коли ємності 2 знаходяться в плоскому стані, по суті без протяжності у вказаному поперечному напрямі Р2. Оскільки ємності 2, будучи такими, що транспортуються, між робочими місцями S, переміщуються поперечно, тобто в напрямі, в якому ємності 2 мають найменшу протяжність, саме коротка відстань, на яку кожна ємність 2 повинна бути переміщена для передачі від одного робочого місця S до наступного, зменшена. У результаті, час, необхідний для переміщення однієї ємності 2 від одного робочого місця S до іншого, мінімізований, що, звичайно, впливає сприятливим чином на швидкість, з якою пристрій 3 здатний обробляти ємності 2. Оскільки ємності 2, коли вони транспортуються від одного робочого місця S до іншого, переміщуються по криволінійній траєкторії 6, можна забезпечувати те, що ємності 2, досягаючи положення В доставки, тобто досягаючи робочого місця S, мають компонент руху, який с поперечним відносно вказаного першого напряму P1 і вказано 97549 14 го другого напряму Р2, тобто, спрямований вертикально вгору в показаних варіантах винаходу. Більш конкретно, це досягається тим, що кожний переміщуючий засіб циклічно переміщується вздовж кругової траєкторії в напрямі обертання, позначеному стрілкою Р3, між положенням А захоплення, що знаходиться в положенні, відповідному дев'яти годинам на циферблаті, і положенням В доставки, що знаходиться в положенні, відповідному трьом годинам на циферблаті. Оскільки контейнер 2, досягаючи положення В доставки, має компонент руху, спрямований вертикально вгору, можна стикувати його з відповідним робочим місцем S. Відповідно, кожне робоче місце S може бути нерухомим у вертикальному напрямі. Ні робоче місце S1 відкриття, ні робоче місце S2 заповнення, ні робоче місце S3 запечатування не вимагає рухливості у вертикальному напрямі для введення в контакт з відповідним контейнером 2, оскільки самі ємності 2 переміщуються до робочих місць S1, S2, S3. Це означає, що робочі місця можуть мати порівняно просту конструкцію. Буде зрозуміло, що даний винахід не обмежено описаним вище. Пристрій, відповідний винаходу, може, наприклад містити більше, менше робочих місць або інші робочі місця. Такі інші робочі місця можуть бути робочим місцем заповнення газом, що містить засіб для подачі газу в частину ємності, що захоплюється рукою. Частина, яка захоплюється рукою може бути утворена в з'єднувальній частині ємності на боці, протилежному випускному отвору ємності. Засіб подачі газу може бути виконаний для подачі вказаного газу через отвір, утворений в одній з бічних стінок ємностей і що з'єднується з рукою, що захоплюється частиною через канал для газу, який також утворений в з'єднувальній частині ємності. Канал для газу може мати площу поперечного перерізу, яка значно менша, ніж площа поперечного перерізу частини, що захоплюється рукою. Додатковим робочим місцем може бути робоче місце запечатування, що містить засіб для запечатування вищевказаного каналу для газу для закупорення газу, поданого в частину, що захоплюється рукою. Закупорюючий засіб може бути виконаний для створення ущільнення упоперек каналу для газу за допомогою термічного зварювання або ультразвукового зварювання. Можливі декілька модифікацій і змін, і, таким чином, об'єм даного винаходу обмежений виключно прикладеною формулою винаходу. 15 97549 16 17 97549 18 19 97549 20 21 97549 22 23 97549 24 25 97549 26 27 97549 28 Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for filling container
Автори англійськоюGustafsson, Per
Назва патенту російськоюСпособ и устройство для заполнения емкости
Автори російськоюГустафссон Пер
МПК / Мітки
МПК: B65B 43/00
Мітки: заповнення, ємності, спосіб, пристрій
Код посилання
<a href="https://ua.patents.su/14-97549-sposib-i-pristrijj-dlya-zapovnennya-ehmnosti.html" target="_blank" rel="follow" title="База патентів України">Спосіб і пристрій для заповнення ємності</a>
Спосіб і пристрій для заповнення газом і герметизації каналу, призначеного для заповнення газом і розташованого в контейнері стисливого типу, і заготовка контейнера, яка містить такий канал
Номер патенту: 83687
Опубліковано: 11.08.2008
Автор: Форсс Стефан
МПК: B65D 30/16, B65D 33/06, B65B 61/00, B31B 1/74
Мітки: герметизації, заповнення, канал, розташованого, стисливого, контейнера, заготовка, спосіб, призначеного, каналу, яка, пристрій, газом, містить, контейнері, типу
Формула / Реферат:
1.Спосіб заповнення газом і герметизації каналу (7), призначеного для заповнення газом і розташованого в контейнері (1) стисливого типу, при цьому вказаний канал (7) утворений двома протилежними бічними стінками (2), які сполучені вздовж з'єднувальної ділянки (4), і включає в себе впускний елемент (15), розташований в одній із бічних стінок (2), який відрізняється тим, що передбачає затиск частини контейнера (1), яка містить зазначений...
Пристрій для стаціонарного акустичного контролю заповнення і звільнення підземних сховищ у пластах кам’яної солі, призначених для їх заповнення розсолом і рідким вуглеводнем
Номер патенту: 39914
Опубліковано: 10.03.2009
Автори: Нечаєв Юрій Андрійович, Шелковський Борис Іванович, Дубровський Леонард Костянтинович, Чабанович Любомир Богданович
МПК: G01V 1/40
Мітки: солі, кам'яної, акустичного, підземних, призначених, контролю, розсолом, звільнення, вуглеводнем, рідким, стаціонарного, заповнення, пристрій, сховищ, пластах
Формула / Реферат:
Пристрій для стаціонарного акустичного контролю заповнення і звільнення підземних сховищ у пластах кам'яної солі, призначених для їх заповнення розсолом і рідким вуглеводнем, що містить наземну реєструючу апаратуру, з'єднану з двома датчиками контролю положення границі розділу двох рідин, призначеними для їх розташування на різних рівнях у порожнині підземного сховища, який відрізняється тим, що кожний датчик контролю положення границі...
Пристрій для фасування продукту в ємності
Номер патенту: 22608
Опубліковано: 25.04.2007
Автори: Самойлик Олександра Євгенівна, Костін Володимир Борисович
МПК: B65B 3/00
Мітки: ємності, фасування, продукту, пристрій
Формула / Реферат:
Пристрій для фасування продукту в ємності, що складається із станини з приводом, карусельного стола, механізму подачі ємностей з магазином для ємностей, механізму блокування і нанесення дати, дозатора, механізму запечатування з пристроями для вирубування вкладиша, механізму перенесення вкладиша, механізму подачі і надівання кришок на ємність, клейової лапки, механізму подачі етикетки на кришку, знімача, транспортера, який відрізняється тим,...
Спосіб та пристрій для заповнення рідиною пакетів з фольги з шийкою
Номер патенту: 86210
Опубліковано: 10.04.2009
Автори: Вільд Др. Ганс-Петер, Крафт Ебергард
МПК: B65B 31/04, B65B 3/04, B67C 3/00
Мітки: заповнення, шийкою, фольги, рідиною, пакетів, пристрій, спосіб
Формула / Реферат:
1. Спосіб заповнення рідиною пакетів з фольги (2) з шийкою (3), який має у своєму складі такі стадії:a) прилаштування шийки (3) до отвору для заповнення (4);b) вакуумування пакета з фольги (2) через шийку (3);c) заповнення пакета з фольги (2) рідиною через шийку (3);d) висмоктування рідини із отвору для заповнення (4);e) впускання невеликої дози стерильного газу через шийку (3) в пакет з фольги (2), який...
Пристрій і спосіб для заповнення газом каналу в контейнері
Номер патенту: 91226
Опубліковано: 12.07.2010
Автор: Густафссон Пер
МПК: B31B 1/00, B65D 33/06, B65D 30/16, B65B 61/00
Мітки: заповнення, спосіб, газом, контейнері, каналу, пристрій
Формула / Реферат:
1. Пристрій (20) для заповнення газом каналу (7) в складаному контейнері (1), причому канал (7) утворений першою і другою бічними стінками (2) контейнера (1), які з'єднані по загальній з'єднувальній частині (4), а канал (7) включає в себе впускний отвір (15), розташований в першій бічній стінці (2), при цьому пристрій (20) містить:упор (21) ігазовий модуль (26) з випускним отвором (28), який розташований в поверхні газового...
Попередній патент: Машина для чищення, прання, сушіння і прасування білизни і одягу
Наступний патент: Недетермінований генератор рівномірно розподілених випадкових послідовностей
Випадковий патент: Пюре для дитячого харчування "кроха"