Вітродвигун з вертикальною віссю
Формула / Реферат
1. Вітродвигун з вертикальною віссю, що містить центральний обертальний стояк, до якого прикріплені вертикальні лопаті, який відрізняється тим, що вказані лопаті можуть обертатись відносно своєї власної осі і переміщуватись радіально відносно центрального стояка, причому рух кожної лопаті контролюється автономно, в залежності від умов, яким вона піддана у кожну мить.
2. Вітродвигун з вертикальною віссю за п. 1, який відрізняється тим, що принаймні один з кінців кожного вала обертання лопатей ковзає у радіальному напрямку відносно центрального стояка.
3. Вітродвигун з вертикальною віссю за п. 2, який відрізняється тим, що нижній край кожного вала обертання лопатей є радіально рухомим.
4. Вітродвигун з вертикальною віссю за п. 3, який відрізняється тим, що два кінці кожного вала обертання лопатей є радіально рухомими незалежно один від одного.
5. Вітродвигун з вертикальною віссю за одним з пп. 3-4, який відрізняється тим, що кінці валів обертання лопатей зв'язані з кронштейнами, з можливістю переміщення радіально від центрального обертального стояка.
6. Вітродвигун з вертикальною віссю за п. 5, який відрізняється тим, що кронштейни обладнані полозками, з можливістю переміщення по своїй осі.
7. Вітродвигун з вертикальною віссю за будь-яким з попередніх пунктів, який відрізняється тим, що лопаті є жорсткими.
8. Вітродвигун з вертикальною віссю за п. 7, який відрізняється тим, що поперечний переріз лопатей має форму подовженої літери S.
9. Вітродвигун з вертикальною віссю за одним із пп. 7 або 8, який відрізняється тим, що лопаті складаються з кількох збірних частин.
10. Вітродвигун з вертикальною віссю за одним із пп. 1-6, який відрізняється тим, що лопаті виготовлені з м'якого матеріалу, наприклад такого, що використовується для вітрил.
11. Вітродвигун з вертикальною віссю за п. 10, який відрізняється тим, що лопаті складаються усередині або навколо нижньої опори за допомогою кабелів, зв'язаних з верхньою опорою.
12. Вітродвигун з вертикальною віссю за п. 11, який відрізняється тим, що принаймні верхня опора обладнана пристроєм амортизації.
13. Вітродвигун з вертикальною віссю за одним із пп. 7-12, який відрізняється тим, що подовжній переріз лопатей вписується в трапецію.
14. Вітродвигун з вертикальною віссю за будь-яким з попередніх пунктів, який відрізняється тим, що позиція валів обертання лопатей відносно центрального стояка і кутова позиція лопатей управляється за допомогою принаймні одного комп'ютера, з яким зв'язані датчики метеорологічних параметрів навколишнього середовища вітродвигуна, причому вказані комп'ютери приводять у дію двигуни, які діють на лопаті.
15. Вітродвигун з вертикальною віссю за п. 14, який відрізняється тим, що комп'ютер може прискорювати або гальмувати обертання кожної лопаті для оптимізації її позиції відносно умов вітру з метою покращення коефіцієнта корисної дії.
16. Вітродвигун з вертикальною віссю за одним з пп. 14 або 15, який відрізняється тим, що параметри, які ураховуються комп'ютерами, є такими: швидкість і напрям вітру за вимірами флюгером і анемометром; позиція лопатей; швидкість і споживання енергії вітродвигуном; споживання енергії лопатями; температура атмосфери і компонентів вітродвигуна.
17. Вітродвигун з вертикальною віссю за одним з пп. 14-16, який відрізняється тим, що комп'ютери можуть управлятись зовнішнім комп'ютером.
18. Вітродвигун з вертикальною віссю за одним з пп. 14-17, який відрізняється тим, що приводні двигуни, що діють на лопаті, є електродвигунами.
19. Вітродвигун з вертикальною віссю за одним з пп. 14-18, який відрізняється тим, що вказані датчики метеорологічних параметрів встановлені понад лопатями.
20. Вітродвигун з вертикальною віссю за будь-яким з попередніх пунктів, який відрізняється тим, що пристрої перетворювання енергії, зокрема електрогенератор, розташовані на рівні основи вітродвигуна, під центральним обертальним стояком.
21. Вітродвигун з вертикальною віссю за будь-яким з попередніх пунктів, який відрізняється тим, що обертальний стояк оточує фіксований стояк.
22. Вітродвигун з вертикальною віссю за п. 21, який відрізняється тим, що фіксований стояк має понад собою верхню кабіну і обладнаний засобами доступу до цієї кабіни.
23. Вітродвигун з вертикальною віссю за п. 22, який відрізняється тим, що засоби доступу до верхньої кабіни складаються зі сходів та/або ліфта.
24. Вітродвигун з вертикальною віссю за одним з пп. 21-23, який відрізняється тим, що фіксований стояк складається з телескопічних елементів.
25. Вітродвигун з вертикальною віссю за будь-яким з попередніх пунктів, який відрізняється тим, що центральний обертальний стояк складається з легких або ажурних елементів.
26. Вітродвигун з вертикальною віссю за будь-яким з попередніх пунктів, який відрізняється тим, що він закріплюється на землі за допомогою відтяжок.
27. Вітродвигун з вертикальною віссю за будь-яким з попередніх пунктів, який відрізняється тим, що технічне приміщення розташовується на основі центрального обертального стояка.
Текст
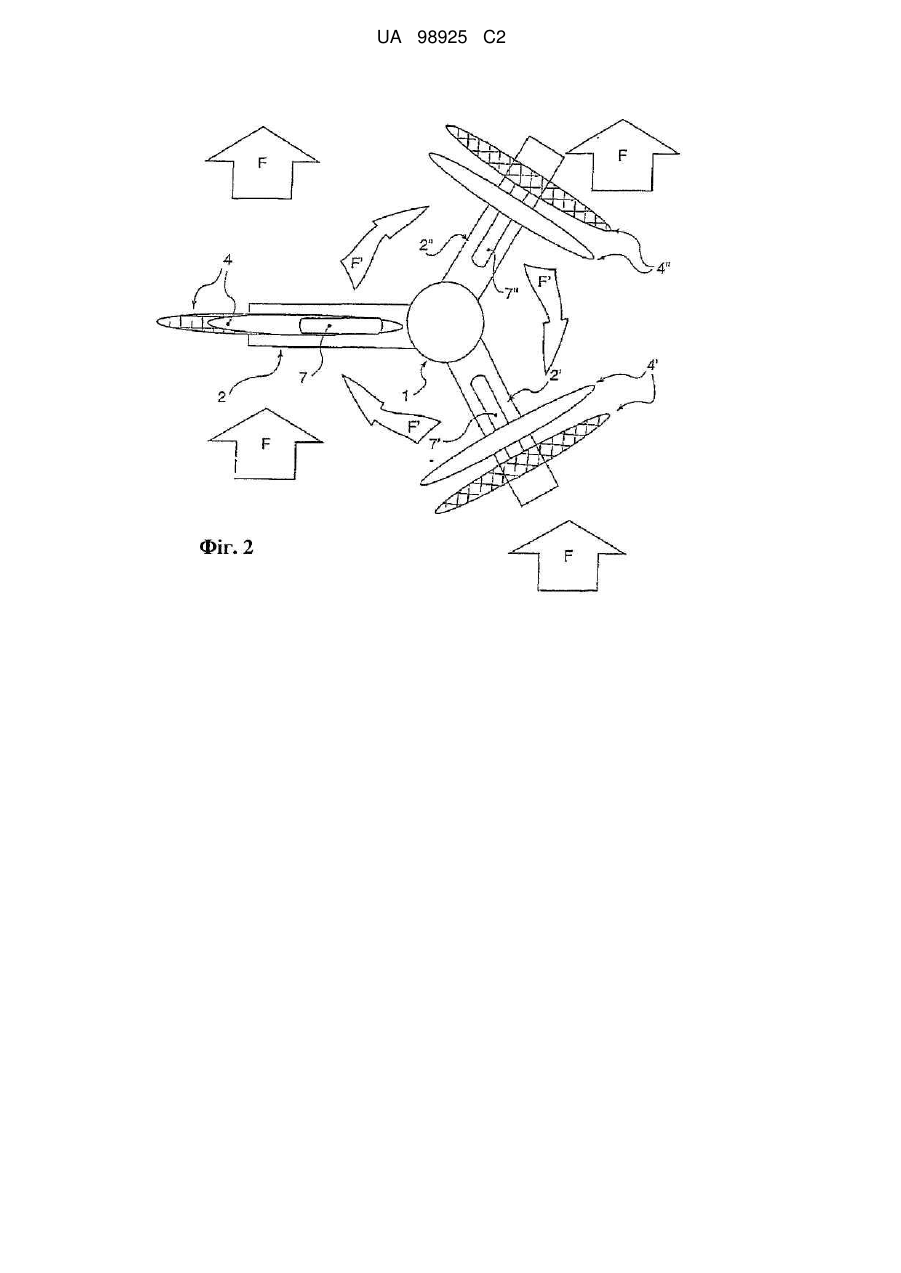
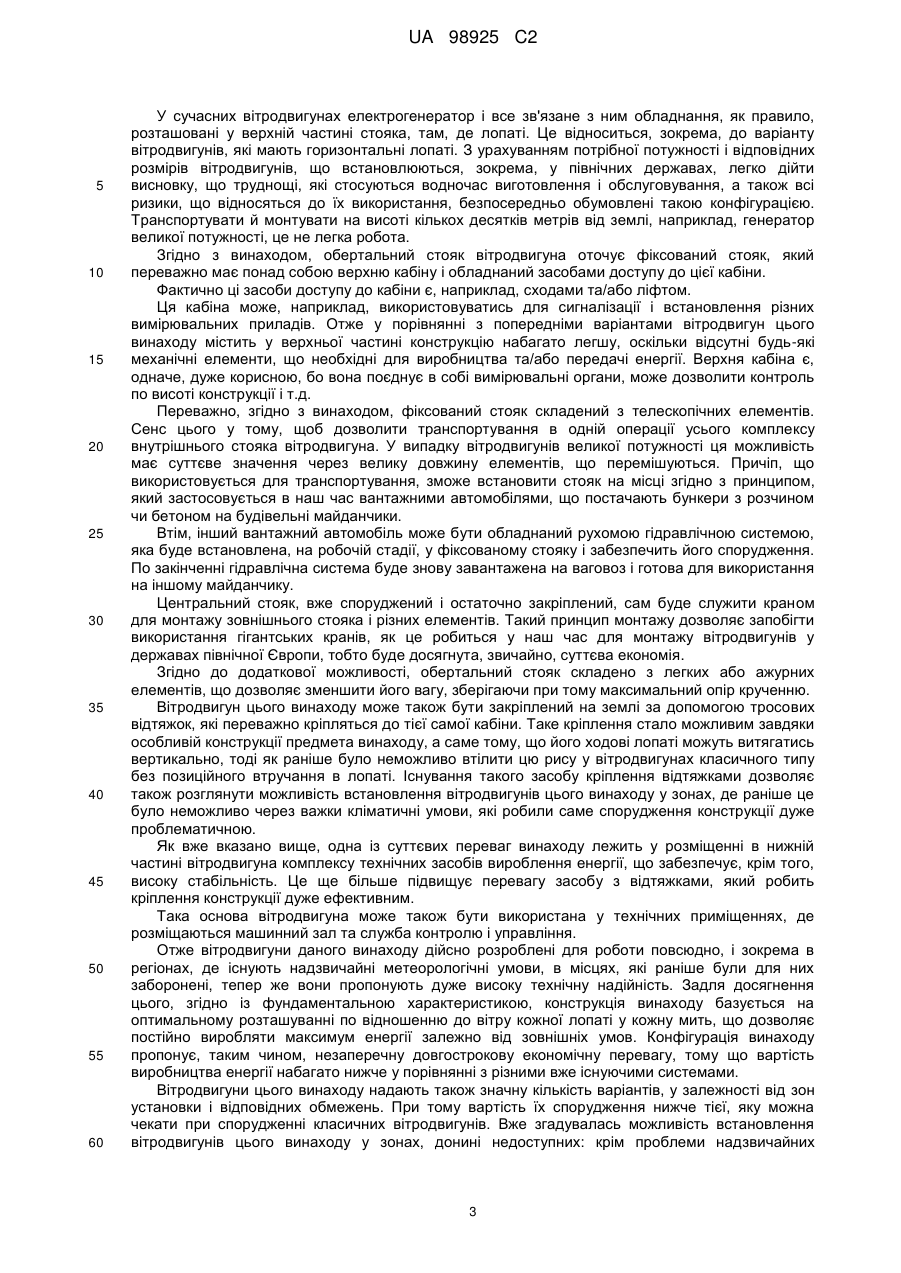
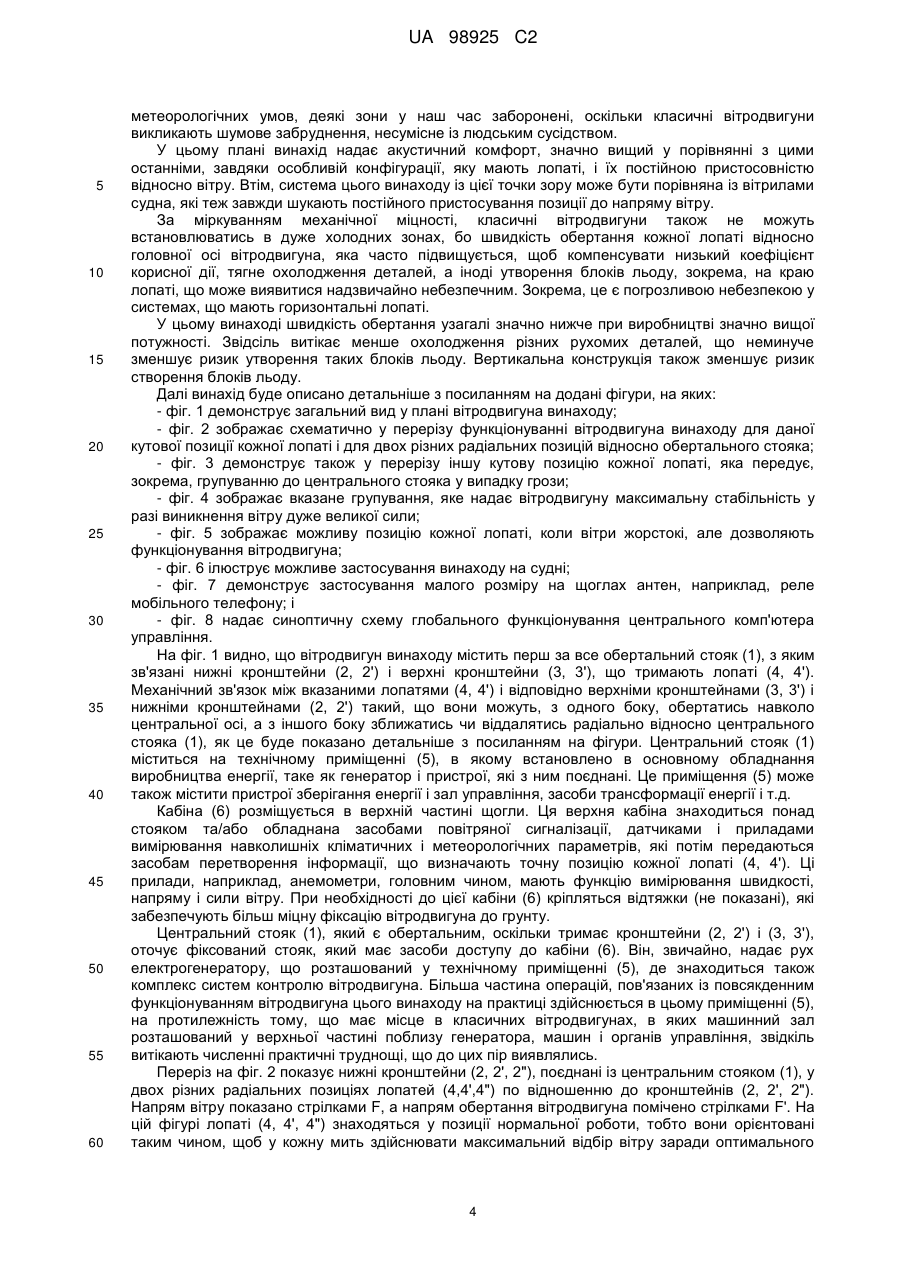
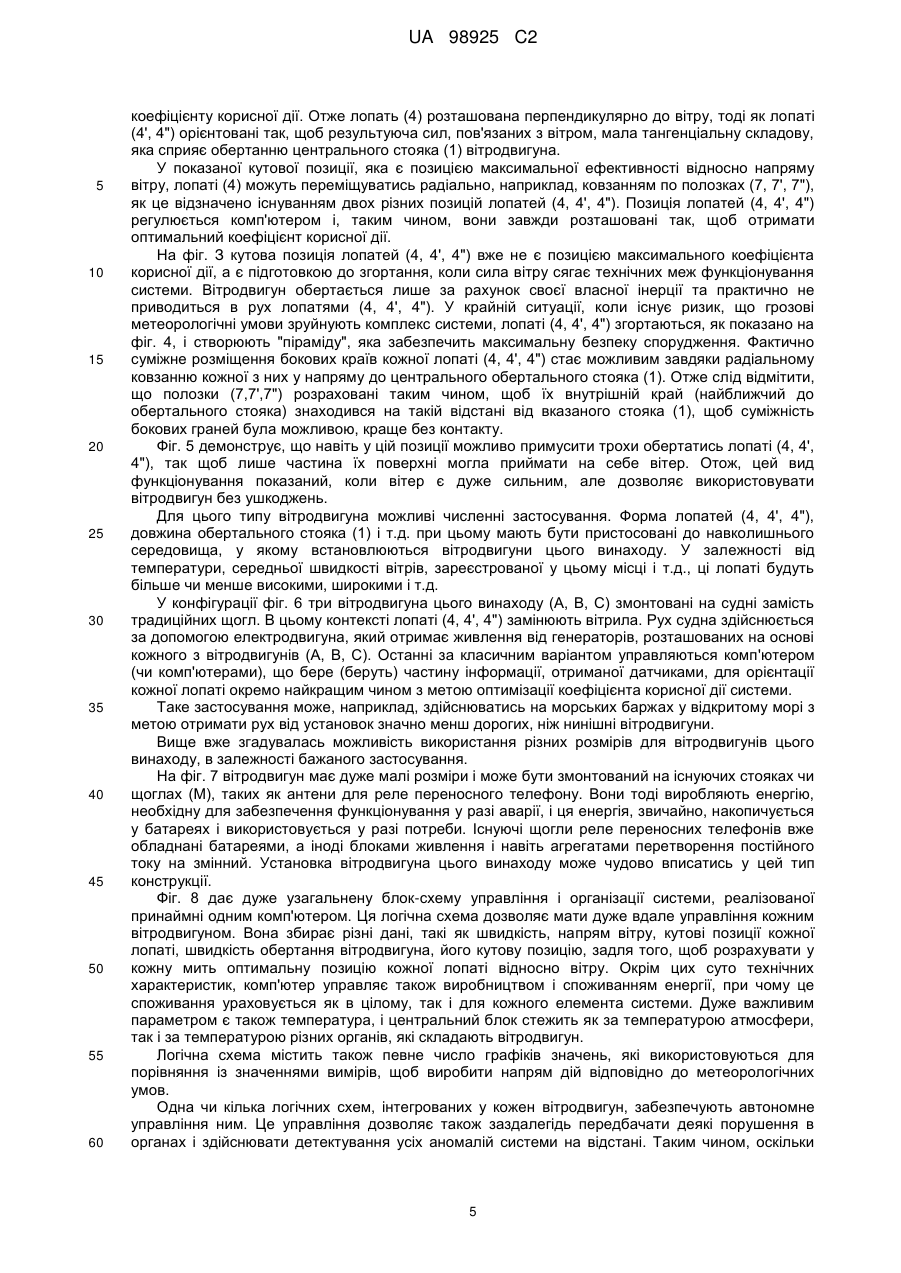
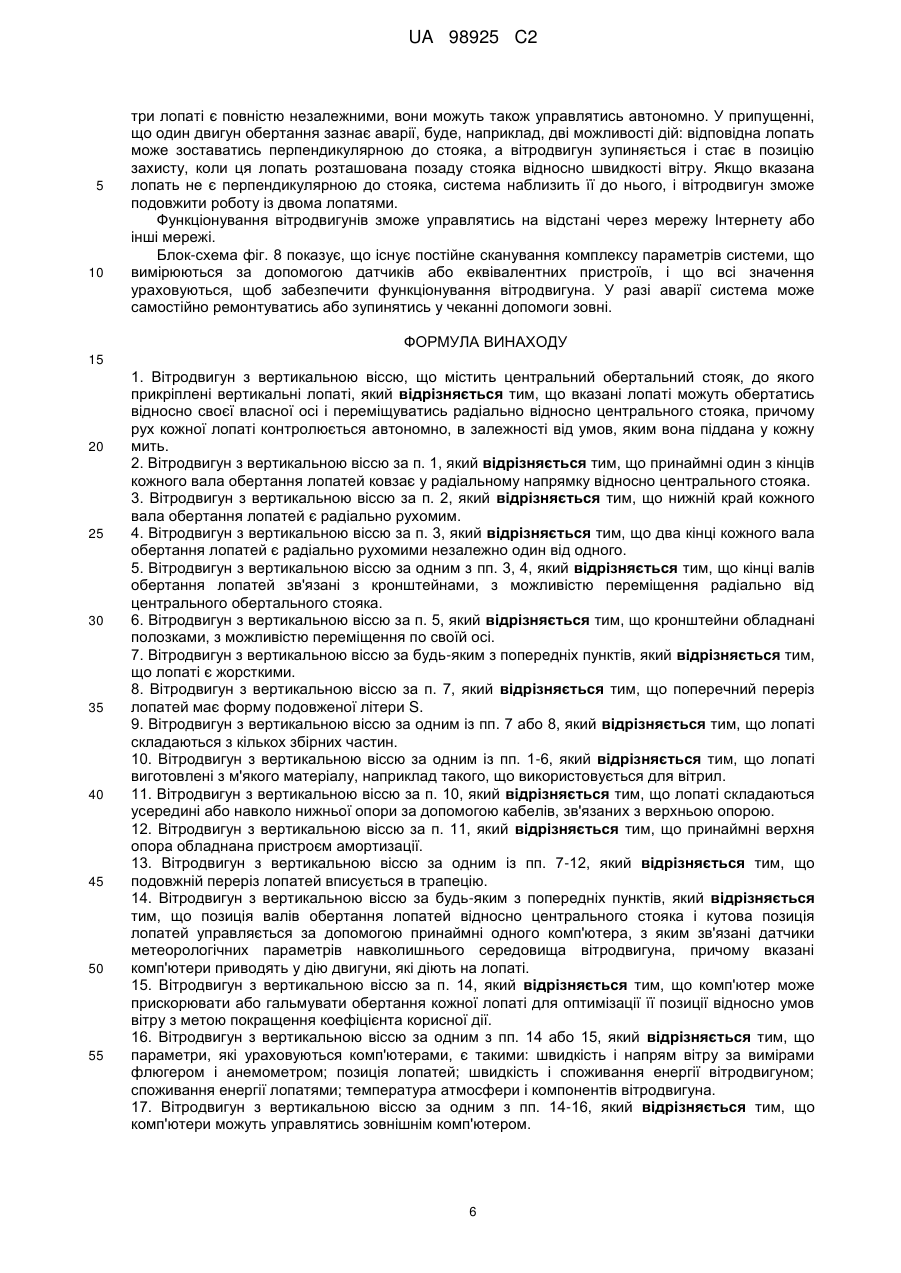
Реферат: Вітродвигун з вертикальною віссю містить центральний обертальний стояк, до якого прикріплені вертикальні лопаті, причому вказані лопаті можуть обертатись відносно своєї власної осі і переміщуватись радіально відносно центрального стояка. Рух кожної лопаті контролюється автономно, в залежності від умов, яким вона піддана у кожну мить, з метою оптимізації загального коефіцієнта корисної дії вітродвигуна. UA 98925 C2 (12) UA 98925 C2 UA 98925 C2 5 10 15 20 25 30 35 40 45 50 55 Цей винахід стосується вітродвигуна з вертикальною віссю, концепція якого була піддана оптимізації для можливості роботи практично у будь-яких кліматичних умовах з підвищеним коефіцієнтом корисної дії, що дозволяє значно зменшити вартість енергії. Логіка розробників дозволяє також досягти надзвичайно надійної конфігурації, що відрізняється небувалою у системах такого типу легкістю конструкції і обслуговування. Згідно з винаходом, вітродвигун містить, як у класичному варіанті, центральний обертальний стояк, до якого прикріплені лопаті, і він відрізняється, головним чином, тим, що вказані лопаті можуть обертатись і переміщатись радіально відносно центрального стояка, причому рух кожної лопаті контролюється і управляється автономно незалежно від умов, яким вона піддана у кожну дану мить, здійснюючі оптимізацію загального коефіцієнта корисної дії вітродвигуна. Ця характеристика, яка становить суть винаходу, повинна дозволити вітродвигуну функціонувати у більшості випадків метеорологічних умов. У деяких документах, таких, як патент US-6 370 915 та патент DE-195 44 400, йде мова про вітродвигуни, в яких кутова позиція лопаті управляється комп'ютером. Однак у цих двох випадках кутова позиція кожної лопаті заздалегідь передбачена програмою, залежно від обмеженої кількості моделей, які ураховують силу вітру, і отже лопаті не управляються повністю автономно у кожну мить. Конструкція цього винаходу пропонує кілька ступенів свободи при регулюванні лопаті, що дозволяє розмістити лопаті оптимально, зокрема, відносно вітру, незалежно одна від одної, і тим забезпечити підвищену ефективність функціонування, а також у разі потреби розмістити лопаті сильно згорнутими, якщо швидкість вітру стала занадто високою, наприклад, при грозі. У цьому випадку позиція кожній лопаті вже не відповідає динамічному сприйняттю вітру, і вітродвигун зупиняється заради безпеки. Точніше кажучи, принаймні один з кінців кожного валу обертання лопаті є ковзним у радіальному напрямку відносно центрального стояка. У припущенні, що тільки один кінець кожного вала є радіально рухомим, йдеться переважно про нижній кінець. Проте можна передбачити, щоб два кінця кожного вала обертання лопаті були рухомими радіально незалежно одне від одного. Вибір між одиничним варіантом і дублюванням можливостей радіального переміщення залежить від сфери застосування, регіону установки вітродвигуна і т.д. Із практичної точки зору ця можливість радіального переміщення забезпечується зв'язком кінців валів обертання кожної лопаті з кронштейнами, які відходять радіально від центрального стояка. Точніше, ці кронштейни обладнані напрямними, що розташовані по їх осі. Таким чином, на противагу існуючим вітродвигунам, у даному винаході лопаті в усіх випадках мають дві точки кріплення, що дозволяє виготовляти їх з набагато більшою площею поверхні і отримувати з того значно більшу потужність, зокрема, у сприятливих умовах вітру. У першій версії реалізації винаходу лопаті є жорсткими. Отже вони виготовляються на класичний манер з матеріалів, які дозволяють підставити вітру поверхню, що не деформується. Згідно з можливою конфігурацією, поперечний переріз лопаті має форму подовженої літери S. Хвилеподібна зовнішня поверхня, яка при цьому утворюється, сприяє подальшій оптимізації дії вітру на кожну лопать, що забезпечує найкраще управління потоками повітря і їх турбулентністю поблизу поверхні. Відсилання згаданих потоків до зовнішньої периферії кожної лопаті поліпшується завдяки цій формі, і звідсіль зменшення турбулентності і найкраще використання сили вітру. До того ж, ця S-подібна форма дозволяє підвищити аеродинамічні характеристики лопаті під час руху. Додаткова можливість полягає в тому, що лопаті можуть складатися з кількох збірних частин. Це має на меті зробити транспортування зручнішим, а монтаж на місці легшим, якщо лопаті мають дуже великі розміри. Згідно з другим можливим варіантом винаходу, лопаті можуть бути виготовлені з м'якого матеріалу, наприклад, того, що використовується для вітрил. Окрім дуже сприятливого економічного ефекту, оскільки цей тип лопаті має собівартість значно нижчу у порівнянні з жорстким типом, ці лопаті можуть використовуватись у випадках, коли вони мають подвійну функцію: наприклад, у разі використання на суднах чи парусниках, тримаючи лопаті у фіксованої позиції, вони можуть виконувати ті ж самі функції, що вітрило на паруснику. У цьому припущенні вітродвигун, що має м'які лопаті, встановлений на судні, зможе виконувати функцію генератора для живлення судового двигуна, коли вітрильна навігація не є можливою, або функцію класичного вітрила, коли використання двигуна не потрібне. 1 UA 98925 C2 5 10 15 20 25 30 35 40 45 50 55 В цій конфігурації лопаті можуть бути згорнуті усередину або навкруги нижньої опори і розгорнуті за допомогою кабелів, взаємодіючі з верхньою опорою. Інакше кажучи, кожна лопать може бути прибрана згортанням. Для того, щоб запобігти вібрацій, зокрема, коли тріпотить вітрило, принаймні верхня опора обладнана пристроєм для амортизації. Поперечний переріз лопаті може вписатись в трапецію, будь то жорсткі чи м'які лопаті. Зокрема, але не виключно, у випадку вітрил, основа вітрила тоді більше, ніж його верхня грань. Лопаті, навіть якщо вони мають велику поверхню, повинні у будь-який момент правильно і швидко прийняти орієнтацію відносно вітру, так щоб здійснити оптимізацію ефективності системи, а також знов згорнутись з наступом грози. Крім того, це має бути виконано якомога швидше завдяки безперервному вимірюванню метеорологічних параметрів і негайному передаванню цих вимірів для прийняття ефективної позиції кожної лопаті. Саме в цьому причина, з якої радіальна позиція валів обертання кожної лопаті, а також їх кутова позиція переважно управляються принаймні одним комп'ютером, з яким зв'язані датчики метеорологічних параметрів навколишнього середовища вітродвигуна, а вже ці комп'ютери управляють приводом кожної лопаті. Ця характеристика, хоч і не є суворо необхідною, все ж є суттєвою для більшості застосувань. Комп'ютер, який розраховує, зокрема, рух обертання кожної лопаті, може прискорити або пригальмувати його задля оптимізації її позиції відносно умов вітру, щоб покращити загальний коефіцієнт корисної дії вітродвигуна. Таким чином, кожна лопать буде мати у будь-який момент ідеальну позицію зіткнення з вітром. Параметри, що приймаються одним чи кількома комп'ютерами: - швидкість і напрям вітру згідно з вимірами флюгером і анемометром; - позиція лопаті; - швидкість вітродвигуна і витрата ним енергії; - витрата кожної лопаті; - температура повітря і складових частин вітродвигуна. Ці параметри залежать, зокрема, від числа і виду встановлених датчиків, виконавчих механізмів, які забезпечують виконання програми комп'ютера, а також логічної схеми, яка здійснює обертання агрегату. У цьому зв'язку слід відмітити, що комп'ютер чи комп'ютери можуть бути поєднані зовнішнім комп'ютером, зокрема, для зміни деяких даних, і в цілому для покращення чи коригування логіки управління. Серед виконавчих механізмів вже згадані засоби приводу є переважно електродвигунами. У підсумку, рух кожної лопаті контролюється комп'ютером за допомогою однієї чи кількох логічних схем, які розроблені для приведення у відповідність фізичних елементів системи, а саме структури і розмірів кожної лопаті і взагалі вітродвигуна з метеорологічними параметрами та вимірами. Позиція кожної лопаті у цьому разі постійно підкорена метеорологічним і кліматичним умовам, і реакція системи на виміри значень відбувається майже негайно. Коли швидкість вітру, наприклад, раптом зростає, лопаті переміщуються системою, щоб наблизити їх до обертального стояка, і їх орієнтування здійснюється таким чином, щоб вони не підставляли дії вітру всю свою поверхню. І навпаки, якщо вітер стає слабким, лопаті розгортаються, підставляючи більшу поверхню, і здійснюють виробництво енергії в оптимальних умовах. Управління водночас кутовою і радіальною позицією кожної лопаті відносно центрального стояка, незалежно одна від одної у кожну мить, у функції певних кліматичних параметрів дозволяє отримати максимальний коефіцієнт корисної дії системи і відповідно найбільше виробництво енергії у кожну мить. Згідно з можливостями, датчики встановлюються понад лопаттю, тобто у зоні, де виміри швидкості і сили вітру найбільш суттєві. Ці датчики і взагалі всі вимірювальні пристрої не піддаються ніякому впливу підчас руху лопаті. З іншого боку, структура вітродвигуна цього винаходу є така, що пристрої перетворення енергії, і зокрема електрогенератор, розміщені на рівні основи вітродвигуна, під центральним обертальним стояком. Така конфігурація є особливо сприятливою, зокрема по відношенню до конструкцій нині існуючих, бо вона дозволяє отримати блискучу стабільність вітродвигуна і суттєво зменшує ризик у разі аварії. Також виготовлення і експлуатація вітродвигуна є значно легшими завдяки такій конструкції. 2 UA 98925 C2 5 10 15 20 25 30 35 40 45 50 55 60 У сучасних вітродвигунах електрогенератор і все зв'язане з ним обладнання, як правило, розташовані у верхній частині стояка, там, де лопаті. Це відноситься, зокрема, до варіанту вітродвигунів, які мають горизонтальні лопаті. З урахуванням потрібної потужності і відповідних розмірів вітродвигунів, що встановлюються, зокрема, у північних державах, легко дійти висновку, що труднощі, які стосуються водночас виготовлення і обслуговування, а також всі ризики, що відносяться до їх використання, безпосередньо обумовлені такою конфігурацією. Транспортувати й монтувати на висоті кількох десятків метрів від землі, наприклад, генератор великої потужності, це не легка робота. Згідно з винаходом, обертальний стояк вітродвигуна оточує фіксований стояк, який переважно має понад собою верхню кабіну і обладнаний засобами доступу до цієї кабіни. Фактично ці засоби доступу до кабіни є, наприклад, сходами та/або ліфтом. Ця кабіна може, наприклад, використовуватись для сигналізації і встановлення різних вимірювальних приладів. Отже у порівнянні з попередніми варіантами вітродвигун цього винаходу містить у верхньої частині конструкцію набагато легшу, оскільки відсутні будь-які механічні елементи, що необхідні для виробництва та/або передачі енергії. Верхня кабіна є, одначе, дуже корисною, бо вона поєднує в собі вимірювальні органи, може дозволити контроль по висоті конструкції і т.д. Переважно, згідно з винаходом, фіксований стояк складений з телескопічних елементів. Сенс цього у тому, щоб дозволити транспортування в одній операції усього комплексу внутрішнього стояка вітродвигуна. У випадку вітродвигунів великої потужності ця можливість має суттєве значення через велику довжину елементів, що перемішуються. Причіп, що використовується для транспортування, зможе встановити стояк на місці згідно з принципом, який застосовується в наш час вантажними автомобілями, що постачають бункери з розчином чи бетоном на будівельні майданчики. Втім, інший вантажний автомобіль може бути обладнаний рухомою гідравлічною системою, яка буде встановлена, на робочій стадії, у фіксованому стояку і забезпечить його спорудження. По закінченні гідравлічна система буде знову завантажена на ваговоз і готова для використання на іншому майданчику. Центральний стояк, вже споруджений і остаточно закріплений, сам буде служити краном для монтажу зовнішнього стояка і різних елементів. Такий принцип монтажу дозволяє запобігти використання гігантських кранів, як це робиться у наш час для монтажу вітродвигунів у державах північної Європи, тобто буде досягнута, звичайно, суттєва економія. Згідно до додаткової можливості, обертальний стояк складено з легких або ажурних елементів, що дозволяє зменшити його вагу, зберігаючи при тому максимальний опір крученню. Вітродвигун цього винаходу може також бути закріплений на землі за допомогою тросових відтяжок, які переважно кріпляться до тієї самої кабіни. Таке кріплення стало можливим завдяки особливій конструкції предмета винаходу, а саме тому, що його ходові лопаті можуть витягатись вертикально, тоді як раніше було неможливо втілити цю рису у вітродвигунах класичного типу без позиційного втручання в лопаті. Існування такого засобу кріплення відтяжками дозволяє також розглянути можливість встановлення вітродвигунів цього винаходу у зонах, де раніше це було неможливо через важки кліматичні умови, які робили саме спорудження конструкції дуже проблематичною. Як вже вказано вище, одна із суттєвих переваг винаходу лежить у розміщенні в нижній частині вітродвигуна комплексу технічних засобів вироблення енергії, що забезпечує, крім того, високу стабільність. Це ще більше підвищує перевагу засобу з відтяжками, який робить кріплення конструкції дуже ефективним. Така основа вітродвигуна може також бути використана у технічних приміщеннях, де розміщаються машинний зал та служба контролю і управління. Отже вітродвигуни даного винаходу дійсно розроблені для роботи повсюдно, і зокрема в регіонах, де існують надзвичайні метеорологічні умови, в місцях, які раніше були для них заборонені, тепер же вони пропонують дуже високу технічну надійність. Задля досягнення цього, згідно із фундаментальною характеристикою, конструкція винаходу базується на оптимальному розташуванні по відношенню до вітру кожної лопаті у кожну мить, що дозволяє постійно виробляти максимум енергії залежно від зовнішніх умов. Конфігурація винаходу пропонує, таким чином, незаперечну довгострокову економічну перевагу, тому що вартість виробництва енергії набагато нижче у порівнянні з різними вже існуючими системами. Вітродвигуни цього винаходу надають також значну кількість варіантів, у залежності від зон установки і відповідних обмежень. При тому вартість їх спорудження нижче тієї, яку можна чекати при спорудженні класичних вітродвигунів. Вже згадувалась можливість встановлення вітродвигунів цього винаходу у зонах, донині недоступних: крім проблеми надзвичайних 3 UA 98925 C2 5 10 15 20 25 30 35 40 45 50 55 60 метеорологічних умов, деякі зони у наш час заборонені, оскільки класичні вітродвигуни викликають шумове забруднення, несумісне із людським сусідством. У цьому плані винахід надає акустичний комфорт, значно вищий у порівнянні з цими останніми, завдяки особливій конфігурації, яку мають лопаті, і їх постійною пристосовністю відносно вітру. Втім, система цього винаходу із цієї точки зору може бути порівняна із вітрилами судна, які теж завжди шукають постійного пристосування позиції до напряму вітру. За міркуванням механічної міцності, класичні вітродвигуни також не можуть встановлюватись в дуже холодних зонах, бо швидкість обертання кожної лопаті відносно головної осі вітродвигуна, яка часто підвищується, щоб компенсувати низький коефіцієнт корисної дії, тягне охолодження деталей, а іноді утворення блоків льоду, зокрема, на краю лопаті, що може виявитися надзвичайно небезпечним. Зокрема, це є погрозливою небезпекою у системах, що мають горизонтальні лопаті. У цьому винаході швидкість обертання узагалі значно нижче при виробництві значно вищої потужності. Звідсіль витікає менше охолодження різних рухомих деталей, що неминуче зменшує ризик утворення таких блоків льоду. Вертикальна конструкція також зменшує ризик створення блоків льоду. Далі винахід буде описано детальніше з посиланням на додані фігури, на яких: - фіг. 1 демонструє загальний вид у плані вітродвигуна винаходу; - фіг. 2 зображає схематично у перерізу функціонуванні вітродвигуна винаходу для даної кутової позиції кожної лопаті і для двох різних радіальних позицій відносно обертального стояка; - фіг. 3 демонструє також у перерізу іншу кутову позицію кожної лопаті, яка передує, зокрема, групуванню до центрального стояка у випадку грози; - фіг. 4 зображає вказане групування, яке надає вітродвигуну максимальну стабільність у разі виникнення вітру дуже великої сили; - фіг. 5 зображає можливу позицію кожної лопаті, коли вітри жорстокі, але дозволяють функціонування вітродвигуна; - фіг. 6 ілюструє можливе застосування винаходу на судні; - фіг. 7 демонструє застосування малого розміру на щоглах антен, наприклад, реле мобільного телефону; і - фіг. 8 надає синоптичну схему глобального функціонування центрального комп'ютера управління. На фіг. 1 видно, що вітродвигун винаходу містить перш за все обертальний стояк (1), з яким зв'язані нижні кронштейни (2, 2') і верхні кронштейни (3, 3'), що тримають лопаті (4, 4'). Механічний зв'язок між вказаними лопатями (4, 4') і відповідно верхніми кронштейнами (3, 3') і нижніми кронштейнами (2, 2') такий, що вони можуть, з одного боку, обертатись навколо центральної осі, а з іншого боку зближатись чи віддалятись радіально відносно центрального стояка (1), як це буде показано детальніше з посиланням на фігури. Центральний стояк (1) міститься на технічному приміщенні (5), в якому встановлено в основному обладнання виробництва енергії, таке як генератор і пристрої, які з ним поєднані. Це приміщення (5) може також містити пристрої зберігання енергії і зал управління, засоби трансформації енергії і т.д. Кабіна (6) розміщується в верхній частині щогли. Ця верхня кабіна знаходиться понад стояком та/або обладнана засобами повітряної сигналізації, датчиками і приладами вимірювання навколишніх кліматичних і метеорологічних параметрів, які потім передаються засобам перетворення інформації, що визначають точну позицію кожної лопаті (4, 4'). Ці прилади, наприклад, анемометри, головним чином, мають функцію вимірювання швидкості, напряму і сили вітру. При необхідності до цієї кабіни (6) кріпляться відтяжки (не показані), якізабезпечують більш міцну фіксацію вітродвигуна до грунту. Центральний стояк (1), який є обертальним, оскільки тримає кронштейни (2, 2') і (3, 3'), оточує фіксований стояк, який має засоби доступу до кабіни (6). Він, звичайно, надає рух електрогенератору, що розташований у технічному приміщенні (5), де знаходиться також комплекс систем контролю вітродвигуна. Більша частина операцій, пов'язаних із повсякденним функціонуванням вітродвигуна цього винаходу на практиці здійснюється в цьому приміщенні (5), на протилежність тому, що має місце в класичних вітродвигунах, в яких машинний зал розташований у верхньої частині поблизу генератора, машин і органів управління, звідкіль витікають численні практичні труднощі, що до цих пір виявлялись. Переріз на фіг. 2 показує нижні кронштейни (2, 2', 2"), поєднані із центральним стояком (1), у двох різних радіальних позиціях лопатей (4,4',4") по відношенню до кронштейнів (2, 2', 2"). Напрям вітру показано стрілками F, а напрям обертання вітродвигуна помічено стрілками F'. На цій фігурі лопаті (4, 4', 4") знаходяться у позиції нормальної роботи, тобто вони орієнтовані таким чином, щоб у кожну мить здійснювати максимальний відбір вітру заради оптимального 4 UA 98925 C2 5 10 15 20 25 30 35 40 45 50 55 60 коефіцієнту корисної дії. Отже лопать (4) розташована перпендикулярно до вітру, тоді як лопаті (4', 4") орієнтовані так, щоб результуюча сил, пов'язаних з вітром, мала тангенціальну складову, яка сприяє обертанню центрального стояка (1) вітродвигуна. У показаної кутової позиції, яка є позицією максимальної ефективності відносно напряму вітру, лопаті (4) можуть переміщуватись радіально, наприклад, ковзанням по полозках (7, 7', 7"), як це відзначено існуванням двох різних позицій лопатей (4, 4', 4"). Позиція лопатей (4, 4', 4") регулюється комп'ютером і, таким чином, вони завжди розташовані так, щоб отримати оптимальний коефіцієнт корисної дії. На фіг. З кутова позиція лопатей (4, 4', 4") вже не є позицією максимального коефіцієнта корисної дії, а є підготовкою до згортання, коли сила вітру сягає технічних меж функціонування системи. Вітродвигун обертається лише за рахунок своєї власної інерції та практично не приводиться в рух лопатями (4, 4', 4"). У крайній ситуації, коли існує ризик, що грозові метеорологічні умови зруйнують комплекс системи, лопаті (4, 4', 4") згортаються, як показано на фіг. 4, і створюють "піраміду", яка забезпечить максимальну безпеку спорудження. Фактично суміжне розміщення бокових країв кожної лопаті (4, 4', 4") стає можливим завдяки радіальному ковзанню кожної з них у напряму до центрального обертального стояка (1). Отже слід відмітити, що полозки (7,7',7") розраховані таким чином, щоб їх внутрішній край (найближчий до обертального стояка) знаходився на такій відстані від вказаного стояка (1), щоб суміжність бокових граней була можливою, краще без контакту. Фіг. 5 демонструє, що навіть у цій позиції можливо примусити трохи обертатись лопаті (4, 4', 4"), так щоб лише частина їх поверхні могла приймати на себе вітер. Отож, цей вид функціонування показаний, коли вітер є дуже сильним, але дозволяє використовувати вітродвигун без ушкоджень. Для цього типу вітродвигуна можливі численні застосування. Форма лопатей (4, 4', 4"), довжина обертального стояка (1) і т.д. при цьому мають бути пристосовані до навколишнього середовища, у якому встановлюються вітродвигуни цього винаходу. У залежності від температури, середньої швидкості вітрів, зареєстрованої у цьому місці і т.д., ці лопаті будуть більше чи менше високими, широкими і т.д. У конфігурації фіг. 6 три вітродвигуна цього винаходу (А, В, С) змонтовані на судні замість традиційних щогл. В цьому контексті лопаті (4, 4', 4") замінюють вітрила. Рух судна здійснюється за допомогою електродвигуна, який отримає живлення від генераторів, розташованих на основі кожного з вітродвигунів (А, В, С). Останні за класичним варіантом управляються комп'ютером (чи комп'ютерами), що бере (беруть) частину інформації, отриманої датчиками, для орієнтації кожної лопаті окремо найкращим чином з метою оптимізації коефіцієнта корисної дії системи. Таке застосування може, наприклад, здійснюватись на морських баржах у відкритому морі з метою отримати рух від установок значно менш дорогих, ніж нинішні вітродвигуни. Вище вже згадувалась можливість використання різних розмірів для вітродвигунів цього винаходу, в залежності бажаного застосування. На фіг. 7 вітродвигун має дуже малі розміри і може бути змонтований на існуючих стояках чи щоглах (М), таких як антени для реле переносного телефону. Вони тоді виробляють енергію, необхідну для забезпечення функціонування у разі аварії, і ця енергія, звичайно, накопичується у батареях і використовується у разі потреби. Існуючі щогли реле переносних телефонів вже обладнані батареями, а іноді блоками живлення і навіть агрегатами перетворення постійного току на змінний. Установка вітродвигуна цього винаходу може чудово вписатись у цей тип конструкції. Фіг. 8 дає дуже узагальнену блок-схему управління і організації системи, реалізованої принаймні одним комп'ютером. Ця логічна схема дозволяє мати дуже вдале управління кожним вітродвигуном. Вона збирає різні дані, такі як швидкість, напрям вітру, кутові позиції кожної лопаті, швидкість обертання вітродвигуна, його кутову позицію, задля того, щоб розрахувати у кожну мить оптимальну позицію кожної лопаті відносно вітру. Окрім цих суто технічних характеристик, комп'ютер управляє також виробництвом і споживанням енергії, при чому це споживання ураховується як в цілому, так і для кожного елемента системи. Дуже важливим параметром є також температура, і центральний блок стежить як за температурою атмосфери, так і за температурою різних органів, які складають вітродвигун. Логічна схема містить також певне число графіків значень, які використовуються для порівняння із значеннями вимірів, щоб виробити напрям дій відповідно до метеорологічних умов. Одна чи кілька логічних схем, інтегрованих у кожен вітродвигун, забезпечують автономне управління ним. Це управління дозволяє також заздалегідь передбачати деякі порушення в органах і здійснювати детектування усіх аномалій системи на відстані. Таким чином, оскільки 5 UA 98925 C2 5 10 три лопаті є повністю незалежними, вони можуть також управлятись автономно. У припущенні, що один двигун обертання зазнає аварії, буде, наприклад, дві можливості дій: відповідна лопать може зоставатись перпендикулярною до стояка, а вітродвигун зупиняється і стає в позицію захисту, коли ця лопать розташована позаду стояка відносно швидкості вітру. Якщо вказана лопать не є перпендикулярною до стояка, система наблизить її до нього, і вітродвигун зможе подовжити роботу із двома лопатями. Функціонування вітродвигунів зможе управлятись на відстані через мережу Інтернету або інші мережі. Блок-схема фіг. 8 показує, що існує постійне сканування комплексу параметрів системи, що вимірюються за допомогою датчиків або еквівалентних пристроїв, і що всі значення ураховуються, щоб забезпечити функціонування вітродвигуна. У разі аварії система може самостійно ремонтуватись або зупинятись у чеканні допомоги зовні. ФОРМУЛА ВИНАХОДУ 15 20 25 30 35 40 45 50 55 1. Вітродвигун з вертикальною віссю, що містить центральний обертальний стояк, до якого прикріплені вертикальні лопаті, який відрізняється тим, що вказані лопаті можуть обертатись відносно своєї власної осі і переміщуватись радіально відносно центрального стояка, причому рух кожної лопаті контролюється автономно, в залежності від умов, яким вона піддана у кожну мить. 2. Вітродвигун з вертикальною віссю за п. 1, який відрізняється тим, що принаймні один з кінців кожного вала обертання лопатей ковзає у радіальному напрямку відносно центрального стояка. 3. Вітродвигун з вертикальною віссю за п. 2, який відрізняється тим, що нижній край кожного вала обертання лопатей є радіально рухомим. 4. Вітродвигун з вертикальною віссю за п. 3, який відрізняється тим, що два кінці кожного вала обертання лопатей є радіально рухомими незалежно один від одного. 5. Вітродвигун з вертикальною віссю за одним з пп. 3, 4, який відрізняється тим, що кінці валів обертання лопатей зв'язані з кронштейнами, з можливістю переміщення радіально від центрального обертального стояка. 6. Вітродвигун з вертикальною віссю за п. 5, який відрізняється тим, що кронштейни обладнані полозками, з можливістю переміщення по своїй осі. 7. Вітродвигун з вертикальною віссю за будь-яким з попередніх пунктів, який відрізняється тим, що лопаті є жорсткими. 8. Вітродвигун з вертикальною віссю за п. 7, який відрізняється тим, що поперечний переріз лопатей має форму подовженої літери S. 9. Вітродвигун з вертикальною віссю за одним із пп. 7 або 8, який відрізняється тим, що лопаті складаються з кількох збірних частин. 10. Вітродвигун з вертикальною віссю за одним із пп. 1-6, який відрізняється тим, що лопаті виготовлені з м'якого матеріалу, наприклад такого, що використовується для вітрил. 11. Вітродвигун з вертикальною віссю за п. 10, який відрізняється тим, що лопаті складаються усередині або навколо нижньої опори за допомогою кабелів, зв'язаних з верхньою опорою. 12. Вітродвигун з вертикальною віссю за п. 11, який відрізняється тим, що принаймні верхня опора обладнана пристроєм амортизації. 13. Вітродвигун з вертикальною віссю за одним із пп. 7-12, який відрізняється тим, що подовжній переріз лопатей вписується в трапецію. 14. Вітродвигун з вертикальною віссю за будь-яким з попередніх пунктів, який відрізняється тим, що позиція валів обертання лопатей відносно центрального стояка і кутова позиція лопатей управляється за допомогою принаймні одного комп'ютера, з яким зв'язані датчики метеорологічних параметрів навколишнього середовища вітродвигуна, причому вказані комп'ютери приводять у дію двигуни, які діють на лопаті. 15. Вітродвигун з вертикальною віссю за п. 14, який відрізняється тим, що комп'ютер може прискорювати або гальмувати обертання кожної лопаті для оптимізації її позиції відносно умов вітру з метою покращення коефіцієнта корисної дії. 16. Вітродвигун з вертикальною віссю за одним з пп. 14 або 15, який відрізняється тим, що параметри, які ураховуються комп'ютерами, є такими: швидкість і напрям вітру за вимірами флюгером і анемометром; позиція лопатей; швидкість і споживання енергії вітродвигуном; споживання енергії лопатями; температура атмосфери і компонентів вітродвигуна. 17. Вітродвигун з вертикальною віссю за одним з пп. 14-16, який відрізняється тим, що комп'ютери можуть управлятись зовнішнім комп'ютером. 6 UA 98925 C2 5 10 15 20 18. Вітродвигун з вертикальною віссю за одним з пп. 14-17, який відрізняється тим, що приводні двигуни, що діють на лопаті, є електродвигунами. 19. Вітродвигун з вертикальною віссю за одним з пп. 14-18, який відрізняється тим, що вказані датчики метеорологічних параметрів встановлені понад лопатями. 20. Вітродвигун з вертикальною віссю за будь-яким з попередніх пунктів, який відрізняється тим, що пристрої перетворювання енергії, зокрема електрогенератор, розташовані на рівні основи вітродвигуна, під центральним обертальним стояком. 21. Вітродвигун з вертикальною віссю за будь-яким з попередніх пунктів, який відрізняється тим, що обертальний стояк оточує фіксований стояк. 22. Вітродвигун з вертикальною віссю за п. 21, який відрізняється тим, що фіксований стояк має понад собою верхню кабіну і обладнаний засобами доступу до цієї кабіни. 23. Вітродвигун з вертикальною віссю за п. 22, який відрізняється тим, що засоби доступу до верхньої кабіни складаються зі сходів та/або ліфта. 24. Вітродвигун з вертикальною віссю за одним з пп. 21-23, який відрізняється тим, що фіксований стояк складається з телескопічних елементів. 25. Вітродвигун з вертикальною віссю за будь-яким з попередніх пунктів, який відрізняється тим, що центральний обертальний стояк складається з легких або ажурних елементів. 26. Вітродвигун з вертикальною віссю за будь-яким з попередніх пунктів, який відрізняється тим, що він закріплюється на землі за допомогою відтяжок. 27. Вітродвигун з вертикальною віссю за будь-яким з попередніх пунктів, який відрізняється тим, що технічне приміщення розташовується на основі центрального обертального стояка. 7 UA 98925 C2 8 UA 98925 C2 9 UA 98925 C2 10 UA 98925 C2 11 UA 98925 C2 Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 12
ДивитисяДодаткова інформація
Назва патенту англійськоюVertical-axis wind turbine
Автори англійськоюVida Mark Firmiliano Manuel
Назва патенту російськоюВетродвигатель с вертикальной осью
Автори російськоюВида Марк Фирмилиано Манюель
МПК / Мітки
Мітки: вертикальною, вітродвигун, віссю
Код посилання
<a href="https://ua.patents.su/14-98925-vitrodvigun-z-vertikalnoyu-vissyu.html" target="_blank" rel="follow" title="База патентів України">Вітродвигун з вертикальною віссю</a>
Вітродвигун з вертикальною віссю обертання
Номер патенту: 13993
Опубліковано: 25.04.1997
Автори: Мойсеєнко Олександр Олегович, Науменко Володимир Якович, Чумак Микола Григорович
МПК: F03D 1/00, F03D 3/06, F03D 3/00
Мітки: вітродвигун, вертикальною, віссю, обертання
Формула / Реферат:
Вітродвигун з вертикальною віссю обертання, який складається з порожнинного конічного ротора з робочими елементами, направленого вершиною уверх від установочної поверхні та закріпленого на штанзі, має привод, зв'язаний з ротором, який відрізняється тим, що робочі елементи виконані у вигляді лопатей, закріплених на осі ротора, і мають у площині, перпендикулярній осі обертання ротора, евольвентну форму.
Вітродвигун з вертикальною віссю обертання

Номер патенту: 61447
Опубліковано: 17.11.2003
Автори: Карманов Сергій Вікторович, Карманова Вікторія Вікторовна, Карманов Віктор Васильович, Домбровська Людмила Антонівна, Юдін Роман Юрійович
Мітки: вертикальною, обертання, вітродвигун, віссю
Формула / Реферат:
Вітродвигун з вертикальною віссю обертання, який складається з закріпленого на штанзі з можливістю обертання порожнистого ротора з робочими елементами, виконаними у вигляді лопатей, які мають у площині, перпендикулярній осі обертання ротора, евольвентну форму, який відрізняється тим, що ротор має непарну кількість робочих елементів, виконаних у вигляді лопатей суцільно-комбінованої форми, які в площині, паралельній осі обертання ротора, мають...
Вітродвигун з вертикальною віссю обертання
Номер патенту: 35051
Опубліковано: 15.03.2001
Автор: Щербатюк Віктор Маркович
МПК: F03D 3/00
Мітки: вітродвигун, віссю, вертикальною, обертання
Формула / Реферат:
1. Вітродвигун з вертикальною віссю обертання, який має вертикальний вал або ротор, до якого приєднані радіальні махи. забезпечені упорами, та лопаті, шарнірно з'єднані з махами з можливістю обертання навколо махів та циклічної взаємодії з упорами, який відрізняється тим, що махи лопатей відхилені на гострий кут вниз від горизонтальної площини.2. Вітродвигун за п.1, який відрізняється тим, що упори виконані у вигляді підпорних...
Вітроенергетична установка з вертикальною віссю
Номер патенту: 50427
Опубліковано: 10.06.2010
Автори: Михайленко Олена Юріївна, Овчаров Сергій Володимирович
МПК: F03D 7/00
Мітки: вертикальною, вітроенергетична, установка, віссю
Формула / Реферат:
Вітроенергетична установка з вертикальною віссю, що складається з опори, на якій розміщені ярусно взаємно-перпендикулярно вали, до яких прикріплені під кутом 90° одна до одної поворотні лопаті, яка відрізняється тим, що лопаті фіксуються нерухомими клемовими з'єднаннями з упорами.
Вітряний двигун з вертикальною віссю обертання

Номер патенту: 56431
Опубліковано: 10.01.2011
Автори: Деркачов Сергій Володимирович, Ковязін Віктор Олексійович
МПК: F03D 3/00
Мітки: вертикальною, двигун, обертання, віссю, вітряний
Формула / Реферат:
Вітряний двигун з вертикальною віссю обертання, що містить порожнистий циліндричний корпус, в якому встановлено ротор з лопатями, з можливістю руху навколо вертикальної осі відносно горизонту, який відрізняється тим, що він оснащений додатковим електрогенератором, що складається зі збудника, закріпленого на кінцях лопатей ротора, і статорних обмоток, установлених по периметру внутрішньої сторони корпусу, який розташований на трубчастій щоглі...
Попередній патент: Пляшка з ковпачком, що нагвинчується, для фанатів
Наступний патент: Інгібітор мітотичних кінезинів та його використання
Випадковий патент: Кумулятивний перфоратор