Спосіб керування орієнтацією вітрового генератора та вітровий генератор

Формула / Реферат
1. Спосіб керування орієнтацією вітрового генератора, який містить встановлену на нерухомій вежі з можливістю обертання навколо вертикальної осі гондолу з розміщеним у ній горизонтальним обертовим валом ротора, ротор турбіни, утворений принаймні двома встановленими на валу лопатями, які перетворюють кінетичну енергію вітру на енергію обертання вала ротора, з яким механічно зв'язаний електрогенератор, згідно з яким за допомогою контролера орієнтації обробляють сигнал, залежний від відхилення осі вала ротора від напрямку на вітер, і формують керуючий сигнал зворотного зв'язку, який подають на актуатор орієнтації до досягнення усунення вказаного відхилення, який відрізняється тим, що на актуатор орієнтації подають керуючий сигнал, який формують за часовою різницею між моментами часу перебування лопатей у нижньому вертикальному положенні, які визначають за опорним сигналом давача, зв'язаного з валом ротора, і моментами часу перебування лопатей на лінії між напрямком вітру і вежею, які визначають за періодичним сигналом паразитної амплітудної модуляції генерованого електрогенератором електричного змінного струму, зумовленим аеродинамічною взаємодією між лопатями і вежею.
2. Спосіб за п. 1, який відрізняється тим, що моменти часу перебування лопатей у нижньому вертикальному положенні формують із векторного сигналу давача положення ротора, закріпленого на валу ротора у площині, перпендикулярній до осі ротора, із зміщенням відносно центра ротора, причому одну із осей чутливості давача орієнтують вздовж напряму осі лопаті, магнітного енкодера з магнітною шкалою у вигляді кільця або стрічки, закріпленою на валу ротора, фотооптичного імпульсного енкодера з прозорим диском-шкалою, закріпленим на валу ротора, безконтактного індуктивного давача наближення і зубчастого диска, закріпленого на валу ротора або системи для визначення положення лопаті ротора вітрового генератора шляхом бездротової передачі сигналу, що включає в себе передавач, змонтований на лопаті ротора вітрового генератора, приймач та обчислювальний пристрій для визначення положення лопаті.
3. Спосіб за п. 1, який відрізняється тим, що періодичний сигнал аеродинамічної взаємодії лопатей ротора і вежі виділяють шляхом виконання послідовності дій: формування обвідної генерованого електрогенератором електричного змінного струму шляхом амплітудної демодуляції сигналу струму в околі частоти мережі; оцінювання періоду і коефіцієнтів Фур'є періодичної складової отриманої обвідної; виокремлення основної гармоніки сигналу аеродинамічної взаємодії лопатей ротора і вежі.
4. Спосіб за п. 3, який відрізняється тим, що часову різницю визначають як різницю фаз між опорним сигналом давача положення ротора і основною гармонікою періодичного сигналу аеродинамічної взаємодії лопатей ротора і вежі.
5. Спосіб за п. 4, який відрізняється тим, що сигнал часової різниці перед подачею на модуль керування актуатором орієнтації обробляють фільтром нижніх частот.
6. Спосіб за п. 5, який відрізняється тим, що фільтрований сигнал часової різниці подають на вхід модуля керування актуатором орієнтації, який виконаний у вигляді Р-регулятора, РІ-регулятора, РID-регулятора, нейронно-мережевого регулятора, регулятора з нечіткою логікою, адаптивного фільтра Калмана або лукап-таблиці, і в якому формують керуючий сигнал для актуатора орієнтації.
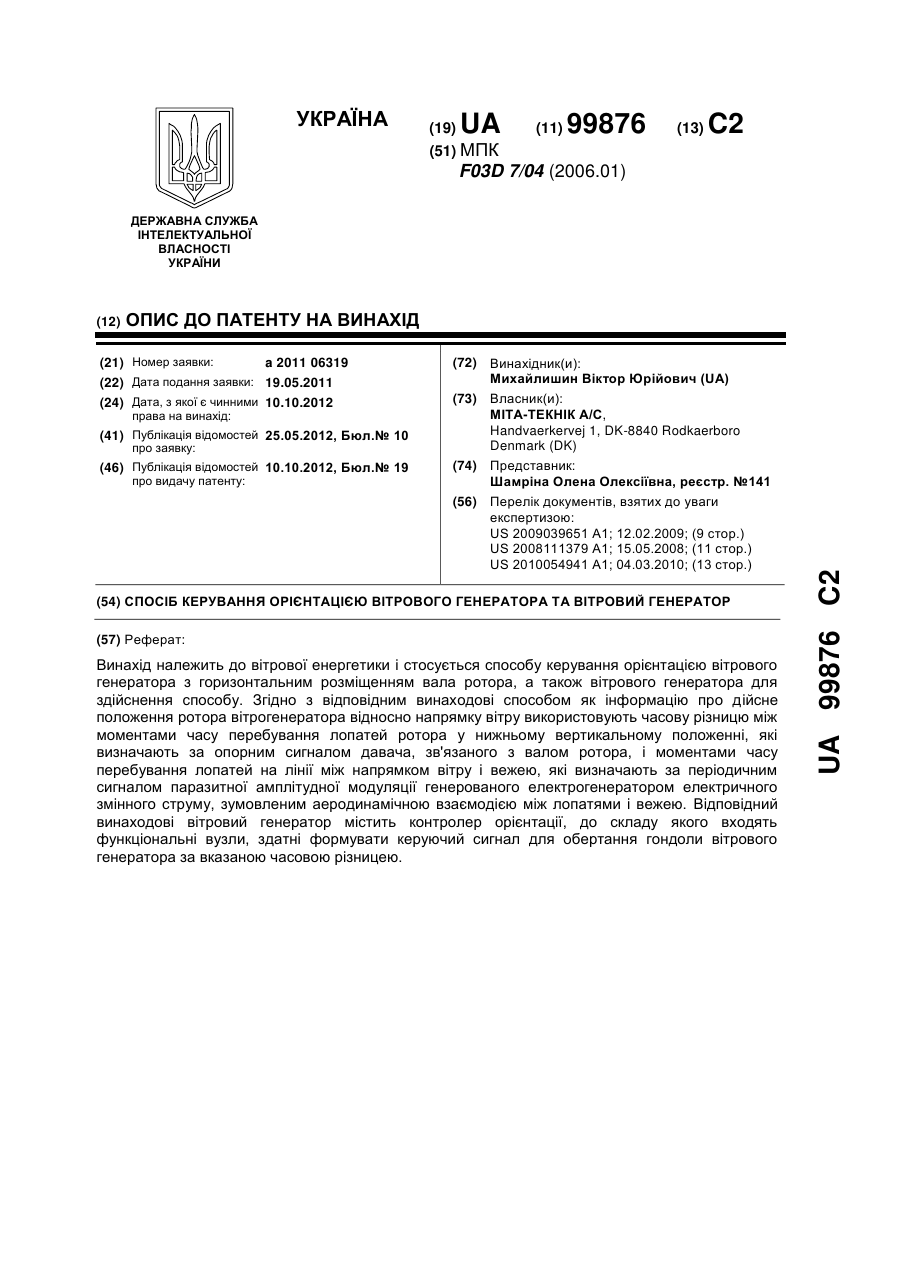
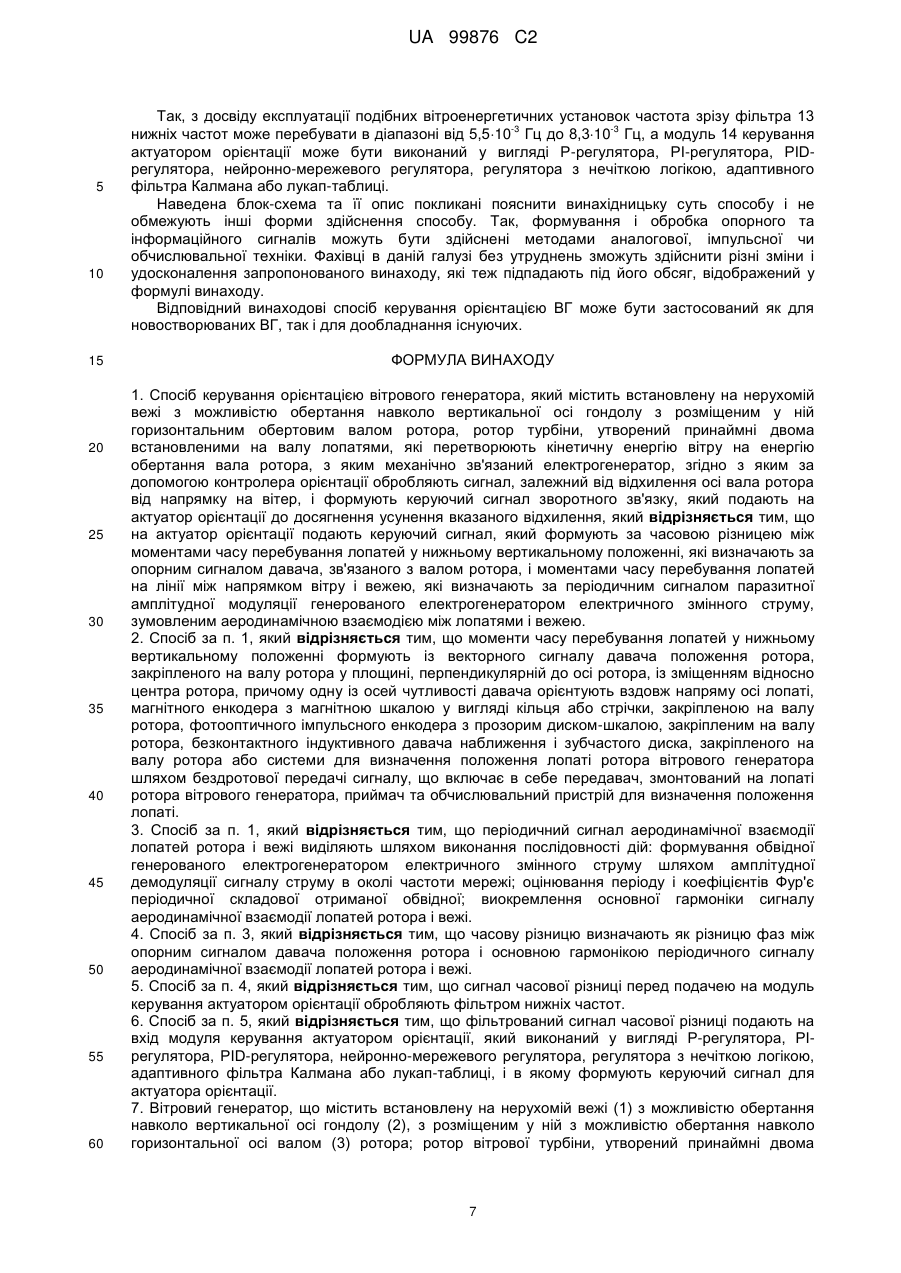
7. Вітровий генератор, що містить встановлену на нерухомій вежі (1) з можливістю обертання навколо вертикальної осі гондолу (2) з розміщеним у ній з можливістю обертання навколо горизонтальної осі валом (3) ротора; ротор вітрової турбіни, утворений принаймні двома встановленими на маточині вала лопатями (4), виконаними з можливістю перетворення кінетичної енергії вітру на енергію обертання вала ротора; механічно зв'язаний з валом (3) ротора електрогенератор (5); контролер (7) орієнтації, вихід якого з'єднаний з актуатором (8) орієнтації, який відрізняється тим, що містить зв'язаний з валом (3) ротора давач (6) опорного сигналу нижнього вертикального положення лопатей (4) ротора, а також тим, що з'єднаний з давачем (6) опорного сигналу і з електрогенератором (5) контролер (7) орієнтації виконаний зі здатністю формування керуючого сигналу за часовою різницею між моментами часу перебування лопатей у нижньому вертикальному положенні, і моментами часу перебування лопатей на лінії між напрямком вітру і вежею.
8. Вітровий генератор за п. 7, який відрізняється тим, що контролер (7) орієнтації містить функціональні вузли: формувач (11) обвідної сигналу генератора (5), з'єднаний з виходом формувача (11) фільтр (12) основної гармоніки періодичного сигналу аеродинамічної взаємодії лопатей (4) ротора і вежі (1), з'єднаний з давачем (6) модуль (9) обробки опорного сигналу, фазометр (10), з'єднаний з виходами модуля (9) обробки опорного сигналу і фільтра (12) основної гармоніки періодичного сигналу аеродинамічної взаємодії лопатей ротора і вежі, низькочастотний фільтр (13) сигналу часової різниці та з'єднаний з його виходом модуль (14) керування актуатором орієнтації у вигляді Р-регулятора, РІ-регулятора, PID-регулятора, нейронно-мережевого регулятора, регулятора з нечіткою логікою, адаптивного фільтра Калмана або лукап-таблиці, вихід якого з'єднаний з актуатором (8) орієнтації.
Текст
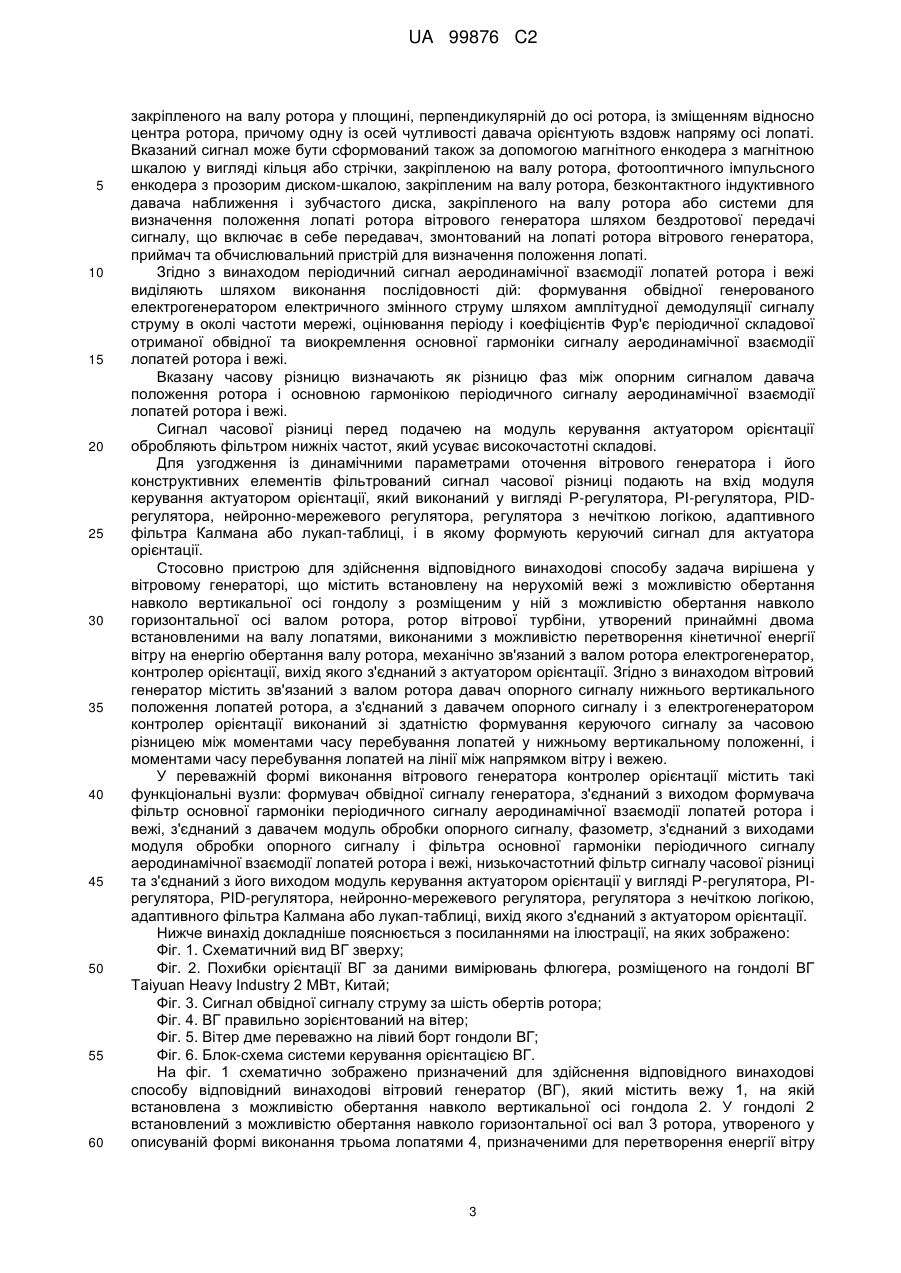
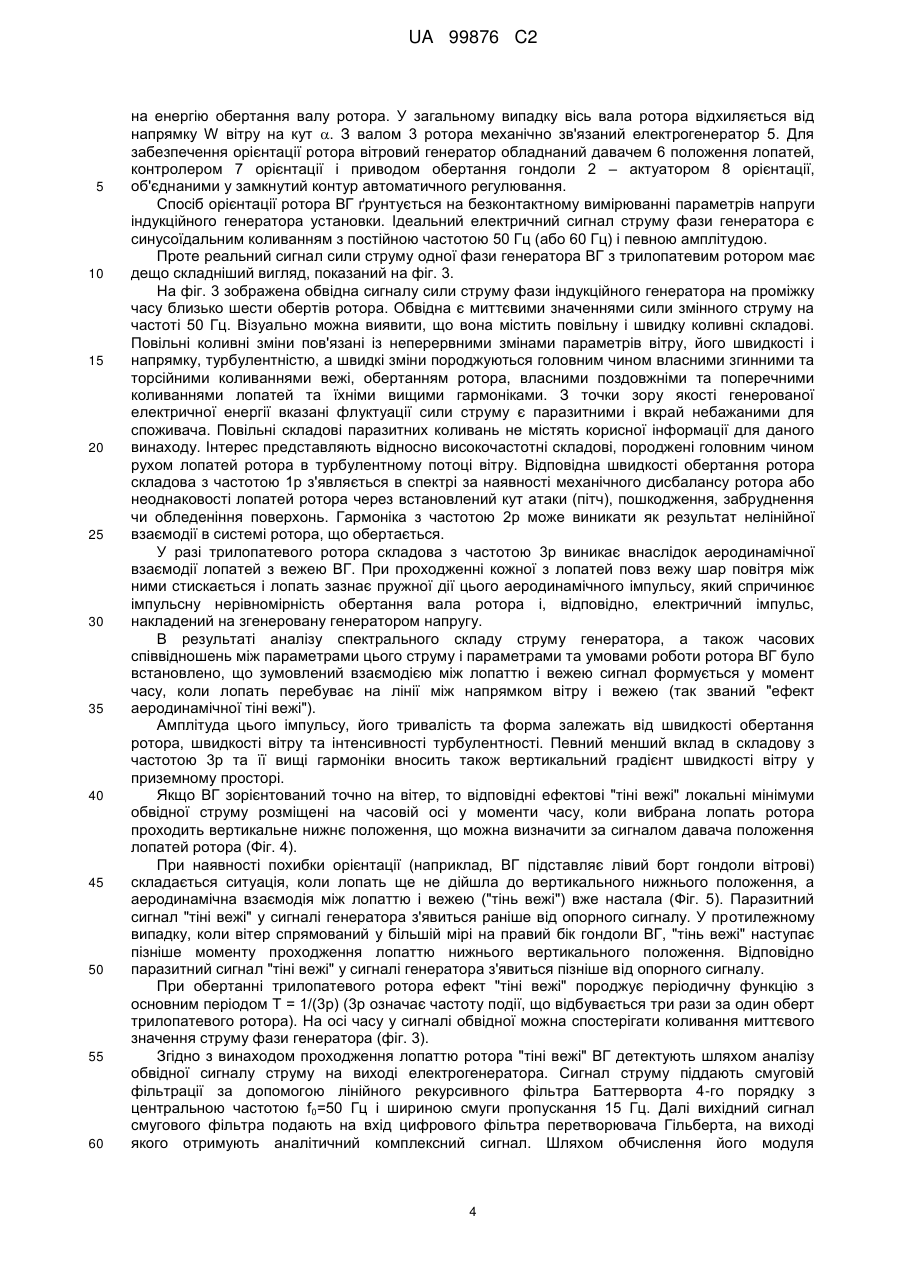
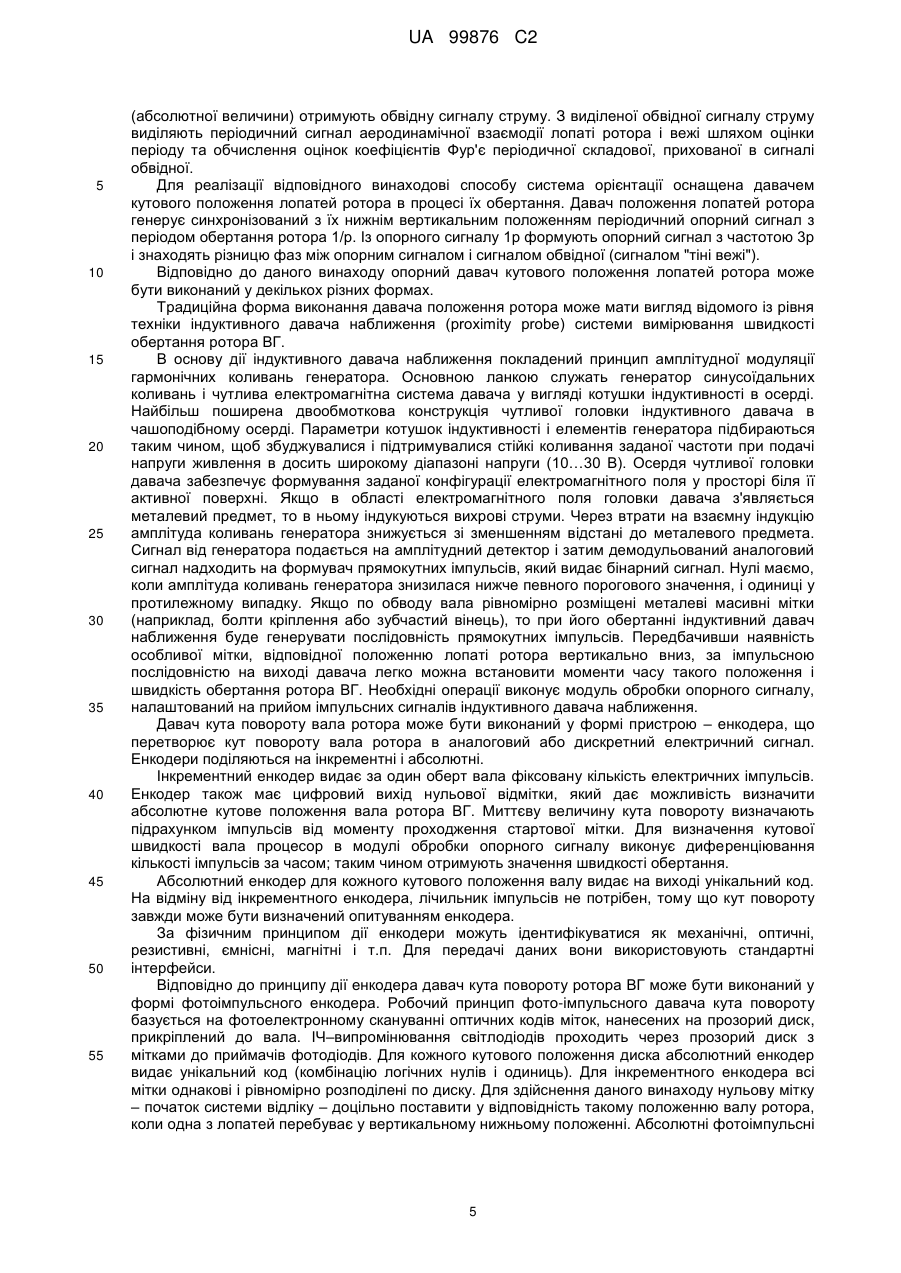
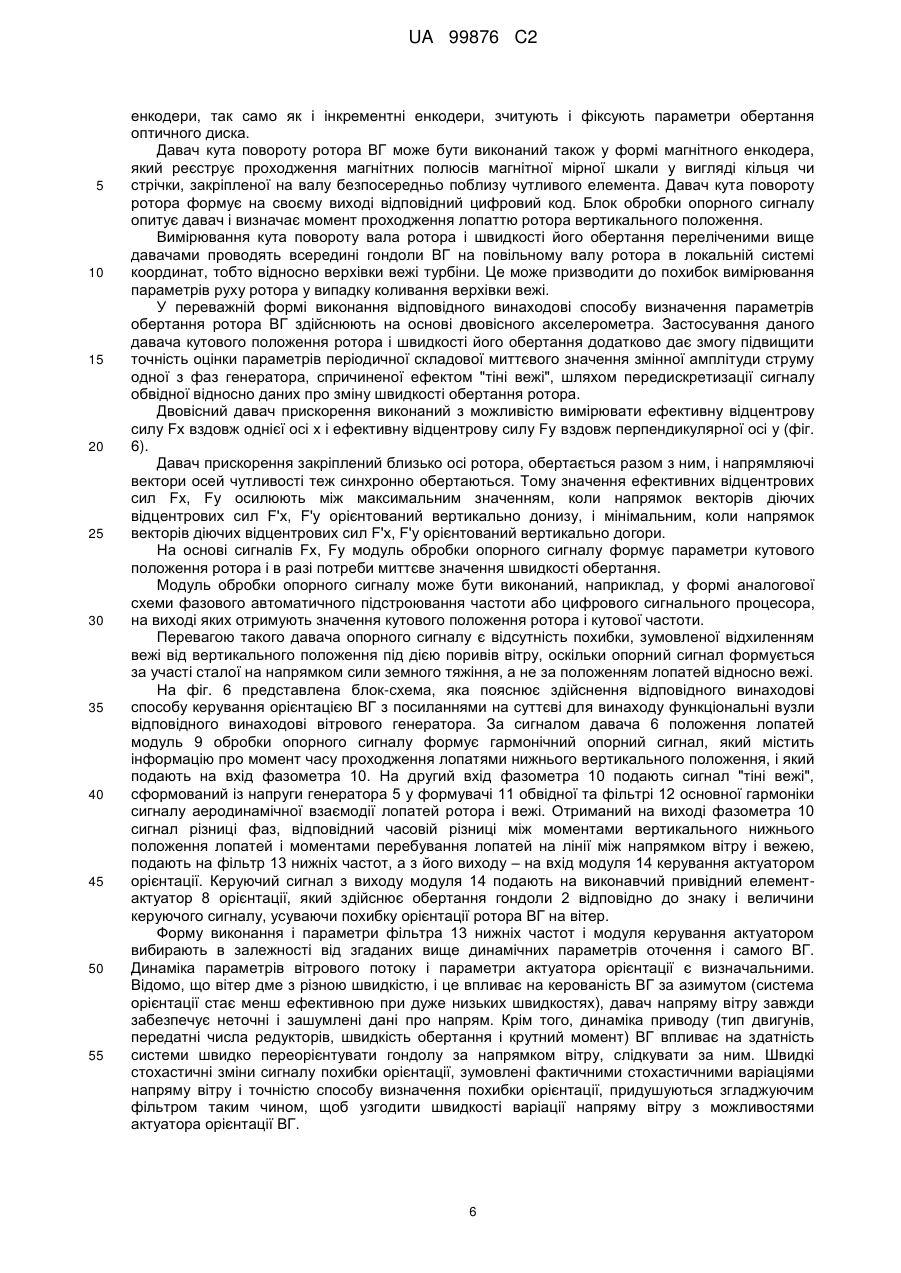
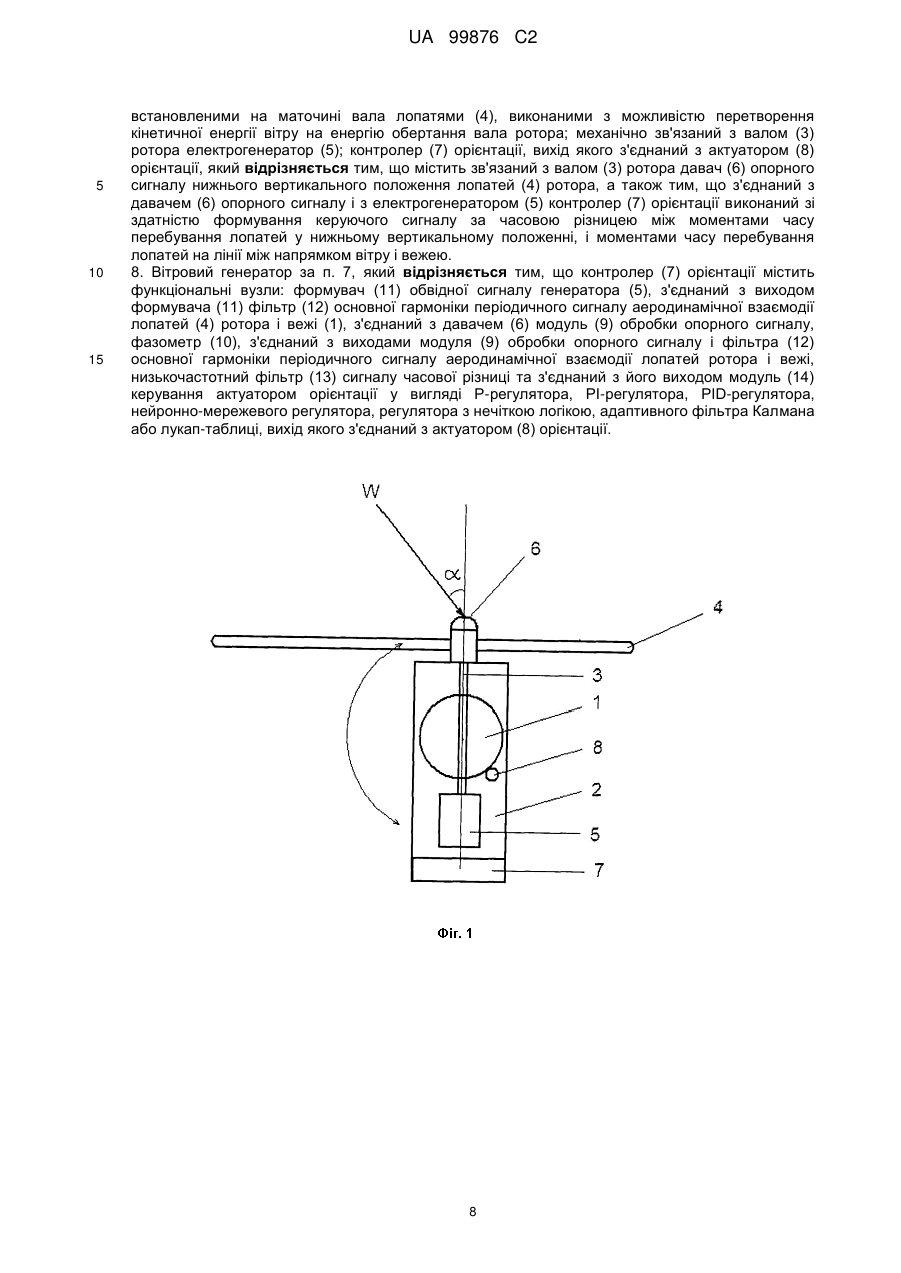
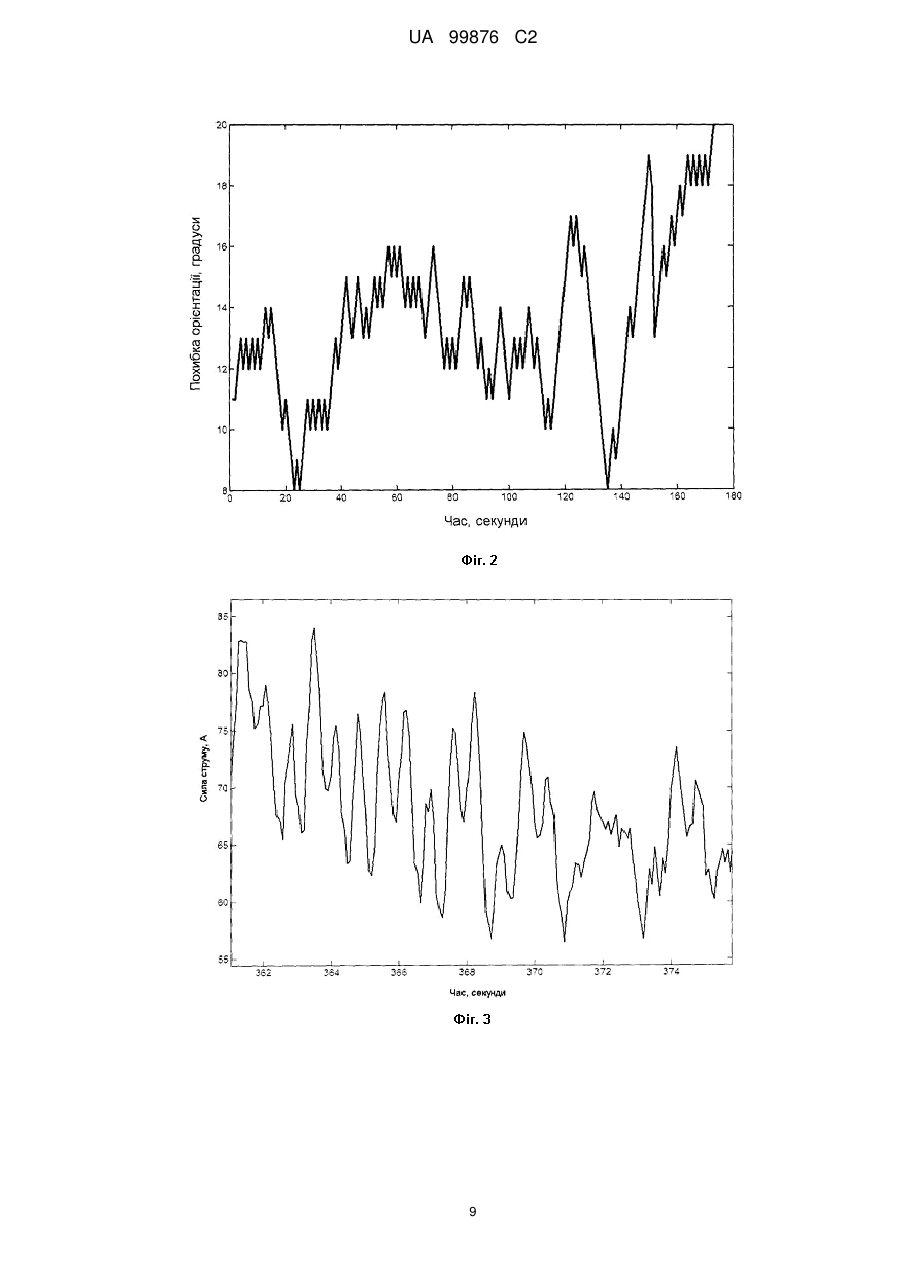
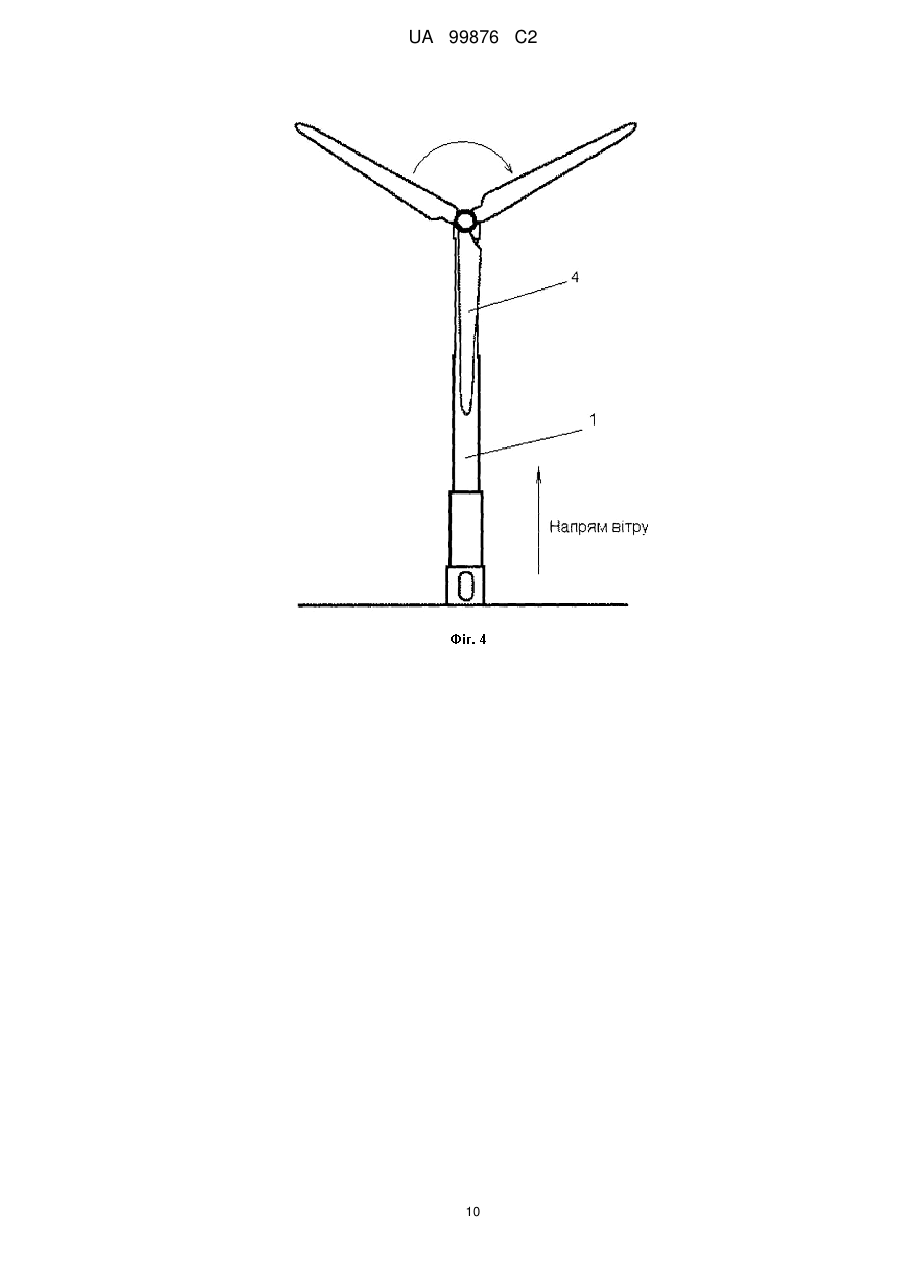
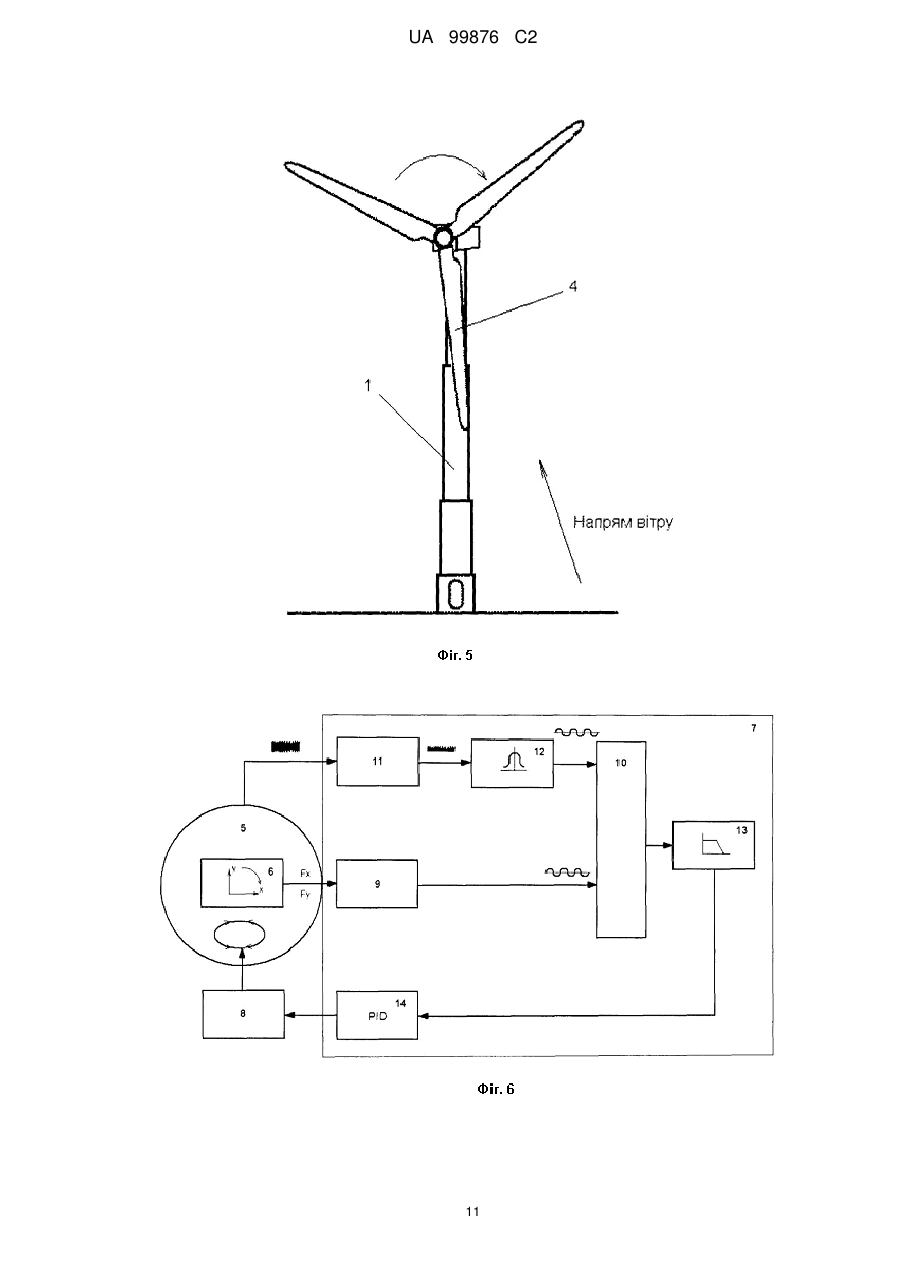
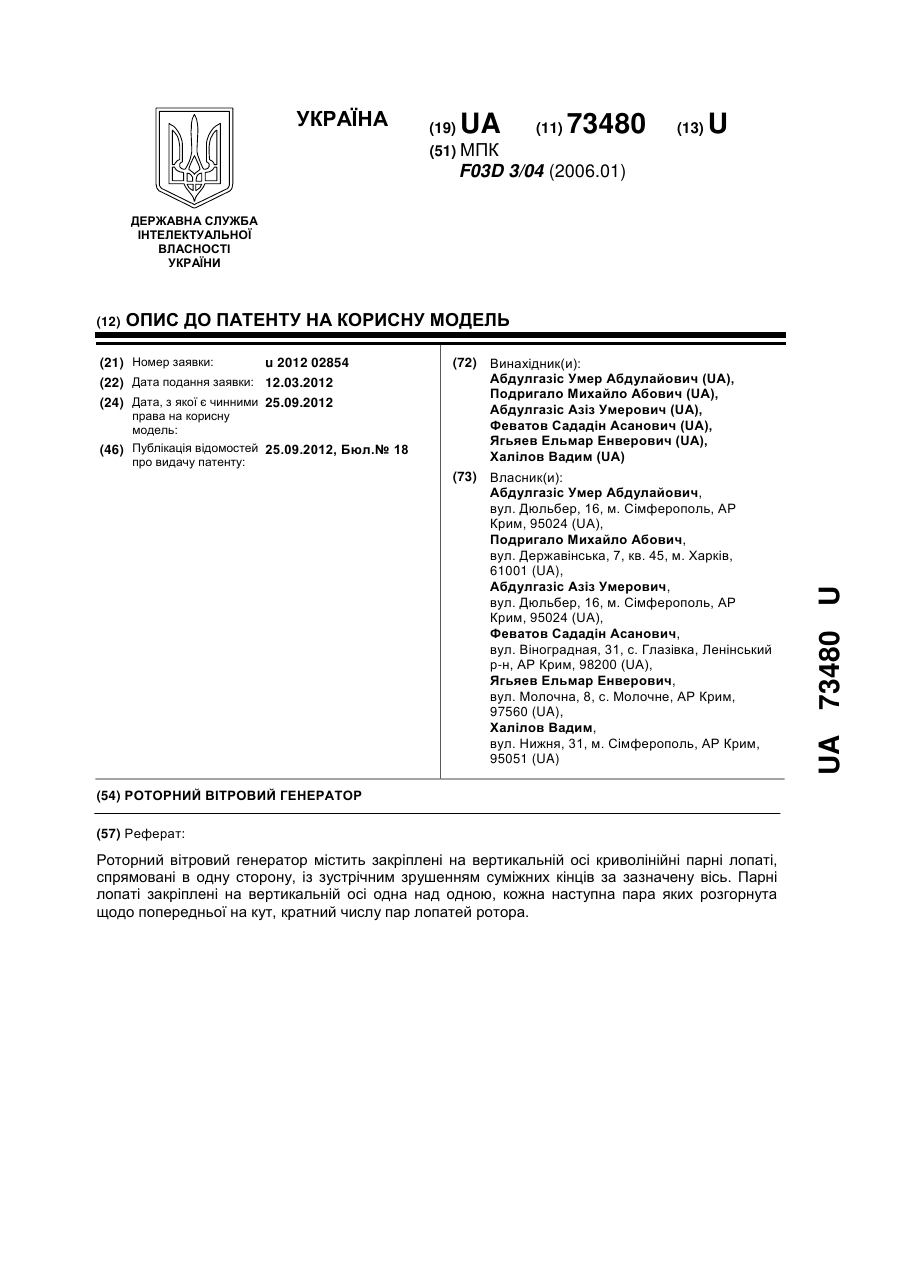
Реферат: Винахід належить до вітрової енергетики і стосується способу керування орієнтацією вітрового генератора з горизонтальним розміщенням вала ротора, а також вітрового генератора для здійснення способу. Згідно з відповідним винаходові способом як інформацію про дійсне положення ротора вітрогенератора відносно напрямку вітру використовують часову різницю між моментами часу перебування лопатей ротора у нижньому вертикальному положенні, які визначають за опорним сигналом давача, зв'язаного з валом ротора, і моментами часу перебування лопатей на лінії між напрямком вітру і вежею, які визначають за періодичним сигналом паразитної амплітудної модуляції генерованого електрогенератором електричного змінного струму, зумовленим аеродинамічною взаємодією між лопатями і вежею. Відповідний винаходові вітровий генератор містить контролер орієнтації, до складу якого входять функціональні вузли, здатні формувати керуючий сигнал для обертання гондоли вітрового генератора за вказаною часовою різницею. UA 99876 C2 (12) UA 99876 C2 UA 99876 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до вітрової енергетики і стосується способу керування орієнтацією вітрового генератора з горизонтальним розміщенням вала ротора, а також вітрового генератора для здійснення способу. Серед найперспективніших напрямків використання відновлюваних ресурсів енергії вітрова енергетика розвивається найбільш динамічно, і вже стала конкурентоздатним гравцем на ринку виробництва електроенергії. Переважна більшість сучасних вітрових генераторів (ВГ) мають трилопатевий ротор з горизонтально розміщеним валом. Такі турбіни потребують певного механізму орієнтації ротора на вітер і відповідного контролера орієнтації. Похибка орієнтації визначається як кут між фактичним напрямом осі ротора і напрямом вітру. Щоб добути максимум ефективності перетворення кінетичної енергії вітру, кутова похибка орієнтації ВГ має бути рівна нулю. В процесі орієнтації гондолу ВГ обертають навколо вертикальної осі з метою мінімізувати похибку орієнтації. Зазвичай вісь вежі ВГ збігається з віссю обертання гондоли. Фізично процес орієнтації здійснюють електричні або гідравлічні приводи орієнтації ВГ. Згідно з рівнем техніки система керування орієнтацією типового сучасного ВГ ґрунтується на прямому вимірюванні напряму вітру одним або декількома електромеханічними (аналоговими) або оптичними (дискретними) давачами напряму – флюгерами анемометрів, розміщеними на гондолі ВГ у її кормовій частині. Недосконалість звичайних електромеханічних і оптичних давачів – флюгерів анемометрів, їх розташування на гондолі за ротором турбіни, необхідність калібрування при введенні в дію ВГ призводить до того, що пересічний вітровий генератор практично майже зажди неточно зорієнтований на вітер. Точність вимірювання напряму вітру за допомогою флюгерів анемометрів, розміщених на гондолі ВГ за збуреним ротором вихровим турбулентним повітряним потоком, у більшості випадків є незадовільною. Похибка вимірювання є функцією швидкості вітру, інтенсивності турбулентності, напрямку вітру та інших параметрів вітрового потоку, що проходить через ротор ВГ, та аеродинамічних характеристик ротора. Для електромеханічних флюгерів анемометрів ВГ, встановлених на гондолі за ротором, звичними є похибки орієнтації через невластиві оцінки напряму вітру в межах ±15°. При цьому стандартна девіація похибки оцінюється в 5°. В патентній заявці US 2009/0039651 А1 "Method for wind turbine yaw control", опубл. 04.04.2010, відзначається, що для електромеханічного флюгера анемометра, розміщеного в кормовій частині гондоли, досягти невизначеності у значенні напряму вітру ±5° є дуже складно, при врахуванні всіх джерел невизначеності вимірювання. Потреби сучасної індустрії вітрової енергетики стимулюють наукові розробки у напрямку вимірювання параметрів вітру на основі ультразвукових технологій (див. T.F. Pedersen, N.S. Sorensen, Luca Vita, Peder Enevoldsen, Optimization of Wind Turbine Operation by Use of Spinner Anemometer ris – r – 1654). Експериментальні дослідження втрат потужності ВГ (Pedersen TF, "On Wind Turbine Power Performance Measurements at Inclined Airflow", WIND ENERGY 2004; 7:163-176) показують, що потужність на виході ВГ зменшується за функцією "квадрат косинуса" кута похибки орієнтації. На практиці це означає зменшення потужності на 1 %, 3 %, 7 % та 22 % для систематичної середньої похибки орієнтації 5°, 10°, 15° та 20°, відповідно. Для ВГ потужністю 3,6 МВт похибка орієнтації, виміряна ультразвуковим вітроміром на обтічнику ротора, становить близько 10°. Це означає, що при оптимізації процесу орієнтації можна досягнути суттєвого приросту потужності і відповідно виробленої енергії. Якщо припустити існування похибки орієнтації ВГ із середнім значенням 8° та стандартним відхиленням 2°, то втрати потужності у порівнянні з правильною орієнтацією ротора ВГ становитимуть 3,8 %. Після корекції похибки орієнтації до середнього значення 0° із стандартною девіацією 2° втрати становитимуть 1,9 %. Таким чином, оптимізація похибки приведе до зростання вихідної потужності ВГ на 1,9 %. При малих та помірних швидкостях вітру похибка орієнтації має більше розсіяння, а вихідна потужність є чутливою до похибки орієнтації. Різкі зміни напряму вітру, характерні для цих умов, спричиняють варіації вихідної потужності ВГ і появу додаткових динамічних навантажень у механічному приводі. Звісно вони є небажаним явищем, бо можуть спричинити суттєве скорочення втомної довговічності конструкції і компонентів механічного приводу ВГ (Заявка на патент США 20080111379, опубл. 15.05.2008 "Wind Turbine and Method for the Automatic Correction of Wind" Vane Settings Altemark, J.) Порівняння орієнтації, отриманої за допомогою флюгера, з показами ультразвукового вітроміра на обтічнику ротора виявляє похибку орієнтації за допомогою флюгера близько 20 %. 1 UA 99876 C2 5 10 15 20 25 30 35 40 45 50 55 60 Лазерні прилади на базі ефекту Допплера теж починають впроваджувати в індустрію вітрової енергетики. Наприклад, лазерний вітровий сенсор (ЛВС) типу Vindicator® останнього покоління (http://www.catchthewindinc.com/products/vindicator-turbine-control) розміщують на гондолі ВГ. З цього положення сенсор дає змогу визначати швидкість і напрям незбуреного потоку вітру перед ротором турбіни на віддалі до 300 м. В результаті система керування ВГ отримує більш достовірні дані про вітрові умови, що дозволяє оптимізувати ефективність ВГ. Звичайно, нові розробки дають змогу вимірювати параметри вітрового потоку з більшою точністю у порівнянні із традиційними вітромірами ВГ. Так, ультразвуковий анемометр, встановлений на обтічнику ротора, сприймає вже незбурений потік вітру, що безпосередньо падає на ротор. Проте залишається непереборною локальність такого вимірювання. Лазерні вітрові сенсори теж мають суттєві переваги над існуючими системами вимірювання параметрів вітру. Однак вони ще знаходяться у стадії науково-дослідних конструкторських розробок. Масове використання таких пристроїв наразі і в найближчому майбутньому є малоймовірним, оскільки переоснащення парків на основі запропонованих нових технологічних рішень веде до значних витрат коштів. Інтеграція лазерних вітрових сенсорів може потребувати також і суттєвих змін існуючого програмного забезпечення керуючих контролерів ВГ. Тим часом реальні дані вимірювання похибки орієнтації керуючим контролером ВГ потужністю 2 МВт часто мають вигляд, показаний на фіг. 2. Це дані заявника з вітрового генератора, встановленого в Китаї. Протягом майже 3 хвилин ВГ перебуває в неоптимальному положенні з середньою похибкою орієнтації близько 13,5° і стандартним відхиленням 2,6°. Звичайно, у подібних випадках необхідна оптимізація системи орієнтації, яка без значних додаткових фінансових витрат дасть суттєвий приріст виробленої електроенергії. Найближчою за технічною суттю до заявленого винаходу є публікація US 20100054941 від 04.03.2010 ("Wind tracking system of a wind turbine"), в якій розкрита система орієнтації ВГ, робота якої базується на додатковому давачі, що сприймає торсійний момент гондоли ВГ або згинальний момент, якого зазнає вал ротора при відхиленнях від точного напрямку на вітер. Сучасні контактні давачі торсійного або згинального моменту на основі тензорезисторів дають можливість з належною точністю виміряти необхідну механічну величину та отримати її у вигляді електричного сигналу як у аналоговому, так і цифровому вигляді. Однак складність практичної реалізації такого винаходу можна буде відчути і зрозуміти при дообладнанні діючих ВГ в робочих умовах. Для проведення таких робіт необхідно зупиняти ВГ, умови роботи при встановленні додаткових тензометричних давачів дуже відрізняються від заводських при складанні ВГ, безпосередній доступ до місць встановлення давача може бути просто неможливий. Для дообладнання ВГ ймовірно потрібно отримати дозвіл виробника турбіни та страхової компанії. Тензометричні давачі потребують періодичної повірки, а їх тривале перебування в суворих умовах може відбитись на ефективності функціонування і точності такої слідкуючої системи. Тому задачею винаходу є створення способу керування орієнтацією вітрового генератора і пристрою для здійснення способу, які шляхом використання в роботі системи орієнтації складових генерованого змінного струму, що однозначно вказують на наявність відхилення від напрямку на вітер, забезпечують збільшення енергоефективності ВГ завдяки підвищенню точності орієнтації валу ротора на вітер. Стосовно способу задача вирішена у способі керування орієнтацією вітрового генератора, який містить встановлену на нерухомій вежі з можливістю обертання навколо вертикальної осі гондолу з розміщеним у ній горизонтальним обертовим валом ротора, ротор турбіни, утворений принаймні двома встановленими у валу лопатями, які перетворюють кінетичну енергії вітру на енергію обертання валу ротора, з яким механічно зв'язаний електрогенератор, згідно з яким за допомогою контролера орієнтації обробляють сигнал, залежний від відхилення осі валу ротора від напрямку на вітер, і формують керуючий сигнал зворотного зв'язку, який подають на актуатор орієнтації до досягнення усунення вказаного відхилення. Згідно з винаходом на актуатор орієнтації подають керуючий сигнал, який формують за часовою різницею між моментами часу перебування лопатей у нижньому вертикальному положенні, які визначають за опорним сигналом давача, зв'язаного з валом ротора, і моментами часу перебування лопатей на лінії між напрямком вітру і вежею, які визначають за періодичним сигналом паразитної амплітудної модуляції генерованого електрогенератором електричного змінного струму, зумовленим аеродинамічною взаємодією між лопатями і вежею. У переважній формі виконання моменти часу перебування лопатей у нижньому вертикальному положенні формують із векторного сигналу давача положення ротора, 2 UA 99876 C2 5 10 15 20 25 30 35 40 45 50 55 60 закріпленого на валу ротора у площині, перпендикулярній до осі ротора, із зміщенням відносно центра ротора, причому одну із осей чутливості давача орієнтують вздовж напряму осі лопаті. Вказаний сигнал може бути сформований також за допомогою магнітного енкодера з магнітною шкалою у вигляді кільця або стрічки, закріпленою на валу ротора, фотооптичного імпульсного енкодера з прозорим диском-шкалою, закріпленим на валу ротора, безконтактного індуктивного давача наближення і зубчастого диска, закріпленого на валу ротора або системи для визначення положення лопаті ротора вітрового генератора шляхом бездротової передачі сигналу, що включає в себе передавач, змонтований на лопаті ротора вітрового генератора, приймач та обчислювальний пристрій для визначення положення лопаті. Згідно з винаходом періодичний сигнал аеродинамічної взаємодії лопатей ротора і вежі виділяють шляхом виконання послідовності дій: формування обвідної генерованого електрогенератором електричного змінного струму шляхом амплітудної демодуляції сигналу струму в околі частоти мережі, оцінювання періоду і коефіцієнтів Фур'є періодичної складової отриманої обвідної та виокремлення основної гармоніки сигналу аеродинамічної взаємодії лопатей ротора і вежі. Вказану часову різницю визначають як різницю фаз між опорним сигналом давача положення ротора і основною гармонікою періодичного сигналу аеродинамічної взаємодії лопатей ротора і вежі. Сигнал часової різниці перед подачею на модуль керування актуатором орієнтації обробляють фільтром нижніх частот, який усуває високочастотні складові. Для узгодження із динамічними параметрами оточення вітрового генератора і його конструктивних елементів фільтрований сигнал часової різниці подають на вхід модуля керування актуатором орієнтації, який виконаний у вигляді Р-регулятора, РІ-регулятора, PIDрегулятора, нейронно-мережевого регулятора, регулятора з нечіткою логікою, адаптивного фільтра Калмана або лукап-таблиці, і в якому формують керуючий сигнал для актуатора орієнтації. Стосовно пристрою для здійснення відповідного винаходові способу задача вирішена у вітровому генераторі, що містить встановлену на нерухомій вежі з можливістю обертання навколо вертикальної осі гондолу з розміщеним у ній з можливістю обертання навколо горизонтальної осі валом ротора, ротор вітрової турбіни, утворений принаймні двома встановленими на валу лопатями, виконаними з можливістю перетворення кінетичної енергії вітру на енергію обертання валу ротора, механічно зв'язаний з валом ротора електрогенератор, контролер орієнтації, вихід якого з'єднаний з актуатором орієнтації. Згідно з винаходом вітровий генератор містить зв'язаний з валом ротора давач опорного сигналу нижнього вертикального положення лопатей ротора, а з'єднаний з давачем опорного сигналу і з електрогенератором контролер орієнтації виконаний зі здатністю формування керуючого сигналу за часовою різницею між моментами часу перебування лопатей у нижньому вертикальному положенні, і моментами часу перебування лопатей на лінії між напрямком вітру і вежею. У переважній формі виконання вітрового генератора контролер орієнтації містить такі функціональні вузли: формувач обвідної сигналу генератора, з'єднаний з виходом формувача фільтр основної гармоніки періодичного сигналу аеродинамічної взаємодії лопатей ротора і вежі, з'єднаний з давачем модуль обробки опорного сигналу, фазометр, з'єднаний з виходами модуля обробки опорного сигналу і фільтра основної гармоніки періодичного сигналу аеродинамічної взаємодії лопатей ротора і вежі, низькочастотний фільтр сигналу часової різниці та з'єднаний з його виходом модуль керування актуатором орієнтації у вигляді Р-регулятора, РІрегулятора, PID-регулятора, нейронно-мережевого регулятора, регулятора з нечіткою логікою, адаптивного фільтра Калмана або лукап-таблиці, вихід якого з'єднаний з актуатором орієнтації. Нижче винахід докладніше пояснюється з посиланнями на ілюстрації, на яких зображено: Фіг. 1. Схематичний вид ВГ зверху; Фіг. 2. Похибки орієнтації ВГ за даними вимірювань флюгера, розміщеного на гондолі ВГ Taiyuan Heavy Industry 2 МВт, Китай; Фіг. 3. Сигнал обвідної сигналу струму за шість обертів ротора; Фіг. 4. ВГ правильно зорієнтований на вітер; Фіг. 5. Вітер дме переважно на лівий борт гондоли ВГ; Фіг. 6. Блок-схема системи керування орієнтацією ВГ. На фіг. 1 схематично зображено призначений для здійснення відповідного винаходові способу відповідний винаходові вітровий генератор (ВГ), який містить вежу 1, на якій встановлена з можливістю обертання навколо вертикальної осі гондола 2. У гондолі 2 встановлений з можливістю обертання навколо горизонтальної осі вал 3 ротора, утвореного у описуваній формі виконання трьома лопатями 4, призначеними для перетворення енергії вітру 3 UA 99876 C2 5 10 15 20 25 30 35 40 45 50 55 60 на енергію обертання валу ротора. У загальному випадку вісь вала ротора відхиляється від напрямку W вітру на кут . З валом 3 ротора механічно зв'язаний електрогенератор 5. Для забезпечення орієнтації ротора вітровий генератор обладнаний давачем 6 положення лопатей, контролером 7 орієнтації і приводом обертання гондоли 2 – актуатором 8 орієнтації, об'єднаними у замкнутий контур автоматичного регулювання. Спосіб орієнтації ротора ВГ ґрунтується на безконтактному вимірюванні параметрів напруги індукційного генератора установки. Ідеальний електричний сигнал струму фази генератора є синусоїдальним коливанням з постійною частотою 50 Гц (або 60 Гц) і певною амплітудою. Проте реальний сигнал сили струму одної фази генератора ВГ з трилопатевим ротором має дещо складніший вигляд, показаний на фіг. 3. На фіг. 3 зображена обвідна сигналу сили струму фази індукційного генератора на проміжку часу близько шести обертів ротора. Обвідна є миттєвими значеннями сили змінного струму на частоті 50 Гц. Візуально можна виявити, що вона містить повільну і швидку коливні складові. Повільні коливні зміни пов'язані із неперервними змінами параметрів вітру, його швидкості і напрямку, турбулентністю, а швидкі зміни породжуються головним чином власними згинними та торсійними коливаннями вежі, обертанням ротора, власними поздовжніми та поперечними коливаннями лопатей та їхніми вищими гармоніками. З точки зору якості генерованої електричної енергії вказані флуктуації сили струму є паразитними і вкрай небажаними для споживача. Повільні складові паразитних коливань не містять корисної інформації для даного винаходу. Інтерес представляють відносно високочастотні складові, породжені головним чином рухом лопатей ротора в турбулентному потоці вітру. Відповідна швидкості обертання ротора складова з частотою 1р з'являється в спектрі за наявності механічного дисбалансу ротора або неоднаковості лопатей ротора через встановлений кут атаки (пітч), пошкодження, забруднення чи обледеніння поверхонь. Гармоніка з частотою 2р може виникати як результат нелінійної взаємодії в системі ротора, що обертається. У разі трилопатевого ротора складова з частотою 3р виникає внаслідок аеродинамічної взаємодії лопатей з вежею ВГ. При проходженні кожної з лопатей повз вежу шар повітря між ними стискається і лопать зазнає пружної дії цього аеродинамічного імпульсу, який спричинює імпульсну нерівномірність обертання вала ротора і, відповідно, електричний імпульс, накладений на згенеровану генератором напругу. В результаті аналізу спектрального складу струму генератора, а також часових співвідношень між параметрами цього струму і параметрами та умовами роботи ротора ВГ було встановлено, що зумовлений взаємодією між лопаттю і вежею сигнал формується у момент часу, коли лопать перебуває на лінії між напрямком вітру і вежею (так званий "ефект аеродинамічної тіні вежі"). Амплітуда цього імпульсу, його тривалість та форма залежать від швидкості обертання ротора, швидкості вітру та інтенсивності турбулентності. Певний менший вклад в складову з частотою 3р та її вищі гармоніки вносить також вертикальний градієнт швидкості вітру у приземному просторі. Якщо ВГ зорієнтований точно на вітер, то відповідні ефектові "тіні вежі" локальні мінімуми обвідної струму розміщені на часовій осі у моменти часу, коли вибрана лопать ротора проходить вертикальне нижнє положення, що можна визначити за сигналом давача положення лопатей ротора (Фіг. 4). При наявності похибки орієнтації (наприклад, ВГ підставляє лівий борт гондоли вітрові) складається ситуація, коли лопать ще не дійшла до вертикального нижнього положення, а аеродинамічна взаємодія між лопаттю і вежею ("тінь вежі") вже настала (Фіг. 5). Паразитний сигнал "тіні вежі" у сигналі генератора з'явиться раніше від опорного сигналу. У протилежному випадку, коли вітер спрямований у більшій мірі на правий бік гондоли ВГ, "тінь вежі" наступає пізніше моменту проходження лопаттю нижнього вертикального положення. Відповідно паразитний сигнал "тіні вежі" у сигналі генератора з'явиться пізніше від опорного сигналу. При обертанні трилопатевого ротора ефект "тіні вежі" породжує періодичну функцію з основним періодом Т = 1/(3р) (3р означає частоту події, що відбувається три рази за один оберт трилопатевого ротора). На осі часу у сигналі обвідної можна спостерігати коливання миттєвого значення струму фази генератора (фіг. 3). Згідно з винаходом проходження лопаттю ротора "тіні вежі" ВГ детектують шляхом аналізу обвідної сигналу струму на виході електрогенератора. Сигнал струму піддають смуговій фільтрації за допомогою лінійного рекурсивного фільтра Баттерворта 4-го порядку з центральною частотою f0=50 Гц і шириною смуги пропускання 15 Гц. Далі вихідний сигнал смугового фільтра подають на вхід цифрового фільтра перетворювача Гільберта, на виході якого отримують аналітичний комплексний сигнал. Шляхом обчислення його модуля 4 UA 99876 C2 5 10 15 20 25 30 35 40 45 50 55 (абсолютної величини) отримують обвідну сигналу струму. З виділеної обвідної сигналу струму виділяють періодичний сигнал аеродинамічної взаємодії лопаті ротора і вежі шляхом оцінки періоду та обчислення оцінок коефіцієнтів Фур'є періодичної складової, прихованої в сигналі обвідної. Для реалізації відповідного винаходові способу система орієнтації оснащена давачем кутового положення лопатей ротора в процесі їх обертання. Давач положення лопатей ротора генерує синхронізований з їх нижнім вертикальним положенням періодичний опорний сигнал з періодом обертання ротора 1/р. Із опорного сигналу 1р формують опорний сигнал з частотою 3р і знаходять різницю фаз між опорним сигналом і сигналом обвідної (сигналом "тіні вежі"). Відповідно до даного винаходу опорний давач кутового положення лопатей ротора може бути виконаний у декількох різних формах. Традиційна форма виконання давача положення ротора може мати вигляд відомого із рівня техніки індуктивного давача наближення (proximity probe) системи вимірювання швидкості обертання ротора ВГ. В основу дії індуктивного давача наближення покладений принцип амплітудної модуляції гармонічних коливань генератора. Основною ланкою служать генератор синусоїдальних коливань і чутлива електромагнітна система давача у вигляді котушки індуктивності в осерді. Найбільш поширена двообмоткова конструкція чутливої головки індуктивного давача в чашоподібному осерді. Параметри котушок індуктивності і елементів генератора підбираються таким чином, щоб збуджувалися і підтримувалися стійкі коливання заданої частоти при подачі напруги живлення в досить широкому діапазоні напруги (10…30 В). Осердя чутливої головки давача забезпечує формування заданої конфігурації електромагнітного поля у просторі біля її активної поверхні. Якщо в області електромагнітного поля головки давача з'являється металевий предмет, то в ньому індукуються вихрові струми. Через втрати на взаємну індукцію амплітуда коливань генератора знижується зі зменшенням відстані до металевого предмета. Сигнал від генератора подається на амплітудний детектор і затим демодульований аналоговий сигнал надходить на формувач прямокутних імпульсів, який видає бінарний сигнал. Нулі маємо, коли амплітуда коливань генератора знизилася нижче певного порогового значення, і одиниці у протилежному випадку. Якщо по обводу вала рівномірно розміщені металеві масивні мітки (наприклад, болти кріплення або зубчастий вінець), то при його обертанні індуктивний давач наближення буде генерувати послідовність прямокутних імпульсів. Передбачивши наявність особливої мітки, відповідної положенню лопаті ротора вертикально вниз, за імпульсною послідовністю на виході давача легко можна встановити моменти часу такого положення і швидкість обертання ротора ВГ. Необхідні операції виконує модуль обробки опорного сигналу, налаштований на прийом імпульсних сигналів індуктивного давача наближення. Давач кута повороту вала ротора може бути виконаний у формі пристрою – енкодера, що перетворює кут повороту вала ротора в аналоговий або дискретний електричний сигнал. Енкодери поділяються на інкрементні і абсолютні. Інкрементний енкодер видає за один оберт вала фіксовану кількість електричних імпульсів. Енкодер також має цифровий вихід нульової відмітки, який дає можливість визначити абсолютне кутове положення вала ротора ВГ. Миттєву величину кута повороту визначають підрахунком імпульсів від моменту проходження стартової мітки. Для визначення кутової швидкості вала процесор в модулі обробки опорного сигналу виконує диференціювання кількості імпульсів за часом; таким чином отримують значення швидкості обертання. Абсолютний енкодер для кожного кутового положення валу видає на виході унікальний код. На відміну від інкрементного енкодера, лічильник імпульсів не потрібен, тому що кут повороту завжди може бути визначений опитуванням енкодера. За фізичним принципом дії енкодери можуть ідентифікуватися як механічні, оптичні, резистивні, ємнісні, магнітні і т.п. Для передачі даних вони використовують стандартні інтерфейси. Відповідно до принципу дії енкодера давач кута повороту ротора ВГ може бути виконаний у формі фотоімпульсного енкодера. Робочий принцип фото-імпульсного давача кута повороту базується на фотоелектронному скануванні оптичних кодів міток, нанесених на прозорий диск, прикріплений до вала. ІЧ–випромінювання світлодіодів проходить через прозорий диск з мітками до приймачів фотодіодів. Для кожного кутового положення диска абсолютний енкодер видає унікальний код (комбінацію логічних нулів і одиниць). Для інкрементного енкодера всі мітки однакові і рівномірно розподілені по диску. Для здійснення даного винаходу нульову мітку – початок системи відліку – доцільно поставити у відповідність такому положенню валу ротора, коли одна з лопатей перебуває у вертикальному нижньому положенні. Абсолютні фотоімпульсні 5 UA 99876 C2 5 10 15 20 25 30 35 40 45 50 55 енкодери, так само як і інкрементні енкодери, зчитують і фіксують параметри обертання оптичного диска. Давач кута повороту ротора ВГ може бути виконаний також у формі магнітного енкодера, який реєструє проходження магнітних полюсів магнітної мірної шкали у вигляді кільця чи стрічки, закріпленої на валу безпосередньо поблизу чутливого елемента. Давач кута повороту ротора формує на своєму виході відповідний цифровий код. Блок обробки опорного сигналу опитує давач і визначає момент проходження лопаттю ротора вертикального положення. Вимірювання кута повороту вала ротора і швидкості його обертання переліченими вище давачами проводять всередині гондоли ВГ на повільному валу ротора в локальній системі координат, тобто відносно верхівки вежі турбіни. Це може призводити до похибок вимірювання параметрів руху ротора у випадку коливання верхівки вежі. У переважній формі виконання відповідного винаходові способу визначення параметрів обертання ротора ВГ здійснюють на основі двовісного акселерометра. Застосування даного давача кутового положення ротора і швидкості його обертання додатково дає змогу підвищити точність оцінки параметрів періодичної складової миттєвого значення змінної амплітуди струму одної з фаз генератора, спричиненої ефектом "тіні вежі", шляхом передискретизації сигналу обвідної відносно даних про зміну швидкості обертання ротора. Двовісний давач прискорення виконаний з можливістю вимірювати ефективну відцентрову силу Fx вздовж однієї осі х і ефективну відцентрову силу Fy вздовж перпендикулярної осі у (фіг. 6). Давач прискорення закріплений близько осі ротора, обертається разом з ним, і напрямляючі вектори осей чутливості теж синхронно обертаються. Тому значення ефективних відцентрових сил Fx, Fy осилюють між максимальним значенням, коли напрямок векторів діючих відцентрових сил F'x, F'y орієнтований вертикально донизу, і мінімальним, коли напрямок векторів діючих відцентрових сил F'x, F'y орієнтований вертикально догори. На основі сигналів Fx, Fy модуль обробки опорного сигналу формує параметри кутового положення ротора і в разі потреби миттєве значення швидкості обертання. Модуль обробки опорного сигналу може бути виконаний, наприклад, у формі аналогової схеми фазового автоматичного підстроювання частоти або цифрового сигнального процесора, на виході яких отримують значення кутового положення ротора і кутової частоти. Перевагою такого давача опорного сигналу є відсутність похибки, зумовленої відхиленням вежі від вертикального положення під дією поривів вітру, оскільки опорний сигнал формується за участі сталої на напрямком сили земного тяжіння, а не за положенням лопатей відносно вежі. На фіг. 6 представлена блок-схема, яка пояснює здійснення відповідного винаходові способу керування орієнтацією ВГ з посиланнями на суттєві для винаходу функціональні вузли відповідного винаходові вітрового генератора. За сигналом давача 6 положення лопатей модуль 9 обробки опорного сигналу формує гармонічний опорний сигнал, який містить інформацію про момент часу проходження лопатями нижнього вертикального положення, і який подають на вхід фазометра 10. На другий вхід фазометра 10 подають сигнал "тіні вежі", сформований із напруги генератора 5 у формувачі 11 обвідної та фільтрі 12 основної гармоніки сигналу аеродинамічної взаємодії лопатей ротора і вежі. Отриманий на виході фазометра 10 сигнал різниці фаз, відповідний часовій різниці між моментами вертикального нижнього положення лопатей і моментами перебування лопатей на лінії між напрямком вітру і вежею, подають на фільтр 13 нижніх частот, а з його виходу – на вхід модуля 14 керування актуатором орієнтації. Керуючий сигнал з виходу модуля 14 подають на виконавчий привідний елементактуатор 8 орієнтації, який здійснює обертання гондоли 2 відповідно до знаку і величини керуючого сигналу, усуваючи похибку орієнтації ротора ВГ на вітер. Форму виконання і параметри фільтра 13 нижніх частот і модуля керування актуатором вибирають в залежності від згаданих вище динамічних параметрів оточення і самого ВГ. Динаміка параметрів вітрового потоку і параметри актуатора орієнтації є визначальними. Відомо, що вітер дме з різною швидкістю, і це впливає на керованість ВГ за азимутом (система орієнтації стає менш ефективною при дуже низьких швидкостях), давач напряму вітру завжди забезпечує неточні і зашумлені дані про напрям. Крім того, динаміка приводу (тип двигунів, передатні числа редукторів, швидкість обертання і крутний момент) ВГ впливає на здатність системи швидко переорієнтувати гондолу за напрямком вітру, слідкувати за ним. Швидкі стохастичні зміни сигналу похибки орієнтації, зумовлені фактичними стохастичними варіаціями напряму вітру і точністю способу визначення похибки орієнтації, придушуються згладжуючим фільтром таким чином, щоб узгодити швидкості варіації напряму вітру з можливостями актуатора орієнтації ВГ. 6 UA 99876 C2 5 10 15 20 25 30 35 40 45 50 55 60 Так, з досвіду експлуатації подібних вітроенергетичних установок частота зрізу фільтра 13 -3 -3 нижніх частот може перебувати в діапазоні від 5,510 Гц до 8,310 Гц, а модуль 14 керування актуатором орієнтації може бути виконаний у вигляді Р-регулятора, РІ-регулятора, PIDрегулятора, нейронно-мережевого регулятора, регулятора з нечіткою логікою, адаптивного фільтра Калмана або лукап-таблиці. Наведена блок-схема та її опис покликані пояснити винахідницьку суть способу і не обмежують інші форми здійснення способу. Так, формування і обробка опорного та інформаційного сигналів можуть бути здійснені методами аналогової, імпульсної чи обчислювальної техніки. Фахівці в даній галузі без утруднень зможуть здійснити різні зміни і удосконалення запропонованого винаходу, які теж підпадають під його обсяг, відображений у формулі винаходу. Відповідний винаходові спосіб керування орієнтацією ВГ може бути застосований як для новостворюваних ВГ, так і для дообладнання існуючих. ФОРМУЛА ВИНАХОДУ 1. Спосіб керування орієнтацією вітрового генератора, який містить встановлену на нерухомій вежі з можливістю обертання навколо вертикальної осі гондолу з розміщеним у ній горизонтальним обертовим валом ротора, ротор турбіни, утворений принаймні двома встановленими на валу лопатями, які перетворюють кінетичну енергію вітру на енергію обертання вала ротора, з яким механічно зв'язаний електрогенератор, згідно з яким за допомогою контролера орієнтації обробляють сигнал, залежний від відхилення осі вала ротора від напрямку на вітер, і формують керуючий сигнал зворотного зв'язку, який подають на актуатор орієнтації до досягнення усунення вказаного відхилення, який відрізняється тим, що на актуатор орієнтації подають керуючий сигнал, який формують за часовою різницею між моментами часу перебування лопатей у нижньому вертикальному положенні, які визначають за опорним сигналом давача, зв'язаного з валом ротора, і моментами часу перебування лопатей на лінії між напрямком вітру і вежею, які визначають за періодичним сигналом паразитної амплітудної модуляції генерованого електрогенератором електричного змінного струму, зумовленим аеродинамічною взаємодією між лопатями і вежею. 2. Спосіб за п. 1, який відрізняється тим, що моменти часу перебування лопатей у нижньому вертикальному положенні формують із векторного сигналу давача положення ротора, закріпленого на валу ротора у площині, перпендикулярній до осі ротора, із зміщенням відносно центра ротора, причому одну із осей чутливості давача орієнтують вздовж напряму осі лопаті, магнітного енкодера з магнітною шкалою у вигляді кільця або стрічки, закріпленою на валу ротора, фотооптичного імпульсного енкодера з прозорим диском-шкалою, закріпленим на валу ротора, безконтактного індуктивного давача наближення і зубчастого диска, закріпленого на валу ротора або системи для визначення положення лопаті ротора вітрового генератора шляхом бездротової передачі сигналу, що включає в себе передавач, змонтований на лопаті ротора вітрового генератора, приймач та обчислювальний пристрій для визначення положення лопаті. 3. Спосіб за п. 1, який відрізняється тим, що періодичний сигнал аеродинамічної взаємодії лопатей ротора і вежі виділяють шляхом виконання послідовності дій: формування обвідної генерованого електрогенератором електричного змінного струму шляхом амплітудної демодуляції сигналу струму в околі частоти мережі; оцінювання періоду і коефіцієнтів Фур'є періодичної складової отриманої обвідної; виокремлення основної гармоніки сигналу аеродинамічної взаємодії лопатей ротора і вежі. 4. Спосіб за п. 3, який відрізняється тим, що часову різницю визначають як різницю фаз між опорним сигналом давача положення ротора і основною гармонікою періодичного сигналу аеродинамічної взаємодії лопатей ротора і вежі. 5. Спосіб за п. 4, який відрізняється тим, що сигнал часової різниці перед подачею на модуль керування актуатором орієнтації обробляють фільтром нижніх частот. 6. Спосіб за п. 5, який відрізняється тим, що фільтрований сигнал часової різниці подають на вхід модуля керування актуатором орієнтації, який виконаний у вигляді Р-регулятора, РІрегулятора, РID-регулятора, нейронно-мережевого регулятора, регулятора з нечіткою логікою, адаптивного фільтра Калмана або лукап-таблиці, і в якому формують керуючий сигнал для актуатора орієнтації. 7. Вітровий генератор, що містить встановлену на нерухомій вежі (1) з можливістю обертання навколо вертикальної осі гондолу (2), з розміщеним у ній з можливістю обертання навколо горизонтальної осі валом (3) ротора; ротор вітрової турбіни, утворений принаймні двома 7 UA 99876 C2 5 10 15 встановленими на маточині вала лопатями (4), виконаними з можливістю перетворення кінетичної енергії вітру на енергію обертання вала ротора; механічно зв'язаний з валом (3) ротора електрогенератор (5); контролер (7) орієнтації, вихід якого з'єднаний з актуатором (8) орієнтації, який відрізняється тим, що містить зв'язаний з валом (3) ротора давач (6) опорного сигналу нижнього вертикального положення лопатей (4) ротора, а також тим, що з'єднаний з давачем (6) опорного сигналу і з електрогенератором (5) контролер (7) орієнтації виконаний зі здатністю формування керуючого сигналу за часовою різницею між моментами часу перебування лопатей у нижньому вертикальному положенні, і моментами часу перебування лопатей на лінії між напрямком вітру і вежею. 8. Вітровий генератор за п. 7, який відрізняється тим, що контролер (7) орієнтації містить функціональні вузли: формувач (11) обвідної сигналу генератора (5), з'єднаний з виходом формувача (11) фільтр (12) основної гармоніки періодичного сигналу аеродинамічної взаємодії лопатей (4) ротора і вежі (1), з'єднаний з давачем (6) модуль (9) обробки опорного сигналу, фазометр (10), з'єднаний з виходами модуля (9) обробки опорного сигналу і фільтра (12) основної гармоніки періодичного сигналу аеродинамічної взаємодії лопатей ротора і вежі, низькочастотний фільтр (13) сигналу часової різниці та з'єднаний з його виходом модуль (14) керування актуатором орієнтації у вигляді Р-регулятора, РІ-регулятора, PID-регулятора, нейронно-мережевого регулятора, регулятора з нечіткою логікою, адаптивного фільтра Калмана або лукап-таблиці, вихід якого з'єднаний з актуатором (8) орієнтації. 8 UA 99876 C2 9 UA 99876 C2 10 UA 99876 C2 11 UA 99876 C2 Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 12
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for control of orientation of wind turbine and wind turbine
Автори англійськоюMykhailyshyn Viktor Yuriiovych
Назва патенту російськоюСпособ управления ориентацией ветрового генератора и ветровой генератор
Автори російськоюМихайлишин Виктор Юрьевич
МПК / Мітки
МПК: F03D 7/04
Мітки: спосіб, вітровій, керування, генератора, орієнтацією, вітрового, генератор
Код посилання
<a href="https://ua.patents.su/14-99876-sposib-keruvannya-oriehntaciehyu-vitrovogo-generatora-ta-vitrovijj-generator.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування орієнтацією вітрового генератора та вітровий генератор</a>
Роторний вітровий генератор
Номер патенту: 73480
Опубліковано: 25.09.2012
Автори: Подригало Михайло Абович, Абдулгазіс Умер Абдулайович, Феватов Сададін Асанович, Абдулгазіс Азіз Умерович, Халілов Вадім, Ягьяев Ельмар Енверович
МПК: F03D 3/04
Мітки: роторний, генератор, вітровій
Формула / Реферат:
Роторний вітровий генератор, що містить закріплені на вертикальній осі криволінійні парні лопаті, спрямовані в одну сторону, із зустрічним зрушенням суміжних кінців за зазначену вісь, який відрізняється тим, що парні лопаті закріплені на вертикальній осі одна над одною, кожна наступна пара яких розгорнута щодо попередньої на кут, кратний числу пар лопатей ротора, при цьому вітровий генератор оснащений кожухом із флюгаркою, установленим з...
Вітровий приймач для пірамідального вітрового двигуна
Номер патенту: 17569
Опубліковано: 16.10.2006
Автор: Степанчук Аркадій Миколайович
МПК: F03D 3/00
Мітки: приймач, двигуна, пірамідального, вітрового, вітровій
Формула / Реферат:
1. Вітровий приймач для пірамідального вітрового двигуна, що включає вертикальну вісь з рівномірно закріпленими на ній пірамідальними лопатями, який відрізняється тим, що опорно-поворотний контур, спираючись у верхній своїй частині на підшипниковий вузол, закріплений на опорному контурі вітрового двигуна, містить коромисло, на яке кріпляться навпроти один одного, відносно центральної частини вітрового приймача, хвостове оперення і вхідний...
Вітровий двигун
Номер патенту: 6059
Опубліковано: 15.04.2005
Автор: Бордюжа Всеволод Вікторович
МПК: F03D 5/00
Формула / Реферат:
Вітровий двигун, що має не менше трьох лопатей з паралельними осями обертання, розташованих на кінцях важелів, симетрично зв'язаних із ротором, який відрізняється тим, що вільне обертання кожної лопаті обмежене з одного і того ж боку уявною площиною, якій належать осі ротора та відповідної лопаті.
Спосіб релейного керування орієнтацією космічного апарату
Номер патенту: 16469
Опубліковано: 29.08.1997
Автори: Карпачев Юрій Андрійович, Анупрієнко Генадій Єфремович, Павловський Михайло Антонович, Лезов Віктор Георгійович, Клименко Олександр Миколайович
МПК: B64G 1/24
Мітки: спосіб, релейного, апарату, керування, космічного, орієнтацією
Формула / Реферат:
Способ релейного управлений ориентацией космического аппарата, основанный на формировании релейного сигнала по угловому отклонению и приложении к корпусу космического аппарата уменьшающегося со временем управляющего момента при наличии релейного сигнала, отличающийся тем, что, с целью повышения точности путем стабилизации декремента затухания переходного процесса при уменьшении амплитуды колебаний по угловой скорости, при первом цикле...
Спосіб керування збудженням синхронного генератора при зміні частоти вихідної напруги
Номер патенту: 53711
Опубліковано: 11.10.2010
Автори: Рябенький Володимир Михайлович, Білоконь Олександра Леонідівна, Ушкаренко Олександр Олегович, Нікішина Маргарита Володимирівна
МПК: H02M 1/08
Мітки: керування, зміни, генератора, вихідної, спосіб, збудженням, напруги, синхронного, частоти
Формула / Реферат:
Спосіб керування збудженням синхронного генератора при зміні частоти вихідної напруги, в якому перетворюють вихідну напругу генератора в аналоговий сигнал за допомогою функціональної структури для подальшого перетворення і наступного...
Попередній патент: Спосіб одержання терморозширеного графіту
Наступний патент: Спосіб виготовлення штаб з металу і виробнича установка для здійснення цього способу
Випадковий патент: Спосіб панкреатодуоденальної резекції