Спосіб релейного керування орієнтацією космічного апарату
Номер патенту: 16469
Опубліковано: 29.08.1997
Автори: Клименко Олександр Миколайович, Карпачев Юрій Андрійович, Павловський Михайло Антонович, Анупрієнко Генадій Єфремович, Лезов Віктор Георгійович
Формула / Реферат
Способ релейного управлений ориентацией космического аппарата, основанный на формировании релейного сигнала по угловому отклонению и приложении к корпусу космического аппарата уменьшающегося со временем управляющего момента при наличии релейного сигнала, отличающийся тем, что, с целью повышения точности путем стабилизации декремента затухания переходного процесса при уменьшении амплитуды колебаний по угловой скорости, при первом цикле регулирования прикладывают к корпусу космического аппарата максимально возможный импульс ускорения 5^ ^-^^Тщах' ^ ^шах ~ максимально возможная амплитуда углового ускорения; т — максимально возможная длительность действия управляющего момента, измеряют длительность наличия релейного сигнала 1, и сравнивают ее с максимальной установленной для данного цикла управления длительностью т, изменяющегося со временем управляющего момента, при последующем появлении релейного сигнала при ц >г, уменьшают максимально возможную величину полного импульса ускорения до величины, определяемой в соответствии со следующим выражением: ^^, где ^і==т,/1^.
Текст
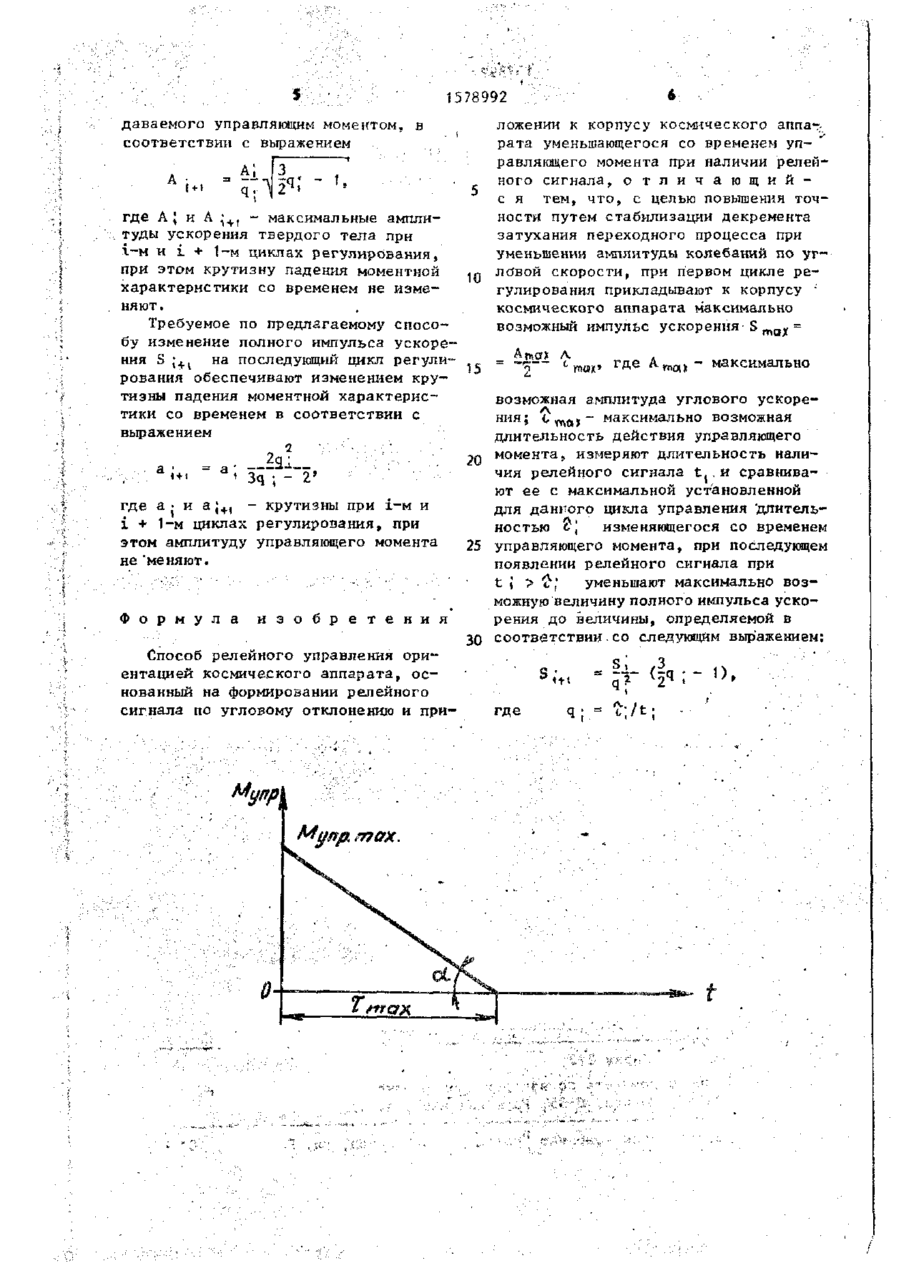
Изобретение относится к космон а в т и к е . Целью изобретения является повышение точности путем стабилизации декремента затухания переходного процесса при уменьшении амплитуды к о л е баний по угловой скорости. Для управ Изобретенне относится к космонавтике. Целью изобретения является повышение точности путем стабилизации де кремента затухания переходного процесса при уменьшении амплитуды колебаний по угловой скорости. На чертеже показан вид управляющего 'момента. Способ заключается в том, что для успокоения переходного процесса по угловой скорости и угловой стабилизации на пассивных участках т р а е к т о рии полета космического аппарата двигатель-маховик с падающей со вре-, 26-90 . г' ления ориентацией космического аппарата формируют релейный сигнал по угловому отклонению. Для успокоения переходного процесса по угловой скорости и угловой стабилизации 'на п а с сивных участках полета космического аппарата используют двигатель-маховик с моментной характеристикой, падающей со временем, который включают и выключают по сигналам поляризованного р е л е . При этом при первом цикле р е г у лирования устанавливают максимальную величину импульса управляющего мо- • мента, а в последующих циклах р е г у лирования устанавливают величину полного импульса управляющего момента в зависимости от соотношений для предыдущего цикла регулирования между длительностью наличия релейного сигнала и максимально возможной д л и т е л ь ностью наличия релейного сигнала на этом цикле. 1 ил. менем моментной характеристикой включают и выключают по сигналам поляризованного реле. Уравнения вращдтельного движения твердого тела представлены в виде tf(t) - - (А - at) U ; г qp(t) = ~ (At - - | - ) . U + Ч\>; ( О где fcf , Ч , Ч1 ~ угол» угловая с к о > рость и угловое ускорение твердого тела соответственно; 1578992 Cf0 и C Q - угол и угловая скоP рость в момент пключения двигателя.маховика; U - сигнал управления дви-'е гателем-маховиком; t - время. Сигнал U управления двигателем описывается следукщей зависимостью: 10 +1 при Ц> > ц> 1 V =1 О при - Ц , (2) -1 ПРИ (А a t ) . f5 - - ускорение, созда са падает. Для стабилизации декремента затухания необходимо, чтобы в каждом цикле регулирования t = t Способ релейного управления ориентацией твердого тела осуществляют в следующей последовательности: формируют релейный сигнал по угловому отклонению; при первом цикле регулирования устанавливают максимальную величину S ^qy импульса управляющего момента; измеряют длительность наличия релейного сигнала в і-м цикле регулирования t: ; сравнивают t J с максимальной длительностью с , для і-го цикла регулирования; при t ;
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of two-position control of orientation of spacecraft
Автори англійськоюAnuprienko Hennadii Yefremovych, Karpachov Yurii Andriiovych, Klymenko Oleksandr Mykolaiovych, Lezov Viktor Heorhiiovych, Pavlovskyi Mykhailo Antonovych
Назва патенту російськоюСпособ релейного управления ориентацией космического аппарата
Автори російськоюАнуприенко Геннадий Ефремович, Карпачов Юрий Андреевич, Клименко Александр Николаевич, Лезов Виктор Георгиевич, Павловский Михаил Антонович
МПК / Мітки
МПК: B64G 1/24
Мітки: релейного, апарату, спосіб, космічного, керування, орієнтацією
Код посилання
<a href="https://ua.patents.su/4-16469-sposib-relejjnogo-keruvannya-oriehntaciehyu-kosmichnogo-aparatu.html" target="_blank" rel="follow" title="База патентів України">Спосіб релейного керування орієнтацією космічного апарату</a>
Спосіб релейного керування орієнтацією космічного апарату
Номер патенту: 15001
Опубліковано: 30.06.1997
Автори: Карпачов Юрій Андрійович, Павловський Михайло Антонович, Анупрієнко Генадій Єфремович
МПК: B64G 1/24
Мітки: керування, космічного, апарату, спосіб, релейного, орієнтацією
Формула / Реферат:
Способ релейного управления ориентацией космического аппарата, заключающийся в формировании релейного сигнала по угловому отклонению, приложении к корпусу космического аппарата управляющего момента при наличии релейного сигнала, прикладывании к корпусу космического аппарата при первом цикле регулирования максимально возможного импульса ускорения, измерении длительности релейного сигнала t и сравнении t с установленной длительностью t ,...
Спосіб керування орієнтацією космічного апарату
Номер патенту: 3754
Опубліковано: 27.12.1994
Автор: Анупрієнко Генадій Єфремович
Мітки: орієнтацією, керування, спосіб, апарату, космічного
Формула / Реферат:
Способ управления ориентацией космического аппарата, включающий измерение углового отклонения ориентируемой оси космического аппарата от требуемого направления, определение моментов времени, в которые измеряемое угловое отклонение принимает экстремальные значения, изменение момента инерции космического аппарата в моменты времени, соответствующие экстремальным значениям углового отклонения и значениям углового отклонения, находящимся в зоне...
Спосіб формування заданого керуючого моменту при керуванні орієнтацією космічного апарату
Номер патенту: 12527
Опубліковано: 28.02.1997
Автор: Анупрієнко Генадій Єфремович
МПК: B64G 1/28
Мітки: керуючого, керуванні, орієнтацією, космічного, апарату, заданого, моменту, спосіб, формування
Формула / Реферат:
1. Способ формирования заданного управляющего момента при управлении ориентацией космического аппарата, содержащий операции сравнения измеряемой величины с заданной и релейной включение электромаховичного двигателя (ЭМД) в зависимости от результатов упомянутого сравнения, отличающийся тем, что в качестве измеряемой величины используют скорости вращения маховика ЭМД, а в качестве заданной' величины - измеряемую во времени по заданному...
Пристрій для керування рухом космічного апарату навколо центру мас
Номер патенту: 3991
Опубліковано: 27.12.1994
Автор: Анупрієнко Генадій Єфремович
МПК: B64G 1/24
Мітки: мас, пристрій, центру, керування, космічного, апарату, рухом
Формула / Реферат:
1. Устройство для управления движением космического аппарата вокруг центра масс, содержащее релейный гироскопический датчик угловой скорости, блок управления исполнительным органом и исполнительный орган, отличающееся тем, что в него введены генератор колебаний и устройство сравнения длительности или частоты сигналов релейного гироскопического датчика угловой скорости с длительностью полупериода или частотой генератора колебаний, релейный...
Пристрій для визначення відносної кутової швидкості при коливальному процесі управління орієнтацією космічного апарата
Номер патенту: 10788
Опубліковано: 25.12.1996
Автори: Павловський Михайло Антонович, Карпачов Юрій Андрійович, Анупрієнко Генадій Єфремович
МПК: B64G 1/24
Мітки: швидкості, відносної, пристрій, визначення, кутової, управління, коливальному, орієнтацією, космічного, апарата, процесі
Формула / Реферат:
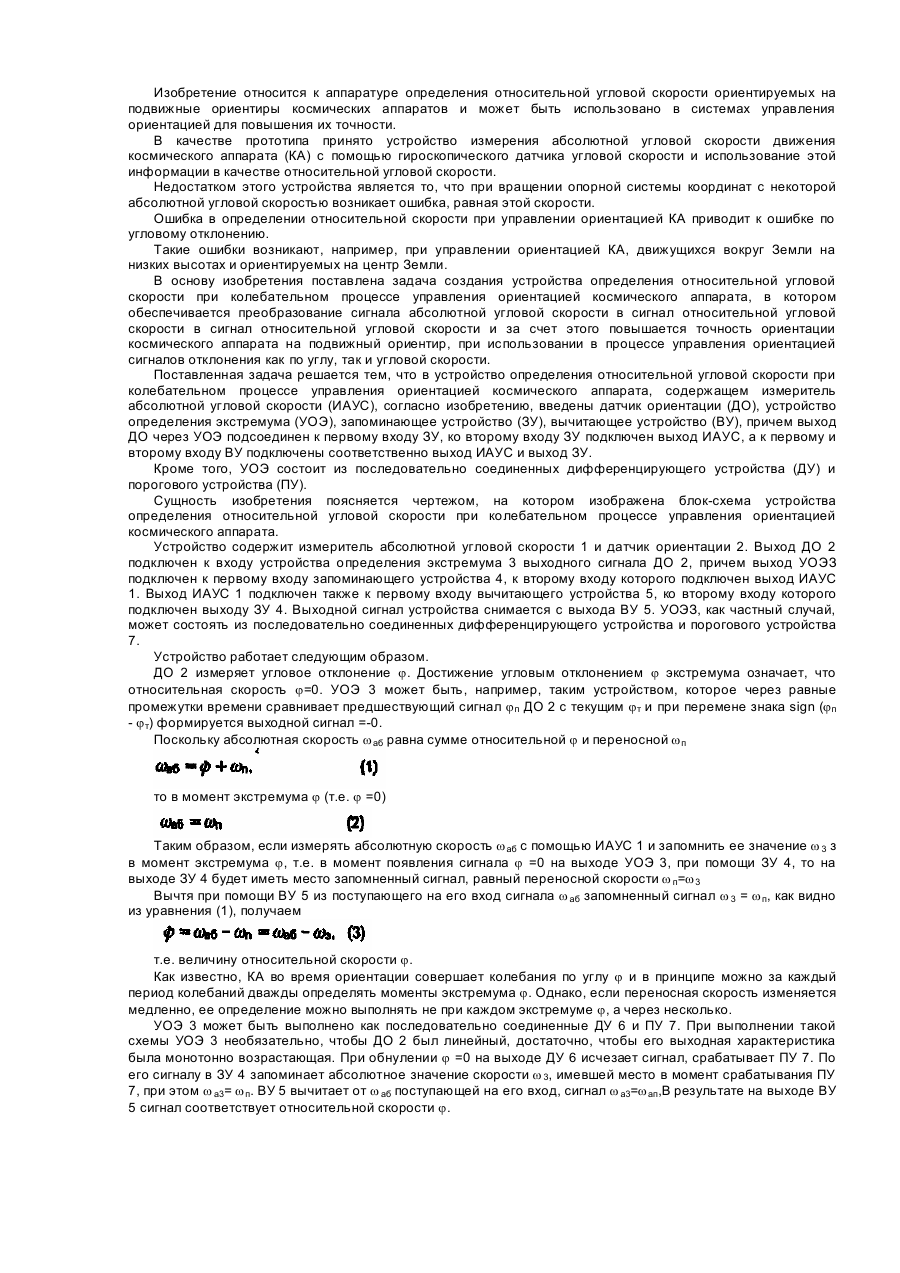
1. Устройство определения относительной угловой скорости при колебательном процессе управления ориентацией космического аппарата, содержащее измеритель абсолютной угловой скорости, отличающееся тем, что введены датчик ориентации, устройство определения экстремума, запоминающее устройство и вычитающее устройство, причем выход датчика ориентации через устройство определения экстремума подсоединен к первому входу запоминающего устройства,...
Попередній патент: Спосіб безперервного лиття сталі
Наступний патент: Пристрій для намотування секцій рулонних конденсаторів
Випадковий патент: Спосіб лікування дуоденальної виразки з супутнім хронічним бронхітом в осіб молодого віку