Система та спосіб для визначення опорної позиції
Формула / Реферат
1. Спосіб визначення опорної позиції для базової станції DGNSS, причому спосіб включає етапи:
i) визначення поточної орієнтовної позиції базової станції як певної кількості компонентів набору координат за допомогою GNSS-приймача;
ii) відшукування опорної позиції, що зберігається у пам’яті, з-поміж однієї або кількох опорних позицій, що зберігаються у пам’яті базової станції, як певної кількості компонентів набору координат;
iii) перетворення двох або більшої кількості компонентів кожного з набору координат опорної позиції, що зберігається у пам’яті, та поточної орієнтовної позиції на формат двійкової послідовності;
iv) узгодження поточної орієнтовної позиції з опорною позицією, що зберігається у пам’яті, шляхом узгодження двох або більшої кількості компонентів формату двійкової послідовності поточної орієнтовної позиції з двома або більшою кількістю компонентів формату двійкової послідовності опорної позиції, що зберігається у пам’яті; та
v) призначення базовій станції опорної позиції, яка є однією з опорних позицій, що зберігаються у пам’яті, якщо опорна позиція, що зберігається у пам’яті, є узгодженою з поточною орієнтовною позицією в операції узгодження.
2. Спосіб за п. 1, який відрізняється тим, що усі з компонентів кожного з набору координат опорної позиції, що зберігається у пам’яті, та поточної орієнтовної позиції перетворюються на формат двійкової послідовності.
3. Спосіб за п. 1, який відрізняється тим, що усі з компонентів формату двійкової послідовності поточної орієнтовної позиції узгоджуються з компонентами формату двійкової послідовності опорної позиції, що зберігається у пам’яті.
4. Спосіб за п. 1, який відрізняється тим, що узгодження поточної орієнтовної позиції з опорною позицією, що зберігається у пам’яті, включає узгодження кожного компонента набору координат формату двійкової послідовності поточної орієнтовної позиції з відповідним компонентом набору координат формату двійкової послідовності опорної позиції, що зберігається у пам’яті.
5. Спосіб за п. 1, який відрізняється тим, що спосіб включає етап маніпуляції одним або обома з наборів координат опорної позиції, що зберігається у пам’яті, та поточної орієнтовної позиції перед узгодженням компонентів наборів координат.
6. Спосіб за п. 1, який відрізняється тим, що спосіб включає етап розрахунку нової опорної позиції та призначення базовій станції нової опорної позиції, якщо жодна з опорних позицій, що зберігаються у пам’яті, не є узгодженою з поточною орієнтовною позицією.
7. Спосіб за п. 6, який відрізняється тим, що спосіб включає етап зберігання нової опорної позиції у пам’яті базової станції як опорної позиції, що зберігається у пам’яті.
8. Спосіб за п. 5, який відрізняється тим, що маніпуляція з наборами координат включає зміщення компонентів наборів координат на фіксовану величину для забезпечення того, щоб набори координат включали лише додатні компоненти.
9. Спосіб за п. 5, який відрізняється тим, що маніпуляція з наборами координат включає масштабування компонентів наборів координат.
10. Спосіб за п. 8, який відрізняється тим, що компоненти наборів координат масштабують після зміщення компонентів.
11. Спосіб за пп. 9 або 10, який відрізняється тим, що масштабування наборів координат включає ділення кожного з компонентів на масштабний коефіцієнт.
12. Спосіб за п. 1, який відрізняється тим, що узгодження компонентів наборів координат включає врахування зміни нульового розряду у кожному з компонентів таким чином, щоб узгоджувалися компоненти, які мають різницю лише у нульовому розряді.
13. Спосіб за п. 1, який відрізняється тим, що узгодження поточної орієнтовної позиції з опорною позицією, що зберігається у пам’яті, включає:
конкатенацію компонентів формату двійкової послідовності кожної поточної орієнтовної позиції та опорної позиції, що зберігається у пам’яті;
виконання алгоритму контрольних сум на конкатенованих компонентах формату двійкової послідовності для визначення контрольної суми позиції для кожної поточної орієнтовної позиції та опорної позиції, що зберігається у пам’яті; та
порівняння контрольних сум позицій для визначення узгодження.
14. Система для визначення опорної позиції, яка включає базову станцію DGNSS, яка включає:
запам’ятовуючий пристрій для зберігання однієї або кількох опорних позицій, що зберігаються у пам’яті, як набори координат, що включають компоненти;
GNSS-приймач для визначення поточної орієнтовної позиції базової станції як набір координат, що включає компоненти; та
логічний контролер, який діє для:
перетворення двох або більшої кількості компонентів кожного з наборів координат опорної позиції, що зберігається у пам’яті, та поточної орієнтовної позиції на формат двійкової послідовності;
узгодження поточної орієнтовної позиції з опорною позицією, що зберігається у пам’яті, шляхом узгодження двох або більшої кількості компонентів формату двійкової послідовності поточної орієнтовної позиції з двома або більшою кількістю компонентів формату двійкової послідовності опорної позиції, що зберігається у пам’яті; та
призначення базовій станції опорної позиції, яка є однією з опорних позицій, що зберігаються у пам’яті, якщо опорна позиція, що зберігається у пам’яті, є узгодженою з поточною орієнтовною позицією.
15. Придатний для комп’ютерного зчитування носій інформації з виконуваною програмою, яка на ньому зберігається, який відрізняється тим, що програма дає команду на логічний контролер для виконання таких етапів:
перетворення двох або більшої кількості компонентів набору координат опорної позиції, що зберігається у пам’яті, на формат двійкової послідовності;
перетворення двох або більшої кількості компонентів набору координат поточної орієнтовної позиції, визначеної GNSS-приймачем, на формат двійкової послідовності;
узгодження поточної орієнтовної позиції з опорною позицією, що зберігається у пам’яті, шляхом узгодження двох або більшої кількості компонентів формату двійкової послідовності поточної орієнтовної позиції з двома або більшою кількістю компонентів формату двійкової послідовності опорної позиції, що зберігається у пам’яті; та
призначення базовій станції опорної позиції, яка є однією з опорних позицій, що зберігаються у пам’яті, якщо опорна позиція, що зберігається у пам’яті, є узгодженою з поточною орієнтовною позицією.
Текст
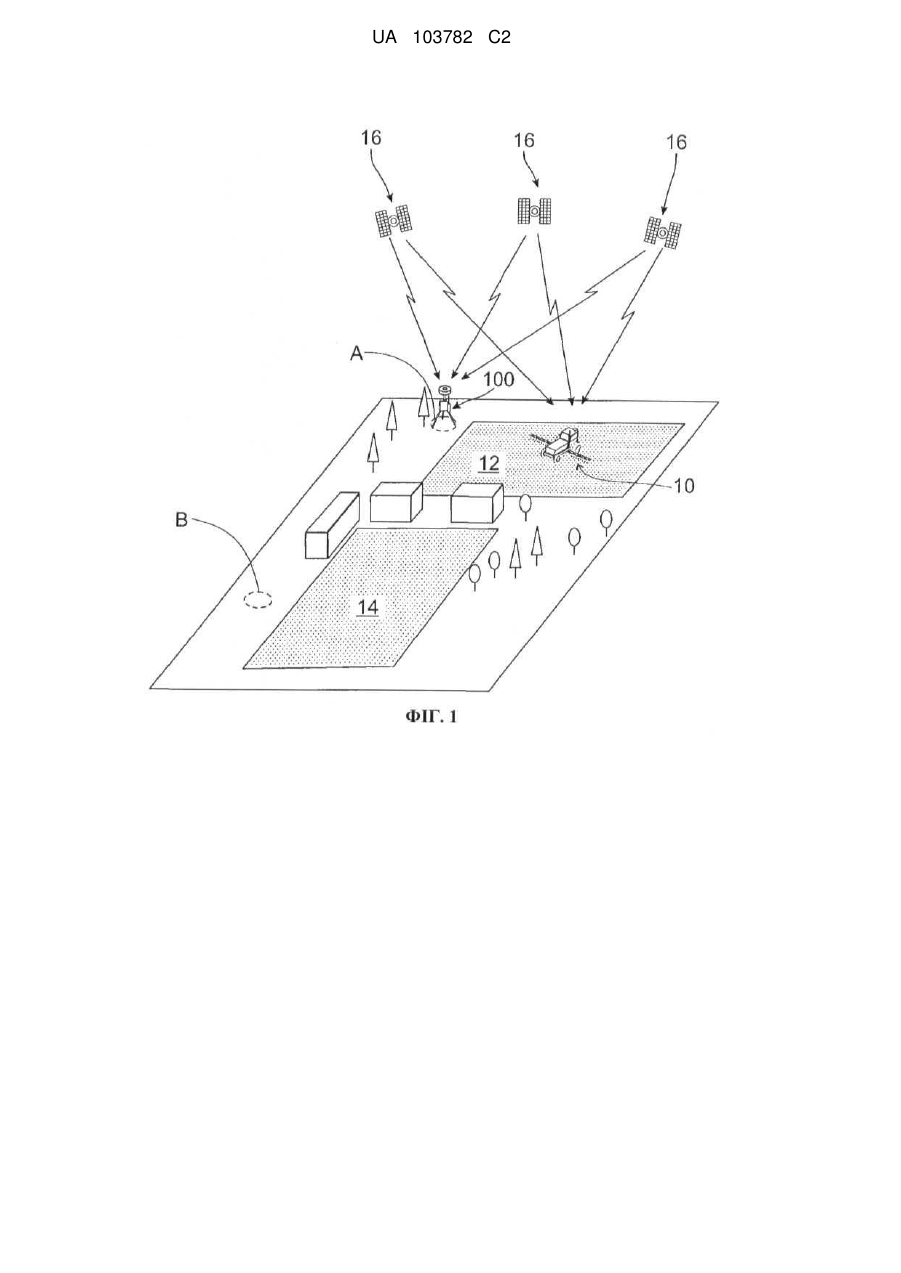
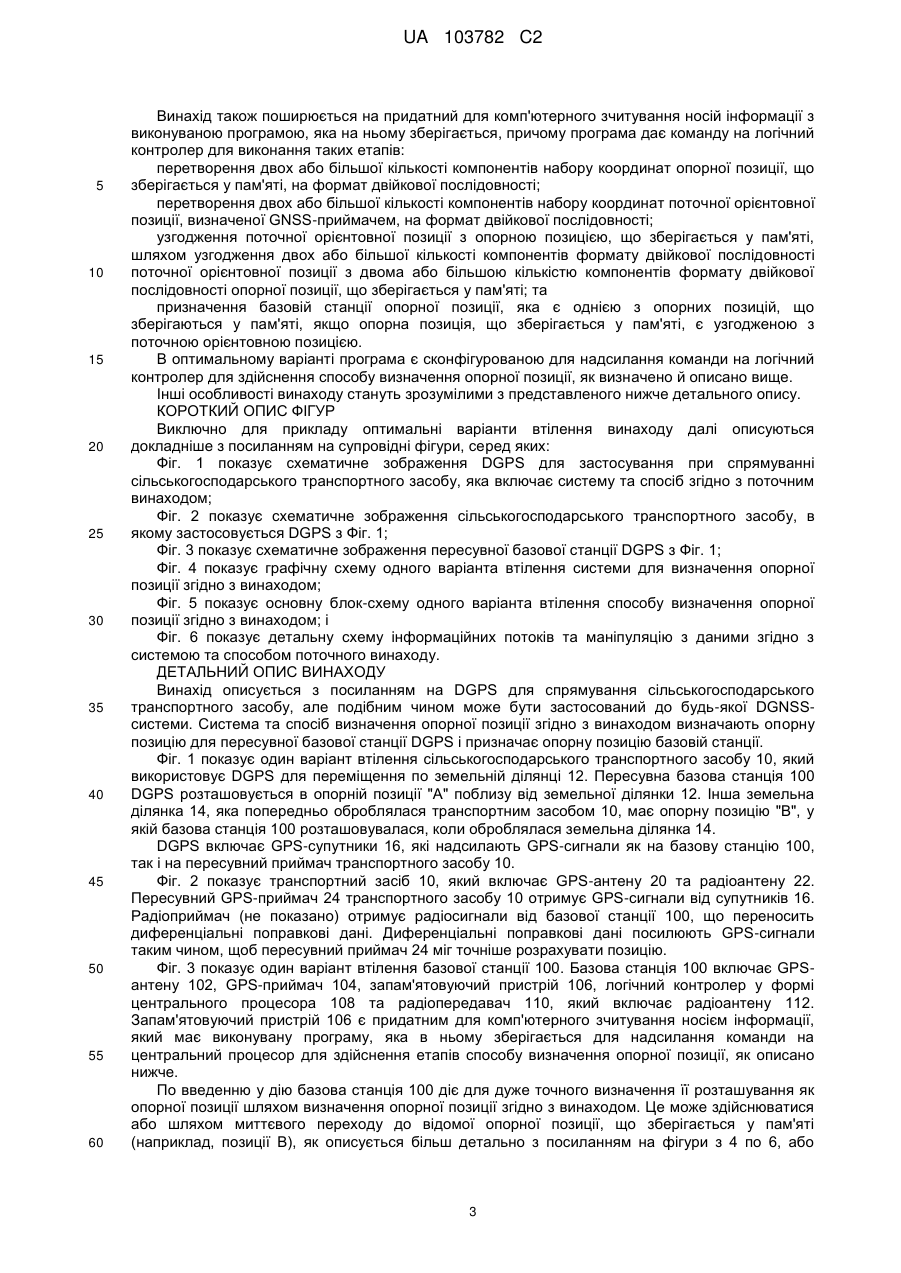
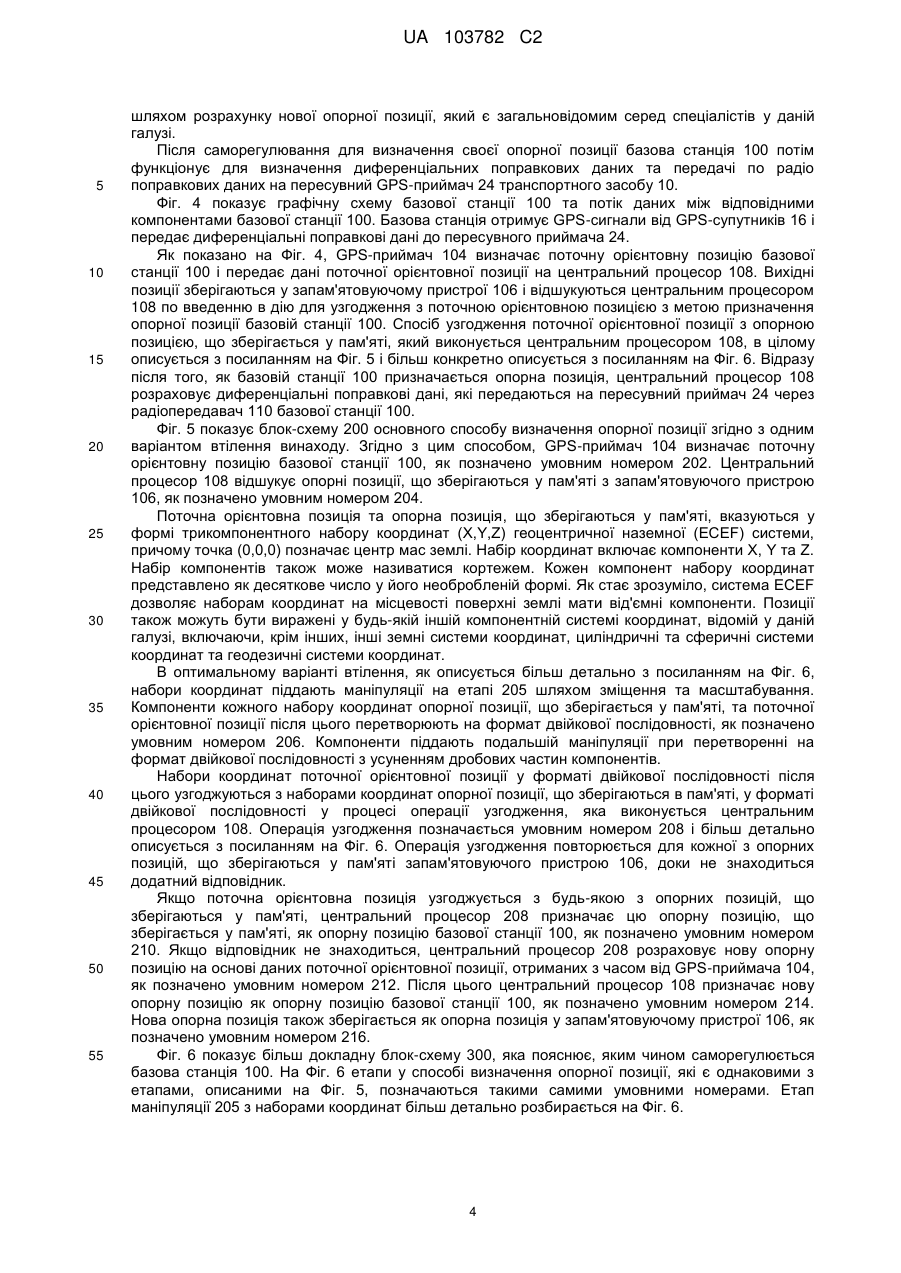
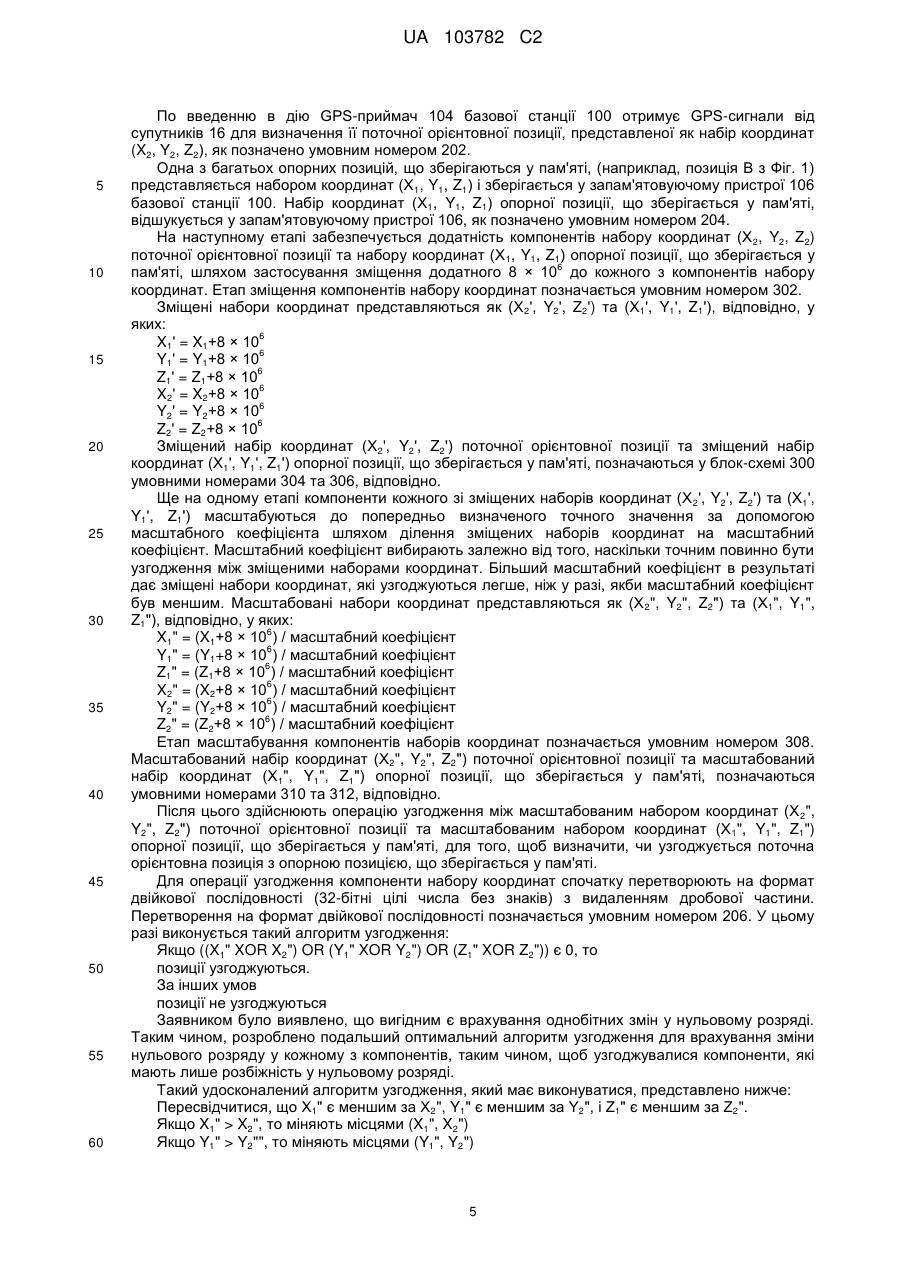
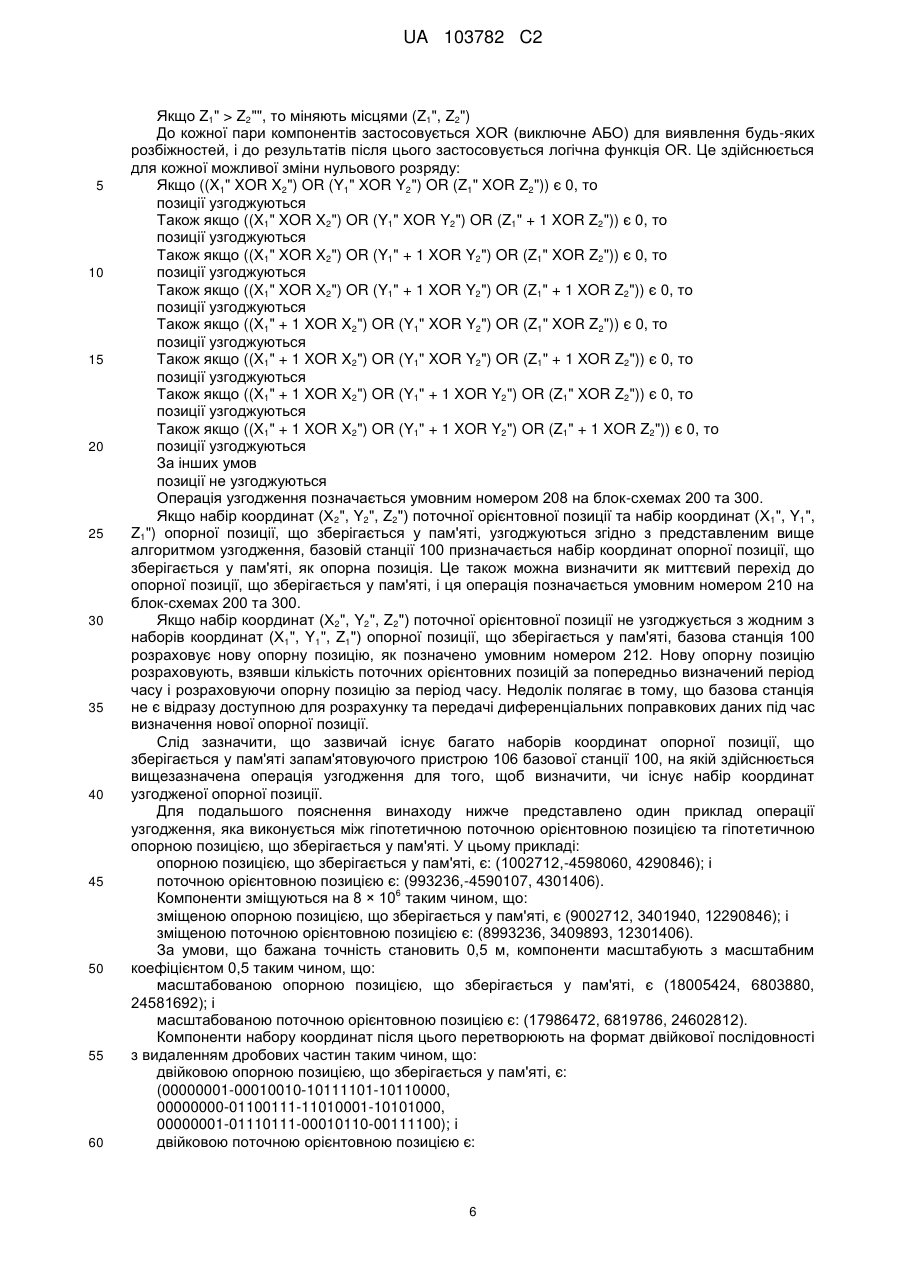
Реферат: Спосіб визначення вихідної позиції для базової станції DGNSS. Базова станція включає запам'ятовуючий пристрій, логічний контролер та GNSS-приймач. Вихідні позиції зберігаються у пам'яті як системи координат, що включають компоненти. GNSS-приймач визначає поточну орієнтовну позицію базової станції як систему координат, яка включає компоненти. Логічний контролер відшукує вихідну позицію, що зберігається у пам'яті, перетворює компоненти вихідної позиції, що зберігається у пам'яті, та поточної орієнтовної позиції на формат двійкової послідовності. Поточна орієнтовна позиція узгоджується з вихідною позицією, що зберігається у пам'яті, шляхом узгодження компонентів формату двійкової послідовності поточної орієнтовної позиції з компонентами формату двійкової послідовності вихідної позиції, що зберігається у пам'яті. Якщо вихідна позиція, що зберігається у пам'яті, є узгодженою з поточною орієнтовною позицією, базовій станції призначається вихідна позиція, що зберігається у пам'яті, як її вихідна позиція. UA 103782 C2 (12) UA 103782 C2 UA 103782 C2 5 10 15 20 25 30 35 40 45 50 55 ГАЛУЗЬ ВИНАХОДУ Даний винахід стосується системи та способу для визначення опорної позиції. Зокрема, винахід стосується системи та способу для визначення опорної позиції для застосування з диференціальними глобальними навігаційними супутниковими системами (DGNSS), такими як диференціальні системи глобального позиціонування (DGPS). РІВЕНЬ ТЕХНІКИ У багатьох випадках застосовують способи та системи для визначення позиції, наприклад, геодезичного інструмента, транспортного засобу і т. ін., які ґрунтуються на глобальних системах позиціонування, таких, як, наприклад, GPS, GLONASS або європейська система Galileo. Ці глобальні навігаційні супутникові системи (GNSS) ґрунтуються на прийманні супутникових сигналів. DGNSS є супутниковими системами позиціонування, у яких диференціальні поправкові дані визначають, використовуючи базову станцію у точно відомому місці (опорна позиція), і ці диференціальні поправкові дані потім передаються на пересувний GNSS-приймач для поліпшення точності пересувного GNSS-приймача. Базова станція у відомому місці має GNSSприймач, який порівнює виміряні дані отриманих зондуючих сигналів GNSS з сигналами, отримання яких очікувалося б у відомому місці, для створення, таким чином, диференціальних поправкових даних на основі розбіжностей. Диференціальні поправкові дані передаються на пересувний приймач по радіо для застосування у реальному часі для посилення GNSSсигналів, отриманих пересувним приймачем, і забезпечення, таким чином, більш точного позиціонування. В іншому прикладі базова станція передає точно відомі позиційні координати разом з фактично виміряними даними зондуючих сигналів GNSS, отриманих GNSS-приймачем базової станції. Пересувний GNSS-приймач використовує ці виміряні дані для створення даних, відомих серед спеціалістів як спостереження першої різниці, які використовуються для розрахунку позиції пересувного пристрою відносно позиції базової станції. Відносна позиція пересувного пристрою відображається на абсолютну позицію шляхом додавання різниці до попередньо визначеної позиції пересувного пристрою. Хоча обидва приклади визначення позиції пересувного пристрою мають чітку різницю, визначені в результаті рішення щодо позиції є математично еквівалентними. Похибки вимірювання GNSS, які коректуються диференціальними способами виникають здебільшого через атмосферні чинники, такі, як кількість водяної пари у тропосфері або перешкоди в іоносфері, спричинені сонячними спалахами. Ці чинники стають некорельованими на довгих відстанях, але є висококорельованими на коротких відстанях. Таким чином, DGNSS забезпечує тим більшу точність, чим ближче розташовується базова станція до пересувного приймача, оскільки чинники навколишнього середовища для двох приймачів у цьому разі є більш подібними. При застосуванні радіо для передачі диференціальних поправкових даних базова станція та пересувний приймач мають перебувати достатньо близько одне до одного таким чином, щоб диференціальні поправкові дані могли передаватися між базовою станцією та пересувним приймачем. Один з недоліків переміщення базової станції полягає в тому, що базова станція вимагає багато часу для розрахунку точної нової опорної позиції. У сільському господарстві базова станція зазвичай переміщується між конкретними попередніми місцями розташування. У патентах US7,400,294 та US6,140,959 описуються DGNSS-системи, у яких опорна позиція для базової (опорної) станції миттєво переходить до позиції, яка попередньо зберігалась у пам'яті, якщо відстань між позицією, яка попередньо зберігалась у пам'яті, та поточною позицією є меншою за встановлену відстань. У цих патентах існуючого рівня техніки нічого не сказано про те, яким чином визначається відстань між двома позиціями, або яку методологію застосовують для узгодження позицій. КОРОТКИЙ ОПИС ВИНАХОДУ В одній формі, хоча вона не має бути найширшою формою, винахід ґрунтується на способі визначення опорної позиції для базової станції DGNSS, причому спосіб включає етапи: i) визначення поточної орієнтовної позиції базової станції як певної кількості компонентів набору координат за допомогою GNSS-приймача; ii) відшукування опорної позиції, що зберігається у пам'яті, з-поміж однієї або кількох опорних позицій, що зберігаються у пам'яті базової станції, як певної кількості компонентів набору координат; iii) перетворення двох або більшої кількості компонентів кожного з наборів координат опорної позиції, що зберігається у пам'яті, та поточної орієнтовної позиції на формат двійкової послідовності; 1 UA 103782 C2 5 10 15 20 25 30 35 40 45 50 55 60 iv) узгодження поточної орієнтовної позиції з опорною позицією, що зберігається у пам'яті, шляхом узгодження двох або більшої кількості компонентів формату двійкової послідовності поточної орієнтовної позиції з двома або більшою кількістю компонентів формату двійкової послідовності опорної позиції, що зберігається у пам'яті; та v) призначення базовій станції опорної позиції, яка є однією з опорних позицій, що зберігаються у пам'яті, якщо опорна позиція, що зберігається у пам'яті, є узгодженою з поточною орієнтовною позицією в операції узгодження. В оптимальному варіанті усі з компонентів кожного з набору координат опорної позиції, що зберігається у пам'яті, та поточної орієнтовної позиції перетворюються на формат двійкової послідовності, і всі з компонентів формату двійкової послідовності поточної орієнтовної позиції узгоджуються з відповідними компонентами формату двійкової послідовності опорної позиції, що зберігається у пам'яті. В оптимальному варіанті один або обидва з наборів координат опорної позиції, що зберігається у пам'яті, та поточної орієнтовної позиції піддають маніпуляції перед узгодженням компонентів набору координат. В оптимальному варіанті узгодження поточної орієнтовної позиції з опорною позицією, що зберігається у пам'яті, включає узгодження кожного компонента набору координат формату двійкової послідовності поточної орієнтовної позиції з відповідним компонентом набору координат формату двійкової послідовності опорної позиції, що зберігається у пам'яті. В оптимальному варіанті спосіб включає етап маніпуляції з одним або обома наборами координат опорної позиції, що зберігається у пам'яті, та поточної орієнтовної позиції перед узгодженням наборів координат. Маніпуляція з наборами координат в оптимальному варіанті включає зміщення компонентів набору координат на фіксовану величину для забезпечення того, щоб набори координат включали лише додатні компоненти. Маніпуляція також може включати масштабування компонентів після їх зміщення. В оптимальному варіанті спосіб включає етап розрахунку нової опорної позиції та призначення базовій станції нової опорної позиції, якщо жодна з опорних позицій, що зберігаються у пам'яті, не є узгодженою з поточною орієнтовною позицією. Нова опорна позиція в оптимальному варіанті зберігається у пам'яті базової станції як опорна позиція. Необов'язково узгодження компонентів набору координат включає врахування зміни нульового розряду у кожному з компонентів таким чином, щоб узгоджувалися компоненти, які мають різницю лише в нульовому розряді. В іншій формі винаходу узгодження набору координат включає: конкатенацію компонентів формату двійкової послідовності кожної поточної орієнтовної позиції та опорної позиції, що зберігається у пам'яті; виконання алгоритму контрольних сум на конкатенованих компонентах формату двійкової послідовності для визначення контрольної суми позиції для кожної поточної орієнтовної позиції та опорної позиції, що зберігається у пам'яті; та порівняння контрольних сум позицій для визначення узгодження. В оптимальному варіанті кожен компонент перед конкатенацією округлюється до найближчого кратного потрібного точного значення. Винахід поширюється на систему для визначення опорної позиції, яка включає базову станцію DGNSS, причому система включає: запам'ятовуючий пристрій для зберігання однієї або кількох опорних позицій, що зберігаються у пам'яті, як набори координат, що включають компоненти; GNSS-приймач для визначення поточної орієнтовної позиції базової станції як набори координат, що включає компоненти; та логічний контролер, який діє для: перетворення двох або більшої кількості компонентів кожного з наборів координат опорної позиції, що зберігається у пам'яті, та поточної орієнтовної позиції на формат двійкової послідовності; узгодження поточної орієнтовної позиції з опорною позицією, що зберігається у пам'яті, шляхом узгодження двох або більшої кількості компонентів формату двійкової послідовності поточної орієнтовної позиції з двома або більшою кількістю компонентів формату двійкової послідовності опорної позиції, що зберігається у пам'яті; та призначення базовій станції опорної позиції, яка є однією з опорних позицій, що зберігаються у пам'яті, якщо опорна позиція, що зберігається у пам'яті, є узгодженою з поточною орієнтовною позицією. В оптимальному варіанті логічний контролер є сконфігурованим для виконання способу визначення опорної позиції, як визначено й описано вище. 2 UA 103782 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід також поширюється на придатний для комп'ютерного зчитування носій інформації з виконуваною програмою, яка на ньому зберігається, причому програма дає команду на логічний контролер для виконання таких етапів: перетворення двох або більшої кількості компонентів набору координат опорної позиції, що зберігається у пам'яті, на формат двійкової послідовності; перетворення двох або більшої кількості компонентів набору координат поточної орієнтовної позиції, визначеної GNSS-приймачем, на формат двійкової послідовності; узгодження поточної орієнтовної позиції з опорною позицією, що зберігається у пам'яті, шляхом узгодження двох або більшої кількості компонентів формату двійкової послідовності поточної орієнтовної позиції з двома або більшою кількістю компонентів формату двійкової послідовності опорної позиції, що зберігається у пам'яті; та призначення базовій станції опорної позиції, яка є однією з опорних позицій, що зберігаються у пам'яті, якщо опорна позиція, що зберігається у пам'яті, є узгодженою з поточною орієнтовною позицією. В оптимальному варіанті програма є сконфігурованою для надсилання команди на логічний контролер для здійснення способу визначення опорної позиції, як визначено й описано вище. Інші особливості винаходу стануть зрозумілими з представленого нижче детального опису. КОРОТКИЙ ОПИС ФІГУР Виключно для прикладу оптимальні варіанти втілення винаходу далі описуються докладніше з посиланням на супровідні фігури, серед яких: Фіг. 1 показує схематичне зображення DGPS для застосування при спрямуванні сільськогосподарського транспортного засобу, яка включає систему та спосіб згідно з поточним винаходом; Фіг. 2 показує схематичне зображення сільськогосподарського транспортного засобу, в якому застосовується DGPS з Фіг. 1; Фіг. 3 показує схематичне зображення пересувної базової станції DGPS з Фіг. 1; Фіг. 4 показує графічну схему одного варіанта втілення системи для визначення опорної позиції згідно з винаходом; Фіг. 5 показує основну блок-схему одного варіанта втілення способу визначення опорної позиції згідно з винаходом; і Фіг. 6 показує детальну схему інформаційних потоків та маніпуляцію з даними згідно з системою та способом поточного винаходу. ДЕТАЛЬНИЙ ОПИС ВИНАХОДУ Винахід описується з посиланням на DGPS для спрямування сільськогосподарського транспортного засобу, але подібним чином може бути застосований до будь-якої DGNSSсистеми. Система та спосіб визначення опорної позиції згідно з винаходом визначають опорну позицію для пересувної базової станції DGPS і призначає опорну позицію базовій станції. Фіг. 1 показує один варіант втілення сільськогосподарського транспортного засобу 10, який використовує DGPS для переміщення по земельній ділянці 12. Пересувна базова станція 100 DGPS розташовується в опорній позиції "A" поблизу від земельної ділянки 12. Інша земельна ділянка 14, яка попередньо оброблялася транспортним засобом 10, має опорну позицію "B", у якій базова станція 100 розташовувалася, коли оброблялася земельна ділянка 14. DGPS включає GPS-супутники 16, які надсилають GPS-сигнали як на базову станцію 100, так і на пересувний приймач транспортного засобу 10. Фіг. 2 показує транспортний засіб 10, який включає GPS-антену 20 та радіоантену 22. Пересувний GPS-приймач 24 транспортного засобу 10 отримує GPS-сигнали від супутників 16. Радіоприймач (не показано)отримує радіосигнали від базової станції 100, що переносить диференціальні поправкові дані. Диференціальні поправкові дані посилюють GPS-сигнали таким чином, щоб пересувний приймач 24 міг точніше розрахувати позицію. Фіг. 3 показує один варіант втілення базової станції 100. Базова станція 100 включає GPSантену 102, GPS-приймач 104, запам'ятовуючий пристрій 106, логічний контролер у формі центрального процесора 108 та радіопередавач 110, який включає радіоантену 112. Запам'ятовуючий пристрій 106 є придатним для комп'ютерного зчитування носієм інформації, який має виконувану програму, яка в ньому зберігається для надсилання команди на центральний процесор для здійснення етапів способу визначення опорної позиції, як описано нижче. По введенню у дію базова станція 100 діє для дуже точного визначення її розташування як опорної позиції шляхом визначення опорної позиції згідно з винаходом. Це може здійснюватися або шляхом миттєвого переходу до відомої опорної позиції, що зберігається у пам'яті (наприклад, позиції B), як описується більш детально з посиланням на фігури з 4 по 6, або 3 UA 103782 C2 5 10 15 20 25 30 35 40 45 50 55 шляхом розрахунку нової опорної позиції, який є загальновідомим серед спеціалістів у даній галузі. Після саморегулювання для визначення своєї опорної позиції базова станція 100 потім функціонує для визначення диференціальних поправкових даних та передачі по радіо поправкових даних на пересувний GPS-приймач 24 транспортного засобу 10. Фіг. 4 показує графічну схему базової станції 100 та потік даних між відповідними компонентами базової станції 100. Базова станція отримує GPS-сигнали від GPS-супутників 16 і передає диференціальні поправкові дані до пересувного приймача 24. Як показано на Фіг. 4, GPS-приймач 104 визначає поточну орієнтовну позицію базової станції 100 і передає дані поточної орієнтовної позиції на центральний процесор 108. Вихідні позиції зберігаються у запам'ятовуючому пристрої 106 і відшукуються центральним процесором 108 по введенню в дію для узгодження з поточною орієнтовною позицією з метою призначення опорної позиції базовій станції 100. Спосіб узгодження поточної орієнтовної позиції з опорною позицією, що зберігається у пам'яті, який виконується центральним процесором 108, в цілому описується з посиланням на Фіг. 5 і більш конкретно описується з посиланням на Фіг. 6. Відразу після того, як базовій станції 100 призначається опорна позиція, центральний процесор 108 розраховує диференціальні поправкові дані, які передаються на пересувний приймач 24 через радіопередавач 110 базової станції 100. Фіг. 5 показує блок-схему 200 основного способу визначення опорної позиції згідно з одним варіантом втілення винаходу. Згідно з цим способом, GPS-приймач 104 визначає поточну орієнтовну позицію базової станції 100, як позначено умовним номером 202. Центральний процесор 108 відшукує опорні позиції, що зберігаються у пам'яті з запам'ятовуючого пристрою 106, як позначено умовним номером 204. Поточна орієнтовна позиція та опорна позиція, що зберігаються у пам'яті, вказуються у формі трикомпонентного набору координат (X,Y,Z) геоцентричної наземної (ECEF) системи, причому точка (0,0,0) позначає центр мас землі. Набір координат включає компоненти X, Y та Z. Набір компонентів також може називатися кортежем. Кожен компонент набору координат представлено як десяткове число у його необробленій формі. Як стає зрозуміло, система ECEF дозволяє наборам координат на місцевості поверхні землі мати від'ємні компоненти. Позиції також можуть бути виражені у будь-якій іншій компонентній системі координат, відомій у даній галузі, включаючи, крім інших, інші земні системи координат, циліндричні та сферичні системи координат та геодезичні системи координат. В оптимальному варіанті втілення, як описується більш детально з посиланням на Фіг. 6, набори координат піддають маніпуляції на етапі 205 шляхом зміщення та масштабування. Компоненти кожного набору координат опорної позиції, що зберігається у пам'яті, та поточної орієнтовної позиції після цього перетворюють на формат двійкової послідовності, як позначено умовним номером 206. Компоненти піддають подальшій маніпуляції при перетворенні на формат двійкової послідовності з усуненням дробових частин компонентів. Набори координат поточної орієнтовної позиції у форматі двійкової послідовності після цього узгоджуються з наборами координат опорної позиції, що зберігаються в пам'яті, у форматі двійкової послідовності у процесі операції узгодження, яка виконується центральним процесором 108. Операція узгодження позначаєтьсяумовним номером 208 і більш детально описується з посиланням на Фіг. 6. Операція узгодження повторюється для кожної з опорних позицій, що зберігаються у пам'яті запам'ятовуючого пристрою 106, доки не знаходиться додатний відповідник. Якщо поточна орієнтовна позиція узгоджується з будь-якою з опорних позицій, що зберігаються у пам'яті, центральний процесор 208 призначає цю опорну позицію, що зберігається у пам'яті, як опорну позицію базової станції 100, як позначено умовним номером 210. Якщо відповідник не знаходиться, центральний процесор 208 розраховує нову опорну позицію на основі даних поточної орієнтовної позиції, отриманих з часом від GPS-приймача 104, як позначено умовним номером 212. Після цього центральний процесор 108 призначає нову опорну позицію як опорну позицію базової станції 100, як позначено умовним номером 214. Нова опорна позиція також зберігається як опорна позиція у запам'ятовуючому пристрої 106, як позначено умовним номером 216. Фіг. 6 показує більш докладну блок-схему 300, яка пояснює, яким чином саморегулюється базова станція 100. На Фіг. 6 етапи у способі визначення опорної позиції, які є однаковими з етапами, описаними на Фіг. 5, позначаються такими самими умовними номерами. Етап маніпуляції 205 з наборами координат більш детально розбирається на Фіг. 6. 4 UA 103782 C2 5 10 15 20 25 30 35 40 45 50 55 60 По введенню в дію GPS-приймач 104 базової станції 100 отримує GPS-сигнали від супутників 16 для визначення її поточної орієнтовної позиції, представленої як набір координат (X2, Y2, Z2), як позначено умовним номером 202. Одна з багатьох опорних позицій, що зберігаються у пам'яті, (наприклад, позиція B з Фіг. 1) представляється набором координат (X1, Y1, Z1) і зберігається у запам'ятовуючому пристрої 106 базової станції 100. Набір координат (X1, Y1, Z1) опорної позиції, що зберігається у пам'яті, відшукується у запам'ятовуючому пристрої 106, як позначено умовним номером 204. На наступному етапі забезпечується додатність компонентів набору координат (X 2, Y2, Z2) поточної орієнтовної позиції та набору координат (X 1, Y1, Z1) опорної позиції, що зберігається у 6 пам'яті, шляхом застосування зміщення додатного 8 × 10 до кожного з компонентів набору координат. Етап зміщення компонентів набору координат позначається умовним номером 302. Зміщені набори координат представляються як (X 2', Y2', Z2') та (X1', Y1', Z1'), відповідно, у яких: 6 X1' = X1+8 × 10 6 Y1' = Y1+8 × 10 6 Z1' = Z1+8 × 10 6 X2' = X2+8 × 10 6 Y2' = Y2+8 × 10 6 Z2' = Z2+8 × 10 Зміщений набір координат (X2', Y2', Z2') поточної орієнтовної позиції та зміщений набір координат (X1', Y1', Z1') опорної позиції, що зберігається у пам'яті, позначаються у блок-схемі 300 умовними номерами 304 та 306, відповідно. Ще на одному етапі компоненти кожного зі зміщених наборів координат (X 2', Y2', Z2') та (X1', Y1', Z1') масштабуються до попередньо визначеного точного значення за допомогою масштабного коефіцієнта шляхом ділення зміщених наборів координат на масштабний коефіцієнт. Масштабний коефіцієнт вибирають залежно від того, наскільки точним повинно бути узгодження між зміщеними наборами координат. Більший масштабний коефіцієнт в результаті дає зміщені набори координат, які узгоджуються легше, ніж у разі, якби масштабний коефіцієнт був меншим. Масштабовані набори координат представляються як (X 2", Y2", Z2") та (X1", Y1", Z1"), відповідно, у яких: 6 X1" = (X1+8 × 10 ) / масштабний коефіцієнт 6 Y1" = (Y1+8 × 10 ) / масштабний коефіцієнт 6 Z1" = (Z1+8 × 10 ) / масштабний коефіцієнт 6 X2" = (X2+8 × 10 ) / масштабний коефіцієнт 6 Y2" = (Y2+8 × 10 ) / масштабний коефіцієнт 6 Z2" = (Z2+8 × 10 ) / масштабний коефіцієнт Етап масштабування компонентів наборів координат позначається умовним номером 308. Масштабований набір координат (X2", Y2", Z2") поточної орієнтовної позиції та масштабований набір координат (X1", Y1", Z1") опорної позиції, що зберігається у пам'яті, позначаються умовними номерами 310 та 312, відповідно. Після цього здійснюють операцію узгодження між масштабованим набором координат (X 2", Y2", Z2") поточної орієнтовної позиції та масштабованим набором координат (X 1", Y1", Z1") опорної позиції, що зберігається у пам'яті, для того, щоб визначити, чи узгоджується поточна орієнтовна позиція з опорною позицією, що зберігається у пам'яті. Для операції узгодження компоненти набору координат спочатку перетворюють на формат двійкової послідовності (32-бітні цілі числа без знаків) з видаленням дробової частини. Перетворення на формат двійкової послідовності позначається умовним номером 206. У цьому разі виконується такий алгоритм узгодження: Якщо ((X1" XOR X2") OR (Y1" XOR Y2") OR (Z1" XOR Z2")) є 0, то позиції узгоджуються. За інших умов позиції не узгоджуються Заявником було виявлено, що вигідним є врахування однобітних змін у нульовому розряді. Таким чином, розроблено подальший оптимальний алгоритм узгодження для врахування зміни нульового розряду у кожному з компонентів, таким чином, щоб узгоджувалися компоненти, які мають лише розбіжність у нульовому розряді. Такий удосконалений алгоритм узгодження, який має виконуватися, представлено нижче: Пересвідчитися, що X1" є меншим за X2", Y1" є меншим за Y2", і Z1" є меншим за Z2". Якщо X1" > X2", то міняють місцями (X1", X2") Якщо Y1" > Y2"", то міняють місцями (Y1", Y2") 5 UA 103782 C2 5 10 15 20 25 30 35 40 45 50 55 60 Якщо Z1" > Z2"", то міняють місцями (Z1", Z2") До кожної пари компонентів застосовується XOR (виключне АБО) для виявлення будь-яких розбіжностей, і до результатів після цього застосовується логічна функція OR. Це здійснюється для кожної можливої зміни нульового розряду: Якщо ((X1" XOR X2") OR (Y1" XOR Y2") OR (Z1" XOR Z2")) є 0, то позиції узгоджуються Також якщо ((X1" XOR X2") OR (Y1" XOR Y2") OR (Z1" + 1 XOR Z2")) є 0, то позиції узгоджуються Також якщо ((X1" XOR X2") OR (Y1" + 1 XOR Y2") OR (Z1" XOR Z2")) є 0, то позиції узгоджуються Також якщо ((X1" XOR X2") OR (Y1" + 1 XOR Y2") OR (Z1" + 1 XOR Z2")) є 0, то позиції узгоджуються Також якщо ((X1" + 1 XOR X2") OR (Y1" XOR Y2") OR (Z1" XOR Z2")) є 0, то позиції узгоджуються Також якщо ((X1" + 1 XOR X2") OR (Y1" XOR Y2") OR (Z1" + 1 XOR Z2")) є 0, то позиції узгоджуються Також якщо ((X1" + 1 XOR X2") OR (Y1" + 1 XOR Y2") OR (Z1" XOR Z2")) є 0, то позиції узгоджуються Також якщо ((X1" + 1 XOR X2") OR (Y1" + 1 XOR Y2") OR (Z1" + 1 XOR Z2")) є 0, то позиції узгоджуються За інших умов позиції не узгоджуються Операція узгодження позначається умовним номером 208 на блок-схемах 200 та 300. Якщо набір координат (X2", Y2", Z2") поточної орієнтовної позиції та набір координат (X 1", Y1", Z1") опорної позиції, що зберігається у пам'яті, узгоджуються згідно з представленим вище алгоритмом узгодження, базовій станції 100 призначається набір координат опорної позиції, що зберігається у пам'яті, як опорна позиція. Це також можна визначити як миттєвий перехід до опорної позиції, що зберігається у пам'яті, і ця операція позначається умовним номером 210 на блок-схемах 200 та 300. Якщо набір координат (X2", Y2", Z2") поточної орієнтовної позиції не узгоджується з жодним з наборів координат (X1", Y1", Z1") опорної позиції, що зберігається у пам'яті, базова станція 100 розраховує нову опорну позицію, як позначено умовним номером 212. Нову опорну позицію розраховують, взявши кількість поточних орієнтовних позицій за попередньо визначений період часу і розраховуючи опорну позицію за період часу. Недолік полягає в тому, що базова станція не є відразу доступною для розрахунку та передачі диференціальних поправкових даних під час визначення нової опорної позиції. Слід зазначити, що зазвичай існує багато наборів координат опорної позиції, що зберігається у пам'яті запам'ятовуючого пристрою 106 базової станції 100, на якій здійснюється вищезазначена операція узгодження для того, щоб визначити, чи існує набір координат узгодженої опорної позиції. Для подальшого пояснення винаходу нижче представлено один приклад операції узгодження, яка виконується між гіпотетичною поточною орієнтовною позицією та гіпотетичною опорною позицією, що зберігається у пам'яті. У цьому прикладі: опорною позицією, що зберігається у пам'яті, є: (1002712,-4598060, 4290846); і поточною орієнтовною позицією є: (993236,-4590107, 4301406). 6 Компоненти зміщуються на 8 × 10 таким чином, що: зміщеною опорною позицією, що зберігається у пам'яті, є (9002712, 3401940, 12290846); і зміщеною поточною орієнтовною позицією є: (8993236, 3409893, 12301406). За умови, що бажана точність становить 0,5 м, компоненти масштабують з масштабним коефіцієнтом 0,5 таким чином, що: масштабованою опорною позицією, що зберігається у пам'яті, є (18005424, 6803880, 24581692); і масштабованою поточною орієнтовною позицією є: (17986472, 6819786, 24602812). Компоненти набору координат після цього перетворюють на формат двійкової послідовності з видаленням дробових частин таким чином, що: двійковою опорною позицією, що зберігається у пам'яті, є: (00000001-00010010-10111101-10110000, 00000000-01100111-11010001-10101000, 00000001-01110111-00010110-00111100); і двійковою поточною орієнтовною позицією є: 6 UA 103782 C2 5 10 15 20 25 30 35 40 45 50 (00000001-00010010-01110011-10101000, 00000000-01101000-00001111-11001010, 00000001-01110111-01101000-10111100). Після цього набори координат узгоджують згідно з алгоритмом узгодження. Для описаного прикладу поточна орієнтовна позиція не відповідає опорній позиції, що зберігається у пам'яті, а отже, випробується наступна опорна позиція, що зберігається у пам'яті. У варіанті втілення, який є альтернативним, але у даному разі не розглядається як оптимальний, алгоритм узгодження передбачає XOR для кожної пари компонентів для виявлення будь-яких розбіжностей, а потім до результатів застосовується логічна функція OR. Потім до цього результату застосовується логічна функція AND з маскою M. Якщо ((X1" XOR X2") OR (Y1" XOR Y2") OR (Z1" XOR Z2")) AND M є 0, то позиції узгоджуються За інших умов позиції не узгоджуються Однак ця перевірка є невдалою, якщо існує різниця в одному з розрядів у межах маски, що спричинює відповідну зміну у верхніх розрядах. Наприклад: 16 відповідає 0001 0000 у бінарній системі, а 15 відповідає 0000 1111. Якщо маска M складає 15 (тобто, якщо дві позиції перебувають на відстані, меншій за 15 м, то узгоджуються), то перевірка у цьому разі є невдалою. Для її застосування необхідно враховувати будь-які зміни у розрядах, які можуть траплятись у маскованих компонентах. Для великої маски в результаті вимагається велика кількість розрахунків. Немає необхідності в узгодженні всіх компонентів X, Y та Z, і Заявник передбачає, що у деяких випадках застосування можуть узгоджуватися лише два компоненти. В альтернативному варіанті різні компоненти можуть бути масштабовані по-різному, і, таким чином, різні компоненти узгоджуються з різною легкістю. У деяких наборах координат це дозволяє більший допуск для узгодження за висотою, ніж для узгодження за довготою та широтою. В іншому варіанті втілення винаходу застосовують алгоритм контрольних сум для виконання операції узгодження між опорними позиціями, що зберігаються у пам'яті, та поточною орієнтовною позицією. Компоненти наборів координат спочатку перетворюються на 32-бітні цілі 6 числа без знаків (з видаленням дробової частини). Після цього додається зміщення 8 × 10 до кожного компонента для гарантування додатності всіх компонентів. Кожен компонент округлюється до найближчого кратного потрібного точного значення. Потім компоненти для кожного набору координат перетворюють на двійкову послідовність і з'єднують для утворення єдиної двійкової послідовності. Під час цього перетворення послідовності (які відповідають компонентові) скорочують для досягнення потрібної точності. Наприклад, видалення 3-х найменш значущих розрядів в результаті у найгіршому випадку дає точність ~12,1 метра. Після цього виконують контрольне сумування на з'єднаній двійковій послідовності, в результаті чого отримують контрольну суму поточної орієнтовної позиції. Базова станція 100, після визначення контрольної суми її поточної орієнтовної позиції, визначає контрольні суми відповідної опорної позиції, що зберігається у пам'яті. Якщо знаходиться узгоджена контрольна сума у списку опорних позицій, що зберігаються у пам'яті, ця опорна позиція, що зберігається у пам'яті, використовується як опорна позиція для базової станції 100. Метою опису було розкриття даного винаходу без обмеження цього винаходу будь-яким варіантом втілення або конкретним набором особливостей. Спеціалісти у даній галузі зможуть реалізувати варіанти на основі конкретних прикладів втілення, які все ж охоплюються обсягом даного винаходу. Наприклад, опорні позиції, що зберігаються у пам'яті, можуть зміщуватись і зберігатись як зміщені набори координат, зміщені й масштабовані набори координат або зміщені й масштабовані набори координат, які було перетворено на 32-бітні цілі числа без знаків. Етапи маніпуляції зі зміщенням та масштабуванням можуть відбуватися після перетворення компонентів на формат двійкової послідовності. ФОРМУЛА ВИНАХОДУ 55 1. Спосіб визначення опорної позиції для базової станції DGNSS, причому спосіб включає етапи: i) визначення поточної орієнтовної позиції базової станції як певної кількості компонентів набору координат за допомогою GNSS-приймача; 7 UA 103782 C2 5 10 15 20 25 30 35 40 45 50 55 ii) відшукування опорної позиції, що зберігається у пам'яті, з-поміж однієї або кількох опорних позицій, що зберігаються у пам'яті базової станції, як певної кількості компонентів набору координат; iii) перетворення двох або більшої кількості компонентів кожного з набору координат опорної позиції, що зберігається у пам'яті, та поточної орієнтовної позиції на формат двійкової послідовності; iv) узгодження поточної орієнтовної позиції з опорною позицією, що зберігається у пам'яті, шляхом узгодження двох або більшої кількості компонентів формату двійкової послідовності поточної орієнтовної позиції з двома або більшою кількістю компонентів формату двійкової послідовності опорної позиції, що зберігається у пам'яті; та v) призначення базовій станції опорної позиції, яка є однією з опорних позицій, що зберігаються у пам'яті, якщо опорна позиція, що зберігається у пам'яті, є узгодженою з поточною орієнтовною позицією в операції узгодження. 2. Спосіб за п. 1, який відрізняється тим, що усі з компонентів кожного з набору координат опорної позиції, що зберігається у пам'яті, та поточної орієнтовної позиції перетворюються на формат двійкової послідовності. 3. Спосіб за п. 1, який відрізняється тим, що усі з компонентів формату двійкової послідовності поточної орієнтовної позиції узгоджуються з компонентами формату двійкової послідовності опорної позиції, що зберігається у пам'яті. 4. Спосіб за п. 1, який відрізняється тим, що узгодження поточної орієнтовної позиції з опорною позицією, що зберігається у пам'яті, включає узгодження кожного компонента набору координат формату двійкової послідовності поточної орієнтовної позиції з відповідним компонентом набору координат формату двійкової послідовності опорної позиції, що зберігається у пам'яті. 5. Спосіб за п. 1, який відрізняється тим, що спосіб включає етап маніпуляції одним або обома з наборів координат опорної позиції, що зберігається у пам'яті, та поточної орієнтовної позиції перед узгодженням компонентів наборів координат. 6. Спосіб за п. 1, який відрізняється тим, що спосіб включає етап розрахунку нової опорної позиції та призначення базовій станції нової опорної позиції, якщо жодна з опорних позицій, що зберігаються у пам'яті, не є узгодженою з поточною орієнтовною позицією. 7. Спосіб за п. 6, який відрізняється тим, що спосіб включає етап зберігання нової опорної позиції у пам'яті базової станції як опорної позиції, що зберігається у пам'яті. 8. Спосіб за п. 5, який відрізняється тим, що маніпуляція з наборами координат включає зміщення компонентів наборів координат на фіксовану величину для забезпечення того, щоб набори координат включали лише додатні компоненти. 9. Спосіб за п. 5, який відрізняється тим, що маніпуляція з наборами координат включає масштабування компонентів наборів координат. 10. Спосіб за п. 8, який відрізняється тим, що компоненти наборів координат масштабують після зміщення компонентів. 11. Спосіб за п. 9 або 10, який відрізняється тим, що масштабування наборів координат включає ділення кожного з компонентів на масштабний коефіцієнт. 12. Спосіб за п. 1, який відрізняється тим, що узгодження компонентів наборів координат включає врахування зміни нульового розряду у кожному з компонентів таким чином, щоб узгоджувалися компоненти, які мають різницю лише у нульовому розряді. 13. Спосіб за п. 1, який відрізняється тим, що узгодження поточної орієнтовної позиції з опорною позицією, що зберігається у пам'яті, включає: конкатенацію компонентів формату двійкової послідовності кожної поточної орієнтовної позиції та опорної позиції, що зберігається у пам'яті; виконання алгоритму контрольних сум на конкатенованих компонентах формату двійкової послідовності для визначення контрольної суми позиції для кожної поточної орієнтовної позиції та опорної позиції, що зберігається у пам'яті; та порівняння контрольних сум позицій для визначення узгодження. 14. Система для визначення опорної позиції, яка включає базову станцію DGNSS, яка включає: Запам'ятовуючий пристрій для зберігання однієї або кількох опорних позицій, що зберігаються у пам'яті, як набори координат, що включають компоненти; GNSS-приймач для визначення поточної орієнтовної позиції базової станції як набір координат, що включає компоненти; та логічний контролер, який діє для: 8 UA 103782 C2 5 10 15 20 перетворення двох або більшої кількості компонентів кожного з наборів координат опорної позиції, що зберігається у пам'яті, та поточної орієнтовної позиції на формат двійкової послідовності; узгодження поточної орієнтовної позиції з опорною позицією, що зберігається у пам'яті, шляхом узгодження двох або більшої кількості компонентів формату двійкової послідовності поточної орієнтовної позиції з двома або більшою кількістю компонентів формату двійкової послідовності опорної позиції, що зберігається у пам'яті; та призначення базовій станції опорної позиції, яка є однією з опорних позицій, що зберігаються у пам'яті, якщо опорна позиція, що зберігається у пам'яті, є узгодженою з поточною орієнтовною позицією. 15. Придатний для комп'ютерного зчитування носій інформації з виконуваною програмою, яка на ньому зберігається, який відрізняється тим, що програма дає команду на логічний контролер для виконання таких етапів: перетворення двох або більшої кількості компонентів набору координат опорної позиції, що зберігається у пам'яті, на формат двійкової послідовності; перетворення двох або більшої кількості компонентів набору координат поточної орієнтовної позиції, визначеної GNSS-приймачем, на формат двійкової послідовності; узгодження поточної орієнтовної позиції з опорною позицією, що зберігається у пам'яті, шляхом узгодження двох або більшої кількості компонентів формату двійкової послідовності поточної орієнтовної позиції з двома або більшою кількістю компонентів формату двійкової послідовності опорної позиції, що зберігається у пам'яті; та призначення базовій станції опорної позиції, яка є однією з опорних позицій, що зберігаються у пам'яті, якщо опорна позиція, що зберігається у пам'яті, є узгодженою з поточною орієнтовною позицією. 9 UA 103782 C2 10 UA 103782 C2 11 UA 103782 C2 12 UA 103782 C2 Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 13
ДивитисяДодаткова інформація
Назва патенту англійськоюA system and method of reference position determination
Автори російськоюMcmanus, Ian
МПК / Мітки
Мітки: опорної, позиції, визначення, спосіб, система
Код посилання
<a href="https://ua.patents.su/15-103782-sistema-ta-sposib-dlya-viznachennya-oporno-pozici.html" target="_blank" rel="follow" title="База патентів України">Система та спосіб для визначення опорної позиції</a>
Спосіб визначення координат вогневої позиції артилерійської гармати
Номер патенту: 64729
Опубліковано: 10.11.2011
Автори: Петін Олександр Петрович, Курбан Володимир Арсенійович, Куровська Тетяна Юріївна, Огороднийчук Микола Дмитрович, Щербина Володимир Миколайович, Ткаченко Антон Анатолійович
МПК: G01S 3/78
Мітки: артилерійської, координат, спосіб, гармати, вогневої, визначення, позиції
Формула / Реферат:
Спосіб визначення координат вогневої позиції артилерійської гармати, при якому виконують огляд району бойових дій, виявляють спалах пострілу гармати, фіксують момент появи спалаху пострілу гармати за допомогою секундоміра, визначають напрямок спалаху пострілу гармати, фіксують момент надходження звуку пострілу гармати за допомогою секундоміра, визначають час затримки звуку пострілу після фіксації моменту появи спалаху пострілу, розраховують...
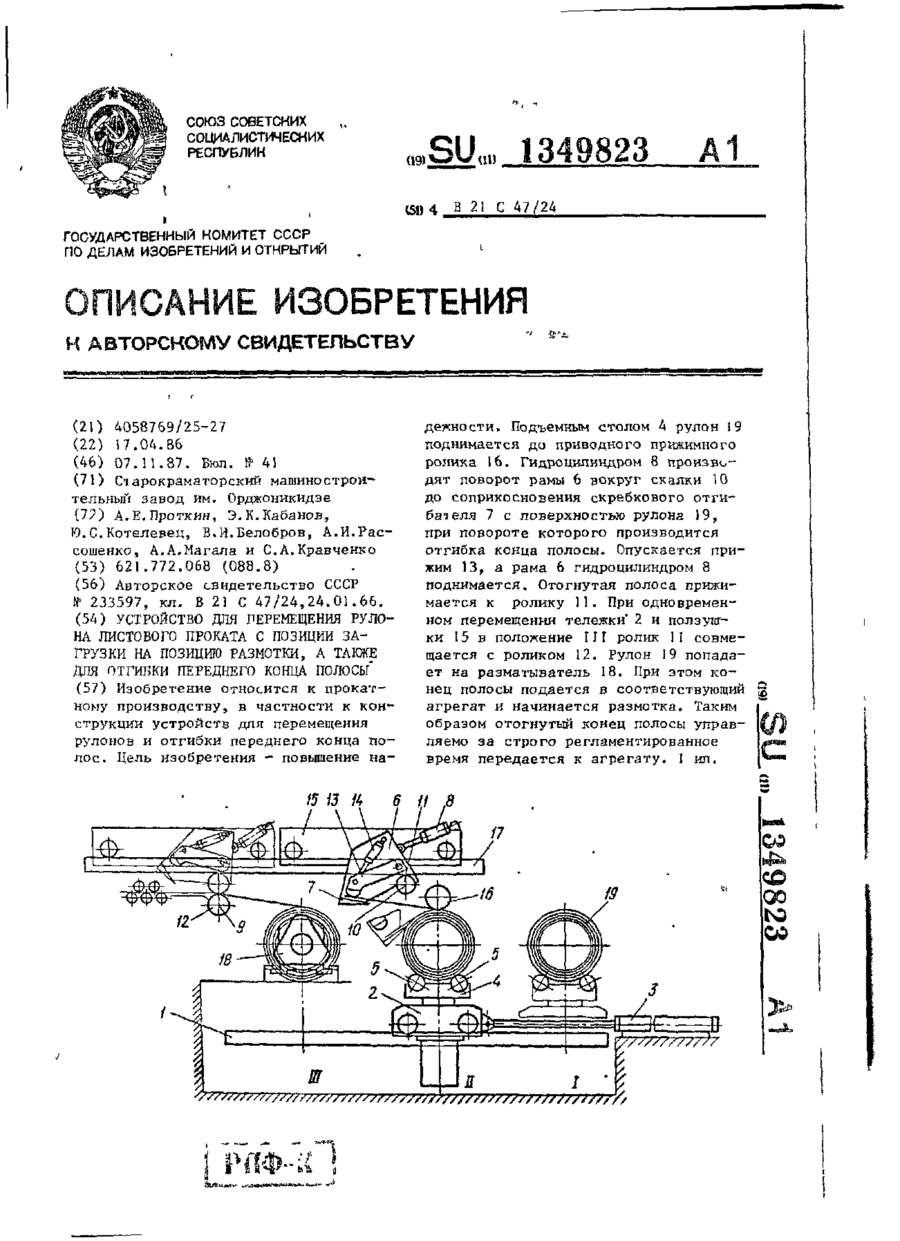
Пристрій для переміщення рулону листового прокату з позиції завантаження до позиції розмотки, а також для відгинання переднього кінця стрічки
Номер патенту: 16146
Опубліковано: 29.08.1997
Автори: Магала Олександр Андрійович, Кравченко Сергій Олексійович, Кабанов Едуард Констянтинович, Котелевець Юрій Сергійович, Білобров Володимир Іванович, Проткін Олексій Єгорович, Рассошенко Анатолій Іванович
МПК: B21C 47/24
Мітки: переміщення, пристрій, рулону, стрічки, також, відгинання, розмотки, завантаження, кінця, позиції, прокату, листового, переднього
Формула / Реферат:
Устройство для перемещения рулона листового проката с позиции загрузки на позицию размотки, а также для отгибки переднего конца полосы, содержащее смонтированную на направляющих приводную тележку с подъемным столом и опорными приводными роликами, раму со скребковым отгибателем, привод перемещения рамы в виде цилиндра, скалки с размещенными на них верхним и нижним задающими роликами, а также прижим и цилиндр привода перемещения...
Спосіб побудови геодезичної опорної фігури

Номер патенту: 82874
Опубліковано: 27.08.2013
Автори: Терещук Олексій Іванович, Бурачек Всеволод Германович, Нисторяк Іван Олександрович
МПК: G01C 7/00
Мітки: опорної, побудови, фігури, геодезичної, спосіб
Формула / Реферат:
Спосіб побудови геодезичної опорної фігури, що включає комплексне визначення координат вершин геодезичної фігури (наприклад, трикутника) засобами GNSS та вимірювання довжин сторін цієї фігури світловіддалеміром тахеометра, який відрізняється тим, що для побудованої за даними світловіддалемірних вимірювань фігури визначають зрівноважене положення її вершин щодо вершин фігури з визначеними координатами засобами GNSS за критерієм методу...
Система для визначення координат та швидкості рухомого об’єкта
Номер патенту: 69200
Опубліковано: 16.08.2004
Автори: Савченко Віталій Анатолійович, Мосов Сергій Петрович, Кравченко Юрій Васильович, Машков Олег Альбертович
МПК: G01S 5/02
Мітки: координат, визначення, система, рухомого, об'єкта, швидкості
Формула / Реферат:
Система для визначення координат та швидкості рухомого об'єкта, що містить приймач радіонавігаційних сигналів, встановлений на рухомому об'єкті, та мережу випромінювачів радіонавігаційних сигналів, встановлених на навігаційних космічних апаратах, яка відрізняється тим, що система додатково містить радіонавігаційну станцію, встановлену на літальному апараті, яка включає приймач, блок обробки та випромінювач радіонавігаційних сигналів.
Спосіб визначення стану твердіння осьової зони і/або нижнього кінця рідкої фази у заготовці при безперервному литті металевих матеріалів, зокрема сталі, і сегмент опорної роликової системи для його здійснення
Номер патенту: 83551
Опубліковано: 25.07.2008
Автор: Вейєр Аксель
МПК: B22D 11/128, B22D 11/16, B21B 37/00, B22D 11/12
Мітки: роликової, спосіб, здійснення, безперервному, осьової, визначення, матеріалів, зони, кінця, литті, нижнього, сталі, системі, сегмент, твердіння, фазі, металевих, рідкої, заготовці, опорної, стану, зокрема
Формула / Реферат:
1. Спосіб визначення стану твердіння осьової зони і/або положення нижнього кінця рідкої фази у заготовці при безперервному литті металевих матеріалів, зокрема сталі, у роликовому сегменті (1) опорної роликової системи (2), в якій положення верхньої рами (3), яка несе верхні ролики (4), регулюють за допомогою розташованих у кутах (5а, 5b, 5с, 5d) багатокутника гідравлічних циліндропоршневих блоків (6) відносно положення нижньої рами (7), яка...
Попередній патент: Спосіб виготовлення гранульованого препарату активних інгредієнтів та гранульоваий препарат, одержаний таким способом
Наступний патент: Генератор нормального розподілу
Випадковий патент: Пристрій утилізації боєприпасів шляхом підриву з отриманням електричної енергії