Спосіб побудови геодезичної опорної фігури
Номер патенту: 82874
Опубліковано: 27.08.2013
Автори: Терещук Олексій Іванович, Нисторяк Іван Олександрович, Бурачек Всеволод Германович



Формула / Реферат
Спосіб побудови геодезичної опорної фігури, що включає комплексне визначення координат вершин геодезичної фігури (наприклад, трикутника) засобами GNSS та вимірювання довжин сторін цієї фігури світловіддалеміром тахеометра, який відрізняється тим, що для побудованої за даними світловіддалемірних вимірювань фігури визначають зрівноважене положення її вершин щодо вершин фігури з визначеними координатами засобами GNSS за критерієм методу найменших квадратів [n2]®min, при цьому координати вершини уточненої фігури визначають як середньозрівноважені значення вищезгаданих вершин фігур.
Текст
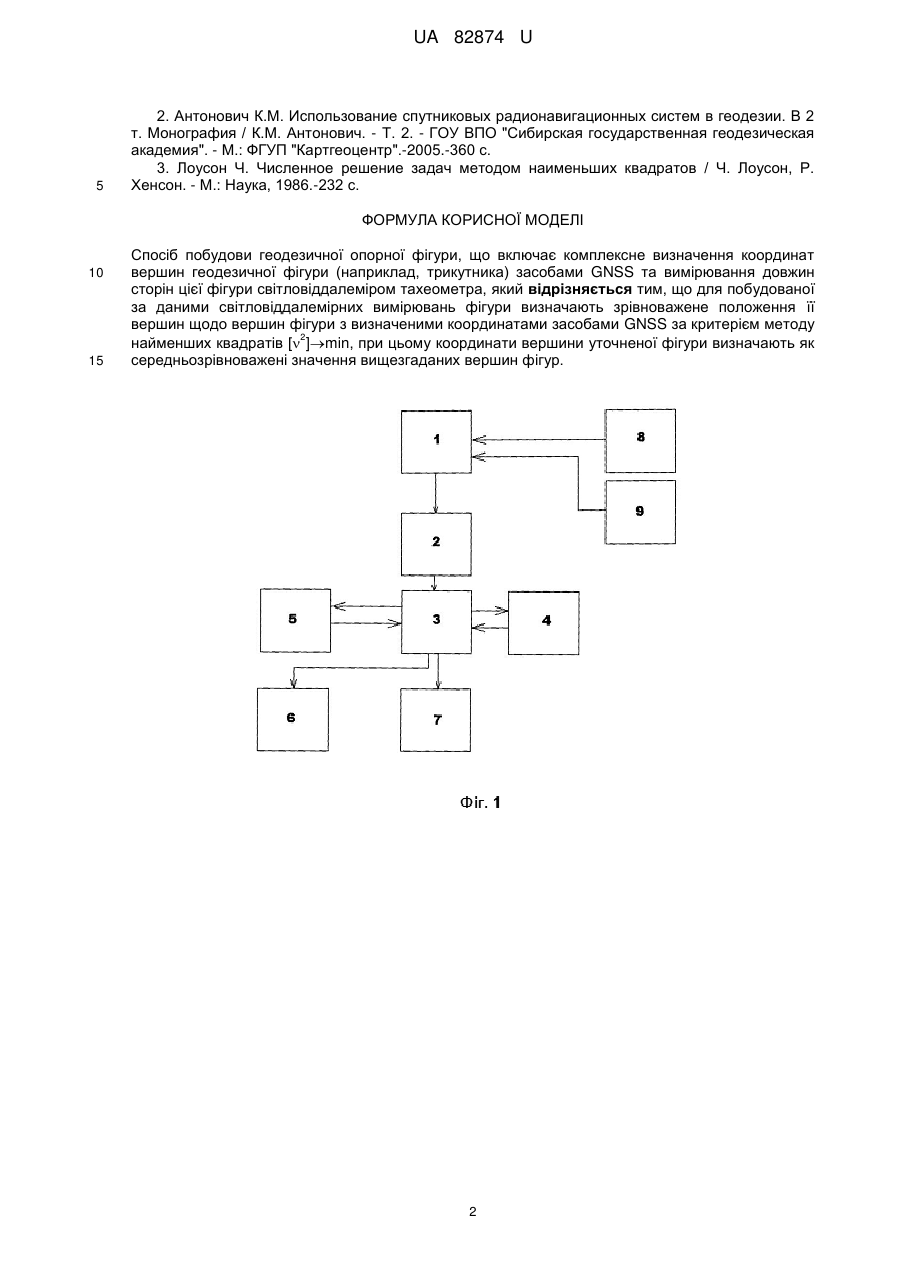
Реферат: UA 82874 U UA 82874 U 5 10 15 20 25 30 35 40 45 50 55 Запропонований спосіб належить до області геодезії, зокрема до методів визначення координат точок на місцевості. Відомі основні способи побудови опорних базисів: методами тріангуляції, полігонометрії, трилатерації та ін. [1, С. 91-121]. Загальними недоліками цих методів є залежність від розвиненої геодезичної мережі; супутниковий метод, недоліком якого є недостатньо висока точність визначення координат точок [2, С. 108-136]. Як найближчий аналог прийнятий спосіб побудови опорної мережі супутниковим методом за допомогою системи GPS [2, С. 108-136]. Задачею корисної моделі є створення способу побудови геодезичної опорної фігури, оптимальної з точки зору отриманої точності координат її вершин. Поставлена задача вирішується за рахунок створення способу побудови геодезичної опорної фігури, заснованого на комплексному визначенні координат вершин геодезичної фігури (наприклад, трикутника) засобами GNSS та вимірюванні довжин сторін цієї фігури світловіддалеміром тахеометра, який відрізняється тим, що для побудованої за даними світловіддалемірних вимірювань фігури визначається зрівноважене положення її вершин щодо вершин фігури з визначеними координатами засобами GNSS за критерієм методу найменших квадратів [3], при цьому координати вершини уточненої фігури визначають як середньозрівноважені значення вищезгаданих вершин фігур. Технічним результатом є отримання координат вершин фігури з підвищеною точністю. Запропонований спосіб може бути реалізований відповідно до блок-схеми, яка зображена на фіг. 1 1) блок введення інформації; 2) блок формування вихідного положення фігури; 3) блок орієнтування фігури; 4) блок оцінки зрівноваження фігури; 5) блок пам'яті; 6) блок запису та зберігання інформації; 7) блок індикації; 8) прилад - GNSS-приймач; 9) прилад - електронний тахеометр. На фіг. 2 зображено схема побудови геодезичної фігури, де: ABC - фігура, побудована з точок, координати яких отримані за допомогою GNSS; А'В'С - фігура, побудована за допомогою вимірювань електронним тахеометром; АА', ВВ', СС - величини нев'язок, отриманих з даних вимірювань GNSS та електронного 2 тахеометра. При цьому позначимо, що АА'=1, BB'=2, CC'=3, a [ ] - сума квадратів величин нев'язок. Запропонований спосіб реалізується наступним чином: На вхід блока введення інформації 1 передаються дані вимірювань з GNSS приймача 8 та електронного тахеометра 9. Після цього інформація через блок формування вихідного положення фігури 2, де відбувається побудова фігури на основі даних з блоків 8 та 9, потрапляє у блок орієнтування фігури 3. Блок 3 формує початкову орієнтацію фігури, передає ці дані у блок 4 та надсилає запит на оцінку зрівноваження фігури. Після цього блок 4 проводить оцінку 2 положення фігури на предмет зрівноваженого положення за формулою [ ]min. Далі результат передається в блок 3, де формується величина та знак зміни орієнтування фігури та виконується орієнтування фігури на величину k. Величина к для кожного кроку зрівноваження 1max знаходиться за формулою k max , де max та 1max - дві з трьох найбільші величини 1 n нев'язки, a n - номер кроку. Після цього блок 3 передає нові дані в блок 4 та надсилає новий запит на оцінку зрівноваження фігури. Блок 4 в черговий раз проводить оцінку положення фігури на предмет рівноважного положення. Одночасно з оцінкою положення фігури дані зберігаються 2 в блоці пам'яті 5. У випадку, коли орієнтування фігури задовольняє умови рівноваги [ ]→min, дані з блока 3 передаються в блок запису та зберігання інформації 6 та до блока індикації 7, де фіксується інформація про кінцеве положення фігури та зрівняні координати її вершин. Таким чином, запропонований спосіб побудови геодезичної опорної фігури дозволяє суттєво підвищити точність отримуваних координат вершин фігури за рахунок комплексного використання світловіддалемірного і GNSS-методів та обробці отриманих даних. Джерела інформації: 1. Островський А.Л. Геодезія, частина II [Підручник для вузів] / Мороз О.І., Островський А.Л., Тарнавський В.Л. - Львів: НУ "Львівська політехніка", 2007.-508 с. 1 UA 82874 U 5 2. Антонович К.М. Использование спутниковых радионавигационных систем в геодезии. В 2 т. Монография / К.М. Антонович. - Т. 2. - ГОУ ВПО "Сибирская государственная геодезическая академия". - М.: ФГУП "Картгеоцентр".-2005.-360 с. 3. Лоусон Ч. Численное решение задач методом наименьших квадратов / Ч. Лоусон, Р. Хенсон. - М.: Наука, 1986.-232 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 Спосіб побудови геодезичної опорної фігури, що включає комплексне визначення координат вершин геодезичної фігури (наприклад, трикутника) засобами GNSS та вимірювання довжин сторін цієї фігури світловіддалеміром тахеометра, який відрізняється тим, що для побудованої за даними світловіддалемірних вимірювань фігури визначають зрівноважене положення її вершин щодо вершин фігури з визначеними координатами засобами GNSS за критерієм методу 2 найменших квадратів [ ]min, при цьому координати вершини уточненої фігури визначають як середньозрівноважені значення вищезгаданих вершин фігур. 2 UA 82874 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for plotting a geodesic reference figure
Автори англійськоюBurachek Vsevolod Hermanovych, Nystoriak Ivan Oleksandrovych, Tereschuk Oleksii Ivanovych
Назва патенту російськоюСпособ построения геодезической опорной фигуры
Автори російськоюБурачек Всеволод Германович, Нисторяк Иван Александрович, Терещук Алексей Иванович
МПК / Мітки
МПК: G01C 7/00
Мітки: побудови, спосіб, опорної, геодезичної, фігури
Код посилання
<a href="https://ua.patents.su/5-82874-sposib-pobudovi-geodezichno-oporno-figuri.html" target="_blank" rel="follow" title="База патентів України">Спосіб побудови геодезичної опорної фігури</a>
Спосіб згущення геодезичної мережі
Номер патенту: 93119
Опубліковано: 10.01.2011
Автори: Байса Дмитро Федорович, Крельштейн Петро Давидович, Боровий Валентин Олександрович, Крячок Сергій Дмитрович, Бурачек Всеволод Германович
МПК: G01C 7/00
Мітки: спосіб, мережі, геодезичної, згущення
Формула / Реферат:
Спосіб згущення геодезичної мережі, який включає геодезичну прив'язку пунктів мережі згущення за допомогою полігонометричних ходів до пунктів опорної мережі, що утворюють певні геометричні фігури, який відрізняється тим, що пункти мережі згущення будують в зонах центральних точок геодезичних фігур опорної мережі та визначають координати пунктів мережі згущення шляхом зустрічних лінійних засічок по довжинах замикаючих світловіддалемірних...
Спосіб побудови технічного ескізу гармонійної фігури жінки
Номер патенту: 57226
Опубліковано: 16.06.2003
Автори: Славінська Алла Людвігівна, Гладун Оксана Петрівна
МПК: A41H 3/00
Мітки: побудови, гармонійної, ескізу, фігури, спосіб, технічного, жінки
Формула / Реферат:
1. Спосіб побудови технічного ескізу гармонійної фігури жінки, який грунтується на розрахунку проекційних розмірів фігури за числовим рядом Фібоначі, який відрізняється тим, що умовні розміри узагальненої гармонійної фігури обчислюють як суму або різницю конструктивних чисел ряду Фібоначі, а абсолютні розміри конкретної фігури - як добуток умовних розмірів узагальненої гармонійної фігури та коефіцієнта пропорційності згідно з...
Спосіб та пристрій для геодезичної прив’язки аерокосмічних знімків
Номер патенту: 90826
Опубліковано: 25.05.2010
Автори: Беленок Вадим Юрійович, Крячок Сергій Дмитрович, Зацерковний Віталій Іванович, Бурачек Всеволод Германович, Крельштейн Петро Давидович
МПК: G01C 11/00
Мітки: прив'язки, спосіб, геодезичної, аерокосмічних, пристрій, знімків
Формула / Реферат:
1. Спосіб геодезичної прив'язки аерокосмічних знімків, заснований на субпіксельній технології, який відрізняється тим, що виконують оптико-електронну цифрову зйомку поверхні об'єкта з багатосекторними опорними геодезичними знаками, після чого для кожного зображення знаків вибирають дві пари діаметрально протилежних секторних фігур, медіани яких утворюють якнайменші кути відхилення з лініями стовпців і рядків мішені матричного фотоприймача,...
Спосіб визначення висотного положення точок геодезичної кінематичної мережі
Номер патенту: 47168
Опубліковано: 17.06.2002
Автор: Третяк Корнилій Романович
МПК: G01C 5/00
Мітки: висотного, спосіб, геодезичної, мережі, положення, визначення, точок, кінематичної
Формула / Реферат:
Спосіб визначення висотного положення точок геодезичної кінематичної мережі, який заключається у проведенні циклів спостережень висотного положення точок геодезичної кінематичної мережі, кожний з яких включає встановлення приладів для нівелювання на точках мережі і у технологічно необхідних місцях та вимірювання перевищень між точками з наступним урівноваженням висот точок, який відрізняється тим, що при урівноваженні висот точок мережі...
Пристрій для обміру фігури людини
Номер патенту: 1233
Опубліковано: 15.05.2002
Автор: Рудяченко Олена Валеріївна
МПК: A41H 1/00
Мітки: пристрій, фігури, людини, обміру
Формула / Реферат:
Пристрій для обміру фігури людини, що містить засіб обміру, який відрізняється тим, що засіб обміру включає дві надрізані через інтервали 3-5 см сантиметрових стрічки і пружну плоску стрічку з повздовжнім прорізом, причому сантиметрові стрічки розташовані поряд зі зміщенням на половину інтервалу в прорізі.
Попередній патент: Наповнювач для продуктів геродієтичного харчування
Наступний патент: Пристрій для освітлення шкали мікрометра й лімбів кутомірних геодезичних приладів
Випадковий патент: Спосіб булоплікації лінії шва при резекції булл у хворих на генералізовану бульозну емфізему легень