Автоматизована система аналізу дотримання правил дорожнього руху, виявлення причин виникнення дорожньо-транспортних пригод і контролю користування платними ділянками
Номер патенту: 106291
Опубліковано: 11.08.2014
Автори: Лук'янова Ольга Олексіївна, Дохов Олександр Іванович, Грінченко Олена Володимирівна, Галевич Максим Миколайович, Лук'янов Олександр Михайлович
Формула / Реферат
Автоматизована система аналізу дотримання правил дорожнього руху, виявлення причин виникнення дорожньо-транспортних пригод і контролю користування платними ділянками, що включає в себе центр збору і обробки інформації, центри поширення інформації, багатофункціональну автомобільну бортову апаратуру і переносні апаратно-програмні модулі, причому до складу центру збору і обробки інформації входять: приймальний пристрій, блок екстреного реагування, блок формування формалізованих правил дорожнього руху, блок оброблення даних автомобільної апаратури, база даних і блок електроживлення; до складу кожного переносного модуля входять: пристрій для зчитування даних, переносний комп'ютер, блок електроживлення і передавальний пристрій; а до складу багатофункціональної автомобільної бортової апаратури входять: GPS/GNSS-приймач, блок розподілу потоків даних, блок обчислення параметрів руху, блок контролю параметрів руху, блок формування критеріїв аналізу, приймальний пристрій, блок тимчасового зберігання інформації, блок керування, блок індикації факту порушення правил дорожнього руху, запам'ятовуючий блок, передавальний пристрій, блок електроживлення і блок реагування на ДТП, що складається з блока формування повідомлення про ДТП, блока індикації факту виникнення ДТП і блока додаткового контролю, яка відрізняється тим, що центр збору і обробки інформації додатково включає в себе блок контролю користування платними ділянками, кожен переносний апаратно-програмний модуль додатково включає в себе GPS/GNSS-приймач, а багатофункціональна автомобільна бортова апаратура додатково включає в себе блок обліку користування платними ділянками і блок індикації перебування на платній ділянці, і при цьому центр збору і обробки інформації з'єднаний із входами мережі центрів поширення інформації, кожен центр поширення інформації передає дані багатофункціональній автомобільній бортовій апаратурі, у якій ці дані надходять на вхід приймального пристрою, вихід якого з'єднаний з першим входом блока формування критеріїв аналізу, другий вхід і перший вихід якого з'єднані з першими виходом і входом блока контролю параметрів руху, а вихід GPS/GNSS-приймача через блок розподілу потоків даних з'єднаний з першим входом блока тимчасового зберігання інформації і входом блока обчислення параметрів руху, перший вихід якого з'єднаний з другим входом блока контролю параметрів руху, а другий вихід - з другим входом блока тимчасового зберігання інформації, першими входом і виходом блок керування з'єднаний з виходом і третім входом блока тимчасового зберігання інформації, другими виходом і входом - із входом і виходом запам'ятовуючого блока, третіми виходом і входом - з першими входом і виходом блока формування повідомлення про ДТП, що входить до складу блока реагування на ДТП і з'єднаний другим виходом з першим входом передавального пристрою, що служить для передачі даних до центру збору і обробки інформації, четвертими виходом і входом блок керування з'єднаний з третім входом і другим виходом блока формування критеріїв аналізу, п'ятим входом - з другим виходом блока контролю параметрів руху, п'ятим виходом - із входом блока індикації факту порушення правил дорожнього руху, шостим виходом - із входом блока індикації перебування на платній ділянці, сьомим виходом - із входом блока обліку користування платними ділянками, вихід якого з'єднаний з другим входом передавального пристрою, а восьмим виходом блок керування на час передачі даних з'єднується із входом пристрою для зчитування даних, що входить до складу переносного апаратно-програмного модуля, а що стосується зв'язків між складовими частинами блока реагування на ДТП, то третім виходом і другим входом блок формування повідомлення про ДТП з'єднаний із входом і виходом блока додаткового контролю, а четвертим виходом - із входом блока індикації факту виникнення ДТП, і при цьому блок електроживлення з'єднаний із входами живлення GPS/GNSS-приймача, блока розподілу потоків даних, блока обчислення параметрів руху, блока контролю параметрів руху, блока формування критеріїв аналізу, приймального пристрою, блока керування, блока індикації факту порушення правил дорожнього руху, блока індикації перебування на платній ділянці, передавального пристрою, блока обліку користування платними ділянками, а також, в межах блока реагування на ДТП - із входами живлення блока формування повідомлення про ДТП, блока індикації факту виникнення ДТП і блока додаткового контролю; в переносному апаратно-програмному модулі дані від багатофункціональної автомобільної бортової апаратури надходять на вхід пристрою для зчитування даних, вихід якого з'єднаний із першим входом переносного комп'ютера, причому з другим входом переносного комп'ютера з'єднаний вихід GPS/GNSS-приймача, а вихід переносного комп'ютера з'єднаний із входом передавального пристрою, вихід якого на час передачі даних з'єднується з входом приймального пристрою, що входить до складу центру збору і обробки інформації, і при цьому блок електроживлення з'єднаний із входами живлення пристрою для зчитування даних, GPS/GNSS-приймача, переносного комп'ютера і передавального пристрою; а у центрі збору і обробки інформації приймальний пристрій, на входи якого надходять дані від багатофункціональної автомобільної бортової апаратури, переносних апаратно-програмних модулів і від служб, відповідальних за встановлення постійних і тимчасових дорожніх знаків, першим виходом з'єднаний із входом блока екстреного реагування, який передає дані службам екстреного реагування, другим виходом - із входом блока формування формалізованих правил дорожнього руху, перший вихід і другий вхід якого з'єднані з першими входом і виходом бази даних, і який, крім того, передає дані до центрів поширення інформації, третім виходом - із входом блока оброблення даних автомобільної апаратури, вихід якого з'єднаний із другим входом бази даних, а четвертим виходом - із входом блока контролю користування платними ділянками, який передає інформацію організаціям, що забезпечують надання послуг користування платними ділянками, і при цьому блок електроживлення з'єднаний із входами живлення приймального пристрою, блока екстреного реагування, блока формування формалізованих правил дорожнього руху, блока оброблення даних автомобільної апаратури і блока контролю користування платними ділянками.
Текст
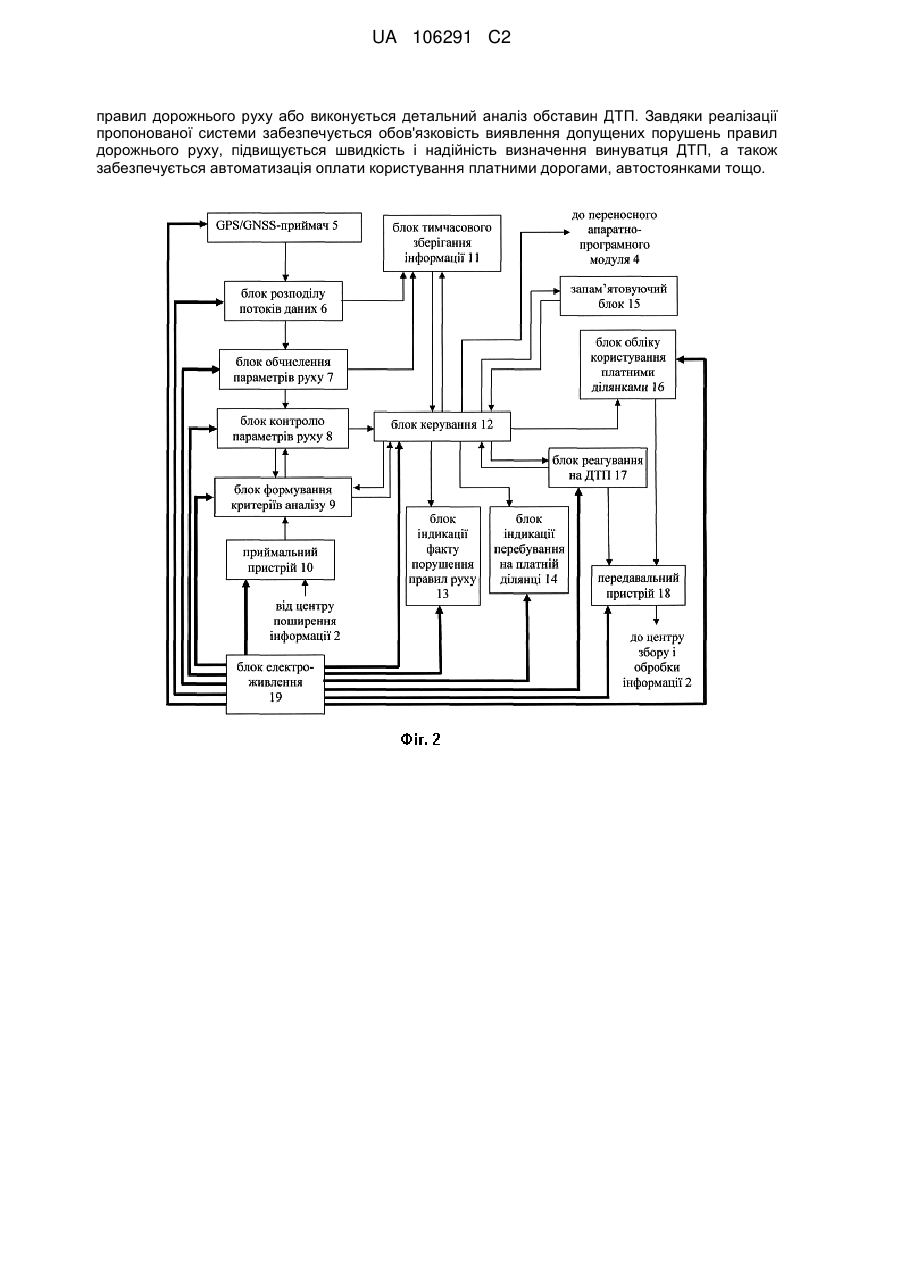
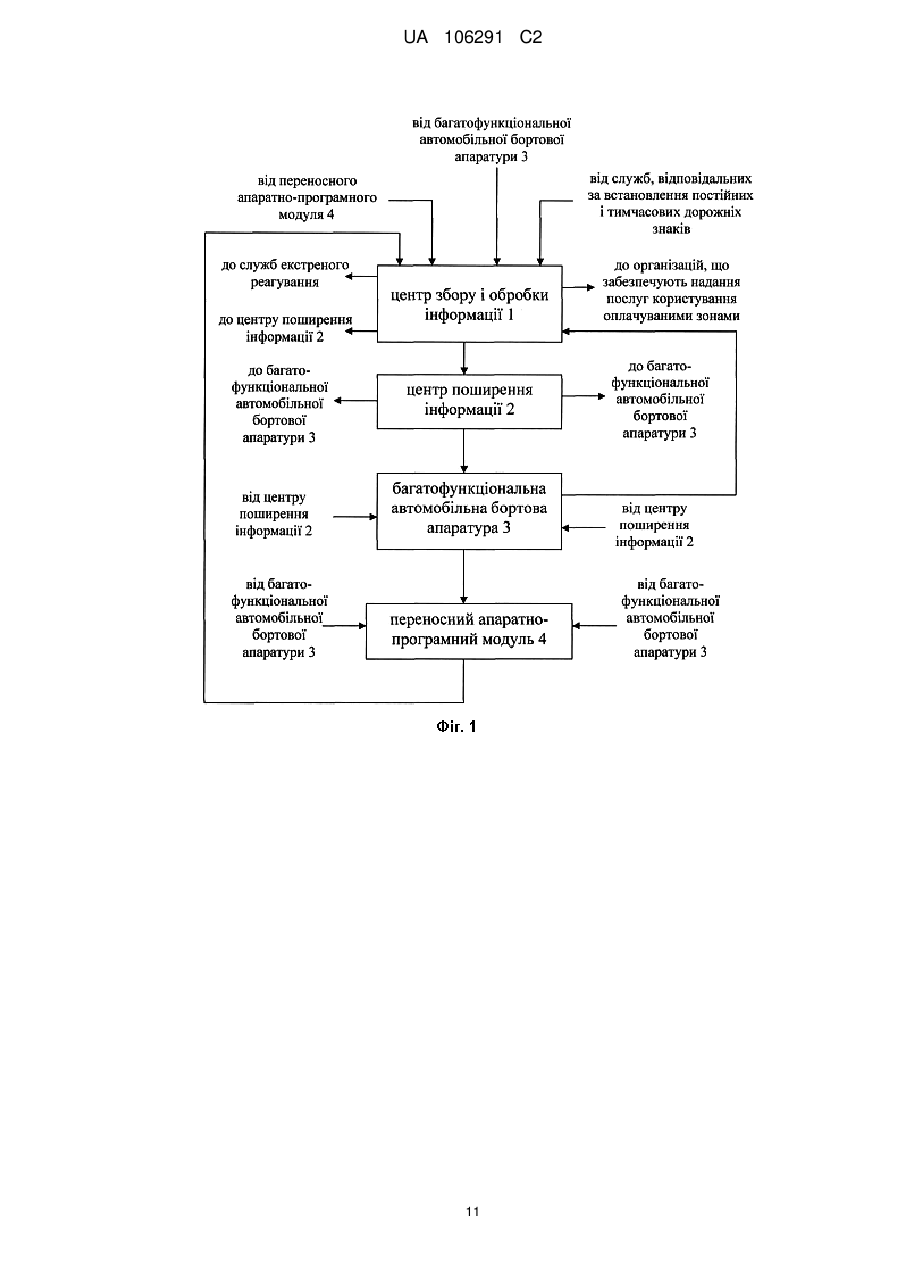
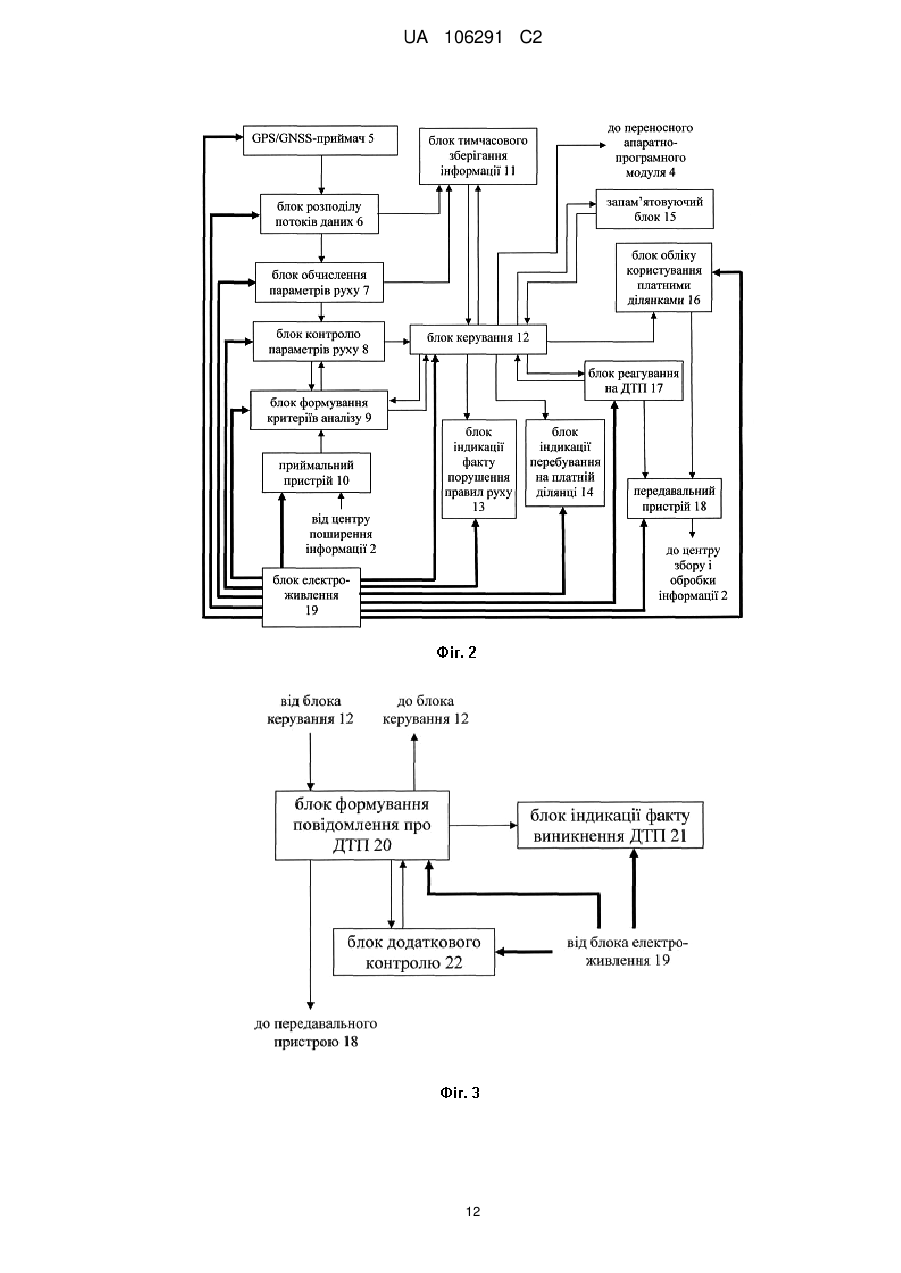
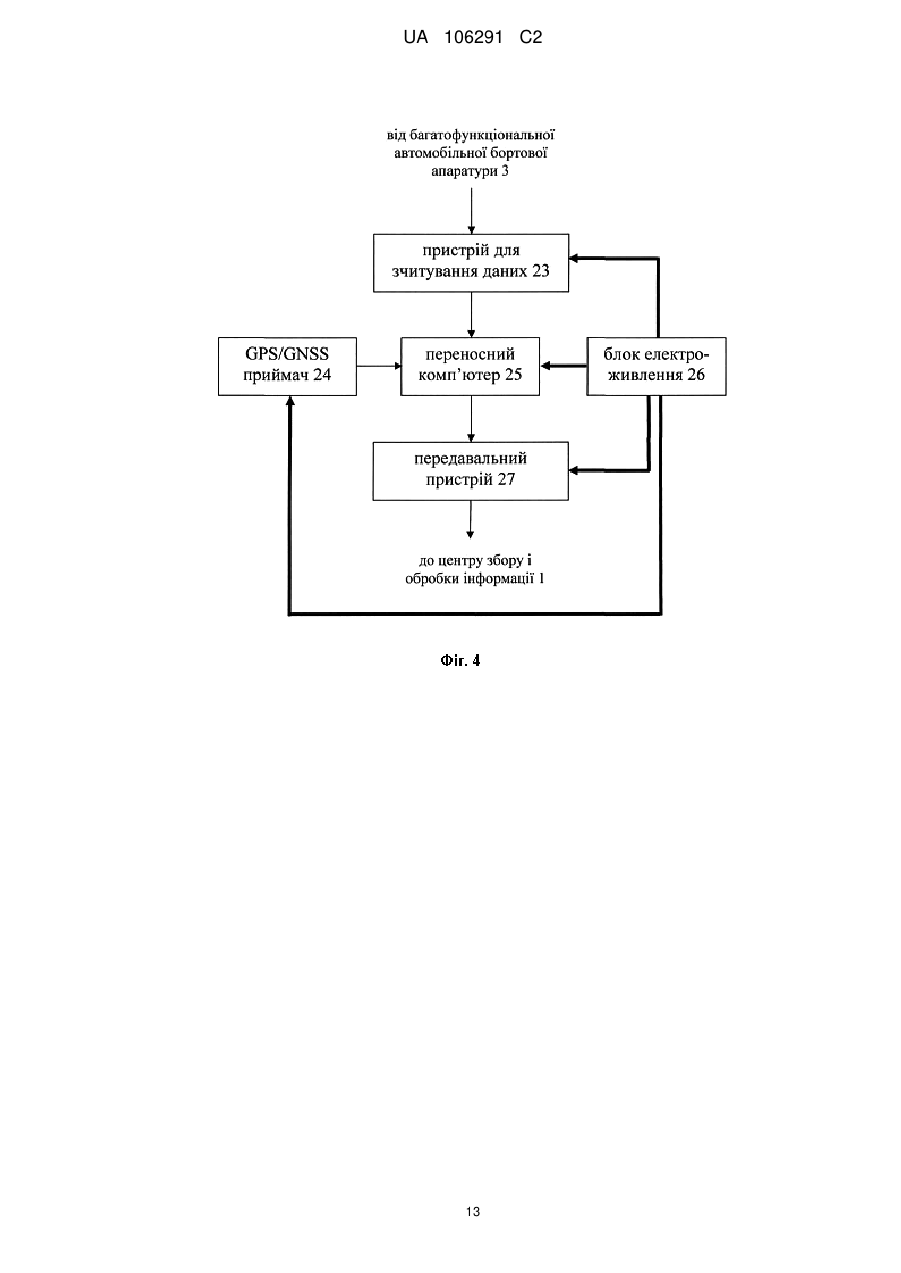
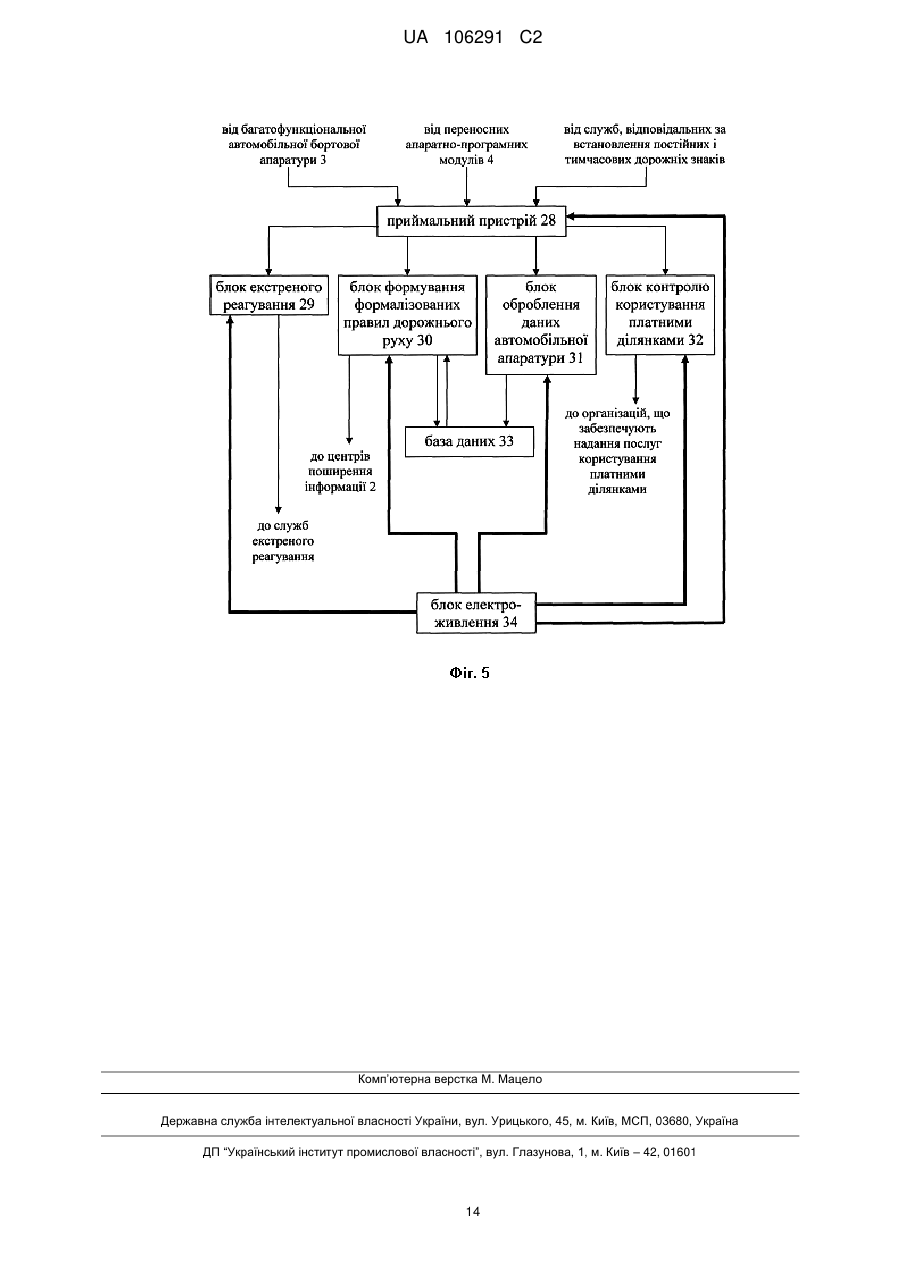
Реферат: Автоматизована система аналізу дотримання правил дорожнього руху, виявлення причин виникнення дорожньо-транспортних пригод і контролю користування платними ділянками. Винахід належить до радіотехніки, та може бути використаний для підвищення безпеки руху автотранспорту і для автоматизованого стягнення плати за перебування автомобіля у платних місцях. Система складається з багатофункціональної автомобільної апаратури, центру збору і обробки інформації, мережі центрів поширення інформації і переносних апаратно-програмних модулів. Функціонує система наступним чином. Обмеження для параметрів руху, що формуються на основі правил дорожнього руху і поширюються системою, надходять до багатофункціональної автомобільної апаратури. З ними порівнюються значення параметрів руху автомобіля, обчислені за сигналами глобальних навігаційних супутникових систем, і, якщо результати аналізу даної інформації свідчать про порушення правил руху або про виникнення ДТП, то ці результати, разом з відповідними навігаційними вимірами, заносяться до автомобільного запам'ятовуючого блока. Крім того, в результаті порівняння координат автомобіля з межами платних ділянок (платних доріг, стоянок тощо) визначаються періоди перебування на цих ділянках. Через переносний апаратно-програмний модуль накопичені дані потрапляють до центру збору і обробки інформації, де виконується її обробка з залученням додаткових даних, в результаті якої остаточно визначається наявність чи відсутність порушень UA 106291 C2 (12) UA 106291 C2 правил дорожнього руху або виконується детальний аналіз обставин ДТП. Завдяки реалізації пропонованої системи забезпечується обов'язковість виявлення допущених порушень правил дорожнього руху, підвищується швидкість і надійність визначення винуватця ДТП, а також забезпечується автоматизація оплати користування платними дорогами, автостоянками тощо. UA 106291 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до навігаційної техніки, та може бути використаний для підвищення безпеки руху автомобільного транспорту і для автоматизованого стягнення плати за перебування автомобіля у платних зонах. Відомий пристрій для попередження водія автотранспорту про близькість аварійно небезпечного об'єкта [Патент України на винахід № 79446 МПК G08G 1/00, опублікований 25.06.2007, Бюлетень № 9]. Цей пристрій за сигналами супутникових навігаційних систем визначає координати автотранспортного засобу і, порівнявши їх з координатами аварійно небезпечних об'єктів, що зберігаються у базі даних, генерує сигнал попередження водія у разі наближення автомобіля до такого об'єкта. Цей пристрій має такі функціональні обмеження: 1) він не передбачає аналізу швидкості та інших параметрів руху автомобіля, що унеможливлює автоматичне визначення факту виникнення дорожньо-транспортної пригоди (ДТП) і ряду порушень правил дорожнього руху (наприклад, перевищення швидкості); 2) він лише сповіщає про наближення автотранспортного засобу до того чи іншого об'єкта, але не аналізує дані про обмеження для параметрів руху, які існують на різних ділянках траєкторії автомобіля; 3) він не дозволяє накопичувати і зберігати вимірювальну навігаційну інформацію та результати її обробки і аналізу; 4) він не дає можливості проводити детальний аналіз зареєстрованої інформації і контролювати правильність сформованих попереджень. Відома також система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху [Патент України на винахід № 88999 МПК G01C 21/26, G08G 1/052, G08G 1/056, опублікований 10.12.2009, Бюлетень № 23]. У цій системі обмеження для параметрів руху, що визначаються правилами дорожнього руху і дорожніми знаками, передаються автомобільній багатофункціональній апаратурі, де з ними порівнюються реальні значення параметрів руху автомобіля, обчислені за сигналами глобальних навігаційних супутникових систем, і, якщо результати аналізу даної інформації свідчать про порушення правил руху, то ці результати, разом з відповідними навігаційними вимірами, заносяться до спеціалізованого автомобільного запам'ятовуючого блока. Потім ці дані передаються до центру збору і обробки інформації, де виконується їхня обробка з залученням додаткових даних, в результаті якої остаточно визначається наявність чи відсутність порушення правил дорожнього руху. Ця система має наступні функціональні обмеження. У ній не передбачене автоматизоване визначення моменту виникнення ДТП і не зберігаються ніякі дані про параметри руху автомобіля перед цим моментом, що унеможливлює проведення автоматизованого аналізу обставин виникнення ДТП. Найближчою за технічною суттю до пропонованого винаходу є система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху та визначення факту виникнення дорожньо-транспортної пригоди [Патент України на винахід № 91792 МПК G01С 21/26, G08G 1/052, G08G 1/056, опублікований 25.08.2010, Бюлетень № 16]. Ця система функціонує наступним чином. Обмеження для параметрів руху, що визначаються правилами дорожнього руху і дорожніми знаками, передаються багатофункціональній апаратурі, якою оснащений кожен автомобіль. З ними порівнюються реальні значення параметрів руху автомобіля, обчислені за сигналами глобальних навігаційних супутникових систем, і, якщо результати аналізу даної інформації свідчать про порушення правил дорожнього руху або про виникнення ДТП, то ці результати, разом з відповідними навігаційними вимірами, заносяться до спеціалізованого автомобільного запам'ятовуючого блока. Коли працівники ДАІ аналізують ДТП або виконують чергову перевірку, ці дані передаються до центру збору і обробки інформації, де виконується їхня додаткова обробка з залученням вимірів найближчих базових станцій супутникової навігації, в результаті якої остаточно визначається наявність чи відсутність порушення правил дорожнього руху у кожному конкретному випадку або виконується детальний аналіз обставин ДТП. Система містить в собі центр збору і обробки інформації, центри поширення інформації, багатофункціональну автомобільну бортову апаратуру і переносні апаратно-програмні модулі, причому до складу багатофункціональної автомобільної бортової апаратури входять: GPS/GNSS-приймач, блок розподілу потоків даних, блок обчислення параметрів руху, блок контролю параметрів руху, блок формування критеріїв аналізу, приймальний пристрій, блок тимчасового зберігання інформації, блок керування, блок формування повідомлення про ДТП, передавальний пристрій, блок індикації факту порушення правил дорожнього руху, запам'ятовуючий блок, блок додаткового контролю, блок індикації факту виникнення ДТП і блок 1 UA 106291 C2 5 10 15 20 25 30 35 40 45 50 55 60 електроживлення. При цьому кожен вихід центру збору і обробки інформації з'єднаний із входом одного з центрів поширення інформації, кожен центр поширення інформації передає дані багатофункціональній автомобільній бортовій апаратурі, у якій ці дані надходять на вхід приймального пристрою, вихід якого з'єднаний з першим входом блока формування критеріїв аналізу, другий вхід і перший вихід якого з'єднані з першими виходом і входом блока контролю параметрів руху, а вихід GPS/GNSS-приймача через блок розподілу потоків даних з'єднаний з першим входом блока тимчасового зберігання інформації і входом блока обчислення параметрів руху, перший вихід якого з'єднаний з другим входом блока контролю параметрів руху, а другий вихід блока обчислення параметрів руху з'єднаний з другим входом блока тимчасового зберігання інформації, першими входом і виходом блок керування з'єднаний з виходом і третім входом блока тимчасового зберігання інформації, другими виходом і входом блок керування з'єднаний із входом і виходом запам'ятовуючого блока, третіми виходом і входом блок керування з'єднаний з першими входом і виходом блока формування повідомлення про ДТП, четвертими виходом і входом блок керування з'єднаний з третім входом і другим виходом блока формування критеріїв аналізу, п'ятим входом блок керування з'єднаний з другим виходом блока контролю параметрів руху, п'ятим виходом блок керування з'єднаний із входом блока індикації факту порушення правил руху, другими виходом і входом блок формування повідомлення про ДТП з'єднаний із входом і виходом блока додаткового контролю, третій вихід блока формування повідомлення про ДТП з'єднаний із входом блока індикації факту виникнення ДТП, четвертий вихід блока формування повідомлення про ДТП з'єднаний із входом передавального пристрою, який передає інформацію у центр збору і обробки інформації, а шостий вихід блока керування на час передачі даних з'єднується з входом переносного апаратно-програмного модуля, вихід якого також на час передачі даних з'єднується з входом центру збору і обробки інформації, і при цьому блок електроживлення з'єднаний із входами живлення GPS/GNSS-приймача, блока розподілу потоків даних, блока обчислення параметрів руху, блока контролю параметрів руху, блока формування критеріїв аналізу, приймального пристрою, блока керування, блока формування повідомлення про ДТП, передавального пристрою, блока індикації факту порушення правил дорожнього руху, блока додаткового контролю і блока індикації факту виникнення ДТП. Ця система має наступне функціональне обмеження. В результаті ДТП досить часто може бути пошкоджена зовнішня антена GPS/GNSS-приймача, розташована на корпусі автомобіля, або кабель, який пов'язує її з GPS/GNSS-приймачем, або можуть виникнути перешкоди, що заважають отриманню повноцінних навігаційних вимірів у обсязі, достатньому для вирішення навігаційної задачі. Тоді параметри руху, визначені виключно на основі вимірювальної інформації, накопиченої до моменту виникнення ДТП, можуть виявитися недостатньо точними для проведення детального аналізу обставин ДТП. Крім того, спільним функціональним обмеженням усіх аналогів даного винаходу є те, що у жодному з них не передбачена можливість автоматизованого стягнення плати за перебування автомобіля у платній зоні, тобто за користування платними автостоянками, платними автодорогами тощо. Технічною задачею винаходу є розширення функціональних можливостей системи шляхом доповнення центру збору і обробки інформації блоком контролю користування платними ділянками, кожного переносного апаратно-програмного модуля - GPS/GNSS-приймачем, а багатофункціональної автомобільної бортової апаратури - блоком обліку користування платними ділянками та блоком індикації перебування на платній ділянці. Ця задача вирішена наступним чином. В автоматизованій системі аналізу дотримання правил дорожнього руху, виявлення причин виникнення дорожньо-транспортних пригод і контролю користування платними ділянками, що включає в себе центр збору і обробки інформації, центри поширення інформації, багатофункціональну автомобільну бортову апаратуру і переносні апаратно-програмні модулі, причому до складу центру збору і обробки інформації входять: приймальний пристрій, блок екстреного реагування, блок формування формалізованих правил дорожнього руху, блок оброблення даних автомобільної апаратури, база даних і блок електроживлення; до складу переносного модуля входять: пристрій для зчитування даних, переносний комп'ютер, блок електроживлення і передавальний пристрій; а до складу багатофункціональної автомобільної бортової апаратури входять: GPS/GNSSприймач, блок розподілу потоків даних, блок обчислення параметрів руху, блок контролю параметрів руху, блок формування критеріїв аналізу, приймальний пристрій, блок тимчасового зберігання інформації, блок керування, блок індикації факту порушення правил дорожнього руху, запам'ятовуючий блок, передавальний пристрій, блок електроживлення і блок реагування на ДТП, що складається з блока формування повідомлення про ДТП, блока індикації факту 2 UA 106291 C2 5 10 15 20 25 30 35 40 45 50 55 виникнення ДТП і блока додаткового контролю, згідно винаходу, центр збору і обробки інформації додатково включає в себе блок контролю користування платними ділянками, кожен переносний апаратно-програмний модуль додатково включає в себе GPS/GNSS-приймач, а багатофункціональна автомобільна бортова апаратура додатково включає в себе блок обліку користування платними ділянками і блок індикації перебування на платній ділянці, і при цьому центр збору і обробки інформації з'єднаний із входами мережі центрів поширення інформації, кожен центр поширення інформації передає дані багатофункціональній автомобільній бортовій апаратурі, у якій ці дані надходять на вхід приймального пристрою, вихід якого з'єднаний з першим входом блока формування критеріїв аналізу, другий вхід і перший вихід якого з'єднані з першими виходом і входом блока контролю параметрів руху, а вихід GPS/GNSS-приймача через блок розподілу потоків даних з'єднаний з першим входом блока тимчасового зберігання інформації і входом блока обчислення параметрів руху, перший вихід якого з'єднаний з другим входом блока контролю параметрів руху а другий вихід - з другим входом блока тимчасового зберігання інформації, першими входом і виходом блок керування з'єднаний з виходом і третім входом блока тимчасового зберігання інформації, другими виходом і входом - із входом і виходом запам'ятовуючого блока, третіми виходом і входом - з першими входом і виходом блока формування повідомлення про ДТП, що входить до складу блока реагування на ДТП і з'єднаний другим виходом з першим входом передавального пристрою, що служить для передачі даних до центру збору і обробки інформації, четвертими виходом і входом блок керування з'єднаний з третім входом і другим виходом блока формування критеріїв аналізу, п'ятим входом -з другим виходом блока контролю параметрів руху, п'ятим виходом - із входом блока індикації факту порушення правил дорожнього руху, шостим виходом - із входом блока індикації перебування на платній ділянці, сьомим виходом - із входом блока обліку користування платними ділянками, вихід якого з'єднаний з другим входом передавального пристрою, а восьмим виходом блок керування на час передачі даних з'єднується із входом пристрою для зчитування даних, що входить до складу переносного апаратно-програмного модуля, а що стосується зв'язків між складовими частинами блока реагування на ДТП, то третім виходом і другим входом блок формування повідомлення про ДТП з'єднаний із входом і виходом блока додаткового контролю, а четвертим виходом - із входом блока індикації факту виникнення ДТП, і при цьому блок електроживлення з'єднаний із входами живлення GPS/GNSSприймача, блока розподілу потоків даних, блока обчислення параметрів руху, блока контролю параметрів руху, блока формування критеріїв аналізу, приймального пристрою, блока керування, блока індикації факту порушення правил руху, блока індикації перебування на платній ділянці, передавального пристрою, блока обліку користування платними ділянками, а також, в межах блока реагування на ДТП - із входами живлення блока формування повідомлення про ДТП, блока індикації факту виникнення ДТП і блока додаткового контролю; в переносному апаратно-програмному модулі дані від багатофункціональної автомобільної бортової апаратури надходять на вхід пристрою для зчитування даних, вихід якого з'єднаний із першим входом переносного комп'ютера, причому з другим входом переносного комп'ютера з'єднаний вихід GPS/GNSS-приймача, а вихід переносного комп'ютера з'єднаний із входом передавального пристрою, вихід якого на час передачі даних з'єднується з входом приймального пристрою, що входить до складу центру збору і обробки інформації, і при цьому блок електроживлення з'єднаний із входами живлення пристрою для зчитування даних, GPS/GNSS-приймача, переносного комп'ютера і передавального пристрою; а у центрі збору і обробки інформації приймальний пристрій, на входи якого надходять дані від багатофункціональної автомобільної бортової апаратури, переносних апаратно-програмних модулів і від служб, відповідальних за встановлення постійних і тимчасових дорожніх знаків, першим виходом з'єднаний із входом блока екстреного реагування, який передає дані службам екстреного реагування, другим виходом - із входом блока формування формалізованих правил дорожнього руху, перший вихід і другий вхід якого з'єднані з першими входом і виходом бази даних, і який, крім того, передає дані до центрів поширення інформації, третім виходом - із входом блока оброблення даних автомобільної апаратури, вихід якого з'єднаний із другим входом бази даних, а четвертим виходом - із входом блока контролю користування платними ділянками, який передає інформацію організаціям, що забезпечують надання послуг користування платними ділянками, і при цьому блок електроживлення з'єднаний із входами живлення приймального пристрою, блока екстреного реагування, блока формування формалізованих правил дорожнього руху, блока оброблення даних автомобільної апаратури і блока контролю користування платними ділянками. На фіг. 1 зображено загальну схему запропонованої системи. 3 UA 106291 C2 5 10 15 20 25 30 35 40 45 50 55 60 На фіг. 2 зображено схему багатофункціональної автомобільної бортової апаратури, яка є складовою частиною запропонованої системи. На фіг. 3 зображено схему блока реагування на ДТП, який є складовою частиною багатофункціональної автомобільної бортової апаратури. На фіг. 4 зображено схему переносного апаратно-програмного модуля, який є складовою частиною запропонованої системи. На фіг. 5 зображено схему центру збору і обробки інформації, який є складовою частиною запропонованої системи. Автоматизована система аналізу дотримання правил дорожнього руху, виявлення причин виникнення дорожньо-транспортних пригод і контролю користування платними ділянками містить в собі центр збору і обробки інформації 1, центри поширення інформації 2, багатофункціональну автомобільну бортову апаратуру 3 і переносні апаратно-програмні модулі 4, причому до складу багатофункціональної автомобільної бортової апаратури 3 входять: GPS/GNSS-приймач 5, блок розподілу потоків даних 6, блок обчислення параметрів руху 7, блок контролю параметрів руху 8, блок формування критеріїв аналізу 9, приймальний пристрій 10, блок тимчасового зберігання інформації 11, блок керування 12, блок індикації факту порушення правил руху 13, блок індикації перебування на платній ділянці 14, запам'ятовуючий блок 15, блок обліку користування платними ділянками 16, блок реагування на ДТП 17, передавальний пристрій 18, і блок електроживлення 19, причому до складу блока реагування на ДТП 17 входять: блок формування повідомлення про ДТП 20, блок індикації факту виникнення ДТП 21 і блок додаткового контролю 22, до складу кожного переносного апаратно-програмного модуля 4 входять: пристрій для зчитування даних 23, GPS/GNSS приймач 24, переносний комп'ютер 25, блок електроживлення 26 і передавальний пристрій 27, а до складу центру збору і обробки інформації 1 входять: приймальний пристрій 28, блок екстреного реагування 29, блок формування формалізованих правил дорожнього руху 30, блок оброблення даних автомобільної апаратури 31, блок контролю користування платними ділянками 32, база даних 33 і блок електроживлення 34. При цьому центр збору і обробки інформації 1 з'єднаний із входами мережі центрів поширення інформації 2, кожен центр поширення інформації 2 передає дані багатофункціональній автомобільній бортовій апаратурі 3, у якій ці дані надходять на вхід приймального пристрою 10, вихід якого з'єднаний з першим входом блока формування критеріїв аналізу 9, другий вхід і перший вихід якого з'єднані з першими виходом і входом блока контролю параметрів руху 8, а вихід GPS/GNSS-приймача 5 через блок розподілу потоків даних 6 з'єднаний з першим входом блока тимчасового зберігання інформації 11 і входом блока обчислення параметрів руху 7, перший вихід якого з'єднаний з другим входом блока контролю параметрів руху 8, а другий вихід - з другим входом блока тимчасового зберігання інформації 11, першими входом і виходом блок керування 12 з'єднаний з виходом і третім входом блока тимчасового зберігання інформації 11, другими виходом і входом - із входом і виходом запам'ятовуючого блока 15, третіми виходом і входом - з першими входом і виходом блока формування повідомлення про ДТП 20, що входить до складу блока реагування на ДТП 17 і з'єднаний другим виходом з першим входом передавального пристрою 18, що служить для передачі даних до центру збору і обробки інформації 1, четвертими виходом і входом блок керування 12 з'єднаний з третім входом і другим виходом блока формування критеріїв аналізу 9, п'ятим входом - з другим виходом блока контролю параметрів руху 8, п'ятим виходом - із входом блока індикації факту порушення правил дорожнього руху 13, шостим виходом - із входом блока індикації перебування на платній ділянці 14, сьомим виходом - із входом блока обліку користування платними ділянками 16, вихід якого з'єднаний з другим входом передавального пристрою 18, а восьмим виходом блок керування 12 на час передачі даних з'єднується із входом пристрою для зчитування даних 23, що входить до складу переносного апаратно-програмного модуля 4, а що стосується зв'язків між складовими частинами блока реагування на ДТП 17, то третім виходом і другим входом блок формування повідомлення про ДТП 20 з'єднаний із входом і виходом блока додаткового контролю 22, а четвертим виходом - із входом блока індикації факту виникнення ДТП 21, і при цьому блок електроживлення 19 з'єднаний із входами живлення GPS/GNSS-приймача 5, блока розподілу потоків даних 6, блока обчислення параметрів руху 7, блока контролю параметрів руху 8, блока формування критеріїв аналізу 9, приймального пристрою 10, блока керування 12, блока індикації факту порушення правил руху 13, блока індикації перебування на платній ділянці 14, передавального пристрою 18, блока обліку користування платними ділянками 16, а також, в межах блока реагування на ДТП 17 - із входами живлення блока формування повідомлення про ДТП 20, блока індикації факту виникнення ДТП 21 і блока додаткового контролю 22; в переносному апаратнопрограмному модулі 4 дані від багатофункціональної автомобільної бортової апаратури 3 4 UA 106291 C2 5 10 15 20 25 30 35 40 45 50 55 60 надходять на вхід пристрою для зчитування даних 23, вихід якого з'єднаний із першим входом переносного комп'ютера 25, причому з другим входом переносного комп'ютера 25 з'єднаний вихід GPS/GNSS-приймача 24, а вихід переносного комп'ютера 25 з'єднаний із входом передавального пристрою 27, вихід якого на час передачі даних з'єднується з входом приймального пристрою 28, що входить до складу центру збору і обробки інформації 1, і при цьому блок електроживлення 26 з'єднаний із входами живлення пристрою для зчитування даних 23, GPS/GNSS-приймача 24, переносного комп'ютера 25 і передавального пристрою 27; а у центрі збору і обробки інформації 1 приймальний пристрій 28, на входи якого надходять дані від багатофункціональної автомобільної бортової апаратури 3, переносних апаратнопрограмних модулів 4 і від служб, відповідальних за встановлення постійних і тимчасових дорожніх знаків, першим виходом з'єднаний із входом блока екстреного реагування 29, який передає дані службам екстреного реагування, другим виходом - із входом блока формування формалізованих правил дорожнього руху 30, перший вихід і другий вхід якого з'єднані з першими входом і виходом бази даних 33, і який, крім того, передає дані до центрів поширення інформації 2, третім виходом - із входом блока оброблення даних автомобільної апаратури 31, вихід якого з'єднаний із другим входом бази даних 33, а четвертим виходом - із входом блока контролю користування платними ділянками 32, який передає інформацію організаціям, що забезпечують надання послуг користування платними ділянками, і при цьому блок електроживлення 34 з'єднаний із входами живлення приймального пристрою 28, блока екстреного реагування 29, блока формування формалізованих правил дорожнього руху 30, блока оброблення даних автомобільної апаратури 31 і блока контролю користування платними ділянками 32. Система працює таким чином. У центрі збору і обробки інформації 1 зберігається база даних 33, що містить інформацію про діапазони координат, в межах яких діють обмеження (заборона паркування, обмеження швидкості або напрямків руху тощо), що визначаються розміщеними на вулицях даного населеного пункту дорожніми знаками, а також координати меж ділянок, перебування автомобіля на яких є платним (автостоянок, платних доріг тощо), ідентифікатор і тип кожної з таких ділянок. Платні ділянки умовно діляться на два типи за алгоритмом стягнення плати за користування ними: ті, для яких оплачується час перебування автомобіля в межах ділянки (наприклад, автостоянки) і ті, для яких оплачується шлях, пройдений автомобілем в межах ділянки (наприклад, деякі платні дороги). Дані щодо змін у розташуванні дорожніх знаків оперативно надходять до центру збору і обробки інформації 1 від служб, відповідальних за встановлення постійних і тимчасових дорожніх знаків, і заносяться до бази даних 33. На основі інформації, що зберігається у базі даних 33, формуються пакети даних, що містять формалізовані для подальшого використання правила руху (до складу яких входять також і дані про межі платних ділянок доріг). Вони передаються за допомогою провідного зв'язку в центри поширення інформації 2. При цьому пакет даних, що надходить до центру поширення інформації 2, містить правила руху лише на тих ділянках вулиць, які розташовані в межах зони, прилеглої до цього центру і закріпленої за ним. Кожен з центрів поширення інформації 2 безперервно транслює ці дані, а також інформацію про час їх формування і про межі даної зони для усіх автотранспортних засобів, що перебувають на території цієї зони і прилеглих до неї зон і оснащені багатофункціональною автомобільною бортовою апаратурою 3. Для цього може використовуватися будь-який радіозв'язок (ультракороткохвильовий, GSM/GPRS або Wi-Fi зв'язок). У багатофункціональній автомобільній бортовій апаратурі 3 GPS/GNSS-приймач 5 постійно, через кожний інтервал часу Δt1, на основі сигналів навігаційних супутникових систем формує вимірювальну інформацію, що служить вихідними даними для визначення параметрів руху автомобіля. Вимірювальна інформація надходить до блока розподілу потоків даних 6, який виконує наступні дві функції. По-перше, він передає вимірювальну інформацію з тією ж періодичністю, з якою вона була сформована, у блок тимчасового зберігання інформації 11, у якому зберігається вимірювальна інформація, накопичена протягом останнього інтервалу часу Δt2, а також значення параметрів руху, сформовані протягом цього ж часу, і відбувається постійний циклічний перезапис цих даних. По-друге, раз на інтервал часу Δt3, що складається з цілого числа інтервалів Δt1, блок розподілу потоків даних 6 передає вимірювальну інформацію у блок обчислення параметрів руху 7, де на її основі оцінюються координати, швидкість, прискорення і швидкість зміни прискорення автомобіля. Усі обчислені параметри руху надходять у блок тимчасового зберігання інформації 11, а також у блок контролю параметрів руху 8, звідки, через кожний інтервал часу Δt4, що складається з цілого числа інтервалів Δt3, вектор координат автомобіля передається у блок формування критеріїв аналізу 9. Паралельно 5 UA 106291 C2 5 10 15 20 25 30 35 40 45 50 55 60 з цим, у цей же блок безперервно надходять дані про межі зон населеного пункту і час формування формалізованих правил руху для цих зон, отримувані приймальним пристроєм 10 від усіх центрів поширення інформації 2, що перебувають в області радіовидимості для поточного місця перебування автомобіля. У блоці формування критеріїв аналізу 9 постійно зберігається поточний перелік найближчих зон населеного пункту, що складається з зони перебування автомобіля і сусідніх з нею зон, а також інформація про формалізовані правила руху в межах цих зон і про час формування цих даних. Через кожний інтервал часу Δt4, в результаті аналізу координат автомобіля і даних про межі зон населеного пункту, у блоці формування критеріїв аналізу 9 визначається, у якій із зон перебуває автомобіль. Якщо визначена поточна зона перебування входить до вже існуючого переліку найближчих зон, то виконується оновлення формалізованих правил руху для цієї зони. Для цього порівнюється час формування пакета даних, що транслюється відповідним центром поширення інформації 2, і правил руху, які зберігаються у блоці формування критеріїв аналізу 9, і, якщо трансльовані дані були сформовані пізніше, то для цієї зони виконується завантаження нового пакета даних, прийнятого приймальним пристроєм 10, і заміна старого набору правил руху на новий. Якщо визначена поточна зона перебування не входить до створеного раніше переліку найближчих зон, то для цієї зони виконується завантаження прийнятого приймальним пристроєм 10 пакету даних, що містить формалізовані правила руху. Після цього виконується спільна обробка координат автомобіля з правилами руху в межах поточної зони перебування і визначаються обмеження для параметрів руху (інтервали їх допустимих значень), що існують у поточному місці перебування автомобіля. Ці обмеження формуються і передаються у блок контролю параметрів руху 8 раз на інтервал часу Δt4. У тому разі, якщо визначена поточна зона перебування автомобіля відрізняється від зони перебування, інформація про яку зберігається у блоці формування критеріїв аналізу 9, створюється новий перелік найближчих зон і набір формалізованих правил руху для них. При цьому втрачається вся інформація, що стосується зон, які були включені до старого переліку, але не увійшли до нового, а для кожної зони, яка не входила до старого переліку і була включена до нового, виконується завантаження прийнятого приймальним пристроєм 10 від відповідного центру поширення інформації 2 пакета даних, що містить формалізовані правила руху в межах цієї зони. Для решти зон, тобто для тих, що були і залишаються у переліку найближчих зон, виконується оновлення формалізованих правил руху за алгоритмом, описаним вище. У тому разі, якщо поточна зона перебування автомобіля залишилася незмінною, виконується оновлення формалізованих правил руху для усіх сусідніх з нею зон. У блоці контролю параметрів руху 8 виконується порівняння оцінок реальних значень параметрів руху з межами інтервалів їх допустимих значень, в результаті чого формується набір ознак, що характеризують наявність чи відсутність порушення кожного з обмежень. Такі перевірки значень параметрів руху виконуються через кожний інтервал часу Δt3, але при цьому, в межах одного інтервалу часу Δt4, використовується фіксований набір сформованих обмежень. Разом з цим, виконується наступна перевірка: якщо швидкість зміни прискорення автомобіля перевищує граничне допустиме значення, встановлене для цього параметра, то робиться висновок про виникнення ДТП і формується відповідна ознака. Крім того, обчислені координати автомобіля порівнюються з координатами платних ділянок і формується ознака перебування автомобіля в межах платної ділянки. Усі ознаки, сформовані у блоці контролю параметрів руху 8, а також поточні значення параметрів руху, ідентифікатор і тип платної ділянки, в межах якої перебуває автомобіль, передаються у блок керування 12, де відбувається їх аналіз (якщо автомобіль перебуває за межами платних ділянок, то замість ідентифікатора і типу поточної платної ділянки передаються нулі). Якщо сформовані ознаки свідчать про недопустимі значення якихось параметрів руху, що означає порушення правил руху, то блок керування 12 передає до запам'ятовуючого блока 15 ці ознаки, обчислені поточні значення усіх параметрів руху, пакет формалізованих правил руху для поточної зони перебування автомобіля, отриманий за запитом від блока формування критеріїв аналізу 9, а також вимірювальну інформацію, отриману за запитом від блока тимчасового зберігання інформації 11. Взагалі, до запам'ятовуючого блока 15 заноситься вимірювальна інформація, накопичена протягом інтервалу часу Δt5 (Δt5
ДивитисяДодаткова інформація
Автори англійськоюDokhov Oleksandr Ivanovych, Lukianov Oleksandr Mykhailovych, Hrinchenko Olena Volodymyrivna, Lukianova Olha Oleksiivna
Автори російськоюДохов Александр Иванович, Лукьянов Александр Михайлович, Гринченко Елена Владимировна, Лукьянова Ольга Алексеевна
МПК / Мітки
МПК: G08G 1/0962, G08G 1/052, G07B 15/00, G01C 21/26, G08G 1/056
Мітки: дорожнього, система, контролю, ділянками, пригод, виявлення, причин, платними, автоматизована, правил, користування, руху, аналізу, дотримання, дорожно-транспортних, виникнення
Код посилання
<a href="https://ua.patents.su/16-106291-avtomatizovana-sistema-analizu-dotrimannya-pravil-dorozhnogo-rukhu-viyavlennya-prichin-viniknennya-dorozhno-transportnikh-prigod-i-kontrolyu-koristuvannya-platnimi-dilyankami.html" target="_blank" rel="follow" title="База патентів України">Автоматизована система аналізу дотримання правил дорожнього руху, виявлення причин виникнення дорожньо-транспортних пригод і контролю користування платними ділянками</a>
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху та визначення факту виникнення дорожньо-транспортної пригоди
Номер патенту: 91792
Опубліковано: 25.08.2010
Автори: Грінченко Олена Володимирівна, Дохов Олександр Іванович, Лук'янова Ольга Олексіївна, Сітенко Олександр Миколайович, Лук'янов Олександр Михайлович
МПК: G08G 1/056, G08G 1/052, G01C 21/26
Мітки: визначення, автоматизованого, дорожнього, система, виникнення, руху, пригоди, дорожньо-транспортної, дотримання, правил, водієм, автомобіля, факту, контролю
Формула / Реферат:
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху та визначення факту виникнення дорожньо-транспортної пригоди, до складу якої входить багатофункціональна автомобільна бортова апаратура, що включає в себе GPS/GNSS-приймач, запам'ятовуючий блок і блок електроживлення, яка відрізняється тим, що до її складу входять також центр збору і обробки інформації, мережа центрів поширення інформації і переносні...
Автоматизована система збору інформації про параметри руху автомобіля та аналізу причин виникнення дорожньо-транспортної пригоди
Номер патенту: 101717
Опубліковано: 25.04.2013
Автори: Лук'янова Ольга Олексіївна, Дохов Олександр Іванович, Лук'янов Олександр Михайлович, Грінченко Олена Володимирівна, Галевич Максим Миколайович
МПК: G08G 1/056, G01C 21/28, G08G 1/052
Мітки: причин, параметри, виникнення, автоматизована, руху, пригоди, збору, автомобіля, дорожньо-транспортної, інформації, аналізу, система
Формула / Реферат:
Автоматизована система збору інформації про параметри руху автомобіля та аналізу причин виникнення дорожньо-транспортної пригоди, що включає в себе: центр збору і обробки інформації, центри поширення інформації, багатофункціональну автомобільну бортову апаратуру і переносні апаратно-програмні модулі, причому до складу багатофункціональної автомобільної бортової апаратури входять: GPS/GNSS-приймач, блок розподілу потоків даних, блок...
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху

Номер патенту: 88999
Опубліковано: 10.12.2009
Автори: Лук'янов Олександр Михайлович, Дохов Олександр Іванович, Грінченко Олена Володимирівна, Лук'янова Ольга Олексіївна
МПК: G08G 1/056, G01C 21/26, G08G 1/052
Мітки: правил, водієм, контролю, система, автоматизованого, дорожнього, автомобіля, руху, дотримання
Формула / Реферат:
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху, до складу якої входить багатофункціональна автомобільна бортова апаратура, що включає в себе GNSS-приймач, запам'ятовуючий блок і блок електроживлення, яка відрізняється тим, що до її складу входять також центр збору і обробки інформації, мережа центрів поширення інформації і переносні апаратно-програмні модулі, а багатофункціональна автомобільна...
Система для персоніфікації дотримання правил дорожнього руху (пдпдр) транспортним засобом та спосіб її використання
Номер патенту: 99251
Опубліковано: 10.08.2012
Автор: Денисов Олександр Костянтинович
МПК: G08G 1/017, G08G 1/052
Мітки: дорожнього, система, засобом, правил, транспортним, дотримання, використання, спосіб, руху, пдпдр, персоніфікації
Формула / Реферат:
1. Система для персоніфікації дотримання правил дорожнього руху транспортним засобом, яка містить приймально-передавальний радіокомплекс (1) з блоком енергозабезпечення (2) та антенами (3), блоком зчитування (4), блоком контролю інформації (5), дешифратором (6), перетворювачем коду (7), пристроєм керування зчитування, накопичення і аналізу отриманої через радіомітки інформації, а також передачі цієї інформації на інші системи, блоком...
Спосіб виявлення та інформування про порушення правил дорожнього руху
Номер патенту: 92097
Опубліковано: 25.07.2014
Автор: Резніков Володимир Володимрович
МПК: G06Q 90/00
Мітки: інформування, спосіб, правил, руху, дорожнього, порушення, виявлення
Формула / Реферат:
1. Спосіб виявлення та інформування про порушення правил дорожнього руху, при якому здійснюють передачу інформаційних даних між базами даних систем, що виявляють, обробляють, зберігають та здійснюють пошук даних, який відрізняється тим, що для виявлення та ідентифікації конкретного об'єкта встановлюють технічні засоби, що мають функцію фото та/або відеозапису для фіксації правопорушень у сфері забезпечення безпеки дорожнього руху, інформацію...
Попередній патент: Спосіб керування щитовим кріпленням
Наступний патент: Сенсорний пристрій для визначення місцеположення та центра ваги об’єкта