Самохідний багатоопорний агрегат підґрунтового зрошування
Номер патенту: 109885
Опубліковано: 26.10.2015
Автори: Серафимович Павло Макарович, Дорошенко Світлана Павлівна, Довга Стефанія Юріївна, Дорошенко Андрій Олександрович
Формула / Реферат
1. Самохідний багатоопорний агрегат підґрунтового зрошення фронтального типу пересування, який містить закріплені на опорах самохідних візків поливний напірний трубопровід, виконаний з можливістю обертання навколо своєї осі із розміщеними на ньому монтажними ободами з телескопічними апаратами з форсунками, роторно-поршневі гідродвигуни з пустотілими валами, напірний трубопровід подачі води до роторно-поршневих гідродвигунів, при цьому роторно-поршневі гідродвигуни обладнані системою приладів для прямолінійного та зворотного пересування та пристроєм для налагодження агрегату на потрібну поливну норму, при цьому агрегат містить систему тросових відтяжок для закріплення трубопроводів від провисання з пружинами та приладами для стягування, а на обох кінцях агрегату встановлені водозабірні вузли із обертовими патрубками, закріпленими до пустотілих валів роторно-поршневих гідродвигунів, та нерухомими патрубками, закріпленими до опорних візків.
2. Агрегат за п. 1, в якому поливний напірний трубопровід та напірний трубопровід подачі води до роторно-поршневих гідродвигунів з'єднані за допомогою фланців між двома опорними самохідними візками, а кожна пара з'єднана з іншою парою ділянками труб, які мають посередині прольоту шарнірні з'єднання, при цьому на шарнірних з'єднаннях напірного трубопроводу подачі води до роторно-поршневих гідродвигунів розміщені автомати прямолінійного руху агрегату, при цьому одна стійка автомата закріплена праворуч від шарніра, друга - ліворуч, а сам корпус автомата має три патрубки, один з'єднаний з напірним трубопроводом подачі води до роторно-поршневих гідродвигунів, другий - трубкою з приймальною камерою реверсного перемикача, а третій патрубок - скидний.
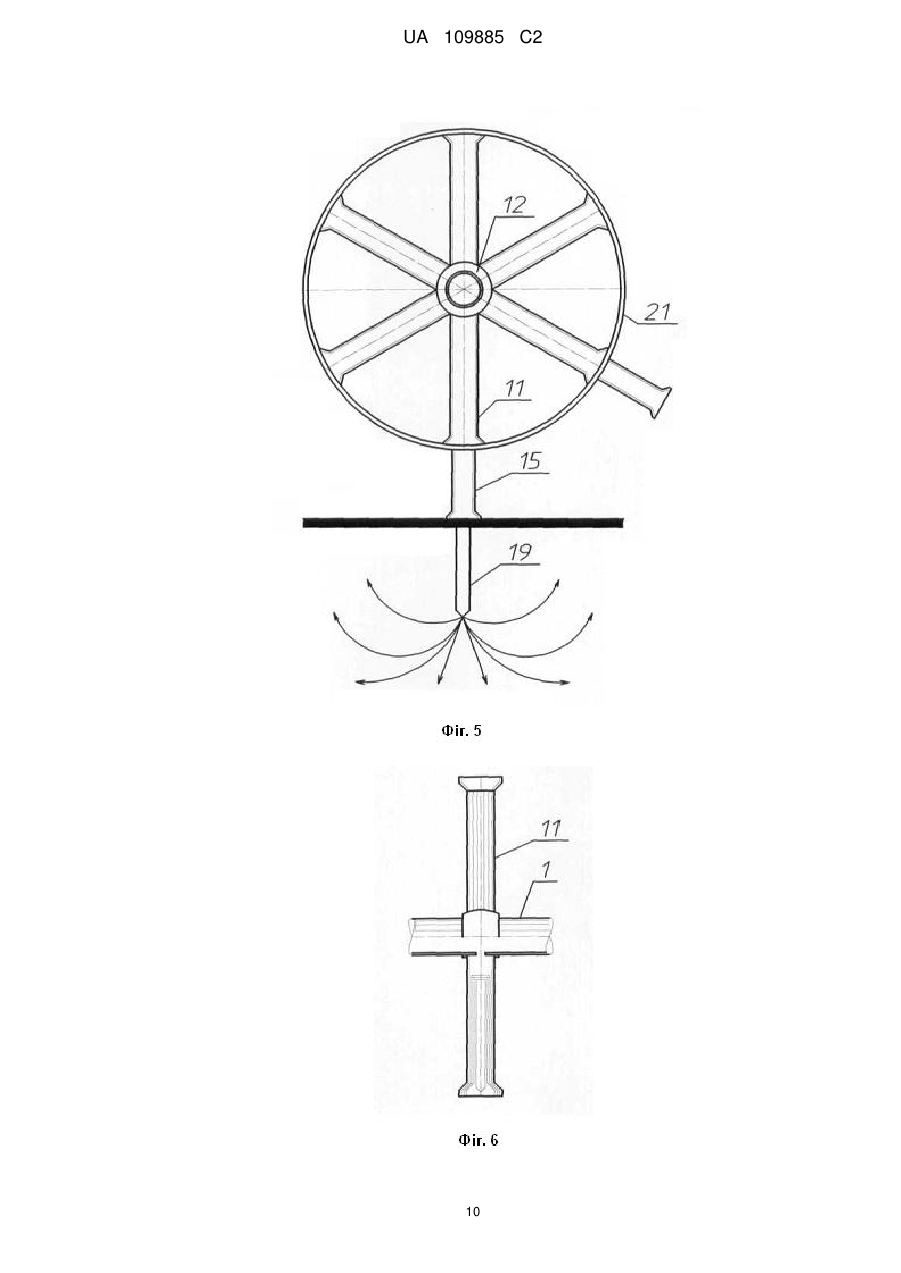
3. Агрегат за п. 1, в якому телескопічні апарати з форсунками з'єднані з поливним напірним водопроводом водоприймальними вузлами з ущільнюючими елементами кільцевого зразка, при цьому кожний апарат має необхідну кількість стволів, розміщених на монтажному ободі, в яких розташовані поршні з клапанами та поворотними пружинами, стакани з водоприймальними отворами, форсунки та упорні п'яти.
4. Агрегат за п. 1, в якому обидва колеса опорного самохідного візка та поливний напірний трубопровід з пустотілим валом роторно-поршневого гідродвигуна обертаються в одному циклі, при цьому на пустотілому валу розміщена подвійна зірочка, з′єднана з обома колесами опорного візка втулково-роликовою ланцюговою передачею, а конструкція коліс та їх кріплення до рами візка виконані з можливістю повороту коліс на 90 градусів.
Текст
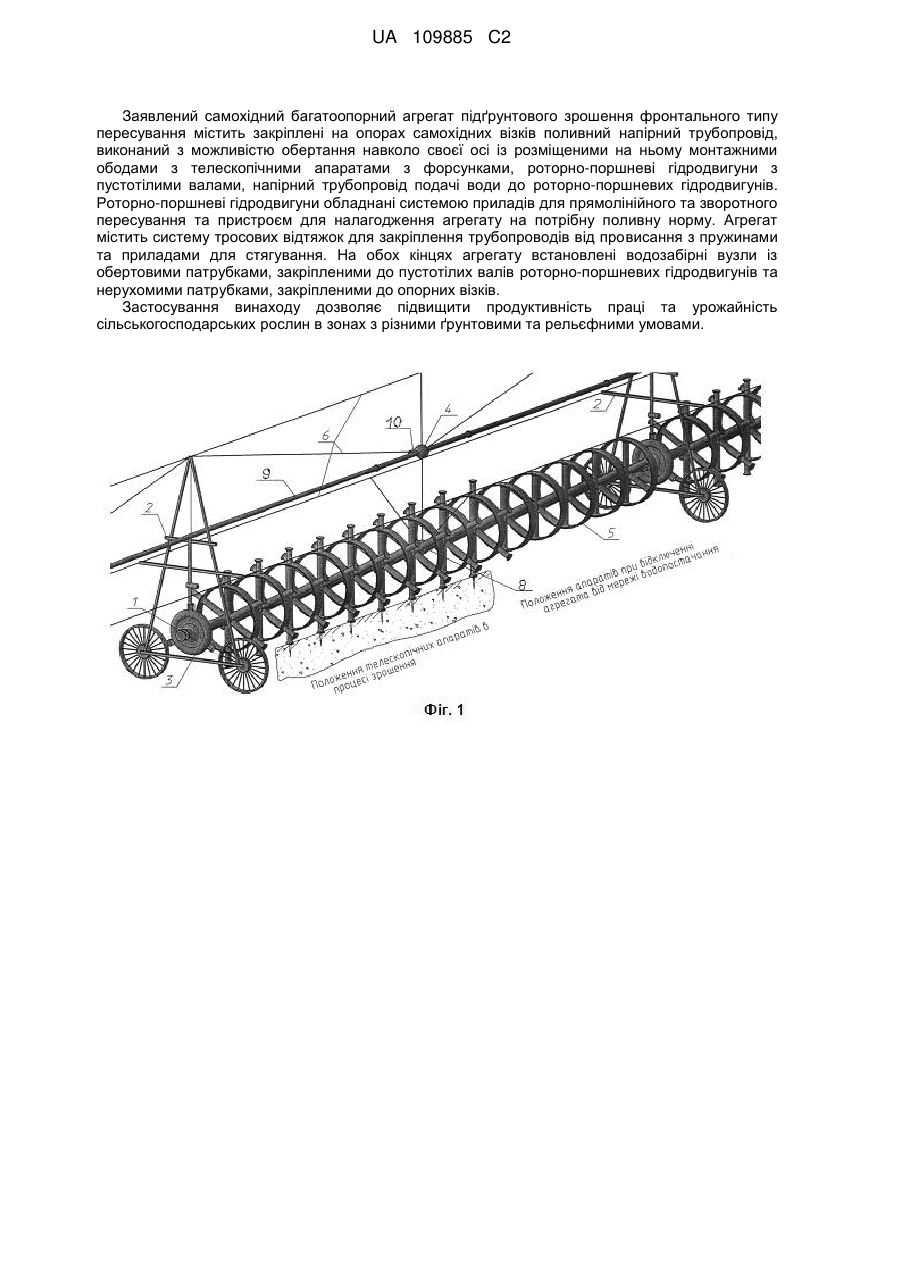
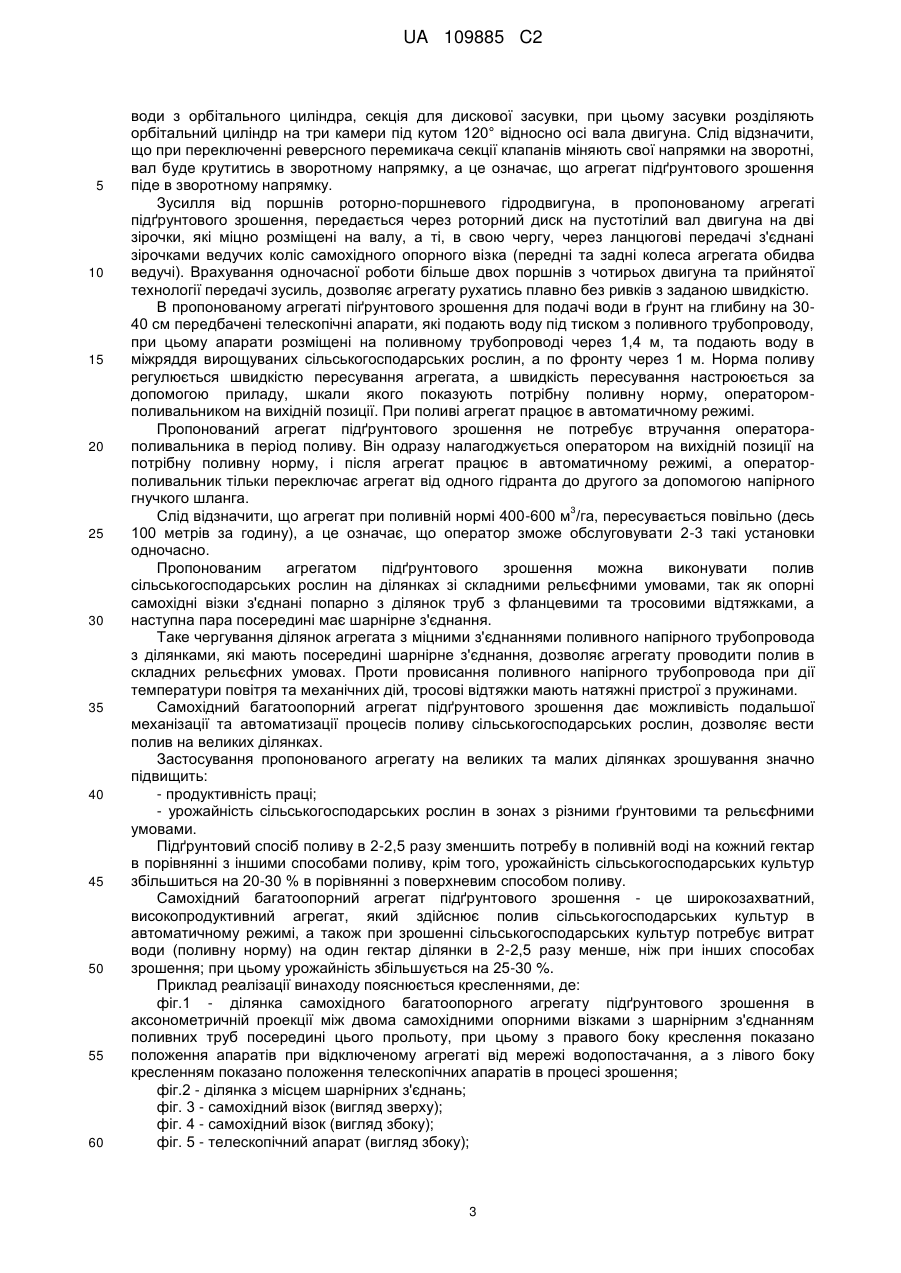
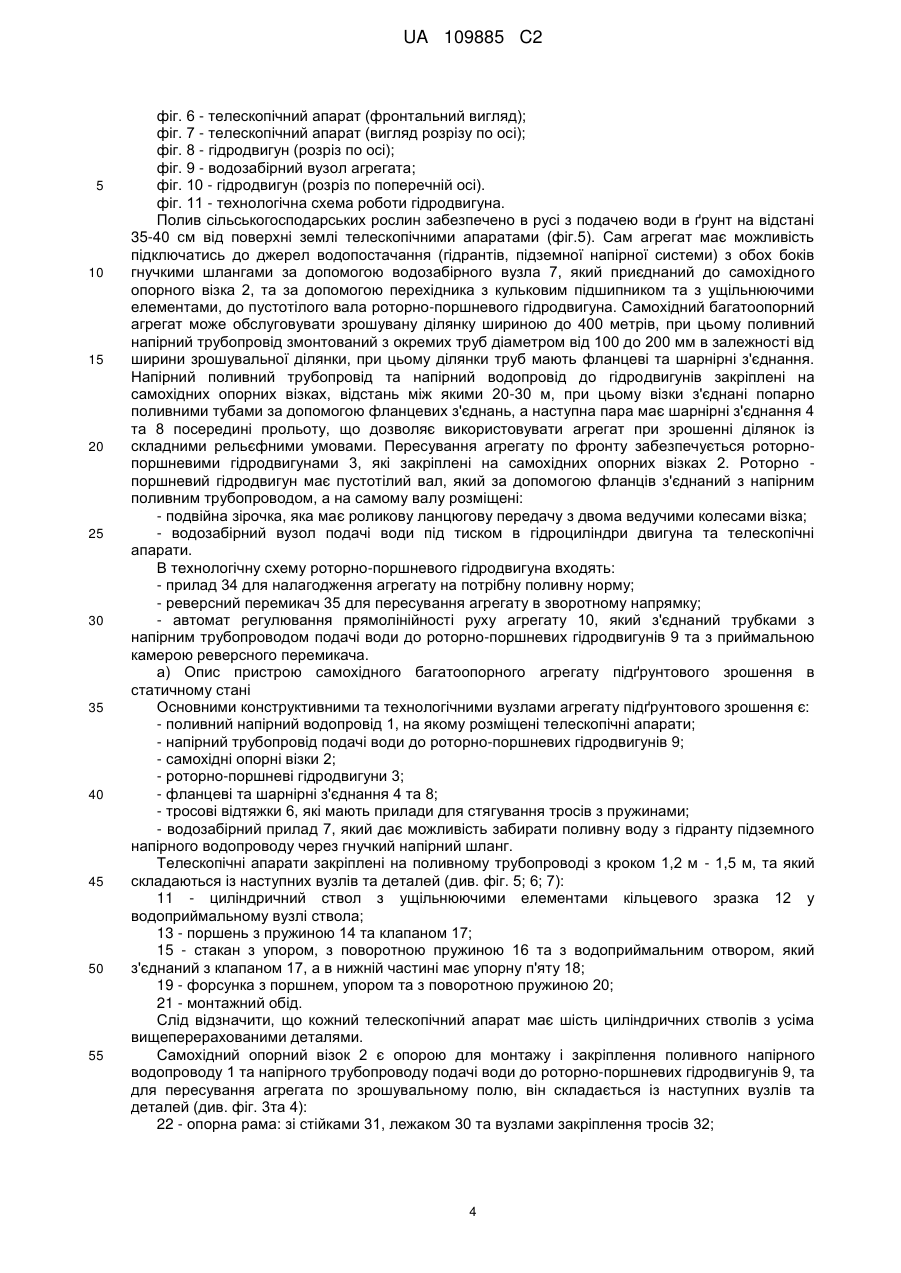
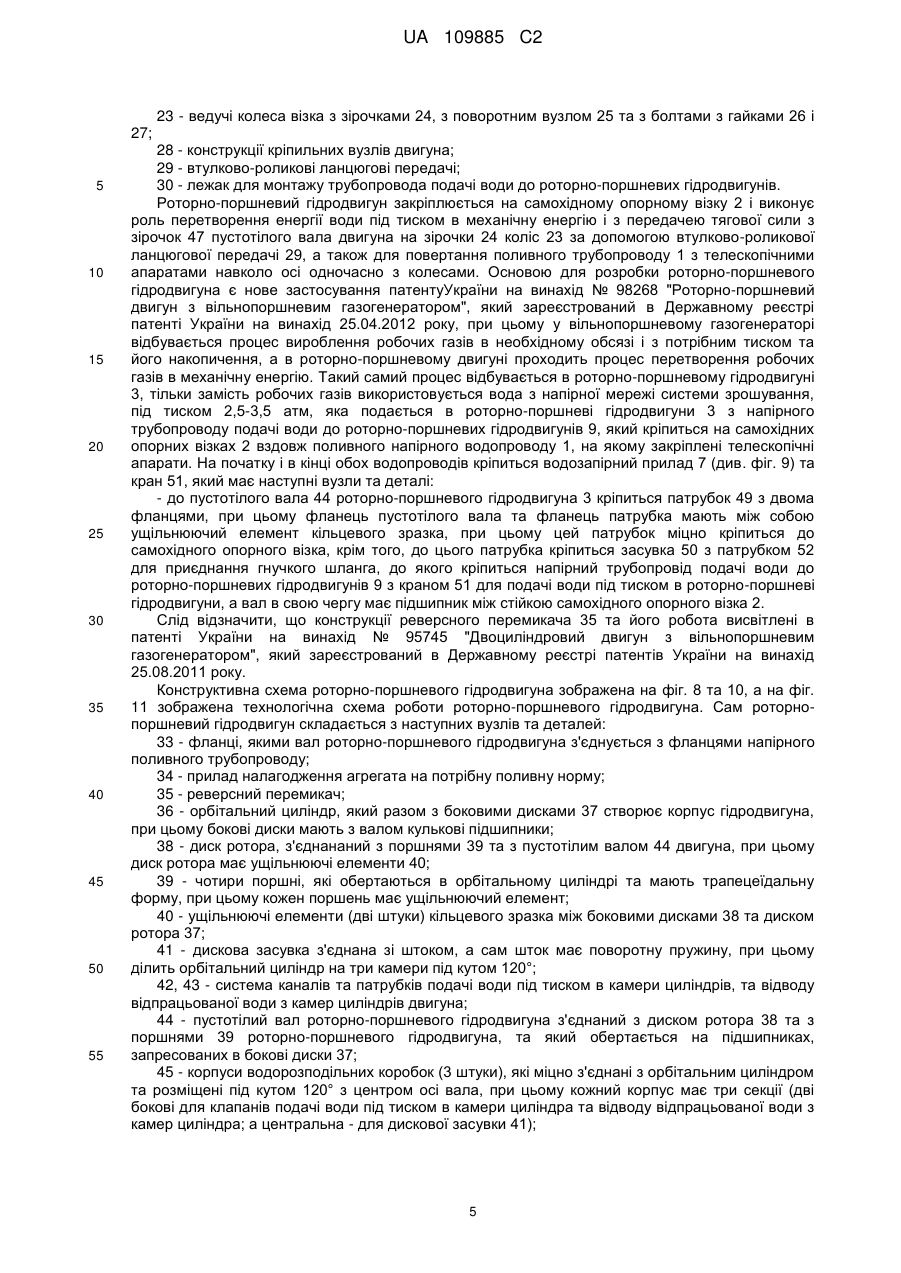
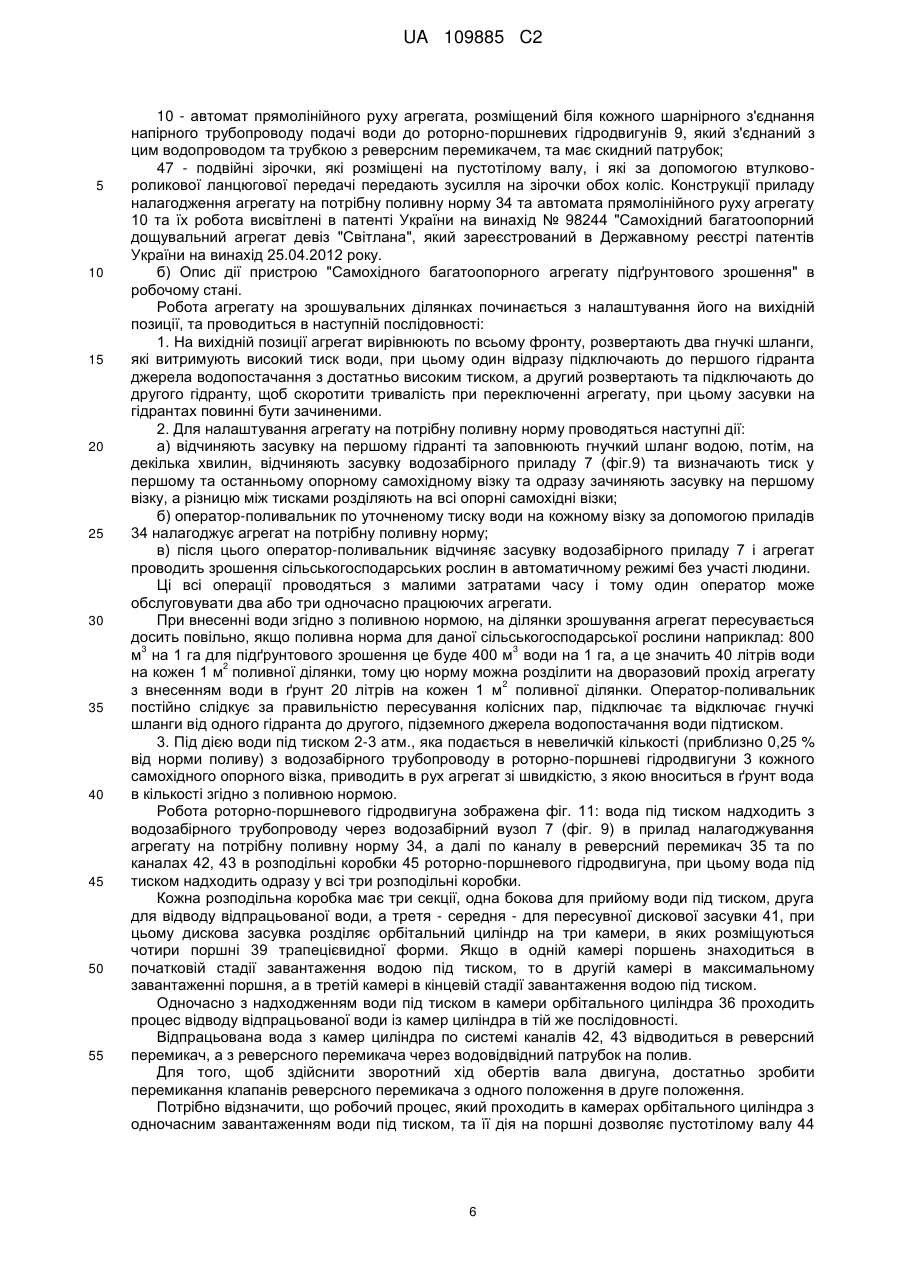
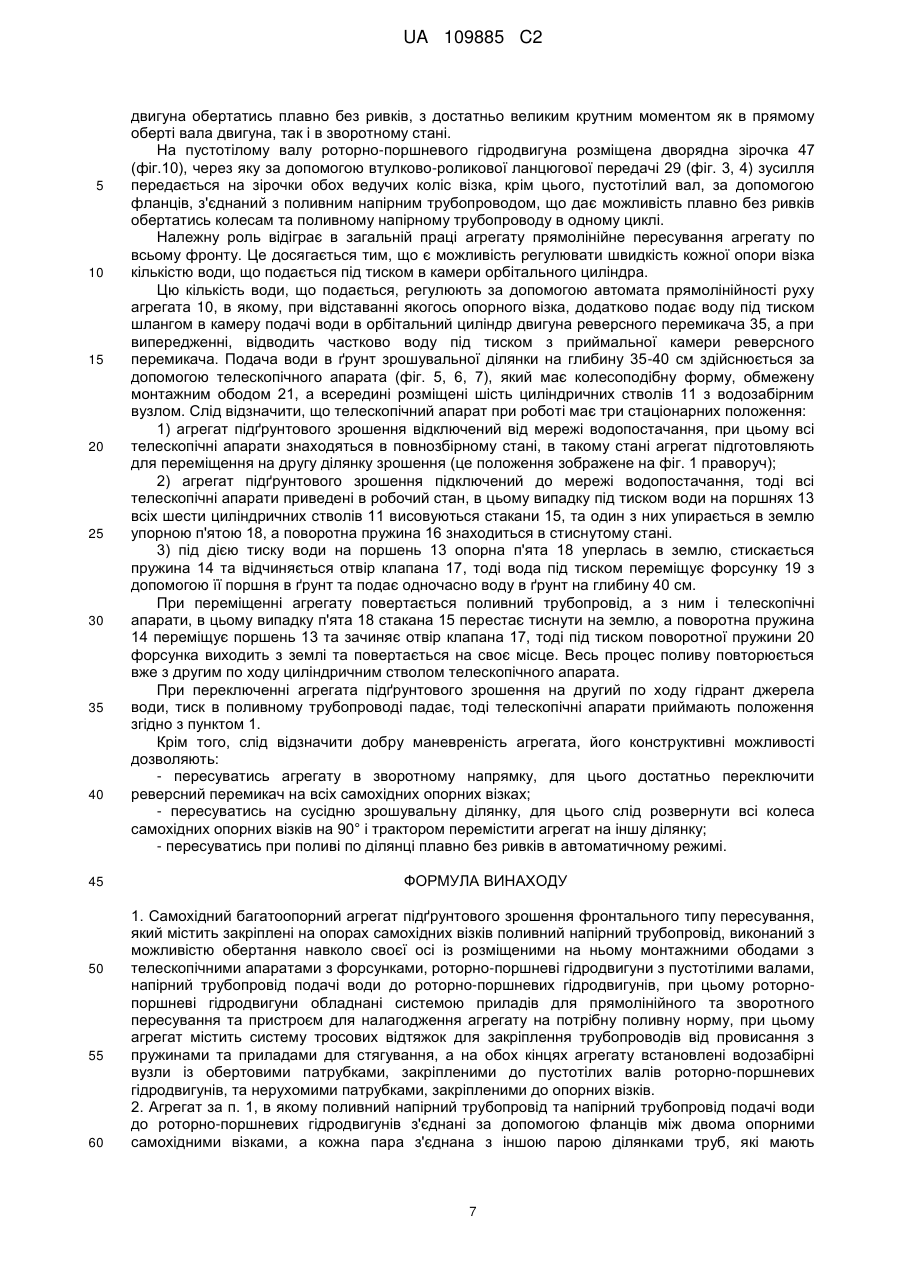
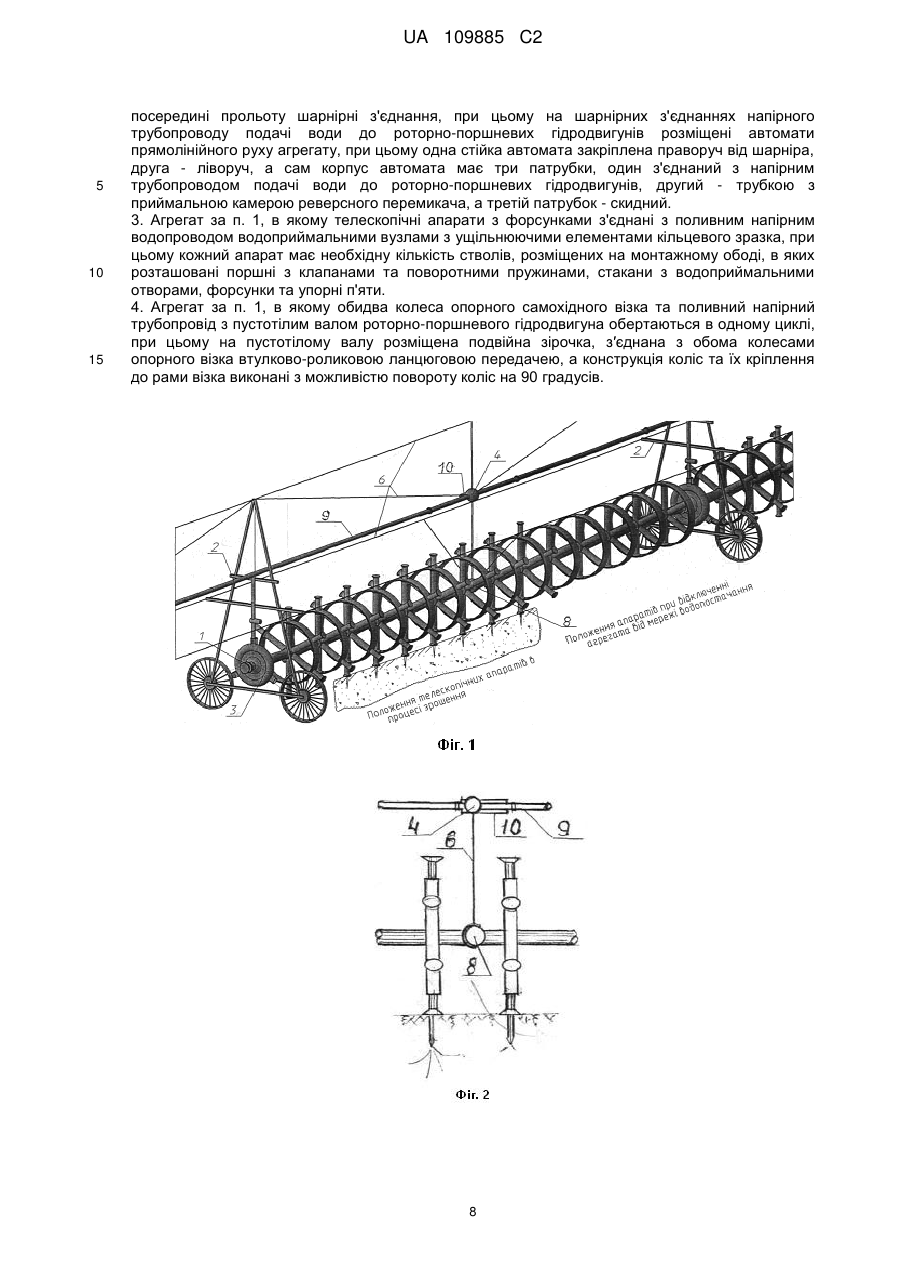
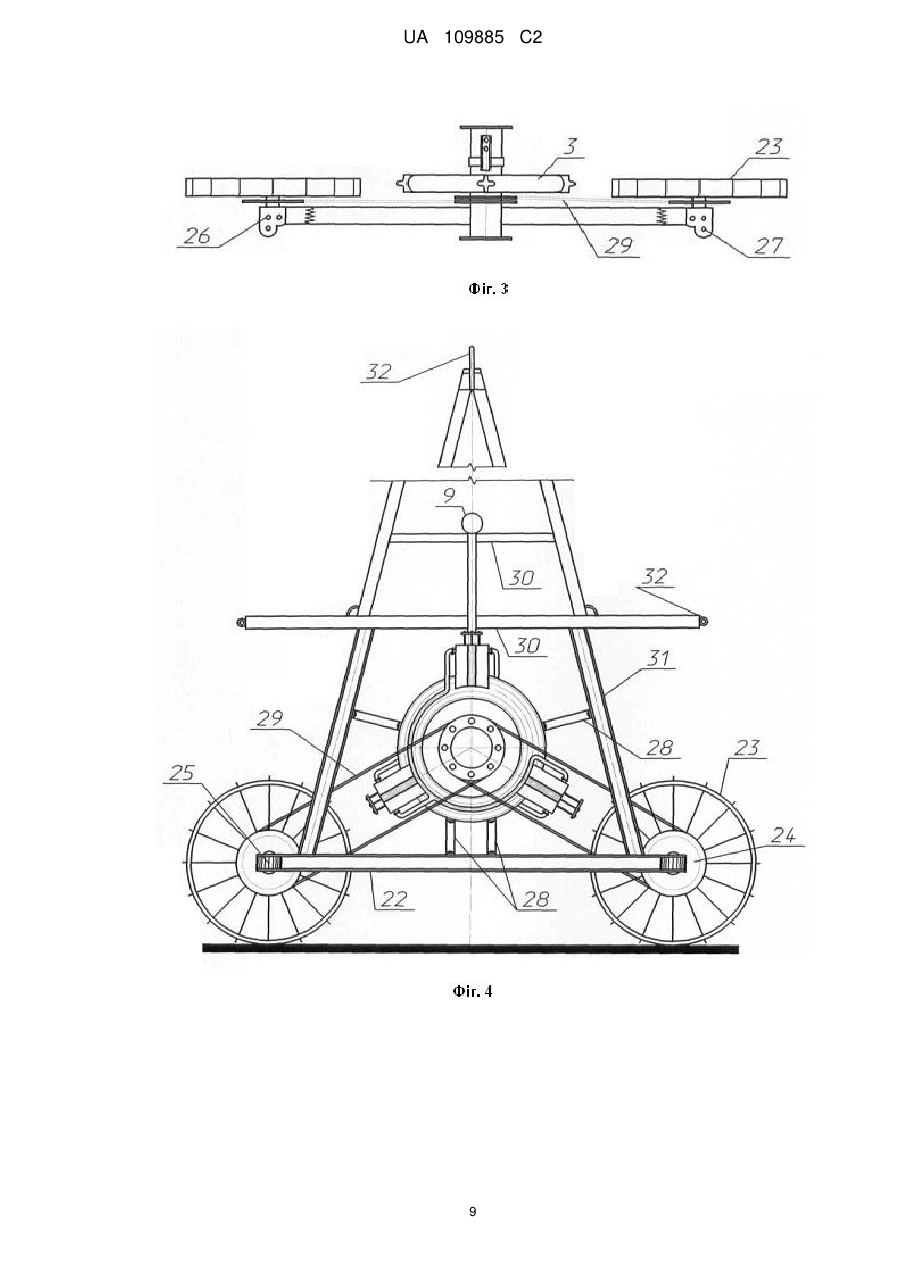
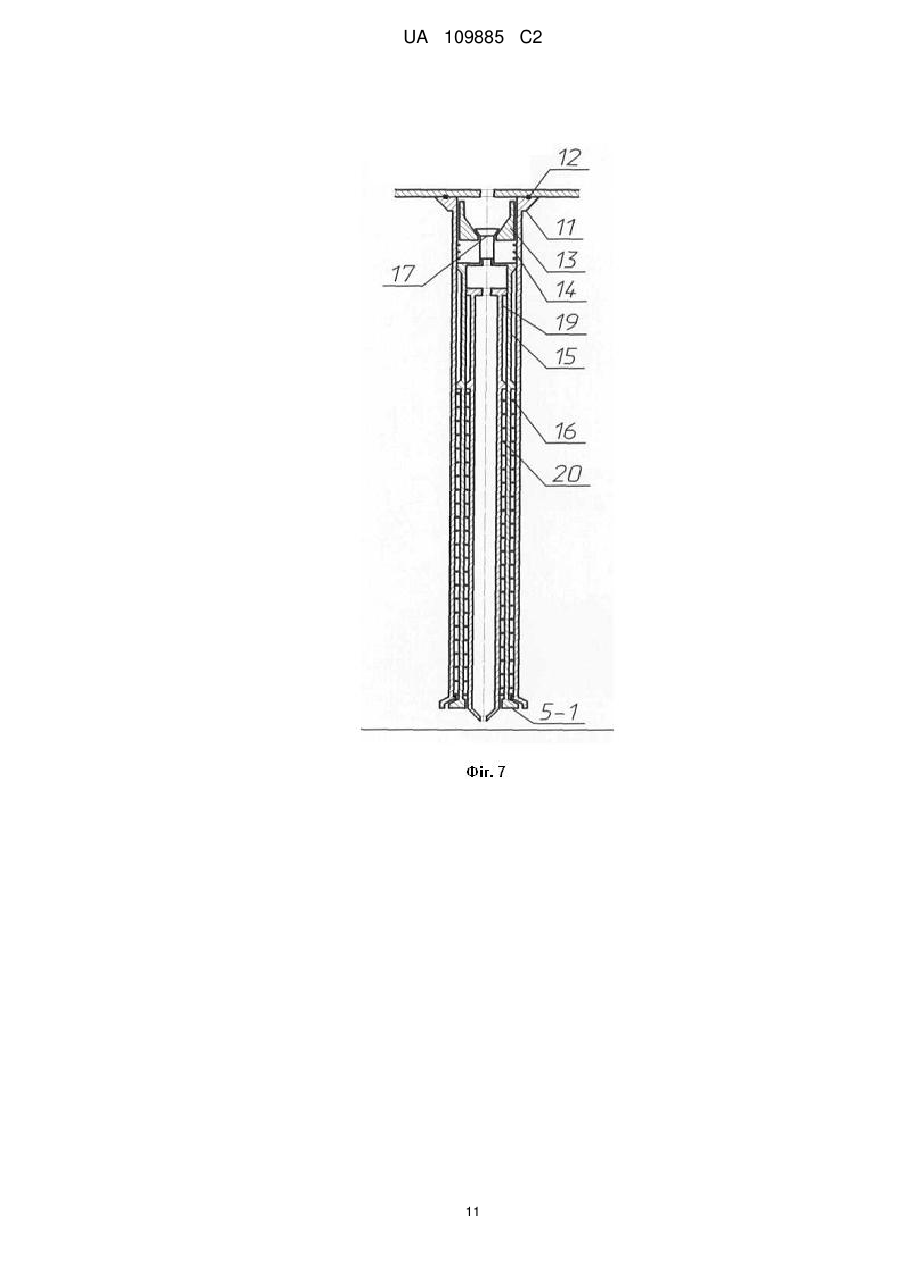
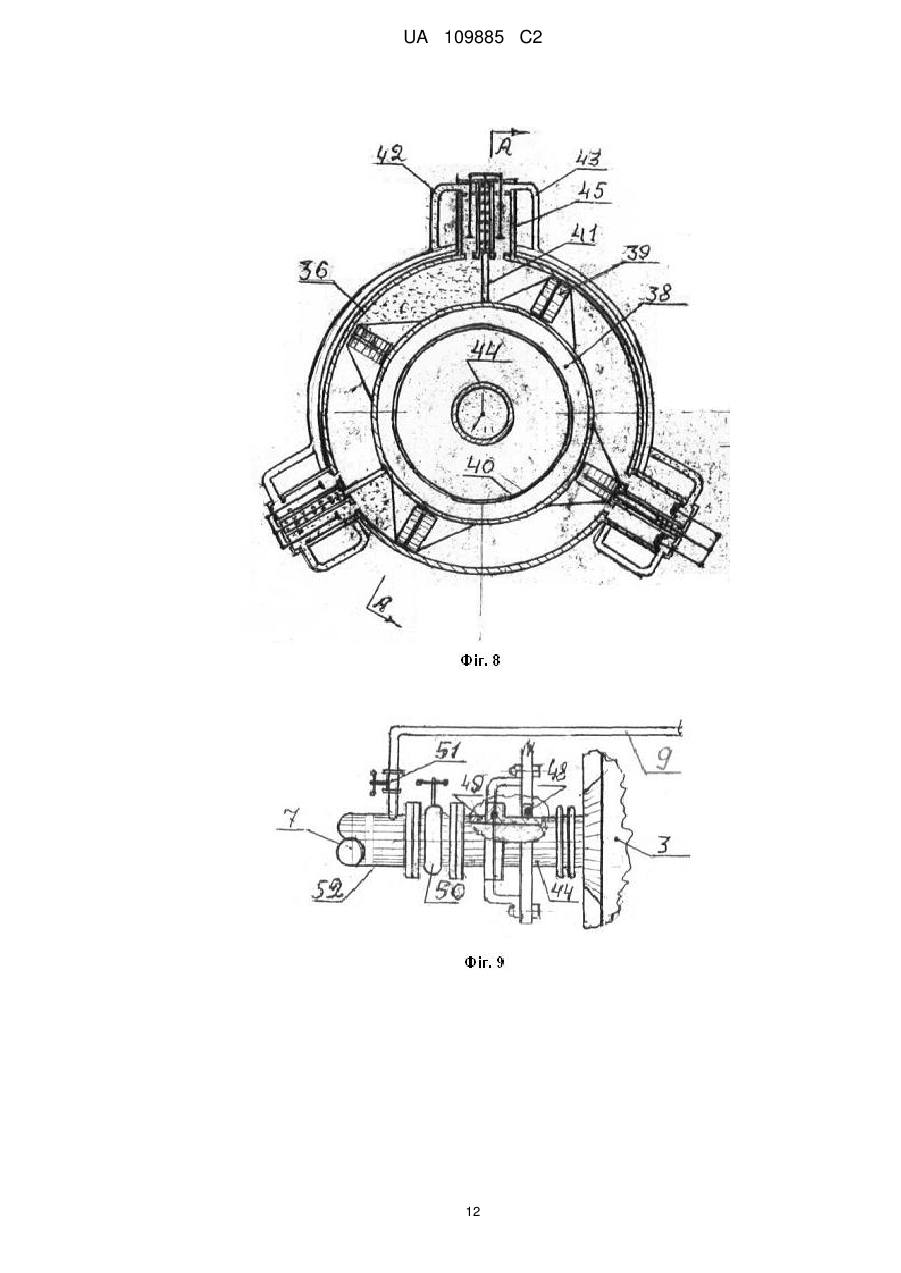
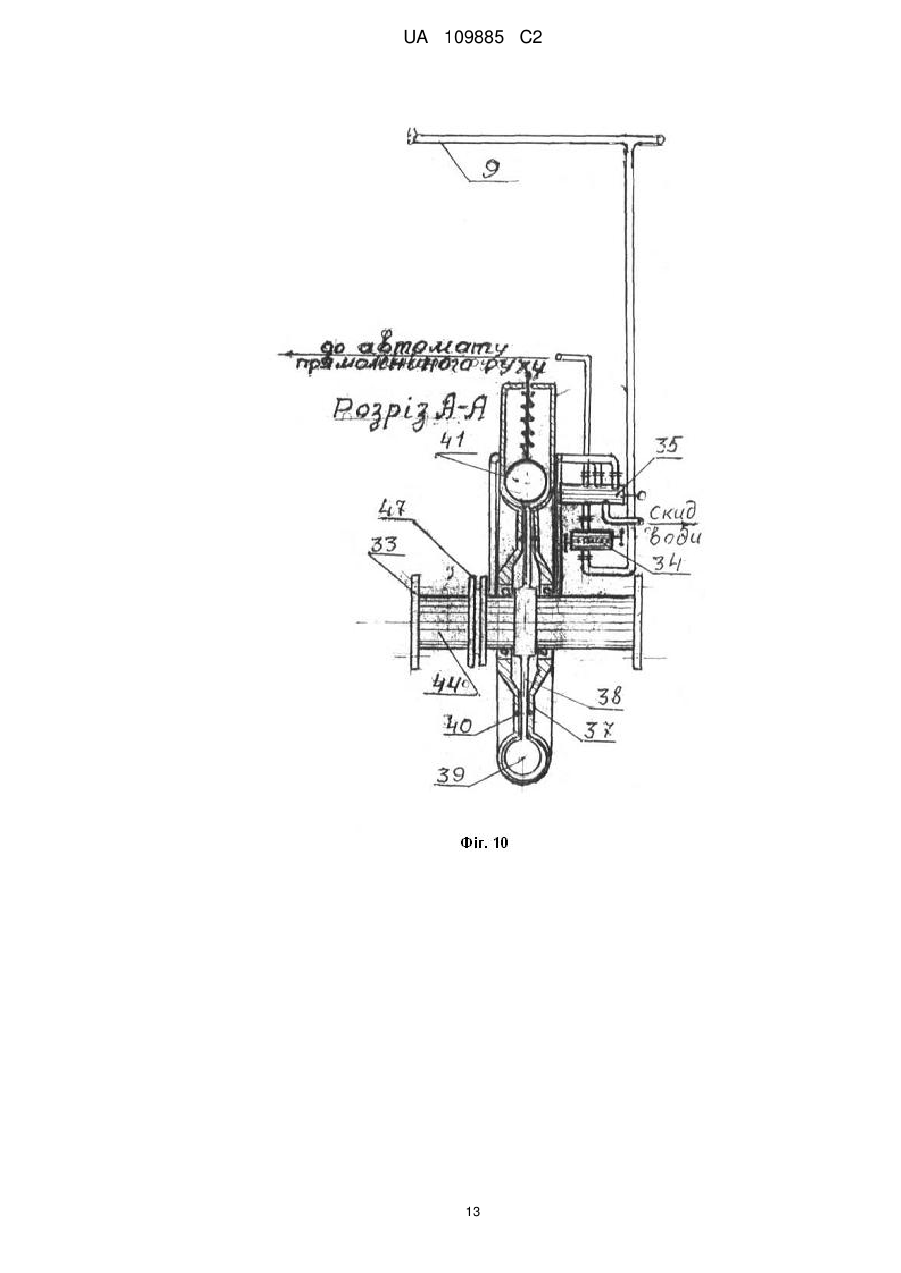
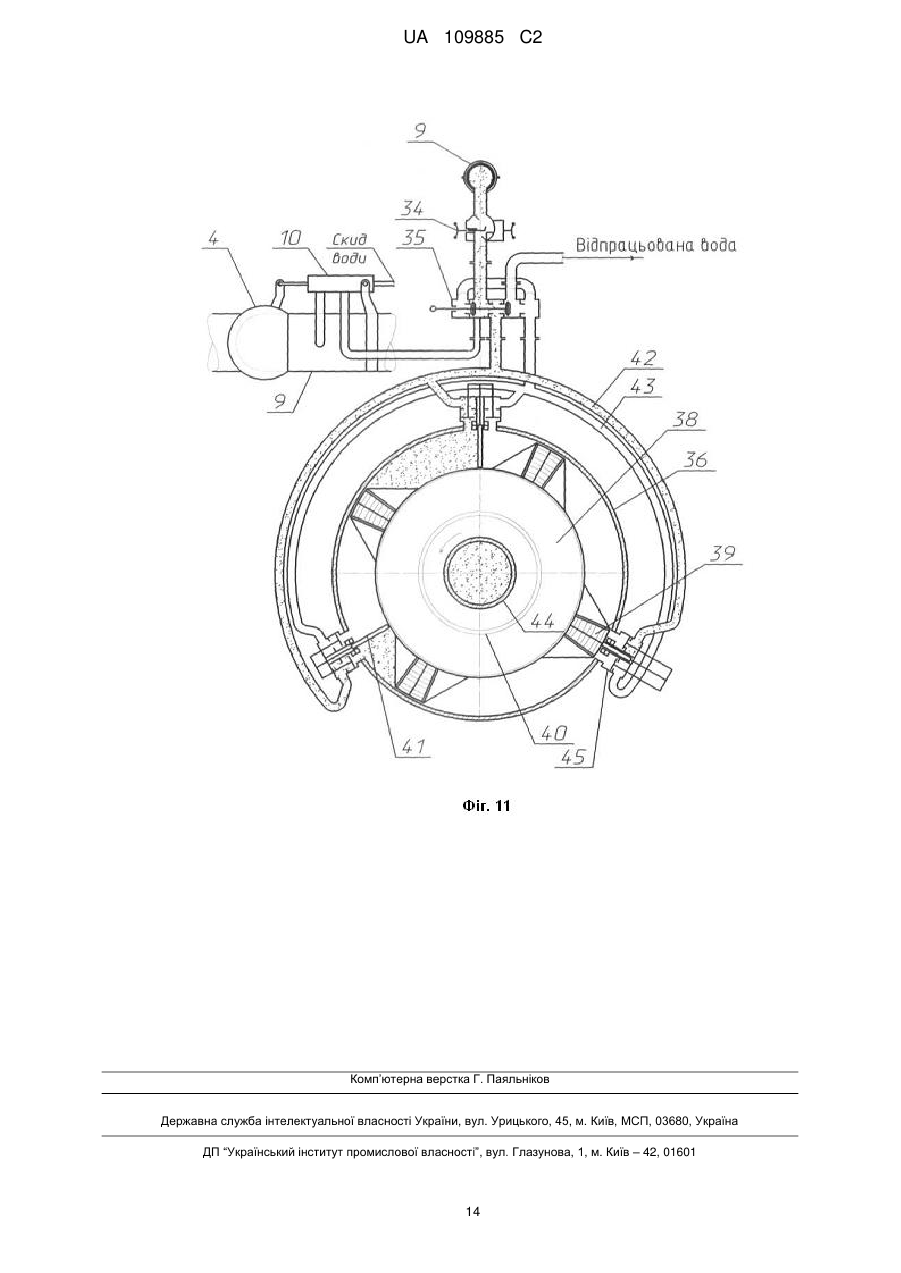
Реферат: Винахід належить до широкозахватної зрошувальної техніки та призначений для підґрунтового поливу в автоматичному режимі сільськогосподарських рослин в різних районах зрошувального землеробства з різними природно-кліматичними, ґрунтово-рельєфними і господарськими умовами. UA 109885 C2 (12) UA 109885 C2 Заявлений самохідний багатоопорний агрегат підґрунтового зрошення фронтального типу пересування містить закріплені на опорах самохідних візків поливний напірний трубопровід, виконаний з можливістю обертання навколо своєї осі із розміщеними на ньому монтажними ободами з телескопічними апаратами з форсунками, роторно-поршневі гідродвигуни з пустотілими валами, напірний трубопровід подачі води до роторно-поршневих гідродвигунів. Роторно-поршневі гідродвигуни обладнані системою приладів для прямолінійного та зворотного пересування та пристроєм для налагодження агрегату на потрібну поливну норму. Агрегат містить систему тросових відтяжок для закріплення трубопроводів від провисання з пружинами та приладами для стягування. На обох кінцях агрегату встановлені водозабірні вузли із обертовими патрубками, закріпленими до пустотілих валів роторно-поршневих гідродвигунів та нерухомими патрубками, закріпленими до опорних візків. Застосування винаходу дозволяє підвищити продуктивність праці та урожайність сільськогосподарських рослин в зонах з різними ґрунтовими та рельєфними умовами. UA 109885 C2 5 10 15 20 25 30 35 40 45 50 55 60 Самохідний багатоопорний агрегат підґрунтового зрошення належить до широкозахватної зрошувальної техніки та призначений для підґрунтового поливу в автоматичному режимі сільськогосподарських рослин в різних районах зрошувального землеробства з різними природно-кліматичними, ґрунтово-рельєфними і господарськими умовами. Для зрошування ґрунтів з різними сільськогосподарськими культурами в зонах із сухим кліматом використовують різні способи: - дощування за допомогою як стаціонарних, так і пересувних машин, агрегатів трубопроводів; - поверхові поливи сільськогосподарських рослин по борознах, по смугах, по чеках, по борознах-щілинах та ін.; - підґрунтовий полив - це спосіб поливу, при якому поливну воду подають безпосередньо в підкореневий шар ґрунту на глибину 0,4-0,5 м, а верхній шар змочується висхідними струменями капілярної вологи. Підґрунтове зрошення забезпечує найбільш раціональне споживання води рослинами, зберігає структуру ґрунту на його поверхні, дозволяє автоматизувати процес зрошення. Найбільш розповсюдженою є стаціонарна система підґрунтового зрошення з трубчатими зволожувачами, прокладеними всередині ґрунту трубопроводами, по яких вода розподіляється на зрошувальному полі. Найкращі показники досягаються при застосуванні пористих труб діаметром від 4 до 6 см. З таких зволожувачів вода надходить в ґрунт крізь пори стінок труб. Для забезпечення рівномірного розподілу води по шляху зволожувачів їх прокладають з малим нахилом і=0,001, а забезпечення водою зволожувачів виконується з підземних розподільних трубопроводів. Підтримка оптимального водно-повітряного режиму в активному шарі ґрунту за допомогою підґрунтового зрошення дозволяє підвищити врожайність сільськогосподарських культур, порівняно з іншими способами поливу, на 20-30 %, а застосування підґрунтового зрошення фірмою "Масандра" на ділянці 90 га забезпечило зростання врожаю винограду у 3 рази в порівнянні з незрошувальними умовами. Особливою перевагою стаціонарного підґрунтового зрошення в порівнянні з іншими техніками поливу є повна автоматизація процесу поливу. Слід відзначити, що підґрунтове зрошення має велику перевагу перед іншими системами зрошення: - для стаціонарних закритих систем - це повна автоматизація поливу; - застосування підґрунтового поливу дає можливість значно скоротити потреби води на один га (тобто норму поливу) в 2-2,5 разу. Наприклад: якщо при дощуванні потрібна норма поливу 3 3 400 м /га, то при підґрунтовому поливі це буде 200 м /га. При цьому стаціонарна закрита система має великі недоліки: пліснява, замулення та ріст водоростей в трубчастих зволожувачах, які значно скорочують строк експлуатації цих систем. Техніка підґрунтового зрошення сільськогосподарських земель на цьому рівні не досягла великих зрушень в її застосуванні. Великі потреби коштів на один гектар при будівництві стаціонарних систем підґрунтового зрошення з трубчатими зволожувачами, а також мала продуктивність пересувних машин підґрунтового зрошення не дала можливості їх широкому застосуванню на великих ділянках сільськогосподарських угідь. Задачею цього винаходу є досягнення наступних вимог: - підвищення високопродуктивності агрегату для підґрунтового зрошування; - подача води в підкореневий ґрунт з досить великою надійністю на глибину 35-40 см від поверхні поля в необхідній кількості, залежно від структури ґрунту, його вологості і залежно від сільськогосподарських рослин; - проведення зрошування в автоматичному режимі, з мінімальним використанням людської праці, тобто щоб один оператор-поливальник міг обслуговувати 2-3 працюючих агрегати одночасно. Поставлена задача вирішується завдяки тому, що самохідний багатоопорний агрегат підґрунтового зрошення фронтального типу пересування містить закріплені на опорах самохідних візків поливний напірний трубопровід, виконаний з можливістю обертання навколо своєї осі із розміщеними на ньому монтажними ободами з телескопічними апаратами з форсунками, роторно-поршневі гідродвигуни з пустотілими валами, напірний трубопровід подачі води до роторно-поршневих гідродвигунів, при цьому роторно-поршневі гідродвигуни обладнані системою приладів для прямолінійного та зворотного пересування та пристроєм для налагодження агрегату на потрібну поливну норму, при цьому агрегат містить систему тросових відтяжок для закріплення трубопроводів від провисання з пружинами та приладами для стягування, а на обох кінцях агрегату встановлені водозабірні вузли із обертовими патрубками, 1 UA 109885 C2 5 10 15 20 25 30 35 40 45 50 55 60 закріпленими до пустотілих валів роторно-поршневих гідродвигунів та нерухомими патрубками, закріпленими до опорних візків. До того ж, поливний напірний трубопровід та напірний трубопровід подачі води до роторнопоршневих гідродвигунів з'єднані за допомогою фланців між двома опорними самохідними візками, а кожна пара з'єднана з іншою парою ділянками труб, які мають посередині прольоту шарнірні з'єднання, при цьому на шарнірних з'єднаннях напірного трубопроводу подачі води до роторно-поршневих гідродвигунів розміщені автомати прямолінійного руху агрегату, при цьому одна стійка автомата закріплена праворуч від шарніра, друга - ліворуч, а сам корпус автомата має три патрубки, один з'єднаний з напірним трубопроводом подачі води до роторно-поршневих гідродвигунів, другий - трубкою з приймальною камерою реверсного перемикача, а третій патрубок - скидний. При цьому телескопічні апарати з форсунками з'єднані з поливним напірним водопроводом водоприймальними вузлами з ущільнюючими елементами кільцевого зразка, при цьому кожний апарат має необхідну кількість стволів, розміщених на монтажному ободі, в яких розташовані поршні з клапанами та поворотними пружинами, стакани з водоприймальними отворами, форсунки та упорні п'яти. До того ж обидва колеса опорного самохідного візка та поливний напірний трубопровід з пустотілим валом роторно-поршневого гідродвигуна обертаються в одному циклі, при цьому на пустотілому валу розміщена подвійна зірочка, з'єднана з обома колесами опорного візка втулково-роликовою ланцюговою передачею, а конструкція коліс та їх кріплення до рами візка, виконані з можливістю повороту коліс на 90 градусів. Пропонований агрегат містить роторно-поршневі гідродвигуни закріплені на самохідних опорних візках. Кожен роторно-поршневий гідродвигун має пустотілий вал з двома фланцями на кінцях, за допомогою яких він з'єднаний з поливним напірним трубопроводом, тиск води в якому 2-3 атмосфери. Крім того, на валу закріплена подвійна зірочка, яка за допомогою втулковороликової ланцюгової передачі передає зусилля на зірочки обох коліс візка. Необхідно відзначити, що поливний напірний трубопровід обертається разом з колесами візків в одному циклі. Сам роторно-поршневий гідродвигун має орбітальний циліндр, який разом з боковими дисками утворює корпус двигуна, при цьому в циліндрі пересуваються чотири поршні трапецеїдальної форми, які міцно з'єднані диском ротора з пустотілим валом двигуна. На корпусі орбітального циліндра закріплені три водорозподільні коробки, в яких розміщені дві секції з клапанами водорозподілу, та секція дискових засувів, які ділять орбітальний циліндр на три камери. Для забезпечення зворотного пересування агрегату, по каналах водоподачі передбачено реверсний перемикач. Система забезпечення водою роторно-поршневого гідродвигуна містить напірний водопровід, змонтований впродовж поливного напірного трубопроводу на самохідних візках та який забезпечується водою з водозабірних приладів агрегату, з подачею води по каналу в регулятор швидкості пересування агрегата, за допомогою якого оператором-поливальником проводиться налаштування руху самохідних опорних візків на необхідну поливну норму на вихідній позиції. В свою чергу, регулятор швидкості каналом з'єднаний з реверсним перемикачем, який має п'ять камер та два клапани, з'єднані між собою штоком, при цьому камера прийому води має відвідний патрубок до автомата регулювання прямолінійності пересування агрегату підґрунтового зрошення, при цьому цей автомат монтується на кожному шарнірному з'єднанні напірного трубопроводу. Слід відзначити, що при навіть невеликому порушенні прямолінійності пересування агрегату, автомат реагує миттєво. В деяких агрегатах це питання вирішено за допомогою коркових кранів, які працюють в залежності від натягу підтримуючих тросів, але в цьому випадку треба врахувати, що троси можуть послаблювати натяг не тільки при згинах трубопроводу, але і при температурних перепадах, що порушує працездатність всього агрегату. В пропонованому агрегаті поршні в орбітальному циліндрі гідродвигуна працюють як однотактні двигуни, в яких кожен оберт поршня є робочим. Роторно-поршневий гідродвигун містить чотири одночасно працюючих поршні в орбітальному циліндрі, при цьому слід відзначити, що як мінімум два поршні з чотирьох постійно знаходяться в максимальному завантаженні, що дозволяє агрегату підґрунтового зрошення пересуватись плавно без ривків із значною тяговою потужністю. В заявленому агрегаті підґрунтового зрошення впуск води під тиском в секції орбітального циліндра проходить за допомогою розподільчих коробок, кожна розподільча коробка має три секції: секція для клапана впуску води під тиском, секція для клапана випуску відпрацьованої 2 UA 109885 C2 5 10 15 20 25 30 35 40 45 50 55 60 води з орбітального циліндра, секція для дискової засувки, при цьому засувки розділяють орбітальний циліндр на три камери під кутом 120° відносно осі вала двигуна. Слід відзначити, що при переключенні реверсного перемикача секції клапанів міняють свої напрямки на зворотні, вал буде крутитись в зворотному напрямку, а це означає, що агрегат підґрунтового зрошення піде в зворотному напрямку. Зусилля від поршнів роторно-поршневого гідродвигуна, в пропонованому агрегаті підґрунтового зрошення, передається через роторний диск на пустотілий вал двигуна на дві зірочки, які міцно розміщені на валу, а ті, в свою чергу, через ланцюгові передачі з'єднані зірочками ведучих коліс самохідного опорного візка (передні та задні колеса агрегата обидва ведучі). Врахування одночасної роботи більше двох поршнів з чотирьох двигуна та прийнятої технології передачі зусиль, дозволяє агрегату рухатись плавно без ривків з заданою швидкістю. В пропонованому агрегаті піґрунтового зрошення для подачі води в ґрунт на глибину на 3040 см передбачені телескопічні апарати, які подають воду під тиском з поливного трубопроводу, при цьому апарати розміщені на поливному трубопроводі через 1,4 м, та подають воду в міжряддя вирощуваних сільськогосподарських рослин, а по фронту через 1 м. Норма поливу регулюється швидкістю пересування агрегата, а швидкість пересування настроюється за допомогою приладу, шкали якого показують потрібну поливну норму, операторомполивальником на вихідній позиції. При поливі агрегат працює в автоматичному режимі. Пропонований агрегат підґрунтового зрошення не потребує втручання оператораполивальника в період поливу. Він одразу налагоджується оператором на вихідній позиції на потрібну поливну норму, і після агрегат працює в автоматичному режимі, а операторполивальник тільки переключає агрегат від одного гідранта до другого за допомогою напірного гнучкого шланга. 3 Слід відзначити, що агрегат при поливній нормі 400-600 м /га, пересувається повільно (десь 100 метрів за годину), а це означає, що оператор зможе обслуговувати 2-3 такі установки одночасно. Пропонованим агрегатом підґрунтового зрошення можна виконувати полив сільськогосподарських рослин на ділянках зі складними рельєфними умовами, так як опорні самохідні візки з'єднані попарно з ділянок труб з фланцевими та тросовими відтяжками, а наступна пара посередині має шарнірне з'єднання. Таке чергування ділянок агрегата з міцними з'єднаннями поливного напірного трубопровода з ділянками, які мають посередині шарнірне з'єднання, дозволяє агрегату проводити полив в складних рельєфних умовах. Проти провисання поливного напірного трубопровода при дії температури повітря та механічних дій, тросові відтяжки мають натяжні пристрої з пружинами. Самохідний багатоопорний агрегат підґрунтового зрошення дає можливість подальшої механізації та автоматизації процесів поливу сільськогосподарських рослин, дозволяє вести полив на великих ділянках. Застосування пропонованого агрегату на великих та малих ділянках зрошування значно підвищить: - продуктивність праці; - урожайність сільськогосподарських рослин в зонах з різними ґрунтовими та рельєфними умовами. Підґрунтовий спосіб поливу в 2-2,5 разу зменшить потребу в поливній воді на кожний гектар в порівнянні з іншими способами поливу, крім того, урожайність сільськогосподарських культур збільшиться на 20-30 % в порівнянні з поверхневим способом поливу. Самохідний багатоопорний агрегат підґрунтового зрошення - це широкозахватний, високопродуктивний агрегат, який здійснює полив сільськогосподарських культур в автоматичному режимі, а також при зрошенні сільськогосподарських культур потребує витрат води (поливну норму) на один гектар ділянки в 2-2,5 разу менше, ніж при інших способах зрошення; при цьому урожайність збільшується на 25-30 %. Приклад реалізації винаходу пояснюється кресленнями, де: фіг.1 - ділянка самохідного багатоопорного агрегату підґрунтового зрошення в аксонометричній проекції між двома самохідними опорними візками з шарнірним з'єднанням поливних труб посередині цього прольоту, при цьому з правого боку креслення показано положення апаратів при відключеному агрегаті від мережі водопостачання, а з лівого боку кресленням показано положення телескопічних апаратів в процесі зрошення; фіг.2 - ділянка з місцем шарнірних з'єднань; фіг. 3 - самохідний візок (вигляд зверху); фіг. 4 - самохідний візок (вигляд збоку); фіг. 5 - телескопічний апарат (вигляд збоку); 3 UA 109885 C2 5 10 15 20 25 30 35 40 45 50 55 фіг. 6 - телескопічний апарат (фронтальний вигляд); фіг. 7 - телескопічний апарат (вигляд розрізу по осі); фіг. 8 - гідродвигун (розріз по осі); фіг. 9 - водозабірний вузол агрегата; фіг. 10 - гідродвигун (розріз по поперечній осі). фіг. 11 - технологічна схема роботи гідродвигуна. Полив сільськогосподарських рослин забезпечено в русі з подачею води в ґрунт на відстані 35-40 см від поверхні землі телескопічними апаратами (фіг.5). Сам агрегат має можливість підключатись до джерел водопостачання (гідрантів, підземної напірної системи) з обох боків гнучкими шлангами за допомогою водозабірного вузла 7, який приєднаний до самохідного опорного візка 2, та за допомогою перехідника з кульковим підшипником та з ущільнюючими елементами, до пустотілого вала роторно-поршневого гідродвигуна. Самохідний багатоопорний агрегат може обслуговувати зрошувану ділянку шириною до 400 метрів, при цьому поливний напірний трубопровід змонтований з окремих труб діаметром від 100 до 200 мм в залежності від ширини зрошувальної ділянки, при цьому ділянки труб мають фланцеві та шарнірні з'єднання. Напірний поливний трубопровід та напірний водопровід до гідродвигунів закріплені на самохідних опорних візках, відстань між якими 20-30 м, при цьому візки з'єднані попарно поливними тубами за допомогою фланцевих з'єднань, а наступна пара має шарнірні з'єднання 4 та 8 посередині прольоту, що дозволяє використовувати агрегат при зрошенні ділянок із складними рельєфними умовами. Пересування агрегату по фронту забезпечується роторнопоршневими гідродвигунами 3, які закріплені на самохідних опорних візках 2. Роторно поршневий гідродвигун має пустотілий вал, який за допомогою фланців з'єднаний з напірним поливним трубопроводом, а на самому валу розміщені: - подвійна зірочка, яка має роликову ланцюгову передачу з двома ведучими колесами візка; - водозабірний вузол подачі води під тиском в гідроциліндри двигуна та телескопічні апарати. В технологічну схему роторно-поршневого гідродвигуна входять: - прилад 34 для налагодження агрегату на потрібну поливну норму; - реверсний перемикач 35 для пересування агрегату в зворотному напрямку; - автомат регулювання прямолінійності руху агрегату 10, який з'єднаний трубками з напірним трубопроводом подачі води до роторно-поршневих гідродвигунів 9 та з приймальною камерою реверсного перемикача. а) Опис пристрою самохідного багатоопорного агрегату підґрунтового зрошення в статичному стані Основними конструктивними та технологічними вузлами агрегату підґрунтового зрошення є: - поливний напірний водопровід 1, на якому розміщені телескопічні апарати; - напірний трубопровід подачі води до роторно-поршневих гідродвигунів 9; - самохідні опорні візки 2; - роторно-поршневі гідродвигуни 3; - фланцеві та шарнірні з'єднання 4 та 8; - тросові відтяжки 6, які мають прилади для стягування тросів з пружинами; - водозабірний прилад 7, який дає можливість забирати поливну воду з гідранту підземного напірного водопроводу через гнучкий напірний шланг. Телескопічні апарати закріплені на поливному трубопроводі з кроком 1,2 м - 1,5 м, та який складаються із наступних вузлів та деталей (див. фіг. 5; 6; 7): 11 - циліндричний ствол з ущільнюючими елементами кільцевого зразка 12 у водоприймальному вузлі ствола; 13 - поршень з пружиною 14 та клапаном 17; 15 - стакан з упором, з поворотною пружиною 16 та з водоприймальним отвором, який з'єднаний з клапаном 17, а в нижній частині має упорну п'яту 18; 19 - форсунка з поршнем, упором та з поворотною пружиною 20; 21 - монтажний обід. Слід відзначити, що кожний телескопічний апарат має шість циліндричних стволів з усіма вищеперерахованими деталями. Самохідний опорний візок 2 є опорою для монтажу і закріплення поливного напірного водопроводу 1 та напірного трубопроводу подачі води до роторно-поршневих гідродвигунів 9, та для пересування агрегата по зрошувальному полю, він складається із наступних вузлів та деталей (див. фіг. 3та 4): 22 - опорна рама: зі стійками 31, лежаком 30 та вузлами закріплення тросів 32; 4 UA 109885 C2 23 - ведучі колеса візка з зірочками 24, з поворотним вузлом 25 та з болтами з гайками 26 і 27; 5 10 15 20 25 30 35 40 45 50 55 28 - конструкції кріпильних вузлів двигуна; 29 - втулково-роликові ланцюгові передачі; 30 - лежак для монтажу трубопровода подачі води до роторно-поршневих гідродвигунів. Роторно-поршневий гідродвигун закріплюється на самохідному опорному візку 2 і виконує роль перетворення енергії води під тиском в механічну енергію і з передачею тягової сили з зірочок 47 пустотілого вала двигуна на зірочки 24 коліс 23 за допомогою втулково-роликової ланцюгової передачі 29, а також для повертання поливного трубопроводу 1 з телескопічними апаратами навколо осі одночасно з колесами. Основою для розробки роторно-поршневого гідродвигуна є нове застосування патентуУкраїни на винахід № 98268 "Роторно-поршневий двигун з вільнопоршневим газогенератором", який зареєстрований в Державному реєстрі патенті України на винахід 25.04.2012 року, при цьому у вільнопоршневому газогенераторі відбувається процес вироблення робочих газів в необхідному обсязі і з потрібним тиском та його накопичення, а в роторно-поршневому двигуні проходить процес перетворення робочих газів в механічну енергію. Такий самий процес відбувається в роторно-поршневому гідродвигуні 3, тільки замість робочих газів використовується вода з напірної мережі системи зрошування, під тиском 2,5-3,5 атм, яка подається в роторно-поршневі гідродвигуни 3 з напірного трубопроводу подачі води до роторно-поршневих гідродвигунів 9, який кріпиться на самохідних опорних візках 2 вздовж поливного напірного водопроводу 1, на якому закріплені телескопічні апарати. На початку і в кінці обох водопроводів кріпиться водозапірний прилад 7 (див. фіг. 9) та кран 51, який має наступні вузли та деталі: - до пустотілого вала 44 роторно-поршневого гідродвигуна 3 кріпиться патрубок 49 з двома фланцями, при цьому фланець пустотілого вала та фланець патрубка мають між собою ущільнюючий елемент кільцевого зразка, при цьому цей патрубок міцно кріпиться до самохідного опорного візка, крім того, до цього патрубка кріпиться засувка 50 з патрубком 52 для приєднання гнучкого шланга, до якого кріпиться напірний трубопровід подачі води до роторно-поршневих гідродвигунів 9 з краном 51 для подачі води під тиском в роторно-поршневі гідродвигуни, а вал в свою чергу має підшипник між стійкою самохідного опорного візка 2. Слід відзначити, що конструкції реверсного перемикача 35 та його робота висвітлені в патенті України на винахід № 95745 "Двоциліндровий двигун з вільнопоршневим газогенератором", який зареєстрований в Державному реєстрі патентів України на винахід 25.08.2011 року. Конструктивна схема роторно-поршневого гідродвигуна зображена на фіг. 8 та 10, а на фіг. 11 зображена технологічна схема роботи роторно-поршневого гідродвигуна. Сам роторнопоршневий гідродвигун складається з наступних вузлів та деталей: 33 - фланці, якими вал роторно-поршневого гідродвигуна з'єднується з фланцями напірного поливного трубопроводу; 34 - прилад налагодження агрегата на потрібну поливну норму; 35 - реверсний перемикач; 36 - орбітальний циліндр, який разом з боковими дисками 37 створює корпус гідродвигуна, при цьому бокові диски мають з валом кулькові підшипники; 38 - диск ротора, з'єднананий з поршнями 39 та з пустотілим валом 44 двигуна, при цьому диск ротора має ущільнюючі елементи 40; 39 - чотири поршні, які обертаються в орбітальному циліндрі та мають трапецеїдальну форму, при цьому кожен поршень має ущільнюючий елемент; 40 - ущільнюючі елементи (дві штуки) кільцевого зразка між боковими дисками 38 та диском ротора 37; 41 - дискова засувка з'єднана зі штоком, а сам шток має поворотну пружину, при цьому ділить орбітальний циліндр на три камери під кутом 120°; 42, 43 - система каналів та патрубків подачі води під тиском в камери циліндрів, та відводу відпрацьованої води з камер циліндрів двигуна; 44 - пустотілий вал роторно-поршневого гідродвигуна з'єднаний з диском ротора 38 та з поршнями 39 роторно-поршневого гідродвигуна, та який обертається на підшипниках, запресованих в бокові диски 37; 45 - корпуси водорозподільних коробок (3 штуки), які міцно з'єднані з орбітальним циліндром та розміщені під кутом 120° з центром осі вала, при цьому кожний корпус має три секції (дві бокові для клапанів подачі води під тиском в камери циліндра та відводу відпрацьованої води з камер циліндра; а центральна - для дискової засувки 41); 5 UA 109885 C2 5 10 15 20 25 30 35 40 45 50 55 10 - автомат прямолінійного руху агрегата, розміщений біля кожного шарнірного з'єднання напірного трубопроводу подачі води до роторно-поршневих гідродвигунів 9, який з'єднаний з цим водопроводом та трубкою з реверсним перемикачем, та має скидний патрубок; 47 - подвійні зірочки, які розміщені на пустотілому валу, і які за допомогою втулковороликової ланцюгової передачі передають зусилля на зірочки обох коліс. Конструкції приладу налагодження агрегату на потрібну поливну норму 34 та автомата прямолінійного руху агрегату 10 та їх робота висвітлені в патенті України на винахід № 98244 "Самохідний багатоопорний дощувальний агрегат девіз "Світлана", який зареєстрований в Державному реєстрі патентів України на винахід 25.04.2012 року. б) Опис дії пристрою "Самохідного багатоопорного агрегату підґрунтового зрошення" в робочому стані. Робота агрегату на зрошувальних ділянках починається з налаштування його на вихідній позиції, та проводиться в наступній послідовності: 1. На вихідній позиції агрегат вирівнюють по всьому фронту, розвертають два гнучкі шланги, які витримують високий тиск води, при цьому один відразу підключають до першого гідранта джерела водопостачання з достатньо високим тиском, а другий розвертають та підключають до другого гідранту, щоб скоротити тривалість при переключенні агрегату, при цьому засувки на гідрантах повинні бути зачиненими. 2. Для налаштування агрегату на потрібну поливну норму проводяться наступні дії: а) відчиняють засувку на першому гідранті та заповнюють гнучкий шланг водою, потім, на декілька хвилин, відчиняють засувку водозабірного приладу 7 (фіг.9) та визначають тиск у першому та останньому опорному самохідному візку та одразу зачиняють засувку на першому візку, а різницю між тисками розділяють на всі опорні самохідні візки; б) оператор-поливальник по уточненому тиску води на кожному візку за допомогою приладів 34 налагоджує агрегат на потрібну поливну норму; в) після цього оператор-поливальник відчиняє засувку водозабірного приладу 7 і агрегат проводить зрошення сільськогосподарських рослин в автоматичному режимі без участі людини. Ці всі операції проводяться з малими затратами часу і тому один оператор може обслуговувати два або три одночасно працюючих агрегати. При внесенні води згідно з поливною нормою, на ділянки зрошування агрегат пересувається досить повільно, якщо поливна норма для даної сільськогосподарської рослини наприклад: 800 3 3 м на 1 га для підґрунтового зрошення це буде 400 м води на 1 га, а це значить 40 літрів води 2 на кожен 1 м поливної ділянки, тому цю норму можна розділити на дворазовий прохід агрегату 2 з внесенням води в ґрунт 20 літрів на кожен 1 м поливної ділянки. Оператор-поливальник постійно слідкує за правильністю пересування колісних пар, підключає та відключає гнучкі шланги від одного гідранта до другого, підземного джерела водопостачання води підтиском. 3. Під дією води під тиском 2-3 атм., яка подається в невеличкій кількості (приблизно 0,25 % від норми поливу) з водозабірного трубопроводу в роторно-поршневі гідродвигуни 3 кожного самохідного опорного візка, приводить в рух агрегат зі швидкістю, з якою вноситься в ґрунт вода в кількості згідно з поливною нормою. Робота роторно-поршневого гідродвигуна зображена фіг. 11: вода під тиском надходить з водозабірного трубопроводу через водозабірний вузол 7 (фіг. 9) в прилад налагоджування агрегату на потрібну поливну норму 34, а далі по каналу в реверсний перемикач 35 та по каналах 42, 43 в розподільні коробки 45 роторно-поршневого гідродвигуна, при цьому вода під тиском надходить одразу у всі три розподільні коробки. Кожна розподільна коробка має три секції, одна бокова для прийому води під тиском, друга для відводу відпрацьованої води, а третя - середня - для пересувної дискової засувки 41, при цьому дискова засувка розділяє орбітальний циліндр на три камери, в яких розміщуються чотири поршні 39 трапецієвидної форми. Якщо в одній камері поршень знаходиться в початковій стадії завантаження водою під тиском, то в другій камері в максимальному завантаженні поршня, а в третій камері в кінцевій стадії завантаження водою під тиском. Одночасно з надходженням води під тиском в камери орбітального циліндра 36 проходить процес відводу відпрацьованої води із камер циліндра в тій же послідовності. Відпрацьована вода з камер циліндра по системі каналів 42, 43 відводиться в реверсний перемикач, а з реверсного перемикача через водовідвідний патрубок на полив. Для того, щоб здійснити зворотний хід обертів вала двигуна, достатньо зробити перемикання клапанів реверсного перемикача з одного положення в друге положення. Потрібно відзначити, що робочий процес, який проходить в камерах орбітального циліндра з одночасним завантаженням води під тиском, та її дія на поршні дозволяє пустотілому валу 44 6 UA 109885 C2 5 10 15 20 25 30 35 40 45 50 55 60 двигуна обертатись плавно без ривків, з достатньо великим крутним моментом як в прямому оберті вала двигуна, так і в зворотному стані. На пустотілому валу роторно-поршневого гідродвигуна розміщена дворядна зірочка 47 (фіг.10), через яку за допомогою втулково-роликової ланцюгової передачі 29 (фіг. 3, 4) зусилля передається на зірочки обох ведучих коліс візка, крім цього, пустотілий вал, за допомогою фланців, з'єднаний з поливним напірним трубопроводом, що дає можливість плавно без ривків обертатись колесам та поливному напірному трубопроводу в одному циклі. Належну роль відіграє в загальній праці агрегату прямолінійне пересування агрегату по всьому фронту. Це досягається тим, що є можливість регулювати швидкість кожної опори візка кількістю води, що подається під тиском в камери орбітального циліндра. Цю кількість води, що подається, регулюють за допомогою автомата прямолінійності руху агрегата 10, в якому, при відставанні якогось опорного візка, додатково подає воду під тиском шлангом в камеру подачі води в орбітальний циліндр двигуна реверсного перемикача 35, а при випередженні, відводить частково воду під тиском з приймальної камери реверсного перемикача. Подача води в ґрунт зрошувальної ділянки на глибину 35-40 см здійснюється за допомогою телескопічного апарата (фіг. 5, 6, 7), який має колесоподібну форму, обмежену монтажним ободом 21, а всередині розміщені шість циліндричних стволів 11 з водозабірним вузлом. Слід відзначити, що телескопічний апарат при роботі має три стаціонарних положення: 1) агрегат підґрунтового зрошення відключений від мережі водопостачання, при цьому всі телескопічні апарати знаходяться в повнозбірному стані, в такому стані агрегат підготовляють для переміщення на другу ділянку зрошення (це положення зображене на фіг. 1 праворуч); 2) агрегат підґрунтового зрошення підключений до мережі водопостачання, тоді всі телескопічні апарати приведені в робочий стан, в цьому випадку під тиском води на поршнях 13 всіх шести циліндричних стволів 11 висовуються стакани 15, та один з них упирається в землю упорною п'ятою 18, а поворотна пружина 16 знаходиться в стиснутому стані. 3) під дією тиску води на поршень 13 опорна п'ята 18 уперлась в землю, стискається пружина 14 та відчиняється отвір клапана 17, тоді вода під тиском переміщує форсунку 19 з допомогою її поршня в ґрунт та подає одночасно воду в ґрунт на глибину 40 см. При переміщенні агрегату повертається поливний трубопровід, а з ним і телескопічні апарати, в цьому випадку п'ята 18 стакана 15 перестає тиснути на землю, а поворотна пружина 14 переміщує поршень 13 та зачиняє отвір клапана 17, тоді під тиском поворотної пружини 20 форсунка виходить з землі та повертається на своє місце. Весь процес поливу повторюється вже з другим по ходу циліндричним стволом телескопічного апарата. При переключенні агрегата підґрунтового зрошення на другий по ходу гідрант джерела води, тиск в поливному трубопроводі падає, тоді телескопічні апарати приймають положення згідно з пунктом 1. Крім того, слід відзначити добру маневреність агрегата, його конструктивні можливості дозволяють: - пересуватись агрегату в зворотному напрямку, для цього достатньо переключити реверсний перемикач на всіх самохідних опорних візках; - пересуватись на сусідню зрошувальну ділянку, для цього слід розвернути всі колеса самохідних опорних візків на 90° і трактором перемістити агрегат на іншу ділянку; - пересуватись при поливі по ділянці плавно без ривків в автоматичному режимі. ФОРМУЛА ВИНАХОДУ 1. Самохідний багатоопорний агрегат підґрунтового зрошення фронтального типу пересування, який містить закріплені на опорах самохідних візків поливний напірний трубопровід, виконаний з можливістю обертання навколо своєї осі із розміщеними на ньому монтажними ободами з телескопічними апаратами з форсунками, роторно-поршневі гідродвигуни з пустотілими валами, напірний трубопровід подачі води до роторно-поршневих гідродвигунів, при цьому роторнопоршневі гідродвигуни обладнані системою приладів для прямолінійного та зворотного пересування та пристроєм для налагодження агрегату на потрібну поливну норму, при цьому агрегат містить систему тросових відтяжок для закріплення трубопроводів від провисання з пружинами та приладами для стягування, а на обох кінцях агрегату встановлені водозабірні вузли із обертовими патрубками, закріпленими до пустотілих валів роторно-поршневих гідродвигунів, та нерухомими патрубками, закріпленими до опорних візків. 2. Агрегат за п. 1, в якому поливний напірний трубопровід та напірний трубопровід подачі води до роторно-поршневих гідродвигунів з'єднані за допомогою фланців між двома опорними самохідними візками, а кожна пара з'єднана з іншою парою ділянками труб, які мають 7 UA 109885 C2 5 10 15 посередині прольоту шарнірні з'єднання, при цьому на шарнірних з'єднаннях напірного трубопроводу подачі води до роторно-поршневих гідродвигунів розміщені автомати прямолінійного руху агрегату, при цьому одна стійка автомата закріплена праворуч від шарніра, друга - ліворуч, а сам корпус автомата має три патрубки, один з'єднаний з напірним трубопроводом подачі води до роторно-поршневих гідродвигунів, другий - трубкою з приймальною камерою реверсного перемикача, а третій патрубок - скидний. 3. Агрегат за п. 1, в якому телескопічні апарати з форсунками з'єднані з поливним напірним водопроводом водоприймальними вузлами з ущільнюючими елементами кільцевого зразка, при цьому кожний апарат має необхідну кількість стволів, розміщених на монтажному ободі, в яких розташовані поршні з клапанами та поворотними пружинами, стакани з водоприймальними отворами, форсунки та упорні п'яти. 4. Агрегат за п. 1, в якому обидва колеса опорного самохідного візка та поливний напірний трубопровід з пустотілим валом роторно-поршневого гідродвигуна обертаються в одному циклі, при цьому на пустотілому валу розміщена подвійна зірочка, з′єднана з обома колесами опорного візка втулково-роликовою ланцюговою передачею, а конструкція коліс та їх кріплення до рами візка виконані з можливістю повороту коліс на 90 градусів. 8 UA 109885 C2 9 UA 109885 C2 10 UA 109885 C2 11 UA 109885 C2 12 UA 109885 C2 13 UA 109885 C2 Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 14
ДивитисяДодаткова інформація
Назва патенту англійськоюSelf-propelled multiple-seated unit of subsoil irrigation
Автори англійськоюSerafymovych Pavlo Makarovych, Doroshenko Svitlana Pavlivna, Doroshenko Andrii Oleksandrovych, Dovha Stefania Yuriivna
Назва патенту російськоюСамоходный многоопорный агрегат подпочвенного орошения
Автори російськоюСерафимович Павел Макарович, Дорошенко Светлана Павловна, Дорошенко Андрей Александрович, Довга Стефания Юрьевна
МПК / Мітки
МПК: A01G 25/09, A01G 25/06, A01C 23/02
Мітки: самохідний, підґрунтового, агрегат, зрошування, багатоопорний
Код посилання
<a href="https://ua.patents.su/16-109885-samokhidnijj-bagatoopornijj-agregat-pidruntovogo-zroshuvannya.html" target="_blank" rel="follow" title="База патентів України">Самохідний багатоопорний агрегат підґрунтового зрошування</a>
Самохідний багатоопорний дощувальний агрегат девіз “світлана”
Номер патенту: 98244
Опубліковано: 25.04.2012
Автори: Довга Стефанія Юріївна, Дорошенко Андрій Олександрович, Серафимович Павло Макарович, Дорошенко Світлана Павлівна
МПК: A01G 25/09
Мітки: самохідний, девіз, багатоопорний, агрегат, дощувальний, світлана
Формула / Реферат:
1. Самохідний багатоопорний дощувальний агрегат фронтального типу пересування, який включає трубопровід з дощувальними насадками, який закріплений на А-подібних опорах самохідних візків і змонтований з ділянок труб з фланцевими та шарнірними з'єднаннями,двоциліндрові гідродвигуни, які закріплені на самохідних візках, систему приладів забезпечення водою під тиском з поливного трубопровода, систему приладів для прямолінійного та...
Система підґрунтового зрошення
Номер патенту: 75361
Опубліковано: 26.11.2012
Автори: Пугач Андрій Миколайович, Кобець Анатолій Степанович
МПК: A01G 25/06
Мітки: підґрунтового, зрошення, система
Формула / Реферат:
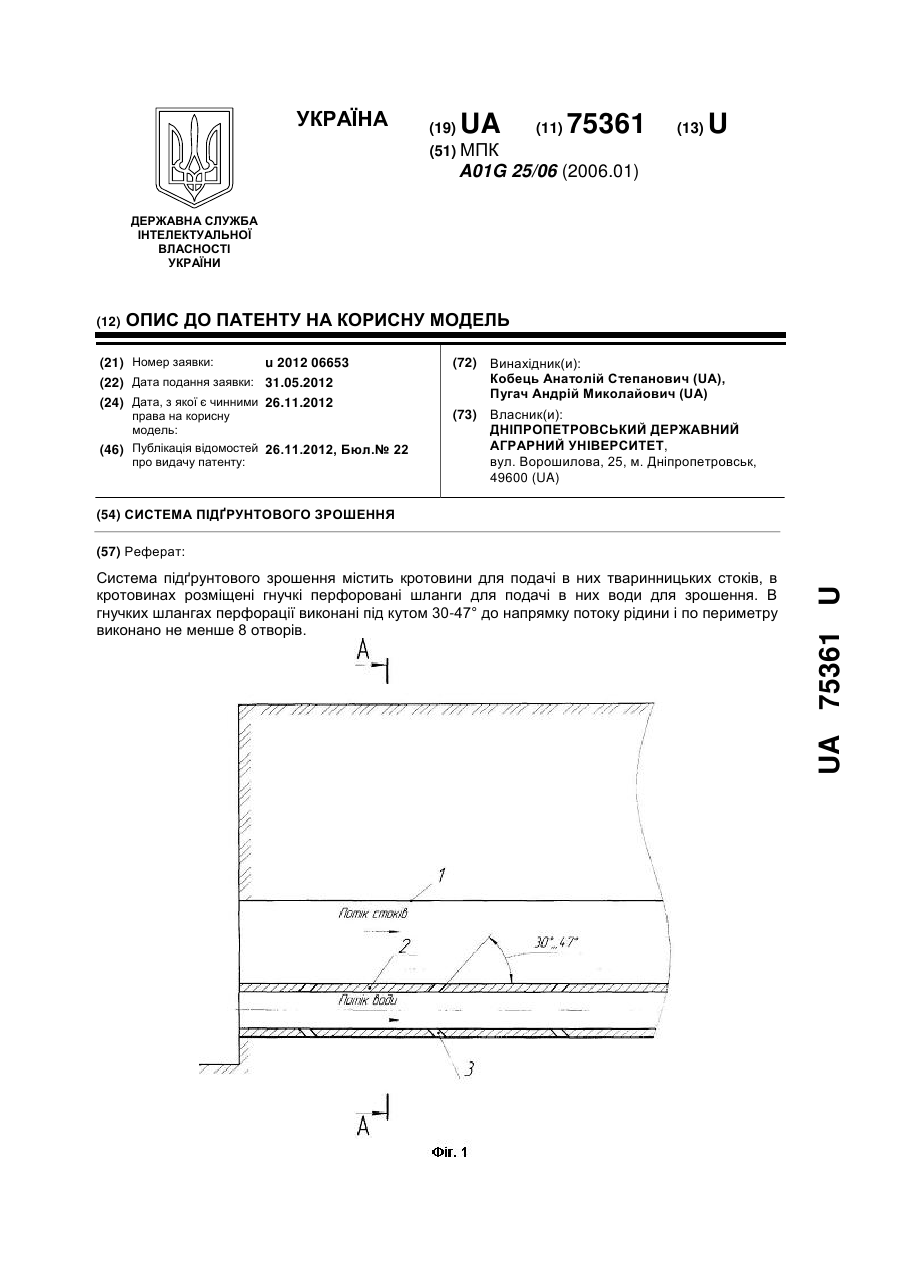
Система підґрунтового зрошення, що містить кротовини для подачі в них тваринницьких стоків, в кротовинах розміщені гнучкі перфоровані шланги для подачі в них води для зрошення, яка відрізняється тим, що в гнучких шлангах перфорації виконані під кутом 30-47° до напрямку потоку рідини і по периметру виконано не менше 8 отворів.
Пристрій для підґрунтового зрошення
Номер патенту: 76113
Опубліковано: 25.12.2012
Автори: Кобець Анатолій Степанович, Пугач Андрій Миколайович
МПК: A01G 25/06
Мітки: пристрій, підґрунтового, зрошення
Формула / Реферат:
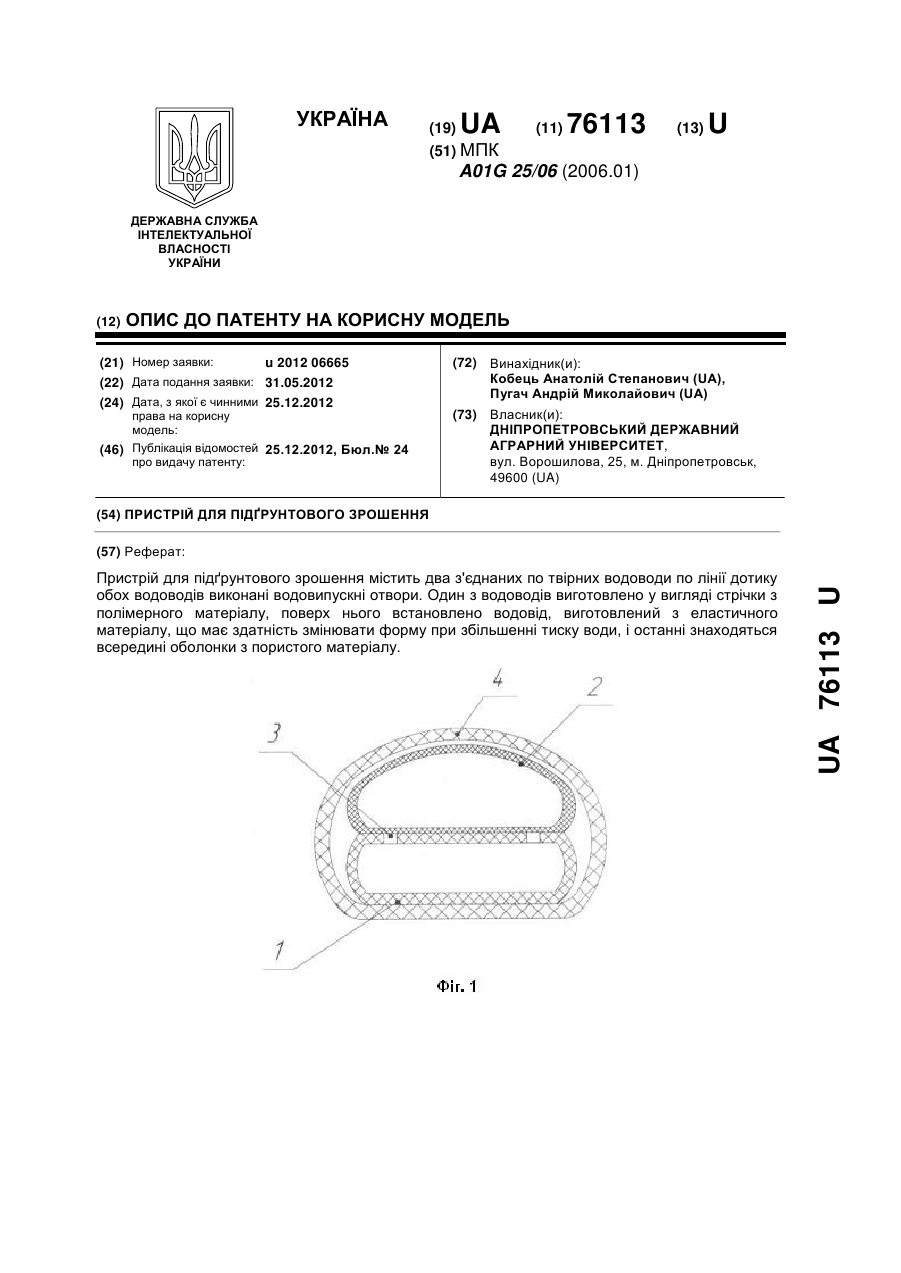
Пристрій для підґрунтового зрошення, що містить два з'єднаних по твірних водоводи, по лінії дотику обох водоводів виконані водовипускні отвори, який відрізняється тим, що один з водоводів виготовлено у вигляді стрічки з полімерного матеріалу, поверх нього встановлено водовід, виготовлений з еластичного матеріалу, що має здатність змінювати форму при збільшенні тиску води, і останні знаходяться всередині оболонки з пористого матеріалу.
Пристрій для локального підґрунтового мікрозрошення плодових культур
Номер патенту: 81463
Опубліковано: 25.06.2013
Автори: Пугач Андрій Миколайович, Бондарчук Наталія Володимирівна
МПК: A01G 25/00
Мітки: підґрунтового, пристрій, мікрозрошення, локального, культур, плодових
Формула / Реферат:
Пристрій для локального підґрунтового мікрозрошення плодових культур, що включає джерело водопостачання, насосну установку, транспортний і зрошувальні трубопроводи з розміщеними в них водовипусками, який відрізняється тим, що водовипуски автоматично перекривають подачу води при розширенні гігроскопічного елемента, який взаємодіє із запірним клапаном.
Пристрій для підґрунтового зрошення
Номер патенту: 76115
Опубліковано: 25.12.2012
Автори: Кобець Анатолій Степанович, Пугач Андрій Миколайович
МПК: A01G 25/06
Мітки: пристрій, зрошення, підґрунтового
Формула / Реферат:
Пристрій для підґрунтового зрошення, що містить корпус з водовипускним отвором, пружний пелюстковий клапан, верхня частина корпусу обладнана розподільчою головкою, що встановлена по периметру водовипускного отвору, а пелюстковий клапан виконаний у вигляді дугоподібних пластин, які сходяться на вершині конічної розподільчої головки і прилягають до її граней, який відрізняється тим, що над пелюстковим клапаном встановлено захисний конус, що...
Попередній патент: Поліпептид, що має активність ферменту фосфатидилінозитол-специфічної фосфоліпази с, нуклеїнова кислота, що його кодує, та спосіб його виробництва і застосування
Наступний патент: Застосування поруватих нетканих полотен у звуковбирних панелях
Випадковий патент: Кришка для дозованого добавляння окремо упакованої рідкої речовини