Пристрій і спосіб визначення відхилення двох тіл від заданого положення
Формула / Реферат
1. Пристрій (8) для виявлення відхилення двох тіл (10, 12) від заданого положення, що включає перший вимірювальний пристрій (14), встановлений на першому тілі (10), другий вимірювальний пристрій (18), встановлений на другому тілі (12), і обчислювальний пристрій (22); при цьому перший вимірювальний пристрій (14) має засіб (24) генерації щонайменше одного світлового пучка (28) і область розсіювання (34) падаючого на неї світла; при цьому другий вимірювальний пристрій (18) має відбивач (38), звернений до першого вимірювальним пристроєм (14), коли вказані вимірювальні пристрої (14, 18) встановлені на відповідних тілах (10, 12), призначений для віддзеркалення світлового пучка (28) на область розсіювання (34), і при цьому другий вимірювальний пристрій (18) має відеокамеру (36) для реєстрації зображень області розсіювання (34); при цьому обчислювальний пристрій (22) виконаний з можливістю визначення щонайменше однієї точки падіння на область розсіювання (34) світлового пучка (28), відбитого відбивачем (38), за відеоданими, отриманими з камери (36), і виявлення по такій точці падіння відхилення положення першого тіла (10) від заданого положення першого тіла (10) і відхилення положення другого тіла (12) від заданого положення другого тіла (12).
2. Пристрій за п. 1, який відрізняється тим, що камера (36) встановлена знімно на відбивачі (38).
3. Пристрій за п. 2, який відрізняється тим, що камера (36) встановлена знімно на відбивачі (38) за допомогою монтажного кронштейна (11), приєднаного до відбивача (38) з боку, оберненого від області розсіювання (34).
4. Пристрій за п. 1, який відрізняється тим, що другий вимірювальний пристрій (18) додатково має смартфон (15), при цьому відеокамера (36) змонтована на смартфоні (15).
5. Пристрій за п. 4, який відрізняється тим, що смартфон (15) встановлений на відбивачі (38) за допомогою монтажного кронштейна (11), приєднаного до відбивача (38) з боку, оберненого від області розсіювання (34).
6. Пристрій за п. 5, який відрізняється тим, що смартфон (15) встановлений знімно за допомогою монтажного кронштейна (11).
7. Пристрій за п. 5, який відрізняється тим, що смартфон (15) встановлений знімно і рухомо відносно опори на монтажному кронштейні (11).
8. Пристрій за будь-яким пунктів 4-7, який відрізняється тим, що смартфон (15) зв'язаний з обчислювальним пристроєм (22).
9. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що першим тілом (10) є перший вал (10), а другим тілом (12) є другий вал (12), при цьому перший вимірювальний пристрій (14) встановлено на круглій поверхні першого вала (10), а другий вимірювальний пристрій (18) встановлено на круглій поверхні другого вала (12), пристрій включає щонайменше один інклінометр (17, 19) для вимірювання кута повороту першого вала (10) і/або другого вала (12) в положенні обертання, пристрій включає обчислювальний пристрій (22), призначений для визначення горизонтального кутового зсуву і/або вертикального кутового зсуву і/або горизонтальної неспіввісності і/або вертикальної неспіввісності першого і другого валів відносно заданого положення першого і другого валів (10, 12), виходячи з кута повороту, виміряного в різних положеннях обертання першого і/або другого вала, і виходячи з точки падіння на область розсіювання (34) світлового пучка, відбитого відбивачем (38) в цих положеннях обертання.
10. Спосіб виявлення відхилення від заданого положення двох тіл (10, 12), де перший вимірювальний пристрій (14) розміщують на першому тілі (10) з двох тіл (10, 12), а другий вимірювальний пристрій (18) розміщують на другому тілі (12) з двох тіл (10, 12); де світловий пучок (28), що генерують першим вимірювальним пристроєм (14), відбивається на область розсіювання (34) на першому вимірювальному пристрої (14) відбивачем (38) на другому вимірювальному пристрої (18); де щонайменше одне зображення області розсіювання (34) реєструють камерою (36), що встановлюють на другий вимірювальний пристрій (18), і де це щонайменше одне зображення аналізують для визначення щонайменше однієї точки падіння (WV, PV) на область розсіювання (34) світлового пучка, відбитого відбивачем, і для виявлення по цій точці відхилення положення першого тіла від заданого положення першого тіла і відхилення положення другого тіла від заданого положення другого тіла.
Текст
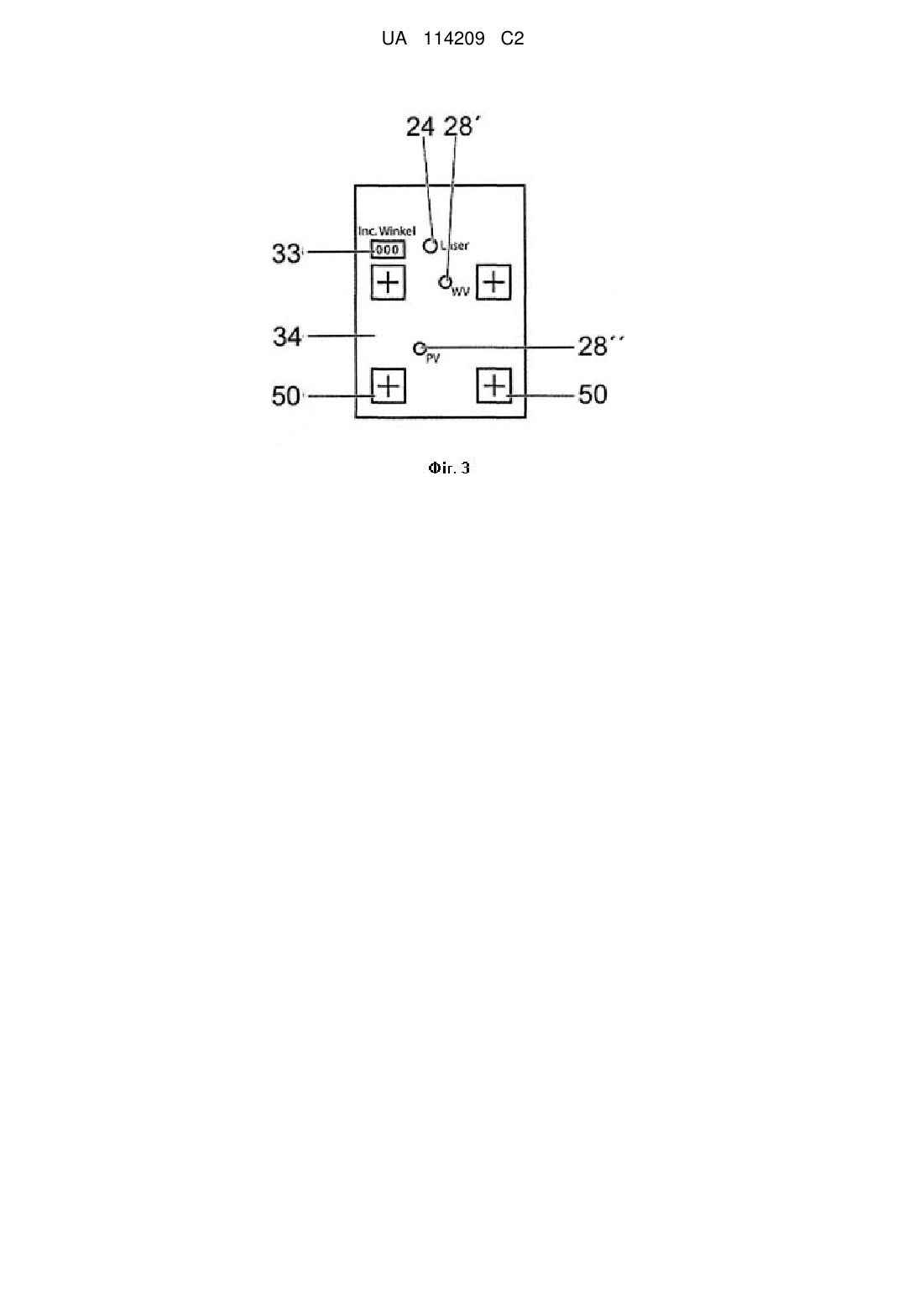
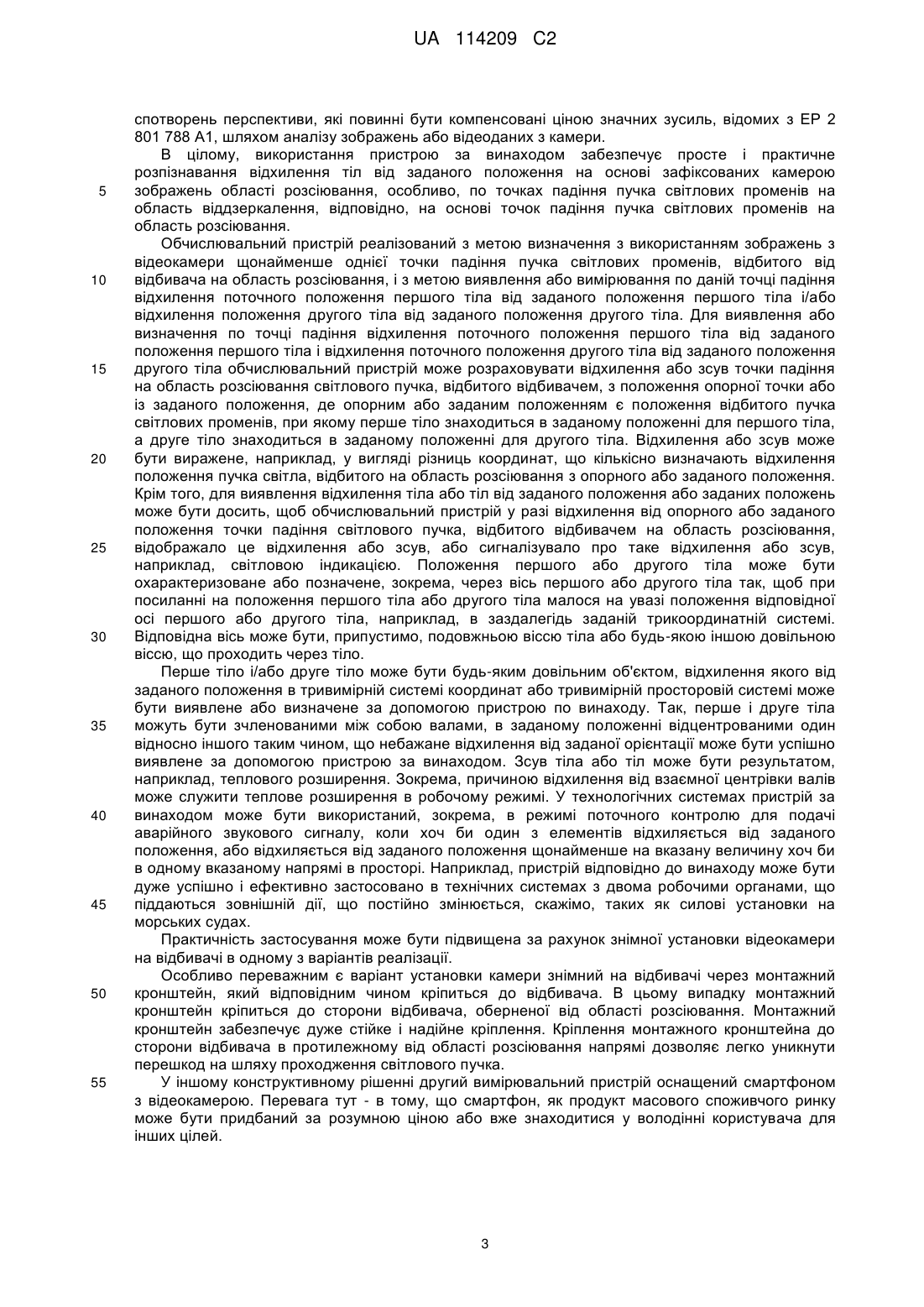
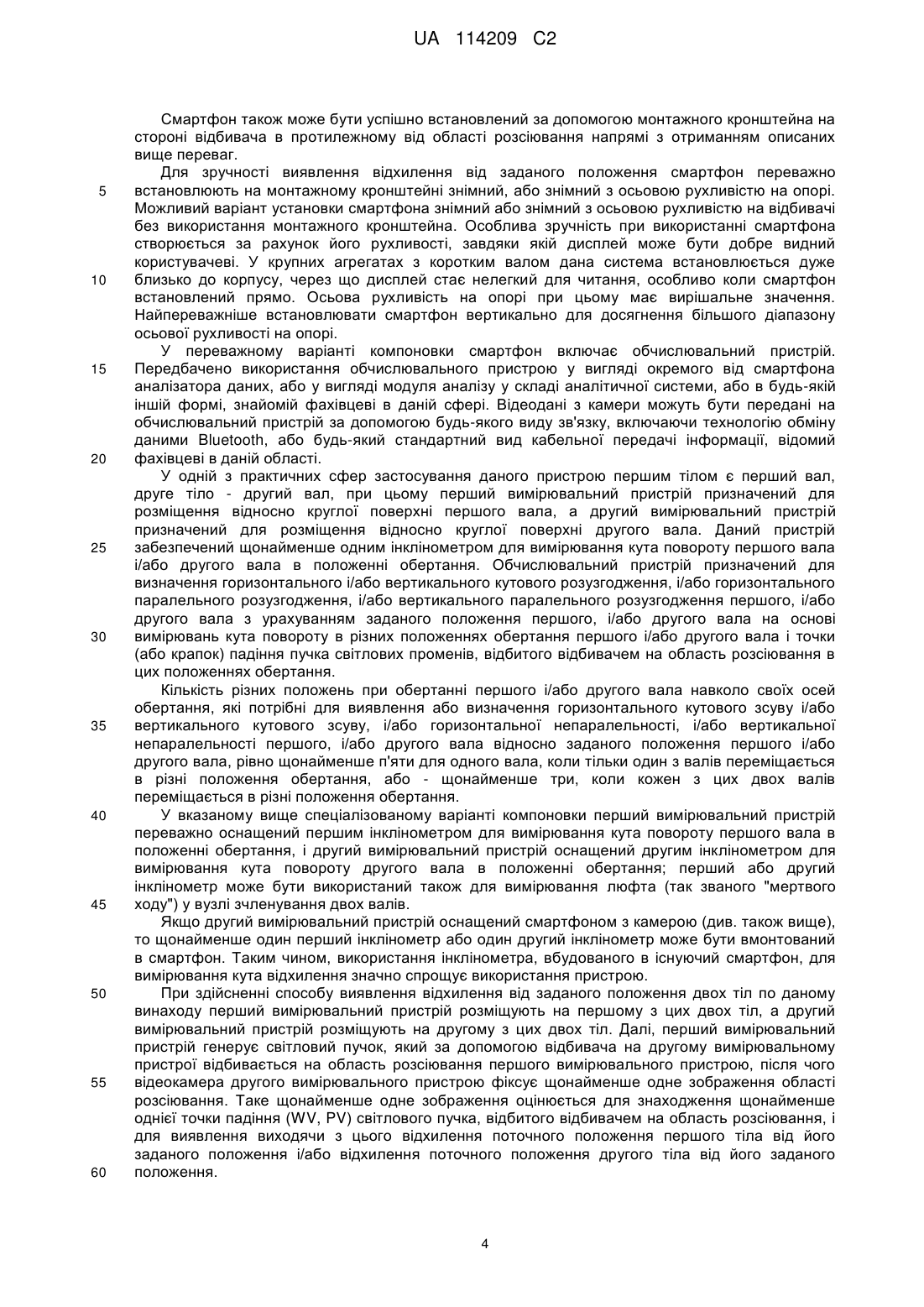
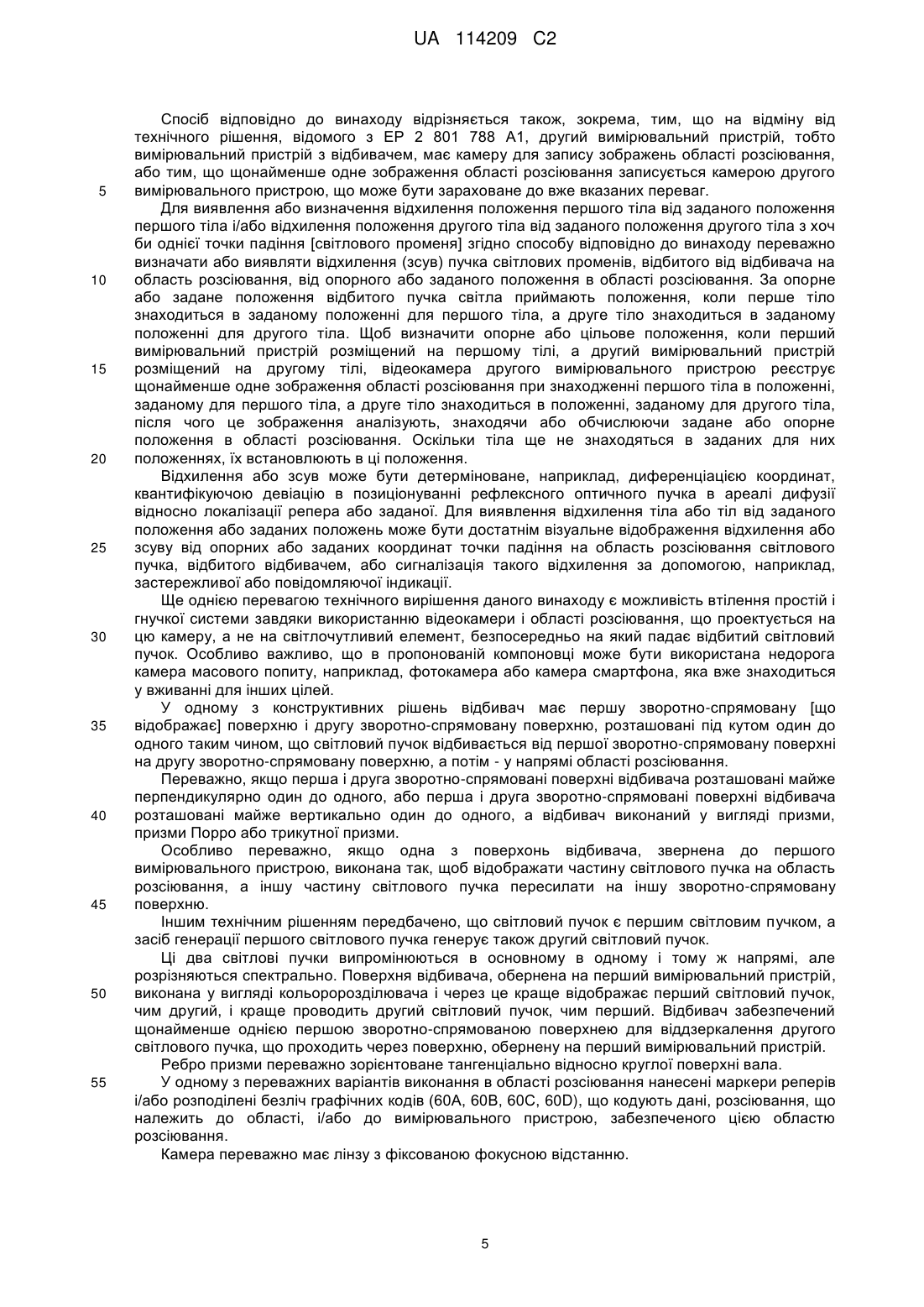
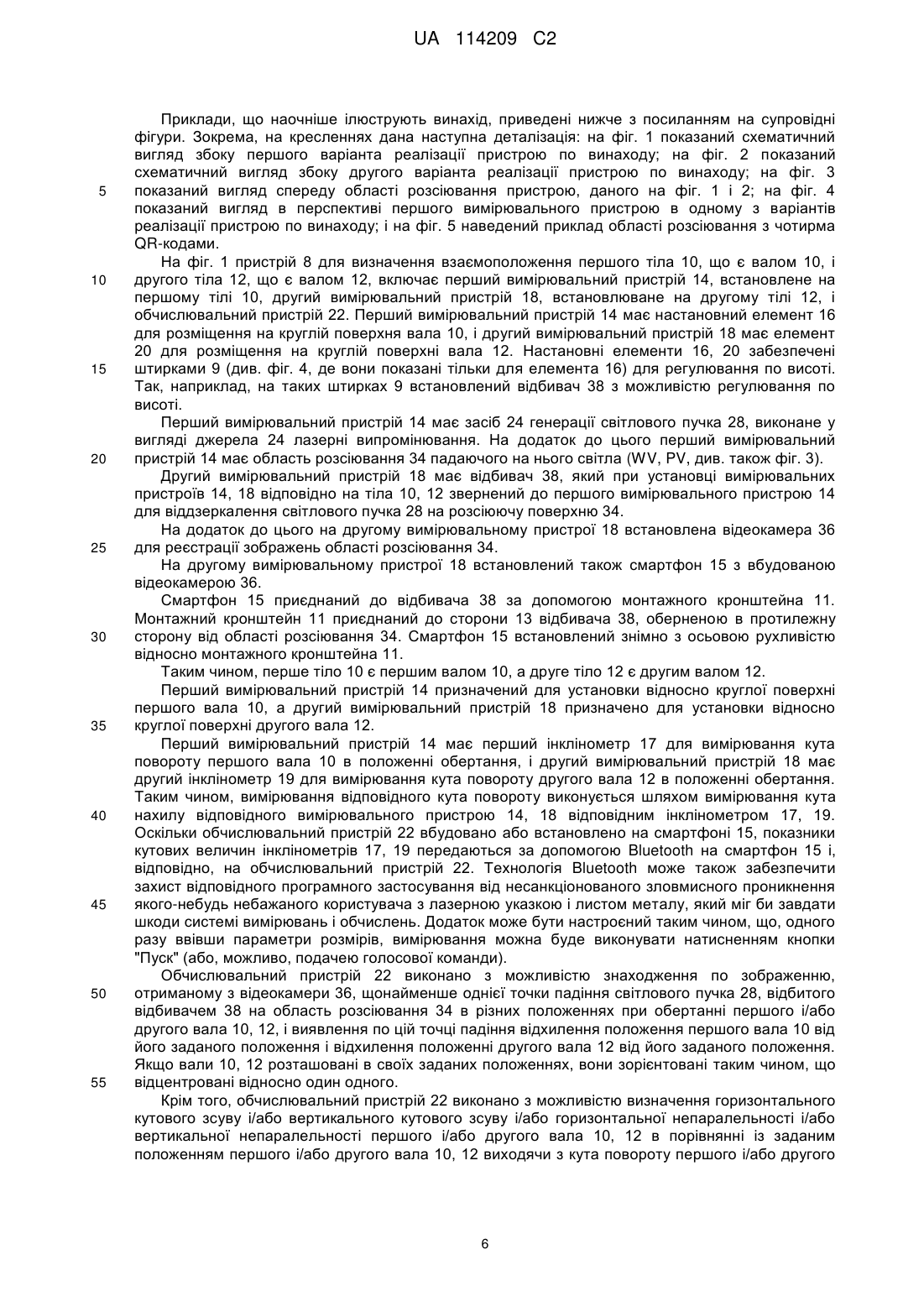
Реферат: Винахід стосується пристрою (8) для виявлення відхилення від заданого положення двох тіл (10, 12), що включає перший вимірювальний пристрій (14), що розміщено відносно першого тіла (10), другий вимірювальний пристрій (18), що розміщено відносно другого тіла (12), і обчислювальний пристрій (22). Перший вимірювальний пристрій (14) включає засіб (24) генерації щонайменше одного світлового пучка (28) і область розсіювання (34) світла, падаючого на область розсіювання, другий вимірювальний пристрій (18) включає відбивач (38) світлового пучка (28) на область розсіювання (34). Другий вимірювальний пристрій (18) включає камеру (36), реєструючу зображення області розсіювання (34). Обчислювальний пристрій (22) виконаний з можливістю виявлення по таких зображеннях відхилення від заданого положення тіл (10, 12). Винахід стосується також способу виявлення відхилення від заданого положення. UA 114209 C2 (12) UA 114209 C2 UA 114209 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід стосується пристрою і способу виявлення відхилення заданого положення двох тіл, що включає перший вимірювальний пристрій, що встановлюється на першому тілі, другий вимірювальний пристрій, що встановлюється на другому тілі, і обчислювальний пристрій. Крім того, подібний пристрій може мати альтернативне або додаткове застосування для визначення орієнтації двох тіл, зокрема валів, відносно один одного. Зазвичай в системах вказаного типу щонайменше один з таких двох вимірювальних пристроїв має джерело світла, що генерує світловий промінь, точка падіння якого доводиться на один або чутливих елементів на іншому вимірювальному пристрої, або - на чутливий елемент на самому вимірювальному пристрої, що несе джерело світла, при цьому другий вимірювальний пристрій служить для віддзеркалення цього променя світла. Як правило, взаємну орієнтацію тіл, наприклад, валів, визначають по положенню точки падіння світлового променя в різних кутових положеннях при обертанні. Для цього вимірювальні пристрої переміщають уздовж круглої поверхні валів, або встановлюють на круглій поверхні валів, що обертаються. У документах DE 33 20 163 А1 і DE 39 11 307 А1 описані пристрої контролю положення вала, в яких перший вимірювальний пристрій випускає пучок світла, яке відбивається дзеркальною призмою другого вимірювального пристрою назад на оптичний датчик на першому вимірювальному пристрої. У документі DE 33 35 336 А1 описане пристрій контролю положення вала, де кожне - перший і другий - вимірювальний пристрій випромінює пучок світла і має оптичний датчик, при цьому кожен пучок світла проектується на датчик на іншому вимірювальному пристрої. Пристрій контролю положення вала, що працює за цим принципом, описаний також в патенті US 6,873,931 В1, де кожен з двох вимірювальних пристроїв оснащений парою датчиків прискорення по двох осях для автоматичного визначення кута обертання вала. Пристрій контролю положення вала відомий з DE 38 14 466 А1, де перший вимірювальний пристрій випускає світловий пучок, який падає на два оптичні приймачі, встановлених один за іншим уздовж осі другого вимірювального пристрою. Пристрій контролю положення вала відомий з WO 03/067187, де перший вимірювальний пристрій випромінює віялоподібний пучок, який падає на два оптичні датчики, розташованих один за іншим уздовж осі на другому вимірювальному пристрої. Пристрій контролю положення вала відомий з WO 00/28275 А1, де два вимірювальні пристрої прикріплено поодинці з кожного кінця двох валів, при цьому перший вимірювальний пристрій генерує віялоподібний світловий пучок, який латерально падає на три маркерних штирки, розміщених в площині другого вимірювального пристрою. ЕР 0 962 746 А2 описує пристрій контролю положення вала, у складі якого перший пристрій має джерело пучка світла одного кольору, розщіплювач пучка і кольорочуттєвий ПЗС-детектор, а другий пристрій має джерело пучка світла іншого кольору і кольоророзділювач (дихроїчний кольоророзщіплювач), який відображає перший колір і пропускає другий; джерело світла другого пристрою розташоване, дивлячись з боку першого пристрою - позаду кольоророзділювача, а джерело світла першого пристрою розташоване, дивлячись з боку другого пристрою - позаду світлодільника. Пучок світла, згенеруваний першим пристроєм, спочатку проходить крізь світлодільник першого пристрою, а потім відбивається кольоророзділювачем другого пристрою. Цей відбитий пучок, у свою чергу, відбивається світлодільником першого пристрою і потрапляє на чутливий елемент. Пучок світла другого пристрою спочатку проходить через кольоророзділювач другого пристрою, а потім відбивається світлодільником першого пристрою у бік чутливого елемента. У документі ЕР 2 093 537 А1 описаний пристрій контролю положення вала, у складі якого перший вимірювальний пристрій випромінює віяловий пучок світла, яке падає на два смугових оптичні детектори другого вимірювального пристрою, розміщених латерально паралельно на відстані один від одного, при цьому довготний напрям детекторів перпендикулярний площині віялового пучка світла. У всіх згаданих вище пристроях контролю положення вала точку падіння світлового пучка на поверхню датчика точно визначають обчисленням. З DE 40 41 723 А1 відомий пристрій для визначення положення точки вимірювання відносно опорної точки для управління або контролю при бурінні свердловин, що включає декілька вимірювальних станцій, розміщених в свердловині або на бурильній головці, на кожній з яких встановлена камера з маркувальною відміткою, де кожна камера записує маркувальну відмітку сусідньої камери або вимірювальної станції. З патенту WO 2010/042039 А1 відомий пристрій контролю центрівки валів, в якому кожен з двох вимірювальних пристроїв оснащений камерою, поміщеною в корпус, при цьому сторона 1 UA 114209 C2 5 10 15 20 25 30 35 40 45 50 55 60 корпусу, звернена до іншого пристрою, забезпечена оптичним малюнком, що фіксується протилежною камерою. Сторона корпусу з нанесеним малюнком в кожному випадку забезпечена отвором, крізь який проектується протилежний малюнок. Можливий варіант конструктивного рішення, при якому один з цих двох пристроїв обладнаний тільки камерою, без малюнка, тоді як інший пристрій не має камери, але забезпечено тривимірним малюнком. ЕР 1 211 480 А2 розкриває пристрій контролю центрівки валів, в якому перший вимірювальний пристрій забезпечений джерелом світла, яке направляє світловий пучок на другий вимірювальний пристрій, оснащений матовим екраном; на сторону матового екрана, обернену в протилежну від першого вимірювального пристрою сторону, нанесений спеціальний оптичний малюнок на реєстраторові зображення, який одночасно є елементом другого вимірювального пристрою. У DE 101 43 812 А1 і DE 101 17 390 А1 описаний пристрій контролю центрівки валів, в якому перший вимірювальний пристрій має джерело світла, випромінююче віялоподібний пучок, а розташований напроти нього другий вимірювальний пристрій має оптичну систему з оберненим назад (що відображає) матовим екраном, що частково відображає, і камеру, реєструючу сторону матового екрана, обернену в протилежну сторону від першого вимірювального пристрою, при цьому первинна світлова пляма пучка падає безпосередньо від джерела світла, а вторинна світлова пляма пучка відбивається від оптичної системи другого вимірювального пристрою і відбивача, що частково відображає, на передній стороні першого вимірювального пристрою. Від компанії Wente CamSorik GMBH, 38108 Брауншвейг, Німеччина доступний лазерний приймач з камерою для машинного вимірювання під фірмовим найменуванням LaserTrac. З ЕР 2 801 788 А1 відоме пристрій для визначення положення двох механічних елементів або тіл відносно один одного, у складі якого перший вимірювальний пристрій для установки на першому механічному елементі або першому тілі з двох механічних елементів або тіл має засіб генерації щонайменше одного пучка світлових променів, зону розсіювання світла, що подає на неї, і камеру для реєстрації зображень зони розсіювання. Даний відомий пристрій додатковий або окремо може застосовуватися для виявлення або визначення відхилення тіл від заданого положення. У цьому відомому рішенні камера закріплена збоку під кутом до зони розсіювання, при цьому оптична вісь камери, відповідно, орієнтована не перпендикулярно до зони розсіювання. Другий вимірювальний пристрій, що розміщується на другому механічному елементі або на другому тілі, має відбивач, звернений до першого вимірювального пристрою, притому що вимірювальні пристрої закріплені на даних механічних елементах або тілах для віддзеркалення пучка світлових променів на зону розсіювання. Це відоме конструктивне рішення доповнене процесором, що забезпечує знаходження точки падіння пучка світлових променів, відбитих від відбивача на зону розсіювання, з використанням відеоданих з камери і виходячи з цього - визначення положення першого тіла і другого тіла відносно один одного, або - додатково або окремо - виявлення або обчислення відхилення тіл від їх відповідних заданих положень. Для визначення координат центра точок падіння необхідно, щоб спотворення перспективи оптичноїсистеми, викликані відхиленням орієнтації камери від перпендикуляра відносно зони розсіювання, були скоректовані за допомогою складного процесу, що включає аналіз зображень, зафіксованих камерою. задачею даного винаходу є пристрій і спосіб простого і зручного виявлення або визначення відхилення двох тіл від заданого взаємного положення на основі зафіксованих відеокамерою зображень точок падіння пучка світлових променів на область віддзеркалення. Поставлена задача вирішується за рахунок застосування пристрою з ознаками по пункту 1 способом по пункту 10 формули винаходу. Відповідно до винаходу, пристрій для виявлення або визначення відхилення двох тіл від заданого взаємоположення відрізняється, зокрема, тим, що другий вимірювальний пристрій, тобто вимірювальний пристрій, що має відбивач, оснащений відеокамерою для реєстрації зображень області розсіювання. На відміну від технічного рішення, відомого з ЕР 2 801 788 А1, камера, реєструюча зображення області розсіювання, в конструктивного виконання по даному винаходу встановлена не на першому вимірювальному пристрої, тобто - не на вимірювальному пристрої, що несе засіб генерації щонайменше одного пучка світлових променів і що має ділянку розсіювання світла, падаючого на розсіюючу поверхню. Перевага тут полягає в тому, що оптична вісь камери при розташуванні вимірювальних пристроїв на об'єктах може бути зорієнтована перпендикулярно або майже перпендикулярно до області розсіювання. Це неможливо у варіанті рішення, відомого з ЕР 2 801 788 А1, оскільки це блокувало б шлях проходження пучка променів світла. Перевага перпендикулярної або близької до перпендикулярної орієнтації оптичної осі камери до області розсіювання полягає у відсутності 2 UA 114209 C2 5 10 15 20 25 30 35 40 45 50 55 спотворень перспективи, які повинні бути компенсовані ціною значних зусиль, відомих з ЕР 2 801 788 А1, шляхом аналізу зображень або відеоданих з камери. В цілому, використання пристрою за винаходом забезпечує просте і практичне розпізнавання відхилення тіл від заданого положення на основі зафіксованих камерою зображень області розсіювання, особливо, по точках падіння пучка світлових променів на область віддзеркалення, відповідно, на основі точок падіння пучка світлових променів на область розсіювання. Обчислювальний пристрій реалізований з метою визначення з використанням зображень з відеокамери щонайменше однієї точки падіння пучка світлових променів, відбитого від відбивача на область розсіювання, і з метою виявлення або вимірювання по даній точці падіння відхилення поточного положення першого тіла від заданого положення першого тіла і/або відхилення положення другого тіла від заданого положення другого тіла. Для виявлення або визначення по точці падіння відхилення поточного положення першого тіла від заданого положення першого тіла і відхилення поточного положення другого тіла від заданого положення другого тіла обчислювальний пристрій може розраховувати відхилення або зсув точки падіння на область розсіювання світлового пучка, відбитого відбивачем, з положення опорної точки або із заданого положення, де опорним або заданим положенням є положення відбитого пучка світлових променів, при якому перше тіло знаходиться в заданому положенні для першого тіла, а друге тіло знаходиться в заданому положенні для другого тіла. Відхилення або зсув може бути виражене, наприклад, у вигляді різниць координат, що кількісно визначають відхилення положення пучка світла, відбитого на область розсіювання з опорного або заданого положення. Крім того, для виявлення відхилення тіла або тіл від заданого положення або заданих положень може бути досить, щоб обчислювальний пристрій у разі відхилення від опорного або заданого положення точки падіння світлового пучка, відбитого відбивачем на область розсіювання, відображало це відхилення або зсув, або сигналізувало про таке відхилення або зсув, наприклад, світловою індикацією. Положення першого або другого тіла може бути охарактеризоване або позначене, зокрема, через вісь першого або другого тіла так, щоб при посиланні на положення першого тіла або другого тіла малося на увазі положення відповідної осі першого або другого тіла, наприклад, в заздалегідь заданій трикоординатній системі. Відповідна вісь може бути, припустимо, подовжньою віссю тіла або будь-якою іншою довільною віссю, що проходить через тіло. Перше тіло і/або друге тіло може бути будь-яким довільним об'єктом, відхилення якого від заданого положення в тривимірній системі координат або тривимірній просторовій системі може бути виявлене або визначене за допомогою пристрою по винаходу. Так, перше і друге тіла можуть бути зчленованими між собою валами, в заданому положенні відцентрованими один відносно іншого таким чином, що небажане відхилення від заданої орієнтації може бути успішно виявлене за допомогою пристрою за винаходом. Зсув тіла або тіл може бути результатом, наприклад, теплового розширення. Зокрема, причиною відхилення від взаємної центрівки валів може служити теплове розширення в робочому режимі. У технологічних системах пристрій за винаходом може бути використаний, зокрема, в режимі поточного контролю для подачі аварійного звукового сигналу, коли хоч би один з елементів відхиляється від заданого положення, або відхиляється від заданого положення щонайменше на вказану величину хоч би в одному вказаному напрямі в просторі. Наприклад, пристрій відповідно до винаходу може бути дуже успішно і ефективно застосовано в технічних системах з двома робочими органами, що піддаються зовнішній дії, що постійно змінюється, скажімо, таких як силові установки на морських судах. Практичність застосування може бути підвищена за рахунок знімної установки відеокамери на відбивачі в одному з варіантів реалізації. Особливо переважним є варіант установки камери знімний на відбивачі через монтажний кронштейн, який відповідним чином кріпиться до відбивача. В цьому випадку монтажний кронштейн кріпиться до сторони відбивача, оберненої від області розсіювання. Монтажний кронштейн забезпечує дуже стійке і надійне кріплення. Кріплення монтажного кронштейна до сторони відбивача в протилежному від області розсіювання напрямі дозволяє легко уникнути перешкод на шляху проходження світлового пучка. У іншому конструктивному рішенні другий вимірювальний пристрій оснащений смартфоном з відеокамерою. Перевага тут - в тому, що смартфон, як продукт масового споживчого ринку може бути придбаний за розумною ціною або вже знаходитися у володінні користувача для інших цілей. 3 UA 114209 C2 5 10 15 20 25 30 35 40 45 50 55 60 Смартфон також може бути успішно встановлений за допомогою монтажного кронштейна на стороні відбивача в протилежному від області розсіювання напрямі з отриманням описаних вище переваг. Для зручності виявлення відхилення від заданого положення смартфон переважно встановлюють на монтажному кронштейні знімний, або знімний з осьовою рухливістю на опорі. Можливий варіант установки смартфона знімний або знімний з осьовою рухливістю на відбивачі без використання монтажного кронштейна. Особлива зручність при використанні смартфона створюється за рахунок його рухливості, завдяки якій дисплей може бути добре видний користувачеві. У крупних агрегатах з коротким валом дана система встановлюється дуже близько до корпусу, через що дисплей стає нелегкий для читання, особливо коли смартфон встановлений прямо. Осьова рухливість на опорі при цьому має вирішальне значення. Найпереважніше встановлювати смартфон вертикально для досягнення більшого діапазону осьової рухливості на опорі. У переважному варіанті компоновки смартфон включає обчислювальний пристрій. Передбачено використання обчислювального пристрою у вигляді окремого від смартфона аналізатора даних, або у вигляді модуля аналізу у складі аналітичної системи, або в будь-якій іншій формі, знайомій фахівцеві в даній сфері. Відеодані з камери можуть бути передані на обчислювальний пристрій за допомогою будь-якого виду зв'язку, включаючи технологію обміну даними Bluetooth, або будь-який стандартний вид кабельної передачі інформації, відомий фахівцеві в даній області. У одній з практичних сфер застосування даного пристрою першим тілом є перший вал, друге тіло - другий вал, при цьому перший вимірювальний пристрій призначений для розміщення відносно круглої поверхні першого вала, а другий вимірювальний пристрій призначений для розміщення відносно круглої поверхні другого вала. Даний пристрій забезпечений щонайменше одним інклінометром для вимірювання кута повороту першого вала і/або другого вала в положенні обертання. Обчислювальний пристрій призначений для визначення горизонтального і/або вертикального кутового розузгодження, і/або горизонтального паралельного розузгодження, і/або вертикального паралельного розузгодження першого, і/або другого вала з урахуванням заданого положення першого, і/або другого вала на основі вимірювань кута повороту в різних положеннях обертання першого і/або другого вала і точки (або крапок) падіння пучка світлових променів, відбитого відбивачем на область розсіювання в цих положеннях обертання. Кількість різних положень при обертанні першого і/або другого вала навколо своїх осей обертання, які потрібні для виявлення або визначення горизонтального кутового зсуву і/або вертикального кутового зсуву, і/або горизонтальної непаралельності, і/або вертикальної непаралельності першого, і/або другого вала відносно заданого положення першого і/або другого вала, рівно щонайменше п'яти для одного вала, коли тільки один з валів переміщається в різні положення обертання, або - щонайменше три, коли кожен з цих двох валів переміщається в різні положення обертання. У вказаному вище спеціалізованому варіанті компоновки перший вимірювальний пристрій переважно оснащений першим інклінометром для вимірювання кута повороту першого вала в положенні обертання, і другий вимірювальний пристрій оснащений другим інклінометром для вимірювання кута повороту другого вала в положенні обертання; перший або другий інклінометр може бути використаний також для вимірювання люфта (так званого "мертвого ходу") у вузлі зчленування двох валів. Якщо другий вимірювальний пристрій оснащений смартфоном з камерою (див. також вище), то щонайменше один перший інклінометр або один другий інклінометр може бути вмонтований в смартфон. Таким чином, використання інклінометра, вбудованого в існуючий смартфон, для вимірювання кута відхилення значно спрощує використання пристрою. При здійсненні способу виявлення відхилення від заданого положення двох тіл по даному винаходу перший вимірювальний пристрій розміщують на першому з цих двох тіл, а другий вимірювальний пристрій розміщують на другому з цих двох тіл. Далі, перший вимірювальний пристрій генерує світловий пучок, який за допомогою відбивача на другому вимірювальному пристрої відбивається на область розсіювання першого вимірювального пристрою, після чого відеокамера другого вимірювального пристрою фіксує щонайменше одне зображення області розсіювання. Таке щонайменше одне зображення оцінюється для знаходження щонайменше однієї точки падіння (WV, PV) світлового пучка, відбитого відбивачем на область розсіювання, і для виявлення виходячи з цього відхилення поточного положення першого тіла від його заданого положення і/або відхилення поточного положення другого тіла від його заданого положення. 4 UA 114209 C2 5 10 15 20 25 30 35 40 45 50 55 Спосіб відповідно до винаходу відрізняється також, зокрема, тим, що на відміну від технічного рішення, відомого з ЕР 2 801 788 А1, другий вимірювальний пристрій, тобто вимірювальний пристрій з відбивачем, має камеру для запису зображень області розсіювання, або тим, що щонайменше одне зображення області розсіювання записується камерою другого вимірювального пристрою, що може бути зараховане до вже вказаних переваг. Для виявлення або визначення відхилення положення першого тіла від заданого положення першого тіла і/або відхилення положення другого тіла від заданого положення другого тіла з хоч би однієї точки падіння [світлового променя] згідно способу відповідно до винаходу переважно визначати або виявляти відхилення (зсув) пучка світлових променів, відбитого від відбивача на область розсіювання, від опорного або заданого положення в області розсіювання. За опорне або задане положення відбитого пучка світла приймають положення, коли перше тіло знаходиться в заданому положенні для першого тіла, а друге тіло знаходиться в заданому положенні для другого тіла. Щоб визначити опорне або цільове положення, коли перший вимірювальний пристрій розміщений на першому тілі, а другий вимірювальний пристрій розміщений на другому тілі, відеокамера другого вимірювального пристрою реєструє щонайменше одне зображення області розсіювання при знаходженні першого тіла в положенні, заданому для першого тіла, а друге тіло знаходиться в положенні, заданому для другого тіла, після чого це зображення аналізують, знаходячи або обчислюючи задане або опорне положення в області розсіювання. Оскільки тіла ще не знаходяться в заданих для них положеннях, їх встановлюють в ці положення. Відхилення або зсув може бути детерміноване, наприклад, диференціацією координат, квантифікуючою девіацію в позиціонуванні рефлексного оптичного пучка в ареалі дифузії відносно локалізації репера або заданої. Для виявлення відхилення тіла або тіл від заданого положення або заданих положень може бути достатнім візуальне відображення відхилення або зсуву від опорних або заданих координат точки падіння на область розсіювання світлового пучка, відбитого відбивачем, або сигналізація такого відхилення за допомогою, наприклад, застережливої або повідомляючої індикації. Ще однією перевагою технічного вирішення даного винаходу є можливість втілення простій і гнучкої системи завдяки використанню відеокамери і області розсіювання, що проектується на цю камеру, а не на світлочутливий елемент, безпосередньо на який падає відбитий світловий пучок. Особливо важливо, що в пропонованій компоновці може бути використана недорога камера масового попиту, наприклад, фотокамера або камера смартфона, яка вже знаходиться у вживанні для інших цілей. У одному з конструктивних рішень відбивач має першу зворотно-спрямовану [що відображає] поверхню і другу зворотно-спрямовану поверхню, розташовані під кутом один до одного таким чином, що світловий пучок відбивається від першої зворотно-спрямовану поверхні на другу зворотно-спрямовану поверхню, а потім - у напрямі області розсіювання. Переважно, якщо перша і друга зворотно-спрямовані поверхні відбивача розташовані майже перпендикулярно один до одного, або перша і друга зворотно-спрямовані поверхні відбивача розташовані майже вертикально один до одного, а відбивач виконаний у вигляді призми, призми Порро або трикутної призми. Особливо переважно, якщо одна з поверхонь відбивача, звернена до першого вимірювального пристрою, виконана так, щоб відображати частину світлового пучка на область розсіювання, а іншу частину світлового пучка пересилати на іншу зворотно-спрямовану поверхню. Іншим технічним рішенням передбачено, що світловий пучок є першим світловим пучком, а засіб генерації першого світлового пучка генерує також другий світловий пучок. Ці два світлові пучки випромінюються в основному в одному і тому ж напрямі, але розрізняються спектрально. Поверхня відбивача, обернена на перший вимірювальний пристрій, виконана у вигляді кольоророзділювача і через це краще відображає перший світловий пучок, чим другий, і краще проводить другий світловий пучок, чим перший. Відбивач забезпечений щонайменше однією першою зворотно-спрямованою поверхнею для віддзеркалення другого світлового пучка, що проходить через поверхню, обернену на перший вимірювальний пристрій. Ребро призми переважно зорієнтоване тангенціально відносно круглої поверхні вала. У одному з переважних варіантів виконання в області розсіювання нанесені маркери реперів і/або розподілені безліч графічних кодів (60А, 60В, 60С, 60D), що кодують дані, розсіювання, що належить до області, і/або до вимірювального пристрою, забезпеченого цією областю розсіювання. Камера переважно має лінзу з фіксованою фокусною відстанню. 5 UA 114209 C2 5 10 15 20 25 30 35 40 45 50 55 Приклади, що наочніше ілюструють винахід, приведені нижче з посиланням на супровідні фігури. Зокрема, на кресленнях дана наступна деталізація: на фіг. 1 показаний схематичний вигляд збоку першого варіанта реалізації пристрою по винаходу; на фіг. 2 показаний схематичний вигляд збоку другого варіанта реалізації пристрою по винаходу; на фіг. 3 показаний вигляд спереду області розсіювання пристрою, даного на фіг. 1 і 2; на фіг. 4 показаний вигляд в перспективі першого вимірювального пристрою в одному з варіантів реалізації пристрою по винаходу; і на фіг. 5 наведений приклад області розсіювання з чотирма QR-кодами. На фіг. 1 пристрій 8 для визначення взаємоположення першого тіла 10, що є валом 10, і другого тіла 12, що є валом 12, включає перший вимірювальний пристрій 14, встановлене на першому тілі 10, другий вимірювальний пристрій 18, встановлюване на другому тілі 12, і обчислювальний пристрій 22. Перший вимірювальний пристрій 14 має настановний елемент 16 для розміщення на круглій поверхня вала 10, і другий вимірювальний пристрій 18 має елемент 20 для розміщення на круглій поверхні вала 12. Настановні елементи 16, 20 забезпечені штирками 9 (див. фіг. 4, де вони показані тільки для елемента 16) для регулювання по висоті. Так, наприклад, на таких штирках 9 встановлений відбивач 38 з можливістю регулювання по висоті. Перший вимірювальний пристрій 14 має засіб 24 генерації світлового пучка 28, виконане у вигляді джерела 24 лазерні випромінювання. На додаток до цього перший вимірювальний пристрій 14 має область розсіювання 34 падаючого на нього світла (WV, PV, див. також фіг. 3). Другий вимірювальний пристрій 18 має відбивач 38, який при установці вимірювальних пристроїв 14, 18 відповідно на тіла 10, 12 звернений до першого вимірювального пристрою 14 для віддзеркалення світлового пучка 28 на розсіюючу поверхню 34. На додаток до цього на другому вимірювальному пристрої 18 встановлена відеокамера 36 для реєстрації зображень області розсіювання 34. На другому вимірювальному пристрої 18 встановлений також смартфон 15 з вбудованою відеокамерою 36. Смартфон 15 приєднаний до відбивача 38 за допомогою монтажного кронштейна 11. Монтажний кронштейн 11 приєднаний до сторони 13 відбивача 38, оберненою в протилежну сторону від області розсіювання 34. Смартфон 15 встановлений знімно з осьовою рухливістю відносно монтажного кронштейна 11. Таким чином, перше тіло 10 є першим валом 10, а друге тіло 12 є другим валом 12. Перший вимірювальний пристрій 14 призначений для установки відносно круглої поверхні першого вала 10, а другий вимірювальний пристрій 18 призначено для установки відносно круглої поверхні другого вала 12. Перший вимірювальний пристрій 14 має перший інклінометр 17 для вимірювання кута повороту першого вала 10 в положенні обертання, і другий вимірювальний пристрій 18 має другий інклінометр 19 для вимірювання кута повороту другого вала 12 в положенні обертання. Таким чином, вимірювання відповідного кута повороту виконується шляхом вимірювання кута нахилу відповідного вимірювального пристрою 14, 18 відповідним інклінометром 17, 19. Оскільки обчислювальний пристрій 22 вбудовано або встановлено на смартфоні 15, показники кутових величин інклінометрів 17, 19 передаються за допомогою Bluetooth на смартфон 15 і, відповідно, на обчислювальний пристрій 22. Технологія Bluetooth може також забезпечити захист відповідного програмного застосування від несанкціонованого зловмисного проникнення якого-небудь небажаного користувача з лазерною указкою і листом металу, який міг би завдати шкоди системі вимірювань і обчислень. Додаток може бути настроєний таким чином, що, одного разу ввівши параметри розмірів, вимірювання можна буде виконувати натисненням кнопки "Пуск" (або, можливо, подачею голосової команди). Обчислювальний пристрій 22 виконано з можливістю знаходження по зображенню, отриманому з відеокамери 36, щонайменше однієї точки падіння світлового пучка 28, відбитого відбивачем 38 на область розсіювання 34 в різних положеннях при обертанні першого і/або другого вала 10, 12, і виявлення по цій точці падіння відхилення положення першого вала 10 від його заданого положення і відхилення положенні другого вала 12 від його заданого положення. Якщо вали 10, 12 розташовані в своїх заданих положеннях, вони зорієнтовані таким чином, що відцентровані відносно один одного. Крім того, обчислювальний пристрій 22 виконано з можливістю визначення горизонтального кутового зсуву і/або вертикального кутового зсуву і/або горизонтальної непаралельності і/або вертикальної непаралельності першого і/або другого вала 10, 12 в порівнянні із заданим положенням першого і/або другого вала 10, 12 виходячи з кута повороту першого і/або другого 6 UA 114209 C2 5 10 15 20 25 30 35 40 45 50 55 60 вала, зміряного в різних положеннях обертання, і виходячи з точки (крапок) падіння світлового пучка, відбитого відбивачем 38 на область розсіювання в цих положеннях обертання. Джерело світла 24 встановлений з можливістю обертання в напрямах вгору і вниз (не показано). У ілюстративному прикладі здійснення способу (див. фіг. 1) для визначення відхилень від заданого взаємного положення двох валів 10, 12 перший вимірювальний пристрій 14 розміщують на першому валу 10 і другий вимірювальний пристрій 18 розміщують на другому валу 12. Далі, світловий пучок 28, що генерується першим вимірювальним пристроєм 14, відбивається від відбивача 38 на другому вимірювальному пристрої 18 на область розсіювання 34 на першому вимірювальному пристрої 14. Щонайменше одне зображення області розсіювання 34, зафіксоване камерою 36 другого вимірювального пристрою 18, аналізують для виявлення щонайменше однієї точки падіння (WV, PV) на область розсіювання 34 світлові пучки, відбиті відбивачем, і для визначення, виходячи з цього, відхилення поточного положення першого тіла від заданого положення першого тіла і відхилення поточного положення другого тіла від заданого положення другого тіла. При цьому зображення області розсіювання 34 можуть бути зафіксовані при різних положеннях обертання валів 10, 12 з подальшим аналізом цих зображень для виявлення при цих різних положеннях обертання точки падіння світлового пучка 28, відбитого відбивачем 38 на область розсіювання 34, і для визначення, виходячи з цього і з кута повороту різних положень обертання, зміряних інклінометрами 17, 19, горизонтального кутового зсуву і/або вертикальногокутового зсуву і/або горизонтальної непаралельності і/або вертикальної непаралельності першого і другого вала відносно заданого положення першого і/або другого вала 10, 12. Залежно від моделі смартфона і оптики камери між областю розсіювання 34 і камерою 36 зберігають мінімальну відстань для забезпечення належного фокусування камери 36. Ця відстань може бути великою. При установці вимірювальних пристроїв 14, 18 на валах 10, 12 оптичну вісь 39 камер 36 орієнтують перпендикулярно або майже перпендикулярно до області розсіювання 34. Вали 10 і 12 в заданих положеннях відцентровано співвісні або максимально близькі до співвісності відносно базисної осі 26; пристрій 8 з двома вимірювальними пристроями 14, 18 призначено зокрема для виявлення або визначення можливого горизонтального кутового зсуву і/або вертикального кутового зсуву, і/або горизонтальної неспіввісності, і/або вертикальної неспіввісності відносно базисної осі 26. Як правило, даний пристрій включає засоби індикації результатів, зокрема по кутовому зсуву або неспіввісності (на кресленнях не відображено). На додаток до джерела світла 24, що генерує світловий пучок 28, перший вимірювальний пристрій 14 включає коліматор (не показаний) для колімації (відомості в паралельний пучок) променів світла в пучку 28. Камера 36 забезпечена оптикою (не показано), що забезпечує проектування області розсіювання 34 на світлоприймач камери (не показаний). Область розсіювання 34 звернена до другого вимірювального пристрою 18, коли два вимірювальні пристрої 14, 18 виставлені в положення вимірювання. Можливий варіант розміщення джерела світла 24 позаду області розсіювання 34 (не проілюстровано) в межах видимості другого вимірювального пристрою 18, коли світловий пучок 28 випускається крізь отвір в області розсіювання 34. Відбивач 38 має першу зворотно-спрямовану [що відображає] поверхню 42 і другу зворотноспрямовану поверхню 44; відзеркалювальні поверхні 42, 44 розташовані під кутом (як правило, прямим) один до одного, утворюючи між собою ребро 46; у приведених прикладах відбивач виконаний у вигляді призми Порро (абодахоп одібної призми), у якої площини двох паралельних бічних граней мають форму рівних прямокутних трикутників, сполучених між собою суміжними прямокутними гранями, розташованими під прямим кутом до площин трикутників. Ребро 46 призм розташовано по дотичній до круглих поверхонь валів 10, 12. Область розсіювання 34 своєю тильною частиною (дивлячись від другого вимірювального пристрою 18) накладена на корпус 32 перші вимірювальні пристрої 14, який містить також джерело світла 24 і відповідну схемотехніку. Для мінімізації чутливості до коливань переважно використовувати випадково-імпульсне джерело випромінювання 24. Окрім вищезгаданого, в корпусі 32 розміщено джерело живлення (елементи живлення або акумуляторні батареї) джерела світла 24 і відповідні контури управління живленням. Загальна товщина корпусу 32 не повинна перевищувати товщину штирків 9 для його розміщення на настановному елементі 16 (див. фіг. 4). У корпус 32 може бути вбудований інклінометр 17 (див. фіг. 1, 2) з індикатором 33 (див. фіг. 3). Інклінометр 17 може бути виконаний за технологією МЕМС (MEMS - мікроелектромеханічних систем). 7 UA 114209 C2 5 10 15 20 25 30 35 40 45 50 55 Перший вимірювальний пристрій 14 переважно має конструкцію, при якій пучок або пучки світла 28, 30 від джерела випромінювання 24 націлені безпосередньо на відбивач 38 другого вимірювального пристрою 18 без використання якого-небудь проміжного елемента, що відображає, між джерелом 24 і відбивачем 38. Варіант реалізації, проілюстрований на фіг. 2, відрізняється від варіанта реалізації на фіг. 1 тим, що відбивач 38 забезпечений фронтальною поверхнею 40. Ця фронтальна поверхня 40 виконана з можливістю часткового віддзеркалення світлового пучка 28; що перша становить 28' світлового пучка відбивається від фронтальної поверхні 40 у напрямі області розсіювання 34, одночасно друга складова 28" світлового пучка 28 проходить крізь фронтальну поверхню 40 у напрямі другої зворотно-спрямованої поверхні 44, відбивається від неї на першу зворотноспрямовану поверхню 42, і звідти - через фронтальну поверхню 40 у напрямі області розсіювання 34. У наведених на фігурах прикладах точки падіння (світлові крапки) пучків світла 28' і 28" на область розсіювання 34 позначені як WV і PV. Здатність фронтальної поверхні 40 відображати світловий пучок 28 переважно розраховують так, щоб інтенсивність двох відбитих світлових пучків 28' і 28" була різною, забезпечуючи таким чином відмінність між двома точками падіння WV і PV на область розсіювання 34. При реалізації за варіантом на фіг. 2 пристрій відповідно до винаходу може бути обладнаний джерелом світла 24, здатним випромінювати другий світловий пучок 30 (позначений на фіг. 2 пунктиром) на додаток до першого світлового пучка 28, таким чином, що ці два світлові пучки 28, 30 випускатимуться в одному загальному напрямі, але відрізнятися по спектру (наприклад, джерело випромінювання 24 може бути виконаний у вигляді двоххвилевого лазерного діода, що емітує світловий пучок з довжиною хвилі приблизно 660 нм в червоному спектрі і світловий пучок приблизно 780 нм в інфрачервоному спектрі; як варіант джерело світла 24 може мати два лазерні діоди різних квітів). У подібному випадку фронтальна поверхня 40 відбивача 38 виконує функції кольоророзділювача; вона може бути виконана, наприклад, з можливістю сильніше відображати промені першого світлового пучка 28, ніж другого світлового пучка 30, і, відповідно, з більшою проникною здатністю для другого світлового пучка 30, чим для першого світлового пучка 28. Тоді, світловий пучок, позначений на фіг. 2 як 28", відповідає другому світловому пучку 30 після того, як він був пропущений фронтальною поверхнею 40 і відбитий двома зворотноспрямованими поверхнями 42, 44. І тоді світловий пучок, позначений на фіг. 2 як 28', відповідає першому світловому пучку 28, відбитому фронтальною поверхнею 40. Таким чином, дві точки падіння WV і PV розрізняються по спектральному складу і можуть бути легко розділені за допомогою кольорочуттєвої відеокамерою 36. У варіанті компоновки на фіг. 2 точка падіння WV (фіг. 3) світлового пучка 28', відбитого від фронтальної поверхні 40, показує величину кутового зсуву двох валів 10, 12, а точка PV падіння світлового пучка 28", відбитого від двох зворотно-спрямованих поверхонь 42, 44, показує величину неспіввісності цих двох валів 10, 12. На область розсіювання 34 (фіг. 3) нанесені масштабні маркери 50, наприклад, хрестоподібної форми, для спрощення аналізу зображень області розсіювання 34, зареєстрованих камерою 36. Може бути доданий зовнішнє джерело світла, такий як СИД (не показаний), щоб маркери 50 були видні в темноті. Зовнішнє СИД-джерело світла для підсвічування області розсіювання також може бути встановлений на смартфоне 15. Можливий варіант фонового підсвічування (не показано) області розсіювання 34. Наприклад, в листі металізованої фольги можна зробити відповідні вирізи і приклеїти його до матової поверхні з скла або пластика таким чином, що розсіюване біле світло проникатиме через корпус 32. Область розсіювання 34 переважно виконується плоскою або в основному плоскою. Область розсіювання 34 може бути зміщена назад (не показано) для кращого розподілу маси пристрою натягнення (див. також фіг. 4). Також є плата (не показана) з отвором для світлочутливого датчика (у самому низу, не показаний) і Bluetooth. Світлочутливий датчик призначений для настройки виходу лазерного променя по рівню зовнішнього засвічення. У пристроях на фіг. 1 і 2 камера 36 розміщена і оснащена з розрахунку відображення всій або як можна більшій частині області розсіювання 34. Камера 36 переважно укомплектована оптикою із стаціонарними лінзами. У іншому випадку камера 36 смартфона 15 може бути оснащена трансфокатором. Роздільна здатність камери переважно складає щонайменше 8 мегапикселей. Камера переважно працює в режимі макрозйомки. 8 UA 114209 C2 5 10 15 20 25 30 35 40 45 50 55 Оскільки камера 36 зв'язана з або вбудована в смартфон 15, дисплей смартфона зручно використовувати як графічний інтерфейс користувача (ГІК/GUI); у іншому випадку оператор для управління може використовувати додатковий пристрій подібного типу, наприклад, смартфон або планшетний комп'ютер. Також успішно можуть бути використані головний мікротелефон або гарнітура "Гугл гласс/Google Glass". Камера 36 пристроїв на фіг. 1 і 2 переважно забезпечена функцією OCR (оптичного розпізнавання символів), щоб прочитувати показники кута нахилу, що відображається на дисплеї інклінометра 17 або 19. Передбачений також варіант прямої передачі величини кута на камеру 36, наприклад, через Bluetooth. Оскільки камера 36 є камерою 16 смартфона 15, інклінометр, часто вбудований в нього, також може служити для визначення кута нахилу. При аналізі зображень з камери 36 може бути зроблена корекція систематичних помилок, викликаних, наприклад ребром призми 46. Аналіз зображень виконують з використанням обчислювального пристрою 22, яке може включати компонент камери, особливо, якщо камера 36 зв'язана із смартфоном 15, оскільки обчислювальний пристрій володіє достатньо великою обчислювальною потужністю. Перед початком вимірювання за допомогою пристрою на фіг. 2 два вимірювальні пристрої 14, 18 спочатку виставляють щодо один одного, щоб відбиті світлові пучки 28', 28" падали приблизно в центр області розсіювання 34 (на фіг. 2 не відображено). Для цього, наприклад, другий вимірювальний пристрій 18 може бути забезпечено механізмом регулювання висоти (не показаний), що дозволяє юстирувати положення другого вимірювального пристрою 18 в радіальному напрямі відносно вала 12, і механізмом регулювання кута нахилу другого вимірювального пристрою 18 відносно радіального напряму вала 12 з можливістю регулювання положення навколо радіального напряму. Після виставляння двох вимірювальних пристроїв 14, 18 зі встановленими на них вимірювальними пристроями 14, 18 відносно один одного точки падіння відбитих світлових пучків 28', 28" в принципі повинні відображати розузгодження між ними при обертанні навколо осі 26; після цього можна від стежити і проаналізувати звичайним способом траєкторію кожної точки падіння [світлового пучка] залежно від кута повороту (який, у свою чергу, може бути визначений за допомогою інклінометра) для виявлення горизонтального кутового зсуву і/або вертикального кутового зсуву, і/або горизонтальної неспіввісності, і/або вертикальної неспіввісності валів 10, 12, особливо - відносно заданого положення першого і другого валів 10, 12 (така методика описана, наприклад, в DE 39 11 307 А1 для одного світлового пучка). Якщо відбивач 38 пристроїв на фіг. 2 виконаний у формі трикутної призми, точка падіння пучка світла 28", відбитого зворотно-спрямованими площинами 42, 44, указує на неспіввісність в обох напрямах. Після виявлення розузгодження або відхилення від заданого положення виконують регулювання валів 10, 12 в певному кутовому положенні; в процесі такого регулювання валів виконують вимірювання для встановлення моменту найбільш ефективного коректування такого розузгодження. Така методика описана, наприклад, в DE 39 11 307 А1. Якщо використовується трикутна призма, юстирування валів може здійснюватися, наприклад, в положенні "12 годин" цих двох вимірювальних пристроїв 14, 18. Якщо використовується призма Порро (або дахоподібна призма), юстирування валів може виконуватися, наприклад, в положеннях "3 години" або "9 годин". В процесі виконання вимірювань орієнтації в ході виставляння валів камера працює в режимі реєстрації зображень області розсіювання 34 безперервно і з достатньо високою частотою; за одну секунду може бути зроблене порядка п'яти знімків. Внаслідок того, що камера зв'язана з або вбудована в смартфон, реєстрація і оцінка зображень можуть виконуватися, наприклад, з використанням відповідних програмних застосувань (див. також вище). Можливий режим безперервного запису зображень, при якому знімок робиться, наприклад, виходячи з поточного кута нахилу, допустимий, кожного разу, коли кут міняється на певну величину, наприклад, на 1°. Комплектація пристроїв по винаходу на фіг. 1 і 2 може як опція включати головну гарнітуру Bluetooth, яку оператор, відповідальний за регулювання валів, носить на голові і отримує по безпровідному зв'язку акустичні сигнали із значеннями розузгодження, розрахованими обчислювальним пристроєм 22. У цьому полягає більше перевага, оскільки операторові буває важко в ході виконання операції відладки стежити за показниками на дисплеї смартфона 15. За допомогою головної гарнітури Bluetooth можна також здійснювати голосове управління смартфоном 15. 9 UA 114209 C2 5 10 15 20 25 30 35 40 45 Крім того, можливий підхід, при якому оператор, використовуючи другий смартфон або планшетний комп'ютер, стежить за свідченнями смартфона 15, що виконує функції відеокамери, керованої по каналу Bluetooth (наприклад, VNC), в легшому для читання для себе вигляді; управління смартфоном 15 можна також здійснювати через другий смартфон або планшетний комп'ютер за допомогою сенсорного екрана (см також WO 97/36146). Проектована поверхня зазвичай складає приблизно 4040 мм; піксель, таким чином, відповідає 20 мкм з розрахунку роздільної здатності камери в 8 мегапікселів (що відповідає приблизно 2 500 пікселям по вертикалі). Тобто, якщо застосувати компактну камеру з дозволом, припустимо, 16 мегапікселів, то можна досягти роздільної здатності близько 7 мкм. Більш того, можливий варіант застосування камери із спеціальною оптикою або смартфона із збільшуючою лінзою перед об'єктивом. Окрім цього, можуть бути зменшені розміри області розсіювання, що відображається, 34, наприклад, до формату від 2020 мм до 3030 мм. Зрозуміло, що зображення з камери 36 пересилаються по безпровідному зв'язку (наприклад, WiFi), на мобільну платформу. В цьому випадку застосовна спеціальна SD-карта. Застосування смартфона як відеореєстратору забезпечує безліч переваг: такі пристрої дуже гнучкі і достатньо могутні для програмування і побудови графічного інтерфейсу користувача; зокрема, потенційно застосовні такі опції, як розпізнавання жестів, відображення клавіатури і локалізація (встановлення місцезнаходження шуканого об'єкту). При цьому користувач, що виконує функції оператора, що координує переміщення робочих елементів, може використовувати той пристрій, з яким він вже добре знайомий. До цього можна додати те, що смартфони пропонують безліч інтерфейсів, наприклад, для ведення баз даних технічного супроводу; зокрема, забезпечуються безпровідною інтерфейс доступу до мобільних операційних платформ, використання навушників (з ехо- і шумозаглушенням), гарнітури Google Glass, вібропояси і так далі При цьому смартфон може бути використаний по прямому призначенню в проміжках часу, коли він не задіяний в режимі моніторингу орієнтації. Один з варіантів реалізації винаходу передбачає наявність в області розсіювання 34 безліч двомірних оптичних кодів, наприклад QR-коди, як правило, нанесених по всій області розсіювання у вигляді сіткового шаблона; таке кодування на області розсіювання несе в собі інформацію про саму область розсіювання, про вимірювальний пристрій, на який вона нанесена, наприклад, заводський номер вимірювального пристрою, розміри області розсіювання по осях X і Υ (наприклад, в мм), поправочні коефіцієнти точності або погрішності принтера, що надрукував дану область розсіювання (наприклад, значення розтягування або стиснення в напрямах X і Υ), кількість кодів на даній області розсіювання, розташування кожного коду в сітці (номер рядка і стовпця), і відстань кожного коду від опорної точки системи координат області розсіювання (наприклад, в мкм). Індивідуальні коди можуть бути розташовані, наприклад, торкаючись один іншого і покриваючи всю область розсіювання (див., наприклад, фіг. 5, де позначені коди 60А, 60В, 60С, 60D). Кількість і чіткість кодів повинна бути оптимізовані, щоб відображати роздільну здатність принтера і камери. Разом з QR-кодом, в принципі, можуть використовуватися інші патентовані графічні коди. Нанесення графічних код на область розсіювання 34 має такі переваги, як: відсутність необхідності відеофіксації всієї поверхні відбивача із запасом міцності, що спрощує завдання оператора. Коди можуть бути реконструйовані з метою генерації заданого зображення для забезпечення доступності оптимальних значень крапок для лінеаризації зображень області розсіювання (внутрішніх і зовнішніх параметрів). Коди на області розсіювання можуть бути ідентифіковані як такі на основі особливих маркерів. При визначенні точок падіння може бути досягнуте якнайкраще положення. Область розсіювання може бути скоректована з урахуванням ступеня прецизійності принтера, за допомогою якого надрукована область розсіювання. ФОРМУЛА ВИНАХОДУ 50 55 60 1. Пристрій (8) для виявлення відхилення двох тіл (10, 12) від заданого положення, що включає перший вимірювальний пристрій (14), встановлений на першому тілі (10), другий вимірювальний пристрій (18), встановлений на другому тілі (12), і обчислювальний пристрій (22); при цьому перший вимірювальний пристрій (14) має засіб (24) генерації щонайменше одного світлового пучка (28) і область розсіювання (34) падаючого на неї світла; при цьому другий вимірювальний пристрій (18) має відбивач (38), звернений до першого вимірювальним пристроєм (14), коли вказані вимірювальні пристрої (14, 18) встановлені на відповідних тілах (10, 12), призначений для віддзеркалення світлового пучка (28) на область розсіювання (34), і при цьому другий вимірювальний пристрій (18) має відеокамеру (36) для реєстрації зображень області розсіювання (34); при цьому обчислювальний пристрій (22) виконаний з можливістю визначення 10 UA 114209 C2 5 10 15 20 25 30 35 40 щонайменше однієї точки падіння на область розсіювання (34) світлового пучка (28), відбитого відбивачем (38), за відеоданими, отриманими з камери (36), і виявлення по такій точці падіння відхилення положення першого тіла (10) від заданого положення першого тіла (10) і відхилення положення другого тіла (12) від заданого положення другого тіла (12). 2. Пристрій за п. 1, який відрізняється тим, що камера (36) встановлена знімно на відбивачі (38). 3. Пристрій за п. 2, який відрізняється тим, що камера (36) встановлена знімно на відбивачі (38) за допомогою монтажного кронштейна (11), приєднаного до відбивача (38) з боку, оберненого від області розсіювання (34). 4. Пристрій за п. 1, який відрізняється тим, що другий вимірювальний пристрій (18) додатково має смартфон (15), при цьому відеокамера (36) змонтована на смартфоні (15). 5. Пристрій за п. 4, який відрізняється тим, що смартфон (15) встановлений на відбивачі (38) за допомогою монтажного кронштейна (11), приєднаного до відбивача (38) з боку, оберненого від області розсіювання (34). 6. Пристрій за п. 5, який відрізняється тим, що смартфон (15) встановлений знімно за допомогою монтажного кронштейна (11). 7. Пристрій за п. 5, який відрізняється тим, що смартфон (15) встановлений знімно і рухомо відносно опори на монтажному кронштейні (11). 8. Пристрій за будь-яким пунктів 4-7, який відрізняється тим, що смартфон (15) зв'язаний з обчислювальним пристроєм (22). 9. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що першим тілом (10) є перший вал (10), а другим тілом (12) є другий вал (12), при цьому перший вимірювальний пристрій (14) встановлено на круглій поверхні першого вала (10), а другий вимірювальний пристрій (18) встановлено на круглій поверхні другого вала (12), пристрій включає щонайменше один інклінометр (17, 19) для вимірювання кута повороту першого вала (10) і/або другого вала (12) в положенні обертання, пристрій включає обчислювальний пристрій (22), призначений для визначення горизонтального кутового зсуву і/або вертикального кутового зсуву, і/або горизонтальної неспіввісності, і/або вертикальної неспіввісності першого і другого валів відносно заданого положення першого і другого валів (10, 12), виходячи з кута повороту, виміряного в різних положеннях обертання першого і/або другого вала, і виходячи з точки падіння на область розсіювання (34) світлового пучка, відбитого відбивачем (38) в цих положеннях обертання. 10. Спосіб виявлення відхилення від заданого положення двох тіл (10, 12), де перший вимірювальний пристрій (14) розміщують на першому тілі (10) з двох тіл (10, 12), а другий вимірювальний пристрій (18) розміщують на другому тілі (12) з двох тіл (10, 12); де світловий пучок (28), що генерують першим вимірювальним пристроєм (14), відбивається на область розсіювання (34) на першому вимірювальному пристрої (14) відбивачем (38) на другому вимірювальному пристрої (18); де щонайменше одне зображення області розсіювання (34) реєструють камерою (36), що встановлюють на другий вимірювальний пристрій (18), і де це щонайменше одне зображення аналізують для визначення щонайменше однієї точки падіння (WV, PV) на область розсіювання (34) світлового пучка, відбитого відбивачем, і для виявлення по цій точці відхилення положення першого тіла від заданого положення першого тіла і відхилення положення другого тіла від заданого положення другого тіла. 11 UA 114209 C2 12 UA 114209 C2 13 UA 114209 C2 Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 14
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01B 11/27, G01P 3/36
Мітки: заданого, положення, пристрій, двох, відхілення, тіл, спосіб, визначення
Код посилання
<a href="https://ua.patents.su/16-114209-pristrijj-i-sposib-viznachennya-vidkhilennya-dvokh-til-vid-zadanogo-polozhennya.html" target="_blank" rel="follow" title="База патентів України">Пристрій і спосіб визначення відхилення двох тіл від заданого положення</a>
Пристрій і спосіб для визначення положення двох зчленованих валів щодо один одного
Номер патенту: 110377
Опубліковано: 25.12.2015
Автори: Вегенер Мартін, Конечний Волкер, Кану Гіанлука, Гласер Бернхард
МПК: G01P 3/36, G01M 11/00, G01B 11/14, G01M 13/00, G01B 11/27
Мітки: спосіб, зчленованих, одного, валів, положення, пристрій, двох, визначення
Формула / Реферат:
1. Пристрій для визначення положення першого вала (10) і сполученого з першим валом за допомогою зчленування (14) другого вала (12) щодо один одного, що містить один вимірювальний модуль, який встановлюється на периферійній поверхні першого вала, і другий вимірювальний модуль, що встановлюється на периферійній поверхні другого вала, а також блок обробки результатів (30), причому як мінімум один з двох вимірювальних модулів оснащений засобами...
Пристрій для визначення взаємного положення двох по суті плоских елементів
Номер патенту: 89431
Опубліковано: 25.01.2010
Автори: Грумм Харальд, Хюбш Вольфрам, Куртц Райнер, Каннон Марк
Мітки: суті, плоских, положення, визначення, взаємного, елементів, пристрій, двох
Формула / Реферат:
1. Пристрій для визначення взаємного положення в площині X-Y двох по суті плоских елементів, розташованих по суті один над іншим на відстані один від одного у напрямі Z, що містить щонайменше один розташований між вказаними елементами оптичний реєструючий прилад, що дозволяє реєструвати щонайменше по дві точки на звернених одна до одної поверхнях елементів, і блок обробки, виконаний з можливістю аналізу зображень точок відносно їх взаємного...
Пристрій для визначення відхилення частоти напруги живлення радіоелектронної апаратури

Номер патенту: 70222
Опубліковано: 15.06.2006
Автори: Калатай Володимир Євгенович, Зайцев Анатолій Якимович, Яновський Юрій Васильович, Ліпатов Валерій Павлович, Дрьомов Сергій Тимофійович
МПК: G01R 23/00
Мітки: напруги, частоти, визначення, живлення, апаратури, радіоелектронної, відхілення, пристрій
Формула / Реферат:
1. Спосіб очищення бурових стічних вод, який включає подачу і осадження їх в роздільнику, забезпеченому пластинами, видалення фільтрату і твердої фази, який відрізняється тим, що перед подачею в роздільник бурові стічні води заздалегідь змішують з флокулянтом і коагулянтом, а після осадження з поверхні роздільника відбирають нафтопродукти.2.Спосіб за п. 1, який відрізняється тим, що фільтрат після осадження подають на фільтр тонкого...
Пристрій для визначення у системі залишкових класів числа, найближчого до заданого
Номер патенту: 47630
Опубліковано: 15.07.2002
Автор: Поліський Юрій Давидович
МПК: G06F 7/483, G06F 7/04
Мітки: класів, пристрій, найближчого, системі, заданого, визначення, залишкових, числа
Формула / Реферат:
Пристрій для визначення у системі залишкових класів числа, найближчого до заданого, що містить в собі схему порівняння та n+1 вузлів аналізу, кожний із яких складається із суматора, регістра, схеми порівняння, першого елемента І, елемента АБО, причому виходи регістра з'єднані з першими входами своєї схеми порівняння та другими входами суматора, перші входи якого підключені до виходу першого елемента І, перші виходи суматора подані до входів...
Спосіб і пристрій для визначення положення видовженого об’єкта відносно поверхні тіла-перепони за допомогою електромагнітного випромінювання
Номер патенту: 69402
Опубліковано: 15.09.2004
Автори: Бруун Ніколай, Обое Єнсен Томас, Лундгрен Ян, Теллєр Стеен
МПК: B23K 26/04, G01B 11/00, B23K 26/02, G01B 15/00, G01S 17/06
Мітки: тіла-перепони, електромагнітного, об'єкта, допомогою, пристрій, випромінювання, поверхні, відносної, видовженого, визначення, положення, спосіб
Формула / Реферат:
1. Спосіб визначення положення видовженого, порівняно вузького об'єкта відносно поверхні переважно дископодібного тіла-перепони, розміщеного перед згаданим об'єктом і орієнтованого під кутом до нього, за допомогою електромагнітного випромінювання, зокрема іонізувального випромінювання, для керування переміщенням з'єднаного з ним устаткування для обробки, зокрема для лазерного зварювання, який відрізняється тим, що зі сторони тіла-перепони,...
Попередній патент: Спосіб контрольованої хімічної реакції поверхні твердого наповнювача та добавок для одержання поверхнево-обробленого матеріалу наповнювача
Наступний патент: Спосіб виробництва коньяку
Випадковий патент: Застосування каталізатора, що включає модифікований фосфором цеоліт, в процесі дегідратації для перетворення спирту