Спосіб визначення відносного положення рухомих транспортних засобів і система для його здійснення

Формула / Реферат
1. Спосіб визначення відносного положення первинного транспортного засобу відносно вторинного транспортного засобу, що включає наступні стадії: стадію, на якій передають перший сигнал передачі з первинного трансивера первинного транспортного засобу у перший транспондер та другий транспондер, що пов'язані з вторинним транспортним засобом, причому антена першого транспондера та антена другого транcпондера пов'язані з опорними точками вторинного транспортного засобу, рознесеними на певну відстань;
стадію, на якій передають другий сигнал передачі з першого транспондера вторинного транспортного засобу на перший радіомаяк первинного транспортного засобу та у первинний трансивер, причому антена первинного трансивера й антена першого радіомаяка пов'язані з опорними точками первинного транспортного засобу, рознесеними на певну відстань; стадію, на якій передають третій сигнал передачі з другого транспондера вторинного транспортного засобу на перший радіомаяк первинного транспортного засобу та у первинний трансивер; стадію, на якій визначають відповідні часи проходження, пов'язані з першим сигналом передачі, другим сигналом передачі та третім сигналом передачі; стадію, на якій оцінюють відносне положення первинного транспортного засобу відносно вторинного транспортного засобу, використовуючи опорні точки первинного транспортного засобу, опорні точки вторинного транспортного засобу та визначені часи проходження.
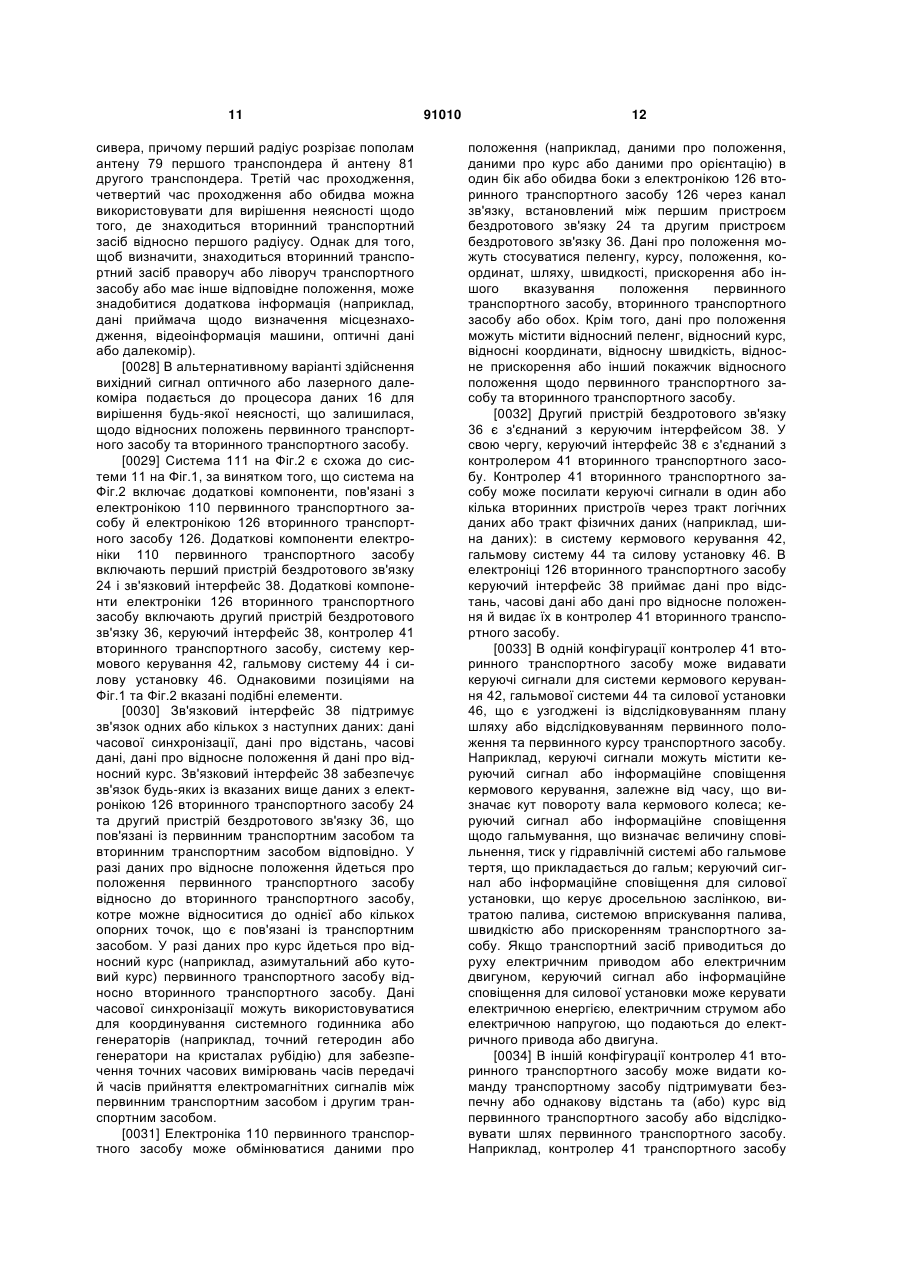
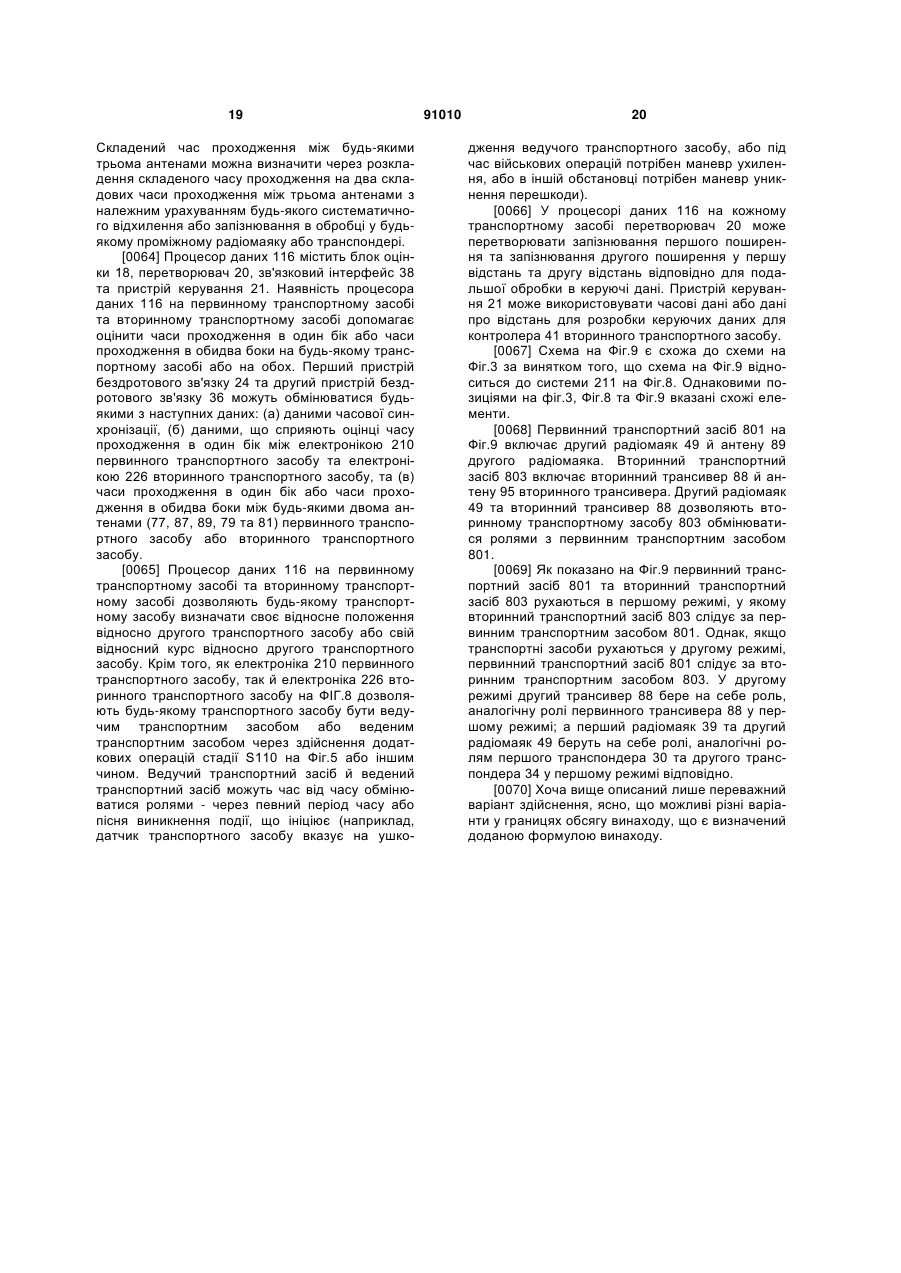
2. Спосіб за п. 1, який відрізняється тим, що у визначення відповідних часів проходження включають визначення (а) першого часу проходження, пов'язаного з першим сигналом передачі між антеною первинного трансивера й антеною першого транспондера, (б) другого часу проходження, пов'язаного з першим сигналом передачі між антеною первинного трансивера й антеною другого транспондера; (в) третього часу проходження, пов'язаного з другим сигналом передачі між першим транспондером і першим радіомаяком; (г) четвертого часу проходження, пов'язаного із третім сигналом передачі між другим транспондером і першим радіомаяком.
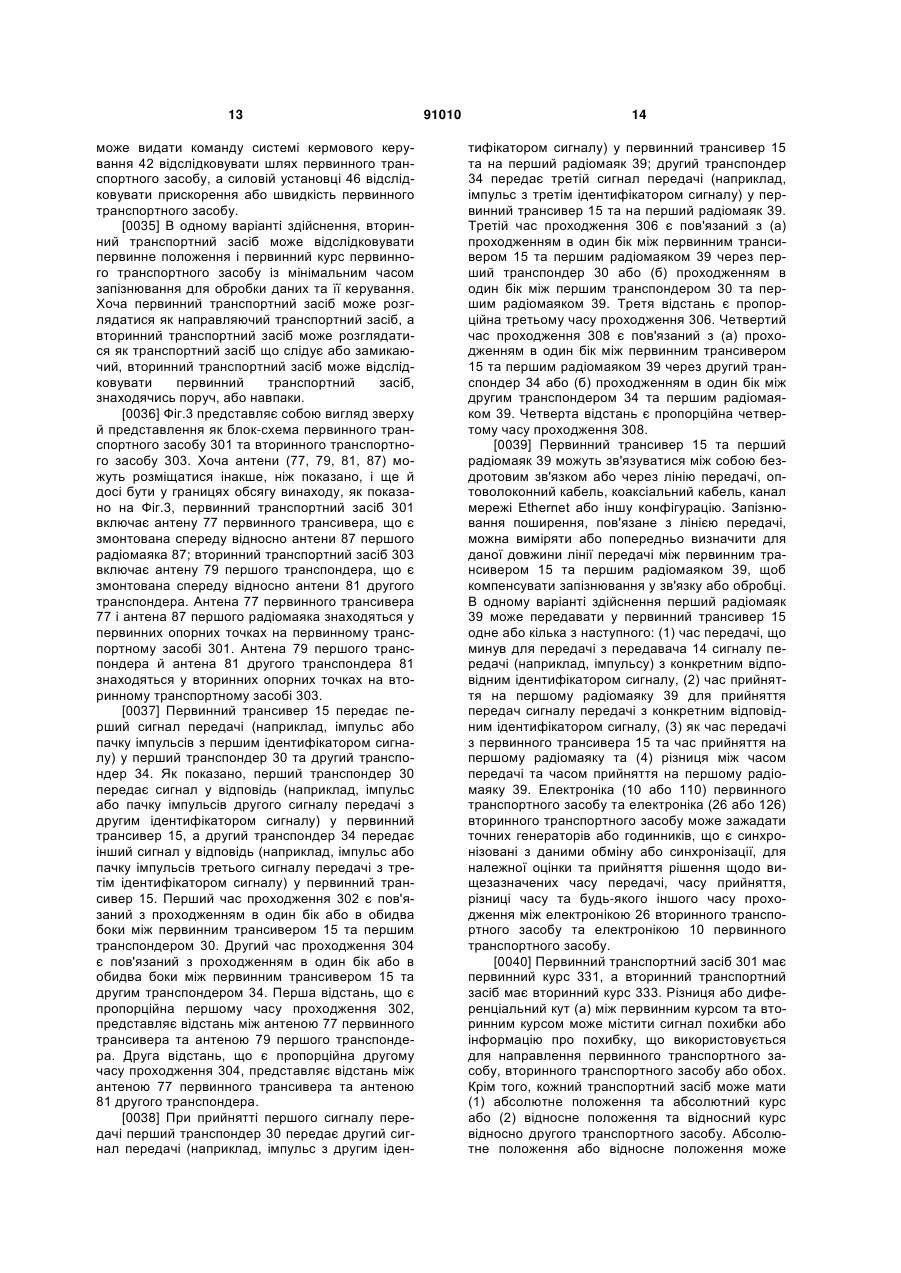
3. Спосіб за п. 2, який відрізняється тим, що в оцінку далі включають оцінку відносного положення первинного транспортного засобу відносно вторинного транспортного засобу, використовуючи опорні точки первинного транспортного засобу, опорні точки вторинного транспортного засобу, визначені перший час проходження, другий час проходження та принаймні один з третього часу проходження та четвертого часу проходження.
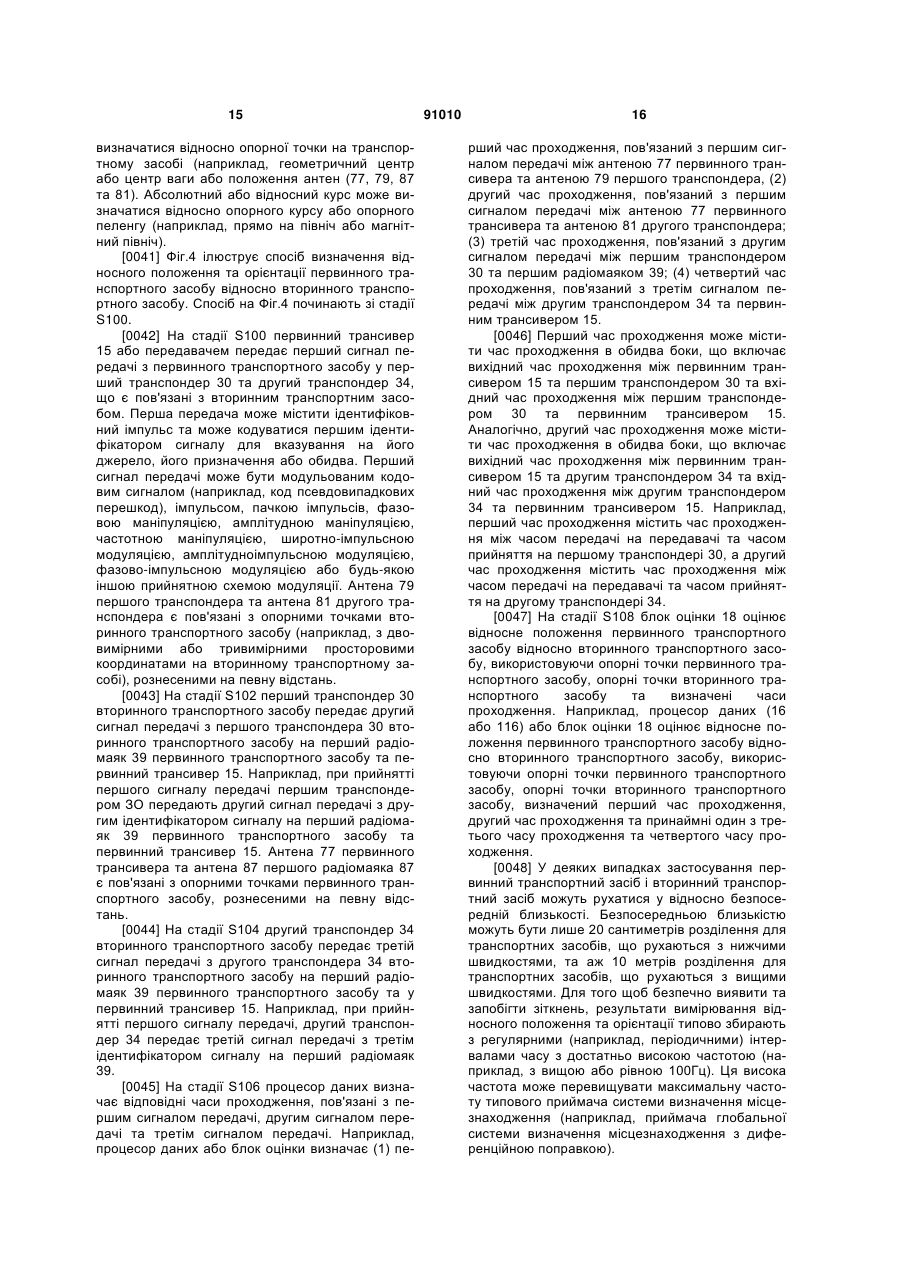
4. Спосіб за п. 1, який відрізняється тим, що додатково включає: стадію, на якій керують вторинними курсом вторинного транспортного засобу, щоб взагалі відслідковувати первинний курс первинного транспортного засобу.
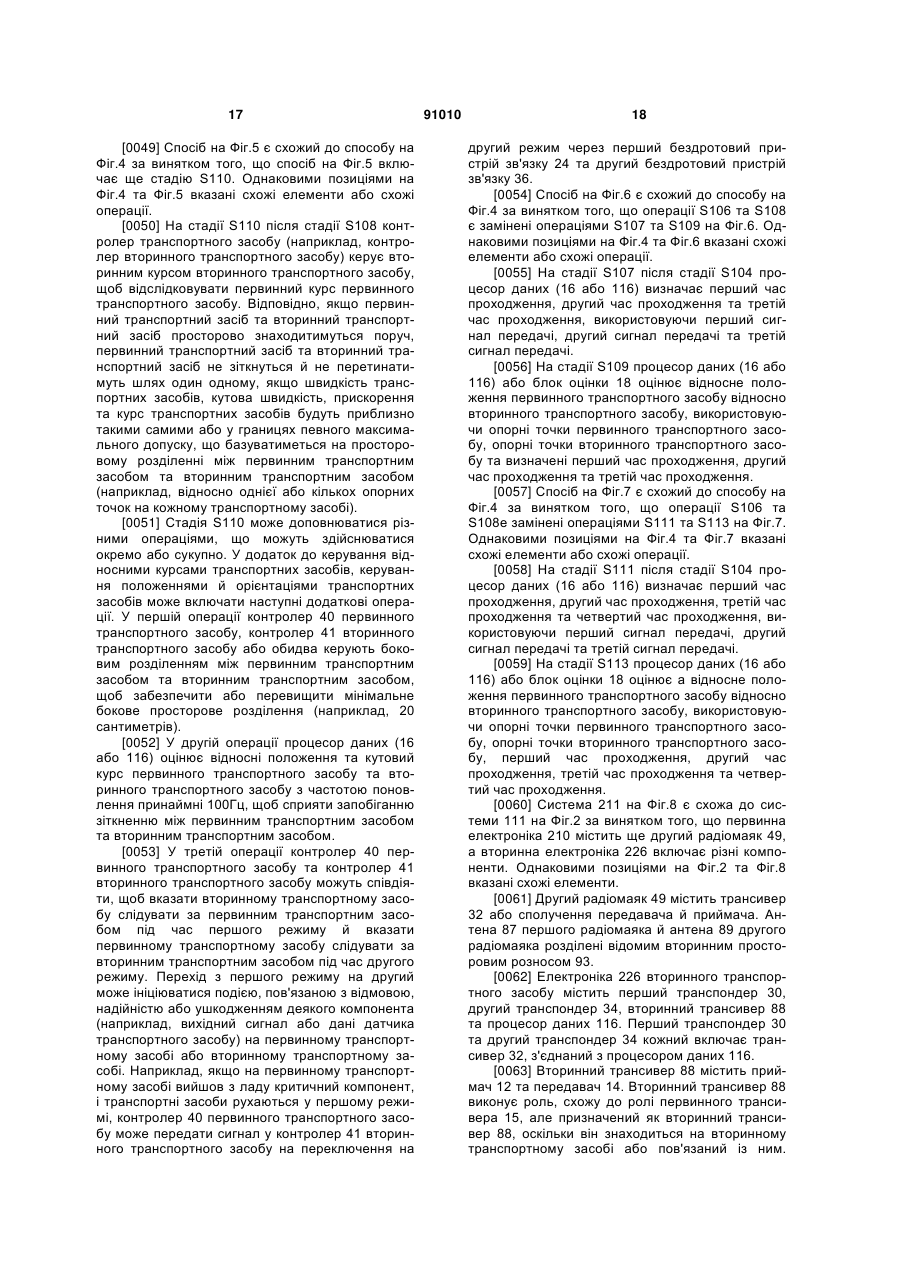
5. Спосіб за п. 1, який відрізняється тим, що додатково включає: стадію, на якій керують боковим розділенням між первинним транспортним засобом та вторинним транспортним засобом, щоб забезпечити або перевищити мінімальне бокове просторове розділення.
6. Спосіб за п. 1, який відрізняється тим, що додатково включає: стадію, на якій оцінюють відносні положення та кутовий курс первинного транспортного засобу та вторинного транспортного засобу з частотою поновлення принаймні 100 Гц, щоб сприяти запобіганню зіткненню між первинним транспортним засобом та вторинним транспортним засобом.
7. Спосіб за п. 1, який відрізняється тим, що додатково включає: стадію, на якій вказують вторинному транспортному засобу слідувати за первинним транспортним засобом під час першого режиму; стадію, на якій вказують первинному транспортному засобу слідувати за вторинним транспортним засобом під час другого режиму.
8. Спосіб за п. 1, який відрізняється тим, що при оцінці перший час проходження й другий час проходження встановлюють радіус вторинного транспортного засобу відносно первинного транспортного засобу, причому третій час проходження встановлює покажчик азимуту вторинного транспортного засобу відносно первинного транспортного засобу.
9. Спосіб за п. 1, який відрізняється тим,що перший час проходження включає час проходження між часом передачі на передавачі та часом прийняття на першому транспондері, причому другий час проходження включає час проходження між часом передачі на передавачі та часом прийняття на другому транспондері.
10. Спосіб за п. 9, який відрізняється тим, що додатково включає: стадію, на якій перетворюють перший час проходження та другий час проходження у першу відстань та другу відстань відповідно.
11. Система для визначення відносного положення первинного транспортного засобу відносно вторинного транспортного засобу, що містить: первинний трансивер для передачі першого сигналу передачі з первинного трансивера первинного транспортного засобу у перший транспондер та другий транспондер, що пов'язані з вторинним транспортним засобом, причому антена першого транспондера й антена другого транспондера пов'язані з опорними точками вторинного транспортного засобу, рознесеними на певну відстань; перший транспондер для передачі другого сигналу передачі з першого транспондера вторинного транспортного засобу на перший радіомаяк первинного транспортного засобу та у первинний трансивер, причому антена первинного трансивера й антена першого радіомаяка пов'язані з опорними точками первинного транспортного засобу, рознесеними на певну відстань; другий транспондер для передачі третього сигналу передачі з другого транспондера вторинного транспортного засобу на перший радіомаяк первинного транспортного засобу та у первинний трансивер; блок оцінки для визначення відповідних часів проходження, пов'язаних з першим сигналом передачі, другим сигналом передачі та третім сигналом передачі; процесор даних для оцінки відносного положення первинного транспортного засобу відносно вторинного транспортного засобу, використовуючи опорні точки первинного транспортного засобу, опорні точки вторинного транспортного засобу та визначені часи проходження.
12. Система за п. 11, яка відрізняється тим, що блок оцінки визначає відповідні часи проходження як перший час проходження, пов'язаний з (а) першим сигналом передачі між антеною первинного трансивера й антеною першого транспондера, (б) другий час проходження, пов'язаний з першим сигналом передачі між антеною первинного трансивера й антеною другого транспондера; (в) третій час проходження, пов'язаний з другим сигналом передачі між першим транспондером і першим радіомаяком; (г) четвертий час проходження, пов'язаний із третім сигналом передачі між другим транспондером і першим радіомаяком.
13. Система за п. 12, яка відрізняється тим, що процесор даних оцінює відносне положення первинного транспортного засобу відносно вторинного транспортного засобу, використовуючи первинне просторове розділення, вторинне просторове розділення, визначені перший час проходження, другий час проходження та принаймні один з третього часу проходження та четвертого часу проходження.
14. Система за п. 11, яка відрізняється тим, що додатково включає: контролер вторинного транспортного засобу, встановлений для керування вторинним курсом вторинного транспортного засобу, щоб взагалі відслідковувати первинний курс первинного транспортного засобу.
15. Система за п. 11, яка відрізняється тим, що додатково включає: контролер вторинного транспортного засобу, встановлений для керування боковим розділенням між первинним транспортним засобом та вторинним транспортним засобом, щоб забезпечити або перевищити мінімальне бокове просторове розділення.
16. Система за п. 11, яка відрізняється тим, що процесор даних оцінює відносні положення та кутовий курс первинного транспортного засобу та вторинного транспортного засобу з частотою поновлення принаймні 100 Гц, щоб сприяти запобіганню зіткненню між первинним транспортним засобом та вторинним транспортним засобом.
17. Система за п. 11, яка відрізняється тим, що містить контролер первинного транспортного засобу та контролер вторинного транспортного засобу, щоб вказувати вторинному транспортному засобу слідувати за первинним транспортним засобом під час першого режиму та вказувати первинному транспортному засобу слідувати за вторинним транспортним засобом під час другого режиму.
18. Система за п. 11, яка відрізняється тим, що в оцінках процесора даних перший час проходження й другий час проходження встановлюють радіус вторинного транспортного засобу відносно первинного транспортного засобу, причому третій час проходження встановлює покажчик азимуту вторинного транспортного засобу відносно первинного транспортного засобу.
19. Система за п. 11, яка відрізняється тим, що процесор даних оцінює перший час проходження, що включає час проходження між часом передачі на передавачі та часом прийняття на першому транспондері, та другий час проходження, що включає час проходження між часом передачі на передавачі та часом прийняття на другому транспондері.
20. Система за п. 19, яка відрізняється тим, що додатково включає перетворювач для перетворення першого часу проходження та другого часу проходження у першу відстань та другу відстань відповідно.
Текст
1. Спосіб визначення відносного положення первинного транспортного засобу відносно вторинного транспортного засобу, що включає наступні стадії: стадію, на якій передають перший сигнал передачі з первинного трансивера первинного транспортного засобу у перший транспондер та другий транспондер, що пов'язані з вторинним транспортним засобом, причому антена першого транспондера та антена другого транcпондера пов'язані з опорними точками вторинного транспортного засобу, рознесеними на певну відстань; стадію, на якій передають другий сигнал передачі з першого транспондера вторинного транспортного засобу на перший радіомаяк первинного транспортного засобу та у первинний трансивер, причому антена первинного трансивера й антена першого радіомаяка пов'язані з опорними точками первинного транспортного засобу, рознесеними на певну відстань; стадію, на якій передають третій сигнал передачі з другого транспондера вторинного транспортного засобу на перший радіомаяк первинного транспортного засобу та у первинний трансивер; стадію, на якій визначають відповідні часи проходження, пов'язані з першим сигналом передачі, другим сигналом передачі та третім сигналом передачі; ста 2 (19) 1 3 щоб сприяти запобіганню зіткненню між первинним транспортним засобом та вторинним транспортним засобом. 7. Спосіб за п.1, який відрізняється тим, що додатково включає: стадію, на якій вказують вторинному транспортному засобу слідувати за первинним транспортним засобом під час першого режиму; стадію, на якій вказують первинному транспортному засобу слідувати за вторинним транспортним засобом під час другого режиму. 8. Спосіб за п.1, який відрізняється тим, що при оцінці перший час проходження й другий час проходження встановлюють радіус вторинного транспортного засобу відносно первинного транспортного засобу, причому третій час проходження встановлює покажчик азимуту вторинного транспортного засобу відносно первинного транспортного засобу. 9. Спосіб за п.1, який відрізняється тим, що перший час проходження включає час проходження між часом передачі на передавачі та часом прийняття на першому транспондері, причому другий час проходження включає час проходження між часом передачі на передавачі та часом прийняття на другому транспондері. 10. Спосіб за п.9, який відрізняється тим, що додатково включає: стадію, на якій перетворюють перший час проходження та другий час проходження у першу відстань та другу відстань відповідно. 11. Система для визначення відносного положення первинного транспортного засобу відносно вторинного транспортного засобу, що містить: первинний трансивер для передачі першого сигналу передачі з первинного трансивера первинного транспортного засобу у перший транспондер та другий транспондер, що пов'язані з вторинним транспортним засобом, причому антена першого транспондера й антена другого транспондера пов'язані з опорними точками вторинного транспортного засобу, рознесеними на певну відстань; перший транспондер для передачі другого сигналу передачі з першого транспондера вторинного транспортного засобу на перший радіомаяк первинного транспортного засобу та у первинний трансивер, причому антена первинного трансивера й антена першого радіомаяка пов'язані з опорними точками первинного транспортного засобу, рознесеними на певну відстань; другий транспондер для передачі третього сигналу передачі з другого транспондера вторинного транспортного засобу на перший радіомаяк первинного транспортного засобу та у первинний трансивер; блок оцінки для визначення відповідних часів проходження, пов'язаних з першим сигналом передачі, другим сигналом передачі та третім сигналом передачі; процесор даних для оцінки відносного положення первинного транспортного засобу відносно вторинного транспортного засобу, використовуючи опорні точки первинного транспортного засобу, опорні точки вторинного транспортного засобу та визначені часи проходження. 12. Система за п.11, яка відрізняється тим, що блок оцінки визначає відповідні часи проходжен 91010 4 ня як перший час проходження, пов'язаний з (а) першим сигналом передачі між антеною первинного трансивера й антеною першого транспондера, (б) другий час проходження, пов'язаний з першим сигналом передачі між антеною первинного трансивера й антеною другого транспондера; (в) третій час проходження, пов'язаний з другим сигналом передачі між першим транспондером і першим радіомаяком; (г) четвертий час проходження, пов'язаний із третім сигналом передачі між другим транспондером і першим радіомаяком. 13. Система за п.12, яка відрізняється тим, що процесор даних оцінює відносне положення первинного транспортного засобу відносно вторинного транспортного засобу, використовуючи первинне просторове розділення, вторинне просторове розділення, визначені перший час проходження, другий час проходження та принаймні один з третього часу проходження та четвертого часу проходження. 14. Система за п.11, яка відрізняється тим, що додатково включає: контролер вторинного транспортного засобу, встановлений для керування вторинним курсом вторинного транспортного засобу, щоб взагалі відслідковувати первинний курс первинного транспортного засобу. 15. Система за п.11, яка відрізняється тим, що додатково включає: контролер вторинного транспортного засобу, встановлений для керування боковим розділенням між первинним транспортним засобом та вторинним транспортним засобом, щоб забезпечити або перевищити мінімальне бокове просторове розділення. 16. Система за п.11, яка відрізняється тим, що процесор даних оцінює відносні положення та кутовий курс первинного транспортного засобу та вторинного транспортного засобу з частотою поновлення принаймні 100 Гц, щоб сприяти запобіганню зіткненню між первинним транспортним засобом та вторинним транспортним засобом. 17. Система за п.11, яка відрізняється тим, що містить контролер первинного транспортного засобу та контролер вторинного транспортного засобу, щоб вказувати вторинному транспортному засобу слідувати за первинним транспортним засобом під час першого режиму та вказувати первинному транспортному засобу слідувати за вторинним транспортним засобом під час другого режиму. 18. Система за п.11, яка відрізняється тим, що в оцінках процесора даних перший час проходження й другий час проходження встановлюють радіус вторинного транспортного засобу відносно первинного транспортного засобу, причому третій час проходження встановлює покажчик азимуту вторинного транспортного засобу відносно первинного транспортного засобу. 19. Система за п.11, яка відрізняється тим, що процесор даних оцінює перший час проходження, що включає час проходження між часом передачі на передавачі та часом прийняття на першому транспондері, та другий час проходження, що включає час проходження між часом передачі на 5 91010 6 передавачі та часом прийняття на другому транспондері. 20. Система за п.19, яка відрізняється тим, що додатково включає перетворювач для перетво рення першого часу проходження та другого часу проходження у першу відстань та другу відстань відповідно. [0001 ]Цей винахід відноситься до способу визначення відносного положення рухомих транспортних засобів. [0002] Первинним транспортним засобом може бути транспортний засіб з людиною або без людини. У разі транспортного засобу з людиною, для керування транспортним засобом у його навколишньому середовищі водій використовує свою оцінку ситуації і сприйняття. У разі транспортного засобу без людини, керувати транспортним засобом у його навколишньому середовищі може система керування. Один або більше вторинних транспортних засобів можуть координованим чином відслідковувати шлях первинного транспортного засобу для військових, сільськогосподарських або комерційних цілей. Отже, є потреба підтримувати необхідну ступінь орієнтації і координації у часі між первинним положенням первинного транспортного засобу й вторинними положеннями одного або більше вторинних транспортних засобів. [0003] Первинний трансивер первинного транспортного засобу передає перший сигнал передачі у перший транспондер і другий транспондер, пов'язані із вторинним транспортним засобом. Антена першого транспондера й антена другого транспондера пов'язані з опорними точками вторинного транспортного засобу, рознесеними на певну відстань. При прийнятті першого сигналу передачі перший транспондер передає другий сигнал передачі на перший радіомаяк первинного транспортного засобу й первинний трансивер. Антена первинного трансивера й антена першого радіомаяка пов'язані з опорними точками первинного транспортного засобу, рознесеними на певну відстань. При прийнятті першого сигналу передачі другий транспондер передає третій сигнал передачі на перший радіомаяк й у первинний трансивер. Процесор даних або блок оцінки визначає часи проходження, пов'язані із першим сигналом передачі, другим сигналом передачі та третім сигналом передачі. Процесор даних або блок оцінки оцінює відносне положення первинного транспортного засобу відносно вторинного транспортного засобу, використовуючи опорні точки первинного транспортного засобу, опорні точки вторинного транспортного засобу й визначені часи проходження. [0004] Фіг.1 представляє собою блок-схему одного варіанта здійснення пропонованої системи для визначення відносного положення (й орієнтації) первинного транспортного засобу відносно вторинного транспортного засобу. [0005] Фіг.2 представляє собою блок-схему іншого варіанта здійснення пропонованої системи для визначення відносного положення (й орієнтації) первинного транспортного засобу відносно вторинного транспортного засобу. [0006] Фіг.3 представляє собою ілюстративну схему вигляду зверху вторинного транспортного засобу, що звичайно відслідковує шлях первинного транспортного засобу. [0007] Фіг.4 представляє собою блок-схему послідовності стадій одного варіанта здійснення способу визначення відносного положення (й орієнтації) первинного транспортного засобу відносно вторинного транспортного засобу. [0008] Фіг.5 представляє собою блок-схему послідовності стадій іншого варіанта здійснення способу визначення відносного положення й орієнтації первинного транспортного засобу відносно вторинного транспортного засобу. [0009] Фіг.6 представляє собою блок-схему послідовності стадій ще одного варіанта здійснення способу визначення відносного положення й орієнтації первинного транспортного засобу відносно вторинного транспортного засобу. [0010] Фіг.7 представляє собою блок-схему послідовності стадій ще одного варіанта здійснення способу визначення відносного положення (й орієнтації) первинного транспортного засобу відносно вторинного транспортного засобу. [0011] Фіг.8 представляє собою блок-схему іншого варіанта здійснення системи для визначення відносного положення (й орієнтації) первинного транспортного засобу відносно вторинного транспортного засобу. [0012] Фіг.9 представляє собою ілюстративну схему вигляду зверху вторинного транспортного засобу, що звичайно відслідковує шлях первинного транспортного засобу, відповідно до системи на Фіг.8. [0013] Вживаний у цьому описі термін "транспондер" або "радіомаяк" означає пристрій, який при прийнятті призначеного електромагнітного сигналу випромінює електромагнітний сигнал у відповідь, котрий можна використовувати для виявлення та визначення місцезнаходження первинного транспортного засобу відносно вторинного транспортного засобу. Електромагнітний сигнал у відповідь може представляти собою повторення або ретрансляцію прийнятого призначеного електромагнітного сигналу (наприклад, іншим каналом, з іншою частотою, в інший відрізок часу або кодований сигнал), зміну або модуляцію прийнятого сигналу у смузі частот або з проміжною частотою, або новий створений або 7 модульований електромагнітний сигнал. Хоча радіомаяк або транспондер є переважно активним, в альтернативних варіантах здійснення можуть використовуватися пасивні ретранслятори або пасивні радіомаяки за умови, що ефективна випромінювана потужність передачі й просторовий рознос є відповідними. [0014] Відповідно до одного варіанта здійснення, Фіг.1 ілюструє систему 11, призначену для відслідковування положення (або положення й курсу) первинного транспортного засобу відносно вторинного транспортного засобу. Положення транспортного засобу можна визначати у двоабо тривимірних координатах (наприклад, Декартові координати, полярні координати, широта або довгота). Курс або орієнтація відносяться до миттєвого напрямку руху транспортного засобу. Курс або орієнтацію можна визначати щодо напрямку прямо на північ, магнітну північ, за радіочастотним маяком, небесним маяком або іншою опорною точкою або пеленгом. Оскільки серія положень транспортного засобу встановлює шлях, швидкість і прискорення транспортного засобу, систему 11 можна адаптувати таким чином, що вторинний транспортний засіб відслідковує шлях, швидкість та (або) прискорення первинного транспортного засобу, або навпаки. [0015] Система 11 містить електроніку 10 первинного транспортного засобу й електроніку 26 вторинного транспортного засобу. Електроніка 10 первинного транспортного засобу пов'язана з первинним транспортним засобом, а електроніка 26 вторинного транспортного засобу пов'язана з вторинним транспортним засобом. [0016] Електроніка 10 первинного транспортного засобу містить первинний трансивер 15 і контролер 40 первинного транспортного засобу, що мають зв'язок з процесором даних 16. У свою чергу, контролер 40 первинного транспортного засобу виконаний таким чином, щоб мати зв'язок через тракт логічних даних або тракт фізичних даних (наприклад, шина даних) з однією або кількома наступними системами: із системою кермового керування 42, гальмовою системою 44 та силовою (рушійною) установкою 46. Електроніка 10 первинного транспортного засобу містить також перший радіомаяк 39. Перший радіомаяк 39 є пов'язаний з антеною 87 першого радіомаяка, віднесеною від антени 77 первинного трансивера або антени передавача 14, на відстань відомого первинного просторового розносу 91. Антена 87 першого радіомаяка й антена 77 первинного трансивера пов'язані з опорними точками первинного транспортного засобу (наприклад, у дво- або тривимірних координатах) відносно до первинного транспортного засобу (наприклад, опорна система координат транспортного засобу). [0017] Електроніка 26 вторинного транспортного засобу містить перший транспондер 30 та другий транспондер 34. В одному варіанті здійснення, перший транспондер 30 та другий транспондер 34 кожний містять трансивер 32 або сполучення передавача й приймача. Антена 79 першого транспондера й антена 81 другого транспондера 81 розділені відомим вторинним прос 91010 8 торовим розносом 28. Антена 79 першого транспондера й антена 81 другого транспондера 81 є пов'язані з опорними точками вторинного транспортного засобу (наприклад, у двовимірних або тривимірних координатах) відносно до вторинного транспортного засобу (наприклад, опорна система координат транспортного засобу). Кожний транспондер може вибірково модулювати або кодувати (наприклад, фазова маніпуляція - метод модуляції/демодуляції із використанням двох частот, частотна маніпуляція - метод модуляції/демодуляції із використанням чотирьох частот, або коди псевдовипадкових перешкод) свій передаваний або випромінюваний сигнал, щоб полегшити відрізнення одного сигналу передачі (наприклад, сигнал передачі транспондера) від іншого. [0018] Повертаючись до електроніки 10 первинного транспортного засобу докладніше, перший радіомаяк 39 містить трансивер 32 або сполучення передавача й приймача. Первинний трансивер 15 може містити трансивер або сполучення приймача 12 і передавача 14. Перший радіомаяк 39 і первинний трансивер 15 кожний може вибірково модулювати або кодувати свій передаваний або випромінюваний сигнал, щоб полегшити відрізнення одного сигналів передачі один від одного. В одному варіанті здійснення, процесор даних 16 може містити блок оцінки 18, перетворювач 20 і пристрій керування 21. [0019] Контролер 40 первинного транспортного засобу може видавати керуючі сигнали для системи кермового керування 42, гальмової системи 44 та силової (рушійної) установки 46, що є узгоджені із відслідкуванням плану шляху або необхідного шляху. Наприклад, керуючі сигнали можуть містити керуючий сигнал або інформаційне сповіщення кермового керування, залежне від часу, що визначає кут повороту вала кермового колеса; керуючий сигнал або інформаційне сповіщення щодо гальмування, що визначає величину сповільнення, тиск у гідравлічній системі або гальмове тертя, що прикладається до гальм; керуючий сигнал або інформаційне сповіщення для силової установки, що керує дросельною заслінкою, витратою палива, системою вприскування палива, швидкістю або прискоренням транспортного засобу. Якщо первинний транспортний засіб приводиться до руху електричним приводом або електричним двигуном, керуючий сигнал або інформаційне сповіщення для силової установки може керувати електричною енергією, електричним струмом або електричною напругою, що подаються до електричного привода або двигуна. [0020] Система кермового керування 42 може містити гідравлічну систему кермового керування з електричним керуванням, рейкове кермове керування з електроприводом, систему кермового керування, що використовує принцип Акермана, або іншу систему кермового керування. Гальмова система 44 може містити гідравлічну гальмову систему з електричним керуванням або іншу гальмову систему з електричним керуванням. Силова установка 46 може містити двигун внутрішнього згоряння, гібридну систему з двигуном 9 внутрішнього згоряння та електричним двигуном, систему електроприводу тощо. [0021] В електроніці 10 первинного транспортного засобу 10 перший радіомаяк або первинний трансивер 15 приймає сигнал передачі й видає демодульований або декодований сигнал у процесор даних 16. Процесор даних 16 або блок оцінки 18 оцінює відносне положення або місцезнаходження (або відносне положення й відносний курс) вторинного транспортного засобу відносно первинного транспортного засобу, використовуючи минувший час проходження, пов'язаний із одним або кількома з наступних шляхів поширення між опорними точками (наприклад, співпадаючих з антенами (77, 87, 79 та 81)) на транспортних засобах: (1) вихідний шлях поширення від первинного транспортного засобу до вторинного транспортного засобу, (2) вхідний шлях поширення від вторинного транспортного засобу до первинного транспортного засобу, (3) вихідний шлях поширення від вторинного транспортного засобу до первинного транспортного засобу або (4) вхідний шлях поширення первинного транспортного засобу до вторинного транспортного засобу. [0022] Процесор даних 16 може бути конфігурованим кількома різними способами. У першій конфігурації процесора даних 16 процесор даних 16 може обробляти минувші часи проходження безпосередньо, не перетворюючи їх у відповідні відстані. У разі першої конфігурації перетворювач 20 не використовується, і його можна позбавитися. У другій конфігурації процесора даних 16 використовується перетворювач 20 для перетворення минувших часів проходження у відповідні відстані між опорними точками (наприклад, просторово співпадаючими з антенами (77, 87, 97 та 81)). [0023] У разі використання перетворювача 20 перетворювач 20 може перетворювати кожний минувший час проходження в радіус або відстань за наступною формулою: відстань =c*t, де с=3 108м/с (або швидкість світла), t= минувший час або час проходження, і відстань - це відстань в метрах. У разі використання часу проходження в обидва боки як минувший час між первинною опорною точкою (наприклад, антена 77 первинного трансивера) на первинному транспортному засобі і вторинною опорною точкою (наприклад, антена 79 першого транспондера) на вторинному транспортному засобі, відстань (d) ділиться на два, щоб отримати відстань або радіус між опорними точками. Крім того, для активних транспондерів або активних радіомаяків, може бути віднімання часу або відстані на систематичне відхилення або запізнювання обробки у кожному транспондері, трансивері або радіомаяку. Процесор даних 16 може бути конфігурованим так, щоб (а) використовувати час проходження в один бік від первинного трансивера 15 до першого транспондера 30 і час проходження в один бік від первинного трансивера 15 до другого транспондера 34, або (b) використовувати час проходження в обидва боки від первинного трансивера 15 до першого транспондера 30 або час проходження в 91010 10 обидва боки від первинного трансивера 15 до другого транспондера 34. [0024] Пристрій керування 21 організує часи проходження (або відповідні відстані), що збираються первинним трансивером 15. Часи проходження (або відповідні відстані) можна організовувати за (а) практично співпадаючими або одночасними часами прийняття або передачі, (б) послідовністю часів прийняття або передачі, (в) ідентифікаторами сигналів або за будь-якою ознак, що передують. Зібрані часи проходження можуть помічатися міткою часу для вказування на час збору даних або іншим чином індексуватися до системного годинника або таймера. Крім того, перший сигнал передачі, другий сигнал передачі та третій сигнал передачі можуть однозначно кодуватися, модулюватися або структуруватися іншим чином, щоб однозначно відрізнятися один від одного. Наприклад, перший сигнал передачі, другий сигнал передачі та третій сигнал передачі можуть бути пов'язані і першим ідентифікатором сигналу, другим ідентифікатором сигналу та третім ідентифікатором сигналу відповідно. [0025] Часи проходження можуть відбиратися або збиратися з регулярними інтервалами. Наприклад, в одній конфігурації часи проходження можуть відбиратися або збиратися зі швидкістю, більшою або рівною 5Гц. В іншому виконанні, часи проходження можуть відбиратися або збиратися зі швидкістю 100Гц або більшою. Переважно, швидкість відбору 100Гц або більше є прийнятною для запобігання зіткнення й підтримування необхідного просторового розділення між первинним транспортним засобом і вторинним транспортним засобом. [0026] Зібрані часи проходження можуть включати перший час проходження, другий час проходження, третій час проходження і четвертий час проходження. Перший час проходження - це запізнювання, пов'язане з поширенням електромагнітного сигналу між первинним трансивером 15 (наприклад, між антеною 77 первинного трансивера) та першим транспондером 30 (наприклад, антеною 79 першого транспондера), а другий час проходження – це запізнювання, пов'язане з поширенням електромагнітного сигналу між первинним трансивером 15 (наприклад, між антеною 77 первинного трансивера) та другим транспондером 34 (наприклад, антеною 81 другого транспондера). [0027] Перший час проходження звичайно є пропорційний першій відстані між антеною 79 першого транспондера й антеною 77 первинного трансивера; другий час проходження звичайно є пропорційний другій відстані між антеною 81 другого транспондера й антеною 77 первинного трансивера. Перший час проходження й другий час проходження встановлюють перший радіус (або є пропорційні радіусу) первинного транспортного засобу відносно вторинного транспортного засобу. Наприклад, вторинний транспортний засіб міг би потенційно знаходитися у будь-якому місці в границях першого радіусу (наприклад, як визначений вище) навколо антени 77 первинного тран 11 сивера, причому перший радіус розрізає пополам антену 79 першого транспондера й антену 81 другого транспондера. Третій час проходження, четвертий час проходження або обидва можна використовувати для вирішення неясності щодо того, де знаходиться вторинний транспортний засіб відносно першого радіусу. Однак для того, щоб визначити, знаходиться вторинний транспортний засіб праворуч або ліворуч транспортного засобу або має інше відповідне положення, може знадобитися додаткова інформація (наприклад, дані приймача щодо визначення місцезнаходження, відеоінформація машини, оптичні дані або далекомір). [0028] В альтернативному варіанті здійснення вихідний сигнал оптичного або лазерного далекоміра подається до процесора даних 16 для вирішення будь-якої неясності, що залишилася, щодо відносних положень первинного транспортного засобу та вторинного транспортного засобу. [0029] Система 111 на Фіг.2 є схожа до системи 11 на Фіг.1, за винятком того, що система на Фіг.2 включає додаткові компоненти, пов'язані з електронікою 110 первинного транспортного засобу й електронікою 126 вторинного транспортного засобу 126. Додаткові компоненти електроніки 110 первинного транспортного засобу включають перший пристрій бездротового зв'язку 24 і зв'язковий інтерфейс 38. Додаткові компоненти електроніки 126 вторинного транспортного засобу включають другий пристрій бездротового зв'язку 36, керуючий інтерфейс 38, контролер 41 вторинного транспортного засобу, систему кермового керування 42, гальмову систему 44 і силову установку 46. Однаковими позиціями на Фіг.1 та Фіг.2 вказані подібні елементи. [0030] Зв'язковий інтерфейс 38 підтримує зв'язок одних або кількох з наступних даних: дані часової синхронізації, дані про відстань, часові дані, дані про відносне положення й дані про відносний курс. Зв'язковий інтерфейс 38 забезпечує зв'язок будь-яких із вказаних вище даних з електронікою 126 вторинного транспортного засобу 24 та другий пристрій бездротового зв'язку 36, що пов'язані із первинним транспортним засобом та вторинним транспортним засобом відповідно. У разі даних про відносне положення йдеться про положення первинного транспортного засобу відносно до вторинного транспортного засобу, котре можне відноситися до однієї або кількох опорних точок, що є пов'язані із транспортним засобом. У разі даних про курс йдеться про відносний курс (наприклад, азимутальний або кутовий курс) первинного транспортного засобу відносно вторинного транспортного засобу. Дані часової синхронізації можуть використовуватися для координування системного годинника або генераторів (наприклад, точний гетеродин або генератори на кристалах рубідію) для забезпечення точних часових вимірювань часів передачі й часів прийняття електромагнітних сигналів між первинним транспортним засобом і другим транспортним засобом. [0031] Електроніка 110 первинного транспортного засобу може обмінюватися даними про 91010 12 положення (наприклад, даними про положення, даними про курс або даними про орієнтацію) в один бік або обидва боки з електронікою 126 вторинного транспортного засобу 126 через канал зв'язку, встановлений між першим пристроєм бездротового зв'язку 24 та другим пристроєм бездротового зв'язку 36. Дані про положення можуть стосуватися пеленгу, курсу, положення, координат, шляху, швидкості, прискорення або іншого вказування положення первинного транспортного засобу, вторинного транспортного засобу або обох. Крім того, дані про положення можуть містити відносний пеленг, відносний курс, відносні координати, відносну швидкість, відносне прискорення або інший покажчик відносного положення щодо первинного транспортного засобу та вторинного транспортного засобу. [0032] Другий пристрій бездротового зв'язку 36 є з'єднаний з керуючим інтерфейсом 38. У свою чергу, керуючий інтерфейс 38 є з'єднаний з контролером 41 вторинного транспортного засобу. Контролер 41 вторинного транспортного засобу може посилати керуючі сигнали в один або кілька вторинних пристроїв через тракт логічних даних або тракт фізичних даних (наприклад, шина даних): в систему кермового керування 42, гальмову систему 44 та силову установку 46. В електроніці 126 вторинного транспортного засобу керуючий інтерфейс 38 приймає дані про відстань, часові дані або дані про відносне положення й видає їх в контролер 41 вторинного транспортного засобу. [0033] В одній конфігурації контролер 41 вторинного транспортного засобу може видавати керуючі сигнали для системи кермового керування 42, гальмової системи 44 та силової установки 46, що є узгоджені із відслідковуванням плану шляху або відслідковуванням первинного положення та первинного курсу транспортного засобу. Наприклад, керуючі сигнали можуть містити керуючий сигнал або інформаційне сповіщення кермового керування, залежне від часу, що визначає кут повороту вала кермового колеса; керуючий сигнал або інформаційне сповіщення щодо гальмування, що визначає величину сповільнення, тиск у гідравлічній системі або гальмове тертя, що прикладається до гальм; керуючий сигнал або інформаційне сповіщення для силової установки, що керує дросельною заслінкою, витратою палива, системою вприскування палива, швидкістю або прискоренням транспортного засобу. Якщо транспортний засіб приводиться до руху електричним приводом або електричним двигуном, керуючий сигнал або інформаційне сповіщення для силової установки може керувати електричною енергією, електричним струмом або електричною напругою, що подаються до електричного привода або двигуна. [0034] В іншій конфігурації контролер 41 вторинного транспортного засобу може видати команду транспортному засобу підтримувати безпечну або однакову відстань та (або) курс від первинного транспортного засобу або відслідковувати шлях первинного транспортного засобу. Наприклад, контролер 41 транспортного засобу 13 може видати команду системі кермового керування 42 відслідковувати шлях первинного транспортного засобу, а силовій установці 46 відслідковувати прискорення або швидкість первинного транспортного засобу. [0035] В одному варіанті здійснення, вторинний транспортний засіб може відслідковувати первинне положення і первинний курс первинного транспортного засобу із мінімальним часом запізнювання для обробки даних та її керування. Хоча первинний транспортний засіб може розглядатися як направляючий транспортний засіб, а вторинний транспортний засіб може розглядатися як транспортний засіб що слідує або замикаючий, вторинний транспортний засіб може відслідковувати первинний транспортний засіб, знаходячись поруч, або навпаки. [0036] Фіг.3 представляє собою вигляд зверху й представлення як блок-схема первинного транспортного засобу 301 та вторинного транспортного засобу 303. Хоча антени (77, 79, 81, 87) можуть розміщатися інакше, ніж показано, і ще й досі бути у границях обсягу винаходу, як показано на Фіг.3, первинний транспортний засіб 301 включає антену 77 первинного трансивера, що є змонтована спереду відносно антени 87 першого радіомаяка 87; вторинний транспортний засіб 303 включає антену 79 першого транспондера, що є змонтована спереду відносно антени 81 другого транспондера. Антена 77 первинного трансивера 77 і антена 87 першого радіомаяка знаходяться у первинних опорних точках на первинному транспортному засобі 301. Антена 79 першого транспондера й антена 81 другого транспондера 81 знаходяться у вторинних опорних точках на вторинному транспортному засобі 303. [0037] Первинний трансивер 15 передає перший сигнал передачі (наприклад, імпульс або пачку імпульсів з першим ідентифікатором сигналу) у перший транспондер 30 та другий транспондер 34. Як показано, перший транспондер 30 передає сигнал у відповідь (наприклад, імпульс або пачку імпульсів другого сигналу передачі з другим ідентифікатором сигналу) у первинний трансивер 15, а другий транспондер 34 передає інший сигнал у відповідь (наприклад, імпульс або пачку імпульсів третього сигналу передачі з третім ідентифікатором сигналу) у первинний трансивер 15. Перший час проходження 302 є пов'язаний з проходженням в один бік або в обидва боки між первинним трансивером 15 та першим транспондером 30. Другий час проходження 304 є пов'язаний з проходженням в один бік або в обидва боки між первинним трансивером 15 та другим транспондером 34. Перша відстань, що є пропорційна першому часу проходження 302, представляє відстань між антеною 77 первинного трансивера та антеною 79 першого транспондера. Друга відстань, що є пропорційна другому часу проходження 304, представляє відстань між антеною 77 первинного трансивера та антеною 81 другого транспондера. [0038] При прийнятті першого сигналу передачі перший транспондер 30 передає другий сигнал передачі (наприклад, імпульс з другим іден 91010 14 тифікатором сигналу) у первинний трансивер 15 та на перший радіомаяк 39; другий транспондер 34 передає третій сигнал передачі (наприклад, імпульс з третім ідентифікатором сигналу) у первинний трансивер 15 та на перший радіомаяк 39. Третій час проходження 306 є пов'язаний з (а) проходженням в один бік між первинним трансивером 15 та першим радіомаяком 39 через перший транспондер 30 або (б) проходженням в один бік між першим транспондером 30 та першим радіомаяком 39. Третя відстань є пропорційна третьому часу проходження 306. Четвертий час проходження 308 є пов'язаний з (а) проходженням в один бік між первинним трансивером 15 та першим радіомаяком 39 через другий транспондер 34 або (б) проходженням в один бік між другим транспондером 34 та першим радіомаяком 39. Четверта відстань є пропорційна четвертому часу проходження 308. [0039] Первинний трансивер 15 та перший радіомаяк 39 можуть зв'язуватися між собою бездротовим зв'язком або через лінію передачі, оптоволоконний кабель, коаксіальний кабель, канал мережі Ethernet або іншу конфігурацію. Запізнювання поширення, пов'язане з лінією передачі, можна виміряти або попередньо визначити для даної довжини лінії передачі між первинним трансивером 15 та першим радіомаяком 39, щоб компенсувати запізнювання у зв'язку або обробці. В одному варіанті здійснення перший радіомаяк 39 може передавати у первинний трансивер 15 одне або кілька з наступного: (1) час передачі, що минув для передачі з передавача 14 сигналу передачі (наприклад, імпульсу) з конкретним відповідним ідентифікатором сигналу, (2) час прийняття на першому радіомаяку 39 для прийняття передач сигналу передачі з конкретним відповідним ідентифікатором сигналу, (3) як час передачі з первинного трансивера 15 та час прийняття на першому радіомаяку та (4) різниця між часом передачі та часом прийняття на першому радіомаяку 39. Електроніка (10 або 110) первинного транспортного засобу та електроніка (26 або 126) вторинного транспортного засобу може зажадати точних генераторів або годинників, що є синхронізовані з даними обміну або синхронізації, для належної оцінки та прийняття рішення щодо вищезазначених часу передачі, часу прийняття, різниці часу та будь-якого іншого часу проходження між електронікою 26 вторинного транспортного засобу та електронікою 10 первинного транспортного засобу. [0040] Первинний транспортний засіб 301 має первинний курс 331, а вторинний транспортний засіб має вторинний курс 333. Різниця або диференціальний кут (а) між первинним курсом та вторинним курсом може містити сигнал похибки або інформацію про похибку, що використовується для направлення первинного транспортного засобу, вторинного транспортного засобу або обох. Крім того, кожний транспортний засіб може мати (1) абсолютне положення та абсолютний курс або (2) відносне положення та відносний курс відносно другого транспортного засобу. Абсолютне положення або відносне положення може 15 визначатися відносно опорної точки на транспортному засобі (наприклад, геометричний центр або центр ваги або положення антен (77, 79, 87 та 81). Абсолютний або відносний курс може визначатися відносно опорного курсу або опорного пеленгу (наприклад, прямо на північ або магнітний північ). [0041] Фіг.4 ілюструє спосіб визначення відносного положення та орієнтації первинного транспортного засобу відносно вторинного транспортного засобу. Спосіб на Фіг.4 починають зі стадії S100. [0042] На стадії S100 первинний трансивер 15 або передавачем передає перший сигнал передачі з первинного транспортного засобу у перший транспондер 30 та другий транспондер 34, що є пов'язані з вторинним транспортним засобом. Перша передача може містити ідентифіковний імпульс та може кодуватися першим ідентифікатором сигналу для вказування на його джерело, його призначення або обидва. Перший сигнал передачі може бути модульованим кодовим сигналом (наприклад, код псевдовипадкових перешкод), імпульсом, пачкою імпульсів, фазовою маніпуляцією, амплітудною маніпуляцією, частотною маніпуляцією, широтно-імпульсною модуляцією, амплітудноімпульсною модуляцією, фазово-імпульсною модуляцією або будь-якою іншою прийнятною схемою модуляції. Антена 79 першого транспондера та антена 81 другого транспондера є пов'язані з опорними точками вторинного транспортного засобу (наприклад, з двовимірними або тривимірними просторовими координатами на вторинному транспортному засобі), рознесеними на певну відстань. [0043] На стадії S102 перший транспондер 30 вторинного транспортного засобу передає другий сигнал передачі з першого транспондера 30 вторинного транспортного засобу на перший радіомаяк 39 первинного транспортного засобу та первинний трансивер 15. Наприклад, при прийнятті першого сигналу передачі першим транспондером ЗО передають другий сигнал передачі з другим ідентифікатором сигналу на перший радіомаяк 39 первинного транспортного засобу та первинний трансивер 15. Антена 77 первинного трансивера та антена 87 першого радіомаяка 87 є пов'язані з опорними точками первинного транспортного засобу, рознесеними на певну відстань. [0044] На стадії S104 другий транспондер 34 вторинного транспортного засобу передає третій сигнал передачі з другого транспондера 34 вторинного транспортного засобу на перший радіомаяк 39 первинного транспортного засобу та у первинний трансивер 15. Наприклад, при прийнятті першого сигналу передачі, другий транспондер 34 передає третій сигнал передачі з третім ідентифікатором сигналу на перший радіомаяк 39. [0045] На стадії S106 процесор даних визначає відповідні часи проходження, пов'язані з першим сигналом передачі, другим сигналом передачі та третім сигналом передачі. Наприклад, процесор даних або блок оцінки визначає (1) пе 91010 16 рший час проходження, пов'язаний з першим сигналом передачі між антеною 77 первинного трансивера та антеною 79 першого транспондера, (2) другий час проходження, пов'язаний з першим сигналом передачі між антеною 77 первинного трансивера та антеною 81 другого транспондера; (3) третій час проходження, пов'язаний з другим сигналом передачі між першим транспондером 30 та першим радіомаяком 39; (4) четвертий час проходження, пов'язаний з третім сигналом передачі між другим транспондером 34 та первинним трансивером 15. [0046] Перший час проходження може містити час проходження в обидва боки, що включає вихідний час проходження між первинним трансивером 15 та першим транспондером 30 та вхідний час проходження між першим транспондером 30 та первинним трансивером 15. Аналогічно, другий час проходження може містити час проходження в обидва боки, що включає вихідний час проходження між первинним трансивером 15 та другим транспондером 34 та вхідний час проходження між другим транспондером 34 та первинним трансивером 15. Наприклад, перший час проходження містить час проходження між часом передачі на передавачі та часом прийняття на першому транспондері 30, а другий час проходження містить час проходження між часом передачі на передавачі та часом прийняття на другому транспондері 34. [0047] На стадії S108 блок оцінки 18 оцінює відносне положення первинного транспортного засобу відносно вторинного транспортного засобу, використовуючи опорні точки первинного транспортного засобу, опорні точки вторинного транспортного засобу та визначені часи проходження. Наприклад, процесор даних (16 або 116) або блок оцінки 18 оцінює відносне положення первинного транспортного засобу відносно вторинного транспортного засобу, використовуючи опорні точки первинного транспортного засобу, опорні точки вторинного транспортного засобу, визначений перший час проходження, другий час проходження та принаймні один з третього часу проходження та четвертого часу проходження. [0048] У деяких випадках застосування первинний транспортний засіб і вторинний транспортний засіб можуть рухатися у відносно безпосередній близькості. Безпосередньою близькістю можуть бути лише 20 сантиметрів розділення для транспортних засобів, що рухаються з нижчими швидкостями, та аж 10 метрів розділення для транспортних засобів, що рухаються з вищими швидкостями. Для того щоб безпечно виявити та запобігти зіткнень, результати вимірювання відносного положення та орієнтації типово збирають з регулярними (наприклад, періодичними) інтервалами часу з достатньо високою частотою (наприклад, з вищою або рівною 100Гц). Ця висока частота може перевищувати максимальну частоту типового приймача системи визначення місцезнаходження (наприклад, приймача глобальної системи визначення місцезнаходження з диференційною поправкою). 17 [0049] Спосіб на Фіг.5 є схожий до способу на Фіг.4 за винятком того, що спосіб на Фіг.5 включає ще стадію S110. Однаковими позиціями на Фіг.4 та Фіг.5 вказані схожі елементи або схожі операції. [0050] На стадії S110 після стадії S108 контролер транспортного засобу (наприклад, контролер вторинного транспортного засобу) керує вторинним курсом вторинного транспортного засобу, щоб відслідковувати первинний курс первинного транспортного засобу. Відповідно, якщо первинний транспортний засіб та вторинний транспортний засіб просторово знаходитимуться поруч, первинний транспортний засіб та вторинний транспортний засіб не зіткнуться й не перетинатимуть шлях один одному, якщо швидкість транспортних засобів, кутова швидкість, прискорення та курс транспортних засобів будуть приблизно такими самими або у границях певного максимального допуску, що базуватиметься на просторовому розділенні між первинним транспортним засобом та вторинним транспортним засобом (наприклад, відносно однієї або кількох опорних точок на кожному транспортному засобі). [0051] Стадія S110 може доповнюватися різними операціями, що можуть здійснюватися окремо або сукупно. У додаток до керування відносними курсами транспортних засобів, керування положеннями й орієнтаціями транспортних засобів може включати наступні додаткові операції. У першій операції контролер 40 первинного транспортного засобу, контролер 41 вторинного транспортного засобу або обидва керують боковим розділенням між первинним транспортним засобом та вторинним транспортним засобом, щоб забезпечити або перевищити мінімальне бокове просторове розділення (наприклад, 20 сантиметрів). [0052] У другій операції процесор даних (16 або 116) оцінює відносні положення та кутовий курс первинного транспортного засобу та вторинного транспортного засобу з частотою поновлення принаймні 100Гц, щоб сприяти запобіганню зіткненню між первинним транспортним засобом та вторинним транспортним засобом. [0053] У третій операції контролер 40 первинного транспортного засобу та контролер 41 вторинного транспортного засобу можуть співдіяти, щоб вказати вторинному транспортному засобу слідувати за первинним транспортним засобом під час першого режиму й вказати первинному транспортному засобу слідувати за вторинним транспортним засобом під час другого режиму. Перехід з першого режиму на другий може ініціюватися подією, пов'язаною з відмовою, надійністю або ушкодженням деякого компонента (наприклад, вихідний сигнал або дані датчика транспортного засобу) на первинному транспортному засобі або вторинному транспортному засобі. Наприклад, якщо на первинному транспортному засобі вийшов з ладу критичний компонент, і транспортні засоби рухаються у першому режимі, контролер 40 первинного транспортного засобу може передати сигнал у контролер 41 вторинного транспортного засобу на переключення на 91010 18 другий режим через перший бездротовий пристрій зв'язку 24 та другий бездротовий пристрій зв'язку 36. [0054] Спосіб на Фіг.6 є схожий до способу на Фіг.4 за винятком того, що операції S106 та S108 є замінені операціями S107 та S109 на Фіг.6. Однаковими позиціями на Фіг.4 та Фіг.6 вказані схожі елементи або схожі операції. [0055] На стадії S107 після стадії S104 процесор даних (16 або 116) визначає перший час проходження, другий час проходження та третій час проходження, використовуючи перший сигнал передачі, другий сигнал передачі та третій сигнал передачі. [0056] На стадії S109 процесор даних (16 або 116) або блок оцінки 18 оцінює відносне положення первинного транспортного засобу відносно вторинного транспортного засобу, використовуючи опорні точки первинного транспортного засобу, опорні точки вторинного транспортного засобу та визначені перший час проходження, другий час проходження та третій час проходження. [0057] Спосіб на Фіг.7 є схожий до способу на Фіг.4 за винятком того, що операції S106 тa S108e замінені операціями S111 тa S113 нa Фіг.7. Однаковими позиціями на Фіг.4 та Фіг.7 вказані схожі елементи або схожі операції. [0058] На стадії S111 після стадії S104 процесор даних (16 або 116) визначає перший час проходження, другий час проходження, третій час проходження та четвертий час проходження, використовуючи перший сигнал передачі, другий сигнал передачі та третій сигнал передачі. [0059] На стадії S113 процесор даних (16 або 116) або блок оцінки 18 оцінює а відносне положення первинного транспортного засобу відносно вторинного транспортного засобу, використовуючи опорні точки первинного транспортного засобу, опорні точки вторинного транспортного засобу, перший час проходження, другий час проходження, третій час проходження та четвертий час проходження. [0060] Система 211 на Фіг.8 є схожа до системи 111 на Фіг.2 за винятком того, що первинна електроніка 210 містить ще другий радіомаяк 49, а вторинна електроніка 226 включає різні компоненти. Однаковими позиціями на Фіг.2 та Фіг.8 вказані схожі елементи. [0061] Другий радіомаяк 49 містить трансивер 32 або сполучення передавача й приймача. Антена 87 першого радіомаяка й антена 89 другого радіомаяка розділені відомим вторинним просторовим розносом 93. [0062] Електроніка 226 вторинного транспортного засобу містить перший транспондер 30, другий транспондер 34, вторинний трансивер 88 та процесор даних 116. Перший транспондер 30 та другий транспондер 34 кожний включає трансивер 32, з'єднаний з процесором даних 116. [0063] Вторинний трансивер 88 містить приймач 12 та передавач 14. Вторинний трансивер 88 виконує роль, схожу до ролі первинного трансивера 15, але призначений як вторинний трансивер 88, оскільки він знаходиться на вторинному транспортному засобі або пов'язаний із ним. 19 Складений час проходження між будь-якими трьома антенами можна визначити через розкладення складеного часу проходження на два складових часи проходження між трьома антенами з належним урахуванням будь-якого систематичного відхилення або запізнювання в обробці у будьякому проміжному радіомаяку або транспондері. [0064] Процесор даних 116 містить блок оцінки 18, перетворювач 20, зв'язковий інтерфейс 38 та пристрій керування 21. Наявність процесора даних 116 на первинному транспортному засобі та вторинному транспортному засобі допомагає оцінити часи проходження в один бік або часи проходження в обидва боки на будь-якому транспортному засобі або на обох. Перший пристрій бездротового зв'язку 24 та другий пристрій бездротового зв'язку 36 можуть обмінюватися будьякими з наступних даних: (а) даними часової синхронізації, (б) даними, що сприяють оцінці часу проходження в один бік між електронікою 210 первинного транспортного засобу та електронікою 226 вторинного транспортного засобу, та (в) часи проходження в один бік або часи проходження в обидва боки між будь-якими двома антенами (77, 87, 89, 79 та 81) первинного транспортного засобу або вторинного транспортного засобу. [0065] Процесор даних 116 на первинному транспортному засобі та вторинному транспортному засобі дозволяють будь-якому транспортному засобу визначати своє відносне положення відносно другого транспортного засобу або свій відносний курс відносно другого транспортного засобу. Крім того, як електроніка 210 первинного транспортного засобу, так й електроніка 226 вторинного транспортного засобу на ФІГ.8 дозволяють будь-якому транспортного засобу бути ведучим транспортним засобом або веденим транспортним засобом через здійснення додаткових операцій стадії S110 на Фіг.5 або іншим чином. Ведучий транспортний засіб й ведений транспортний засіб можуть час від часу обмінюватися ролями - через певний період часу або пісня виникнення події, що ініціює (наприклад, датчик транспортного засобу вказує на ушко 91010 20 дження ведучого транспортного засобу, або під час військових операцій потрібен маневр ухилення, або в іншій обстановці потрібен маневр уникнення перешкоди). [0066] У процесорі даних 116 на кожному транспортному засобі перетворювач 20 може перетворювати запізнювання першого поширення та запізнювання другого поширення у першу відстань та другу відстань відповідно для подальшої обробки в керуючі дані. Пристрій керування 21 може використовувати часові дані або дані про відстань для розробки керуючих даних для контролера 41 вторинного транспортного засобу. [0067] Схема на Фіг.9 є схожа до схеми на Фіг.3 за винятком того, що схема на Фіг.9 відноситься до системи 211 на Фіг.8. Однаковими позиціями на фіг.3, Фіг.8 та Фіг.9 вказані схожі елементи. [0068] Первинний транспортний засіб 801 на Фіг.9 включає другий радіомаяк 49 й антену 89 другого радіомаяка. Вторинний транспортний засіб 803 включає вторинний трансивер 88 й антену 95 вторинного трансивера. Другий радіомаяк 49 та вторинний трансивер 88 дозволяють вторинному транспортному засобу 803 обмінюватися ролями з первинним транспортним засобом 801. [0069] Як показано на Фіг.9 первинний транспортний засіб 801 та вторинний транспортний засіб 803 рухаються в першому режимі, у якому вторинний транспортний засіб 803 слідує за первинним транспортним засобом 801. Однак, якщо транспортні засоби рухаються у другому режимі, первинний транспортний засіб 801 слідує за вторинним транспортним засобом 803. У другому режимі другий трансивер 88 бере на себе роль, аналогічну ролі первинного трансивера 88 у першому режимі; а перший радіомаяк 39 та другий радіомаяк 49 беруть на себе ролі, аналогічні ролям першого транспондера 30 та другого транспондера 34 у першому режимі відповідно. [0070] Хоча вище описаний лише переважний варіант здійснення, ясно, що можливі різні варіанти у границях обсягу винаходу, що є визначений доданою формулою винаходу. 21 91010 22 23 91010 24 25 91010 26 27 91010 28 29 91010 30 31 Комп’ютерна верстка Т. Чепелева 91010 Підписне 32 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDetermination method with regard to position of movable vehicles and system to realize it
Автори англійськоюRekow, Andrew K, Stephens, Scott A
Назва патенту російськоюСпособ определения относительного положения подвижных транспортных средств и система для его осуществления
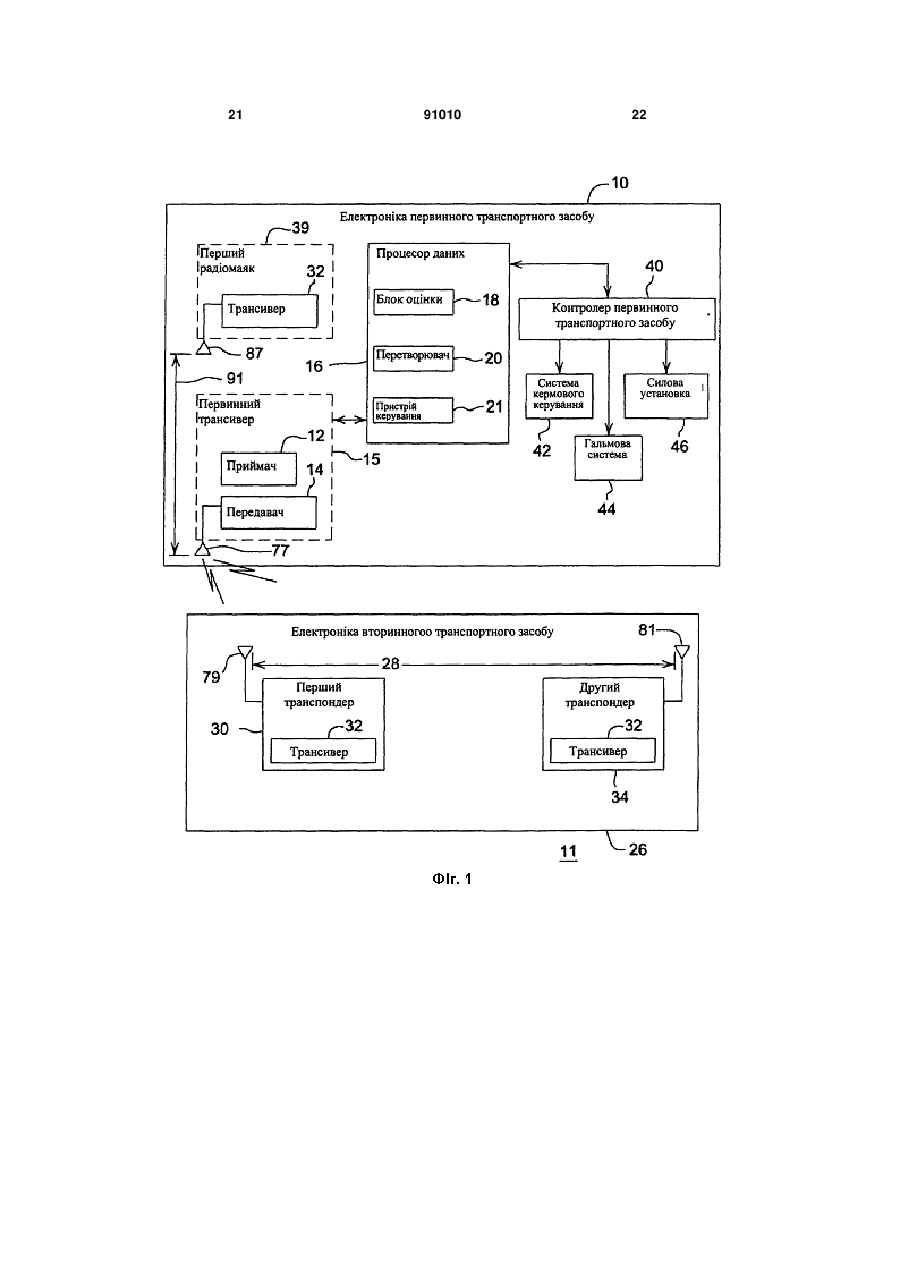
Автори російськоюРеков Ендрю К, Стефенс Скотт А
МПК / Мітки
Мітки: рухомих, засобів, визначення, система, спосіб, положення, транспортних, здійснення, відносного
Код посилання
<a href="https://ua.patents.su/16-91010-sposib-viznachennya-vidnosnogo-polozhennya-rukhomikh-transportnikh-zasobiv-i-sistema-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення відносного положення рухомих транспортних засобів і система для його здійснення</a>
Спосіб охорони транспортних засобів та система для його здійснення
Номер патенту: 72983
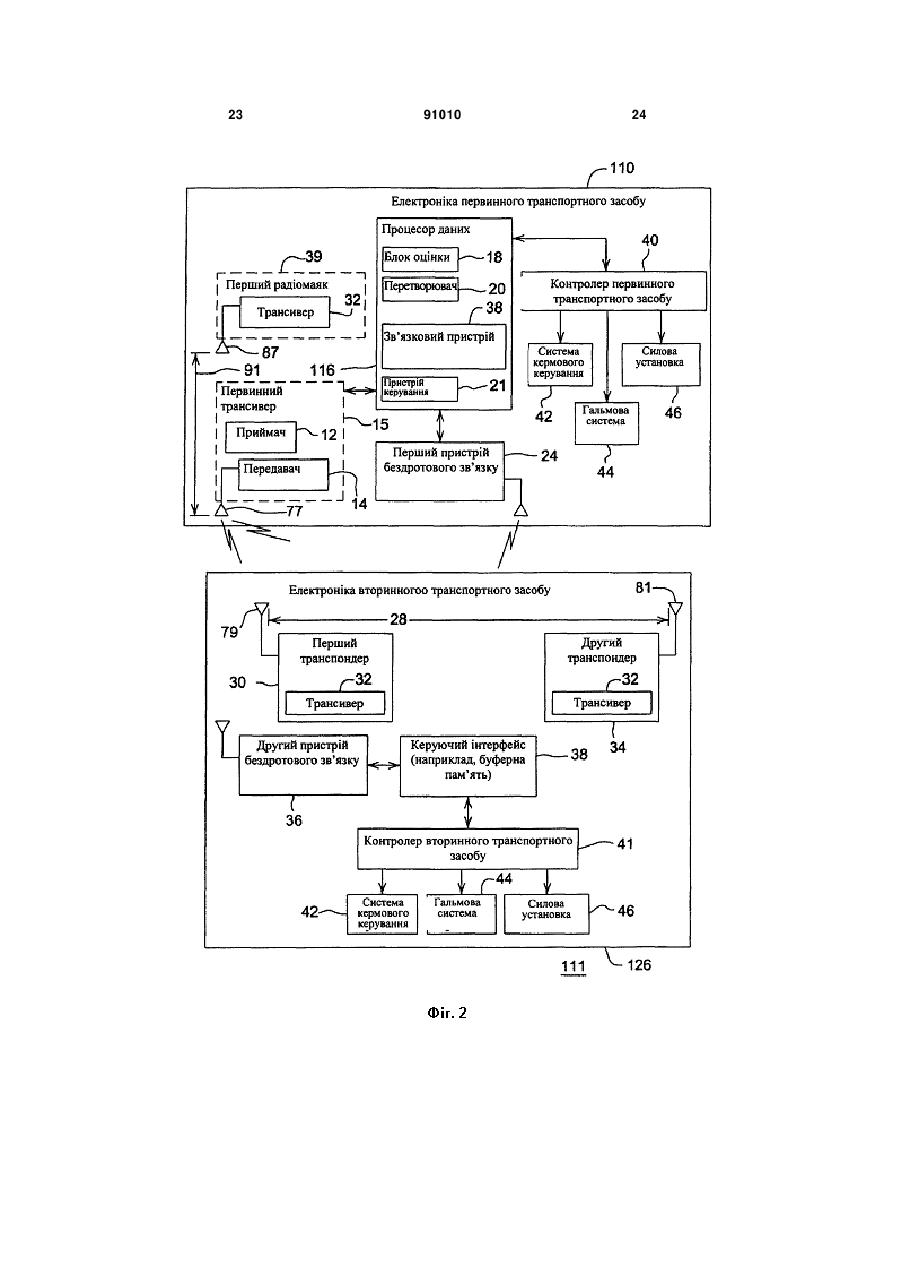
Опубліковано: 16.05.2005
Автор: Купрієнко Олександр Михайлович
МПК: B60R 25/10, B60R 25/04, B60R 25/00
Мітки: система, транспортних, здійснення, засобів, охорони, спосіб
Формула / Реферат:
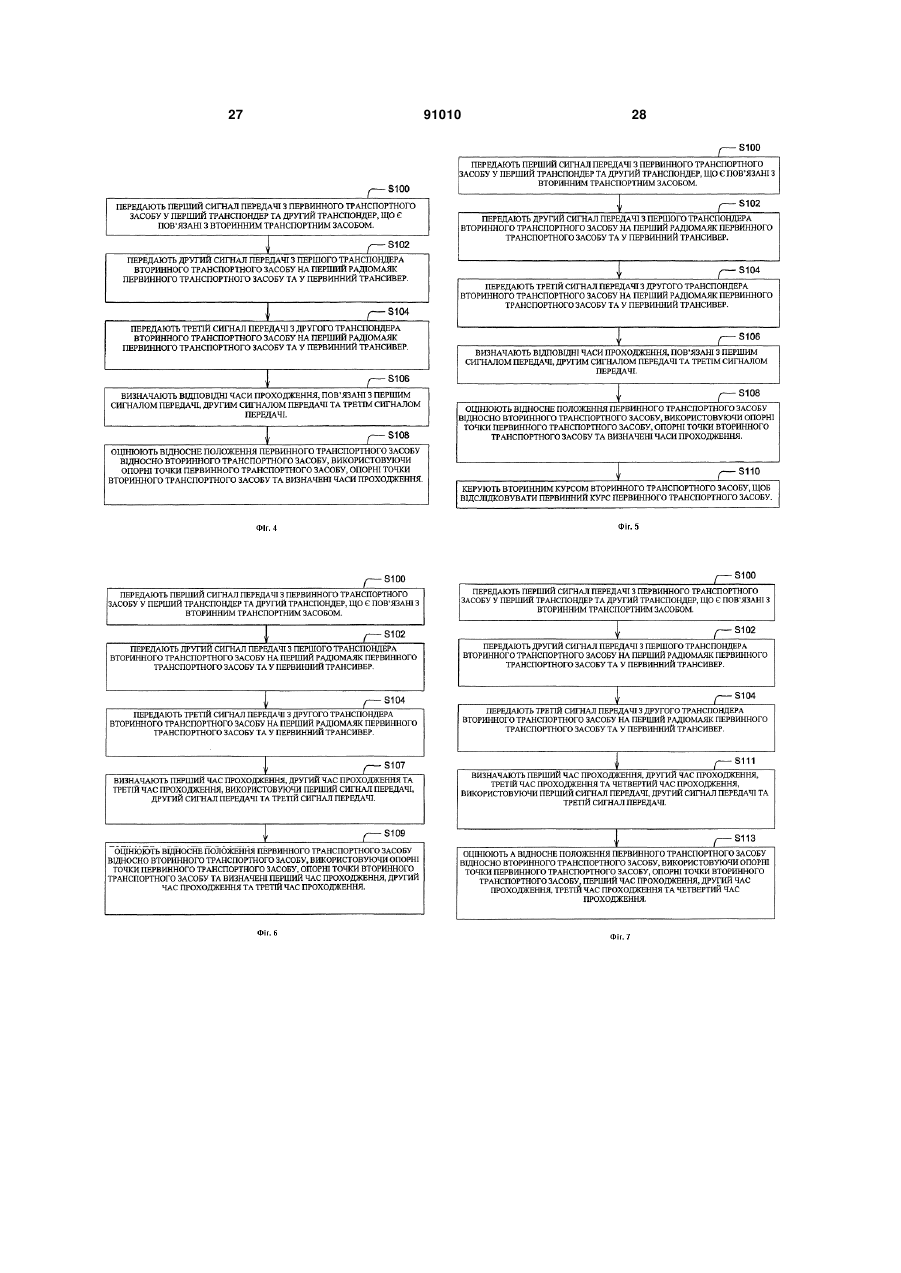
1. Спосіб охорони транспортного засобу, при якому управління вузлами транспортного засобу забезпечує охоронна система, який відрізняється тим, що управління режимами роботи охоронної системи здійснюють шляхом подання команд із задавальних пристроїв на пристрій керування, причому задавальні пристрої виконують з можливістю подання команд в дистанційному і (або) локальному режимах, а пристрій керування на підставі отриманих команд формує сигнали...
Спосіб регулювання тиску повітря в шинах транспортних засобів і система для його здійснення
Номер патенту: 56000
Опубліковано: 15.04.2003
Автори: Хитренко Ярослав Васильович, Мальнов Сергій Іванович, Гутий Андрій Володимирович, Козлинський Мирослав Петрович, Костюк Володимир Володимирович
МПК: B60C 23/00
Мітки: повітря, засобів, спосіб, шинах, здійснення, транспортних, тиску, система, регулювання
Формула / Реферат:
1. Спосіб регулювання тиску повітря в шинах транспортних засобів (т. з.), який включає накачування повітря в ресивер, перекачування його в шини з одночасним визначенням величини тиску повітря в шинах і визначенням навантаження на т. з., який відрізняється тим, що визначають значення рекомендованого тиску повітря в шинах в залежності від навантаження на кожне колесо т. з., визначають реальний тиск повітря в кожній шині т. з. і тим самим...
Спосіб визначення відносного положення та природної відносної траєкторії другого зближуваного космічного апарата щодо першого та пристрій для його здійснення
Номер патенту: 27739
Опубліковано: 16.10.2000
Автор: Ферро Данієль
МПК: B64G 1/24
Мітки: визначення, зближуваного, другого, космічного, спосіб, відносної, апарата, першого, траєкторії, положення, пристрій, природної, відносного, здійснення
Текст:
...если указанный первый сближающийся космический аппарат имеет значительный и известный горизонтальный размах L, измеряют соответственно значение S1 или S2 места начала указанной системы отсчета, связанной с первым сближающимся космическим аппаратом, относительно указанной точки отсчета (О), связанной со вторым сближающимся космическим аппаратом, в каждый из моментов времени t1 и 12, измеряют в каждый из моментов времени t1 и 12,...
Спосіб визначення положення центра ваги колісного транспортного засобу у вертикальній площині і пристрій для його здійснення
Номер патенту: 19834
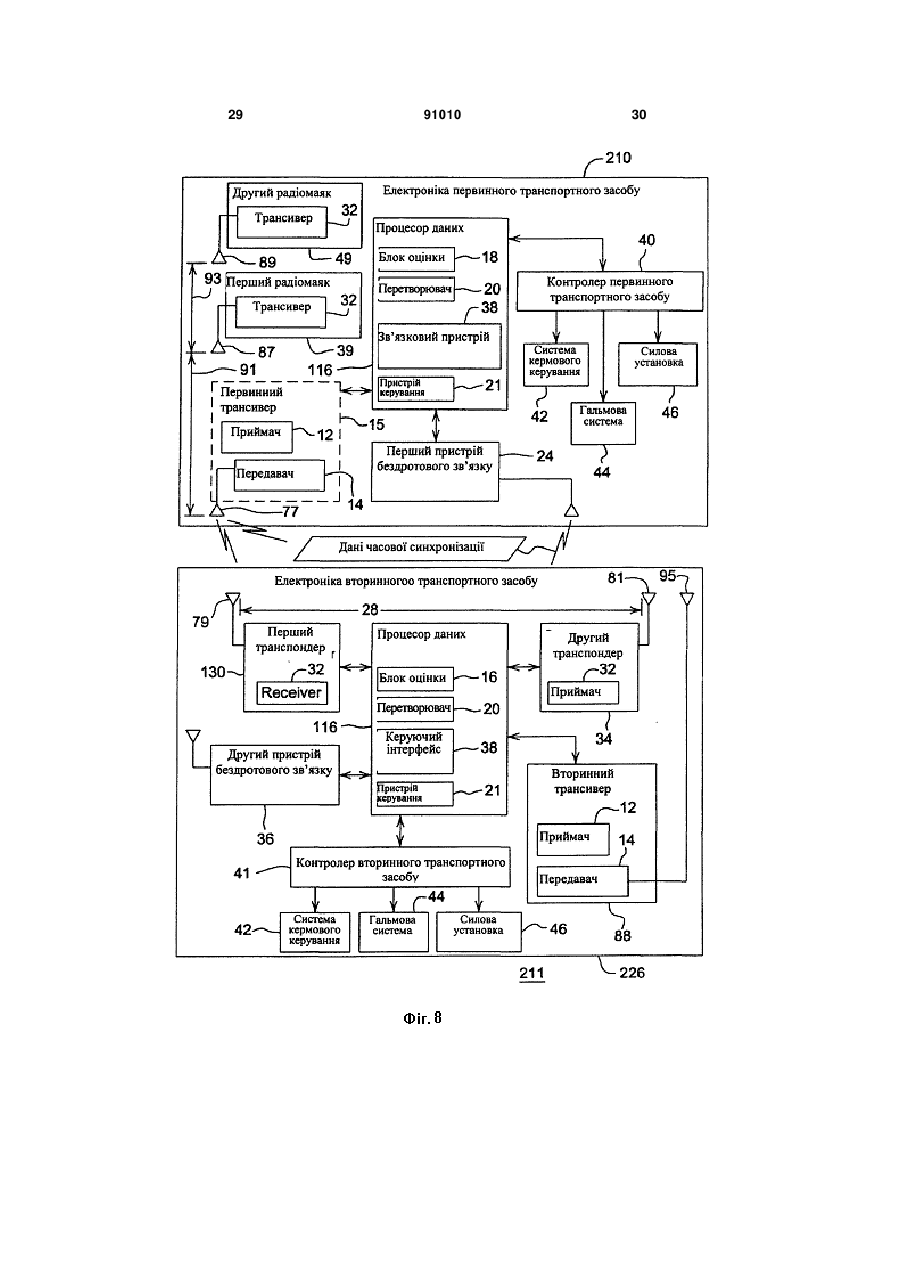
Опубліковано: 15.01.2007
Автори: Козлинський Мирослав Петрович, Денис Василь Володимирович
МПК: B60C 23/00
Мітки: колісного, визначення, центра, спосіб, транспортного, ваги, пристрій, вертикальний, здійснення, положення, засобу, площині
Формула / Реферат:
Спосіб визначення положення центра ваги колісного транспортного засобу у вертикальній площині, що включає визначення тиску повітря в кожній шині коліс, його порівняння з розрахунковим, який відрізняється тим, що визначають зміну тиску повітря в кожній шині коліс при прямолінійному русі під час гальмування колісного транспортного засобу, визначають величини вертикальних і горизонтальних навантажень на кожне із коліс, за якими визначають...
Спосіб визначення положення центра ваги колісного транспортного засобу і пристрій для його здійснення
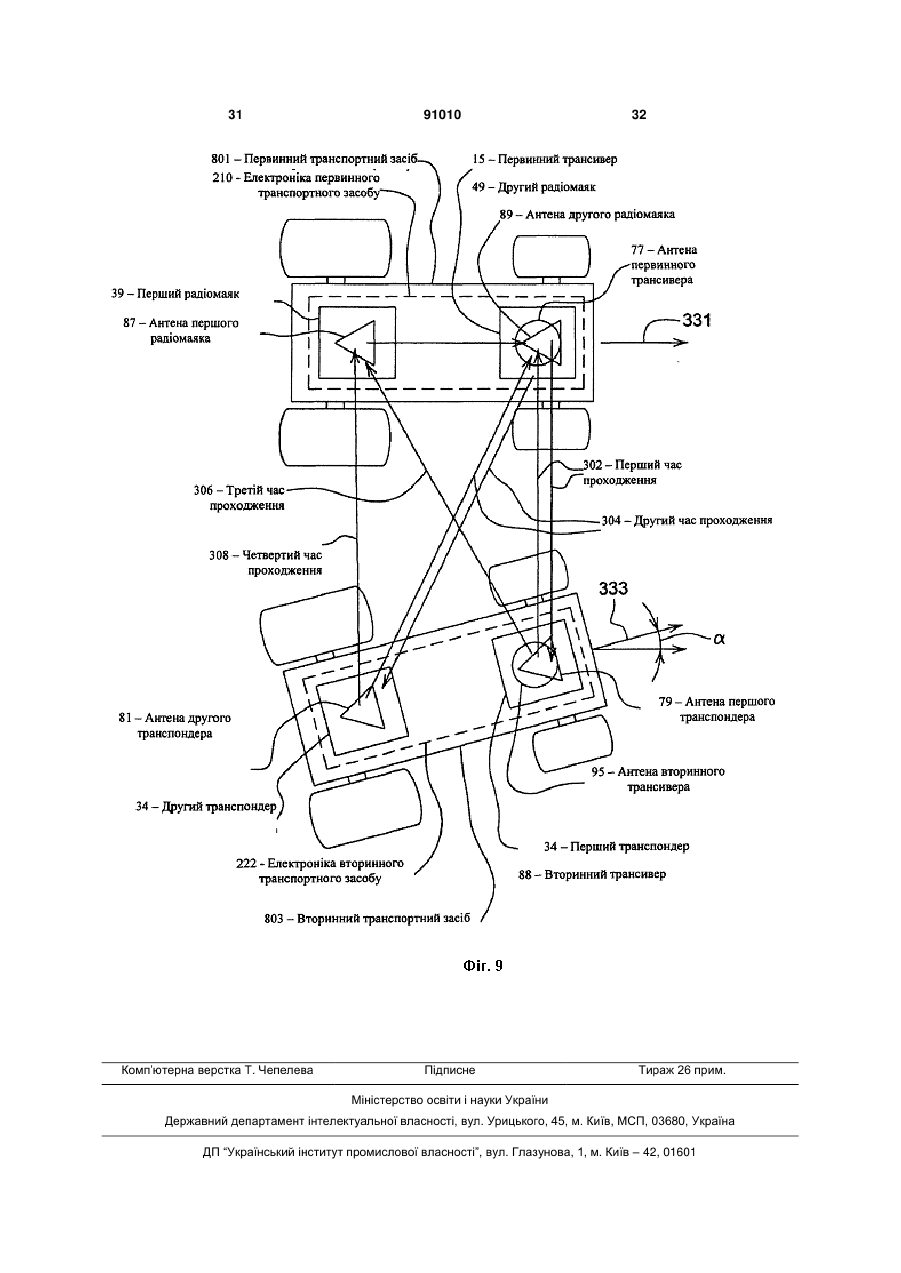
Номер патенту: 69620
Опубліковано: 15.09.2004
Автори: Мальнов Сергій Іванович, Плешкановський Олег Валентинович, Денис Василь Володимирович, Козлинський Мирослав Петрович
МПК: B60C 23/00
Мітки: здійснення, положення, пристрій, центра, транспортного, колісного, визначення, ваги, спосіб, засобу
Формула / Реферат:
1. Спосіб визначення положення центра ваги колісного транспортного засобу, що включає визначення тиску повітря в шинах, його порівняння з розрахунковим, який відрізняється тим, що визначають тиск повітря в кожній шині коліс, визначають величини вертикальних навантажень на кожне із коліс, за якими визначають положення центра ваги колісного транспортного засобу в горизонтальній площині.2. Пристрій для визначення положення центра ваги...
Попередній патент: Хрестовина з рухомим гостряком для залізничної колії
Наступний патент: Спосіб генерування водню
Випадковий патент: Спосіб визначення ефективних параметрів дегазації і розвантаження вугільного пласта гідродинамічною дією