Система мікропроцесорної централізації
Номер патенту: 67647
Опубліковано: 27.02.2012
Автори: Виростко Петро, Мігалчо Мартин, Неметг Штефан, Шторек Владімір, Басов Володимир Ілліч, Губл Франтішек, Долечек Їржі, Поляков Петро Федорович, Грбавчиц Ондржей, Шпортко Володимир Павлович
Формула / Реферат
Система мікропроцесорної централізації, що містить автоматизоване робоче місце чергового по станції, автоматизоване робоче місце електромеханіка, перший комутатор, перші і другі входи-виходи якого з'єднані відповідно з першими і третіми входами-виходами автоматизованого робочого місця чергового по станції, другий комутатор, перші і другі входи-виходи якого з'єднані відповідно з другими і четвертими входами-виходами автоматизованого робочого місця чергового по станції, п'яті входи-виходи першого комутатора з'єднані з п'ятими входами-виходами другого комутатора, блок підключення, перший і другий виконавчі блоки, блок узгодження, другі входи якого з'єднані з шостими виходами першого і з шостими виходами другого виконавчих блоків, сьомі виходи якого підключені до сьомих виходів першого виконавчого блока і до третіх входів блока узгодження, шості виходи якого з'єднані з третіми входами першого і другого виконавчих блоків, блок контролю локальних об'єктів, виходи якого підключені до перших входів блока узгодження, блок управління локальними об'єктами, входи якого з'єднані з п'ятими виходами блока узгодження, вихідні шини, до яких підключені виходи блока управління локальними об'єктами, вхідні шини, які з'єднані з входами блока контролю локальних об'єктів, яка відрізняється тим, що введені перший і другий комунікаційні комп'ютери і кільцева мережа, треті входи-виходи автоматизованого робочого місця електромеханіка з'єднані з другими входами-виходами другого комунікаційного комп'ютера, перші входи-виходи якого підключені до четвертих входів-виходів другого комутатора, треті входи-виходи якого з'єднані з другими входами-виходами блока підключення, перші входи-виходи якого підключені до третіх входів-виходів першого комутатора, четверті входи-виходи якого з'єднані з першими входами-виходами першого комунікаційного комп'ютера, другі входи-виходи якого підключені до других входів-виходів автоматизованого робочого місця електромеханіка, перші входи-виходи якого з'єднані з третіми входами-виходами блока підключення, треті входи-виходи першого і треті входи-виходи другого комунікаційних комп'ютерів підключені відповідно до перших і других входів-виходів кільцевої мережі, треті входи-виходи і четверті входи-виходи якої з'єднані відповідно з першими і другими входами-виходами першого виконавчого блока, четверті й п'яті входи-виходи якого підключені відповідно до четвертих і п'ятих входів-виходів другого виконавчого блока, перші й другі входи-виходи якого з'єднані відповідно з п'ятими і шостими входами-виходами кільцевої мережі.
Текст
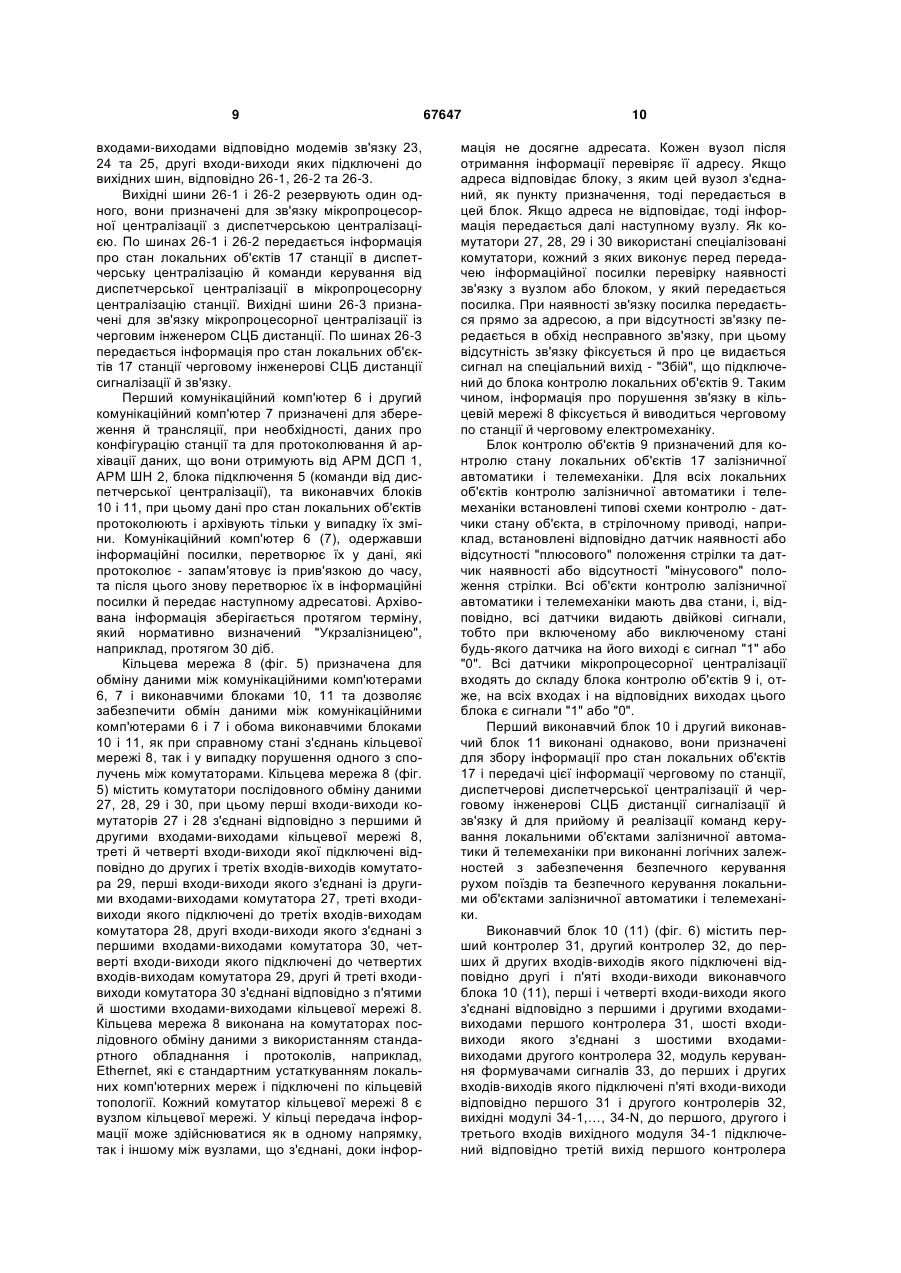
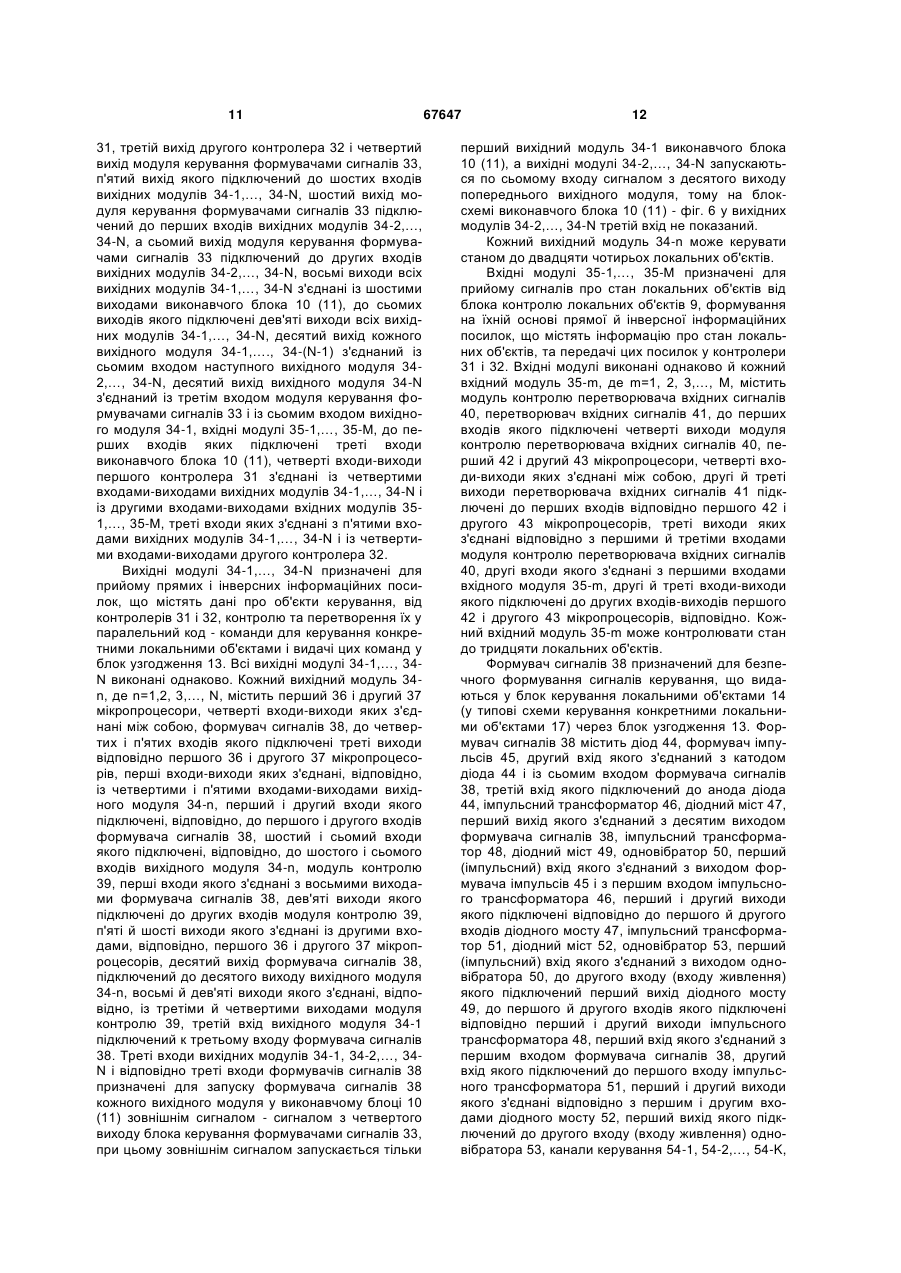
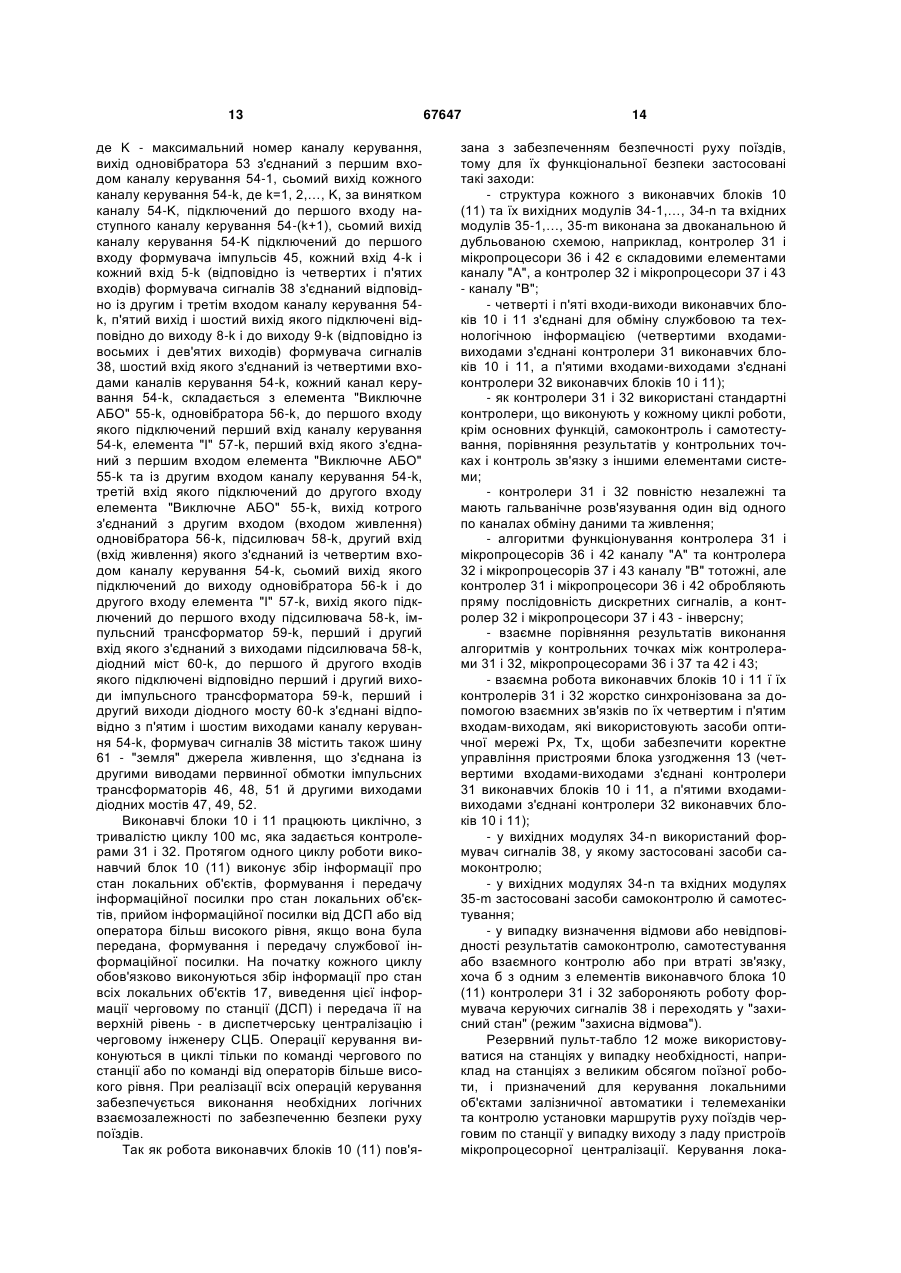
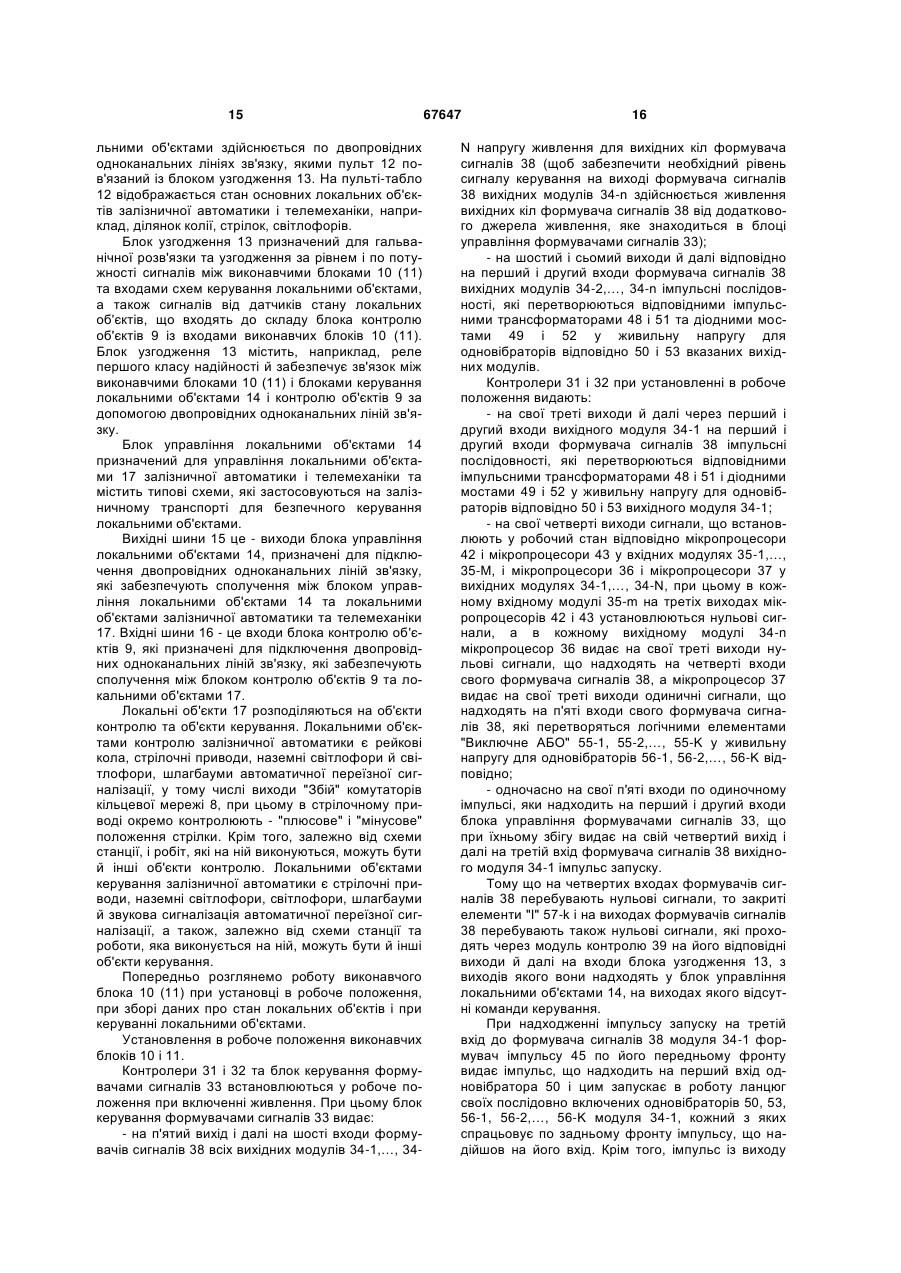
Система мікропроцесорної централізації, що містить автоматизоване робоче місце чергового по станції, автоматизоване робоче місце електромеханіка, перший комутатор, перші і другі входивиходи якого з'єднані відповідно з першими і третіми входами-виходами автоматизованого робочого місця чергового по станції, другий комутатор, перші і другі входи-виходи якого з'єднані відповідно з другими і четвертими входами-виходами автоматизованого робочого місця чергового по станції, п'яті входи-виходи першого комутатора з'єднані з п'ятими входами-виходами другого комутатора, блок підключення, перший і другий виконавчі блоки, блок узгодження, другі входи якого з'єднані з шостими виходами першого і з шостими виходами другого виконавчих блоків, сьомі виходи якого підключені до сьомих виходів першого виконавчого блока і до третіх входів блока узгодження, шості виходи якого з'єднані з третіми входами першого і другого виконавчих блоків, блок контролю локальних об'єктів, виходи якого підключені до перших входів блока узгодження, блок управління локаль U 2 (19) 1 3 підключені до перших входів усіх контролерів централізації, що управляють. Ця система мікропроцесорної централізації МПЦ-И так само, як і мікропроцесорна централізація, що заявляється, містить автоматизоване робоче місце чергового по станції, що складається з основного й резервного комплектів, автоматизоване робоче місце електромеханіка, виконавчі блоки (контролери централізації, що управляють), блоки узгодження, контролю локальних об'єктів, управління локальними об'єктами (пристрій узгодження об'єктів) вхідні й вихідні шини. Проте, відсутність комутаторів, комунікаційних комп'ютерів і кільцевої мережі різко звужує функціональні можливості пристрою й надійність його функціонування. Відома двоканальна система для регулювання руху залізничних транспортних засобів (див. патент РФ № 2286279, МПК B61L 27/04, опубл. 27.10.2008), що містить модуль центрального процесора, що складається з двох однакових процесорних комплектів і схеми вбудованого апаратного контролю, перші і другі входи-виходи якої з'єднані з першими входами-виходами, відповідно, першого і другого процесорного комплекту модуля центрального процесора, модуль струмових сигналів, контакти об'єктів контролю, з'єднані паралельно і підключені до входів модуля струмових сигналів, модуль релейних виходів, виконавчі пристрої електричної централізації, входи яких з'єднані з виходами модуля релейних виходів, модуль безпечних виходів, при цьому усі модулі пов'язані між собою системною шиною, яка складається з двох ідентичних шин, кожна з яких підключена до відповідного процесорного комплекту. Ця двоканальна система для регулювання руху залізничних транспортних засобів так само, як і мікропроцесорна централізація, що заявляється, містить перший і другий виконавчі блоки (процесорні комплекти), блоки узгодження, контролю локальних об'єктів, управління локальними об'єктами (контакти об'єктів контролю, виконавчі пристрої, модулі струмових входів-виходів, релейних виходів і безпечних виходів), вхідні і вихідні шини. Проте відсутність комутаторів, комунікаційних комп'ютерів і кільцевої мережі різко звужує функціональні можливості системи і надійність її функціонування. Найбільш близькою по технічній суті є мікропроцесорна система електричної централізації МПЦ-МПК (див. Сапожников В.В., Никитин А.Б. Микропроцессорная система электрической централизации МПЦ-МПК, "Наука и транспорт", 2009, с. 18-20), що містить автоматизоване робоче місце чергового по станції (АРМ ДСП), що складається з першого і другого комплектів, автоматизоване робоче місце електромеханіка (АРМ ШН), перший і другий комутатори, перші входи-виходи яких, сьомі входи-виходи другого комутатора, входи-виходи першого і другого комплектів АРМ ДСП і входи-виходи АРМ ШН ув'язані між собою локальною обчислювальною мережею, шості входивиходи другого комутатора підключені до шостих входів-виходів першого комутатора, перший і другий безпечний обчислювальний комплекти, перші 67647 4 входи-виходи яких з'єднані з другими входамивиходами відповідно першого і другого комутаторів, треті входи-виходи яких підключені до третіх входів-виходів відповідно першого і другого безпечних обчислювальних комплектів, другі входивиходи яких з'єднані з четвертими входамивиходами відповідно другого і першого комутаторів, п'яті входи-виходи яких підключені до четвертих входів-виходів відповідно першого і другого безпечних обчислювальних комплектів, комплекс технічних засобів для ув'язки з іншими підсистемами, блок контролерів безпечного сполучення по контролю об'єктів і блок контролерів безпечного сполучення по управлінню об'єктами, п'яті входивиходи першого і другого безпечних обчислювальних комплектів, виходи блока контролерів безпечного сполучення по контролю об'єктів, входи блока контролерів безпечного сполучення по управлінню об'єктами і входи-виходи комплексу технічних засобів для ув'язки з іншими підсистемами, пов'язані між собою системною шиною, вхідні шини, які з'єднані з входами блока контролерів безпечного сполучення по контролю об'єктів, вихідні шини, до яких підключені виходи блока контролерів безпечного сполучення по управлінню об'єктами, при цьому кожен безпечний обчислювальний комплект складається з першого і другого контролерів логіки централізації, до перших і других входів-виходів першого з яких підключені відповідно перші і другі входи-виходи безпечного обчислювального комплекту, а до перших і других входів-виходів другого з яких підключені відповідно треті і четверті входи-виходи безпечного обчислювального комплекту та з блока контролю функціонування безпечного обчислювального комплекту, перші і другі входи-виходи якого з'єднані відповідно з третіми входами-виходами першого і другого контролерів логіки централізації, треті входи-виходи блока контролю функціонування безпечного обчислювального комплекту підключені до п'ятих входів-виходів безпечного обчислювального комплекту. Ця мікропроцесорна система електричної централізації МПЦ-МПК так само, як і мікропроцесорна централізація, що заявляється, містить автоматизоване робоче місце чергового по станції, автоматизоване робоче місце електромеханіка, перший і другий комутатори, блок підключення, перший і другий виконавчі блоки, блок узгодження, блок контролю локальних об'єктів, блок управління локальними об'єктами, вихідні шини і вхідні шини. Проте, відсутність кільцевої мережі і першого і другого комунікаційних комп'ютерів знижує надійність функціонування відомої системи мікропроцесорної централізації. У основу корисної моделі, що заявляється, поставлено задачу удосконалення системи мікропроцесорної централізації шляхом підвищення надійності її функціонування. Поставлена задача вирішується тим, що у відому систему мікропроцесорну централізацію, що містить автоматизоване робоче місце чергового по станції, автоматизоване робоче місце електромеханіка, перший комутатор, перші і другі входивиходи якого з'єднані відповідно з першими і третіми входами-виходами автоматизованого робочо 5 го місця чергового по станції, другий комутатор, перші і другі входи-виходи якого з'єднані відповідно з другими і четвертими входами-виходами автоматизованого робочого місця чергового по станції, п'яті входи-виходи першого комутатора з'єднані з п'ятими входами-виходами другого комутатора, блок підключення, перший і другий виконавчі блоки, блок узгодження, другі входи якого з'єднані з шостими виходами першого і з шостими виходами другого виконавчих блоків, сьомі виходи якого підключені до сьомих виходів першого виконавчого блока і до третіх входів блока узгодження, шості виходи якого з'єднані з третіми входами першого і другого виконавчих блоків, блок контролю локальних об'єктів, виходи якого підключені до перших входів блока узгодження, блок управління локальними об'єктами, входи якого з'єднані з п'ятими виходами блока узгодження, вихідні шини, до яких підключені виходи блока управління локальними об'єктами, вхідні шини, які з'єднані з входами блока контролю локальних об'єктів, згідно з корисною моделлю, що заявляється, введені перший і другий комунікаційні комп'ютери і кільцева мережа, треті входи-виходи автоматизованого робочого місця електромеханіка з'єднані з другими входамивиходами другого комунікаційного комп'ютера, перші входи-виходи якого підключені до четвертих входів-виходів другого комутатора, треті входивиходи якого з'єднані з другими входами-виходами блока підключення, перші входи-виходи якого підключені до третіх входів-виходів першого комутатора, четверті входи-виходи якого з'єднані з першими входами-виходами першого комунікаційного комп'ютера, другі входи-виходи якого підключені до других входів-виходів автоматизованого робочого місця електромеханіка, перші входи-виходи якого з'єднані з третіми входами-виходами блока підключення, треті входи-виходи першого і треті входи-виходи другого комунікаційних комп'ютерів підключені, відповідно, до перших і других входіввиходів кільцевої мережі, треті входи-виходи і четверті входи-виходи якої з'єднані відповідно з першими і другими входами-виходами першого виконавчого блока, четверті й п'яті входи-виходи якого підключені відповідно до четвертих і п'ятих входіввиходів другого виконавчого блока, перші й другі входи-виходи якого з'єднані відповідно з п'ятими і шостими входами-виходами кільцевої мережі. Введення першого і другого комунікаційних комп'ютерів і кільцевої мережі підвищило надійність функціонування системи мікропроцесорної централізації за рахунок того, що: - при використанні кільцевої мережі виконавчі блоки можуть мати лише два входи-виходи для підключення двох дубльованих каналів, що підвищує надійність функціонування мікропроцесорної централізації, тому що при використанні інших мереж, наприклад, мереж з топологією "повний граф" необхідно використовувати чотири входивиходи, що ускладнює виконавчі блоки й відповідно знижує надійність їхнього функціонування як через конструктивне ускладнення, так і через ускладнення програмного забезпечення; - введення комунікаційних комп'ютерів дозволяє використовувати в комп'ютерах автоматизова 67647 6 ного робочого місця чергового по станції та комп'ютерах виконавчих блоків типове програмне забезпечення незалежне від топології залізничної станції, що, у свою чергу дозволяє уніфікувати апаратне і програмне забезпечення в комп'ютерах автоматизованого робочого місця чергового по станції та виконавчих блоків і веде до підвищення надійності функціонування мікропроцесорної централізації, за рахунок зменшення часу усунення комп'ютера, що відмовив, без зміни програмного забезпечення, крім того, комунікаційні комп'ютери виконують архівацію отриманих даних від автоматизованого робочого місця чергового по станції та виконавчих блоків, що дозволяє забезпечити доступ до архівів тільки в режими перегляду з автоматизованого робочого місця електромеханіка, що знижує ймовірність стороннього втручання в роботу мікропроцесорної централізації й відповідно підвищує надійність її функціонування. На кресленнях наведені: фіг. 1 - блок-схема мікропроцесорної централізації; фіг. 2 - блок-схема автоматизованого робочого місця чергового по станції (АРМ ДСП); фіг. 3 - блок-схема автоматизованого робочого місця електромеханіка (АРМ ШН); фіг. 4 - блок схема блока підключення; фіг. 5 - блок-схема кільцевої мережі; фіг. 6 - блок схема виконавчого блока; фіг. 7 - функціональна схема формувача керуючих сигналів. Система мікропроцесорної централізації містить автоматизоване робоче місце чергового по станції (АРМ ДСП) 1, автоматизоване робоче місце електромеханіка (АРМ ШН) 2, перший комутатор 3, перші та другі входи-виходи якого з'єднані відповідно з першими та третіми входамивиходами АРМ ДСП 1, другий комутатор 4, перші та другі входи-виходи якого з'єднані відповідно з другими та четвертими входами-виходами АРМ ДСП 1, блок підключення 5, перші входи-виходи якого підключені к третім входам-виходам першого комутатора 3, п'яті входи-виходи якого з'єднані з п'ятими входами-виходами комутатора 4, треті входи-виходи якого підключені к другим входамвиходам блока підключення 5, треті входи-виходи якого з'єднані з першими входами-виходами АРМ ШН 2, перший комунікаційний комп'ютер 6, до перших входів-виходів якого підключені четверті входи-виходи першого комутатора 3, другий комунікаційний комп'ютер 7, перші входи-виходи якого з'єднані з четвертими входами-виходами другого комутатора 4, кільцеву мережу 8, до перших і других входів-виходів якої підключені треті входивиходи відповідно першого 6 і другого 7 комунікаційних комп'ютерів, другі входи-виходи яких з'єднані відповідно з другими і з третіми входамивиходами АРМ ШН 2, блок контролю об'єктів 9, перший виконавчий блок 10, другий виконавчий блок 11, перші і другі входи-виходи якого з'єднані відповідно з п'ятими і шостими входами-виходами кільцевої мережі 8, треті і четверті входи-виходи якої підключені відповідно до перших і других входів-виходів першого виконавчого блока 10, четвер 7 ті і п'яті входи-виходи якого з'єднані відповідно з четвертими і п'ятими входами-виходами другого виконавчого блока 11, резервний пульт-табло 12, блок узгодження 13, до перших входів якого підключені виходи блока контролю об'єктів 9, блок управління локальними об'єктами 14, входи якого з'єднані з п'ятими виходами блока узгодження 13, шості виходи якого з'єднані з третіми входами першого виконавчого блока 10 і з третіми входами другого виконавчого блока 11, шості виходи якого підключені до шостих виходів першого виконавчого блока 10 і до других входів блока узгодження 13, треті входи якого з'єднані з сьомими виходами першого виконавчого блока 10 і з сьомими виходами другого виконавчого блока 11, вихідні шини (шини управління) 15, до яких підключені виходи блока управління об'єктами 14, вхідні шини (шини стану) 16, які з'єднані з входами блока контролю об'єктів 9 і локальні об'єкти 17, до входів управління яких підключені вихідні шини 15, а інформаційні виходи локальних об'єктів 17 з'єднані з вхідними шинами 16. На фіг. 1 резервний пульт-табло 12 і локальні об'єкти 17 та їх зв'язки показані пунктиром, так як резервний пульт-табло 12 може входити, а може не входити до складу мікропроцесорної централізації, а число, види і місцезнаходження локальних об'єктів мікропроцесорної централізації 17 змінюються в залежності від станції. Автоматизоване робоче місце чергового по станції 1 призначено для організації взаємодії людини - чергового по станції з апаратурою мікропроцесорної централізації, а саме - уведення команд керування локальними об'єктами централізації (стрілками, світлофорами) від чергового по станції, подачу в необхідних випадках звукових і візуальних команд, відображення стану локальних об'єктів централізації для чергового по станції. Автоматизоване робоче місце чергового по станції (АРМ ДСП) 1 (фіг. 2) містить перший комп'ютер керування 18 і другий комп'ютер керування 19, при цьому перші й другі входи-виходи комп'ютера 18 підключені відповідно до перших і других входів-виходів автоматизованого робочого місця чергового по станції 1, до третіх і четвертих входіввиходам якого підключені відповідно перші й другі входи-виходи комп'ютера 19. При роботі мікропроцесорної централізації обидва комп'ютери 18 і 19 АРМ ДСП 1 перебувають у включеному стані, вони одержують інформацію про стан локальних об'єктів станції й виводять її кожний на свій монітор, і активовані - черговий по станції може видавати команди по керуванню локальними об'єктами 17 з кожного з них. Автоматизоване робоче місце електромеханіка 2 призначено для контролю роботи мікропроцесорної централізації й умов її роботи. Автоматизоване робоче місце електромеханіка 2 (фіг. 3) містить комутатор 20 і комп'ютер контролю 21, входи-виходи якого з'єднані з п'ятими входамивиходами комутатора 20, перші, другі й треті входи-виходи якого підключені відповідно до перших, других і третіх входів-виходам автоматизованого робочого місця електромеханіка 2, вхідні-вихідні шини 22, які з'єднані із четвертими входами 67647 8 виходами комутатора 20. Автоматизоване робоче місце електромеханіка 2 забезпечує виконання: - контролю функціонування мікропроцесорної централізації на основі інформації про стан локальних об'єктів залізничної автоматики і телемеханіки, що надходить від виконавчого блока 10 (11) шляхом виявлення позаштатних ситуацій, наприклад таких, як "втрата контролю положення стрілки", коли обидва реле положення стрілки перебувають або у включеному стані або у виключеному стані, або "помилкова зайнятість ділянки", коли з'являється сигнал про зайнятість ділянки при відсутності руху рухомого складу та при відсутності рухомого складу на сусідніх ділянках; - збору із установленим періодом інформації про умови роботи централізації, зокрема, величин напруг живлення, величин струму переводу стрілок, величин опорів ізоляції, величин температур у релейних шафах і температури повітря релейного приміщення й тому подібного; - контролю інформації про умови роботи централізації шляхом порівняння значення кожного параметра, що характеризує умови роботи централізації, із установленими граничними значеннями й видачу черговому електромеханіку інформації про порушення умов роботи тільки воно з'явиться; - передачі інформації про стан об'єктів і порушення умов роботи об'єктів черговому інженерові СЦБ дистанції сигналізації й зв'язку за допомогою блока підключення 5. Для забезпечення збору інформації про умови роботи централізації на об'єктах установлені відповідні датчики, які підключені до шин 22 і далі через комутатор 20 до комп'ютера 21. Перший комутатор 3 і другий комутатор 4 є стандартним обладнанням локальних комп'ютерних мереж та призначені для забезпечення обміну даними між АРМ ДСП 1 і комунікаційними комп'ютерами 6 і 7 та блоком підключення 5, в якому застосовуються засоби послідовного обміну даними з використанням стандартного обладнання і протоколів, які використовуються в системах диспетчерського керування і контролю. За рахунок сполучень першого йдругого входів-виходів комутаторів 3 і 4 з АРМ ДСП 1 забезпечується обмін даними комп'ютерів управління 18 і 19 АРМ ДСП 1 з двома комунікаційними комп'ютерами 6 і 7. Сполучення між п'ятими входами-виходами комутаторів 3 і 4 забезпечує обмін даними комп'ютерів управління 18 і 19 АРМ ДСП 1 з двома комунікаційними комп'ютерами 6 і 7 у випадку порушення одного сполучення комутатора 3 або 4 з АРМ ДСП 1. Блок підключення 5 (фіг. 4) містить стандартне обладнання передачі даних: це перший модем зв'язку 23 і другий модем зв'язку 24, які забезпечують підключення мікропроцесорної централізації до диспетчерської централізації, та третій модем зв'язку 25, який забезпечує підключення мікропроцесорної централізації до системи диспетчерського контролю чергового інженера СЦБ дистанції сигналізації та зв'язку, при цьому перші, другі і треті входи-виходи блока 5 з'єднані з першими 9 входами-виходами відповідно модемів зв'язку 23, 24 та 25, другі входи-виходи яких підключені до вихідних шин, відповідно 26-1, 26-2 та 26-3. Вихідні шини 26-1 і 26-2 резервують один одного, вони призначені для зв'язку мікропроцесорної централізації з диспетчерською централізацією. По шинах 26-1 і 26-2 передається інформація про стан локальних об'єктів 17 станції в диспетчерську централізацію й команди керування від диспетчерської централізації в мікропроцесорну централізацію станції. Вихідні шини 26-3 призначені для зв'язку мікропроцесорної централізації із черговим інженером СЦБ дистанції. По шинах 26-3 передається інформація про стан локальних об'єктів 17 станції черговому інженерові СЦБ дистанції сигналізації й зв'язку. Перший комунікаційний комп'ютер 6 і другий комунікаційний комп'ютер 7 призначені для збереження й трансляції, при необхідності, даних про конфігурацію станції та для протоколювання й архівації даних, що вони отримують від АРМ ДСП 1, АРМ ШН 2, блока підключення 5 (команди від диспетчерської централізації), та виконавчих блоків 10 і 11, при цьому дані про стан локальних об'єктів протоколюють і архівують тільки у випадку їх зміни. Комунікаційний комп'ютер 6 (7), одержавши інформаційні посилки, перетворює їх у дані, які протоколює - запам'ятовує із прив'язкою до часу, та після цього знову перетворює їх в інформаційні посилки й передає наступному адресатові. Архівована інформація зберігається протягом терміну, який нормативно визначений "Укрзалізницею", наприклад, протягом 30 діб. Кільцева мережа 8 (фіг. 5) призначена для обміну даними між комунікаційними комп'ютерами 6, 7 і виконавчими блоками 10, 11 та дозволяє забезпечити обмін даними між комунікаційними комп'ютерами 6 і 7 і обома виконавчими блоками 10 і 11, як при справному стані з'єднань кільцевої мережі 8, так і у випадку порушення одного з сполучень між комутаторами. Кільцева мережа 8 (фіг. 5) містить комутатори послідовного обміну даними 27, 28, 29 і 30, при цьому перші входи-виходи комутаторів 27 і 28 з'єднані відповідно з першими й другими входами-виходами кільцевої мережі 8, треті й четверті входи-виходи якої підключені відповідно до других і третіх входів-виходів комутатора 29, перші входи-виходи якого з'єднані із другими входами-виходами комутатора 27, треті входивиходи якого підключені до третіх входів-виходам комутатора 28, другі входи-виходи якого з'єднані з першими входами-виходами комутатора 30, четверті входи-виходи якого підключені до четвертих входів-виходам комутатора 29, другі й треті входивиходи комутатора 30 з'єднані відповідно з п'ятими й шостими входами-виходами кільцевої мережі 8. Кільцева мережа 8 виконана на комутаторах послідовного обміну даними з використанням стандартного обладнання і протоколів, наприклад, Ethernet, які є стандартним устаткуванням локальних комп'ютерних мереж і підключені по кільцевій топології. Кожний комутатор кільцевої мережі 8 є вузлом кільцевої мережі. У кільці передача інформації може здійснюватися як в одному напрямку, так і іншому між вузлами, що з'єднані, доки інфор 67647 10 мація не досягне адресата. Кожен вузол після отримання інформації перевіряє її адресу. Якщо адреса відповідає блоку, з яким цей вузол з'єднаний, як пункту призначення, тоді передається в цей блок. Якщо адреса не відповідає, тоді інформація передається далі наступному вузлу. Як комутатори 27, 28, 29 і 30 використані спеціалізовані комутатори, кожний з яких виконує перед передачею інформаційної посилки перевірку наявності зв'язку з вузлом або блоком, у який передається посилка. При наявності зв'язку посилка передається прямо за адресою, а при відсутності зв'язку передається в обхід несправного зв'язку, при цьому відсутність зв'язку фіксується й про це видається сигнал на спеціальний вихід - "Збій", що підключений до блока контролю локальних об'єктів 9. Таким чином, інформація про порушення зв'язку в кільцевій мережі 8 фіксується й виводиться черговому по станції й черговому електромеханіку. Блок контролю об'єктів 9 призначений для контролю стану локальних об'єктів 17 залізничної автоматики і телемеханіки. Для всіх локальних об'єктів контролю залізничної автоматики і телемеханіки встановлені типові схеми контролю - датчики стану об'єкта, в стрілочному приводі, наприклад, встановлені відповідно датчик наявності або відсутності "плюсового" положення стрілки та датчик наявності або відсутності "мінусового" положення стрілки. Всі об'єкти контролю залізничної автоматики і телемеханіки мають два стани, і, відповідно, всі датчики видають двійкові сигнали, тобто при включеному або виключеному стані будь-якого датчика на його виході є сигнал "1" або "0". Всі датчики мікропроцесорної централізації входять до складу блока контролю об'єктів 9 і, отже, на всіх входах і на відповідних виходах цього блока є сигнали "1" або "0". Перший виконавчий блок 10 і другий виконавчий блок 11 виконані однаково, вони призначені для збору інформації про стан локальних об'єктів 17 і передачі цієї інформації черговому по станції, диспетчерові диспетчерської централізації й черговому інженерові СЦБ дистанції сигналізації й зв'язку й для прийому й реалізації команд керування локальними об'єктами залізничної автоматики й телемеханіки при виконанні логічних залежностей з забезпечення безпечного керування рухом поїздів та безпечного керування локальними об'єктами залізничної автоматики і телемеханіки. Виконавчий блок 10 (11) (фіг. 6) містить перший контролер 31, другий контролер 32, до перших й других входів-виходів якого підключені відповідно другі і п'яті входи-виходи виконавчого блока 10 (11), перші і четверті входи-виходи якого з'єднані відповідно з першими і другими входамивиходами першого контролера 31, шості входивиходи якого з'єднані з шостими входамивиходами другого контролера 32, модуль керування формувачами сигналів 33, до перших і других входів-виходів якого підключені п'яті входи-виходи відповідно першого 31 і другого контролерів 32, вихідні модулі 34-1,…, 34-N, до першого, другого і третього входів вихідного модуля 34-1 підключений відповідно третій вихід першого контролера 11 31, третій вихід другого контролера 32 і четвертий вихід модуля керування формувачами сигналів 33, п'ятий вихід якого підключений до шостих входів вихідних модулів 34-1,…, 34-N, шостий вихід модуля керування формувачами сигналів 33 підключений до перших входів вихідних модулів 34-2,…, 34-N, a сьомий вихід модуля керування формувачами сигналів 33 підключений до других входів вихідних модулів 34-2,…, 34-N, восьмі виходи всіх вихідних модулів 34-1,…, 34-N з'єднані із шостими виходами виконавчого блока 10 (11), до сьомих виходів якого підключені дев'яті виходи всіх вихідних модулів 34-1,…, 34-N, десятий вихід кожного вихідного модуля 34-1,…., 34-(N-1) з'єднаний із сьомим входом наступного вихідного модуля 342,…, 34-N, десятий вихід вихідного модуля 34-N з'єднаний із третім входом модуля керування формувачами сигналів 33 і із сьомим входом вихідного модуля 34-1, вхідні модулі 35-1,…, 35-М, до перших входів яких підключені треті входи виконавчого блока 10 (11), четверті входи-виходи першого контролера 31 з'єднані із четвертими входами-виходами вихідних модулів 34-1,…, 34-N і із другими входами-виходами вхідних модулів 351,…, 35-М, треті входи яких з'єднані з п'ятими входами вихідних модулів 34-1,…, 34-N і із четвертими входами-виходами другого контролера 32. Вихідні модулі 34-1,…, 34-N призначені для прийому прямих і інверсних інформаційних посилок, що містять дані про об'єкти керування, від контролерів 31 і 32, контролю та перетворення їх у паралельний код - команди для керування конкретними локальними об'єктами і видачі цих команд у блок узгодження 13. Всі вихідні модулі 34-1,…, 34N виконані однаково. Кожний вихідний модуль 34n, де n=1,2, 3,…, N, містить перший 36 і другий 37 мікропроцесори, четверті входи-виходи яких з'єднані між собою, формувач сигналів 38, до четвертих і п'ятих входів якого підключені треті виходи відповідно першого 36 і другого 37 мікропроцесорів, перші входи-виходи яких з'єднані, відповідно, із четвертими і п'ятими входами-виходами вихідного модуля 34-n, перший і другий входи якого підключені, відповідно, до першого і другого входів формувача сигналів 38, шостий і сьомий входи якого підключені, відповідно, до шостого і сьомого входів вихідного модуля 34-n, модуль контролю 39, перші входи якого з'єднані з восьмими виходами формувача сигналів 38, дев'яті виходи якого підключені до других входів модуля контролю 39, п'яті й шості виходи якого з'єднані із другими входами, відповідно, першого 36 і другого 37 мікропроцесорів, десятий вихід формувача сигналів 38, підключений до десятого виходу вихідного модуля 34-n, восьмі й дев'яті виходи якого з'єднані, відповідно, із третіми й четвертими виходами модуля контролю 39, третій вхід вихідного модуля 34-1 підключений к третьому входу формувача сигналів 38. Треті входи вихідних модулів 34-1, 34-2,…, 34N і відповідно треті входи формувачів сигналів 38 призначені для запуску формувача сигналів 38 кожного вихідного модуля у виконавчому блоці 10 (11) зовнішнім сигналом - сигналом з четвертого виходу блока керування формувачами сигналів 33, при цьому зовнішнім сигналом запускається тільки 67647 12 перший вихідний модуль 34-1 виконавчого блока 10 (11), а вихідні модулі 34-2,…, 34-N запускаються по сьомому входу сигналом з десятого виходу попереднього вихідного модуля, тому на блоксхемі виконавчого блока 10 (11) - фіг. 6 у вихідних модулів 34-2,…, 34-N третій вхід не показаний. Кожний вихідний модуль 34-n може керувати станом до двадцяти чотирьох локальних об'єктів. Вхідні модулі 35-1,…, 35-М призначені для прийому сигналів про стан локальних об'єктів від блока контролю локальних об'єктів 9, формування на їхній основі прямої й інверсної інформаційних посилок, що містять інформацію про стан локальних об'єктів, та передачі цих посилок у контролери 31 і 32. Вхідні модулі виконані однаково й кожний вхідний модуль 35-m, де m=1, 2, 3,…, М, містить модуль контролю перетворювача вхідних сигналів 40, перетворювач вхідних сигналів 41, до перших входів якого підключені четверті виходи модуля контролю перетворювача вхідних сигналів 40, перший 42 і другий 43 мікропроцесори, четверті входи-виходи яких з'єднані між собою, другі й треті виходи перетворювача вхідних сигналів 41 підключені до перших входів відповідно першого 42 і другого 43 мікропроцесорів, треті виходи яких з'єднані відповідно з першими й третіми входами модуля контролю перетворювача вхідних сигналів 40, другі входи якого з'єднані з першими входами вхідного модуля 35-m, другі й треті входи-виходи якого підключені до других входів-виходів першого 42 і другого 43 мікропроцесорів, відповідно. Кожний вхідний модуль 35-m може контролювати стан до тридцяти локальних об'єктів. Формувач сигналів 38 призначений для безпечного формування сигналів керування, що видаються у блок керування локальними об'єктами 14 (у типові схеми керування конкретними локальними об'єктами 17) через блок узгодження 13. Формувач сигналів 38 містить діод 44, формувач імпульсів 45, другий вхід якого з'єднаний з катодом діода 44 і із сьомим входом формувача сигналів 38, третій вхід якого підключений до анода діода 44, імпульсний трансформатор 46, діодний міст 47, перший вихід якого з'єднаний з десятим виходом формувача сигналів 38, імпульсний трансформатор 48, діодний міст 49, одновібратор 50, перший (імпульсний) вхід якого з'єднаний з виходом формувача імпульсів 45 і з першим входом імпульсного трансформатора 46, перший і другий виходи якого підключені відповідно до першого й другого входів діодного мосту 47, імпульсний трансформатор 51, діодний міст 52, одновібратор 53, перший (імпульсний) вхід якого з'єднаний з виходом одновібратора 50, до другого входу (входу живлення) якого підключений перший вихід діодного мосту 49, до першого й другого входів якого підключені відповідно перший і другий виходи імпульсного трансформатора 48, перший вхід якого з'єднаний з першим входом формувача сигналів 38, другий вхід якого підключений до першого входу імпульсного трансформатора 51, перший і другий виходи якого з'єднані відповідно з першим і другим входами діодного мосту 52, перший вихід якого підключений до другого входу (входу живлення) одновібратора 53, канали керування 54-1, 54-2,…, 54-K, 13 де K - максимальний номер каналу керування, вихід одновібратора 53 з'єднаний з першим входом каналу керування 54-1, сьомий вихід кожного каналу керування 54-k, де k=1, 2,…, K, за винятком каналу 54-K, підключений до першого входу наступного каналу керування 54-(k+1), сьомий вихід каналу керування 54-K підключений до першого входу формувача імпульсів 45, кожний вхід 4-k і кожний вхід 5-k (відповідно із четвертих і п'ятих входів) формувача сигналів 38 з'єднаний відповідно із другим і третім входом каналу керування 54k, п'ятий вихід і шостий вихід якого підключені відповідно до виходу 8-k і до виходу 9-k (відповідно із восьмих і дев'ятих виходів) формувача сигналів 38, шостий вхід якого з'єднаний із четвертими входами каналів керування 54-k, кожний канал керування 54-k, складається з елемента "Виключне АБО" 55-k, одновібратора 56-k, до першого входу якого підключений перший вхід каналу керування 54-k, елемента "І" 57-k, перший вхід якого з'єднаний з першим входом елемента "Виключне АБО" 55-k та із другим входом каналу керування 54-k, третій вхід якого підключений до другого входу елемента "Виключне АБО" 55-k, вихід котрого з'єднаний з другим входом (входом живлення) одновібратора 56-k, підсилювач 58-k, другий вхід (вхід живлення) якого з'єднаний із четвертим входом каналу керування 54-k, сьомий вихід якого підключений до виходу одновібратора 56-k і до другого входу елемента "І" 57-k, вихід якого підключений до першого входу підсилювача 58-k, імпульсний трансформатор 59-k, перший і другий вхід якого з'єднаний з виходами підсилювача 58-k, діодний міст 60-k, до першого й другого входів якого підключені відповідно перший і другий виходи імпульсного трансформатора 59-k, перший і другий виходи діодного мосту 60-k з'єднані відповідно з п'ятим і шостим виходами каналу керування 54-k, формувач сигналів 38 містить також шину 61 - "земля" джерела живлення, що з'єднана із другими виводами первинної обмотки імпульсних трансформаторів 46, 48, 51 й другими виходами діодних мостів 47, 49, 52. Виконавчі блоки 10 і 11 працюють циклічно, з тривалістю циклу 100 мс, яка задається контролерами 31 і 32. Протягом одного циклу роботи виконавчий блок 10 (11) виконує збір інформації про стан локальних об'єктів, формування і передачу інформаційної посилки про стан локальних об'єктів, прийом інформаційної посилки від ДСП або від оператора більш високого рівня, якщо вона була передана, формування і передачу службової інформаційної посилки. На початку кожного циклу обов'язково виконуються збір інформації про стан всіх локальних об'єктів 17, виведення цієї інформації черговому по станції (ДСП) і передача її на верхній рівень - в диспетчерську централізацію і черговому інженеру СЦБ. Операції керування виконуються в циклі тільки по команді чергового по станції або по команді від операторів більше високого рівня. При реалізації всіх операцій керування забезпечується виконання необхідних логічних взаємозалежності по забезпеченню безпеки руху поїздів. Так як робота виконавчих блоків 10 (11) пов'я 67647 14 зана з забезпеченням безпечності руху поїздів, тому для їх функціональної безпеки застосовані такі заходи: - структура кожного з виконавчих блоків 10 (11) та їх вихідних модулів 34-1,…, 34-n та вхідних модулів 35-1,…, 35-m виконана за двоканальною й дубльованою схемою, наприклад, контролер 31 і мікропроцесори 36 і 42 є складовими елементами каналу "А", а контролер 32 і мікропроцесори 37 і 43 - каналу "В"; - четверті і п'яті входи-виходи виконавчих блоків 10 і 11 з'єднані для обміну службовою та технологічною інформацією (четвертими входамивиходами з'єднані контролери 31 виконавчих блоків 10 і 11, а п'ятими входами-виходами з'єднані контролери 32 виконавчих блоків 10 і 11); - як контролери 31 і 32 використані стандартні контролери, що виконують у кожному циклі роботи, крім основних функцій, самоконтроль і самотестування, порівняння результатів у контрольних точках і контроль зв'язку з іншими елементами системи; - контролери 31 і 32 повністю незалежні та мають гальванічне розв'язування один від одного по каналах обміну даними та живлення; - алгоритми функціонування контролера 31 і мікропроцесорів 36 і 42 каналу "А" та контролера 32 і мікропроцесорів 37 і 43 каналу "В" тотожні, але контролер 31 і мікропроцесори 36 і 42 обробляють пряму послідовність дискретних сигналів, а контролер 32 і мікропроцесори 37 і 43 - інверсну; - взаємне порівняння результатів виконання алгоритмів у контрольних точках між контролерами 31 і 32, мікропроцесорами 36 і 37 та 42 і 43; - взаємна робота виконавчих блоків 10 і 11 ї їх контролерів 31 і 32 жорстко синхронізована за допомогою взаємних зв'язків по їх четвертим і п'ятим входам-виходам, які використовують засоби оптичної мережі Рх, Тх, щоби забезпечити коректне управління пристроями блока узгодження 13 (четвертими входами-виходами з'єднані контролери 31 виконавчих блоків 10 і 11, а п'ятими входамивиходами з'єднані контролери 32 виконавчих блоків 10 і 11); - у вихідних модулях 34-n використаний формувач сигналів 38, у якому застосовані засоби самоконтролю; - у вихідних модулях 34-n та вхідних модулях 35-m застосовані засоби самоконтролю й самотестування; - у випадку визначення відмови або невідповідності результатів самоконтролю, самотестування або взаємного контролю або при втраті зв'язку, хоча б з одним з елементів виконавчого блока 10 (11) контролери 31 і 32 забороняють роботу формувача керуючих сигналів 38 і переходять у "захисний стан" (режим "захисна відмова"). Резервний пульт-табло 12 може використовуватися на станціях у випадку необхідності, наприклад на станціях з великим обсягом поїзної роботи, і призначений для керування локальними об'єктами залізничної автоматики і телемеханіки та контролю установки маршрутів руху поїздів черговим по станції у випадку виходу з ладу пристроїв мікропроцесорної централізації. Керування лока 15 льними об'єктами здійснюється по двопровідних одноканальних лініях зв'язку, якими пульт 12 пов'язаний із блоком узгодження 13. На пульті-табло 12 відображається стан основних локальних об'єктів залізничної автоматики і телемеханіки, наприклад, ділянок колії, стрілок, світлофорів. Блок узгодження 13 призначений для гальванічної розв'язки та узгодження за рівнем і по потужності сигналів між виконавчими блоками 10 (11) та входами схем керування локальними об'єктами, а також сигналів від датчиків стану локальних об'єктів, що входять до складу блока контролю об'єктів 9 із входами виконавчих блоків 10 (11). Блок узгодження 13 містить, наприклад, реле першого класу надійності й забезпечує зв'язок між виконавчими блоками 10 (11) і блоками керування локальними об'єктами 14 і контролю об'єктів 9 за допомогою двопровідних одноканальних ліній зв'язку. Блок управління локальними об'єктами 14 призначений для управління локальними об'єктами 17 залізничної автоматики і телемеханіки та містить типові схеми, які застосовуються на залізничному транспорті для безпечного керування локальними об'єктами. Вихідні шини 15 це - виходи блока управління локальними об'єктами 14, призначені для підключення двопровідних одноканальних ліній зв'язку, які забезпечують сполучення між блоком управління локальними об'єктами 14 та локальними об'єктами залізничної автоматики та телемеханіки 17. Вхідні шини 16 - це входи блока контролю об'єктів 9, які призначені для підключення двопровідних одноканальних ліній зв'язку, які забезпечують сполучення між блоком контролю об'єктів 9 та локальними об'єктами 17. Локальні об'єкти 17 розподіляються на об'єкти контролю та об'єкти керування. Локальними об'єктами контролю залізничної автоматики є рейкові кола, стрілочні приводи, наземні світлофори й світлофори, шлагбауми автоматичної переїзної сигналізації, у тому числі виходи "Збій" комутаторів кільцевої мережі 8, при цьому в стрілочному приводі окремо контролюють - "плюсове" і "мінусове" положення стрілки. Крім того, залежно від схеми станції, і робіт, які на ній виконуються, можуть бути й інші об'єкти контролю. Локальними об'єктами керування залізничної автоматики є стрілочні приводи, наземні світлофори, світлофори, шлагбауми й звукова сигналізація автоматичної переїзної сигналізації, а також, залежно від схеми станції та роботи, яка виконується на ній, можуть бути й інші об'єкти керування. Попередньо розглянемо роботу виконавчого блока 10 (11) при установці в робоче положення, при зборі даних про стан локальних об'єктів і при керуванні локальними об'єктами. Установлення в робоче положення виконавчих блоків 10 і 11. Контролери 31 і 32 та блок керування формувачами сигналів 33 встановлюються у робоче положення при включенні живлення. При цьому блок керування формувачами сигналів 33 видає: - на п'ятий вихід і далі на шості входи формувачів сигналів 38 всіх вихідних модулів 34-1,…, 34 67647 16 N напругу живлення для вихідних кіл формувача сигналів 38 (щоб забезпечити необхідний рівень сигналу керування на виході формувача сигналів 38 вихідних модулів 34-n здійснюється живлення вихідних кіл формувача сигналів 38 від додаткового джерела живлення, яке знаходиться в блоці управління формувачами сигналів 33); - на шостий і сьомий виходи й далі відповідно на перший і другий входи формувача сигналів 38 вихідних модулів 34-2,…, 34-n імпульсні послідовності, які перетворюються відповідними імпульсними трансформаторами 48 і 51 та діодними мостами 49 і 52 у живильну напругу для одновібраторів відповідно 50 і 53 вказаних вихідних модулів. Контролери 31 і 32 при установленні в робоче положення видають: - на свої треті виходи й далі через перший і другий входи вихідного модуля 34-1 на перший і другий входи формувача сигналів 38 імпульсні послідовності, які перетворюються відповідними імпульсними трансформаторами 48 і 51 і діодними мостами 49 і 52 у живильну напругу для одновібраторів відповідно 50 і 53 вихідного модуля 34-1; - на свої четверті виходи сигнали, що встановлюють у робочий стан відповідно мікропроцесори 42 і мікропроцесори 43 у вхідних модулях 35-1,…, 35-М, і мікропроцесори 36 і мікропроцесори 37 у вихідних модулях 34-1,…, 34-N, при цьому в кожному вхідному модулі 35-m на третіх виходах мікропроцесорів 42 і 43 установлюються нульові сигнали, а в кожному вихідному модулі 34-n мікропроцесор 36 видає на свої треті виходи нульові сигнали, що надходять на четверті входи свого формувача сигналів 38, а мікропроцесор 37 видає на свої треті виходи одиничні сигнали, що надходять на п'яті входи свого формувача сигналів 38, які перетворяться логічними елементами "Виключне АБО" 55-1, 55-2,…, 55-K у живильну напругу для одновібраторів 56-1, 56-2,…, 56-K відповідно; - одночасно на свої п'яті входи по одиночному імпульсі, яки надходить на перший і другий входи блока управління формувачами сигналів 33, що при їхньому збігу видає на свій четвертий вихід і далі на третій вхід формувача сигналів 38 вихідного модуля 34-1 імпульс запуску. Тому що на четвертих входах формувачів сигналів 38 перебувають нульові сигнали, то закриті елементи "І" 57-k і на виходах формувачів сигналів 38 перебувають також нульові сигнали, які проходять через модуль контролю 39 на його відповідні виходи й далі на входи блока узгодження 13, з виходів якого вони надходять у блок управління локальними об'єктами 14, на виходах якого відсутні команди керування. При надходженні імпульсу запуску на третій вхід до формувача сигналів 38 модуля 34-1 формувач імпульсу 45 по його передньому фронту видає імпульс, що надходить на перший вхід одновібратора 50 і цим запускає в роботу ланцюг своїх послідовно включених одновібраторів 50, 53, 56-1, 56-2,…, 56-K модуля 34-1, кожний з яких спрацьовує по задньому фронту імпульсу, що надійшов на його вхід. Крім того, імпульс із виходу 17 формувача імпульсів 45 надходить на імпульсний трансформатор 46 і далі на діодний міст 47, формуючи живильну напругу, що проходить на десятий вихід формувача сигналів 38 вихідного модуля 34-1 і далі на сьомий вхід формувача сигналів 38 наступного вихідного модуля, у цьому випадку, модуля 34-2, у якому аналогічно спрацьовує його формувач імпульсів 45, запускаючи ланцюг своїх послідовно включених одновібраторів 50, 53, 56-1, 56-2,…, 56-K, і імпульсний трансформатор 46 і діодний міст 47, які формують напругу живлення, що надходить на десятий вихід формувача сигналів 38 вихідного модуля 34-2 і далі на сьомий вхід формувача сигналів 38 наступного вихідного модуля. Далі послідовно аналогічно спрацьовують і формувачі 45 кожного з наступних вихідних модулів 34-3,…, 34-N, запускаючи ланцюг своїх послідовно включених одновібраторів 50, 53, 56-1, 562,…, 56-K і формуючи живильну напругу, що проходить на десятий вихід формувача сигналів 38 даного вихідного модуля та на сьомий вхід наступного вихідного модуля, за винятком модуля 34-N. Напруга з десятого виходу вихідного модуля 34-N надходить на третій вхід блока управління формувача сигналів 33, що формує та передає контролерам 31 і 32 інформацію про нормальну роботу ланцюга формувачів сигналів 38 вихідних модулів 34-1,…, 34-N, і на сьомий вхід формувача сигналів 38 вихідного модуля 34-1, як напруга живлення формувача імпульсів 45, що тепер і далі спрацьовує від імпульсу з виходу свого одновібратора 56K (тобто з виходу одновібратора 56-K вихідного модуля 34-1). Аналогічно й формувачі 45 всіх інших вихідних модулів 34-2,…, 34-N починають працювати від імпульсу з виходу свого одновібратора 56-K. На виходах формувача сигналів 38 всіх вихідних модулів 34-1…… 34-N відсутні сигнали керування, тому що на їхніх четвертих входах перебувають нульові сигнали (відсутні сигнали керування локальними об'єктами) з виходів мікропроцесорів 36 і 37. У формувачів сигналів 38 кожного вихідного модуля 34-n параметри ланцюга, що складається з імпульсного трансформатора 46 і діодного мосту 47, вибрані такими, щоб після надходження імпульсу з виходу формувача імпульсів 45 на вхід імпульсного трансформатора 46 періодичний загасаючий процес у цьому ланцюзі забезпечував на першому вході (вході живлення) формувача 45 наступного вихідного модуля 34-(n+1) рівень напруги, достатній для роботи формувача 45 протягом часу, більшого, ніж час однократного спрацьовування ланцюга послідовно включених одновібраторів 50, 53, 56-1, 56-2,…, 56-K - tц, але меншого, ніж чac 1,5 tц. Збір даних про стан локальних об'єктів виконавчими блоками 10 і 11. Контролери 31 і 32 обох блоків 10 і 11 під час збору даних про стан локальних об'єктів 17 працюють однаково і у кожному програмному циклі здійснюють: - формування і передачу на вхідні модулі 351,…, 35-М команд на збір даних про стан локальних об'єктів (прямих і інверсних інформаційних посилок), згідно з закладеними алгоритмами; 67647 18 - отримання інформаційних посилок від вхідних модулів 35-1, …. 35-М і перетворення посилок у дані про поточний стан локальних об'єктів; - порівняння даних отриманих контролером 31 і отриманих контролером 32; - запис отриманих даних в пам'ять контролерів 31 і 32; - формування та передачу інформаційних посилок про стан локальних об'єктів 17 у комунікаційні комп'ютери 6 і 7 і далі на АРМ ДСП 1, на АРМ ШН 2 і на блок підключення 5. Як вказано вище, на всіх виходах блока контролю об'єктів 9 є сигнали "1" або "0", що надходять у блок узгодження 13, у якому здійснюється їхня гальванічна розв'язка й узгодження за рівнем і по потужності із входами виконавчого блока 10 (11), на які вони надходять. Таким чином, у виконавчому блоці 10 (11) на його третіх входах і на перших входах кожного вхідного модуля 35-m, та, відповідно, на других входах його модуля контролю перетворювача вхідних сигналів 40 перебувають сигнали стану всіх локальних об'єктів, контрольованих цим вхідним модулем. Кожний із цих сигналів проходить через модуль контролю перетворювача вхідних сигналів 40 на його відповідний вихід (один із других входів - відповідний одному з четвертих виходів) і далі на відповідний вхід перетворювача вхідних сигналів 41 (один із перших входів), при цьому на один відповідний вихід його, наприклад, з других виходів, видається вихідний сигнал у прямому вигляді (відповідному вхідному сигналу), а на інший відповідний вихід, один з третіх виходів - в інверсному вигляді (відповідному інверсії вхідного сигналу). Для одержання даних про стан локальних об'єктів, підключених до вхідних модулів 35-1,…, 35-М, контролери 31 і 32 у початку кожного свого циклу роботи подають команду на видачу даних у вигляді прямої і інверсної інформаційних посилок на другий і третій входи вхідних модулів і далі на другі мікропроцесорів 42 і 43 цих модулів. Мікропроцесори 42 і 43 кожного вхідного модуля перевіряють збіг одержаних інформаційних посилок і, якщо вони збіглися, то перевіряють правильність роботи ланцюгів перетворення вхідних сигналів. Для цього мікропроцесори 42 і 43 перевіряють наявність взаємно інверсних сигналів на відповідних других і третіх виходах перетворювача 41. Після цього подають одночасно сигнали на перший і третій входи модуля контролю перетворювача вхідних сигналів 40, одержавши які модуль 40 короткочасно, наприклад, на час 10 мс, змінює значення своїх одиничних вихідних сигналів на протилежні, відповідно на протилежне змінюються значення сигналів на виходах перетворювача вхідних сигналів 41. Мікропроцесори 42 і 43 фіксують відбулася чи ні зміна значення сигналів на їхніх входах і, якщо відбулася, то вважається, що тестування вхідного модуля пройшло успішно. Після закінчення перевірки роботи перетворювача 41 мікропроцесори 42 і 43 вхідного модуля 35-m перетворюють паралельний код стану локальних об'єктів 17, підключених до даного вхідного модуля в пряму (мікропроцесор 42) і інверсну (мікропроцесор 43) посилки, які передають у контролери 19 31 і 32 по відповідних каналах послідовної передачі даних. Контролери 31 і 32, одержав пряму і інверсну інформаційні посилки від кожного вхідного модуля, перевіряють їх відповідність, перетворюють їх у дані про поточний стан локальних об'єктів, при цьому контролер 31 формує і запам'ятовує одержані дані у прямому вигляді, а контролер 32 формує і запам'ятовує одержані дані у інверсному вигляді, а, так як блоки 10 і 11 працюють однаково і одночасно, то у контролерах 31 і 32 другого виконавчого блока також знаходяться дані про поточний стан локальних об'єктів відповідно у прямому і у інверсному вигляді. У випадку невідповідності результатів порівняння, одержаних мікропроцесорами 42 і 43 одного з блоків інформаційних посилок, або невідповідності результатів порівняння вхідних сигналів на виході перетворювача 41, або при негативному результаті тестування мікропроцесори 42 і 43 переходять у захисну відмову - не здійснюють передачу даних до відповідних контролерів 31 і 32. Контролери 31 і 32, не одержав у встановлений час, дані про стан локальних об'єктів, переходять у "захисний стан" (режим "захисна відмова") - припиняють свою циклічну роботу й не передають на комунікаційні комп'ютери 6 і 7 сигнал наявності зв'язку, що фіксується ними як "втрата зв'язку" і оперативному персоналу видається сигнал для вживання необхідних заходів. Керування локальними об'єктами виконавчими блоками 10 і 11. Контролери 31 і 32 під час виконання керування локальними об'єктами залізничної автоматики та телемеханіки здійснюють: - отримання даних про керування локальними об'єктами від АРМ ДСП 1 або від операторів більш високого рівня через комунікаційні комп'ютери 6 і 7; - аналіз і обробку отриманих команд; - формування та видачу команд на переведення у необхідне положення конкретних локальних об'єктів; - формування згідно з закладеними алгоритмами прямих і інверсних інформаційних посилок, відповідних отриманим командам, які передаються на вихідні модулі 34-1,…, 34-N; - формування й передачу на комунікаційні комп'ютери 6 і 7 і далі на АРМ ДСП 1, на АРМ ШН 2 і на блок підключення 5 інформаційних посилок про видачу команд керування на локальні об'єкти. При одержанні даних про керування локальними об'єктами - інформаційних посилок від комунікаційних комп'ютерів 6 і 7 (які формуються ними на основі інформаційних посилок від АРМ ДСП 1 або від операторів верхнього рівня через блок підключення 5) контролери 31 і 32 порівнюють прийняті коди. При позитивному результаті порівняння контролери 31 і 32 запам'ятовують і аналізують отриману команду. Якщо, наприклад, це команда керування окремим об'єктом (наприклад, на переведення об'єкту у протилежний стан), то контролери 31 і 32 у циклі роботи, після одержання команди, перетворюють паралельний код команди у пряму й інверсну інформаційні посилки, що відповідають прийнятій команді, і передають 67647 20 кожну з них у відповідний мікропроцесор 36 і 37 відповідного вихідного модуля, одного з 34-1,…, 34-N. Мікропроцесори 36 і 37, після отримання команди на управління локальним об'єктом 17 - інформаційних посилок (відповідно прямої або інверсної) від відповідних контролерів 31 і 32 по каналах послідовної передачі даних, здійснюють перетворення цих посилок у паралельний код керування, запам'ятовують його, порівнюють результати перетворення, виконують тестування формувача сигналів 38. Для тестування мікропроцесори 36 і 37 формують на своїх третіх виходах тестові сигнали (короткочасна зміна рівня вихідного сигналу на протилежний), які надходять відповідно на четверті й п'яті входи формувача сигналів 38. Якщо формувач сигналів 38 працює правильно, то на його восьмих і дев'ятих виходах також змінюються сигнали на протилежні й модуль контролю 39 фіксує короткочасну зміну його вхідних сигналів керування та передає сигнали на свої п'яті та шості виходи й далі на другі входи мікропроцесорів 36 і 37, які фіксують ці сигнали як правильне завершення тестування. При відповідності результатів порівняння даних та позитивному результаті тестування мікропроцесори 36 і 37 видають на свої треті виходи й далі на четверті й п'яті входи формувача сигналів 38 паралельний код керування (на відповідних керованому об'єкту четвертому й п'ятому входах формувача сигналів 38 встановлюють відповідно значення одиничного й нульового сигналу), передають на контролери 31 і 32 інформаційну посилку підтвердження видачі команди керування і кожен мікропроцесор 36 і 37 запускає свій програмний таймер, який у наступних циклах встановлюється в попереднє положення при одержанні команди і знову запускається при виданні коду команди на входи формувача 38. У випадку невідповідності результатів порівняння вихідних сигналів мікропроцесорів 36 та 37 або негативному результаті тестування формувача сигналів 38 або при несвоєчасному надходженні команди і спрацюванні програмного таймера, мікропроцесори 36 і 37 не видають на свої треті виходи паралельний код керування та не передають сигнал підтвердження видачі команди керування на відповідні контролери 31 і 32, тобто мікропроцесори 36 і 37 переходять у "захисний стан" (режим "захисна відмова"). У випадку невідповідності результатів порівняння контролерами 31 та 32 прийнятих інформаційних посилок або неприйняття підтвердження видачі команди керування хоча б від одного з вихідних модулів 34-1,…, 34-N контролери 31 і 32 переходять у "захисний стан" (режим "захисна відмова") - припиняють свою циклічну роботу, установлюють на своїх третіх виходах нульовий сигнал, внаслідок чого припиняється робота формувачів сигналів 38 у вихідних модулях 34-1,…, 34-N, і не передають на комунікаційні комп'ютери 6 і 7 і далі на АРМ ДСП 1 і АРМ ШН 2 сигнал наявності зв'язку, що фіксується ними як "втрата зв'язку" і оперативному персоналу видається сигнал для вживання необхідних заходів. При переході 21 одного з виконавчих блоків 10 або 11 у режим "захисної відмови" мікропроцесорна централізація продовжує функціонувати з одним виконавчим блоком, а другій блок підключається до роботи після усунення несправності. Формувач сигналів 38 за допомогою елементів "Виключне АБО" 55-1, 55-2,…, 55-K порівнює прямій і інверсний сигнали керування відповідні кожному окремому об'єкту керування, які надійшли на його входи. Крім того, формувач 38 перетворює сигнал керування (одиничній сигнал, який надійшов на четвертий вхід формувача 38, і нульовий сигнал, який надійшов на п'ятий вхід формувача 38) з постійного в імпульсний, за допомогою відповідного одновібратора, одного з 56-1, 56-2,…, 56K, та відповідного елемента "І", одного з 57-1, 572,…, 57-K, а далі імпульсні сигнали керування за допомогою імпульсних трансформаторів 59-1, 592,…, 59-K і діодних мостів 60-1, 60-2,…, 60-K перетворюються у двополюсний сигнал керування. З виходів формувача сигналів 38 двополюсний сигнал керування об'єктами через модуль контролю 39 і шості та сьомі виходи виконавчого блока 10 (11) надходить у блок узгодження 13 і далі в типові схеми керування конкретними локальними об'єктами, які починають переводитися в необхідне положення. Формувачі сигналів 38 всіх вихідних модулів 34-1, 34-2,…, 34-N працюють у динамічному режимі та виконують контроль один одного. Взаємоконтроль формувачів сигналів 38 виконується таким чином. Якщо формувач сигналів 38 вихідного модуля, наприклад, 34-1 працює в динамічному режимі, тоді формується сигнал живлення для формувача сигналів 38 наступного вихідного модуля, у даному випадку 34-2, і так далі. Формувач сигналів 38 вихідного модуля 34-N формує сигнал живлення для формувача сигналів 38 вихідного модуля 34-1. Порушення в роботі хоча б одного формувача сигналів 38 у ланцюзі призведе до вимикання формувачів сигналів 38 всіх вихідних модулів 34-1, 34-2,…, 34-N, а це призведе до вимикання сигналів керування, що видаються на локальні об'єкти (захисний стан системи). Таким чином, формувачі сигналів 38 всіх вихідних модулів 34-1, 34-2,…, 34N припинять роботу та вимкнеться сигнал керування на локальні об'єкти 17. Далі у кожному з циклів, що наступні після циклу, у якому вперше одержана команда керування, в контролери 31 і 32 надходить інформація про стан об'єкта керування і вони аналізують встановився об'єкт керування у необхідний стан чи ні, якщо він не встановився у необхідний стан, то контролери 31 і 32 видають команду керування на об'єкт, а якщо об'єкт встановився в необхідний стан, то контролери 31 і 32 припиняють видачу команди. Процес встановлення об'єкта у необхідний стан закінчився і код цей команди керування стирається у пам'яті контролерів 31 і 32. Якщо ж прийнята контролерами 31 і 32 команда є командою на установку маршруту, то відповідно до закладених логічних залежностей вони визначають по таблиці маршрутів локальні об'єкти, які входять у встановлюваний маршрут, їхні положення та порядок переведення в необхідне поло 67647 22 ження. Далі контролери 31 і 32 формують і передають інформаційні посилки у відповідні вихідні модулі 34-1, 34-2,…, 34-N на керування необхідними локальними об'єктами так, як описано вище. Мікропроцесорна централізація працює в такий спосіб. Мікропроцесорна централізація призначена для керуванням рухом поїздів на станціях магістрального й промислового залізничного транспорту та метрополітену, яке виконується шляхом установлення маршрутів руху поїздів в межах станції, прийому та відправлення поїздів за межі станції. Вона забезпечує виконання наступних функціональних операцій: - збір інформації про стан локальних об'єктів залізничної автоматики і телемеханіки, - операції керування, наприклад такі, як установлення маршруту, контроль руху поїзда по маршруті й розмикання маршруту, роздільне керування локальними об'єктами, - операції ув'язки із зовнішніми об'єктами (наприклад, при прийманні поїзда з перегону та відправки на перегін. На підставі інформації про стан локальних об'єктів та відповідних команд від чергового по станції або від операторів більше високого рівня мікропроцесорна централізація реалізує команди за технологічними алгоритмами централізованого керування об'єктами залізничної автоматики і телемеханіки, При цьому одночасно з виконанням технологічних алгоритмів виконується самоконтроль та самотестування стану технічних засобів централізації. Уведення в роботу системи мікропроцесорної централізації здійснюється після включення живлення. Включення в роботу комп'ютерів 18 і 19 АРМ ДСП 1 проводиться по команді чергового по станції за стандартними алгоритмами включення комп'ютерів. Включення інших пристроїв мікропроцесорної централізації виконує електромеханік по інструкції виготовлювача. Для забезпечення необхідного рівня надійності мікропроцесорної централізації передбачене резервування каналів передачі даних про стан локальних об'єктів автоматики й телемеханіки й каналів передачі керуючої інформації, тому основні елементи, що входять до складу мікропроцесорної централізації - комп'ютери 18 і 19 АРМ ДСП 1, комутатори 3 і 4, комунікаційні комп'ютери 6 і 7, комутатори 27, 29 і 28, 30 кільцевої мережі 8 і виконавчі блоки 10 і 11, перебувають у робочому стані. При передачі інформації про стан локальних об'єктів 17, наприклад, з перших входів-виходів виконавчого блока 10 інформаційна посилка надходить на треті входи-виходи кільцевої мережі 8 і проходить на перші й на другі входи-виходи кільцевої мережі 8 і на треті входи-виходи комунікаційних комп'ютерів 6 і 7, відповідно, які їх обробляють і запам'ятовують, далі кожний з комунікаційних комп'ютерів 6 і 7 формує інформаційну посилку в АРМ ДСП 1 й через свої перші входи-виходи передає її на четверті входи-виходи, відповідно, комутаторів 3 і 4, з других входіввиходів яких кожна інформаційна посилка надходить, відповідно, на треті й на четверті входивиходи АРМ ДСП 1 і далі в комп'ютери 18 і 19, від 23 повідно, потім кожний з комунікаційних комп'ютерів 6 і 7 формує інформаційну посилку в диспетчерську централізацію й через свої перші входи-виходи передає інформаційну посилку на четверті входивиходи комутаторів 3 і 4, відповідно, із третіх входів-виходів яких кожна інформаційна посилка надходить, відповідно, на перші й на другі входивиходи блока підключення 5 і далі в диспетчерську централізацію, а після цього комунікаційні комп'ютери 6 і 7 формують і через свої другі входивиходи передають інформаційні посилки на другі й треті входи-виходи АРМ ШН 2, який за допомогою комутатора 20 посилає інформаційні посилки про стан локальних об'єктів через свої перші входивиходи на треті входи-виходи блока підключення 5 і далі черговому інженерові СЦБ дистанції сигналізації й зв'язку. В АРМ ДСП 1 інформаційні посилки обробляються й дешифруються й стан об'єктів автоматики й телемеханіки виводиться на монітор чергового по станції. Аналогічно проходять інформаційні посилки й із других входів-виходів виконавчого блока 10 і з перших і других входів-виходів виконавчого блока 11. При подачі команди черговим по станції, наприклад з комп'ютера 18, інформаційні посилки з його перших і других входів-виходів надходять через перші і другі входи-виходи АРМ ДСП 1 на перші входи-виходи комутаторів 3 і 4 і з їхніх четвертих входів-виходів проходять на перші входивиходи комунікаційних комп'ютерів 6 і 7, які їх запам'ятовують. Далі один з комп'ютерів, наприклад 6, формує й передає інформаційну посилку через свої треті входи-виходи на перші входи-виходи кільцевої мережі 8 і з її третіх, четвертих, п'ятих і шостих входів-виходів інформаційна посилка, через відповідні входи-виходи виконавчих блоків 10 і 11, надходить на перші й другі входи-виходи контролерів 31 і 32 виконавчого блока 10 і на перші й другі входи-виходи контролерів 31 і 32 виконавчого блока 11, контролери 31 і 32 виконавчих блоків 10 і 11 обробляють посилки, що надійшли на його входи-виходи й на їхній основі формують команди керування локальними об'єктами 17. Аналогічно проходить команда при подачі її з комп'ютера 19 АРМ ДСП 1. Відмова будь-якого елемента або зв'язку в ланцюжку передачі інформації в одному або іншому напрямку не приводить ні до яких порушень у роботі мікропроцесорної сигналізації, вона продовжує функціонувати за рахунок резервного елемента або зв'язку. Наприклад: - при порушенні з'єднання між першими входами-виходами автоматизованого робочого місця чергового по станції 1 та першими входамивиходами комутатора 3, другий комутатор 4, за рахунок з'єднання між другими входами-виходами АРМ ДСП 1 і першими входами-виходами другого комутатора 4 та з'єднання між п'ятими входамивиходами першого і другого комутаторів 3 і 4 виконує обмін даними між першим комп'ютером 18 та двома комунікаційними комп'ютерами 6 і 7; - при відмові одного з комутаторів 3 і 4, наприклад комутатора 3, за рахунок з'єднання між другими входами-виходами АРМ ДСП 1 і першими 67647 24 входами-виходами другого комутатора 4, він виконує обмін даними між першим комп'ютером 18 та комунікаційним комп'ютером 7, в цьому випадку обмін даними між АРМ ДСП 1 та двома виконавчими блоками 10 і 11 забезпечується тільки за допомогою одного комунікаційного комп'ютера 7; - при порушенні з'єднання четвертих входіввиходів першого комутатора 3 з першими входами-виходами першого комунікаційного комп'ютера 6 або відмови першого комунікаційного комп'ютера 6, або порушенні з'єднання між третіми входамивиходами першого комунікаційного комп'ютера 6 з першими входами-виходами кільцевої мережі 8 обмін даними між АРМ ДСП 1 та двома виконавчими блоками 10 і 11 здійснюється за допомогою комунікаційного комп'ютера 7 та комутаторів 27-30 кільцевої мережі 8; - при виникненні порушення в кільцевій мережі 8, наприклад, з'єднання між другими входамивиходами комутатора 27 та першими входамивиходами комутатора 29 або між другими входами-виходами комутатора 28 та першими входамивиходами комутатора 30 обмін даними між двома комунікаційними комп'ютерами 6 і 7 та виконавчими блоками 10 і 11 виконується за рахунок з'єднань між третіми входами-виходами комутаторів 27 і 28 та четвертими входами-виходами комутаторів 29 і 30; - при відмові комутатора 27 кільцевої мережі 8 обмін даними забезпечується тільки між комунікаційним комп'ютером 7 та виконавчими блоками 10 і 11 за допомогою комутаторів 28, 29 і 30 кільцевої мережі 8; - при відмові або переході в захисний стан виконавчого блока 10 або відмові комутатора 29 кільцевої мережі 8, або порушенні з'єднання, між третіми входами-виходами кільцевої мережі 8 та першими входами-виходами виконавчого блока 10, або четвертими входами-виходами кільцевої мережі 8 та другими входами-виходами виконавчого блока 10 призведе до того, що інформацію в комунікаційні комп'ютери буде передавати і приймати від них тільки виконавчий блок 11. Виникнення цих та аналогічних порушень або відмов виявляється елементами централізації і інформація про це передається в АРМ ДСП 1 і АРМ ШН 2 для прийняття заходів по їх усуненню. Робота мікропроцесорної централізації. У початковому положенні при відсутності керування локальними об'єктами залізничної автоматики і телемеханіки мікропроцесорна централізація здійснює циклічний збір інформації про стан локальних об'єктів 17 залізничної автоматики і телемеханіки. Збір інформації здійснюється в такий спосіб. Блок контролю об'єктів 9 безупинно відслідковує положення локальних об'єктів 17 залізничної автоматики і телемеханіки за допомогою типових схем контролю. На всіх виходах блока контролю об'єктів 9 є сигнали "1" або "0", що надходять у блок узгодження 13, у якому здійснюється їхня гальванічна розв'язка й узгодження за рівнем і по потужності із входами виконавчого блока 10 (11), на які вони надходять. Таким чином, у виконавчому блоці 10 (11) на його третіх входах і на входах 25 кожного вхідного модуля 35-m перебувають сигнали стану всіх локальних об'єктів, контрольованих цим вхідним модулем. Кожний виконавчий блок 10 і 11 на початку циклу роботи, як описано вище, збирає, формує й запам'ятовує інформацію про стан локальних об'єктів 17, після закінчення збору в контролерах 31 обох виконавчих блоків 10 і 11 записана інформація про стан локальних об'єктів у прямому вигляді, а в контролерах 32 обох виконавчих блоків записана інформація про стан локальних об'єктів в інверсному вигляді. У кожному циклі роботи виконавчих блоків 10 і 11 у комунікаційні комп'ютери 6 і 7 передається інформація тільки з одного контролера одного виконавчого блока, а з інших контролерів 31 і 32 виконавчих блоків 10 і 11 передача інформації здійснюється в наступних циклах роботи. Тобто, наприклад, у даному циклі роботи виконавчих блоків 10 і 11 передана інформація з контролера 31 виконавчого блока 10, тоді в наступному циклі буде передана інформація з контролера 32 виконавчого блока 10, далі з контролера 31 виконавчого блока 11, потім з контролера 32 виконавчого блока 11 і після цього знову з контролера 31 виконавчого блока 10 і так далі. Таким чином, з одного контролера інформація буде передаватися із циклом тривалістю 400 мс. При передачі інформації контролер виконавчого блока формує інформаційну посилку, що через кільцеву мережу 8 надходить у комунікаційні комп'ютери 6 і 7, які перевіряють отримані посилки, порівнюють отриману інформацію про стан локальних об'єктів з інформацією, що зберігається в них, і, якщо відбулася зміна стану, то записують отриману інформацію у пам'ять. З комунікаційних комп'ютерів 6 і 7 в АРМ ДСП 1, АРМ ШН 2 і в блок підключення 5 передається інформація із циклом тривалістю 500 мс, при цьому передається та інформація, що прийшла останньої, тобто в АРМ ДСП 1, АРМ ШН 2 і в блок підключення 5 із циклом 500 мс будуть послідовно надходити інформація 3 контролера 31 виконавчого блока 10, з контролера 32 виконавчого блока 10, контролера 31 виконавчого блока 11 і з контролера 32 виконавчого блока 11 і після цього знову з контролера 31 виконавчого блока 10. При передачі інформації кожний комунікаційний комп'ютер 6 і 7 формує й посилає інформаційні посилки, які через комутатори 3 і 4 надходять в АРМ ДСП 1, в АРМ ШН 2 і через блок підключення 5 в диспетчерську централізацію. В АРМ ДСП 1 і в АРМ ШН 2 інформаційна посилка обробляється й інформація про стан локальних об'єктів запам'ятовується й виводиться черговому по станції й черговому електромеханіку відповідно, в АРМ ШН 2, крім того, отримана інформація аналізується, з метою виявлення несправностей апаратури й збоїв у роботі. Установка маршруту по прийому поїзда на станцію. Для установки маршруту черговий по станції на моніторі АРМ ДСП 1 формує команду - указує початок маршруту - вхідний світлофор і кінець маршруту, наприклад, вихідний світлофор з колії прийому/відправлення. 67647 26 Уведена черговим по станції в АРМ ДСП 1 команда керування, згідно з закладеними алгоритмами, перетворюється у інформаційну посилку, яка містить код маршруту й адресу пристрою, до якого направляється команда, у даному випадку, це адреса комунікаційних комп'ютерів 6 і 7. Інформаційна посилка надходить на входи комутаторів 3 і 4 та передається на обидва комунікаційні комп'ютери 6 і 7. Комунікаційні комп'ютери 6 і 7 перетворюють інформаційну посилку в дані про команду, протоколюють та транслюють, додаючи адресу виконавчих блоків 10 або 11, та передають інформаційну посилку через кільцеву мережу 8 у виконавчі блоки 10 і 11. У кожному з виконавчих блоків 10 і 11 інформаційну посилку перетворюють в паралельний код, відповідно до закладених логічних залежностей і по таблиці маршрутів визначають локальні об'єкти, які входять у встановлюваний маршрут, їхні положення та порядок переведення в необхідне положення. Далі, у відповідності з порядком переведення локальних об'єктів і їх станом, формують сигнали керування, які передаються в блок узгодження 13. З блока узгодження 13 сигнали керування надходять у блок управління локальними об'єктами 14 на типові схеми безпечного керування конкретними локальними об'єктами, які і установлюють відповідні локальні об'єкти 17 у необхідні положення. Установку локальних об'єктів 17 у необхідні положення контролюють за допомогою датчиків блока контролю об'єктів 9, сигнали з виходів якого отримують пристрої блока узгодження 13. У блоці узгодження 13 дані про стан локальних об'єктів залізничної автоматики і телемеханіки перетворюються в сигнали з параметрами необхідними для введення їх у виконавчі блоки 10 і 11. Сигнали, що отримані від блока узгодження 13, обробляються виконавчими блоками 10 і 11 та використовуються для контролю процесу установки локальних об'єктів 17 маршруту в необхідні положення і для відпрацьовування порядку установки локальних об'єктів 17 маршруту в необхідні положення, крім того з них формуються послідовності даних, яки виконавчі блоки 10 і 11 передають через кільцеву мережу 8 у комунікаційні комп'ютери 6 і 7, де протоколюють дані про об'єкти, стан яких змінився, та транслюють з додаванням адреса АРМ ДСП 1 і АРМ ШН 2 та блока підключення 5 і передають інформаційні посилки через комутатори 3 і 4 в блок підключення 5 та АРМ ДСП 1 і АРМ ШН 2 на комп'ютери 18, 19 і 21, де вони обробляються та виводяться на монітор для відображення стану локальних об'єктів залізничної автоматики і телемеханіки для чергового по станції та електромеханіка. Після установки усіх локальних об'єктів, що використовуються в маршруті, у необхідні положення виконавчий блок 10 (11) блокує (замикає) усі об'єкти, що входять у маршрут, і видає команду на включення вхідного світлофора. Використання в інших маршрутах локальних об'єктів установленого маршруту забороняється до використання маршруту або до його скасування по команді чергового по станції. Установка маршруту прийому поїзда закінчена. При вступі поїзда по сигналу вхідного світло 27 фора, що дозволяє рух поїзда, на першу ділянку шляху маршруту після світлофора й далі на інші колійні ділянки маршруту, виконавчий блок 10 (11) одержує інформацію від блока контролю локальних об'єктів 9 про послідовне заняття поїздом цих ділянок і послідовне звільненні цих ділянок після проходження поїзда по кожній колійній ділянки. Виконавчий блок 10 (11) фіксує інформацію про проходження поїзда по маршруту і, якщо поїзд займає й звільняє ділянки шляху відповідно до заданого маршруту, тоді після звільнення колійної ділянки маршруту виконавчий блок 10 (11) дозволяє використання звільненої колійної ділянки у других маршрутах (розмикання). Після прибуття поїзда на колію прийому дозволяється використання всіх колійних ділянок в інших маршрутах, крім тих, на яких перебуває поїзд. 67647 28 Якщо до появи поїзда виникне необхідність у використанні колійних ділянок, що входять у маршрут, в інших маршрутах, то черговий по станції повинен подати команду на скасування встановленого маршруту і, якщо на ділянці наближення відсутній потяг, то після встановлення на вхідному світлофорі червоного сигналу, що забороняє рух, виконавчий блок 10 (11) знімає заборону на використання ділянок, які входили у маршрут, а якщо на ділянці наближення є потяг, то на вхідному світлофорі встановлюється червоний сигнал, що забороняє рух, але виконавчий блок 10 (11) знімає заборону на використання ділянок, які входили у маршрут, через три хвилини. Далі черговий описаним вище способом установлює необхідний маршрут. 29 67647 30 31 67647 32 33 67647 34 Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem of microprocessor centralization
Автори англійськоюVyrostko Peter, Dolecek Jiri, Hubl Frantisek, Grbavcic Ondrej, Storek Vladimir, Nemeth Stefan, Basov Volodymyr Illich, Poliakov Petro Fedorovych, Shportko Volodymyr Pavlovych, Mihalco Martin
Назва патенту російськоюСистема микропроцессорной централизации
Автори російськоюВыростко Петро, Долечек Иржи, Губл Франтишек, Грбавчиц Ондржей, Шторек Владимир, Неметг Штефан, Басов Владимир Ильич, Поляков Петр Федорович, Шпортко Владимир Павлович, Мигалчо Мартин
МПК / Мітки
МПК: B61L 27/00
Мітки: система, мікропроцесорної, централізації
Код посилання
<a href="https://ua.patents.su/17-67647-sistema-mikroprocesorno-centralizaci.html" target="_blank" rel="follow" title="База патентів України">Система мікропроцесорної централізації</a>
Система відмовостійкого керування об`єктами
Номер патенту: 30708
Опубліковано: 11.03.2008
Автор: Кулік Анатолій Степанович
МПК: G06F 11/18
Мітки: керування, система, об'єктами, відмовостійкого
Формула / Реферат:
Система відмовостійкого керування об'єктами, яка має входи системи, виходи системи, об'єкт діагностування, аналізатор виду аварійної ситуації, формувач варіантів парирування, блок вибору процедури парирування, причому входи системи з'єднані з інформаційними входами об'єкта діагностування та з першою групою входів аналізатора виду аварійної ситуації, виходи об'єкта діагностування з'єднані з виходами системи та з другою групою входів...
Комплексна система управління та діагностики систем централізації і автоблокування на залізничному транспорті

Номер патенту: 66016
Опубліковано: 26.12.2011
Автори: Ковригін Михайло Олександрович, Уманський Дмитро Сергійович, Разгонов Адам Пантелейович
МПК: B61L 23/00
Мітки: автоблокування, система, діагностики, систем, централізації, управління, залізничному, комплексна, транспорті
Формула / Реферат:
Комплексна система управління і діагностики централізації і автоблокування на залізничному транспорті, що містить апаратуру центрального поста, електричної централізації лінійних пунктів і автоблокування сигнальних установок, каналоутворюючу апаратуру, яка відрізняється тим, що доповнена пристроями діагностування об'єктів централізації станцій і автоблокування диспетчерського круга, і автоматизованими робочими місцями АРМ для персоналу, що...
Система підвищення ефективності проведення багатофакторного експерименту
Номер патенту: 67529
Опубліковано: 27.02.2012
Автори: Костенко Олена Михайлівна, Цеховський Максим Володимирович, Кошовий Микола Дмитрович, Дергачов Володимир Андрійович
МПК: G06F 17/00
Мітки: проведення, експерименту, підвищення, ефективності, система, багатофакторного
Формула / Реферат:
Система підвищення ефективності проведення багатофакторного експерименту, що містить суматор, блок пам'яті, блок допускового контролю, керуючий вхід, виходи значень рівнів факторів, входи номера варіанта, причому входи номера варіанта з'єднані з першою групою входів суматора, виходи якого з'єднані з входами блока пам'яті, виходи блока пам'яті з'єднані з виходами значень рівнів факторів, яка відрізняється тим, що містить блок керування,...
Багатоканальна система контролю стану об’єкта
Номер патенту: 37759
Опубліковано: 10.12.2008
Автори: Бандура Іван Миколайович, Зимовін Анатолій Якович, Кірієнко Сергій Олександрович
МПК: G07C 5/00
Мітки: система, об'єкта, контролю, стану, багатоканальна
Формула / Реферат:
Багатоканальна система контролю стану об'єкта, яка містить блок датчиків, виходи яких через контролер з'єднані з блоком індикації, яка відрізняється тим, що в неї введені блок уставок, з'єднаний з контролером та блоком зв'язку, годинник реального часу, вихід якого з'єднаний з входом контролера, диспетчер, виходи якого з'єднані з входами контролера та блока зв'язку, блок архівації, входи якого з'єднані з виходами контролера та блока...
Система формування ієрархічного діагностичного забезпечення систем управління космічних апаратів

Номер патенту: 67038
Опубліковано: 25.01.2012
Автор: Кулік Анатолій Степанович
МПК: B64G 1/28
Мітки: систем, формування, система, забезпечення, діагностичного, космічних, апаратів, ієрархічного, управління
Формула / Реферат:
Система формування ієрархічного діагностичного забезпечення систем управління космічних апаратів, що містить блок приводів, блок датчиків, блок обчислювачів, причому виходи блока датчиків з'єднані з входами блока обчислювачів, виходи якого з'єднані з входами блока приводів, яка відрізняється тим, що містить блок діагностування системи, чотири блоки діагностичного забезпечення, блок діагностування місії, п'ять виходів діагностичної...
Попередній патент: Активно-реактивний артилерійський снаряд
Наступний патент: Модель процесу утворення вуглеводнів на землі
Випадковий патент: Світловипромінюючий пристрій