Пристрій з підйомними робочими майданчиками
Номер патенту: 80660
Опубліковано: 10.06.2013
Автори: Малюсейко Віктор Миронович, Калиниченко Владислав Васильович, Ранковський Сергій Віталійович, Моторін Артур Миколайович

Формула / Реферат
1. Пристрій з підйомними робочими майданчиками, що складається із опор, дзеркально закріплених на основі уздовж її подовжньої осі із заданим кроком одна щодо одної і з можливістю розміщення виробу між протилежними рядами опор, кареток зі змонтованими на них подовжніми робочими майданчиками, закріплених на опорах, механізмів для переміщення кареток у вертикальному напрямі, виконаних з приводами, відкидних поперечних робочих майданчиків і системи керування, виконаної з можливістю керування приводами згаданих механізмів, який відрізняється тим, що кожна каретка містить жорстко закріплену на ній нерухому платформу і рухому платформу, з'єднані між собою з можливістю переміщення рухомої платформи в горизонтальному напрямі за допомогою механізмів з приводами, подовжні робочі майданчики змонтовані на рухомих платформах, приводи механізмів для переміщення кареток у вертикальному напрямі змонтовані на верхніх частинах опор, відкидні поперечні робочі майданчики забезпечені механізмами з приводами для їх переміщення, а система керування виконана з можливістю керування приводами механізмів для переміщення рухомих платформ і механізмів для переміщення відкидних поперечних робочих майданчиків і блокування роботи приводів згаданих механізмів при нештатних режимах експлуатації.
2. Пристрій за пунктом 1, який відрізняється тим, що подовжні робочі майданчики виконані у вигляді секцій, змонтованих на рухомих платформах кареток, закріплених на трьох прилеглих опорах з кожної сторони від подовжньої осі основи, привід механізму для переміщення рухомих платформ в кожній секції змонтований на нерухомій платформі каретки, закріпленої на центральній опорі, і зв'язаний з рухомою платформою за допомогою рейкової передачі, рухомі платформи на каретках, закріплених на двох прилеглих опорах, зв'язані із згаданим приводом за допомогою валів, другі кінці яких закріплені на відповідних нерухомих платформах і зв'язані з рухомими платформами за допомогою рейкових передач, приводи механізмів для переміщення кареток у вертикальному напрямі з'єднані з каретками за допомогою вантажоносійних ланцюгів, відкидні поперечні робочі майданчики шарнірно з'єднані з подовжніми робочими майданчиками, а приводи для переміщення відкидних поперечних робочих майданчиків секцій виконані у вигляді лебідок.
3. Пристрій за пунктами 1 або 2, який відрізняється тим, що в зоні центральних опор встановлені трапи для підйому на подовжні робочі майданчики, центральні опори виконані із сходами, в кожній секції прилеглі подовжні робочі майданчики і відкидні поперечні робочі майданчики містять шарнірно з'єднані з ними відкидні трапи, згадані робочі майданчики виконані з настилами, огорожами, освітлювальними приладами і підводами пневматичних і електричних мереж, а огорожі подовжніх робочих майданчиків в зоні розташування трапів містять хвіртки, що закриваються.
4. Пристрій за пунктом 1, який відрізняється тим, що опори обладнані контактними і безконтактними індуктивними датчиками для контролю кінцевих положень кареток і натягнення вантажоносійних ланцюгів, каретки обладнані контактними індуктивними датчиками положення для контролю кінцевих положень рухомої платформи і оптичними датчиками для контролю положення подовжніх робочих майданчиків щодо виробу, подовжні робочі майданчики обладнані контактними індуктивними датчиками для контролю кінцевих положень відкидних поперечних робочих майданчиків, початкових положень хвірток в огорожі і відкидних сходів, приводи механізмів для переміщення кареток у вертикальному напрямі і механізмів для переміщення рухомої платформи в горизонтальному напрямі обладнані перетворювачами частоти з пристроями захисту, а система керування зв'язана із згаданими датчиками і перетворювачами частоти і виконана з можливістю керування приводами згаданих механізмів в напівавтоматичному режимі і автоматичної їх зупинки в кінцевих положеннях кареток при їх вертикальному переміщенні і рухомих платформ із змонтованими на них подовжніми робочими майданчиками при їх переміщенні в горизонтальному напрямі.
Текст
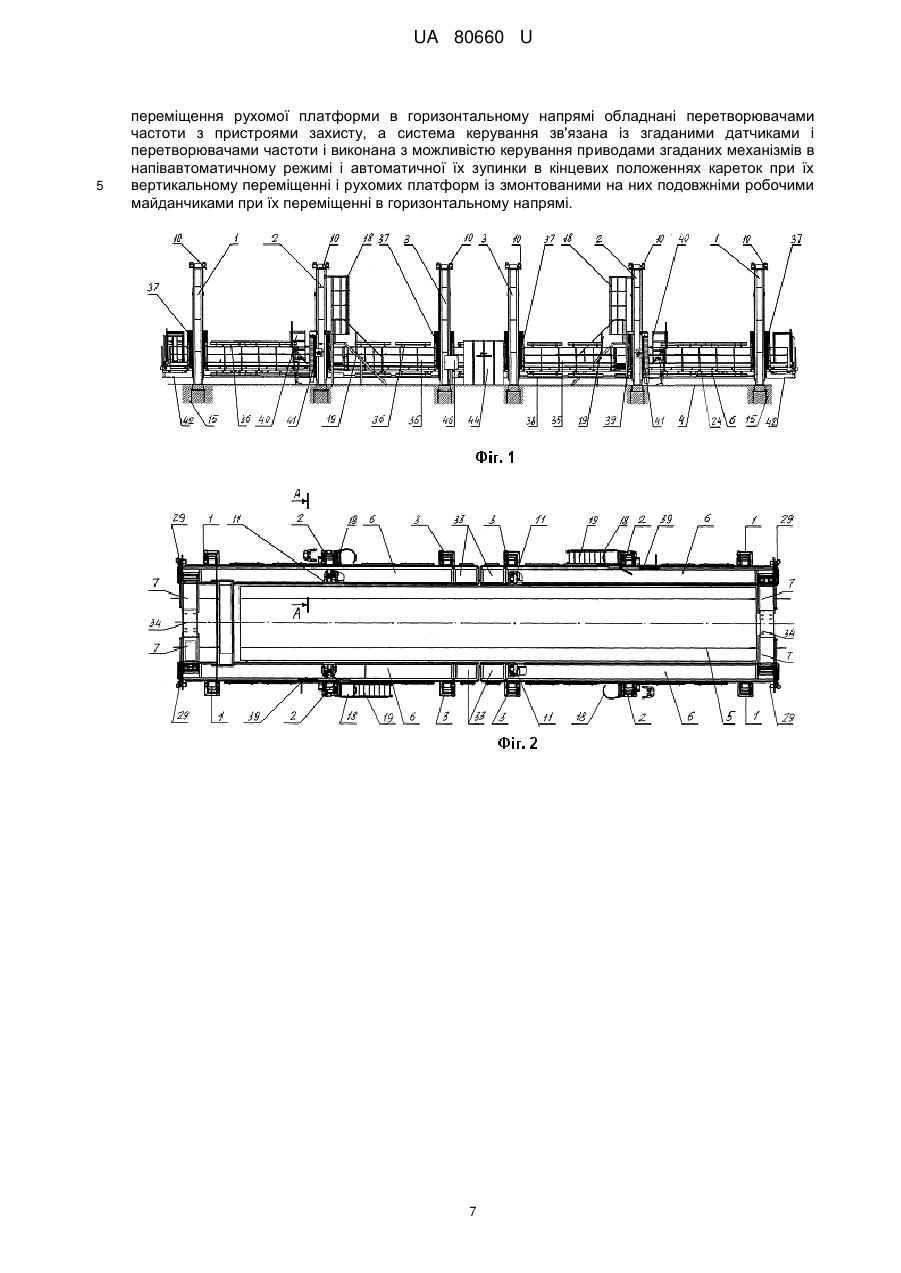
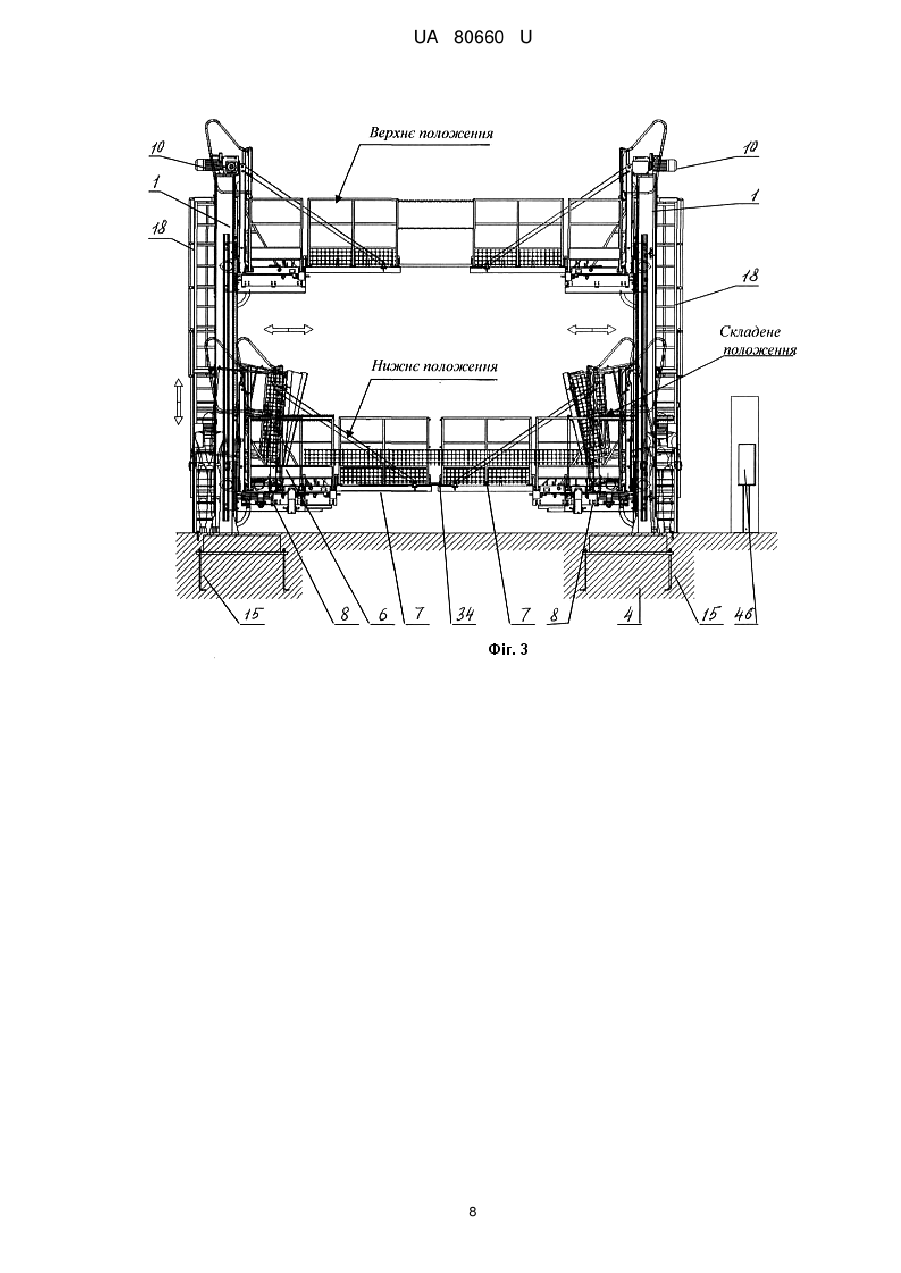
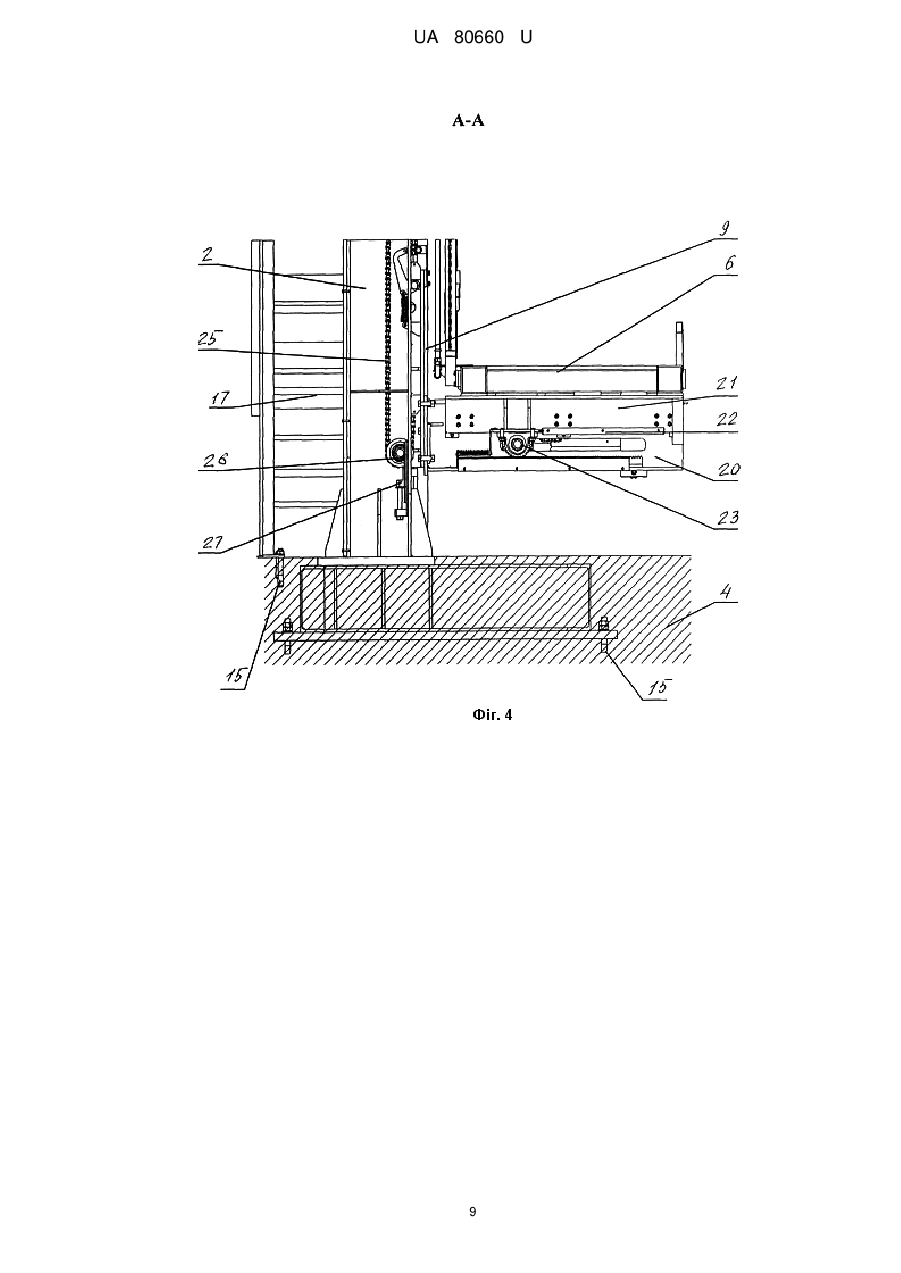
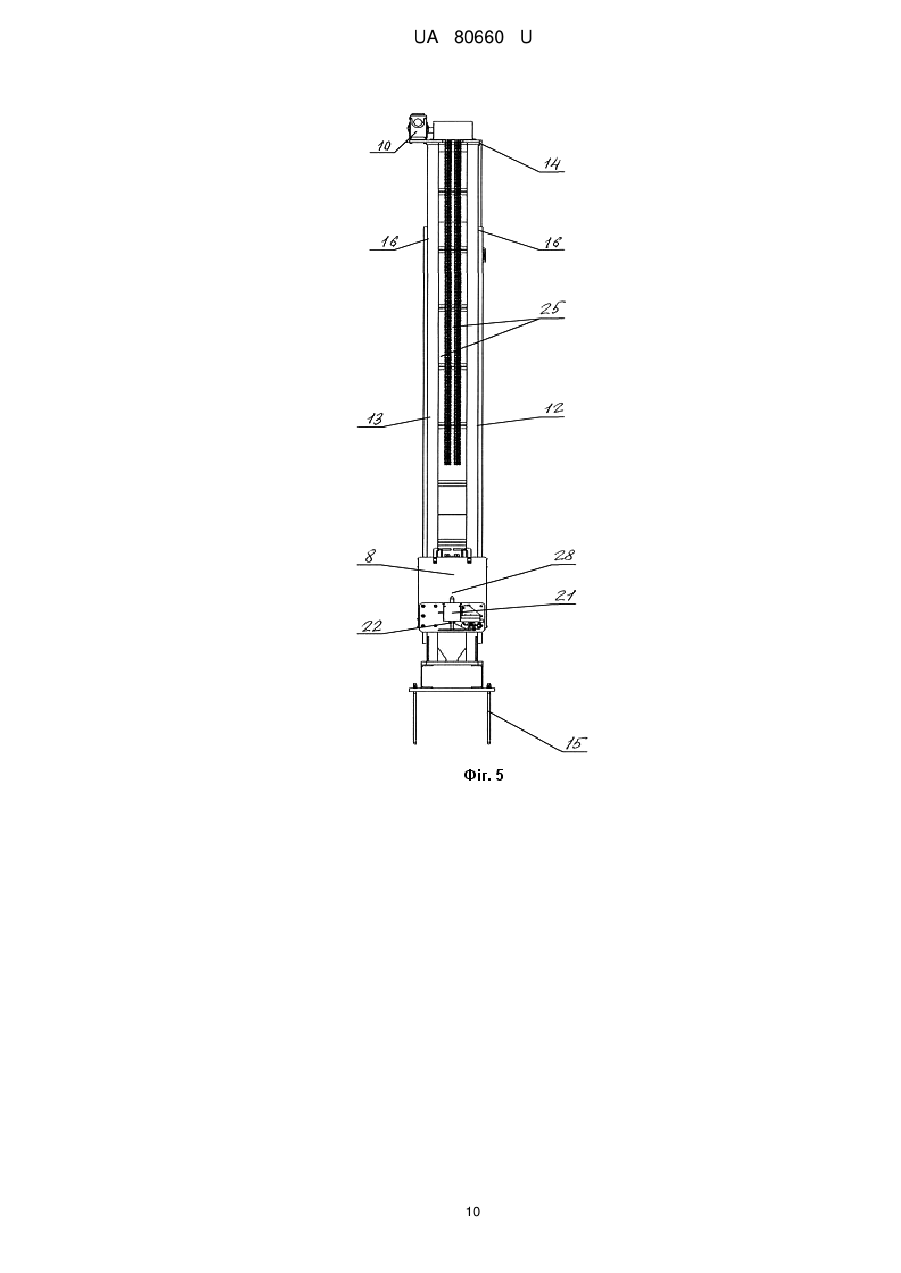
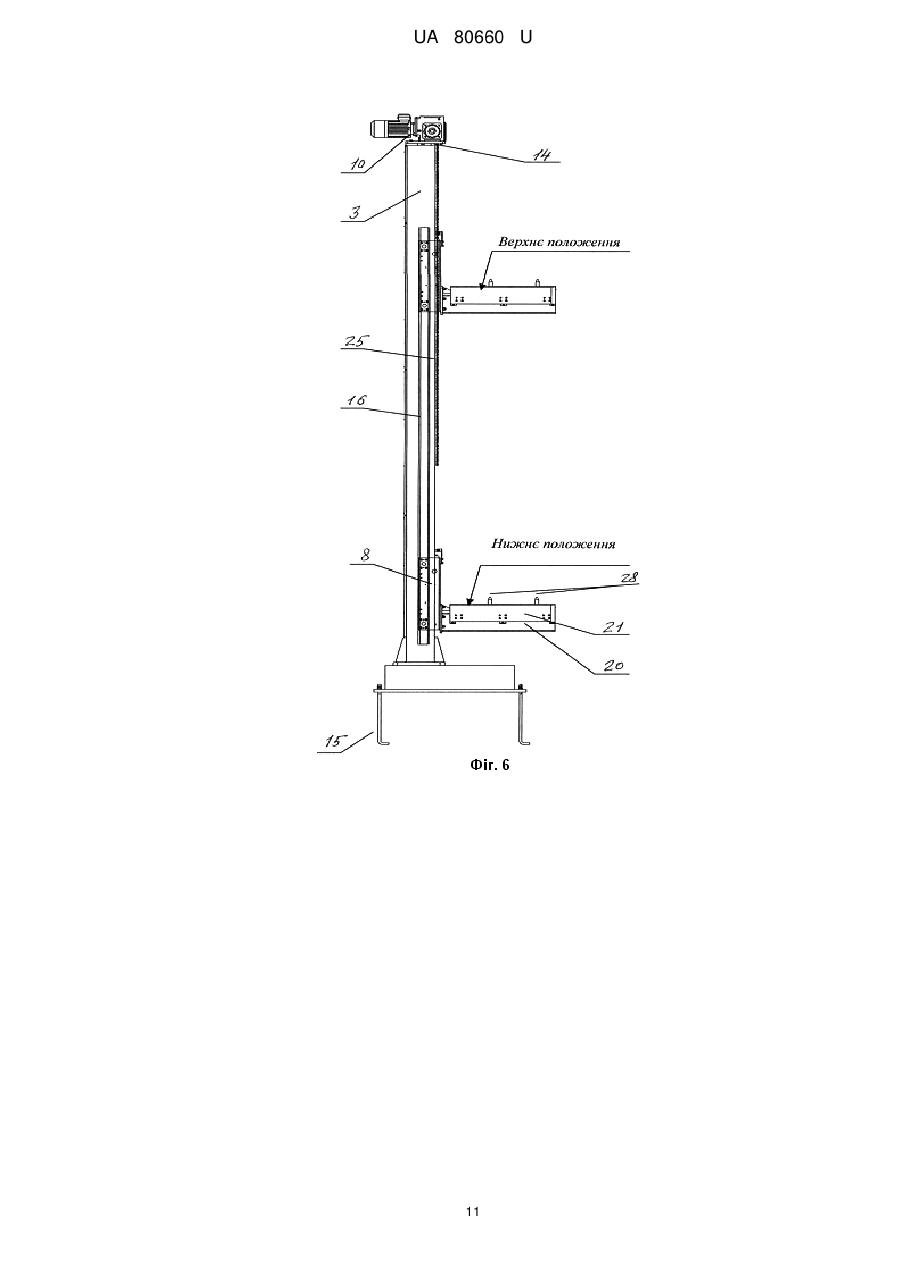
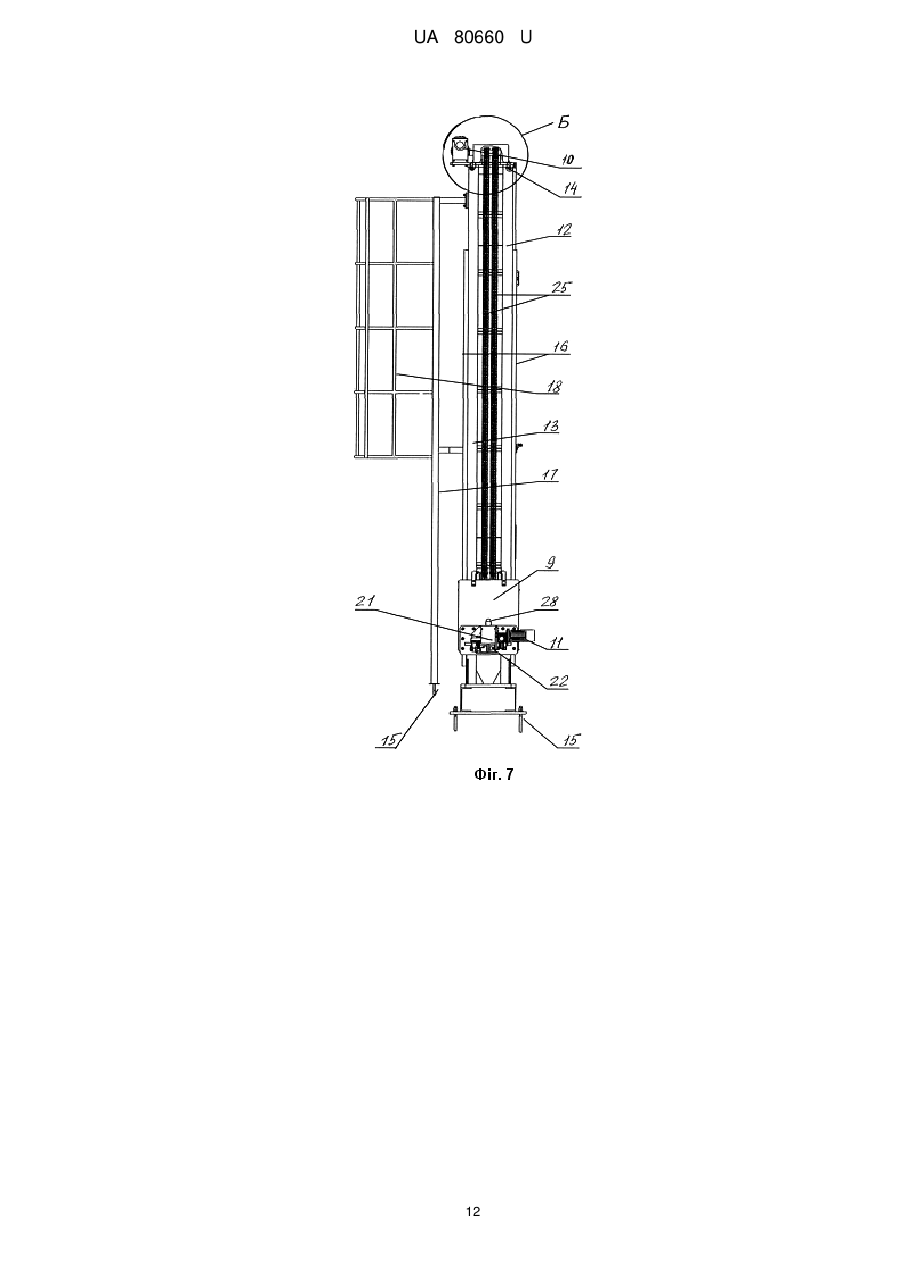
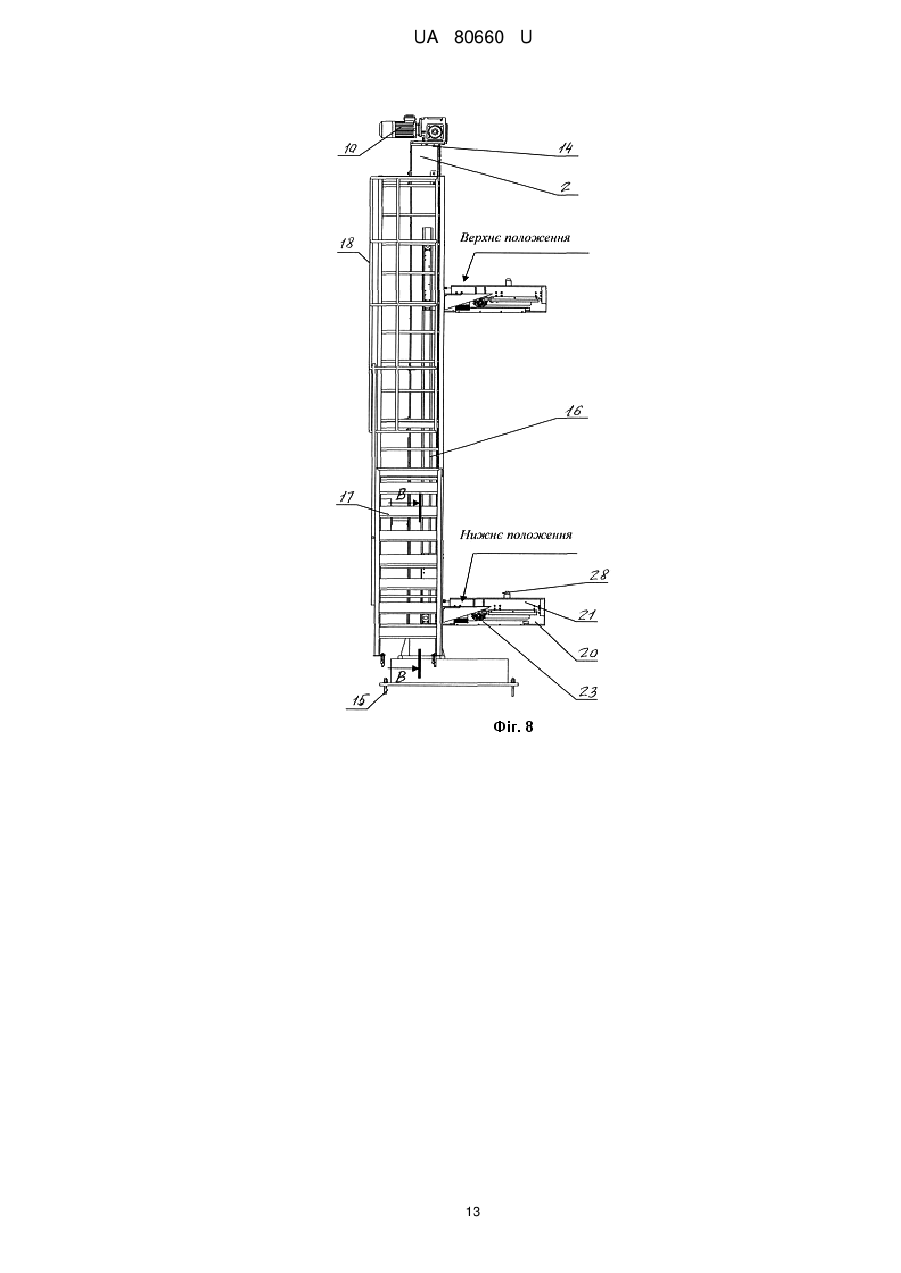
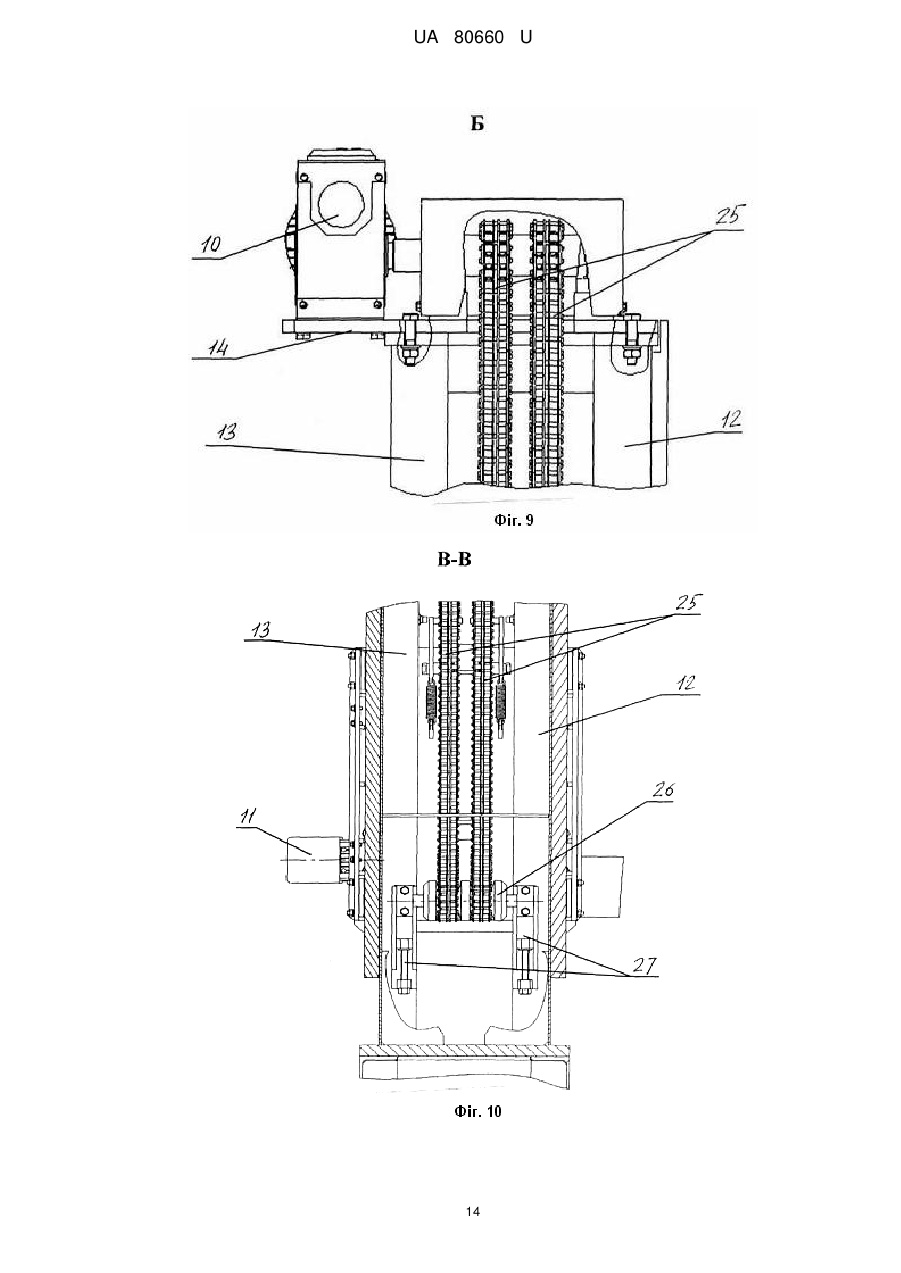
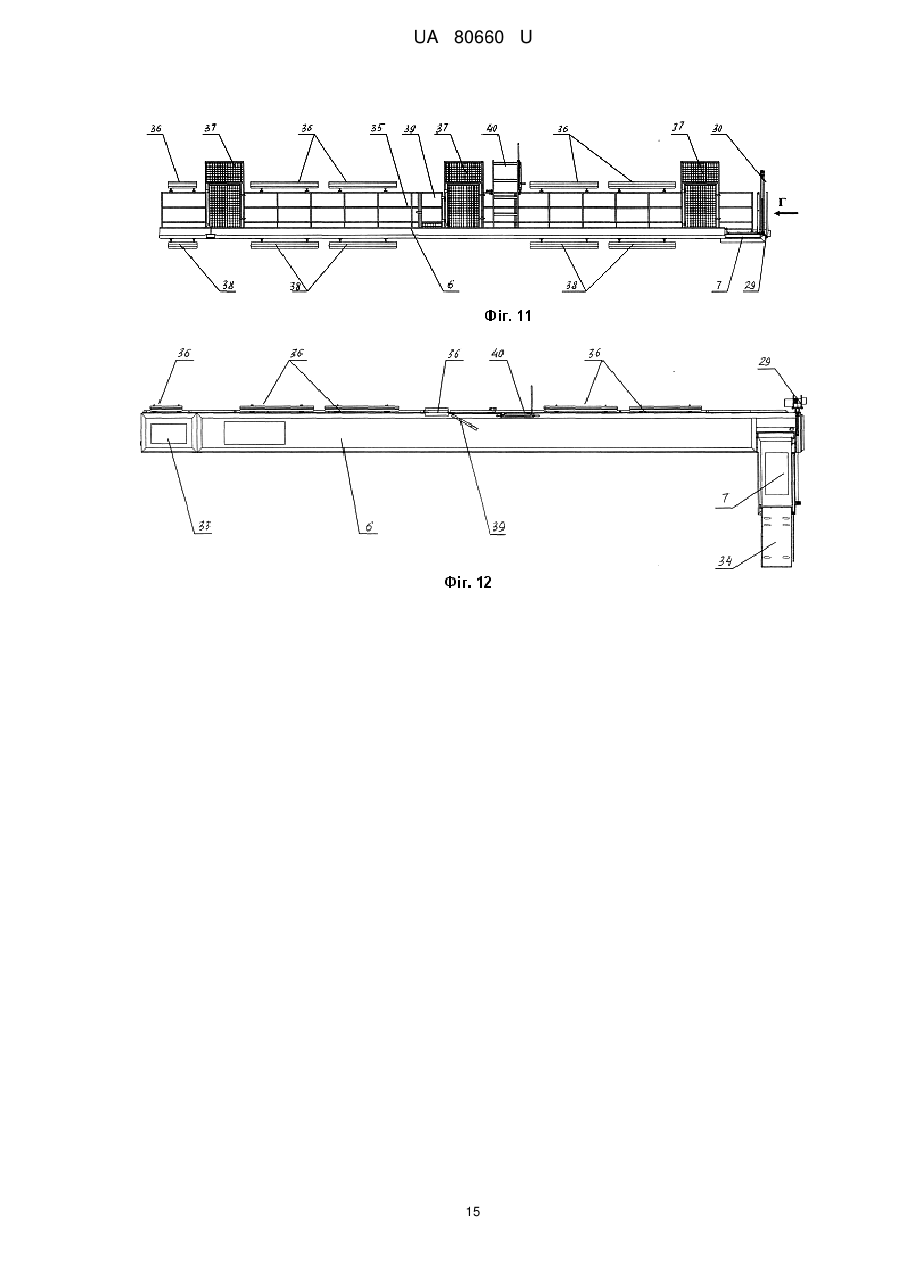
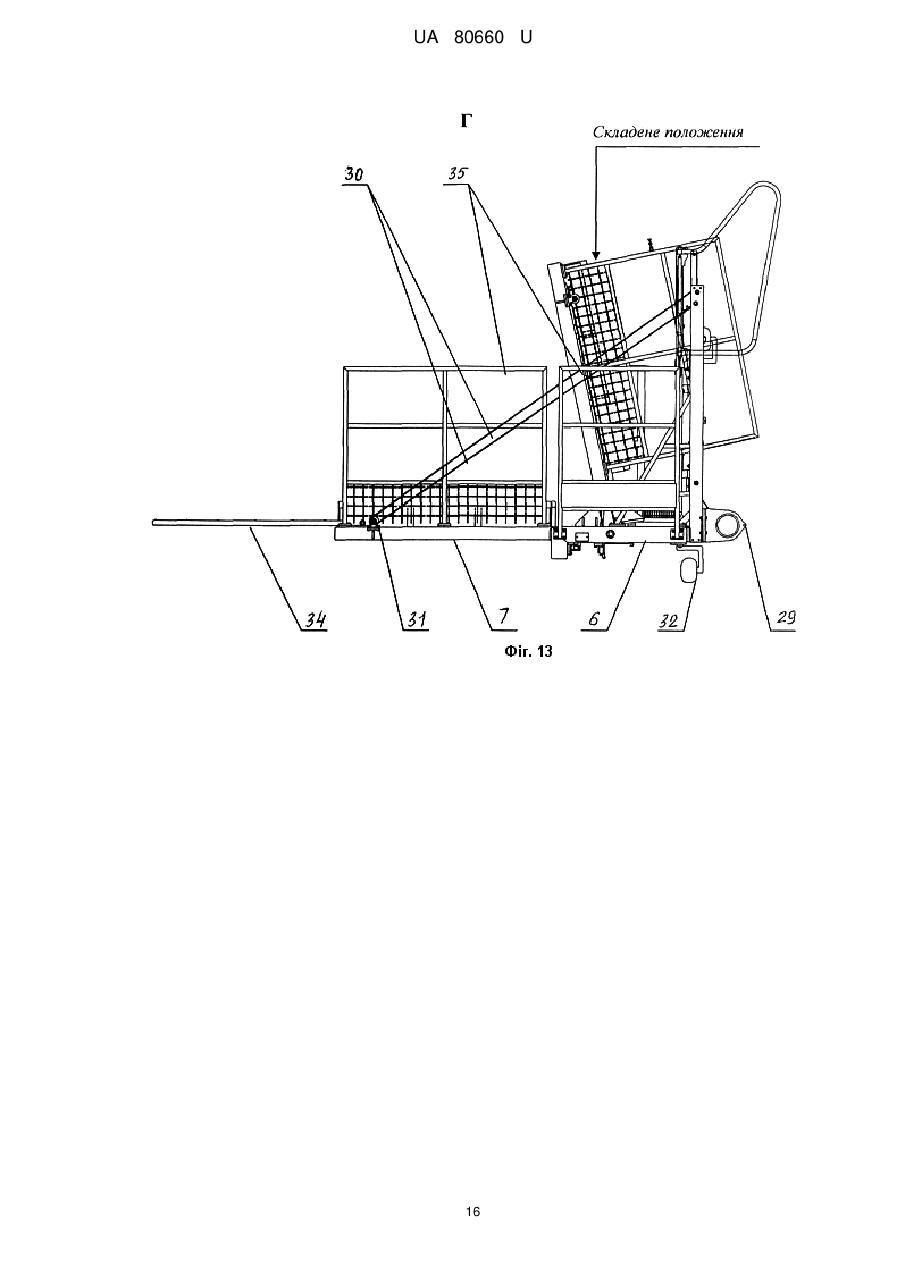
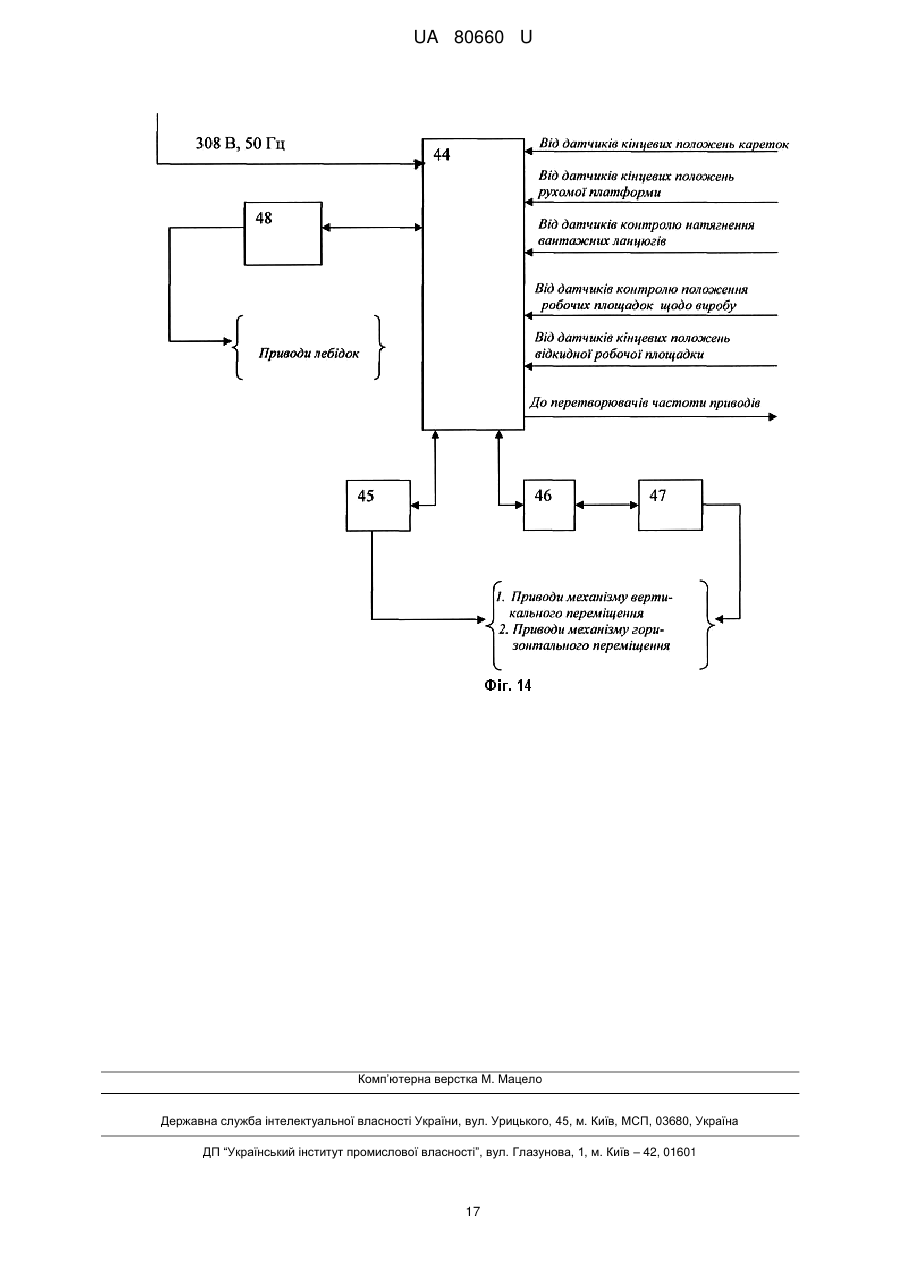
Реферат: Пристрій з підйомними робочими майданчиками, що складається із опор, дзеркально закріплених на основі уздовж її подовжньої осі із заданим кроком одна щодо одної і з можливістю розміщення виробу між протилежними рядами опор, кареток зі змонтованими на них подовжніми робочими майданчиками, закріплених на опорах, механізмів для переміщення кареток у вертикальному напрямі, виконаних з приводами, відкидних поперечних робочих майданчиків і системи керування, виконаної з можливістю керування приводами згаданих механізмів, при чому кожна каретка містить жорстко закріплену на ній нерухому платформу і рухому платформу, з'єднані між собою з можливістю переміщення рухомої платформи в горизонтальному напрямі за допомогою механізмів з приводами, подовжні робочі майданчики змонтовані на рухомих платформах, приводи механізмів для переміщення кареток у вертикальному напрямі змонтовані на верхніх частинах опор, відкидні поперечні робочі майданчики забезпечені механізмами з приводами для їх переміщення, а система керування виконана з можливістю керування приводами механізмів для переміщення рухомих платформ і механізмів для переміщення відкидних поперечних робочих майданчиків і блокування роботи приводів згаданих механізмів при нештатних режимах експлуатації. UA 80660 U (12) UA 80660 U UA 80660 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до пристроїв з підйомними робочими майданчиками для виконання різних технологічних операцій, зокрема, до пристроїв для виконання робіт при виготовленні, ремонті і контрольному прийманні рейкових транспортних засобів, і може бути використаною на підприємствах при виготовленні, модернізації і капітальному ремонті вагонів і локомотивів, а також на підприємствах по виготовленню і ремонту безрейкового транспорту при виконанні аналогічних робіт. Відомий пристрій з підйомними робочими майданчиками (Цыган Б.Г., Цыган А.Б. Вагоностроительные конструкции. Изготовление, модернизация, ремонт/ Монография, под ред. Б.Г. Цыгана.- Кременчуг: Изд. "Кременчуг", 2005.-751 с. – С. 494-495), що складається з опор, дзеркально закріплених на основі уздовж її подовжньої осі із заданим кроком одна щодо одної і з можливістю розміщення виробу між протилежними рядами опор, кареток із змонтованими на них подовжніми робочими майданчиками, закріплених на опорах, механізмів для переміщення кареток у вертикальному напрямі, виконаних з приводами, з'єднаними з каретками за допомогою вантажоносійних ланцюгів, відкидних поперечних робочих майданчиків, шарнірно з'єднаних з кінцевими частинами подовжніх робочих майданчиків, і системи керування, виконаної з можливістю керування приводами згаданих механізмів. Приводи механізмів для переміщення кареток у вертикальному напрямі змонтовані на горизонтальних балках, закріплених між опорами в їх верхніх частинах, і з'єднані за допомогою карданних валів з вантажоносійними ланцюгами, закріпленими на зубчастих колесах у верхніх частинах двох прилеглих опор. Вантажні гілки вантажоносійних ланцюгів з'єднані з каретками і натягачами, а вільні гілки з'єднані з противагами. Подовжні робочі майданчики і відкидні поперечні робочі майданчики виконані з настилами, огорожами, освітлювальними приладами і підводами пневматичних і електричних мереж. Відомий пристрій застосовується для виконання робіт при ремонті кузовів пасажирських вагонів. Недоліками відомого пристрою є: достатньо великий нерегульований зазор між виробом і подовжніми робочими майданчиками, що знижує зручність і безпеку виконання робіт, а також істотно ускладнює виконання робіт на виробах з різною габаритною шириною і довжиною кузова; розміщення приводів механізмів для переміщення кареток у вертикальному напрямі над опорами на горизонтальних балках і їх з'єднання з вантажоносійними ланцюгами за допомогою карданних валів, що знижує зручність і безпеку виконання робіт у верхніх положеннях робочих майданчиків; відсутність механізмів для переміщення відкидних поперечних робочих майданчиків, що знижує зручність і безпеку експлуатації пристрою. В сукупності вказані недоліки знижують зручність і безпеку виконання робіт на робочих майданчиках і обмежують область застосування пристрою. В основу корисної моделі поставлена задача удосконалення конструкції пристрою з підйомними робочими майданчиками за рахунок іншого конструктивного виконання кареток і взаємозв'язку її елементів між собою, іншого розміщення приводів механізмів для переміщення кареток у вертикальному напрямі, оснащення відкидних поперечних робочих майданчиків механізмами для їх переміщення і іншого виконання системи керування. Технічний результат від реалізації поставленої задачі полягає в істотному підвищенні зручності і безпеки виконання робіт при розширенні області застосування пристрою для роботи з виробами різної габаритної ширини і довжини. Поставлена задача вирішується тим, що в пристрої з підйомними робочими майданчиками, що складається з опор, дзеркально закріплених на основі уздовж її подовжньої осі із заданим кроком одна щодо одної і з можливістю розміщення виробу між протилежними рядами опор, кареток із змонтованими на них подовжніми робочими майданчиками, закріплених на опорах, механізмів для переміщення кареток у вертикальному напрямі, виконаних з приводами, відкидних поперечних робочих майданчиків і системи керування, виконаної з можливістю керування приводами згаданих механізмів, згідно корисної моделі кожна каретка містить жорстко закріплену на ній нерухому платформу і рухому платформу, з'єднані між собою з можливістю переміщення рухомої платформи в горизонтальному напрямі за допомогою механізмів з приводами, подовжні робочі майданчики змонтовані на рухомих платформах, приводи механізмів для переміщення кареток у вертикальному напрямі змонтовані на верхніх частинах опор, відкидні поперечні робочі майданчики забезпечені механізмами з приводами для їх переміщення, а система керування виконана з можливістю керування приводами механізмів для переміщення рухомих платформ і механізмів для переміщення відкидних поперечних робочих майданчиків і блокування роботи приводів згаданих механізмів при нештатних режимах експлуатації. 1 UA 80660 U 5 10 15 20 25 30 35 40 45 50 55 60 Доцільно, щоб подовжні робочі майданчики були виконані у вигляді секцій, змонтованих на рухомих платформах кареток, закріплених на трьох прилеглих опорах з кожної сторони від подовжньої осі основи, привід механізму для переміщення рухомих платформ в кожній секції змонтований на нерухомій платформі каретки, закріпленої на центральній опорі, і зв'язаний з рухомою платформою за допомогою рейкової передачі, рухомі платформи на каретках, закріплених на двох прилеглих опорах, зв'язані із згаданим приводом за допомогою валів, другі кінці яких закріплені на відповідних нерухомих платформах і зв'язані з рухомими платформами за допомогою рейкових передач, приводи механізмів для переміщення кареток у вертикальному напрямі з'єднані з каретками за допомогою вантажоносійних ланцюгів, відкидні поперечні робочі майданчики шарнірно з'єднані з подовжніми робочими майданчиками, а приводи для переміщення відкидних поперечних робочих майданчиків секцій виконані у вигляді лебідок. Доцільно, щоб на основі в зоні центральних опор були встановлені трапи для підйому на подовжні робочі майданчики, центральні опори були виконані із сходами, в кожній секції прилеглі подовжні робочі майданчики і відкидні поперечні робочі майданчики вміщували шарнірно з'єднані з ними відкидні трапи, згадані робочі майданчики були виконані з настилами, огорожами, освітлювальними приладами і підводами пневматичних і електричних мереж, а огорожі подовжніх робочих майданчиків в зоні розташування трапів були встановлені хвіртки, що закриваються. Доцільно, щоб опори були обладнані контактними і безконтактними індуктивними датчиками для контролю кінцевих положень кареток і натягнення вантажоносійних ланцюгів, каретки були обладнані контактними індуктивними датчиками положення для контролю кінцевих положень рухомої платформи і оптичними датчиками для контролю положення подовжніх робочих майданчиків щодо виробу, подовжні робочі майданчики були обладнані контактними індуктивними датчиками для контролю кінцевих положень відкидних поперечних робочих майданчиків, початкових положень хвірток в огорожі і відкидних сходів, приводи механізмів для переміщення кареток у вертикальному напрямі і механізмів для переміщення рухомої платформи в горизонтальному напрямі були обладнані перетворювачами частоти з пристроями захисту, а система керування була зв'язана із згаданими датчиками і перетворювачами частоти і виконана з можливістю керування приводами згаданих механізмів в напівавтоматичному режимі і автоматичної їх зупинки в кінцевих положеннях кареток при їх вертикальному переміщенні і рухомих платформ із змонтованими на них подовжніми робочими майданчиками при їх переміщенні в горизонтальному напрямі. Сукупність загальних і відмітних істотних ознак корисної моделі, що заявляється, є достатньою для виконання поставленої задачі і отримання технічного результату від її реалізації. Зокрема, виконання кареток з нерухомою і рухомою платформами, з'єднаних між собою з можливістю переміщення останньої в горизонтальному напрямі, і розміщення подовжніх робочих майданчиків на рухомих платформах дозволяє змінювати відстань між подовжніми робочими майданчиками і виробом з урахуванням забезпечення безпечної для виконання робіт величини зазору при різній габаритній ширині і довжині виробу і за рахунок цього підвищити зручність і безпеку виконання робіт, а також розширити область застосування пристрою. Жорстке закріплення нерухомих платформ на каретках забезпечує переміщення робочих майданчиків у вертикальному напрямі. Виконання приводів механізмів для переміщення кареток у вертикальному напрямі на верхніх частинах опор звільняє простір між опорами від горизонтальних балок і карданних валів, що обертаються, що підвищує зручність і безпеку виконання робіт у верхніх положеннях подовжніх робочих майданчиків. Виконання подовжніх робочих майданчиків з повідними лебідками дозволяє механізувати роботи по переміщенню відкидних поперечних робочих майданчиків і за рахунок цього поліпшити зручність експлуатації пристрою. Виконання системи керування з можливістю керування приводами механізмів для переміщення рухомих платформ у вертикальному і горизонтальному напрямах і лебідок для переміщення відкидних поперечних робочих майданчиків, а також блокування роботи згаданих приводів при нештатних режимах експлуатації дозволяє підвищити рівень автоматизації керування пристроєм при одночасному підвищенні безпеки його експлуатації. Технічне рішення, що заявляється, пояснюється на прикладі конструктивного виконання пристрою з підйомними робочими майданчиками, розробленого Товариством з обмеженою відповідальністю "Науково-виробнича фірма "Техвагонмаш", м. Кременчук, Україна. Пристрій призначений для виконання робіт при виготовленні і контрольному прийманні пасажирських вагонів на вагонобудівному підприємстві. Сутність корисної моделі пояснюється представленими фігурами креслень, де на фіг. 1 показаний загальний вид пристрою, вид спереду; на фіг. 2 – загальний вид пристрою, вид 2 UA 80660 U 5 10 15 20 25 30 35 40 45 50 55 60 зверху; на фіг. 3 – загальний вид пристрою, вид збоку; на фіг. 4 – переріз А-А на фіг. 2; на фіг. 5 – загальний вид проміжної опори, вид спереду; на фіг. 6 – загальний вид проміжної опори, вид збоку; на фіг. 7 – загальний вид центральної опори, вид спереду; на фіг. 8 – загальний вид центральної опори, вид збоку; на фіг. 9 – вид Б на фіг. 7; на фіг. 10 – переріз В-В на фіг. 8; на фіг. 11 – загальний вид секції робочого майданчика, вид спереду; на фіг. 12 – загальний вид секції робочого майданчика, вид зверху; на фіг. 13 – вид Г на фіг. 11; на фіг. 14 - принципова схема системи керування. Пристрій складається (фіг. 1-8) із кутових 1, центральних 2 і проміжних 3 опор, дзеркально закріплених на основі 4 уздовж подовжньої осі рейкового шляху 5 із заданим кроком один щодо одного, подовжніх 6 і відкидних поперечних 7 робочих майданчиків, кареток 8 і 9, механізмів з приводами 10 і 11 для переміщення кареток 8 і 9, відповідно, у вертикальному і горизонтальному напрямах і системи керування. При цьому опори розміщені з обох боків від рейкового шляху на деякій відстані від нього для розміщення між протилежними рядами опор виробу - кузову вагону. Опори 1-3 виконані (фіг. 5-8) із двох стійок 12 і 13, жорстко з'єднаних між собою поперечними елементами (не позначені). У верхній частині стійок 12 і 13 на майданчиках 14 змонтовані приводи 10 механізмів для переміщення кареток 8 і 9 у вертикальному напрямі, а нижні частини згаданих стійок закріплені на основі 4 фундаментними болтами 15. В якості приводів 10 використовуються мотор-редуктори. На зовнішніх бічних сторонах стійок 12 і 13 закріплені напрямні 16 для переміщення кареток 8 і 9. На центральних опорах 2 закріплені сходи 17 і огорожі 18 для підйому на подовжні робочі майданчики 6 в їх піднятому положенні і спуску з них (фіг. 7-8). Біля сходів 17 на основі 4 закріплені трапи 19 для підйому на згадані майданчики 6 в їх нижньому положенні і спуску з них (фіг. 1, 2). Каретки 8 і 9 (фіг. 4, 5-8) консольно закріплені на опорах 1-3 з можливістю переміщення уздовж них у вертикальному напрямі і містять нерухому 20 і рухому 21 платформи, з'єднані між собою з можливістю переміщення останньої по напрямним 22 в горизонтальному напрямі щодо нерухомої платформи 20. Нерухомі платформи 20 жорстко закріплені на каретках 8 і 9, які виконані з роликами (не позначені) для взаємодії з напрямними 16 і зубчатими колесами (не показані) для взаємодії з механізмом для переміщення у вертикальному напрямі (фіг. 6, 8). Подовжні робочі майданчики 6 закріплені на рухомих платформах 21. Приводи 11 механізмів для переміщення рухомих платформ 21 розміщені на нерухомих платформах 20 кареток 9 і зв'язані з рухомими платформами 21 за допомогою рейкових передач 23. Рухомі платформи 21, що розташовані на каретках 8, закріплених на прилеглих опорах 1 і 3, з'єднані з приводами 11 за допомогою валів 24 (фіг. 1), другі кінці яких зв'язані аналогічними рейковими передачами 23 з відповідними рухомими платформами 21. Механізми для переміщення кареток 6 і 7 у вертикальному напрямі виконані (фіг. 4, 9-10) у вигляді мотор-редукторов 10, з'єднаних за допомогою зубчатих коліс (не показані) з двома вантажоносійними ланцюгами 25, нижні частини яких закріплені на зубчатих колесах 26, зв'язаних з натягачами 27. Вантажоносійні ланцюги 25 розташовані між стійками 12 і 13 і з'єднані з каретками 8 і 9 за допомогою закріплених на них зубчатих коліс (не показані). Подовжні робочі майданчики 6 виконані (фіг. 1-4, 11-13) у вигляді секцій, кожна з яких змонтована на рухомих платформах 21 кареток 8 і 9, закріплених на трьох прилеглих опорах 13. Рухомі платформи 21 містять пальці 28 для фіксації подовжніх робочих майданчиків 6 (фіг. 58). Відкидні поперечні майданчики 7 шарнірно з'єднані з кінцевими частинами подовжніх робочих майданчиків 6. Механізми для переміщення відкидних поперечних робочих майданчиків 7 щодо їх шарнірних з'єднань містять повідні лебідки 29, які закріплені в торцевих частинах подовжніх робочих майданчиків 6 і зв'язані за допомогою гнучких тросів 30 з блоками 31, закріпленими на відкидних поперечних майданчиках 7 (фіг. 13). На торцевих частинах подовжніх робочих майданчиків 6 закріплені колеса 32 для опори консольних частин подовжніх робочих майданчиків 6 в їх нижньому положенні на основу 4. Для безперешкодного проходу з однієї секції на іншу прилеглі частини згаданих майданчиків 6 і 7 містять шарнірно з'єднані з ними відкидні трапи 33 і 34, відповідно. Подовжні робочі 6 і відкидні поперечні 7 робочі майданчики виконані з настилами з профілю просічення (не позначені), огорожами 35 з боку опор 1-3, освітлювальними приладами 36 і захисними екранами 37 і 38, що захищають зони, відповідно, вантажоносійних ланцюгів 25 на стійках 1-3 і валів 24 механізмів переміщення рухомих платформ 21. В зоні розташування сходів 17 на огорожах 35 виконані хвіртки 39, що закриваються. Окрім цього, на огорожах 35 закріплені відкидні сходи 40 для переходу з подовжніх робочих майданчиків на дах вагону. На подовжні робочі майданчики 6 за допомогою закріплених на центральних опорах 2 траків 41 виведені підводи мереж для підключення пневматичного і електричного інструменту (не показані). На опорах 1-3 і на подовжніх робочих 3 UA 80660 U 5 10 15 20 25 30 35 40 45 50 55 60 майданчиках 6 встановлені кнопки аварійної зупинки (не показані), а під згаданими майданчиками 6 по їх довжині розміщені тросові датчики 42 аварійної зупинки (фіг. 1). Для виконання робіт з короткобазними рейковими транспортними засобами між протилежними подовжніми робочими майданчиками 6 може встановлюватися знімний поперечний майданчик 43 (фіг. 2). Керування пристроєм здійснюється за допомогою системи керування, яка побудована на базі контролера з цифровими модулями розширення входів і тестовим дисплеєм і виконана з можливістю дистанційного керування приводами механізмів за допомогою керованого по радіо контролера, зв'язаного з двома радіобрелоками. Синхронне керування мотор-редукторами 10 механізмів для переміщення кареток 8 і 9 забезпечується за допомогою перетворювачів частоти, що працюють у векторному режимі. Система керування через стабілізований блок живлення підключена до трифазної електромережі напругою 380 В і частотою 50 Гц. Об'єктами керування є: мотор-редуктори 10 механізмів для переміщення кареток 8 і 9 у вертикальному напрямі; приводи 11 механізмів для переміщення рухомих платформ 21; повідні лебідки 29 механізмів для переміщення відкидних поперечних робочих майданчиків 7. Органами керування є (фіг. 14): - шафа керування 44, закріплена на основі 4 з однією із сторін від рейкового шляху 5 в середній частині пристрою; - пости керування 45, розташовані на подовжніх робочих майданчиках 6; - керований по радіо контролер 46, зв'язаний з двома радіобрелоками 47. Керування повідними лебідками 29 здійснюють за допомогою кнопкових пультів 48, розташованих на подовжніх робочих майданчиках 6 біля відповідних відкидних поперечних майданчиків 7. До складу системи керування також входять перетворювачі частоти мотор-редукторів 10 і приводів 11, контактні і безконтактні індуктивні і оптичні датчики положення, звукові і світлосигнальні пристрої. Система керування забезпечує: - встановлення пріоритету органів керування; - керування в напівавтоматичному режимі приводами згаданих механізмів з автоматичною їх зупинкою в кінцевих положеннях подовжніх робочих 6 і відкидних поперечних 7 майданчиків; - діагностику засобів контролю і керування; - зупинку роботи приводів згаданих механізмів, у тому числі, аварійну, при виконанні будьякій з операцій. Системою керування передбачені технологічні і захисні блокування пристрою, у тому числі: - блокування роботи інших органів керування після встановлення пріоритету для одного з них; - блокування роботи інших органів керування до зняття пріоритету з одного з них; - блокування роботи мотор-редукторів 10 при відпуску кнопки керування переміщенням вгору або вниз і при відміні пріоритету на активному органі керування; - блокування включення мотор-редукторів 10 при одночасній подачі команд на переміщення кареток 8 або 9 вгору і вниз; - блокування роботи мотор-редукторів 10 при досягненні подовжніми робочими майданчиками 6 на будь-якій з опор 1-3 кінцевих верхнього або нижнього положень; - блокування включення мотор-редукторів 10 і приводів 11 механізмів для переміщення рухомих платформ 21 при опущеному положенні відкидних поперечних робочих майданчиків 7; - блокування включення приводів 11 при включених мотор-редукторах 10. Системою керування передбачена аварійна зупинка мотор-редукторів 10 і приводів 11 в наступних нештатних режимах експлуатації: - при натисненні на кнопку аварійної зупинки; - під час вступу сигналу від тросового датчика 42 аварійної зупинки; - при виникненні перевантаження хоча б на одному із згаданих приводів; - за відсутності у встановлений час сигналу про включення перетворювача частоти хоча б на одному із згаданих приводів після подачі команди на їх включення; - за відсутності у встановлений час сигналу від перетворювача частоти про вихід хоча б одного із згаданих приводів на номінальну частоту обертання; - за відсутності необхідного натягнення вантажних ланцюгів 25 механізмів для переміщення кареток 8 і 9 у вертикальному напрямі; 4 UA 80660 U 5 10 15 20 25 30 35 40 45 50 55 60 - при нештатному положенні хвірток 39 в огорожах 35, трапів 33 між подовжніми робочими майданчиками 6 і відкидних сходів 40; - при критичному зближенні подовжніх робочих майданчиків 6 з кузовом вагону. Рух подовжніх робочих майданчиків 6 у вертикальному і горизонтальному напрямах, а також підйом і опускання відкидного поперечного робочого майданчика 7 супроводжує звукова і світлосигнальна сигналізація. Підняте і висунуте положення подовжніх робочих майданчиків 6 і опущене положення відкидного поперечного робочого майданчика 7 при проведенні на них робіт супроводжує світлова сигналізація. Робота пристрою здійснюється таким чином. Початкове положення пристрою: - каретки 8 і 9 із змонтованими на них подовжніми робочими майданчиками 6 знаходяться в нижньому і засунутому положеннях; - відкидні поперечні робочі майданчики 7 підняті; - хвіртки 39 в огорожах 35 закриті; - трапи 33 між подовжніми робочими майданчиками 6 підняті; - сходи 40 для переходу з робочих майданчиків на дах вагону підняті. Після підключення до пристрою силових електричних ланцюгів в заданій послідовності включають кнопкові вимикачі в шафі керування 44 і переводять кнопки аварійного відключення у включене положення. В шафі керування 44 спалахує сигнальне підсвічування кнопок включення і включається текстовий дисплей, який після початкової ініціалізації переходить в робочий режим. Після підйому робітників по трапах 19 і через хвіртки 39 на подовжні робочі майданчики 6 встановлюють пріоритет органів керування. В основному режимі керування виконують з одного з радіобрелоків 47 за допомогою керованого по радіо контролера 46. Активізацію керування з радіобрелока 47 виконують короткочасним натисненням на ньому на кнопку "Пріоритет", при цьому включається підсвічування цієї кнопки, а на дверях шафи керування 44 включається сигнальна лампа "Пріоритет радібрелока". Далі натисненням на радіобрелоку 47 на кнопку "Майданчики вгору" включають мотор-редуктори 10 і переміщають подовжні робочі майданчики 6 на необхідну висоту. В системі керування виконання команди на підйом подовжніх робочих майданчиків 6 проводиться з урахуванням індивідуальної компенсації затримок включення мотор-редукторів 10 для кожного перетворювача частоти. Мотор-редуктори 10 зупиняються при відпуску кнопки "Майданчики вгору" або при досягненні подовжніми робочими майданчиками 6 кінцевого верхнього положення, в якому спрацьовують контактні датчики положення, що закріплені на опорах 1-3. Переміщення подовжніх робочих майданчиків 6 в горизонтальному напрямі виконують натисненням на кнопку "Майданчики вперед", після чого включаються приводи 11 механізмів для переміщення рухомих платформ 21. При цьому встановлення пріоритету органів керування не потрібне. Переміщення припиняється після відпуску цієї кнопки або досягнення рухомими платформами 21 кінцевого висунутого положення при спрацьовуванні відповідних контактних датчиків положення, закріплених на каретках 8 і 9. Після установки подовжніх робочих майданчиків 6 в задане положення щодо кузова вагону опускають трапи 33 і відкидають поперечні робочі майданчики 7. Керування повідними лебідками 29 виконують з кнопкових пультів 48 натисненням на кнопку "Майданчик вниз". Зупинка згаданих майданчиків 7 в опущеному положенні відбудеться після відпуску кнопки або переміщення майданчиків в горизонтальне положення при спрацьовуванні контактних датчиків положення, закріплених на подовжніх робочих майданчиках 6. При необхідності зміни положення подовжніх робочих майданчиків 6 щодо кузова вагону спочатку в зворотній послідовності відкидні поперечні 7 і подовжні робочі 6 майданчики переміщають в початкове положення, потім подовжні робочі майданчики 6 переміщають на задану висоту щодо опор 1-3 і повторюють вищеописані операції по горизонтальному переміщенню подовжніх робочих майданчиків 6 і відкиданню поперечних робочих майданчиків 7. Керування цими операції виконують за допомогою кнопкових пультів 48 і радіобрелоків 47. При цьому синхронність переміщення подовжніх робочих майданчиків у вертикальному напрямі забезпечується за допомогою перетворювачів частоти мотор-редукторів 10, а в горизонтальному напрямі - за допомогою валів 24 механізмів для переміщення рухомих платформ 21. При необхідності зміни в процесі виконання робіт пріоритету органів керування раніше заданий пріоритет знімають натисненням на кнопку вибору пріоритету і відключення підсвічування, що підсвічується, свідчить про його відміну. Далі натисненням на відповідну кнопку в шафі керування 44 або на постах керування 45 призначають новий пріоритет, який підтверджуватиметься підсвічуванням цієї кнопки і включенням відповідної сигнальної лампи на шафі керування 44. 5 UA 80660 U 5 10 15 В процесі виконання робіт за допомогою безконтактних оптичних датчиків положення контролюється відстань між подовжніми робочими майданчиками 6 і кузовом вагону, звукова і світлосигнальна сигналізація супроводжує переміщення подовжніх робочих майданчиків 6, підйом і опускання відкидного поперечного робочого майданчика 7, а світлосигнальна сигналізація інформує про підняте і висунуте положення подовжніх робочих майданчиків 6 і опущене положення відкидного поперечного робочого майданчика 7. При переміщенні подовжніх 6 і відкидних поперечних 7 робочих майданчиків і виконанні на них робіт технологічні і захисні блокування забезпечують безпечну експлуатацію пристрою. Пропонована конструкція пристрою з підйомними робочими майданчиками дозволяє підвищити безпеку і зручність виконання на них робіт і за рахунок цього скоротити їх трудомісткість на 10-15 %. Конструктивне виконання пристрою дозволяє виконувати роботи на кузовах вагонів завдовжки від 16000 до 25000 мм, шириною від 2600 до 3500 мм і висотою від головки рейок 5229 мм, що значно розширює область його застосування. Виконання системи керування з можливістю блокування роботи пристрою при нештатних і аварійних ситуаціях дозволяє істотно підвищити безпеку виконання робіт на робочих майданчиках і експлуатації пристрою. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 30 35 40 45 50 55 60 1. Пристрій з підйомними робочими майданчиками, що складається із опор, дзеркально закріплених на основі уздовж її подовжньої осі із заданим кроком одна щодо одної і з можливістю розміщення виробу між протилежними рядами опор, кареток зі змонтованими на них подовжніми робочими майданчиками, закріплених на опорах, механізмів для переміщення кареток у вертикальному напрямі, виконаних з приводами, відкидних поперечних робочих майданчиків і системи керування, виконаної з можливістю керування приводами згаданих механізмів, який відрізняється тим, що кожна каретка містить жорстко закріплену на ній нерухому платформу і рухому платформу, з'єднані між собою з можливістю переміщення рухомої платформи в горизонтальному напрямі за допомогою механізмів з приводами, подовжні робочі майданчики змонтовані на рухомих платформах, приводи механізмів для переміщення кареток у вертикальному напрямі змонтовані на верхніх частинах опор, відкидні поперечні робочі майданчики забезпечені механізмами з приводами для їх переміщення, а система керування виконана з можливістю керування приводами механізмів для переміщення рухомих платформ і механізмів для переміщення відкидних поперечних робочих майданчиків і блокування роботи приводів згаданих механізмів при нештатних режимах експлуатації. 2. Пристрій за пунктом 1, який відрізняється тим, що подовжні робочі майданчики виконані у вигляді секцій, змонтованих на рухомих платформах кареток, закріплених на трьох прилеглих опорах з кожної сторони від подовжньої осі основи, привід механізму для переміщення рухомих платформ в кожній секції змонтований на нерухомій платформі каретки, закріпленої на центральній опорі, і зв'язаний з рухомою платформою за допомогою рейкової передачі, рухомі платформи на каретках, закріплених на двох прилеглих опорах, зв'язані із згаданим приводом за допомогою валів, другі кінці яких закріплені на відповідних нерухомих платформах і зв'язані з рухомими платформами за допомогою рейкових передач, приводи механізмів для переміщення кареток у вертикальному напрямі з'єднані з каретками за допомогою вантажоносійних ланцюгів, відкидні поперечні робочі майданчики шарнірно з'єднані з подовжніми робочими майданчиками, а приводи для переміщення відкидних поперечних робочих майданчиків секцій виконані у вигляді лебідок. 3. Пристрій за пунктами 1 або 2, який відрізняється тим, що в зоні центральних опор встановлені трапи для підйому на подовжні робочі майданчики, центральні опори виконані із сходами, в кожній секції прилеглі подовжні робочі майданчики і відкидні поперечні робочі майданчики містять шарнірно з'єднані з ними відкидні трапи, згадані робочі майданчики виконані з настилами, огорожами, освітлювальними приладами і підводами пневматичних і електричних мереж, а огорожі подовжніх робочих майданчиків в зоні розташування трапів містять хвіртки, що закриваються. 4. Пристрій за пунктом 1, який відрізняється тим, що опори обладнані контактними і безконтактними індуктивними датчиками для контролю кінцевих положень кареток і натягнення вантажоносійних ланцюгів, каретки обладнані контактними індуктивними датчиками положення для контролю кінцевих положень рухомої платформи і оптичними датчиками для контролю положення подовжніх робочих майданчиків щодо виробу, подовжні робочі майданчики обладнані контактними індуктивними датчиками для контролю кінцевих положень відкидних поперечних робочих майданчиків, початкових положень хвірток в огорожі і відкидних сходів, приводи механізмів для переміщення кареток у вертикальному напрямі і механізмів для 6 UA 80660 U 5 переміщення рухомої платформи в горизонтальному напрямі обладнані перетворювачами частоти з пристроями захисту, а система керування зв'язана із згаданими датчиками і перетворювачами частоти і виконана з можливістю керування приводами згаданих механізмів в напівавтоматичному режимі і автоматичної їх зупинки в кінцевих положеннях кареток при їх вертикальному переміщенні і рухомих платформ із змонтованими на них подовжніми робочими майданчиками при їх переміщенні в горизонтальному напрямі. 7 UA 80660 U 8 UA 80660 U 9 UA 80660 U 10 UA 80660 U 11 UA 80660 U 12 UA 80660 U 13 UA 80660 U 14 UA 80660 U 15 UA 80660 U 16 UA 80660 U Комп’ютерна верстка М. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 17
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice with lifting working platforms
Автори англійськоюKalynychenko Vladyslav Vasyliovych, Maliuseiko Viktor Myronovych, Motorin Artur Mykolaiovych, Rankovskyi Serhii Vitaliiovych
Назва патенту російськоюУстройство с подъемными рабочими площадками
Автори російськоюКалиниченко Владислав Васильевич, Малюсейко Виктор Миронович, Моторин Артур Николаевич, Раньковский Сергей Витальевич
МПК / Мітки
МПК: B66F 11/04
Мітки: майданчиками, пристрій, підйомними, робочими
Код посилання
<a href="https://ua.patents.su/19-80660-pristrijj-z-pidjjomnimi-robochimi-majjdanchikami.html" target="_blank" rel="follow" title="База патентів України">Пристрій з підйомними робочими майданчиками</a>
Кантувач з підйомними центрами
Номер патенту: 56507
Опубліковано: 10.01.2011
Автори: Малюсейко Віктор Миронович, В'юнник Микола Васильович, Моторін Артур Миколайович
МПК: B23K 37/04
Мітки: підйомними, центрами, кантувач
Формула / Реферат:
1. Кантувач з підйомними центрами, що складається з двох дзеркально розташованих на заданій відстані одна щодо одної опор, кожна з яких закріплена на основі і складається з двох стійок, з'єднаних у верхній частині горизонтальною балкою, каретки, виконаної з можливістю переміщення уздовж стійок, механізму підйому, привід якого закріплений на горизонтальній балці і кінематично з'єднаний з кареткою, і змонтованого на каретці вантажоносійного...
Пристрій для підвищення ефективності цементування свердловин з комбінованими робочими елементами
Номер патенту: 102023
Опубліковано: 27.05.2013
Автори: Марцинків Олег Богданович, Сенюшкович Микола Володимирович, Білецький Ярослав Семенович, Білецький Мирослав Семенович, Білецька Ірина Ярославівна
МПК: E21B 33/14, F15D 1/12, E21B 17/10, E21B 37/02, E21B 11/00
Мітки: ефективності, цементування, пристрій, підвищення, свердловин, елементами, комбінованими, робочими
Формула / Реферат:
Пристрій для підвищення ефективності цементування свердловин з комбінованими робочими елементами, що складається з корпуса, скомпонованого з приєднувальною муфтою і ніпелем, і робочих елементів, який відрізняється тим, що корпус оснащений по зовнішній поверхні гвинтоподібними шліцами і додатково оснащений рухомою обоймою, яка знаходиться в шліцьовому зачепленні з корпусом і споряджена комбінованими робочими елементами у вигляді дугоподібних...
Кантувач з підйомними центрами
Номер патенту: 56506
Опубліковано: 10.01.2011
Автори: В'юнник Микола Васильович, Малюсейко Віктор Миронович, Моторін Артур Миколайович
МПК: B23K 37/04
Мітки: центрами, підйомними, кантувач
Формула / Реферат:
1. Кантувач з підйомними центрами, що складається здвох дзеркально розташованих на заданій відстані одна щодо одної опор, кожна з яких закріплена на основі і складається з двох стійок, з'єднаних у верхній частині горизонтальною балкою, каретки, виконаної з можливістю переміщення уздовж стійок, механізму підйому, привід якого закріплений на горизонтальній балці і кінематично з'єднаний з кареткою, і змонтованого на каретці вантажоносійного...
Пристрій для регулювання периферійних радіальних зазорів поміж статором та робочими лопатками газотурбінного двигуна
Номер патенту: 57791
Опубліковано: 15.07.2003
Автори: Ісаков Борис Володимирович, Фінько Ігор Іанович, Даниленко Федір Степанович, Дашевський Юрій Якович
Мітки: статором, зазорів, поміж, регулювання, робочими, периферійних, радіальних, пристрій, двигуна, лопатками, газотурбінного
Формула / Реферат:
1. Пристрій для регулювання периферійних радіальних зазорів поміж статором і робочими лопатками турбіни газотурбінного двигуна, що містить корпус із встановленим у ньому регулюючим елементом, закріплені на останньому сегментні вставки, центруючий циліндр, пружні елементи, який відрізняється тим, що регулюючий елемент виконаний у вигляді кільця, теплова інерційність якого при відсутності обдування повітрям відповідає тепловій інерційності...
Ґрунтообробний агрегат зі змінними робочими органами
Номер патенту: 14300
Опубліковано: 15.05.2006
Автор: Атрощенко Володимир Іванович
МПК: A01B 49/02
Мітки: органами, робочими, ґрунтообробний, змінними, агрегат
Формула / Реферат:
Ґрунтообробний агрегат зі змінними робочими органами, що містить раму з приєднувальним пристроєм, встановлену на колеса, яка має відкриту зварну конструкцію, виконану з повздовжніх та поперечних брусів, що дозволить нерухомо без регулювання розмістити робочі елементи, виконані у вигляді дискових гряділів на однаковій відстані один від одного з відповідно фіксованим кроком, чергуючи у рядах ліві і праві, які вміщують сферичний диск з...
Попередній патент: Лабораторний пристрій для визначення швидкості фільтрування
Наступний патент: Спосіб отримання дизельного біопалива з технічних тваринних жирів
Випадковий патент: Профілактичний біопрепарат субалін