Протез міжхребцевого диска

Формула / Реферат
1. Пристрій для заміни принаймні частини міжхребцевого диска в хребетному стовпі між кінцевими пластинками тіла першого хребця і тіла другого хребця хребетного стовпа, який включає в себе:
перший конструктивний елемент, який має поверхню зіткнення з першим хребцем для зчеплення з кінцевою пластинкою тіла першого хребця, і який має першу поверхню зчленування; і
другий конструктивний елемент, який має поверхню зіткнення з другим хребцем для зчеплення з кінцевою пластинкою тіла другого хребця, і який має другу поверхню зчленування,
який відрізняється тим, що міжхребцева відстань визначається як осьова компонента лінії, яка простягається між центроїдом згаданої поверхні зіткнення з першим хребцем і центроїдом згаданої поверхні зіткнення з другим хребцем,
і тим, що згадана перша поверхня зчленування і згадана друга поверхня зчленування утворюють принаймні частину механізму зчленування, виконаного так, що, коли діє осьова стискна сила, то:
(і) згадані поверхні зіткнення з першим і другим хребцями сприймають стискну силу для забезпечення заздалегідь встановленої мінімальної міжхребцевої відстані;
(іі) згаданий другий конструктивний елемент є рухомим відносно першого згаданого конструктивного елемента при русі, який відповідає аксіальній ротації, передній флексії і задній екстензії, і латеральній флексії, причому кожний із цих рухів має відповідний діапазон руху; і
(iiі) згадана міжхребцева відстань зростає як гладка функція кутового відхилення від нейтрального положення принаймні в частині згаданого діапазону руху в кожному з напрямів для кожного із згаданих рухів: аксіальної ротації, передньої флексії і задньої екстензії, і латеральної флексії, таким чином забезпечуючи безударне згасання руху.
2. Пристрій за п. 1, який відрізняється тим, що згаданий механізм зчленування виконаний так, що перша похідна міжхребцевої відстані в залежності від кутового відхилення від нейтрального положення зростає по суті монотонно відносно згаданого кутового відхилення від згаданого нейтрального положення в більшій частині згаданого діапазону руху для руху в кожному з напрямів для кожного з рухів: аксіальної ротації, передньої флексії і задньої екстензії, і латеральної флексії.
3. Пристрій за п. 1, який відрізняється тим, що згаданий механізм зчленування виконаний так, що згаданий другий конструктивний елемент є рухомим відносно згаданого першого конструктивного елемента при русі, який відповідає поєднанню аксіальної ротації, передньої флексії або задньої екстензії і латеральної флексії.
4. Пристрій за п. 1, який відрізняється тим, що згаданий механізм зчленування виконаний так, що пристрій самоцентрується при осьовому навантаженні для того, щоб сприяти поверненню по суті в заздалегідь визначене нейтральне положення.
5. Пристрій за п. 1, який відрізняється тим, що згадані перший конструктивний елемент і другий конструктивний елемент є твердими тілами.
6. Пристрій за п. 1, який відрізняється тим, що згадані перший конструктивний елемент і другий конструктивний елемент виготовлені головним чином із металевого матеріалу.
7. Пристрій за п. 1, який відрізняється тим, що згаданий перший конструктивний елемент і другий конструктивний елемент виготовлені головним чином із керамічного матеріалу.
8. Пристрій за п. 1, який відрізняється тим, що згадана перша поверхня зчленування і згадана друга поверхня зчленування розміщені в безпосередньому контакті для утворення згаданого зчленування.
9. Пристрій за п. 1, який відрізняється тим, що на згаданій першій поверхні зчленування виконаний виступ, а на згаданій другій поверхні зчленування виконана взаємодіюча з ним заглибина, причому згаданий виступ має таку форму, що в сагітальному перерізі зовнішня форма згаданого виступу характеризується:
(a) опукло викривленою ділянкою вінця, яка має змінну кривизну з локальним мінімумом кривизни у вершині згаданої ділянки вінця; і
(b) увігнуто викривленою перехідною ділянкою в основі згаданого виступу.
10. Пристрій за п. 9, який відрізняється тим, що згаданий виступ, крім того, виконаний так, що в вінцевому перерізі зовнішня форма згаданого виступу характеризується:
(a) опукло викривленою ділянкою вінця, яка має змінну кривизну з локальним мінімумом кривизни у вершині згаданої ділянки вінця; і
(b) увігнуто викривленою перехідною ділянкою в основі згаданого виступу.
11. Пристрій за п. 10, який відрізняється тим, що згаданий виступ, крім того, виконаний так, що ширина згаданого виступу в згаданому вінцевому перерізі більше, ніж ширина згаданого виступу в згаданому сагітальному перерізі.
12. Пристрій за п. 10, який відрізняється тим, що згаданий виступ, крім того, виконаний так, що в аксіальному перерізі згаданий виступ має по суті еліптичну зовнішню форму.
13. Пристрій за п. 12, який відрізняється тим, що згадана взаємодіюча з виступом заглибина утворена по суті еліптичною увігнутістю з опукло викривленою перехідною ділянкою, яка сполучається з навколишньою ділянкою згаданої другої поверхні зчленування.
14. Пристрій за п. 10, який відрізняється тим, що згаданий виступ має множину бічних ділянок із заглибинами, і тим, що згадана взаємодіюча з виступом заглибина має відповідну множину ділянок із ребрами.
15. Пристрій за п. 1, який відрізняється тим, що на згаданій першій поверхні зчленування виконаний виступ, який має множину ребер, а на згаданій другій поверхні зчленування виконана взаємодіюча з ним заглибина, яка має множину пазів для приймання згаданих ребер, і тим, що згадані ребра взаємодіють із суміжними поверхнями згаданих пазів для створення згаданого збільшення міжхребцевої відстані.
16. Пристрій за п. 1, який відрізняється тим, що на згаданій першій поверхні зчленування виконана множина виступів, а на згаданій другій поверхні зчленування виконані взаємодіючі з ними елементи у формі заглибин.
17. Пристрій за п. 1, який відрізняється тим, що на згаданій першій поверхні зчленування виконана множина заглибин, і на згаданій другій поверхні зчленування виконана відповідна кількість заглибин, при цьому згаданий механізм зчленування додатково включає в себе відповідну множину опорних елементів, причому кожний зі згаданих опорних елементів захоплюється розташованими одна навпроти одної парами згаданих заглибин згаданих першої і другої поверхонь зчленування.
18. Пристрій за п. 17, який відрізняється тим, що опорні елементи виконані у вигляді кульових опор.
19. Пристрій за п. 18, який відрізняється тим, що згадана множина заглибин на згаданих першій і другій поверхнях зчленування виконані у вигляді частково сферичних заглибин із радіусом кривизни, більшим ніж у згаданих кульових опор, причому місцеположення згаданих заглибин згаданої першої поверхні зчленування зміщені відносно місцеположень згаданих заглибин згаданої другої поверхні зчленування.
20. Пристрій за п. 19, який відрізняється тим, що згаданий механізм зчленування реалізований чотирма згаданими кульовими опорами і чотирма згаданими заглибинами в кожній зі згаданих першої і другої поверхонь зчленування.
Текст
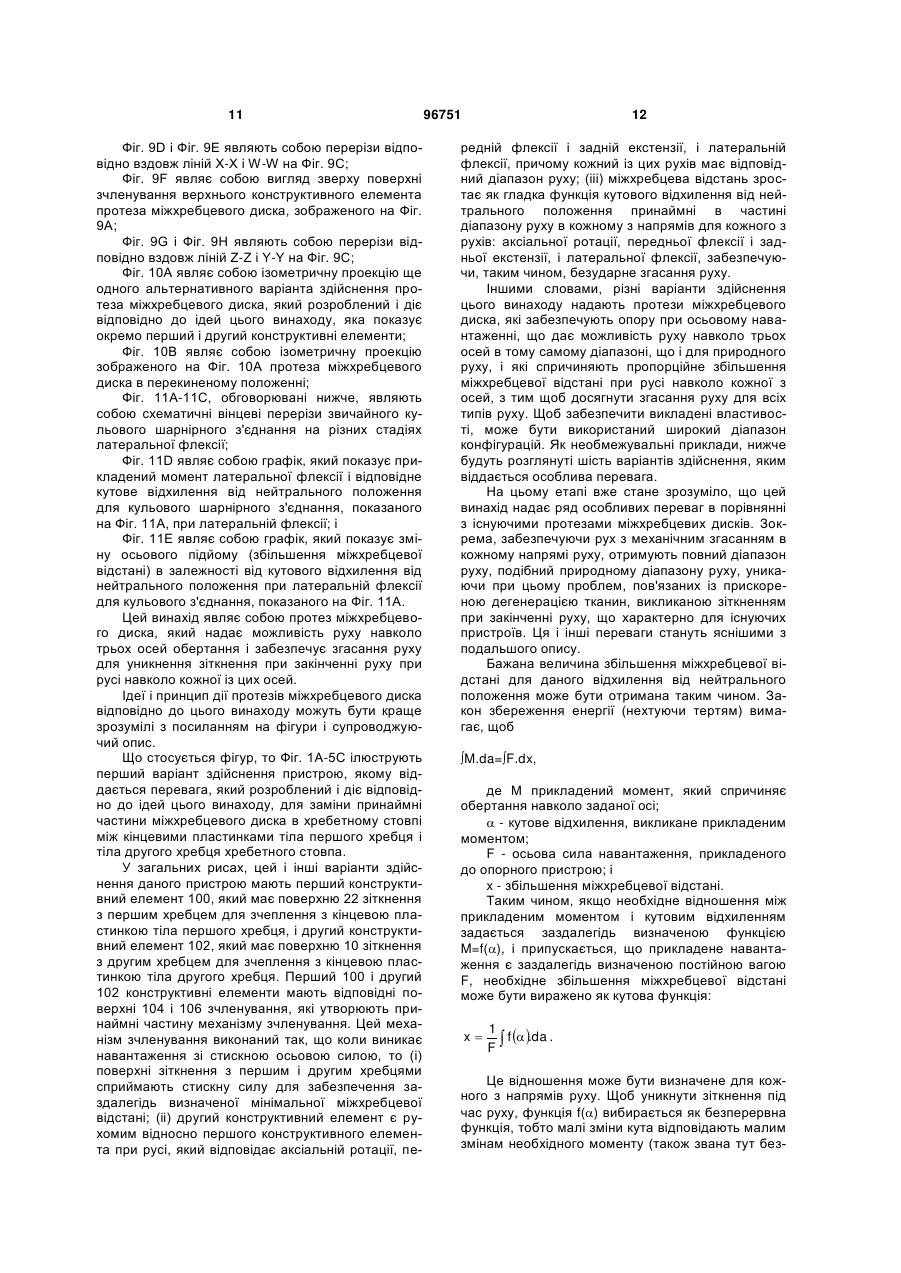
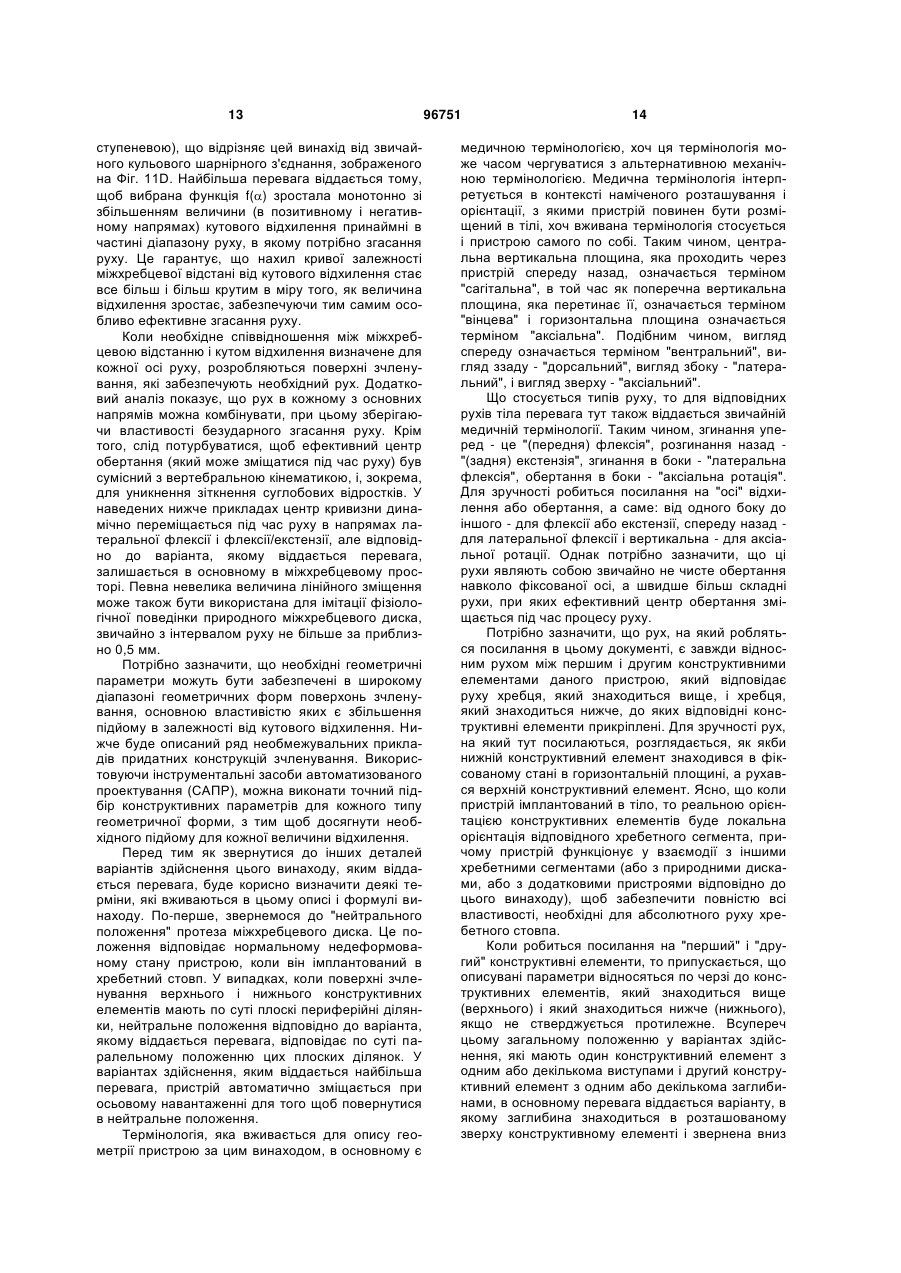
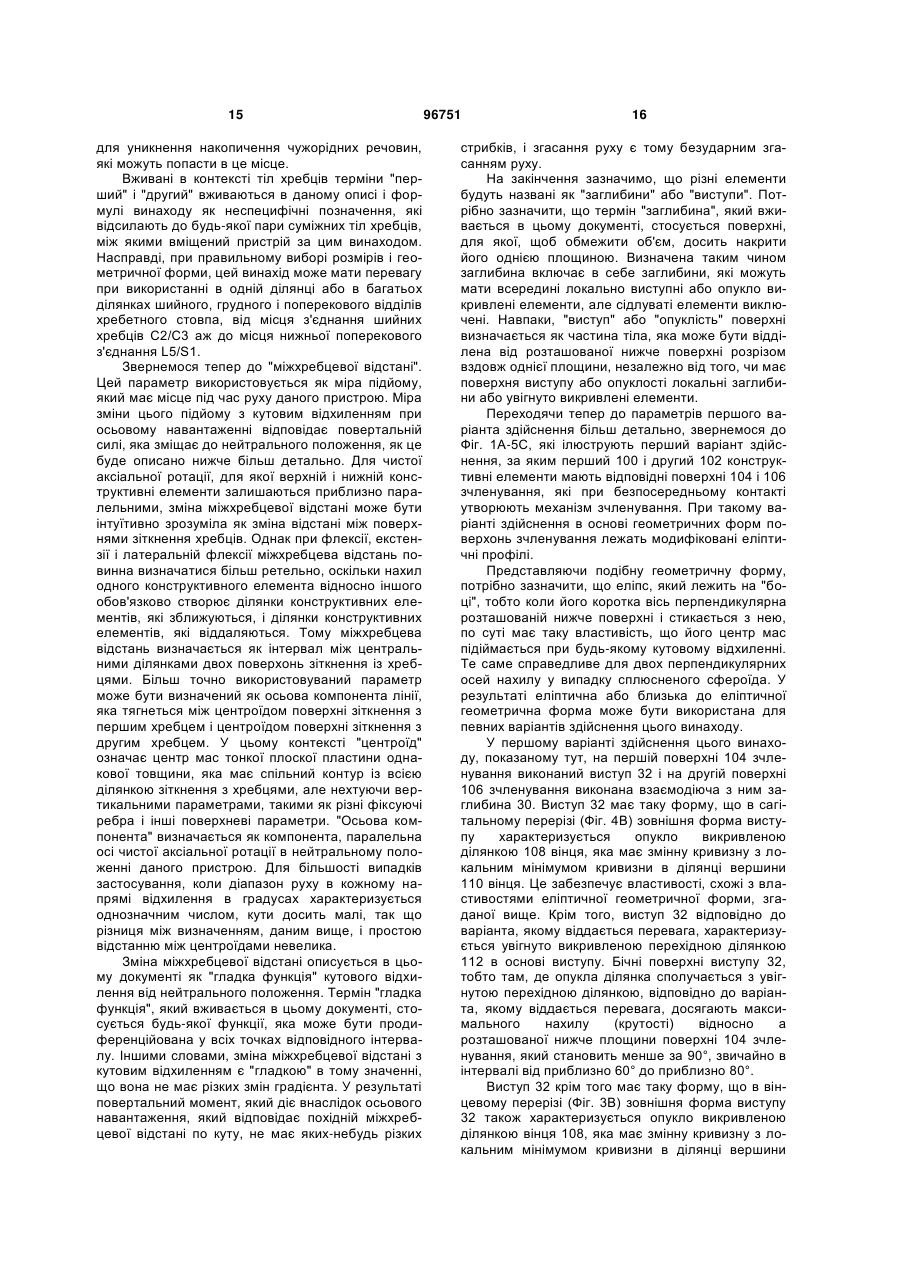
1. Пристрій для заміни принаймні частини міжхребцевого диска в хребетному стовпі між кінцевими пластинками тіла першого хребця і тіла другого хребця хребетного стовпа, який включає в себе: перший конструктивний елемент, який має поверхню зіткнення з першим хребцем для зчеплення з кінцевою пластинкою тіла першого хребця, і який має першу поверхню зчленування; і другий конструктивний елемент, який має поверхню зіткнення з другим хребцем для зчеплення з кінцевою пластинкою тіла другого хребця, і який має другу поверхню зчленування, який відрізняється тим, що міжхребцева відстань визначається як осьова компонента лінії, яка простягається між центроїдом згаданої поверхні зіткнення з першим хребцем і центроїдом згаданої поверхні зіткнення з другим хребцем, і тим, що згадана перша поверхня зчленування і згадана друга поверхня зчленування утворюють принаймні частину механізму зчленування, виконаного так, що, коли діє осьова стискна сила, то: (і) згадані поверхні зіткнення з першим і другим хребцями сприймають стискну силу для забезпечення заздалегідь встановленої мінімальної міжхребцевої відстані; (іі) згаданий другий конструктивний елемент є рухомим відносно першого згаданого конструктивного елемента при русі, який відповідає аксіальній ротації, передній флексії і задній екстензії, і латеральній флексії, причому кожний із цих рухів має відповідний діапазон руху; і 2 (19) 1 3 96751 4 виконана взаємодіюча з ним заглибина, причому згаданий виступ має таку форму, що в сагітальному перерізі зовнішня форма згаданого виступу характеризується: (a) опукло викривленою ділянкою вінця, яка має змінну кривизну з локальним мінімумом кривизни у вершині згаданої ділянки вінця; і (b) увігнуто викривленою перехідною ділянкою в основі згаданого виступу. 10. Пристрій за п. 9, який відрізняється тим, що згаданий виступ, крім того, виконаний так, що в вінцевому перерізі зовнішня форма згаданого виступу характеризується: (a) опукло викривленою ділянкою вінця, яка має змінну кривизну з локальним мінімумом кривизни у вершині згаданої ділянки вінця; і (b) увігнуто викривленою перехідною ділянкою в основі згаданого виступу. 11. Пристрій за п. 10, який відрізняється тим, що згаданий виступ, крім того, виконаний так, що ширина згаданого виступу в згаданому вінцевому перерізі більше, ніж ширина згаданого виступу в згаданому сагітальному перерізі. 12. Пристрій за п. 10, який відрізняється тим, що згаданий виступ, крім того, виконаний так, що в аксіальному перерізі згаданий виступ має по суті еліптичну зовнішню форму. 13. Пристрій за п. 12, який відрізняється тим, що згадана взаємодіюча з виступом заглибина утворена по суті еліптичною увігнутістю з опукло викривленою перехідною ділянкою, яка сполучається з навколишньою ділянкою згаданої другої поверхні зчленування. 14. Пристрій за п. 10, який відрізняється тим, що згаданий виступ має множину бічних ділянок із заглибинами, і тим, що згадана взаємодіюча з виступом заглибина має відповідну множину ділянок із ребрами. 15. Пристрій за п. 1, який відрізняється тим, що на згаданій першій поверхні зчленування викона ний виступ, який має множину ребер, а на згаданій другій поверхні зчленування виконана взаємодіюча з ним заглибина, яка має множину пазів для приймання згаданих ребер, і тим, що згадані ребра взаємодіють із суміжними поверхнями згаданих пазів для створення згаданого збільшення міжхребцевої відстані. 16. Пристрій за п. 1, який відрізняється тим, що на згаданій першій поверхні зчленування виконана множина виступів, а на згаданій другій поверхні зчленування виконані взаємодіючі з ними елементи у формі заглибин. 17. Пристрій за п. 1, який відрізняється тим, що на згаданій першій поверхні зчленування виконана множина заглибин, і на згаданій другій поверхні зчленування виконана відповідна кількість заглибин, при цьому згаданий механізм зчленування додатково включає в себе відповідну множину опорних елементів, причому кожний зі згаданих опорних елементів захоплюється розташованими одна навпроти одної парами згаданих заглибин згаданих першої і другої поверхонь зчленування. 18. Пристрій за п. 17, який відрізняється тим, що опорні елементи виконані у вигляді кульових опор. 19. Пристрій за п. 18, який відрізняється тим, що згадана множина заглибин на згаданих першій і другій поверхнях зчленування виконані у вигляді частково сферичних заглибин із радіусом кривизни, більшим ніж у згаданих кульових опор, причому місцеположення згаданих заглибин згаданої першої поверхні зчленування зміщені відносно місцеположень згаданих заглибин згаданої другої поверхні зчленування. 20. Пристрій за п. 19, який відрізняється тим, що згаданий механізм зчленування реалізований чотирма згаданими кульовими опорами і чотирма згаданими заглибинами в кожній зі згаданих першої і другої поверхонь зчленування. Цей винахід стосується протезів міжхребцевих дисків і, зокрема, він стосується протезів міжхребцевих дисків, які надають можливість руху навколо трьох осей обертання і забезпечують згасання руху для уникнення зіткнення при закінченні руху при русі навколо кожної з цих осей. Багато які звичайно застосовувані протези міжхребцевих дисків (відомі фахівцям як "Total Disc Replacement" - TDR) побудовані на кульових шарнірних з'єднаннях. Хоч кульове з'єднання забезпечує повний діапазон руху у всіх напрямах, воно не забезпечує згасання руху. Зокрема, що стосується аксіальної ротації, то кульове з'єднання саме по собі по суті уможливлює практично необмежену ротацію з мінімальним опором. Внаслідок цього обмеження руху хребців залежить від навколишніх м'яких тканин або зіткнення суглобових відростків, що відповідно прискорює дегенерацію суглобових відростків і суміжних тканин. При передній флексії, задній екстензії і латеральної флексії рух звичайно обмежується зіткненням кромок деталей протеза міжхребцевого диска одна з одною; ці повторювані зіткнення, які мають місце при використанні в звичайних умовах, можуть призвести до зруйнування самого протеза міжхребцевого диска або навколишніх тканин. Зокрема, як база для порівняння із цим винаходом, який буде описаний нижче, на Фіг. 11А-11С показані перерізи протеза міжхребцевого диска на основі кульової геометрії в різних положеннях латеральної флексії, в той час як Фіг. 11D і Фіг. 11Е показують згинальний момент і підйом (який відповідає "міжхребцевій відстані", яка буде визначена нижче) в залежності від кутового відхилення від центрального ("нейтрального") положення. Стандартним діапазоном руху такого зчленування є інтервал від нейтрального положення, показаного на Фіг. 11A, до положення зіткнення кромок одна з одною, показаного на Фіг. 11В, яке відповідає в цьому випадку відхиленню приблизно 6°. Всере 5 дині цього діапазону, як показано на Фіг. 11D, потрібен мінімальний згинальний момент, щоб викликати рух, який тільки повинен подолати будь-який фрикційний опір зчленування. Як тільки зіткнення кромок станеться, виникає різкий опір подальшому відхиленню, так що поступово збільшуваний прикладений момент не спричиняє ніякого руху. Тільки якщо крутний момент перевищує певний поріг, відхилення буде продовжуватися за рахунок виходу кулі з заглибини, як це показано на Фіг. 11С, тобто до положення, яке не можна вважати нормальним. Одного разу почавшись, рух підйому буде продовжуватися при постійному прикладеному обертальному моменті. Відповідний графік міжхребцевої відстані в залежності від кутового відхилення показаний на Фіг. 11E. При нормальному робочому інтервалі кульової опори 0-6 підйом не відбувається. Якщо потім прикладається достатній обертальний момент, то куля починає виходити із заглибини, міжхребцева відстань починає різко збільшуватися, на початковій стадії приблизно в лінійній залежності від кута відхилення. Робилися різні спроби розробки механізму зчленування для протеза міжхребцевого диска, який найбільш точно моделює різні аспекти динаміки природного міжхребцевого диска. До таких механізмів належать численні пристрої, які використовують циліндричні або сідлуваті поверхні зчленування. Приклади таких пристроїв можна знайти в таких патентах США: №№ 6,706,068; 6,908,484; 6,972,037; 6,972,038; 6,986,789; 6,989,032; 6,994,727; 6,994,729; 6,997,955; 7,048,764 і 7048766, а також в таких публікаціях заявок на патент США: № 2004/0225,364 і № 2004/0073311. Особливий інтерес як передумова створення цього винаходу становить наведена в деяких документах, на які вище зроблене посилання, ідея дистракції (тобто збільшуваної міжхребцевої відстані) в залежності від кутового відхилення при аксіальній ротації для генерування повертальних (самоцентрувальних) сил. Конкретніше, оскільки хребетний стовп в нормальному стані навантажений по осі верхньою частиною тіла, то механізм зчленування, який викликає дистракцію зчленування в залежності від аксіальної ротації, виконує роботу проти навантаження, що дає в результаті повертальну силу, яка прагне повернути зчленування в нейтральне положення аксіальної ротації. Приклад таких ідей можна знайти у вищезазначеному патенті США № 6,994,727. Ідея дистракції зчленування при прикладеному навантаженні для забезпечення повертальної сили, яка обговорюється у вищенаведеному документі, застосовна тільки для одного виду руху, а саме аксіальної ротації. Крім того, документи, відомі в цей час винахіднику, не надають якого-небудь прийнятного рішення, яке забезпечує згасання руху з метою обмеження діапазону руху для кожного типу руху для уникнення зіткнення або іншого небезпечного впливу на навколишні тканини. Тому є необхідність в протезі міжхребцевого диска, який надавав би можливість руху навколо трьох осей обертання і забезпечував би згасання 96751 6 руху для уникнення зіткнення при закінченні руху при русі навколо кожної із цих осей. Цей винахід являє собою протез міжхребцевого диска, який надає можливість руху навколо трьох осей обертання і забезпечує згасання руху для уникнення зіткнення при закінченні руху при русі навколо кожної із цих осей. Відповідно до ідей цього винаходу, представлений пристрій для заміни принаймні частини міжхребцевого диска в хребетному стовпі між кінцевими пластинками тіла першого хребця і тіла другого хребця хребетного стовпа, причому цей пристрій включає в себе: (а) перший конструктивний елемент, який має поверхню зіткнення з першим хребцем для з'єднання з кінцевою пластинкою тіла першого хребця, і який має першу поверхню зчленування; і (b) другий конструктивний елемент, який має поверхню зіткнення з другим хребцем для з'єднання з кінцевою пластинкою тіла другого хребця, і який має другу поверхню зчленування; причому міжхребцева відстань визначається як осьова компонента лінії, яка тягнеться між центроїдом поверхні зіткнення з першим хребцем і центроїдом поверхні зіткнення з другим хребцем, причому перша поверхня зчленування і друга поверхня зчленування утворюють принаймні частину механізму зчленування, виконаного так, що коли на нього діє навантаження стискної осьової сили, то: (і) поверхні зіткнення з першим і другим хребцями сприймають стискну силу для забезпечення заздалегідь встановленої мінімальної міжхребцевої відстані; (іі) другий конструктивний елемент є рухомим відносно першого конструктивного елемента при русі, який відповідає аксіальній ротації, передній флексії, задній екстензії і латеральній флексії, причому кожний із цих рухів має свій діапазон руху; і (ііі) міжхребцева відстань зростає як гладка функція кутового відхилення від нейтрального положення принаймні в частині діапазону руху в кожному напрямі для кожного з рухів: аксіальної ротації, передньої флексії, задньої екстензії і латеральної флексії, таким чином забезпечуючи безударне згасання руху. Відповідно до іншої особливості цього винаходу, механізм зчленування виконаний так, що перша похідна міжхребцевої відстані в залежності від кутового відхилення від нейтрального положення зростає по суті монотонно відносно кутового відхилення від нейтрального положення в більшій частині діапазону руху в кожному з напрямів для кожного з рухів: аксіальної ротації, передньої флексії, задньої екстензії і латеральної флексії. Відповідно до ще однієї особливості цього винаходу, механізм зчленування виконаний так, що другий конструктивний елемент є рухомим відносно першого конструктивного елемента при русі, який відповідає поєднанню аксіальної ротації, передньої флексії або задньої екстензії і латеральної флексії. Відповідно до ще однієї особливості цього винаходу, механізм зчленування виконаний так, що пристрій самоцентрується при осьовому навантаженні для того щоб сприяти поверненню по суті в заздалегідь визначене нейтральне положення. 7 Відповідно до ще однієї особливості цього винаходу, перший і другий конструктивні елементи являють собою тверді тіла. Відповідно до ще однієї особливості цього винаходу, перший і другий конструктивні елементи виготовлені головним чином із металевого матеріалу. Відповідно до ще однієї особливості цього винаходу, перший і другий конструктивні елементи виготовлені головним чином із керамічного матеріалу. Відповідно до ще однієї особливості цього винаходу, перша поверхня зчленування і друга поверхня зчленування розміщені в безпосередньому контакті для утворення механізму зчленування. Відповідно до ще однієї особливості цього винаходу, на першій поверхні зчленування виконаний виступ і на другій поверхні зчленування виконана взаємодіюча з ним заглибина, причому виступ має таку форму, що в сагітальному перерізі зовнішня форма виступу характеризується (а) опукло викривленою ділянкою вінця, яка має змінну кривизну з локальним мінімумом кривизни у вершині ділянки вінця; і (b) увігнуто викривленою перехідною ділянкою в основі виступу. Відповідно до ще однієї особливості цього винаходу, виступ, крім того, виконаний так, що в вінцевому перерізі зовнішня форма виступу характеризується (а) опукло викривленою ділянкою вінця, яка має змінну кривизну з локальним мінімумом кривизни у вершині ділянки вінця і (b) увігнуто викривленою перехідною ділянкою в основі виступу. Відповідно до ще однієї особливості цього винаходу, виступ, крім того, виконаний так, що ширина виступу в вінцевому перерізі більше, ніж ширина виступу в сагітальному перерізі. Відповідно до ще однієї особливості цього винаходу, виступ, крім того, виконаний так, що в аксіальному перерізі виступ має по суті еліптичну зовнішню форму. Відповідно до ще однієї особливості цього винаходу, взаємодіюча з виступом заглибина утворена по суті еліптичною увігнутістю з опукло викривленою перехідною ділянкою, яка сполучається з навколишньою ділянкою другої поверхні зчленування. Відповідно до ще однієї особливості цього винаходу, виступ має множину бічних ділянок із заглибинами, при цьому взаємодіюча з ним заглибина має відповідну множину ділянок із ребрами. Відповідно до ще однієї особливості цього винаходу, на першій поверхні зчленування виконаний виступ, який має множину ребер, а на другій поверхні зчленування виконана взаємодіюча з ним заглибина, яка має множину пазів для приймання цих ребер, при цьому ці ребра взаємодіють із суміжними поверхнями пазів для створення збільшення міжхребцевої відстані. Відповідно до ще однієї особливості цього винаходу, на першій поверхні зчленування виконана множина виступів, а на другій поверхні зчленування виконані взаємодіючі з ними елементи у формі заглибин. Відповідно до ще однієї особливості цього винаходу, на першій поверхні зчленування виконана 96751 8 множина заглибин, і на другій поверхні зчленування виконана відповідна множина заглибин, при цьому механізм зчленування додатково включає в себе відповідну множину опорних елементів, кожний з яких захоплюється розташованими один навпроти одного парами заглибин першої і другої поверхонь зчленування. Відповідно до ще однієї особливості цього винаходу, опорні елементи виконані у вигляді кульових опор. Відповідно до ще однієї особливості цього винаходу, множина заглибин першої і другої поверхонь зчленування виконані у вигляді частково сферичних заглибин із радіусом кривизни більшим, ніж у кульових опор, причому місцеположення заглибин першої поверхні зчленування зміщені відносно місцеположень заглибин другої поверхні зчленування. Відповідно до ще однієї особливості цього винаходу, механізм зчленування реалізовується чотирма кульовими опорами і чотирма заглибинами в кожній з першої і другої поверхонь зчленування. Цей винахід описується тут тільки як приклад із посиланнями на прикладені фігури, де: Фіг. 1А являє собою ізометричну проекцію протеза міжхребцевого диска, який розроблений і діє відповідно до ідей цього винаходу, яка показує розведені на певну відстань перший і другий конструктивні елементи; Фіг. 1B являє собою ізометричну проекцію протеза міжхребцевого диска, показаного на Фіг. 1А, в перекиненому положенні; Фіг. 1С являє собою дорсальний вигляд протеза міжхребцевого диска, показаного на Фіг. 1А, в зібраному стані; Фіг. 1D являє собою латеральний вигляд протеза міжхребцевого диска, показаного на Фіг. 1А, в зібраному стані; Фіг. 2А являє собою ізометричну проекцію протеза міжхребцевого диска, показаного на Фіг. 1А, при аксіальній ротації; Фіг. 2В являє собою вигляд зверху протеза міжхребцевого диска, показаного на Фіг. 1А, при аксіальній ротації; Фіг. 2С являє собою частковий розріз протеза міжхребцевого диска, показаного на Фіг. 1А, який показує розташування точок зіткнення між двома конструктивними елементами зчленування при аксіальній ротації; Фіг. 2D являє собою графік, який показує прикладений момент аксіальної ротації і відповідне кутове відхилення від нейтрального положення при аксіальній ротації для протеза міжхребцевого диска, показаного на Фіг. 1А в умовах осьового навантаження; Фіг. 2Е являє собою графік, який показує осьовий підйом (збільшення міжхребцевої відстані) в залежності від кутового відхилення від нейтрального положення при аксіальній ротації для протеза міжхребцевого диска, показаного на Фіг. 1А; Фіг. 3A являє собою дорсальний вигляд протеза міжхребцевого диска, показаного на Фіг. 1А, який зазнає латеральної флексії; 9 Фіг. 3B являє собою вінцевий переріз протеза міжхребцевого диска, показаного на Фіг. 1А, який зазнає латеральної флексії; Фіг. 3C являє собою графік, який показує прикладений момент латеральної флексії і відповідне кутове відхилення від нейтрального положення при латеральній флексії для протеза міжхребцевого диска, показаного на Фіг. 1А, в умовах осьового навантаження; Фіг. 3D являє собою графік, який показує осьовий підйом (збільшення міжхребцевої відстані) в залежності від кутового відхилення від нейтрального положення при латеральній флексії для протеза міжхребцевого диска, показаного на Фіг. 1А; Фіг. 4А являє собою латеральний вигляд протеза міжхребцевого диска, показаного на Фіг. 1А, який зазнає задньої екстензії; Фіг. 4В являє собою сагітальний переріз протеза міжхребцевого диска, показаного на Фіг. 1А, який зазнає задньої екстензії; Фіг. 4С являє собою графік, який показує прикладений момент при флексії або екстензії і відповідне кутове відхилення від нейтрального положення при флексії або екстензії для протеза міжхребцевого диска, показаного на Фіг. 1А, в умовах осьового навантаження; Фіг. 4D являє собою графік, який показує осьовий підйом (збільшення міжхребцевої відстані) в залежності від кутового відхилення від нейтрального положення при флексії або екстензії для протеза міжхребцевого диска, показаного на Фіг. 1А; Фіг. 5А і Фіг. 5В являють собою першу і другу ізометричні проекції із частковим розрізом протеза міжхребцевого диска, показаного на Фіг. 1А, які ілюструють зміщення від нейтрального положення при комбінації 5° флексії, 4° латеральної флексії і 4° аксіальної ротації, ці проекції ілюструють положення трьох точок зіткнення між поверхнями зчленування першого і другого конструктивних елементів; Фіг. 5С являє собою повну ізометричну проекцію протеза міжхребцевого диска, зображеного на Фіг. 1А, яка показує положення зміщення на Фіг. 5А і Фіг. 5В; Фіг. 6А являє собою ізометричну проекцію протеза міжхребцевого диска, показаного на Фіг. 1А, приєднаного до пристрою для введення протеза; Фіг. 6В являє собою збільшене зображення периферичної частини пристрою для введення протеза, показаної на Фіг. 6А, разом із протезом міжхребцевого диска Фіг. 1А; Фіг. 6С являє собою подовжній переріз пристрою для введення протеза і протеза міжхребцевого диска, показаного на Фіг. 6А; Фіг. 6D являє собою збільшене зображення периферичної частини, показаної на Фіг. 6С; Фіг. 7А являє собою ізометричну проекцію альтернативного варіанта здійснення протеза міжхребцевого диска, який розроблений і діє відповідно до ідей цього винаходу, яка показує окремо перший і другий конструктивні елементи і декілька додаткових кульових опор між ними; 96751 10 Фіг. 7В являє собою ізометричну проекцію протеза міжхребцевого диска, зображеного на Фіг. 7А, в перекиненому положенні; Фіг. 7С являє собою аксіальний переріз протеза міжхребцевого диска в зібраному стані, зображеного на Фіг. 7А, в нейтральному положенні; Фіг. 7D являє собою аксіальний переріз протеза міжхребцевого диска в зібраному стані, зображеного на Фіг. 7А, який зазнає аксіальної ротації; Фіг. 7Е являє собою вінцевий переріз протеза міжхребцевого диска в зібраному стані, зображеного на Фіг. 7А, в нейтральному положенні; Фіг. 7F являє собою вінцевий переріз протеза міжхребцевого диска в зібраному стані, зображеного на Фіг. 7А, який зазнає латеральної флексії; Фіг. 7G являє собою ізометричну проекцію варіанта здійснення протеза міжхребцевого диска, зображеного на Фіг. 7А, в розібраному стані, в якому кульові опори замінені на сферичні опуклості, які виступають з одного з конструктивних елементів; Фіг. 7Н являє собою ізометричну проекцію протеза міжхребцевого диска, зображеного на Фіг. 7G, в перекиненому положенні; Фіг. 7I являє собою аксіальний переріз протеза міжхребцевого диска в зібраному стані, зображеного на Фіг. 7G, в нейтральному положенні; Фіг. 7J являє собою аксіальний переріз протеза міжхребцевого диска в зібраному стані, зображеного на Фіг. 7G, який зазнає аксіальної ротації; Фіг. 7K являє собою дорсальний вигляд із частковим розрізом зображеного на Фіг. 7G протеза міжхребцевого диска в зібраному стані, який зазнає латеральної флексії; Фіг. 8А являє собою ізометричну проекцію ще одного альтернативного варіанта здійснення протеза міжхребцевого диска, який розроблений і діє відповідно до ідей цього винаходу, яка показує окремо перший і другий конструктивні елементи; Фіг. 8В являє собою ізометричну проекцію протеза міжхребцевого диска, зображеного на Фіг. 8А, в перекиненому положенні; Фіг. 8С являє собою аксіальний переріз протеза міжхребцевого диска, зображеного на Фіг. 8А; Фіг. 8D являє собою вигляд зверху поверхні зчленування верхнього конструктивного елемента протеза міжхребцевого диска, зображеного на Фіг. 8А; Фіг. 8Е являє собою поперечний переріз в сагітальній площині, показаний на Фіг. 8D лінією Х-Х; Фіг. 8F являє собою сагітальний переріз протеза міжхребцевого диска в зібраному стані, зображеного на Фіг. 8А; Фіг. 9А являє собою ізометричну проекцію ще одного альтернативного варіанта здійснення протеза міжхребцевого диска, який розроблений і діє відповідно до ідей цього винаходу, яка показує окремо перший і другий конструктивні елементи; Фіг. 9В являє собою ізометричну проекцію протеза міжхребцевого диска, зображеного на Фіг. 9А, в перекиненому положенні; Фіг. 9С являє собою вигляд зверху поверхні зчленування нижнього конструктивного елемента протеза міжхребцевого диска, зображеного на Фіг. 9А; 11 Фіг. 9D і Фіг. 9Ε являють собою перерізи відповідно вздовж ліній Х-Х і W-W на Фіг. 9С; Фіг. 9F являє собою вигляд зверху поверхні зчленування верхнього конструктивного елемента протеза міжхребцевого диска, зображеного на Фіг. 9А; Фіг. 9G і Фіг. 9Н являють собою перерізи відповідно вздовж ліній Ζ-Ζ і Υ-Υ на Фіг. 9С; Фіг. 10А являє собою ізометричну проекцію ще одного альтернативного варіанта здійснення протеза міжхребцевого диска, який розроблений і діє відповідно до ідей цього винаходу, яка показує окремо перший і другий конструктивні елементи; Фіг. 10В являє собою ізометричну проекцію зображеного на Фіг. 10А протеза міжхребцевого диска в перекиненому положенні; Фіг. 11А-11С, обговорювані нижче, являють собою схематичні вінцеві перерізи звичайного кульового шарнірного з'єднання на різних стадіях латеральної флексії; Фіг. 11D являє собою графік, який показує прикладений момент латеральної флексії і відповідне кутове відхилення від нейтрального положення для кульового шарнірного з'єднання, показаного на Фіг. 11A, при латеральній флексії; і Фіг. 11E являє собою графік, який показує зміну осьового підйому (збільшення міжхребцевої відстані) в залежності від кутового відхилення від нейтрального положення при латеральній флексії для кульового з'єднання, показаного на Фіг. 11А. Цей винахід являє собою протез міжхребцевого диска, який надає можливість руху навколо трьох осей обертання і забезпечує згасання руху для уникнення зіткнення при закінченні руху при русі навколо кожної із цих осей. Ідеї і принцип дії протезів міжхребцевого диска відповідно до цього винаходу можуть бути краще зрозумілі з посиланням на фігури і супроводжуючий опис. Що стосується фігур, то Фіг. 1А-5С ілюструють перший варіант здійснення пристрою, якому віддається перевага, який розроблений і діє відповідно до ідей цього винаходу, для заміни принаймні частини міжхребцевого диска в хребетному стовпі між кінцевими пластинками тіла першого хребця і тіла другого хребця хребетного стовпа. У загальних рисах, цей і інші варіанти здійснення даного пристрою мають перший конструктивний елемент 100, який має поверхню 22 зіткнення з першим хребцем для зчеплення з кінцевою пластинкою тіла першого хребця, і другий конструктивний елемент 102, який має поверхню 10 зіткнення з другим хребцем для зчеплення з кінцевою пластинкою тіла другого хребця. Перший 100 і другий 102 конструктивні елементи мають відповідні поверхні 104 і 106 зчленування, які утворюють принаймні частину механізму зчленування. Цей механізм зчленування виконаний так, що коли виникає навантаження зі стискною осьовою силою, то (і) поверхні зіткнення з першим і другим хребцями сприймають стискну силу для забезпечення заздалегідь визначеної мінімальної міжхребцевої відстані; (іі) другий конструктивний елемент є рухомим відносно першого конструктивного елемента при русі, який відповідає аксіальній ротації, пе 96751 12 редній флексії і задній екстензії, і латеральній флексії, причому кожний із цих рухів має відповідний діапазон руху; (ііі) міжхребцева відстань зростає як гладка функція кутового відхилення від нейтрального положення принаймні в частині діапазону руху в кожному з напрямів для кожного з рухів: аксіальної ротації, передньої флексії і задньої екстензії, і латеральної флексії, забезпечуючи, таким чином, безударне згасання руху. Іншими словами, різні варіанти здійснення цього винаходу надають протези міжхребцевого диска, які забезпечують опору при осьовому навантаженні, що дає можливість руху навколо трьох осей в тому самому діапазоні, що і для природного руху, і які спричиняють пропорційне збільшення міжхребцевої відстані при русі навколо кожної з осей, з тим щоб досягнути згасання руху для всіх типів руху. Щоб забезпечити викладені властивості, може бути використаний широкий діапазон конфігурацій. Як необмежувальні приклади, нижче будуть розглянуті шість варіантів здійснення, яким віддається особлива перевага. На цьому етапі вже стане зрозуміло, що цей винахід надає ряд особливих переваг в порівнянні з існуючими протезами міжхребцевих дисків. Зокрема, забезпечуючи рух з механічним згасанням в кожному напрямі руху, отримують повний діапазон руху, подібний природному діапазону руху, уникаючи при цьому проблем, пов'язаних із прискореною дегенерацією тканин, викликаною зіткненням при закінченні руху, що характерно для існуючих пристроїв. Ця і інші переваги стануть яснішими з подальшого опису. Бажана величина збільшення міжхребцевої відстані для даного відхилення від нейтрального положення може бути отримана таким чином. Закон збереження енергії (нехтуючи тертям) вимагає, щоб M.da=F.dx, де Μ прикладений момент, який спричиняє обертання навколо заданої осі; - кутове відхилення, викликане прикладеним моментом; F - осьова сила навантаження, прикладеного до опорного пристрою; і x - збільшення міжхребцевої відстані. Таким чином, якщо необхідне відношення між прикладеним моментом і кутовим відхиленням задається заздалегідь визначеною функцією M=f(), і припускається, що прикладене навантаження є заздалегідь визначеною постійною вагою F, необхідне збільшення міжхребцевої відстані може бути виражено як кутова функція: x 1 f .da . F Це відношення може бути визначене для кожного з напрямів руху. Щоб уникнути зіткнення під час руху, функція f() вибирається як безперервна функція, тобто малі зміни кута відповідають малим змінам необхідного моменту (також звана тут без 13 ступеневою), що відрізняє цей винахід від звичайного кульового шарнірного з'єднання, зображеного на Фіг. 11D. Найбільша перевага віддається тому, щоб вибрана функція f() зростала монотонно зі збільшенням величини (в позитивному і негативному напрямах) кутового відхилення принаймні в частині діапазону руху, в якому потрібно згасання руху. Це гарантує, що нахил кривої залежності міжхребцевої відстані від кутового відхилення стає все більш і більш крутим в міру того, як величина відхилення зростає, забезпечуючи тим самим особливо ефективне згасання руху. Коли необхідне співвідношення між міжхребцевою відстанню і кутом відхилення визначене для кожної осі руху, розробляються поверхні зчленування, які забезпечують необхідний рух. Додатковий аналіз показує, що рух в кожному з основних напрямів можна комбінувати, при цьому зберігаючи властивості безударного згасання руху. Крім того, слід потурбуватися, щоб ефективний центр обертання (який може зміщатися під час руху) був сумісний з вертебральною кінематикою, і, зокрема, для уникнення зіткнення суглобових відростків. У наведених нижче прикладах центр кривизни динамічно переміщається під час руху в напрямах латеральної флексії і флексії/екстензії, але відповідно до варіанта, якому віддається перевага, залишається в основному в міжхребцевому просторі. Певна невелика величина лінійного зміщення може також бути використана для імітації фізіологічної поведінки природного міжхребцевого диска, звичайно з інтервалом руху не більше за приблизно 0,5 мм. Потрібно зазначити, що необхідні геометричні параметри можуть бути забезпечені в широкому діапазоні геометричних форм поверхонь зчленування, основною властивістю яких є збільшення підйому в залежності від кутового відхилення. Нижче буде описаний ряд необмежувальних прикладів придатних конструкцій зчленування. Використовуючи інструментальні засоби автоматизованого проектування (САПР), можна виконати точний підбір конструктивних параметрів для кожного типу геометричної форми, з тим щоб досягнути необхідного підйому для кожної величини відхилення. Перед тим як звернутися до інших деталей варіантів здійснення цього винаходу, яким віддається перевага, буде корисно визначити деякі терміни, які вживаються в цьому описі і формулі винаходу. По-перше, звернемося до "нейтрального положення" протеза міжхребцевого диска. Це положення відповідає нормальному недеформованому стану пристрою, коли він імплантований в хребетний стовп. У випадках, коли поверхні зчленування верхнього і нижнього конструктивних елементів мають по суті плоскі периферійні ділянки, нейтральне положення відповідно до варіанта, якому віддається перевага, відповідає по суті паралельному положенню цих плоских ділянок. У варіантах здійснення, яким віддається найбільша перевага, пристрій автоматично зміщається при осьовому навантаженні для того щоб повернутися в нейтральне положення. Термінологія, яка вживається для опису геометрії пристрою за цим винаходом, в основному є 96751 14 медичною термінологією, хоч ця термінологія може часом чергуватися з альтернативною механічною термінологією. Медична термінологія інтерпретується в контексті наміченого розташування і орієнтації, з якими пристрій повинен бути розміщений в тілі, хоч вживана термінологія стосується і пристрою самого по собі. Таким чином, центральна вертикальна площина, яка проходить через пристрій спереду назад, означається терміном "сагітальна", в той час як поперечна вертикальна площина, яка перетинає її, означається терміном "вінцева" і горизонтальна площина означається терміном "аксіальна". Подібним чином, вигляд спереду означається терміном "вентральний", вигляд ззаду - "дорсальний", вигляд збоку - "латеральний", і вигляд зверху - "аксіальний". Що стосується типів руху, то для відповідних рухів тіла перевага тут також віддається звичайній медичній термінології. Таким чином, згинання уперед - це "(передня) флексія", розгинання назад "(задня) екстензія", згинання в боки - "латеральна флексія", обертання в боки - "аксіальна ротація". Для зручності робиться посилання на "осі" відхилення або обертання, а саме: від одного боку до іншого - для флексії або екстензії, спереду назад для латеральної флексії і вертикальна - для аксіальної ротації. Однак потрібно зазначити, що ці рухи являють собою звичайно не чисте обертання навколо фіксованої осі, а швидше більш складні рухи, при яких ефективний центр обертання зміщається під час процесу руху. Потрібно зазначити, що рух, на який робляться посилання в цьому документі, є завжди відносним рухом між першим і другим конструктивними елементами даного пристрою, який відповідає руху хребця, який знаходиться вище, і хребця, який знаходиться нижче, до яких відповідні конструктивні елементи прикріплені. Для зручності рух, на який тут посилаються, розглядається, як якби нижній конструктивний елемент знаходився в фіксованому стані в горизонтальній площині, а рухався верхній конструктивний елемент. Ясно, що коли пристрій імплантований в тіло, то реальною орієнтацією конструктивних елементів буде локальна орієнтація відповідного хребетного сегмента, причому пристрій функціонує у взаємодії з іншими хребетними сегментами (або з природними дисками, або з додатковими пристроями відповідно до цього винаходу), щоб забезпечити повністю всі властивості, необхідні для абсолютного руху хребетного стовпа. Коли робиться посилання на "перший" і "другий" конструктивні елементи, то припускається, що описувані параметри відносяться по черзі до конструктивних елементів, який знаходиться вище (верхнього) і який знаходиться нижче (нижнього), якщо не стверджується протилежне. Всупереч цьому загальному положенню у варіантах здійснення, які мають один конструктивний елемент з одним або декількома виступами і другий конструктивний елемент з одним або декількома заглибинами, в основному перевага віддається варіанту, в якому заглибина знаходиться в розташованому зверху конструктивному елементі і звернена вниз 15 для уникнення накопичення чужорідних речовин, які можуть попасти в це місце. Вживані в контексті тіл хребців терміни "перший" і "другий" вживаються в даному описі і формулі винаходу як неспецифічні позначення, які відсилають до будь-якої пари суміжних тіл хребців, між якими вміщений пристрій за цим винаходом. Насправді, при правильному виборі розмірів і геометричної форми, цей винахід може мати перевагу при використанні в одній ділянці або в багатьох ділянках шийного, грудного і поперекового відділів хребетного стовпа, від місця з'єднання шийних хребців С2/С3 аж до місця нижньої поперекового з'єднання L5/S1. Звернемося тепер до "міжхребцевої відстані". Цей параметр використовується як міра підйому, який має місце під час руху даного пристрою. Міра зміни цього підйому з кутовим відхиленням при осьовому навантаженні відповідає повертальній силі, яка зміщає до нейтрального положення, як це буде описано нижче більш детально. Для чистої аксіальної ротації, для якої верхній і нижній конструктивні елементи залишаються приблизно паралельними, зміна міжхребцевої відстані може бути інтуїтивно зрозуміла як зміна відстані між поверхнями зіткнення хребців. Однак при флексії, екстензії і латеральній флексії міжхребцева відстань повинна визначатися більш ретельно, оскільки нахил одного конструктивного елемента відносно іншого обов'язково створює ділянки конструктивних елементів, які зближуються, і ділянки конструктивних елементів, які віддаляються. Тому міжхребцева відстань визначається як інтервал між центральними ділянками двох поверхонь зіткнення із хребцями. Більш точно використовуваний параметр може бути визначений як осьова компонента лінії, яка тягнеться між центроїдом поверхні зіткнення з першим хребцем і центроїдом поверхні зіткнення з другим хребцем. У цьому контексті "центроїд" означає центр мас тонкої плоскої пластини однакової товщини, яка має спільний контур із всією ділянкою зіткнення з хребцями, але нехтуючи вертикальними параметрами, такими як різні фіксуючі ребра і інші поверхневі параметри. "Осьова компонента" визначається як компонента, паралельна осі чистої аксіальної ротації в нейтральному положенні даного пристрою. Для більшості випадків застосування, коли діапазон руху в кожному напрямі відхилення в градусах характеризується однозначним числом, кути досить малі, так що різниця між визначенням, даним вище, і простою відстанню між центроїдами невелика. Зміна міжхребцевої відстані описується в цьому документі як "гладка функція" кутового відхилення від нейтрального положення. Термін "гладка функція", який вживається в цьому документі, стосується будь-якої функції, яка може бути продиференційована у всіх точках відповідного інтервалу. Іншими словами, зміна міжхребцевої відстані з кутовим відхиленням є "гладкою" в тому значенні, що вона не має різких змін градієнта. У результаті повертальний момент, який діє внаслідок осьового навантаження, який відповідає похідній міжхребцевої відстані по куту, не має яких-небудь різких 96751 16 стрибків, і згасання руху є тому безударним згасанням руху. На закінчення зазначимо, що різні елементи будуть названі як "заглибини" або "виступи". Потрібно зазначити, що термін "заглибина", який вживається в цьому документі, стосується поверхні, для якої, щоб обмежити об'єм, досить накрити його однією площиною. Визначена таким чином заглибина включає в себе заглибини, які можуть мати всередині локально виступні або опукло викривлені елементи, але сідлуваті елементи виключені. Навпаки, "виступ" або "опуклість" поверхні визначається як частина тіла, яка може бути відділена від розташованої нижче поверхні розрізом вздовж однієї площини, незалежно від того, чи має поверхня виступу або опуклості локальні заглибини або увігнуто викривлені елементи. Переходячи тепер до параметрів першого варіанта здійснення більш детально, звернемося до Фіг. 1А-5С, які ілюструють перший варіант здійснення, за яким перший 100 і другий 102 конструктивні елементи мають відповідні поверхні 104 і 106 зчленування, які при безпосередньому контакті утворюють механізм зчленування. При такому варіанті здійснення в основі геометричних форм поверхонь зчленування лежать модифіковані еліптичні профілі. Представляючи подібну геометричну форму, потрібно зазначити, що еліпс, який лежить на "боці", тобто коли його коротка вісь перпендикулярна розташованій нижче поверхні і стикається з нею, по суті має таку властивість, що його центр мас підіймається при будь-якому кутовому відхиленні. Те саме справедливе для двох перпендикулярних осей нахилу у випадку сплюсненого сфероїда. У результаті еліптична або близька до еліптичної геометрична форма може бути використана для певних варіантів здійснення цього винаходу. У першому варіанті здійснення цього винаходу, показаному тут, на першій поверхні 104 зчленування виконаний виступ 32 і на другій поверхні 106 зчленування виконана взаємодіюча з ним заглибина 30. Виступ 32 має таку форму, що в сагітальному перерізі (Фіг. 4В) зовнішня форма виступу характеризується опукло викривленою ділянкою 108 вінця, яка має змінну кривизну з локальним мінімумом кривизни в ділянці вершини 110 вінця. Це забезпечує властивості, схожі з властивостями еліптичної геометричної форми, згаданої вище. Крім того, виступ 32 відповідно до варіанта, якому віддається перевага, характеризується увігнуто викривленою перехідною ділянкою 112 в основі виступу. Бічні поверхні виступу 32, тобто там, де опукла ділянка сполучається з увігнутою перехідною ділянкою, відповідно до варіанта, якому віддається перевага, досягають максимального нахилу (крутості) відносно а розташованої нижче площини поверхні 104 зчленування, який становить менше за 90°, звичайно в інтервалі від приблизно 60° до приблизно 80°. Виступ 32 крім того має таку форму, що в вінцевому перерізі (Фіг. 3B) зовнішня форма виступу 32 також характеризується опукло викривленою ділянкою вінця 108, яка має змінну кривизну з локальним мінімумом кривизни в ділянці вершини 17 110 вінця, з увігнуто викривленою перехідною ділянкою 112 в основі виступу. Як видно на фігурах, ширина виступу 32 в цих двох напрямах різна, причому ширина в вінцевому перерізі відповідно до варіанта, якому віддається перевага, більше, ніж ширина в сагітальному перерізі. На вигляді зверху поверхні 104 зчленування, або в аксіальному перерізі, виступ 32 відповідно до варіанта, якому віддається перевага, має по суті еліптичну зовнішню форму. Іншими словами, вищезазначені форми перерізів в сагітальній і вінцевій площинах відповідно до варіанта, якому віддається перевага, сполучаються гладко через по суті еліптичний профіль. У результаті отриманий округлий, але злегка приплющений зверху, виступ, спрямований назовні від основи, як це краще видно на Фіг. 1А. У випадку, якому віддається перевага та який розглядається тут, взаємодіюча з виступом заглибина 30 утворена по суті еліптичною увігнутістю, тобто частиною еліпсоїда, модифікованого так, щоб отримати опукло викривлену перехідну ділянку 114, яка сполучається з навколишньою ділянкою другої поверхні 106 зчленування. Дія механізму зчленування, утвореного взаємодією поверхонь 104 і 106 зчленування, тепер може бути зрозуміла з посиланням на Фіг. 1С-5С. Звертаючись спочатку до Фіг. 1С і Фіг. 1D, можна бачити, що при нейтральному або близькому до нього положенні протеза міжхребцевого диска сплюснена вершина 110 виступу 32 вміщена в основу заглибини 30, забезпечуючи несучу опору із заданою мінімальною міжхребцевою відстанню. Фіг. 2А-2С ілюструють аксіальну ротацію між конструктивними елементами 100 і 102. Оскільки довгі осі еліптичних форм виступу 32 і заглибини 30 поступово виходять із співвісного положення, похилі бічні поверхні виступу 32 і заглибини 30 насуваються одна на одну, спричиняючи збільшення міжхребцевої відстані. Під час цього руху точка тиску при контакті поверхонь 104 і 106 зчленування відсувається від вершини ділянки вінця, звичайно розділяючись між двома точками 38 контакту, як це показано на частковому розрізі на Фіг. 2С. Прикладений осьовий обертальний момент, який відповідає кожному кутовому відхиленню при осьовому навантаженні 150 Н, показаний на Фіг. 2D, і відповідне збільшення міжхребцевої відстані для кожного кутового відхилення показане на Фіг. 2Е. Потрібно зазначити, що, як згадувалося вище, прикладений момент збільшується монотонно і безперервно в залежності від кута відхилення, в той час як міжхребцева відстань все більш і більш круто зростає (приблизно по параболі). Фіг. 3A і Фіг. 3B ілюструють латеральну флексію між конструктивними елементами 100 і 102. У верхній частині конструктивних елементів тиск в точці контакту переміщається з вершини ділянки вінця на виступі 32 і розподіляється між двома точками контакту, які поступово пересуваються через ділянки більш високої кривизни. Коли рух продовжується, одна з точок контакту пересувається по увігнутій перехідній ділянці (показаній як точки контакту 40 на Фіг. 3B) і сприяє безперервному безударному зміщенню. Прикладений мо 96751 18 мент латеральної флексії, який відповідає кожному кутовому відхиленню при осьовому навантаженні 150 Н, показаний на Фіг. 3C, і відповідне збільшення міжхребцевої відстані для кожного кутового відхилення показане на Фіг. 3D. Тут також прикладений момент збільшується монотонно і безперервно в залежності від кута відхилення, в той час як міжхребцева відстань все більш і більш круто зростає. Фіг. 4А і Фіг. 4В ілюструють задню екстензію між конструктивними елементами 100 і 102. Тут рух по суті подібний латеральній флексії, показаній на Фіг. 3A і Фіг. 3B, з точками 42 контакту, показаними на Фіг. 4В. Прикладений момент задньої екстензії, яка відповідає кожному кутовому відхиленню при осьовому навантаженні 150 Н, показаний на Фіг. 4С, і відповідне збільшення міжхребцевої відстані для кожного кутового відхилення показане на Фіг. 4D. Тут також прикладений момент збільшується монотонно і безперервно в залежності від кута відхилення. У цьому випадку міжхребцева відстань залишається невеликою у відносно великій частині діапазону руху біля нейтрального положення, а потім все більш і більш круто зростає для забезпечення безударного згасання руху в межах встановленого діапазону руху. Попутно потрібно зазначити, що задовільні результати по згасанню руху можуть бути отримані експериментально, незважаючи на значні розходження в формі функціональних залежностей моменту від відхилення. Фактично різні графіки, розглянуті вище, відповідають експериментальним результатам, отриманим для дослідного зразка, сконструйованого методом проб і помилок, використовуючи параметрично визначені поверхні зчленування, які мають основну форму, описану вище. Щоб отримати необхідний профіль підйому при аксіальній ротації, змінні параметри разом з експериментами для твердого тіла поєднуються в основній програмі САПР. Параметри, які відповідають латеральної флексії і флексії/екстензії, були оптимізовані тільки для поверхонь увігнутих перехідних ділянок 112 і для взаємодіючих з ними поверхонь опукло викривлених перехідних ділянок 114, також методом проб і помилок. У результаті була знайдена високоефективна для згасання руху структура, яка має властивість самоцентрування у всіх напрямах руху, незважаючи на значні відмінності в функціональних залежностях моменту від відхилення. Якщо потрібно, можуть бути використані більш складні інструментальні засоби САПР і/або чисельні методи, щоб одночасно оптимізувати параметри для різних типів руху. Як видно на Фіг. 5А-5С, згаданих раніше, можна бачити, що механізми зчленування за цим винаходом відповідно до варіанта, якому віддається перевага, надають можливість зміщення конструктивних елементів 102 і 100 при русі, який відповідає поєднанню аксіальної ротації, передньої флексії або задньої екстензії і латеральної флексії. З метою ілюстрації на Фіг. 5А-5С показаний протез міжхребцевого диска з конструктивними елементами, зміщеними від нейтрального положення при поєднанні 5° флексії, 4° латеральної флексії і 4° аксіальної ротації. Загалом, складні рухи, такі як 19 цій, дають в результаті три точки контакту, які показані як точки 44 на часткових розрізах на Фіг. 5А і Фіг. 5В. Даний пристрій демонструє одночасно безударне згасання руху і утворення повертальних сил в кожній з площин руху. Звернемося тепер до інших особливостей першого варіанта здійснення цього винаходу. Фіг. 1А і Фіг. 1B демонструють варіант здійснення, якому віддається перевага, при якому поверхня 10 зіткнення з розташованою вище кінцевою пластинкою і поверхня 22 зіткнення з розташованою нижче кінцевою пластинкою виконані так, щоб досягнути надійного закріплення між верхньою і нижньою кінцевими пластинками хребців, з подальшою остеоінтеграцією для подальшого поліпшення утримання кісток пристроєм. Основний профіль поверхні 10 зіткнення з розташованою вище кінцевою пластинкою має слабу увігнутість в латеролатеральному (LL) напрямі 26, і основну лінію ступінчастої опуклості в передньо-задній площині, показаній віртуальною лінією 28. Потрібно вважати, що ця специфічна форма має переваги для сполучення з відповідною увігнутістю розташованої вище цервікальної кінцевої пластинки, до якої прикріпляється поверхня контакту 10 кінцевої пластинки. Ступінчаста опуклість 28 забезпечує пристрою підйом приблизно на 1-1,5 мм вище в передньому положенні в порівнянні із заднім положенням, таким чином сприяючи поверненню хребців і проміжків між ними в їхнє колишнє взаємне положення як в міжхребцевому просторі, так і в розташуванні сегмента загалом. Така форма сприяє також забезпеченню зчеплення, що зменшує ризик зміщення на ранній стадії закріплення. LL увігнутість 26 допомагає вибрати найбільш відповідний загальний анатомічний профіль для розташованої вище кінцевої пластинки цервікального хребця і уникнути потенційних невеликих латеральних зміщень на ранній стадії закріплення після процедури імплантації. Поверхня 22 зіткнення з розташованою нижче кінцевою пластинкою сконструйована так, щоб відтворити опуклість в LL напрямі для полегшення акомодації до анатомічної площини поверхні розташованого нижче цервікального хребця. Розташований нижче конструктивний елемент сконструйований з можливістю імплантування між некорвертебральними відростками і можливістю запобігання за допомогою цих кісткових структур від латерального зміщення. У доповнення до загальних профілів, обидві поверхні 10 і 22 зіткнення з кінцевими пластинками мають ребра, які виступають уперед, для поліпшення закріплення пристрою в кінцевих пластинках хребців. Задні закріпні ребра 14 на розташованій зверху поверхні 10 орієнтовані латеро-латерально, вони сконструйовані з можливістю вставляння між кінцевими пластинками хребців для надання опору будь-яким можливим передньо-заднім зміщенням. На кінцях і в проміжних зламах ребер 14 сформовані трикутні поверхні 16, які чинять опір можливим небажаним латеральним зміщенням. Передній закріпний виступ 12 сконструйований з можливістю вставляння в кінцеву пластинку хребця для поліпшення закріплення. Загалом цей виступ має трапецієподібну конфігу 96751 20 рацію, щоб входити в кінцеву пластинку хребця як клин. Основа виступу 12 збільшена в порівнянні з його верхньою поверхнею, щоб досягнути ефекту "пресової посадки", яка буде фіксувати імплантат, досягаючи швидкої остеоінтеграції. Для поперекового хребця поверхні зачеплення обох кінцевих пластинок відповідно до варіанта, якому віддається перевага, двоопуклі з подібною до описаної вище структурою виступів, які посилюють закріплення. Двоопукла форма сконструйована так, щоб здійснити "пресову посадку" у загалом увігнуті верхню і нижню увігнуті поверхні поперекового хребця, таким чином сприяючи запобіганню зміщенню і поліпшуючи опору для кісток. Протез міжхребцевого диска, показаний на Фіг. 1А, повністю, або принаймні його більша частина, імплантується в міжхребцевий простір. У результаті всі його зовнішні межі (контури), які знаходяться зверху і знизу, так само як весь об'ємний контур, відповідно до варіанта, якому віддається перевага, не виступають за кортикальні межі кінцевих пластинок. Міжхребцевий простір, який використовується для розміщення природного хрящового диска, буде в такій самій мірі вміщати протез міжхребцевого диска. Він входить в тісний контакт із кінцевими пластинками хребців і може бути імплантований в один, або більш ніж один, міжхребцевий простір (включаючи наступні один за одним міжхребцеві простори). У додання до цього, або як альтернатива описаним вище особливостям, контакт і закріплення можуть бути поліпшені за допомогою застосування додаткових технологій, які включають, але без обмеження ними, використання гвинтів для кріплення поверхонь до кінцевих пластинок хребців; забезпечення поверхонь мікро- або наношорсткістю; і використання остеокондуктивних або остеоіндуктивних біологічно сумісних матеріалів, таких як кераміка, метали або біологічно активні речовини, на поверхнях зіткнення з кінцевими пластинками, щоб сприяти або викликати проліферацію кісток, або іншим способом поліпшити завершення остеоінтеграції. Розміри цервікальних імплантатів вибрані відповідно до звичайних розмірів наміченого місця імплантації. У разі застосувань в цервікальній ділянці передньо-задні (АР) розміри звичайно становлять 15 мм і для розташованої вище, і для розташованої нижче кінцевих пластинок. У LL напрямі розміри звичайно знаходяться в інтервалі приблизно 18-24 мм для розташованої нижче площини міжхребцевого простору і приблизно 17-22 мм для розташованої вище площини міжхребцевого простору. У разі застосувань в поперековій ділянці звичайно використовуються такі розміри: біля 25 мм в АР напрямі і 30-38 мм в LL напрямі. Після імплантації пристрою в міжхребцевий простір підтримується необхідна мінімальна міжхребцева відстань, звичайно в інтервалі 6-8 мм. Для деяких варіантів здійснення, яким віддається перевага, зокрема, у разі застосування в поперековій і цервікальній ділянках, відновлюється природна величина лордозу (звичайно 4-6°). У показаному тут варіанті здійснення, якому віддається 21 перевага, наявність переднього закріпного виступу 12 і відносно низької задньої ділянки у другій поверхні 10 зіткнення з хребцем спільно забезпечують похилий повний профіль зіткнення з хребцем, таким чином додаючи протезу міжхребцевого диска ефективний клиноподібний профіль, що забезпечує вищезазначений лордоз. Інтервали руху, яким віддається перевага (ROM), в яких вищезазначені механічні властивості пристрою за цим винаходом зберігаються, становлять звичайно біля 9° аксіальної ротації від нейтрального положення в будь-якому напрямі, і біля 8° в кожному з напрямів латеральної флексії, передньої флексії і задньої екстензії. Ці значення можуть бути трохи зменшені під час подвійного руху в більш ніж одному напрямі, оскільки це справедливе також для природного з'єднання. Однак інтервалів аксіальної ротації і латеральної флексії в діапазоні біля 4° або 5° більш ніж досить, щоб забезпечити клінічно значущі інтервали руху. Фактичні інтервали руху для кожного конкретного пацієнта визначаються такими чинниками, як стан суглобових відростків і інших навколишніх тканин. Навіть коли доступні менші інтервали руху, цей винахід ще надає функції безударного згасання руху і утворення повертальних сил в такому інтервалі руху. Розглянемо тепер введення протеза міжхребцевого диска за цим винаходом. На Фіг. 1А-1С показані розташований вище проріз 18 тримача і розташований нижче проріз 20 тримача, розташовані на передньому боці імплантата. За допомогою цих прорізів пристрій за цим винаходом сполучається з пристроєм 120 для введення протеза (Фіг. 6A-6D), який має таку форму, щоб утримувати даний пристрій, і підтримувати перший і другий конструктивні елементи в нейтральному положенні під час введення в міжхребцевий простір. Додаткові деталі цього пристрою для введення і хірургічна техніка будуть зрозумілі фахівцям в цій галузі і тут не будуть наведені. Перший 100 і другий 102 конструктивні елементи можуть бути виготовлені з будь-яких зносостійких біологічно сумісних матеріалів. Відповідно до варіанта, якому віддається перевага, перший і другий конструктивні елементи являють собою по суті тверді тіла. Матеріалами, яким віддається перевага, є, але без обмеження ними, металеві, керамічні і полімерні матеріали. Конкретними прикладами, яким віддається перевага, металевих матеріалів є, але без обмеження ними, неіржавіюча сталь, титан, сплави титану, такі як титанмолібден-цирконій-залізо (TMZF), і кобальтхромові сплави, такі як кобальт-хром-молібден. Факультативно для збільшення зносостійкості, зменшення тертя або забезпечення будь-яких інших необхідних механічних або медичних властивостей поверхні зчленування цих конструктивних елементів можуть бути поверхнево оброблені або на них можуть бути нанесені покриття. Як необмежувальні приклади відповідних матеріалів покриття, корисних для зменшення тертя і зносу, можна навести, без обмеження ними, CrN (нітрид хрому) і інші покриття на основі хрому, TiN (нітрид титану), алмаз і алмазоподібні матеріали. 96751 22 Звернемося тепер до Фіг. 7A-7F, які ілюструють альтернативний підхід до здійснення принципів цього винаходу. Пристрій, показаний на них, є функціональним аналогом варіанта здійснення, показаного на Фіг. 1А, який забезпечує поступове безударне згасання руху і створює повертальні сили у всіх напрямах руху шляхом збільшення міжхребцевої відстані. Цей варіант здійснення відрізняється від представленого на Фіг. 1А в основному геометричною структурою. У цьому випадку обидві поверхні зчленування 104 і 106 мають множину заглибин 130, 132, і механізм зчленування, крім того, включає в себе відповідну кількість опорних елементів 64, кожний з яких захоплюється між двома розташованими один проти одного заглибинами 130 і 132. У показаному тут варіанті здійснення, якому віддається особлива перевага, опорні елементи 64 реалізовані як кульові опори, таким чином забезпечуючи поверхню розділу, яка обертається між верхнім і нижнім конструктивними елементами з надзвичайно низьким тертям. У цьому варіанті здійснення збільшення міжхребцевої відстані досягається за допомогою зміщення положень заглибин 130 відносно заглибин 132. У показаному тут варіанті здійснення, якому віддається особлива перевага, заглибини 130 і 132 всі є частково сферичними заглибинами з радіусом кривизни більшим, ніж у кульових опор 64, із заглибинами 130, які додатково зміщаються в бік від заглибин 132. У результаті в нейтральному положенні, показаному на Фіг. 7С і Фіг. 7Е, кульові опори 64 розміщені зі зміщенням від центра відносно кожної заглибини, які стикаються з опорою протилежними лицьовими поверхнями вздовж діаметра кожної кулі в точках 62, як це показано на фігурі. Під час руху відносне зміщення від центра пар розташованих одна проти одної пар заглибин 130 і 132 міняється. Фіг. 7D ілюструє остаточне положення і нові точки 58 зіткнення для аксіальної ротації 5°. Фіг. 7F ілюструє подібним чином латеральну флексію 4°. У кожному випадку принаймні деякі з кульових опор 64 досягають положення, де зіткнення із заглибинами має місце в більш високій точці стінок заглибин 130 і 132, таким чином спричиняючи необхідне збільшення міжхребцевої відстані. Потрібно зазначити, що кількість заглибин і кульових опор в цьому варіанті здійснення може змінюватися. Звичайно для забезпечення стійкості використовується щонайменше три опори і відповідні пари заглибин. Можлива більша кількість опор, але це може дуже обмежити розміри кожної опори, і, отже, діапазон можливого руху. Треба вважати, що варіант здійснення із чотирма кулями, показаний тут, має особливі переваги завдяки симетрії діапазону руху вздовж основних осей. У цьому випадку розташування заглибин буде квадратним або прямокутним, відповідно до варіанта, якому віддається перевага, з квадратною симетрією, оскільки тоді вони надають симетричний діапазон руху при латеральній флексії і флексіїекстензії. Наведеному тут варіанту здійснення зі сторонами квадрата, паралельними основним осям латеральної флексії і флексії-екстензії, віддається особлива перевага, хоч також можливе 23 таке розташування, при якому діагоналі паралельні цим осям. Хоч припускається, що описані тут частково сферичні заглибини мають особливі переваги, потрібно брати до уваги, що заглибини 130 і 132 можуть бути реалізовані в інших формах для досягнення різних профілів руху, включаючи, але без обмеження ними, еліпсоподібні заглибини або частково асиметричні "яйцеподібні" заглибини. Ці заглибини відповідно до варіанта, якому віддається перевага, хоча і необов'язково, пов'язані з поворотом на 180° відносно центра кульової опори. Звернемося тепер до Фіг. 7G-7K, які ілюструють варіант здійснення, зображений на Фіг. 7А, в якому другий конструктивний елемент 102 залишається незмінним, включаючи заглибину 132, в той час як кульові опори 64 і заглибина 130 замінені частково сферичними виступами 48, які становлять єдине ціле з першим конструктивним елементом 100. Цей варіант діє подібно варіанту, зображеному на Фіг. 7A-7F, хоч рух в цьому випадку є контактом не при котінні, а при ковзанні, і діапазон руху для даного розміру заглибин 132 буде зменшений. Зрозуміло, що різні конструктивні параметри можуть змінюватися для досягнення бажаного інтервалу руху. У всіх інших відношеннях конструкція і дія цих варіантів здійснення можуть бути повністю зрозумілі аналогічно з описаним вище варіантом здійснення, зображеним на Фіг. 1A-6D. Звернемося тепер до Фіг. 8A-8F, на яких зображений ще один варіант здійснення цього винаходу, концептуально подібний варіанту, зображеному на Фіг. 7G-7K. Як вже згадувалося, форма заглибин на другій поверхні 106 зчленування не обмежується частково сферичними заглибинами, описаними вище. По суті, потрібно зазначити, що звернені назовні ділянки заглибин 132, ближче усього розташовані до аксіальної осі механізму зчленування, зовсім не можуть звичайним чином повністю контактувати з виступами 48 під час роботи. Тому можна міняти форму заглибин і, як показано тут, об'єднувати заглибини в єдине заглибину 68 відповідної форми. Звідси випливає, що єдиними ділянками заглибини 68, для яких форма має вирішальне значення, є ділянки поблизу кінців Х-подібної ділянки, де відбувається контакт із виступами, позначеними тут 66. Зрозуміло, що ці ділянки контакту можуть бути неповними сферами, неповними еліпсами, або мати будь-яку іншу вибрану форму, яка забезпечує необхідну динаміку. 96751 24 Цей варіант здійснення відрізняється також від варіанта, зображеного на Фіг. 7G-7K, тим, що виступи 48 і відповідні заглибини 68 розвернені в діагональному відношенні на 45° відносно розташування, показаного на Фіг. 7G-7K. У всіх інших відношеннях конструкція і дія даного варіанта здійснення можуть бути повністю зрозумілі аналогічно з варіантами здійснення, описаними вище. Звернемося тепер до Фіг. 9А-9Н, які ілюструють альтернативний варіант здійснення, який має єдиний виступ, сформований двома перпендикулярними ребрами 80 і 82, і взаємодіюча з ним єдина заглибина 70. У цьому випадку основні зовнішні опорні поверхні ребер 80 і 82 по суті, як видно на Фіг. 9D і Фіг. 9F, округлі, як частина звичайних з'єднань на кульових опорах. У ребра 82 частина округлого профілю, яка не впливає істотно на опорну функцію, зрізана, щоб полегшити виготовлення. Необхідне збільшення міжхребцевої відстані тут досягається за допомогою відповідної форми перерізу ребер 80 і 82, також як взаємодіючими бічними частинами каналів, утворених всередині заглибини 70, як це краще видно на Фіг. 9F-9H. Таким чином, при флексїї-екстензії в основному ребро 82, яке простягається з одного боку на інший і взаємодіє з прилеглими поверхнями заглибини 70, є відповідальним за зростання міжхребцевої відстані, в той час як при латеральній флексії підйом викликає ребро 80, яке простягається спереду назад. При аксіальній ротації в зростання міжхребцевої відстані дають внесок звичайно три або чотири точки зіткнення. Нарешті, звернемося до Фіг. 10А і Фіг. 10В, які демонструють варіант здійснення, який концептуально являє собою комбіновану схему варіантів здійснення, показаних на Фіг. 1А і Фіг. 9А. Більш точно, цей варіант здійснення має повністю еліптичну геометричну форму, по суті описану вище з посиланням на Фіг. 1А. Крім того, виступ в цьому випадку також має множину бічних ділянок із заглибинами, і взаємодіючі з ним заглибини мають відповідну кількість ділянок із ребрами, які дають додаткові поверхні зіткнення, подібні показаним на Фіг. 9А. Така конфігурація надає більшу кількість конструктивних параметрів, які можуть регулюватися у випадку, коли потрібно оптимізувати профіль міжхребцевого проміжку для всіх напрямів руху одночасно. Потрібно враховувати, що всі наведені вище описи є тільки прикладами, і багато які інші варіанти здійснення можливі в рамках цього винаходу, як визначено в прикладеній формулі винаходу. 25 96751 26 27 96751 28 29 96751 30 31 96751 32 33 96751 34 35 96751 36 37 Комп’ютерна верстка Е. Гапоненко 96751 Підписне 38 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюIntervertebral disc implant
Автори англійськоюTauber Michael
Назва патенту російськоюПротез межпозвоночного диска
Автори російськоюТаубер Майкл
МПК / Мітки
МПК: A61F 2/44
Мітки: протез, диска, міжхребцевого
Код посилання
<a href="https://ua.patents.su/19-96751-protez-mizhkhrebcevogo-diska.html" target="_blank" rel="follow" title="База патентів України">Протез міжхребцевого диска</a>
Протез міжхребцевого диска
Номер патенту: 47922
Опубліковано: 15.07.2002
Автори: Лобунько Віктор Васильович, Слинько Євген Ігорович, Зозуля Юрій Панасович, Вербов Вадим Віталієвич, Деркач Валерій Михайлович
Мітки: диска, протез, міжхребцевого
Формула / Реферат:
Протез міжхребцевого диска, що складається з трьох елементів, два з яких виконані у вигляді металічних пластин із сферичними заглибленнями на робочій поверхні та рухомого неметалічного вкладиша між ними, що має форму двоопуклої лінзи, який відрізняється тим, що по зовнішньому краю вкладиш має рівновиступний від краю бортик, висота якого менша за товщину вкладиша, а діаметр більше діаметра сферичного заглиблення на робочій поверхні пластин,...
Трансплантат міжхребцевого диска
Номер патенту: 24201
Опубліковано: 25.06.2007
Автори: Дєдух Нінель Василівна, Радченко Володимир Олександрович, Костицька Ольга Мілетієвна, Малишкіна Світлана Володимирівна
Мітки: міжхребцевого, трансплантат, диска
Формула / Реферат:
Трансплантат міжхребцевого диска, що містить клітини, який відрізняється тим, що являє собою суспензію, яка складається із клітин хрящового диферону і макромолекул матриксу, одержаних в процесі культивування клітин скелетогенної мезенхіми в культурі високого ступеня щільності.
Спосіб пункційного доступу до міжхребцевого диска l5-s1
Номер патенту: 94342
Опубліковано: 26.04.2011
Автори: Шимон Василь Михайлович, Пантьо Валерій Іванович, Пічкар Іван Йосипович, Холін Володимир Вікторович
МПК: A61M 5/32, A61M 31/00, A61B 17/00, A61B 17/34
Мітки: доступу, диска, спосіб, пункційного, міжхребцевого, l5-s1
Формула / Реферат:
Спосіб пункційного доступу до міжхребцевого диска L5-S1, який включає доступ за допомогою пункційної голки, який відрізняється тим, що доступ здійснюють за допомогою пункційної голки довжиною 16 см, плавно зігнутої посередині під кутом 50°, при цьому прокол шкіри здійснюють, відступивши 3-4 см від міжостистого проміжку L5-S1 до крила здухвинних кісток, а голку проводять під кутом 20-30° до горизонтальної площини, а коли згин голки починає...
Ендопротез міжхребцевого диска
Номер патенту: 16973
Опубліковано: 15.09.2006
Автори: Нечипорук Олексій Борисович, Зозуля Андрій Іванович, Синицький Сергій Іванович, Зозуля Іван Саввович, Нечипорук Олег Олексійович, Регуш Андрій Васильович
МПК: A61F 2/44
Мітки: диска, міжхребцевого, ендопротез
Формула / Реферат:
1. Ендопротез міжхребцевого диска, що містить дві опозиційно розташовані частини з контактними поверхнями і мають вигнуту від середини сферичну поверхню та випуклий проміжний елемент, який відрізняється тим, що опозиційно розташовані частини з контактними поверхнями виконані у вигляді розрізаного повздовжньо навпіл циліндра із отворами і різьбою на циліндричній контактній поверхні.2. Ендопротез за п. 1, який відрізняється тим, що...
Спосіб пункційного доступу до міжхребцевого диска l5-s1

Номер патенту: 52757
Опубліковано: 10.09.2010
Автори: Шимон Василь Михайлович, Пантьо Валерій Іванович, Холін Володимир Вікторович, Пічкар Іван Йосипович
МПК: A61B 17/00
Мітки: доступу, диска, спосіб, пункційного, міжхребцевого, l5-s1
Формула / Реферат:
Спосіб пункційного доступу до міжхребцевого диска L5-S1, який включає доступ за допомогою пункційної голки, який відрізняється тим, що доступ здійснюється за допомогою пункційної голки довжиною 16 см, плавно зігнутої посередині під кутом 50°, при цьому прокол шкіри здійснюють, відступивши 3-4 см від міжостистого проміжку L5-S1 до крила здухвинних кісток, а голку проводять під кутом 20-30° до горизонтальної площини, а коли згин голки починає...
Попередній патент: Імплантант для терапії внутрішніх стінок резекційної порожнини
Випадковий патент: Сорбційно-фільтруючий матеріал