Спосіб управління літальним апаратом
Номер патенту: 17957
Опубліковано: 17.06.1997
Автори: Шабохін Віктор Олексійович, Бушуєв Євген Іванович, Конюхов Станіслав Миколаєвич, Ільясов Микола Халікович
Формула / Реферат
1. Способ управления летательным аппаратом, включающий операции по измерению текущих параметров движения, определению рассогласования измеренных параметров движения от программных и формированию управляющего сигнала пропорционально величине рассогласования, отличающийся тем, что параметры движения измеряют в существующем, искусственно созданном глобальной спутниковой системой навигационном поле, с помощью радиоприемных навигационных устройств.
2. Способ по п.1, отличающийся тем, что радиоприемные навигационные устройства и вычислительные устройства включают до старта летательного аппарата.
Текст
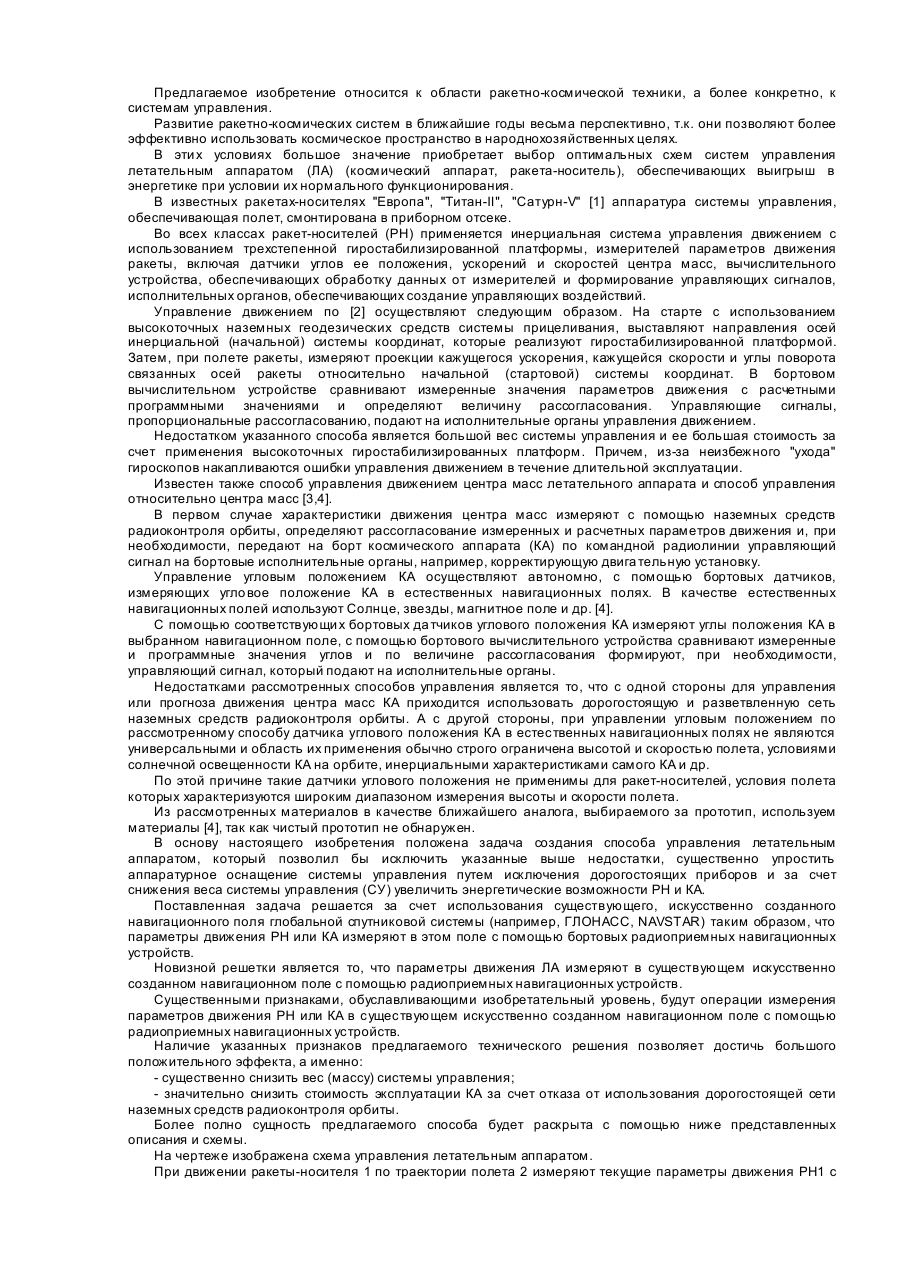
Предлагаемое изобретение относится к области ракетно-космической техники, а более конкретно, к системам управления. Развитие ракетно-космических систем в ближайшие годы весьма перспективно, т.к. они позволяют более эффективно использовать космическое пространство в народнохозяйственных целях. В эти х условиях большое значение приобретает выбор оптимальных схем систем управления летательным аппаратом (ЛА) (космический аппарат, ракета-носитель), обеспечивающих выигрыш в энергетике при условии их нормального функционирования. В известных ракетах-носителях "Европа", "Титан-ΙI", "Сатурн-V" [1] аппаратура системы управления, обеспечивающая полет, смонтирована в приборном отсеке. Во всех классах ракет-носителей (РН) применяется инерциальная система управления движением с использованием трехстепенной гиростабилизированной платформы, измерителей параметров движения ракеты, включая датчики углов ее положения, ускорений и скоростей центра масс, вычислительного устройства, обеспечивающих обработку данных от измерителей и формирование управляющих сигналов, исполнительных органов, обеспечивающих создание управляющих воздействий. Управление движением по [2] осуществляют следующим образом. На старте с использованием высокоточных наземных геодезических средств системы прицеливания, выставляют направления осей инерциальной (начальной) системы координат, которые реализуют гиростабилизированной платформой. Затем, при полете ракеты, измеряют проекции кажущегося ускорения, кажущейся скорости и углы поворота связанных осей ракеты относительно начальной (стартовой) системы координат. В бортовом вычислительном устройстве сравнивают измеренные значения параметров движения с расчетными программными значениями и определяют величину рассогласования. Управляющие сигналы, пропорциональные рассогласованию, подают на исполнительные органы управления движением. Недостатком указанного способа является большой вес системы управления и ее большая стоимость за счет применения высокоточных гиростабилизированных платформ. Причем, из-за неизбежного "ухода" гироскопов накапливаются ошибки управления движением в течение длительной эксплуатации. Известен также способ управления движением центра масс летательного аппарата и способ управления относительно центра масс [3,4]. В первом случае характеристики движения центра масс измеряют с помощью наземных средств радиоконтроля орбиты, определяют рассогласование измеренных и расчетных параметров движения и, при необходимости, передают на борт космического аппарата (КА) по командной радиолинии управляющий сигнал на бортовые исполнительные органы, например, корректирующую двига тельную установку. Управление угловым положением КА осуществляют автономно, с помощью бортовых датчиков, измеряющих угло вое положение КА в естественных навигационных полях. В качестве естественных навигационных полей используют Солнце, звезды, магнитное поле и др. [4]. С помощью соответствующи х бортовых да тчиков углового положения КА измеряют углы положения КА в выбранном навигационном поле, с помощью бортового вычислительного устройства сравнивают измеренные и программные значения углов и по величине рассогласования формируют, при необходимости, управляющий сигнал, который подают на исполнительные органы. Недостатками рассмотренных способов управления является то, что с одной стороны для управления или прогноза движения центра масс КА приходится использовать дорогостоящую и разветвленную сеть наземных средств радиоконтроля орбиты. А с другой стороны, при управлении угловым положением по рассмотренному способу датчика углового положения КА в естественных навигационных полях не являются универсальными и область их применения обычно строго ограничена высотой и скоростью полета, условиями солнечной освещенности КА на орбите, инерциальными характеристиками самого КА и др. По этой причине такие датчики углового положения не применимы для ракет-носителей, условия полета которых характеризуются широким диапазоном измерения высоты и скорости полета. Из рассмотренных материалов в качестве ближайшего аналога, выбираемого за прототип, используем материалы [4], так как чистый прототип не обнаружен. В основу настоящего изобретения положена задача создания способа управления летательным аппаратом, который позволил бы исключить указанные выше недостатки, существенно упростить аппаратурное оснащение системы управления путем исключения дорогостоящих приборов и за счет снижения веса системы управления (СУ) увеличить энергетические возможности РН и КА. Поставленная задача решается за счет использования существующего, искусственно созданного навигационного поля глобальной спутниковой системы (например, ГЛОНАСС, NAVSTAR) таким образом, что параметры движения РН или КА измеряют в этом поле с помощью бортовых радиоприемных навигационных устройств. Новизной решетки является то, что параметры движения ЛА измеряют в существующем искусственно созданном навигационном поле с помощью радиоприемных навигационных устройств. Существенными признаками, обуславливающими изобретательный уровень, будут операции измерения параметров движения РН или КА в существующем искусственно созданном навигационном поле с помощью радиоприемных навигационных устройств. Наличие указанных признаков предлагаемого технического решения позволяет достичь большого положительного эффекта, а именно: - существенно снизить вес (массу) системы управления; - значительно снизить стоимость эксплуатации КА за счет отказа от использования дорогостоящей сети наземных средств радиоконтроля орбиты. Более полно сущность предлагаемого способа будет раскрыта с помощью ниже представленных описания и схемы. На чертеже изображена схема управления летательным аппаратом. При движении ракеты-носителя 1 по траектории полета 2 измеряют текущие параметры движения РН1 с помощью навигационного поля 3 и радиоприемных навигационных устройств 4, расположенных на космическом аппарате 5 (в приемные устройства входят антенно-фидерные устройства (АФУ) и радиотехнические средства). Определяют рассогласование измеренных параметров движения летательного аппарата от программных и формируют управляющий сигнал пропорционально величине рассогласования с помощью БЦВМ. При этом, с целью уменьшения ошибок управления, радиоприемные навигационные устройства включают до старта РН, при точно известных геодезических координатах и угловом положении РН и КА, и путем математической обработки данных многократных навигационных измерений определяют статические (постоянные) поправки к измерениям по предлагаемому способу для различных положений спутников глобальных навигационных систем относительно радиоприемных навигационных устройств летательного аппарата. Предлагаемый способ может быть реализован также только для управления спутником или только для управления ракетой-носителем.
ДивитисяДодаткова інформація
Автори англійськоюBushuiev Yevhen Ivanovych, Iliasov Mykola Khalikovych, Koniukhov Stanislav Mykolaiovych, Shabokhin Viktor Oleksiiovych
Автори російськоюБушуев Евгений Иванович, Ильясов Николай Халикович, Конюхов Станислав Николаевич, Шабохин Виктор Алексеевич
МПК / Мітки
МПК: F41G 7/00
Мітки: управління, апаратом, спосіб, літальним
Код посилання
<a href="https://ua.patents.su/2-17957-sposib-upravlinnya-litalnim-aparatom.html" target="_blank" rel="follow" title="База патентів України">Спосіб управління літальним апаратом</a>
Система управління літальним апаратом
Номер патенту: 13078
Опубліковано: 28.02.1997
Автори: Орепер Володимир Якович, Конев Валерій Тимофійович, Абрамов Євген Ілліч
МПК: B64C 13/00
Мітки: апаратом, система, літальним, управління
Формула / Реферат:
(57) 1. Система управления летательным аппаратом, содержащая рычаг управления, электродистанционный канал управления, включающий вычислитель, сервопривод и датчик усилий, установленный между рычагом и проводкой управления, и механический канал управления, включающий проводку управления и резервную загрузочную пружину и привод руля, отличающаяся тем, что в ней параллельно рычагу управления к датчику усилий подсоединено пружинное устройство...
Пристрій управління електромагнітним приводом для дистанційного управління автоматичним вимикачем
Номер патенту: 17758
Опубліковано: 20.05.1997
Автори: Дашков Андрій Георгійович, Гущін Владислав Якович, Костюк Володимир Андрійович
МПК: H01F 7/06, H01H 47/00
Мітки: вимикачем, пристрій, управління, електромагнітним, дистанційного, приводом, автоматичним
Формула / Реферат:
Устройство управления электромагнитным приводом для дистанционного управления автоматическим выключателем, содержащее аппарат включения с замыкающим и размыкающим контактами, аппарат отключения с замыкающим контактом, два конечных выключателя, выводы для подключения размыкающего блок-контакта автоматического выключателя, выводы для подключения катушек электромагнитов привода, выводы для подключения источника питания, выводы для подключения...
Спосіб автоматичного управління процесом екстрагування цукру з буряка
Номер патенту: 9105
Опубліковано: 30.09.1996
Автори: Фельдман Аркадій Ісакович, Тверітіна Наталія Олександрівна, Ладанюк Анатолій Петрович, Негода Федір Валентинович, Ліпєц Антон Адамович, Циганков Сергій Петрович
МПК: C13D 3/10
Мітки: спосіб, екстрагування, управління, автоматичного, цукру, процесом, буряка
Формула / Реферат:
Способ автоматического управления процессом экстрагирования сахара из свеклы, предусматривающий повышение температуры сокостружечной смеси по зонам аппарата и дозированную подачу антисептика в зависимости от расхода свекловичной стружки, отличающийсятем, что, с целью повышения выхода сахара, определяют в застойных зонах диффузионного аппарата скорость потребления кислорода микроорганизмами, находящимися в экстрагенте, а дозированную подачу...
Спосіб автоматичного управління комбінованим підводом екстрагенту в похилі двухшнекові дифузійні апарати
Номер патенту: 9101
Опубліковано: 30.09.1996
Автори: Ладанюк Анатолій Петрович, Міненко Євген Вікторович, Негода Федір Валентинович, Фельдман Аркадій Ісакович
МПК: C13D 1/10
Мітки: спосіб, автоматичного, підводом, двухшнекові, апараті, екстрагенту, управління, дифузійні, похилі, комбінованим
Формула / Реферат:
Способ автоматического управления комбинированным подводом экстрагента в наклонные двухшнековые диффузионные аппараты, предусматривающий контроль уровней сокостружечной смеси в хвостовой части аппарата и комбинированный подвод экстрагента, отличающийся тем, что, с целью увеличения выхода сахара й повышения точности регулирования, измеряют ток нагрузки электроприводов и перепад уровней в хвостовой части аппарата и регулируют соотношение...
Пристрій для визначення відносної кутової швидкості при коливальному процесі управління орієнтацією космічного апарата
Номер патенту: 10788
Опубліковано: 25.12.1996
Автори: Карпачов Юрій Андрійович, Павловський Михайло Антонович, Анупрієнко Генадій Єфремович
МПК: B64G 1/24
Мітки: апарата, управління, процесі, відносної, орієнтацією, кутової, космічного, швидкості, коливальному, пристрій, визначення
Формула / Реферат:
1. Устройство определения относительной угловой скорости при колебательном процессе управления ориентацией космического аппарата, содержащее измеритель абсолютной угловой скорости, отличающееся тем, что введены датчик ориентации, устройство определения экстремума, запоминающее устройство и вычитающее устройство, причем выход датчика ориентации через устройство определения экстремума подсоединен к первому входу запоминающего устройства,...
Попередній патент: Секатор
Наступний патент: Спосіб одержання бактеріородопсину
Випадковий патент: Фотолюмінофор на основі бромистого кадмію