Спосіб регулювання параметрів технологічного устаткування машзалу енергоблока атомної електростанції
Номер патенту: 18695
Опубліковано: 25.12.1997
Автори: Королько Людмила Василівна, Нікітін Юрій Васильович, Кожина Ольга Володимирівна, Макаренко Микола Іванович
Формула / Реферат
Способ регулирования параметров технологического оборудования машзала энергоблока атомной электростанции путем измерения регулируемого параметра, определения его скорости, контроля с помощью преобразователя достоверности показаний датчика регулируемого параметра и подачи преобразованного сигнала через эталонную модель на вход регулятора, формирующего управляющее воздействие на исполнительный орган, отличающийся тем, что после выдачи управляющего воздействия идентифицируют параметры эталонной модели, связывающей значение регулируемого параметра с положением исполнительного органа, рассчитывают изменение регулируемого параметра с использованием эталонной модели и идентифицированных ее параметров и в случае недостоверных показаний датчика регулируемого параметра при формировании управляющего воздействия используют рассчитанное значение, регулируемого параметра.
Текст
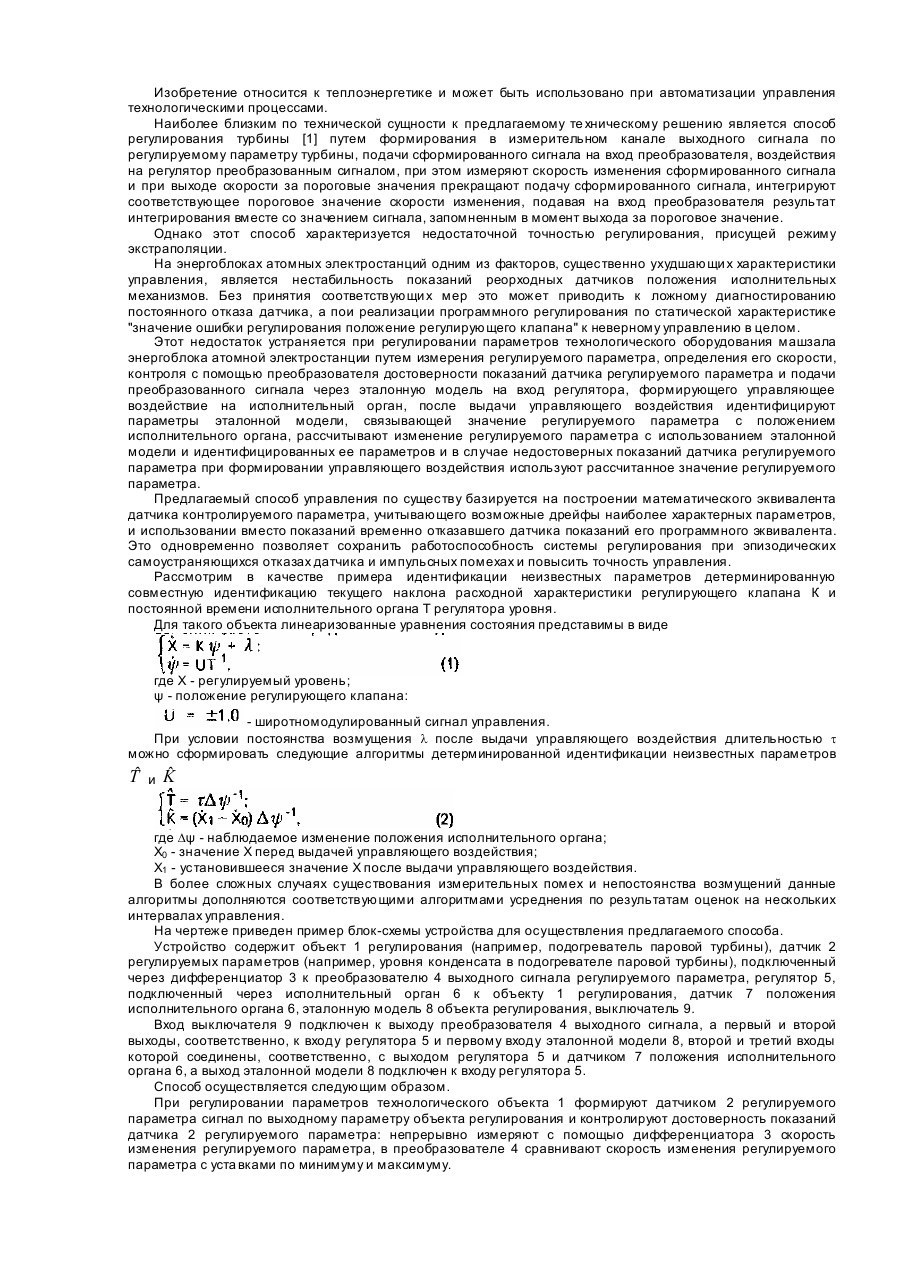
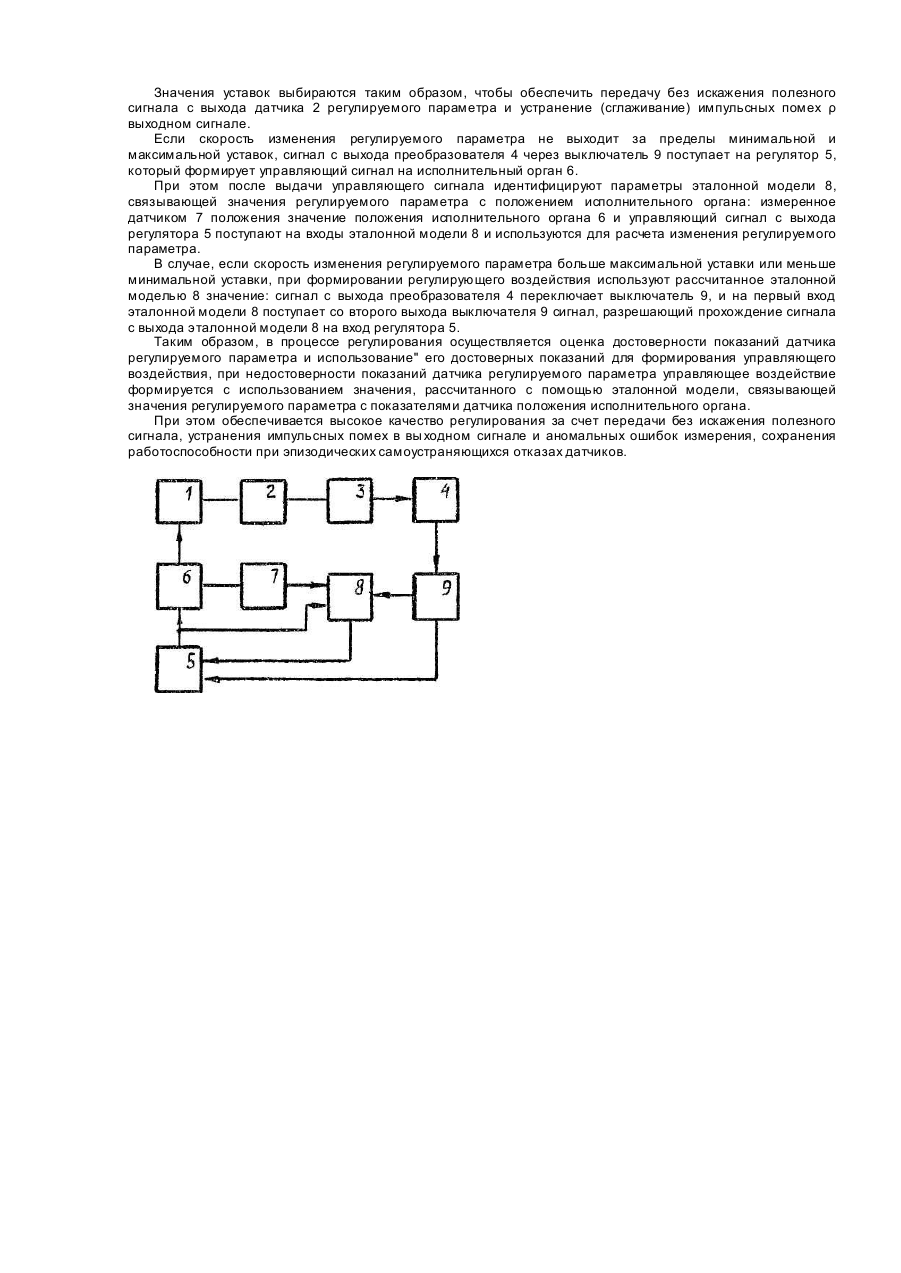
Изобретение относится к теплоэнергетике и может быть использовано при автоматизации управления технологическими процессами. Наиболее близким по технической сущности к предлагаемому те хническому решению является способ регулирования турбины [1] путем формирования в измерительном канале выходного сигнала по регулируемому параметру турбины, подачи сформированного сигнала на вход преобразователя, воздействия на регулятор преобразованным сигналом, при этом измеряют скорость изменения сформированного сигнала и при выходе скорости за пороговые значения прекращают подачу сформированного сигнала, интегрируют соответствующее пороговое значение скорости изменения, подавая на вход преобразователя результат интегрирования вместе со значением сигнала, запомненным в момент выхода за пороговое значение. Однако этот способ характеризуется недостаточной точностью регулирования, присущей режиму экстраполяции. На энергоблоках атомных электростанций одним из факторов, существенно ухудшающи х характеристики управления, является нестабильность показаний реорходных датчиков положения исполнительных механизмов. Без принятия соответствующи х мер это может приводить к ложному диагностированию постоянного отказа датчика, а пои реализации программного регулирования по статической характеристике "значение ошибки регулирования положение регулирующего клапана" к неверному управлению в целом. Этот недостаток устраняется при регулировании параметров технологического оборудования машзала энергоблока атомной электростанции путем измерения регулируемого параметра, определения его скорости, контроля с помощью преобразователя достоверности показаний датчика регулируемого параметра и подачи преобразованного сигнала через эталонную модель на вход регулятора, формирующего управляющее воздействие на исполнительный орган, после выдачи управляющего воздействия идентифицируют параметры эталонной модели, связывающей значение регулируемого параметра с положением исполнительного органа, рассчитывают изменение регулируемого параметра с использованием эталонной модели и идентифицированных ее параметров и в случае недостоверных показаний датчика регулируемого параметра при формировании управляющего воздействия используют рассчитанное значение регулируемого параметра. Предлагаемый способ управления по существу базируется на построении математического эквивалента датчика контролируемого параметра, учитывающего возможные дрейфы наиболее характерных параметров, и использовании вместо показаний временно отказавшего датчика показаний его программного эквивалента. Это одновременно позволяет сохранить работоспособность системы регулирования при эпизодических самоустраняющихся отказах датчика и импульсных помехах и повысить точность управления. Рассмотрим в качестве примера идентификации неизвестных параметров детерминированную совместную идентификацию текущего наклона расходной характеристики регулирующего клапана К и постоянной времени исполнительного органа Τ регулятора уровня. Для такого объекта линеаризованные уравнения состояния представимы в виде где X - регулируемый уровень; ψ - положение регулирующего клапана: - широтномодулированный сигнал управления. При условии постоянства возмущения l после выдачи управляющего воздействия длительностью t можно сформировать следующие алгоритмы детерминированной идентификации неизвестных параметров ˆ T и ˆ K где Dψ - наблюдаемое изменение положения исполнительного органа; Х0 - значение X перед выдачей управляющего воздействия; Χ1 - установившееся значение X после выдачи управляющего воздействия. В более сложных случаях существования измерительных помех и непостоянства возмущений данные алгоритмы дополняются соответствующими алгоритмами усреднения по результатам оценок на нескольких интервалах управления. На чертеже приведен пример блок-схемы устройства для осуществления предлагаемого способа. Устройство содержит объект 1 регулирования (например, подогреватель паровой турбины), датчик 2 регулируемых параметров (например, уровня конденсата в подогревателе паровой турбины), подключенный через дифференциатор 3 к преобразователю 4 выходного сигнала регулируемого параметра, регулятор 5, подключенный через исполнительный орган 6 к объекту 1 регулирования, датчик 7 положения исполнительного органа 6, эталонную модель 8 объекта регулирования, выключатель 9. Вход выключателя 9 подключен к выходу преобразователя 4 выходного сигнала, а первый и второй выходы, соответственно, к входу регулятора 5 и первому входу эталонной модели 8, второй и третий входы которой соединены, соответственно, с выходом регулятора 5 и датчиком 7 положения исполнительного органа 6, а выход эталонной модели 8 подключен к входу регулятора 5. Способ осуществляется следующим образом. При регулировании параметров технологического объекта 1 формируют датчиком 2 регулируемого параметра сигнал по выходному параметру объекта регулирования и контролируют достоверность показаний датчика 2 регулируемого параметра: непрерывно измеряют с помощыо дифференциатора 3 скорость изменения регулируемого параметра, в преобразователе 4 сравнивают скорость изменения регулируемого параметра с уста вками по минимуму и максимуму. Значения уставок выбираются таким образом, чтобы обеспечить передачу без искажения полезного сигнала с выхода датчика 2 регулируемого параметра и устранение (сглаживание) импульсных помех ρ выходном сигнале. Если скорость изменения регулируемого параметра не выходит за пределы минимальной и максимальной уставок, сигнал с выхода преобразователя 4 через выключатель 9 поступает на регулятор 5, который формирует управляющий сигнал на исполнительный орган 6. При этом после выдачи управляющего сигнала идентифицируют параметры эталонной модели 8, связывающей значения регулируемого параметра с положением исполнительного органа: измеренное датчиком 7 положения значение положения исполнительного органа 6 и управляющий сигнал с выхода регулятора 5 поступают на входы эталонной модели 8 и используются для расчета изменения регулируемого параметра. В случае, если скорость изменения регулируемого параметра больше максимальной уставки или меньше минимальной уставки, при формировании регулирующего воздействия используют рассчитанное эталонной моделью 8 значение: сигнал с выхода преобразователя 4 переключает выключатель 9, и на первый вход эталонной модели 8 поступает со второго выхода выключателя 9 сигнал, разрешающий прохождение сигнала с выхода эталонной модели 8 на вход регулятора 5. Таким образом, в процессе регулирования осуществляется оценка достоверности показаний датчика регулируемого параметра и использование" его достоверных показаний для формирования управляющего воздействия, при недостоверности показаний датчика регулируемого параметра управляющее воздействие формируется с использованием значения, рассчитанного с помощью эталонной модели, связывающей значения регулируемого параметра с показателями датчика положения исполнительного органа. При этом обеспечивается высокое качество регулирования за счет передачи без искажения полезного сигнала, устранения импульсных помех в вы ходном сигнале и аномальных ошибок измерения, сохранения работоспособности при эпизодических самоустраняющихся отказах датчиков.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for control of parameters of technological equipment of control room of nuclear power plant power unit
Автори англійськоюKorolko Liudmyla Vasylivna, Makarenko Mykola Ivanovych, Kozhyna Olha Volodymyrivna
Назва патенту російськоюСпособ регулировки параметров технологического оборудования мазала энергоблока атомной электростанции
Автори російськоюКоролько Людмила Васильевна, Макаренко Николай Иванович, Кожина Ольга Владимировна
МПК / Мітки
МПК: F01D 17/00
Мітки: атомної, спосіб, параметрів, машзалу, регулювання, електростанції, енергоблока, технологічного, устаткування
Код посилання
<a href="https://ua.patents.su/2-18695-sposib-regulyuvannya-parametriv-tekhnologichnogo-ustatkuvannya-mashzalu-energobloka-atomno-elektrostanci.html" target="_blank" rel="follow" title="База патентів України">Спосіб регулювання параметрів технологічного устаткування машзалу енергоблока атомної електростанції</a>
Спосіб регулювання живлення парогенератора атомної електростанції з водоводяним реактором

Номер патенту: 14275
Опубліковано: 25.04.1997
Автори: Полівенок Валерій Арсенович, Сімкін Борис Юхимович
МПК: G21D 3/08
Мітки: атомної, живлення, реактором, електростанції, спосіб, парогенератора, водоводяним, регулювання
Спосіб визначення похибок датчиків систем автоматичного регулювання параметрів технологічних процесів та пристрій для його здійснення
Номер патенту: 18197
Опубліковано: 01.07.1997
Автори: Дубровний Віктор Опанасович, Шевченко Костянтин Леонідович, Скрипник Юрій Олексійович
МПК: G05B 23/00
Мітки: пристрій, регулювання, технологічних, процесів, параметрів, автоматичного, датчиків, здійснення, визначення, систем, похибок, спосіб
Формула / Реферат:
1. Способ определения погрешностей датчиков систем автоматического регулирования параметров технологических процессов, заключающийся в том, что задатчиком устанавливают требуемое значение параметра технологического процесса, изменяют выходной сигнал датчика несколько раз, меняя соответствующим образом измеряемый параметр технологического процесса и вычисляют погрешности датчика по значениям калиброванных воздействий на выходной сигнал...
Спосіб регулювання парової турбіни
Номер патенту: 18693
Опубліковано: 25.12.1997
Автори: Козлов Микола Юрійович, Рохленко Всеволод Юрійович, Королько Людмила Василівна, Нікітін Юрій Васильович
МПК: F01D 17/00
Мітки: парової, регулювання, турбіни, спосіб
Формула / Реферат:
Способ регулирования паровой турбины путем формирования управляющего сигнала и подачи его на отсечной золотник сервомотора регулирующих клапанов турбины, отличающийся тем, что значения постоянных времен отсечного золотника и сервомотора и среднеквадратичные значения нерегулируемых колебаний отсечного золотника и сервомотора, сравнивают их соответственно с пороговыми значениями постоянных времен и допустимыми среднеквадратичными значениями...
Система автоматичного регулювання потужності енергоблока
Номер патенту: 2561
Опубліковано: 26.12.1994
Автори: Цирульник Федір Петрович, Білоус Павло Федорович, АЛТИН СТАНІСЛАВ ВАСИЛЬОВИЧ, Давидов Микола Євгенійович
МПК: F01K 13/00, F01K 7/00
Мітки: регулювання, автоматичного, система, енергоблока, потужності
Формула / Реферат:
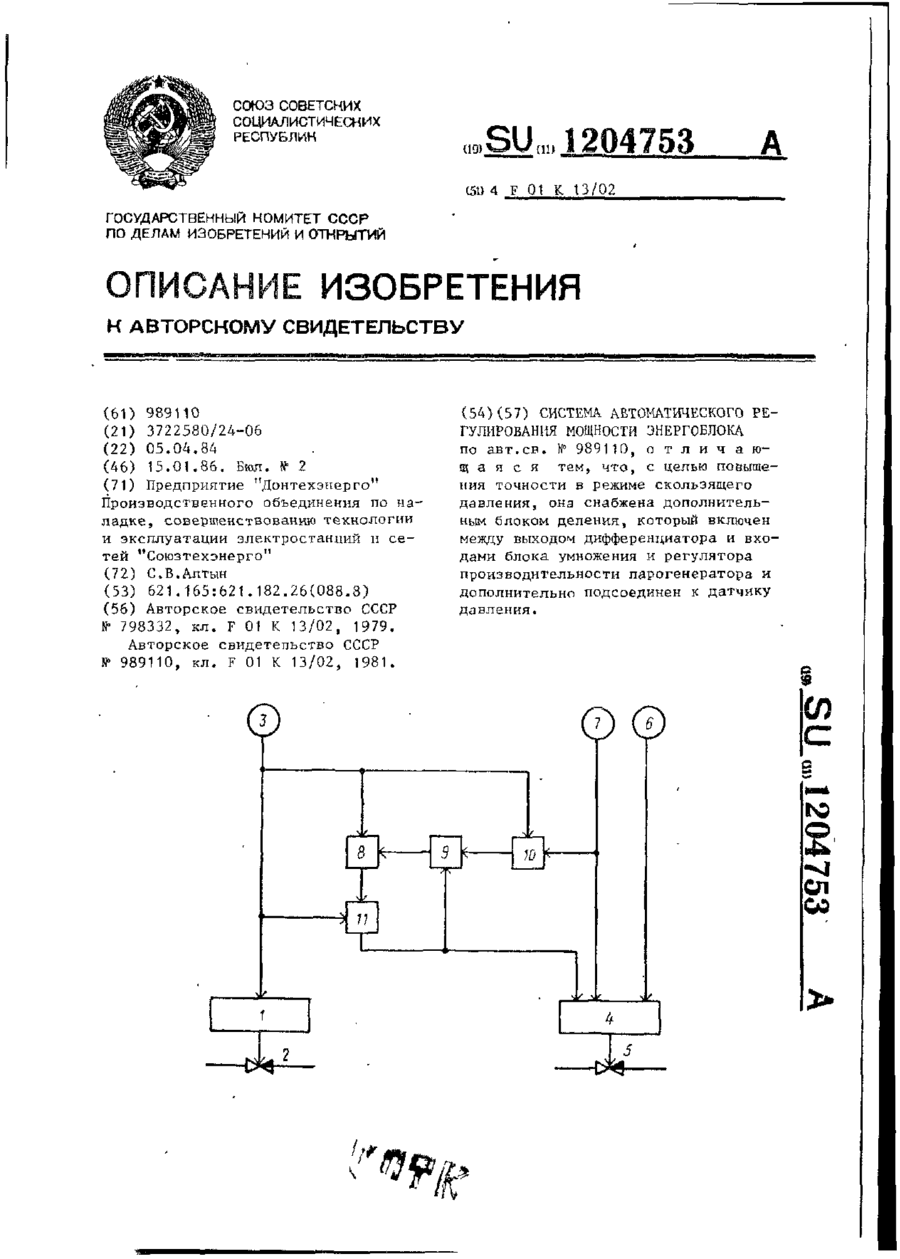
Система автоматического регулирования мощности энергоблока по авт. св. № 434178, отличающаяся тем, что, с целью повышения качества регулирования мощности в широком диапазоне нагрузок энергоблока, в систему дополнительно введен блок умножения, один вход которого соединен с выходом дифференциатора, второй вход — с задатчиком мощности, а выход — со входом дифференциатора.
Система автоматичного регулювання потужності енергоблока
Номер патенту: 2562
Опубліковано: 26.12.1994
Автор: АЛТИН СТАНІСЛАВ ВАСИЛЬОВИЧ
МПК: F01K 13/00
Мітки: система, потужності, регулювання, енергоблока, автоматичного
Формула / Реферат:
Система автоматического регулирования мощности энергоблока по авт. св. № 989110, отличающаяся тем, что, с целью повышения точности в режиме скользящего давления, она снабжена дополнительным блоком деления, который включен между выходом дифференциатора и входами блока умножения и регулятора производительности парогенератора и дополнительно подсоединен к датчику давления.
Попередній патент: Спосіб управління рівнем рідини у резервуарі конденсатно-живильного тракту парової турбоустановки
Наступний патент: Спосіб регулювання рівня рідини у конденсаторі парової турбіни
Випадковий патент: Спосіб визначення оптичних параметрів поверхні твердих тіл