Спосіб регулювання рівня рідини у конденсаторі парової турбіни
Номер патенту: 18696
Опубліковано: 25.12.1997
Автори: Нікітін Юрій Васильович, Сіренко Геннадій Іванович, Королько Людмила Василівна, Макаренко Микола Іванович


Формула / Реферат
Способ регулирования уровня жидкости в конденсаторе паровой турбины путем измерения отклонения текущего значения уровня от заданного, его скорости и изменения модуля отклонения и при увеличении модуля отклонения регулируют уровень изменением положения исполнительного органа по управляющему воздействию от регулятора, учитывающего величину и скорость отклонения, отличающийся тем, что после выдачи каждого управляющего воздействия идентифицируют значения постоянной времени и выбега исполнительного органа, сравнивают эти значения с заданными пороговыми значениями и при выходе значений постоянной времени и выбега за пределы, заданные пороговыми значениями, выдачу управляющего сигнала не производят, при не выходе данных значений за указанные пределы перед выдачей управляющего воздействия сравнивают идентифицированное значение выбега со значением требуемого приращения положения исполнительного органа на следующем шаге управления, при превышении значением выбега значения требуемого приращения положения исполнительного органа выдачу управляющего воздействия не производят, в противном случае формируют очередной управляющий сигнал, длительность которого выбирают равной отношению разности требуемого приращения положения исполнительного органа и идентифицированного значения выбега к идентифицированному значению постоянной времени исполнительного органа.
Текст
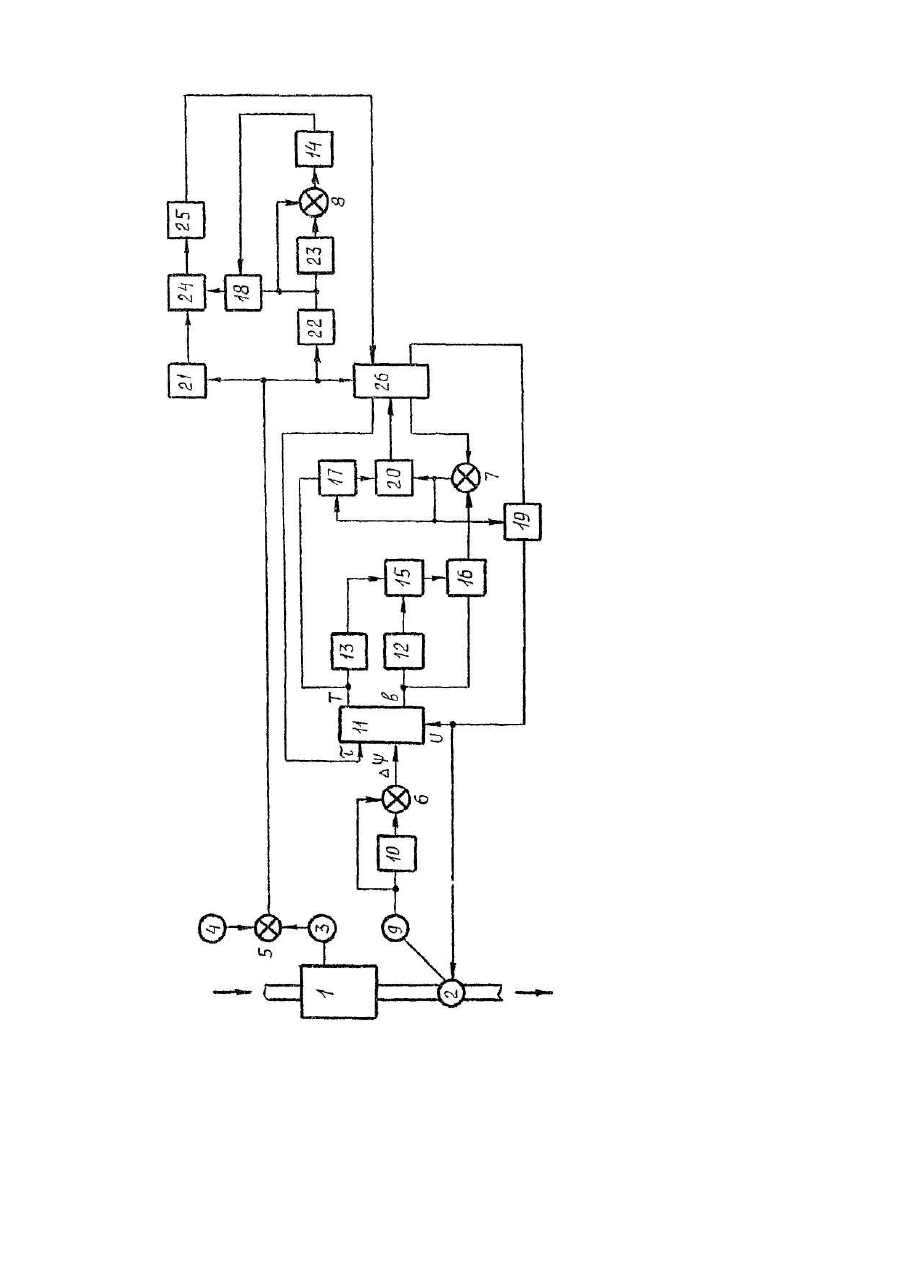
Изобретение относится к теплоэнергетике и может быть использовано при автоматизации регулирования уровня жидкости в конденсаторе паровой турбины и других резервуарах. Известен способ регулирования уровня жидкости в резервуаре, при котором измеряют отклонение текущего уровня от заданного, скорость и направление изменения этого отклонения и регулируют уровень с учетом направления изменения отклонения [1]. Недостатком этого способа является недостаточная точность регулирования, так как не учитывается наличие имеющихся практически у всех исполнительных органов медленно меняющихся выбегов и медленно меняющейся постоянной времени. Наиболее близким по технической сущности и достигаемому результату является способ регулирования уровня жидкости в резервуаре посредством исполнительного механизма, при котором измеряют отклонение текущего уровня от заданного, знак и скорость отклонения, направление изменения модуля отклонения, задают верхнюю и нижнюю границы зоны нечувствительности регулирования и при отклонении за зону нечувствительности регулирования и увеличении модуля отклонения регулируют уровень путем изменения положения исполнительного механизма подачей на него регулирующих импульсов с учетом величины отклонения, его знака и скорости [2]. Однако этот способ характеризуется недостаточной точностью вследствие того, что при регулировании не учитывается влияние медленных изменений выбега и разгонной характеристики исполнительного механизма. Повышение точности регулирования при регулировании уровня жидкости в конденсаторе паровой турбины путем измерения отклонения текущего значения уровня от заданного, его скорости и изменения модуля отклонения и при увеличении модуля отклонения изменением положения исполнительного органа по управляющему воздействию от регулятора, учитывающего величину и скорость отклонения, достигается тем, что после выдачи каждого управляющего воздействия идентифицируют значения постоянной времени и выбега исполнительного органа, сравнивают эти значения с заданными пороговыми значениями и при выходе значений постоянной времени и выбега за пределы, заданные пороговыми значениями, выдачу управляющего воздействия не производят, при невыходе данных значений за указанные пределы перед выдачей управляющего воздействия сравнивают идентифицированное значение выбега со значением требуемого приращения положения исполнительного органа на следующем шаге управления, при превышении значением выбега значения требуемого приращения положения исполнительного органа выдачу управляющего воздействия не производят, в противном случае формируют очередной управляющий сигнал, длительность которого выбирают равной отношению разности требуемого приращения положения исполнительного органа и идентифицированного значения выбега к идентифицированному значению постоянной времени исполнительного органа. Предлагаемый способ позволяет системе регулирования адаптироваться к медленным изменениям выбега и разгонной характеристики исполнительного органа (его постоянной времени). Своевременная оценка постоянной времени и выбега исполнительного органа позволяют более точно формировать законы регулирования и блокировать выдачу управляющих воздействий при выходе данных значений за технологически допустимые пределы. На чертеже приведен пример блок-схемы устройства для осуществления предлагаемого способа. Устройство для регулирования уровня жидкости в конденсаторе 1 паровой турбины посредством исполнительного органа 2 содержит датчик 3 текущего уровня, задатчик 4 уровня, первый, второй, третий, четвертый 5, 6, 7, 8 элементы сравнения, датчик 9 положения исполнительного органа, элемент 10 памяти, вычислительное устройство 11, первый, второй, третий пороговые элементы 12, 13, 14, элемент 15 И, первый, второй, третий, четвертый ключевые элементы 16, 17, 18, 19, формирователь 20 длительности импульсов, дифференциатор 21, формирователь 22 модуля входного сигнала, элемент 23 задержки, делитель 24, инвертор 25, регулятор 26. Первый и второй входы элемента 5 сравнения подключены соответственно к выходу датчика 3 текущего уровня и задатчику 4 уровня, а выход- к входу дифференциатора 21, выход которого соединен с первым входом делителя 24, входу формирователя 22 модуля входного сигнала и первому входу регулятора 26. Выход формирователя 22 модуля входного сигнала связан с первым входом четвертого элемента 8 сравнения, через элемент 23 задержки со вторым входом четвертого элемента 8 сравнения, выход которого подключен через третий пороговый элемент 14 к управляющему входу третьего ключевого элемента 18, и через третий ключевой элемент 18 - со вторым входом делителя 24, выход которого через инвертор 25 подключен ко второму входу регулятора 26, управляющий выход которого через четвертый ключевой элемент 19 связан с исполнительным органом 2 и третьим входом вычислительного устройства 11. К исполнительному органу 2 подключен датчик 9 положения, выход которого связан с первым входом второго элемента 6 сравнения и через элемент 10 памяти со вторым входом элемента 6 сравнения, выход которого подключен к первому входу вычислительного устройства 11, второй вход которого связан с первым информационным выходом регулятора 26, а первый выход через первый ключевой элемент 16 с первым входом третьего элемента 7 сравнения и через первый пороговый элемент 12 с первым входом элемента 15 И. Второй выход вычислительного устройства 11 через второй ключевой элемент 17 подключен к первому входу формирователя 20 длительности импульсов и через второй пороговый элемент 13 ко второму входу элемента 15 И, выход которого соединен с управляющим входом первого ключевого элемента 16. Второй информационный выход регулятора 26 подключен ко второму входу третьего элемента 7 сравнения, выход которого соединен с управляющими входами второго 17 и четвертого 19 ключевых элементов и вторым входом формирователя 20 длительности импульсов, выход которого подключен к третьему входу регулятора 26. Устройство осуществляет способ регулирования уровня жидкости в конденсаторе паровой турбины следующим образом Датчиком 3 уровня измеряют текущий уровень конденсата, определяют отклонение текущего уровня от заданного задатчиком 4 уровня с помощью первого элемента 5 сравнения, с выхода которого на первый вход регулятора 26 поступает сигнал, используемый регулятором при формировании очередного управляющего сигнала. Определяют скорость отклонения с помощью дифференциатора 21. Изменение модуля отклонения определяется следующим образом: формирователь 22 модуля входного сигнала преобразует поступающий на его вход сигнал по отклонению в сигнал по модулю отклонения, который затем сравнивается в четвертом элементе 8 сравнения с сигналом по модулю отклонения, который задерживается элементом 23 задержки на заданное время (длительность задержки выбирают минимально возможной при условии превышения разностью между текущим и задержанным сигналами по модулю отклонения величины погрешности датчика уровня), и при превышении сигналом по текущему модулю отклонения задержанного сигнала третий пороговый элемент 14 формирует на выходе постоянный сигнал, соответствующий увеличению модуля отклонения, который, поступая на управляющий вход третьего ключевого элемента 18, разрешает формирование делителем 24 корректирующего сигнала, который через инвертор 25 поступает на второй вход регулятора 26. Так как исполнительные органы представляют собой механизмы с нерегулируемой постоянной скоростью положения и практически все имеют медленно меняющиеся выбеги и постоянные времени, упрощенное уравнение, определяющее положение исполнительного органа на каждом шаге управления, может быть представлено в виде где і - индекс шага управления; ψ - положение исполнительного органа; U - управляющий сигнал (0,±1); t - длительность управляющего сигнала; b - выбег исполнительного органа; Τ - постоянная времени исполнительного органа. Уравнение содержит линейную комбинацию из двух неизвестных квазипостоянных величин. В наиболее простом случае отсутствия измерительных помех и случайных перемещений клапана, связанных с вибрацией, для определения этих неизвестных величин достаточно проведения двух измерений Алгоритм вычисления постоянной времени Τ и выбега b в этом случае может быть представлен в виде: ˆ ˆ -1 необходимо В более общем стохастическом случае для получения достоверных оценок b и T сглаживание по результатам нескольких измерений величины Δy j и соответствующи х расчетов величин bj и Tj-1. ˆ ˆ -1 могут быть представлены в виде Алгоритмы формирования сглаженных оценок b и T где вследствие квазистационарности величин b и Τ можно полагать Κ1≤1 и K2≤1. Конкретизация коэффициентов усиления Κ1 и К2 должна основываться на реальных количественных характеристиках действующи х измерительных помех и случайных возмущений. Длительность управляющих импульсов t процессе функционирования регулятора постоянно варьируется, а величина выбега в течение длительного времени может считаться постоянной. Вследствие этого имеется принципиальная возможность оценки величины выбега b и постоянной времени Τ по известным значениям величины y и t. После выдачи регулятором 26 каждого управляющего воздействия измеряют положение исполнительного органа 2 с помощью датчика 9, сравнивают его во втором элементе 6 сравнения с предыдущим значением положения исполнительного органа, запомненным элементом 10 памяти (значения, запоминаемые элементом 10 памяти, обновляются после выдачи очередного управляющего воздействия). Значение приращения положения Δψ i = ψ i – ψ i-1 исполнительного органа 2 с выхода второго элемента 6 сравнения поступает на первый вход вычислительного устройства 11, на второй вход которого поступает сигнал, соответствующий длительности управляющего сигнала, с первого информационного выхода регулятора 26. Вычислительное устройство 11 осуществляет идентификацию значений постоянной времени Τ и выбега исполнительного органа b, используя для определения измеренные значения приращения положения исполнительного органа и длительность предыдущего управляющего импульса. Идентифицированные значения выбега b и постоянной времени Τ поступают с первого и второго соответственно выходов вычислительного устройства 11 на первый и второй пороговые элементы 12 и 13 и сравниваются с заданными пороговыми значениями. Только в случае невыхода за заданные пределы значений постоянной времени и выбега сигналы с выходов первого 12 и второго 13 пороговых элементов поступают на первый и второй входы элемента И 15, сигнал с выхода элемента И 15 поступает на управляющий вход первого ключевого элемента 1 б, замыкает его и разрешает прохождение сигнала (соответствующего выбегу) с первого выхода вычислительного устройства на первый вход третьего элемента 7 сравнения. В третьем элементе 7 сравнения происходит сравнение идентифицированного значения выбега с прогнозируемым регулятором 26 значением приращения положения исполнительного органа, поступающим на второй вход элемента 7 сравнения со второго информационного выхода регулятора 26. Если идентифицированное значение выбега не превышает значения требуемого регулятором 26 приращения положения исполнительного органа 2, сигнал, равный разности требуемого приращения положения и выбега, с выхода третьего элемента 7 сравнения поступает на управляющий вход четвертого ключевого элемента 19 и замыкает цепь прохождения управляющего сигнала с управляющего выхода регулятора 26 на исполнительный орган 2. При этом сигнал с выхода третьего элемента 7 сравнения поступает на второй вход формирователя 20 длительности импульса и на управляющий вход второго ключевого элемента 17, вызывая прохождение сигнала (соответствующего идентифицированному значению постоянной времени) со второго выхода вычислительного устройства 11 на первый вход формирователя 20 длительности импульса, который формирует длительность очередного управляющего импульса равной отношению разности требуемого приращения положения исполнительного органа и идентифицированного значения выбега к идентифицированному значению постоянной времени исполнительного органа 2. В противном случае, если идентифицированное значение выбега превышает значение требуемого регулятором 26 приращения положения исполнительного органа 2, сигнал с выхода третьего элемента 7 сравнения не поступает на управляющие входы второго 17 и четвертого 19 ключевых элементов, цепь прохождения управляющего сигнала не замыкается и выдачу управляющего сигнала не производят. Таким образом, в процессе регулирования уровня жидкости в конденсаторе паровой турбины идентифицируются постоянная времени и выбег исполнительного органа, своевременная оценка которых позволяет более точно формировать законы регулирования и блокировать выдачу управляющих сигналов при выходе идентифицированных значений за технологически допустимые пределы.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for control of liquid level in condenser of steam turbine
Автори англійськоюKorolko Liudmyla Vasylivna, Makarenko Mykola Ivanovych, Sirenko Genadii Ivanovych
Назва патенту російськоюСпособ регулировки уровня жидкости в конденсаторе паровой турбины
Автори російськоюКоролько Людмила Васильевна, Макаренко Николай Иванович, Сиренко Геннадий Иванович
МПК / Мітки
МПК: F22D 5/00
Мітки: регулювання, конденсаторі, парової, рідини, спосіб, рівня, турбіни
Код посилання
<a href="https://ua.patents.su/4-18696-sposib-regulyuvannya-rivnya-ridini-u-kondensatori-parovo-turbini.html" target="_blank" rel="follow" title="База патентів України">Спосіб регулювання рівня рідини у конденсаторі парової турбіни</a>
Спосіб регулювання парової турбіни
Номер патенту: 18693
Опубліковано: 25.12.1997
Автори: Нікітін Юрій Васильович, Козлов Микола Юрійович, Рохленко Всеволод Юрійович, Королько Людмила Василівна
МПК: F01D 17/00
Мітки: регулювання, спосіб, турбіни, парової
Формула / Реферат:
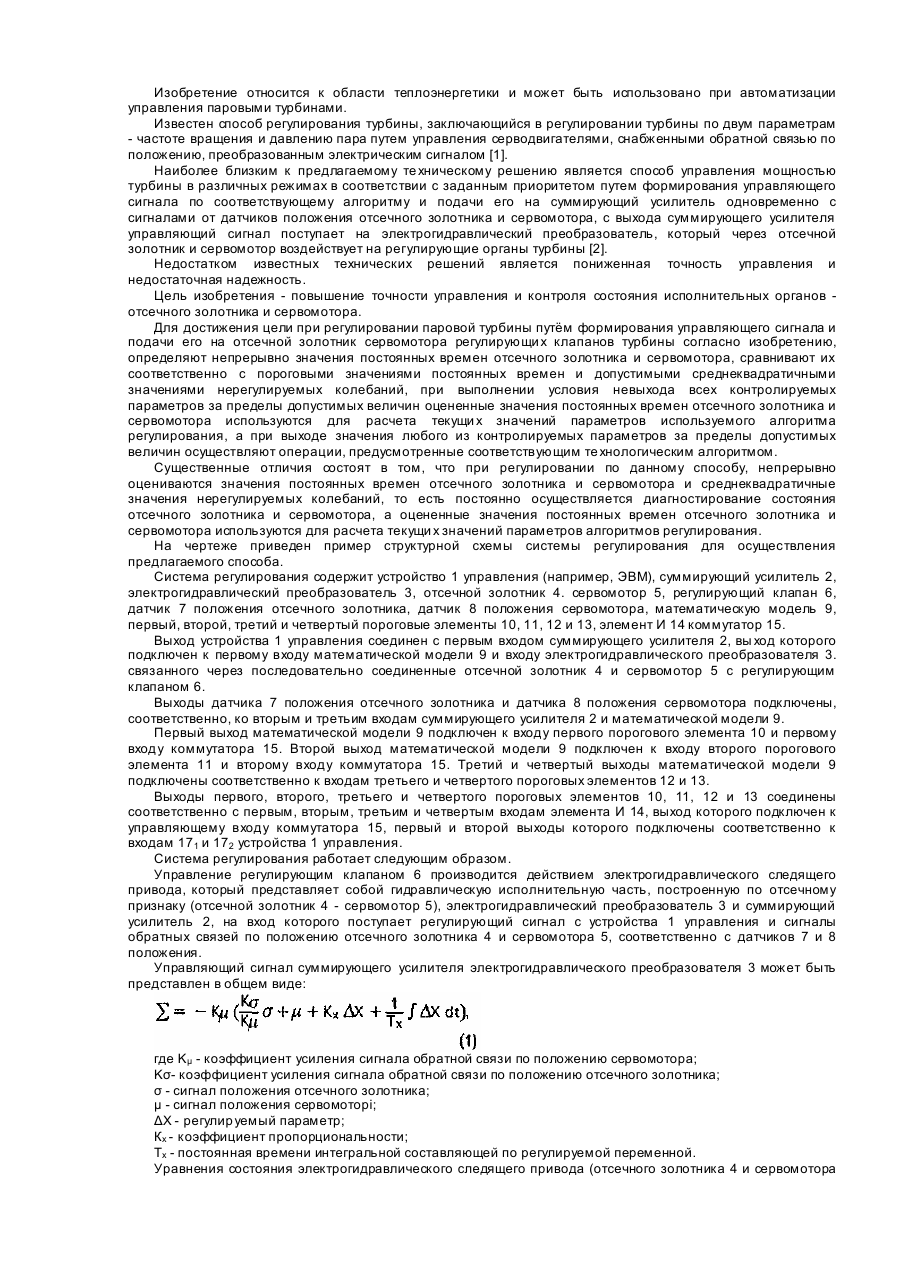
Способ регулирования паровой турбины путем формирования управляющего сигнала и подачи его на отсечной золотник сервомотора регулирующих клапанов турбины, отличающийся тем, что значения постоянных времен отсечного золотника и сервомотора и среднеквадратичные значения нерегулируемых колебаний отсечного золотника и сервомотора, сравнивают их соответственно с пороговыми значениями постоянных времен и допустимыми среднеквадратичными значениями...
Спосіб регулювання рівня в регенеративному підогрівателі парової турбини
Номер патенту: 11829
Опубліковано: 25.12.1996
Автори: Кожина Ольга Володимирівна, Гущина Валентина Миколаївна, Макаренко Микола Іванович
МПК: F22D 5/00
Мітки: регулювання, спосіб, рівня, регенеративному, парової, турбіни, підогрівателі
Формула / Реферат:
Способ регулирования уровня в регенеративном подогревателе паровой турбины по авт.св. № 717489, отличающийся тем, что, с целью улучшения качества регулирования уровня, измеряют положение регулирующих клапанов турбины и формирование сигнала по тепловой нагрузке подогревателя ведут по положению этих клапанов.
Спосіб управління рівнем рідини у резервуарі конденсатно-живильного тракту парової турбоустановки
Номер патенту: 18694
Опубліковано: 25.12.1997
Автори: Королько Людмила Василівна, Макаренко Микола Іванович, Нікітін Юрій Васильович, Сіренко Геннадій Іванович
МПК: F22D 5/00
Мітки: турбоустановки, конденсатно-живильного, парової, рідини, резервуарі, управління, тракту, рівнем, спосіб
Формула / Реферат:
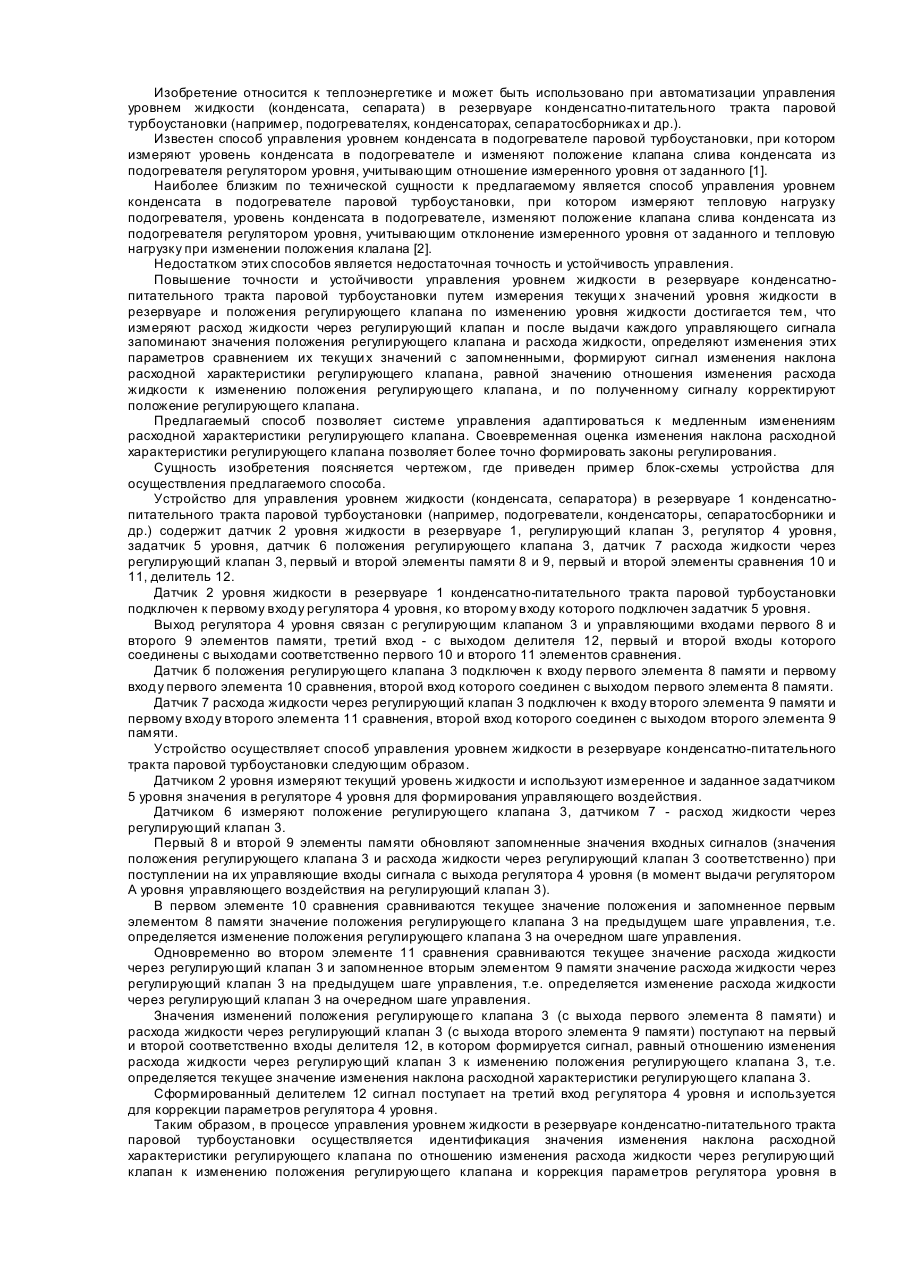
Способ управления уровнем жидкости в резервуаре конденсатно-питательного тракта паровой турбоустановки путем измерения текущих значений уровня жидкости в резервуаре и положения регулирующего клапана и изменения положения регулирующего клапана по изменению уровня жидкости, отличающийся тем, что измеряют расход жидкости через регулирующий клапан и после выдачи каждого управляющего сигнала запоминают значения положения регулирующего клапана и...
Пристрій для регулювання рівня рідини у резервуарі
Номер патенту: 11831
Опубліковано: 25.12.1996
Автори: Нікітін Юрій Васильович, Нестеров Лев Володимирович, Мирний Валерій Анатолійович, Клочко Віталій Олексійович
МПК: G05D 9/00
Мітки: рідини, резервуарі, рівня, пристрій, регулювання
Формула / Реферат:
Устройство для регулирования уровня жидкости в резервуаре, содержащее последовательно соединенные датчик уровня жидкости, первый элемент сравнения, регулятор, блок суммирования, первый ключевой элемент и исполнительный механизм с люфтом, последовательно соединенные формирователь модуля, элемент задержки, второй элемент сравнения, второй пороговый элемент и первый элемент И, выход которого подключен к управляющему входу первого ключевого...
Спосіб регулювання рівня конденсата у підогрівателі
Номер патенту: 11828
Опубліковано: 25.12.1996
Автори: Клочко Віталій Олексійович, Нестеров Лів Володимирович, Мирний Валерій Анатолійович, Нікітін Юрій Васильович, Гриценко Володимир Миколайович
МПК: F28F 27/00
Мітки: рівня, спосіб, конденсата, підогрівателі, регулювання
Формула / Реферат:
Способ регулирования уровня конденсата в подогревателе паровой турбоустановки путем измерения тепловой нагрузки, например, измерением давления пара в отборе турбины, измерения уровня конденсата и положения клапана слива конденсата из подогревателя, определения скоростей изменения тепловой нагрузки п уровня и сравнения этих скоростей с заданными пороговыми значениями и формирования сигнала на изменение положения клапана слива с учетом...
Попередній патент: Спосіб регулювання параметрів технологічного устаткування машзалу енергоблока атомної електростанції
Наступний патент: Спосіб зміцнення різального інструменту
Випадковий патент: Спосіб отримання рідкого біопалива з ріпакової олії