Привід рукавичного автомата
Номер патенту: 20742
Опубліковано: 07.10.1997
Автори: Хомяк Олег Миколайович, Федоров Юрій Дмитрович, Радайда Джехад Салех, Піпа Борис Федорович
Формула / Реферат
Привод перчаточного автомата, содержащий электродвигатель с установленным на валу ведущим шкивом клиноременной передачи, соединенной с редуктором, кинематически связанным с приводным валом, отличающийся тем, что дополнительно снабжен мотор-редуктором и последовательно установленными обгонной и предохранительной муфтами, при этом мотор-редуктор посредством обгонной и предохранительной муфт соединен с электродвигателем.
Текст
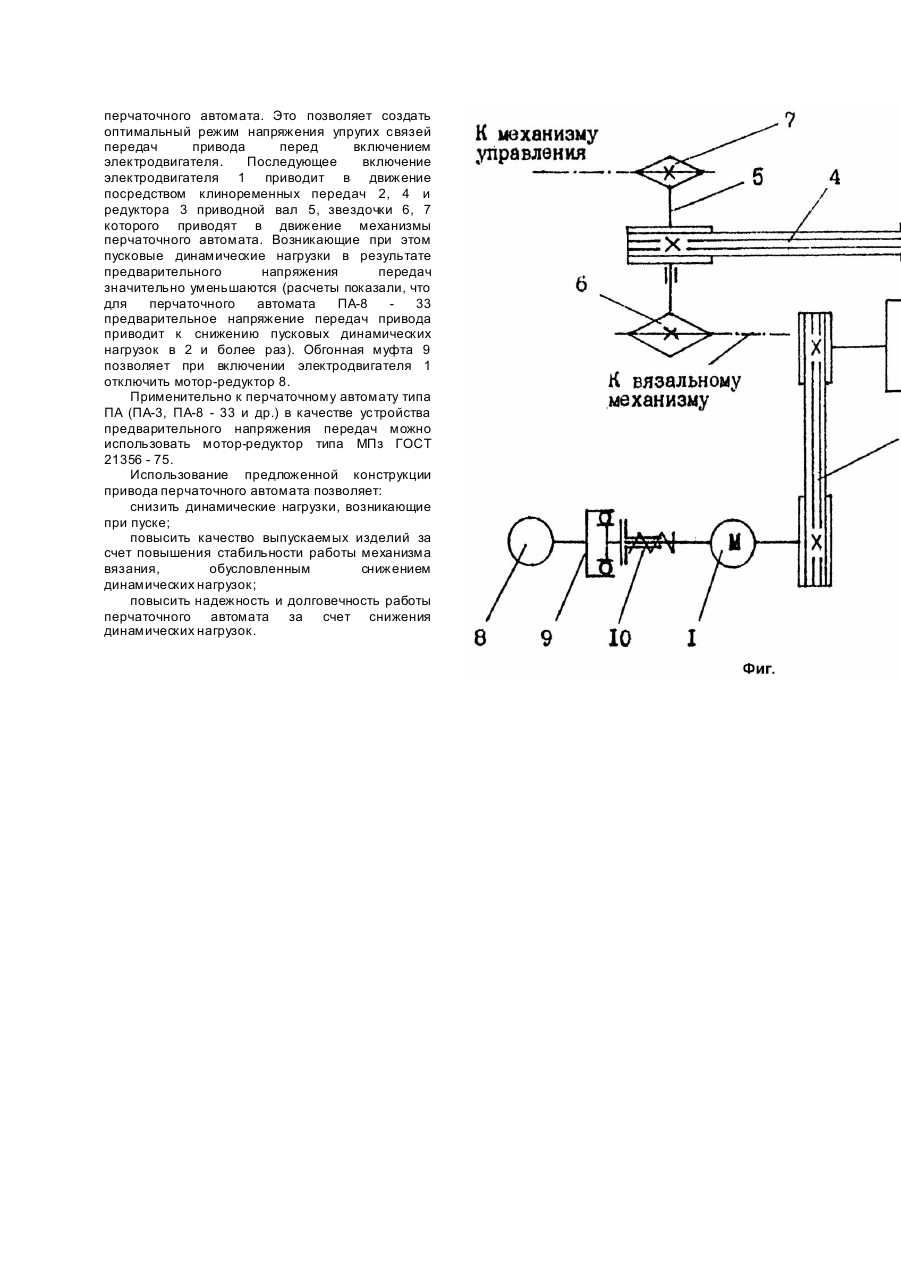
Изобретение относится к области трикотажного машиностроения, в частности к перчаточным автоматам. Известен привод перчаточного автомата, содержащий электродвигатель с установленным на валу ведущим шкивом клиноременной передачи, соединенной с редуктором, кинематически связанным с приводным валом (Присяжнюк П.А. Наладка и эксплуатация плосковязальных трикотажных машин. - К.: Техніка, 1983. - Рис.56, с.109). Спецификой работы перчаточного автомата являются значительные динамические. нагрузки, возникающие в приводе в период его пуска. При этом динамические нагрузки в 4 и более раз превышают статические (Хомяк О.Н., Пипа Б.Ф. Повышение эффективности работы вязальных машин. - М.: Легпромбытиздат, 1990. - 208с.). Динамические нагрузки являются одной из основных причин снижение надежности и долговечности работы перчаточного автомата и качества выпускаемой продукции. С целью устранения указанных недостатков стали применять привод перчаточного автомата, в котором включение электродвигателя осуществляется ступенчато. Вначале электродвигатель включается на малую скорость, затем на большую. Известен, в частности, привод перчаточного автомата, содержащий электродвигатель с установленным на валу ведущим шкивом клиноременной передачи, соединенной с редуктором, кинематически связанным с приводным валом, электродвигатель которого включается ступенчато (Автомат перчаточный. Техническое описание и инструкция по эксплуатации. - Черновцы, 1987. - С.19, 20; рис.2, с.40). Однако такое решение для снижения динамических нагрузок в приводе является неэффективным и не может снизить пусковые динамические нагрузки, так как пусковой момент электродвигателя (серия 4АХ80 А 4/2к УЗ) при включении его на малую скорость - пусковой момент электродвигателя при включении его на малую скорость; коэффициент, учитывающий отношение пускового момента к номинальному моменту электродвигателя; - номинальная мощность электродвигателя при работе его на малой скорости; - угло вая скорость ротора электродвигателя при работе на малой скорости) больше пускового момента электродвигателя в режиме быстрой скорости соответствующие параметры электродвигателя при работе его на быстрой скорости). В рассматриваемом техническом решении пуск перчаточного автомата как на малой, так и большой скорости осуществляется без предварительного напряжения упруги х связей передач. Отсутствие в приводе перчаточного автомата устройства, создающего предварительное напряжение связей также на позволяет снизить динамические нагрузки, возникающие о приводе при пуске перчаточного автомата (Кожевников С.Н. Динамика машин с упругими звеньями. - К.: Изд-во АН УССР, 1961. 190с.). Таким образом, в основу изобретения положена задача создать такую конструкцию привода перчаточного автомата, в котором введение дополнительных узлов и и х связь с электродвигателем, позволило бы снизить динамические нагрузки, возникающие в приводе перчаточного автомата в период пуска. Поставленная задача решена тем, что привод, содержащий электродвигатель с установленным на валу ведущим шкивом клиноременной передачи, соединенной с редуктором, кинематически связанным с приводным валом, дополнительно снабжен мотор-редуктором и последовательно установленными обгонной и предохранительной муфтами, при этом моторредуктор посредством обгонной и предохранительной муфт соединен с электродвигателем. Введение в привод перчаточного автомата мотор-редуктора, соединенного с электродвигателем посредством обгонной и предохранительной муфт, создает в упругих связях передач привода предварительное напряжение (перед включением электродвигателя), величина которого может быть выбрана оптимальной посредством предохранительной муфты. Предварительное напряжение упругих связей передач привода способствует созданию благоприятных условий последующему пуску перчаточного автомата при включении электродвигателя (выбор зазоров в передачах и др.), что позволяет снизить динамические нагрузки, возникающие при пуске перчаточного автомата, что способствует повышению надежности и долговечности его работы и качества выпускаемых изделий. Примеров использования мотор-редукторов для создания предварительного напряжения упругих связей передач привода машин и автоматов авторам из технической литературы не известно. На чертеже (фиг.) представлена кинематическая схема привода перчаточного автомата. Привод перчаточного автомата содержит электродвигатель 1, на валу которого установлен ведущий шкив клиноременной передачи 2, соединяющей его с редуктором 3. На выходном валу редуктора 3 закреплен ведущий шкив клиноременной передачи 4, кинематически связывающей редуктор 3 с приводным валом 5, на концах которого жестко закреплены звездочки 6 и 7 цепных передач механизмов перчаточного автомата (на чертеже не показано). Привод также содержит устройство предварительного напряжения передач, выполненное в виде моторредуктора 8, соединенное с электродвигателем 1 посредством обгонной 9 и предохранительной 10 муфт. Принцип работы привода состоит в следующем. Перед пуском перчаточного автомата включается мотор-редуктор 8. Создаваемый им крутящий момент посредством обгонной муфты 9 и предохранительной муфты 10 через электродвигатель сообщается передачам привода. Предельный момент, передаваемый предохранительной муфтой, выбирается несколько меньше (на 5 ... 10%), чем статический момент сил солротивления механизмов перчаточного автомата. Это позволяет создать оптимальный режим напряжения упругих связей передач привода перед включением электродвигателя. Последующее включение электродвигателя 1 приводит в движение посредством клиноременных передач 2, 4 и редуктора 3 приводной вал 5, звездочки 6, 7 которого приводят в движение механизмы перчаточного автомата. Возникающие при этом пусковые динамические нагрузки в результате предварительного напряжения передач значительно уменьшаются (расчеты показали, что для перчаточного автомата ПА-8 33 предварительное напряжение передач привода приводит к снижению пусковых динамических нагрузок в 2 и более раз). Обгонная муфта 9 позволяет при включении электродвигателя 1 отключить мотор-редуктор 8. Применительно к перчаточному автомату типа ПА (ПА-3, ПА-8 - 33 и др.) в качестве устройства предварительного напряжения передач можно использовать мотор-редуктор типа МПз ГОСТ 21356 - 75. Использование предложенной конструкции привода перчаточного автомата позволяет: снизить динамические нагрузки, возникающие при пуске; повысить качество выпускаемых изделий за счет повышения стабильности работы механизма вязания, обусловленным снижением динамических нагрузок; повысить надежность и долговечность работы перчаточного автомата за счет снижения динамических нагрузок.
ДивитисяДодаткова інформація
Автори англійськоюKhomiak Oleh Mykolaiovych, Fedorov Yurii Dmytrovych, Pipa Borys Fedorovych
Автори російськоюХомяк Олег Николаевич, Федоров Юрий Дмитриевич, Пипа Борис Федорович
МПК / Мітки
МПК: D04B 15/96, D04B 15/16
Мітки: рукавичного, автомата, привід
Код посилання
<a href="https://ua.patents.su/2-20742-privid-rukavichnogo-avtomata.html" target="_blank" rel="follow" title="База патентів України">Привід рукавичного автомата</a>
Привід рукавичного автомата
Номер патенту: 20741
Опубліковано: 07.10.1997
Автори: Федоров Юрій Дмитрович, Хомяк Олег Миколайович, Радайда Джехад Салех, Піпа Борис Федорович
МПК: D04B 15/16, D04B 15/96
Мітки: автомата, привід, рукавичного
Формула / Реферат:
1. Привод перчаточного автомата, содержащий электродвигатель, соединенный посредством клиноременной передачи с редуктором, приводной вал, соединенный с редуктором посредством клиноременной передачи, цепную передачу, включающую жестко закрепленную на приводном валу ведущую звездочку, цепь и ведомую звездочку, ползун с пальцем, жестко соединенным с цепью, промежуточную каретку, соединенную с пальцем, направляющую промежуточной каретки,...
Привід для ескалаторів
Номер патенту: 5575
Опубліковано: 28.12.1994
Автор: Петер Хефлінг
МПК: B66B 23/00
Мітки: привід, ескалаторів
Формула / Реферат:
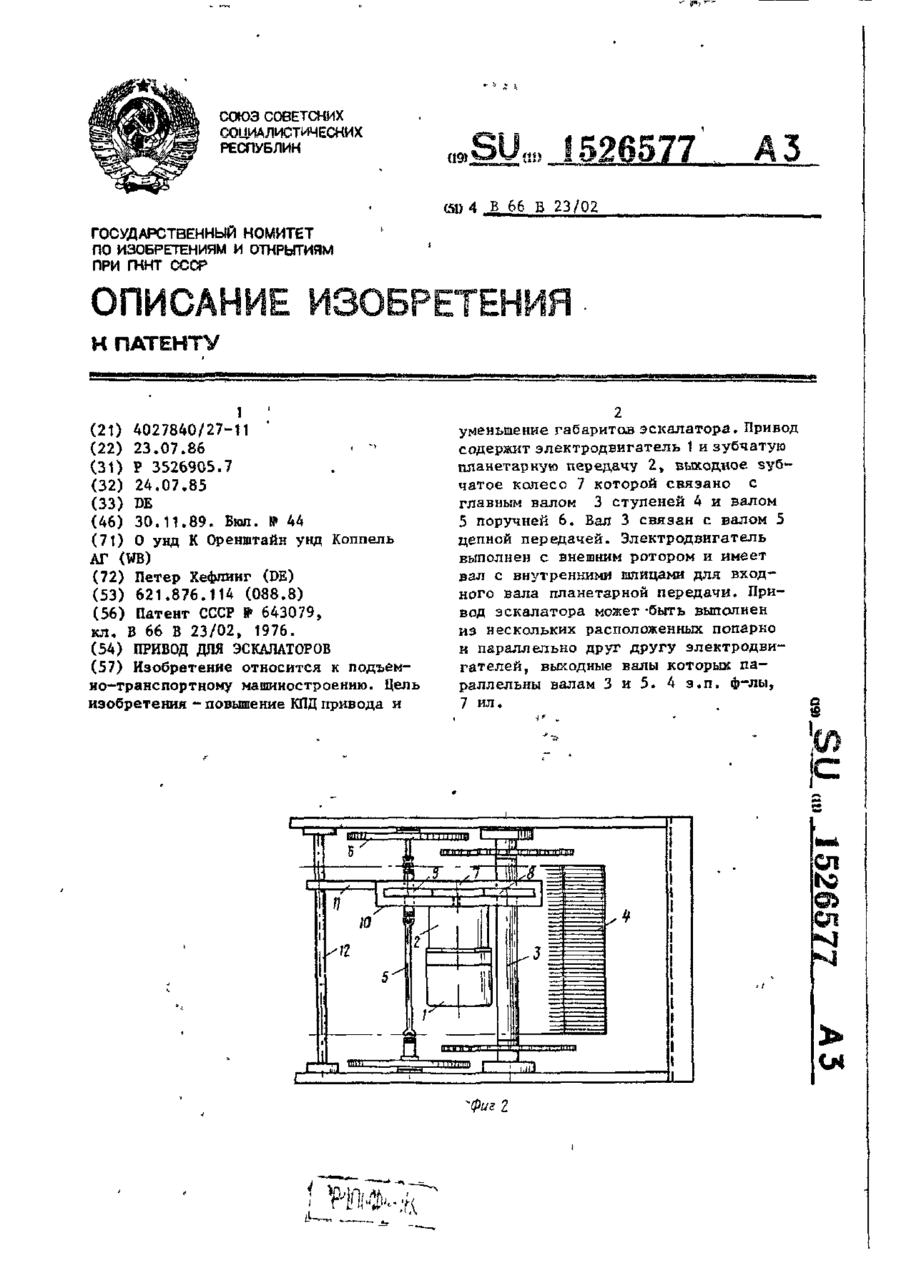
1. Привод для эскалаторов, содержащий электродвигатель и зубчатую передачу, кинематически связанную с главным валом ступеней и валом поручней, отличающийся тем, что, с целью повышения КПД привода и уменьшения габаритов эскалатора, электродвигатель и зубчатая передача, выполненная в виде планетарной передачи, включены в установленный между главным валом ступеней и валом поручней блок с общей центральной осью, параллельной им, а выходное...
Привід дистанційного управління розмикачем
Номер патенту: 14775
Опубліковано: 18.02.1997
Автор: Шумейко Василь Андрійович
МПК: H01H 31/00
Мітки: дистанційного, управління, привід, розмикачем
Формула / Реферат:
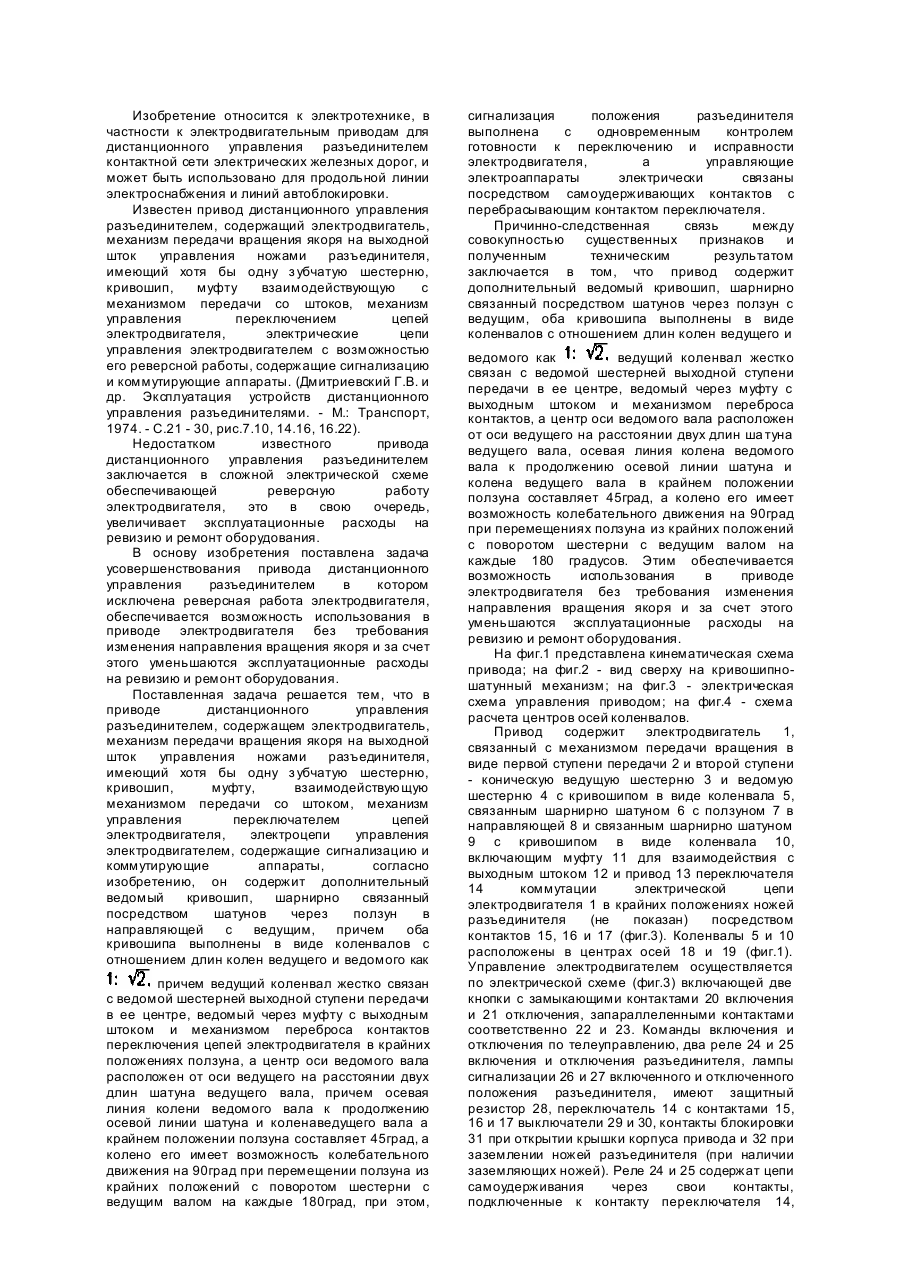
1. Привод дистанционного управления разъединителем, содержащий электродвигатель, механизм передачи вращения якоря на выходной шток управления ножами разъединителя, имеющий хотя бы одну зубчатую шестерню, кривошип, муфту, взаимодействующую механизмом передачи со штоком, механизм управления переключателем цепей электродвигателя, электроцепи управления электродвигателем, содержащие сигнализацию и коммутирующие аппараты, отличающийся тем, что он...
Привід кухонної машини
Номер патенту: 1536
Опубліковано: 25.07.1994
Автори: Сидорець Микола Іванович, Власенко Володимир Іванович, Головин Аркадій Олександрович, Калініченко Валентин Іванович, Петренко Микола Савельович
МПК: H02K 9/04, A47J 44/00
Мітки: машини, кухонної, привід
Формула / Реферат:
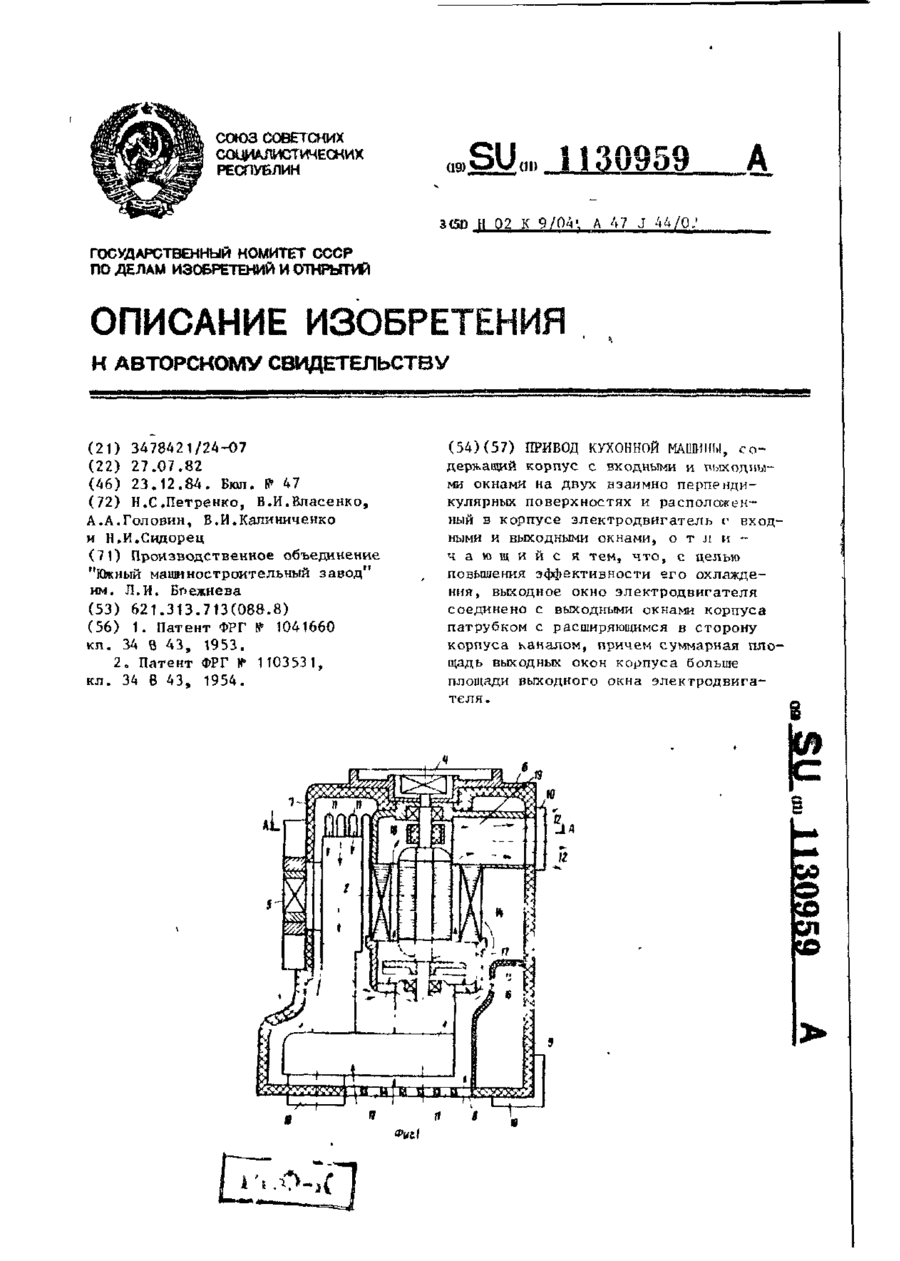
Привод кухонной машины, содержащий корпус с входными и выходными окнами на двух взаимно перпендикулярных поверхностях и расположенный в корпусе электродвигатель с входными и выходными окнами, отличающийся тем, что, с целью повышения эффективности его охлаждения, выходное окно электродвигателя соединено с выходными окнами корпуса патрубком с расширяющимся в сторону корпуса каналом, причем суммарная площадь выходных окон корпуса больше...
Привід спідометра автомобіля
Номер патенту: 9962
Опубліковано: 30.09.1996
Автори: Філіпов Олександр Васильович, Рощін Олександр Олександрович
МПК: B60K 25/00
Мітки: привід, автомобіля, спідометра
Формула / Реферат:
(57) Привод спидометра автомобиля, содержащий ведущее зубчатое колесо, взаимодействующее с ведомым зубчатым колесом, выполненным из пластмассы заодно с валом, нижняя опорная поверхность которого установлена в картере коробки передач, имеющей сапун, а верхняя опорная поверхность размещена в корпусе привода спидометра, торцевая поверхность которого, размещенная со стороны упомянутого зубчатого зацепления, взаимодействует с кольцевым выступом...
Попередній патент: Привід рукавичного автомата
Наступний патент: Спосіб вимірювання товщини ультразвуком та пристрій для його здійснення
Випадковий патент: Комбінований трансформаторно-реакторний захисний пристрій з лінійним регулятором і вольтододатковим трансформатором