Спосіб керування режимом роботи грохота
Формула / Реферат
Способ управления режимом работы грохота, основанный на поддержании максимальновозможной величины эффективности грохочення грохота путем изменения управляющих параметров, отличающийся тем, что изменение управляющих параметров производят путем непрерывного периодического приращения амплитуды, частоты качаний короба грохота и величины его угла наклона к горизонту и определения после каждого шага приращения управляющего параметра знака приращения величины эффективности грохочення грохота, причем при положительном приращении величины эффективности грохочення, вызванного приращением одного из управляющих параметров, продолжают изменять этот параметр в том же направлении, а при отрицательном приращения величины эффективности грохочення, изменяют знак приращения зтого управляющего параметра на противоположнмй, при достижении зкстре-мального значення величини зффективности гро-хочения управляющий параметр, подвергавшийся на данном зтапе регулировке, фиксируют до следу-ющей своей очереди на уровне, соответствующем зкстремальному значенню величини зффективности грохочення й переходят к регулировке другого управляющего параметра, при зтом в ряду очередности регулирования параметров величину угла наклона регулируют как после регулирования амплитуди, так й после регулирования частоти качаний.
Текст
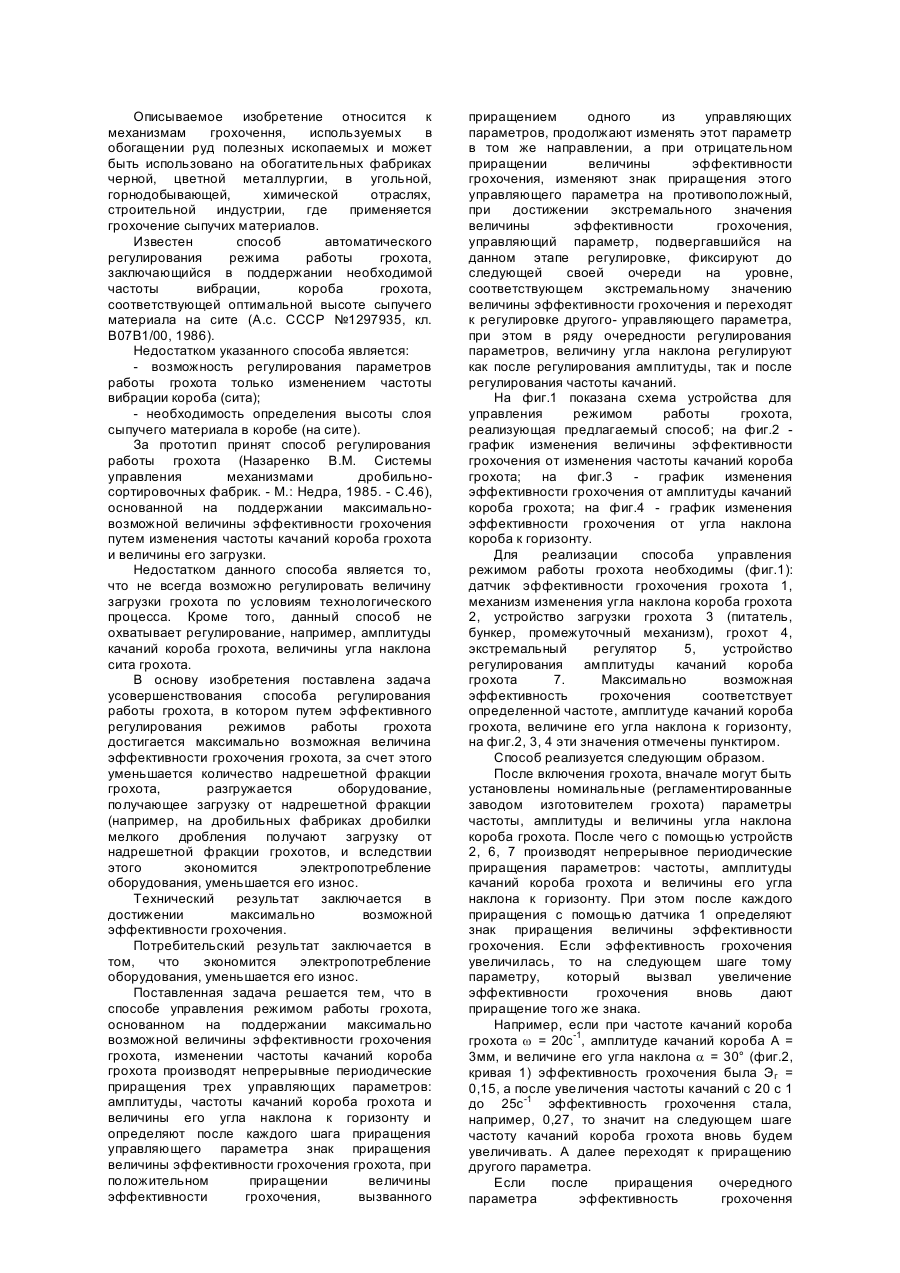
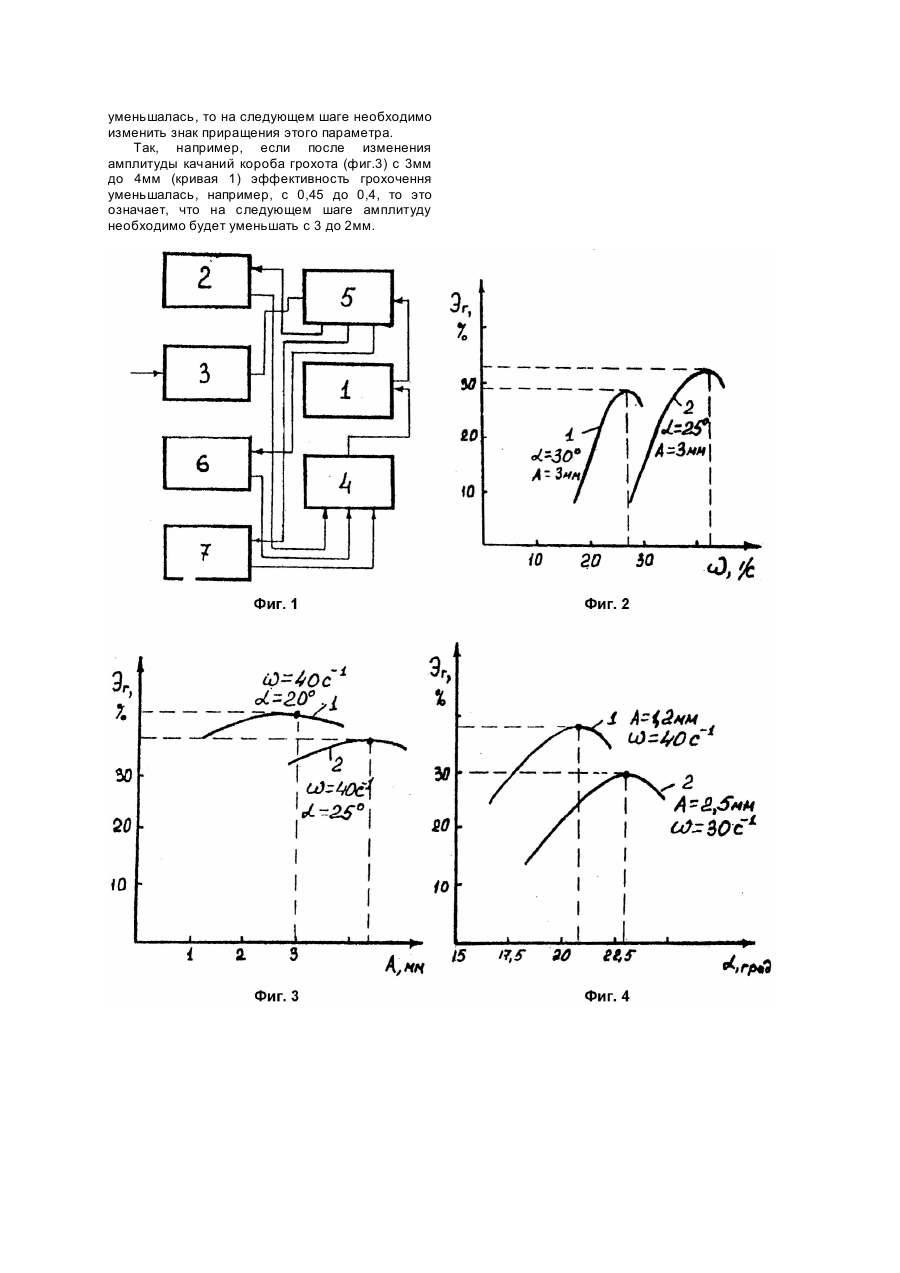
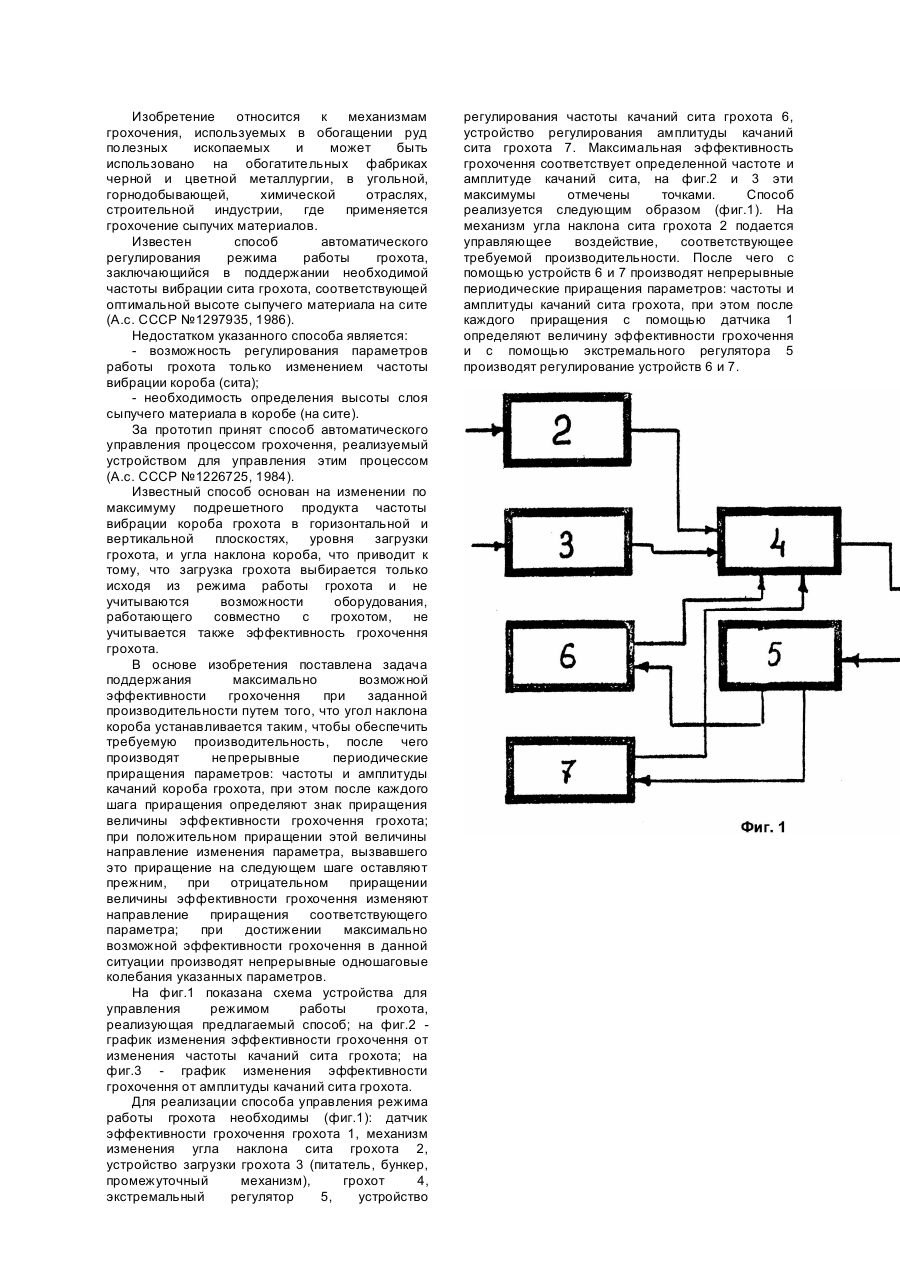
Описываемое изобретение относится к механизмам грохочення, используемых в обогащении руд полезных ископаемых и может быть использовано на обогатительных фабриках черной, цветной металлургии, в угольной, горнодобывающей, химической отраслях, строительной индустрии, где применяется грохочение сыпучих материалов. Известен способ автоматического регулирования режима работы грохота, заключающийся в поддержании необходимой частоты вибрации, короба грохота, соответствующей оптимальной высоте сыпучего материала на сите (А.с. СССР №1297935, кл. B07B1/00, 1986). Недостатком указанного способа является: - возможность регулирования параметров работы грохота только изменением частоты вибрации короба (сита); - необходимость определения высоты слоя сыпучего материала в коробе (на сите). За прототип принят способ регулирования работы грохота (Назаренко В.М. Системы управления механизмами дробильносортировочных фабрик. - М.: Недра, 1985. - С.46), основанной на поддержании максимальновозможной величины эффективности грохочения путем изменения частоты качаний короба грохота и величины его загрузки. Недостатком данного способа является то, что не всегда возможно регулировать величину загрузки грохота по условиям технологического процесса. Кроме того, данный способ не охватывает регулирование, например, амплитуды качаний короба грохота, величины угла наклона сита грохота. В основу изобретения поставлена задача усовершенствования способа регулирования работы грохота, в котором путем эффективного регулирования режимов работы грохота достигается максимально возможная величина эффективности грохочения грохота, за счет этого уменьшается количество надрешетной фракции грохота, разгружается оборудование, получающее загрузку от надрешетной фракции (например, на дробильных фабриках дробилки мелкого дробления получают загрузку от надрешетной фракции грохотов, и вследствии этого экономится электропотребление оборудования, уменьшается его износ. Технический результат заключается в достижении максимально возможной эффективности грохочения. Потребительский результат заключается в том, что экономится электропотребление оборудования, уменьшается его износ. Поставленная задача решается тем, что в способе управления режимом работы грохота, основанном на поддержании максимально возможной величины эффективности грохочения грохота, изменении частоты качаний короба грохота производят непрерывные периодические приращения трех управляющих параметров: амплитуды, частоты качаний короба грохота и величины его угла наклона к горизонту и определяют после каждого шага приращения управляющего параметра знак приращения величины эффективности грохочения грохота, при положительном приращении величины эффективности грохочения, вызванного приращением одного из управляющих параметров, продолжают изменять этот параметр в том же направлении, а при отрицательном приращении величины эффективности грохочения, изменяют знак приращения этого управляющего параметра на противоположный, при достижении экстремального значения величины эффективности грохочения, управляющий параметр, подвергавшийся на данном этапе регулировке, фиксируют до следующей своей очереди на уровне, соответствующем экстремальному значению величины эффективности грохочения и переходят к регулировке другого- управляющего параметра, при этом в ряду очередности регулирования параметров, величину угла наклона регулируют как после регулирования амплитуды, так и после регулирования частоты качаний. На фиг.1 показана схема устройства для управления режимом работы грохота, реализующая предлагаемый способ; на фиг.2 график изменения величины эффективности грохочения от изменения частоты качаний короба грохота; на фиг.3 - график изменения эффективности грохочения от амплитуды качаний короба грохота; на фиг.4 - график изменения эффективности грохочения от угла наклона короба к горизонту. Для реализации способа управления режимом работы грохота необходимы (фиг.1): датчик эффективности грохочения грохота 1, механизм изменения угла наклона короба грохота 2, устройство загрузки грохота 3 (питатель, бункер, промежуточный механизм), грохот 4, экстремальный регулятор 5, устройство регулирования амплитуды качаний короба грохота 7. Максимально возможная эффективность грохочения соответствует определенной частоте, амплитуде качаний короба грохота, величине его угла наклона к горизонту, на фиг.2, 3, 4 эти значения отмечены пунктиром. Способ реализуется следующим образом. После включения грохота, вначале могут быть установлены номинальные (регламентированные заводом изготовителем грохота) параметры частоты, амплитуды и величины угла наклона короба грохота. После чего с помощью устройств 2, 6, 7 производят непрерывное периодические приращения параметров: частоты, амплитуды качаний короба грохота и величины его угла наклона к горизонту. При этом после каждого приращения с помощью датчика 1 определяют знак приращения величины эффективности грохочения. Если эффективность грохочения увеличилась, то на следующем шаге тому параметру, который вызвал увеличение эффективности грохочения вновь дают приращение того же знака. Например, если при частоте качаний короба грохота w = 20с-1, амплитуде качаний короба A = 3мм, и величине его угла наклона a = 30° (фиг.2, кривая 1) эффективность грохочения была Эг = 0,15, а после увеличения частоты качаний с 20 с 1 до 25с-1 эффективность грохочення стала, например, 0,27, то значит на следующем шаге частоту качаний короба грохота вновь будем увеличивать. А далее переходят к приращению другого параметра. Если после приращения очередного параметра эффективность грохочення уменьшалась, то на следующем шаге необходимо изменить знак приращения этого параметра. Так, например, если после изменения амплитуды качаний короба грохота (фиг.3) с 3мм до 4мм (кривая 1) эффективность грохочення уменьшалась, например, с 0,45 до 0,4, то это означает, что на следующем шаге амплитуду необходимо будет уменьшать с 3 до 2мм.
ДивитисяДодаткова інформація
Автори англійськоюNazarenko Mykhailo Volodymyrovych
Автори російськоюНазаренко Михаил Владимирович
МПК / Мітки
МПК: B07B 1/00
Мітки: роботи, грохота, режимом, керування, спосіб
Код посилання
<a href="https://ua.patents.su/2-21407-sposib-keruvannya-rezhimom-roboti-grokhota.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування режимом роботи грохота</a>
Спосіб керування режимом роботи грохота
Номер патенту: 17168
Опубліковано: 18.03.1997
Автор: Назаренко Михайло Володимирович
МПК: B07B 1/00
Мітки: керування, грохота, режимом, роботи, спосіб
Формула / Реферат:
Способ управления режимом работы грохота, основанный на изменении частоты вибрации короба грохота в горизонтальной и вертикальной плоскостях, уровня загрузки грохота и угла наклона короба, отличающийся тем, что угол наклона грохота устанавливают в зависимости от требуемой производительности, после чего непрерывно производят поочередные пошаговые изменения параметров: частоты и амплитуды качаний сита грохота, при этом после каждого шага...
Пристрій для регулювання кута нахилу грохота
Номер патенту: 18036
Опубліковано: 17.06.1997
Автори: Назаренко Михайло Володимирович, Танцюра Костянтин Анатольович
МПК: B07B 1/28
Мітки: регулювання, кута, пристрій, грохота, нахилу
Формула / Реферат:
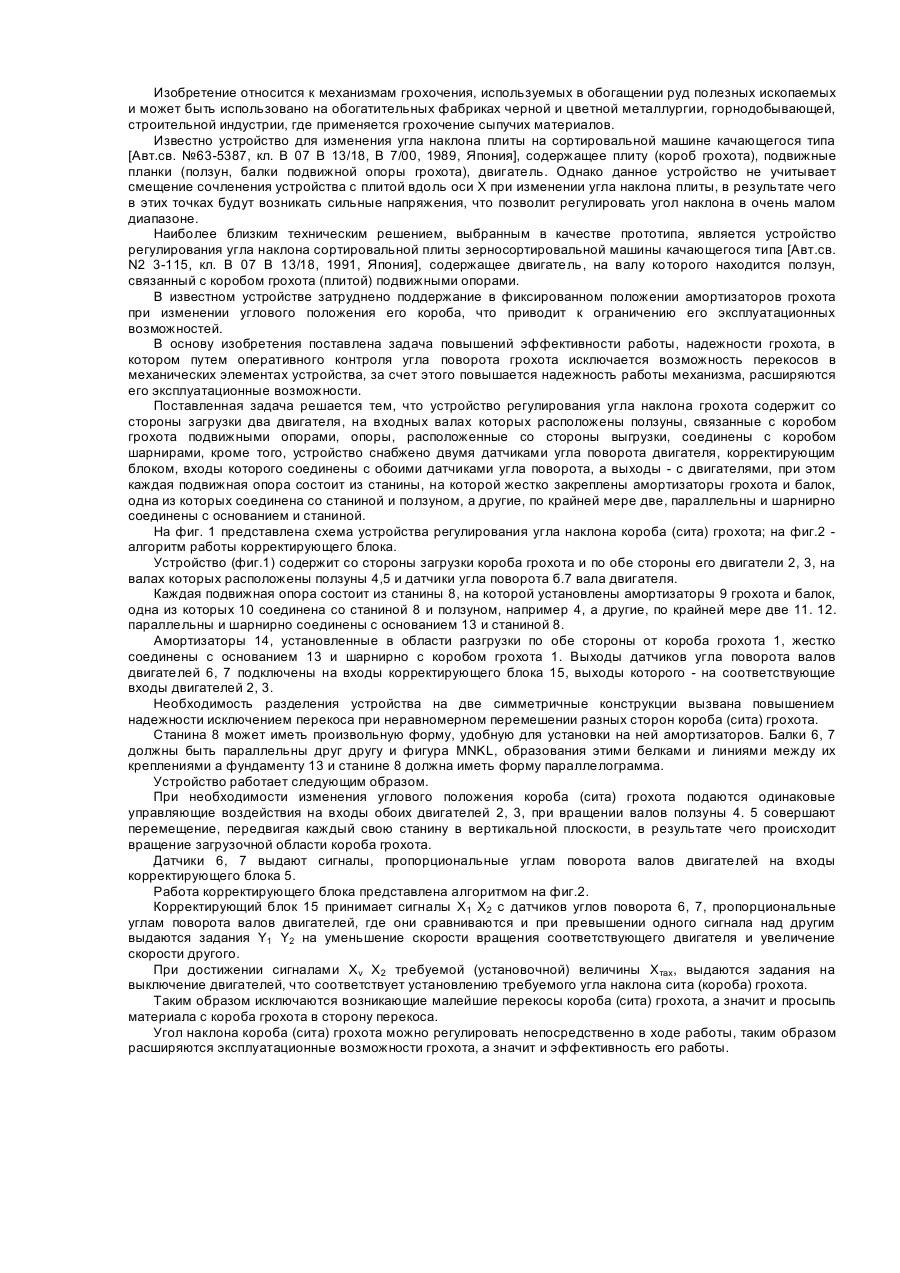
Устройство для регулирования угла наклона грохота, содержащее двигатель, на валу которого находится ползун, связанный с коробом грохота подвижными опорами, отличающаяся тем, что устройство снабжено дополнительным двигателем двумя датчиками угла поворота двигателя, корректирующим блоком, входы которого соединены с обоими датчиками угла поворота, а выходы - с двигателями, при этом каждая подвижная опора состоит из станины, на которой...
Спосіб діагностики поточної ефективності грохотіння
Номер патенту: 17155
Опубліковано: 18.03.1997
Автор: Назаренко Михайло Володимирович
МПК: B07B 1/00
Мітки: спосіб, грохотіння, ефективності, діагностики, поточної
Формула / Реферат:
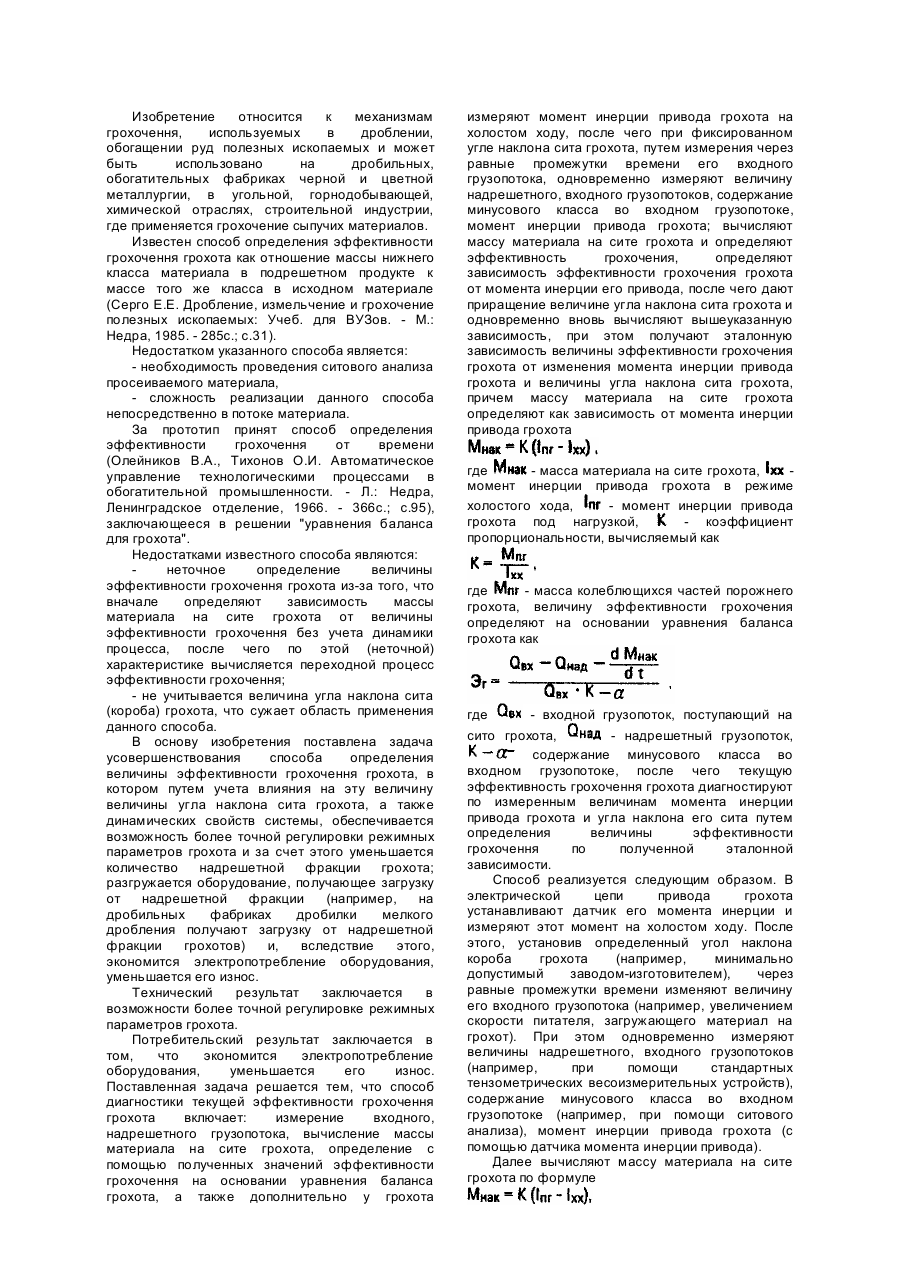
Способ диагностики текущей эффективности грохочення, включающий измерение входного, надрешетного грузопотока, вычисление массы материала на сите грохота, определение по результатам вычислений эффективности грохочення на основании уравнения баланса грохота, отличающийся тем, что у грохота дополнительно измеряют момент инерции привода грохота на холостом ходу, после чего при фиксированном угле наклона сита грохота и изменении через равные...
Сито грохота
Номер патенту: 5112
Опубліковано: 28.12.1994
Автори: Гольдін Арон Абрамович, Червоненко Альфред Григорович, Надутий Володимир Петрович
МПК: B07B 1/46
Формула / Реферат:
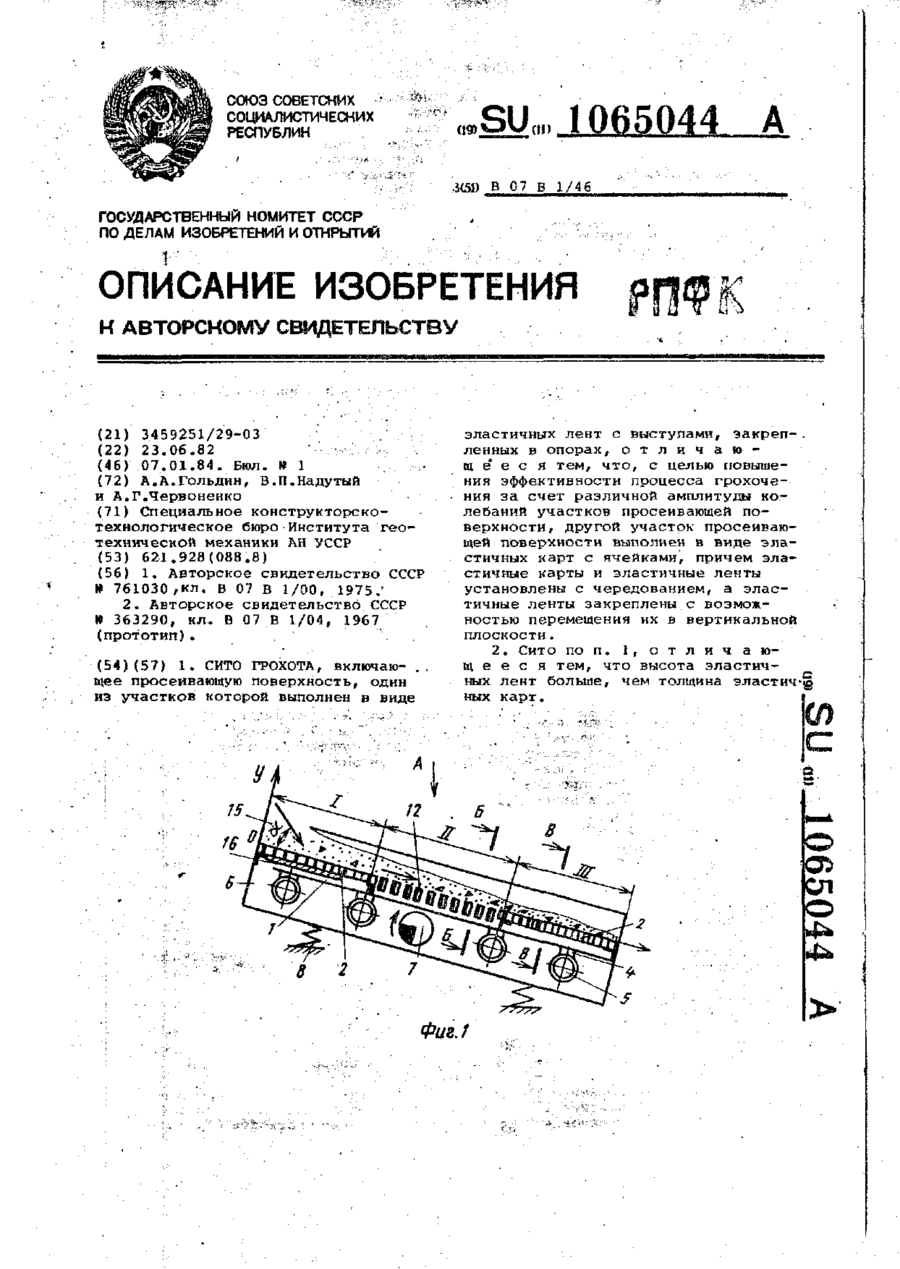
1. Сито грохота, включающее просеивающую поверхность, один из участков которой выполнен в виде эластичных лент с выступами, закрепленных в опорах, отличающееся тем, что, с целью повышения эффективности процесса грохочения за счет различной амплитуды колебаний участков просеивающей поверхности, другой участок просеивающей поверхности выполнен в виде эластичных карт с ячейками, причем эластичные карты и эластичные ленты установлены с...
Пристрій для керування електричним режимом дугової сталеплавильної печі постійного струму
Номер патенту: 3022
Опубліковано: 26.12.1994
Автори: Саньков Сергій Анатолійович, Маш'янов Володимир Гаврилович, Магда Володимир Васильович, Малиновський Володимир Сергійович, Філіпов Олексій Костянтинович
МПК: H05B 7/148
Мітки: пристрій, струму, керування, сталеплавильної, дугової, електричним, постійного, печі, режимом
Формула / Реферат:
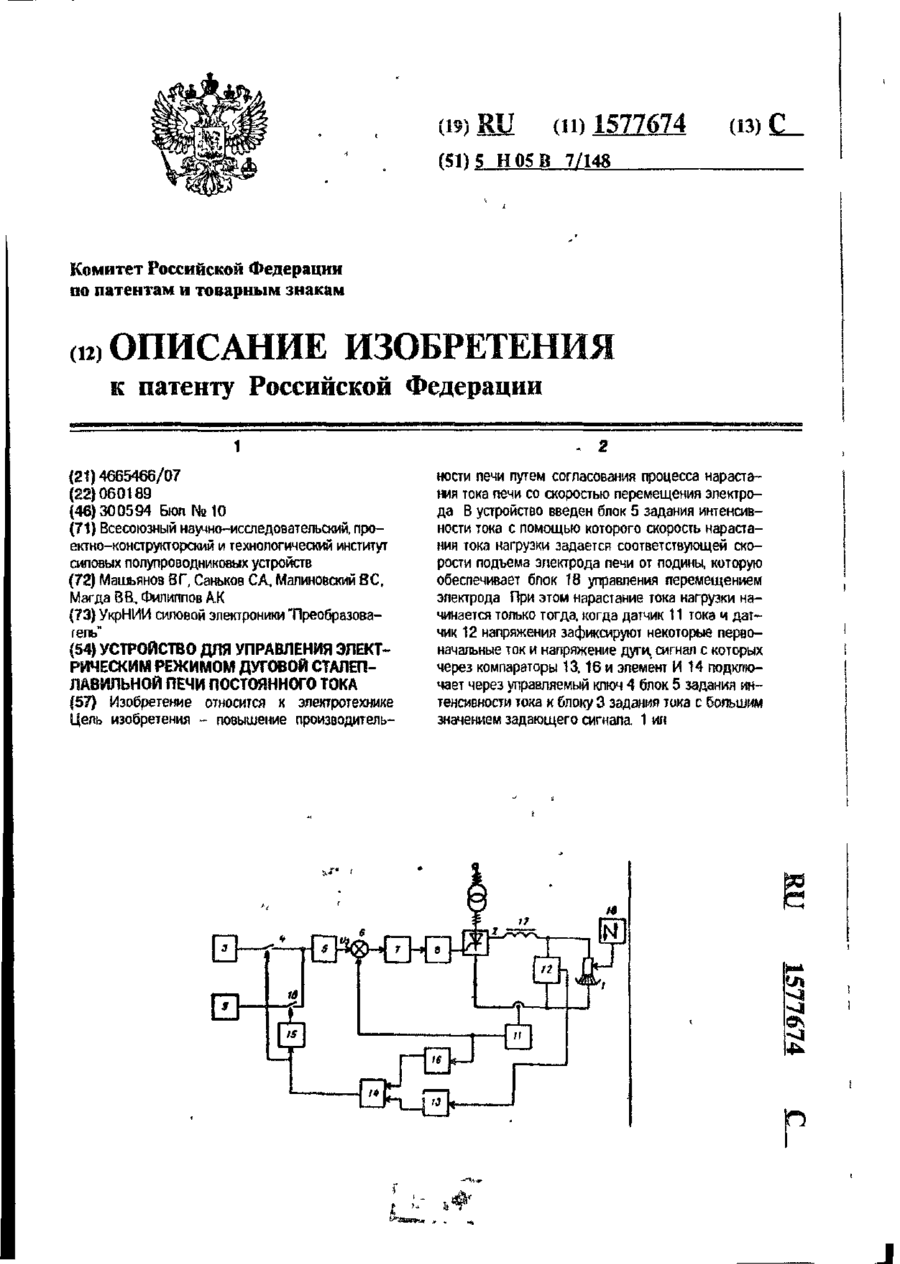
Устройство для управления электрическим режимом дуговой сталеплавильной печи постоянного тока, содержащее блок управления перемещением электрода, датчик тока электрода, выход которого соединен с первым входом блока сравнения, соединенного выходом с входом регулятора тока, выход которого соединен с входом системы импульсно-фазового управления источника питания, первый и второй блоки задания тока, первый и второй управляемые ключи и датчик...
Попередній патент: Цифровий т-генератор функцій
Наступний патент: Сплав на основі алюмінію для покриттів
Випадковий патент: Спосіб хірургічного гемостазу гострокровоточивої дуоденальної виразки