Вимірювач крутного моменту
Формула / Реферат
Вимірювач крутного моменту, що має колесо з пружним елементом, який відрізняється тим, що він виконаний у вигляді сигнального колеса з сендвічоподібним пружним елементом, яке має ідентичні вимірювальні, наприклад зубцюваті, диски, нерухомо закріплені на співвісних валах двигуна і виконавчого механізму, що встановлені з можливістю пружного взаємного радіального зсуву на величину, пропорційну зростаючому навантаженню на валах, при цьому кожен диск безконтактно зв'язаний з імпульсним датчиком для реєстрації частоти обертання валів під час постійного чи змінного навантаження, що викликає зсув фази інформаційних імпульсів, які надходять.
Текст
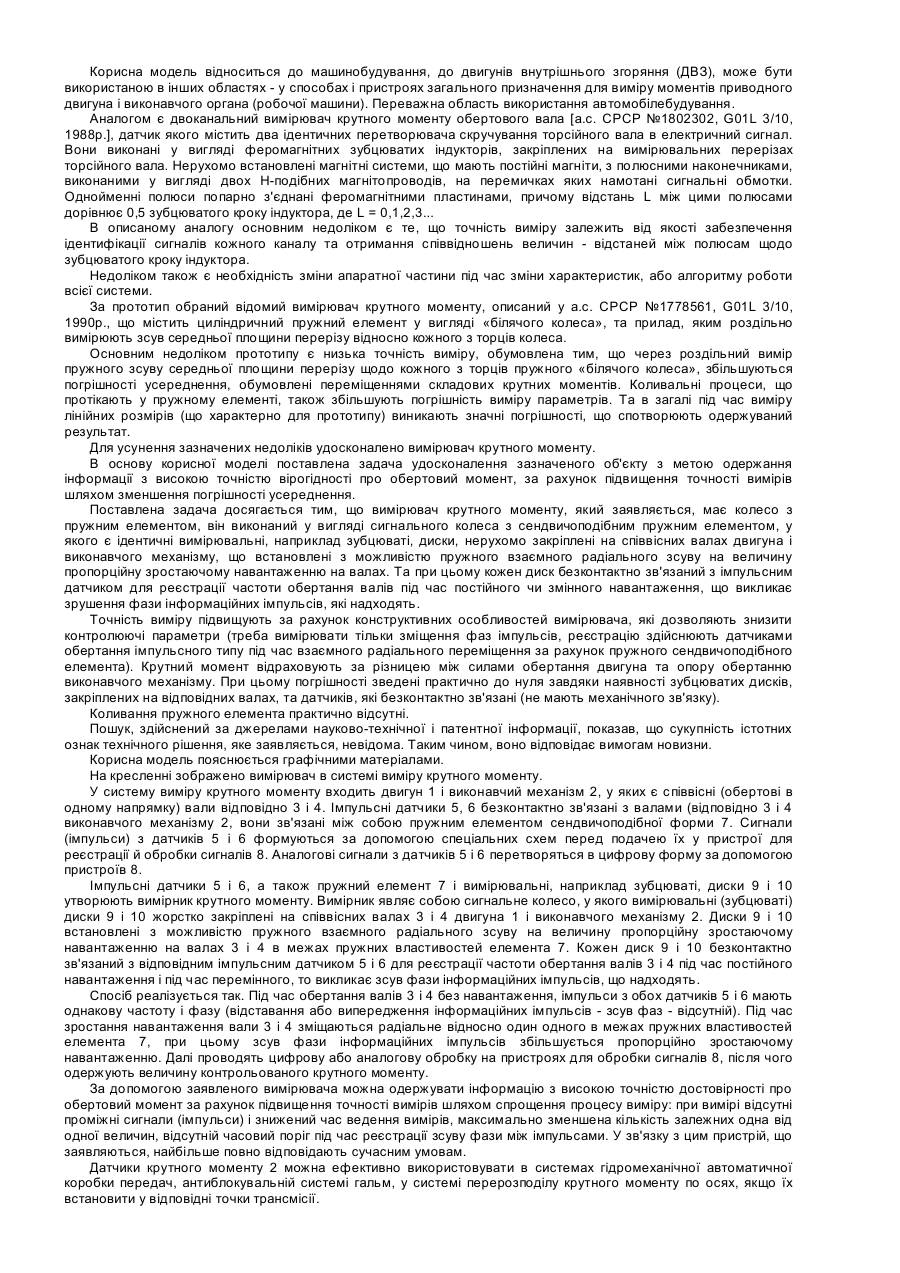
Корисна модель відноситься до машинобудування, до двигунів внутрішнього згоряння (ДВЗ), може бути використаною в інших областях - у способах і пристроях загального призначення для виміру моментів приводного двигуна і виконавчого органа (робочої машини). Переважна область використання автомобілебудування. Аналогом є двоканальний вимірювач крутного моменту обертового вала [а.с. СРСР №1802302, G01L 3/10, 1988р.], датчик якого містить два ідентичних перетворювача скручування торсійного вала в електричний сигнал. Вони виконані у вигляді феромагнітних зубцюватих індукторів, закріплених на вимірювальних перерізах торсійного вала. Нерухомо встановлені магнітні системи, що мають постійні магніти, з полюсними наконечниками, виконаними у вигляді двох Н-подібних магнітопроводів, на перемичках яких намотані сигнальні обмотки. Однойменні полюси попарно з'єднані феромагнітними пластинами, причому відстань L між цими полюсами дорівнює 0,5 зубцюватого кроку індуктора, де L = 0,1,2,3... В описаному аналогу основним недоліком є те, що точність виміру залежить від якості забезпечення ідентифікації сигналів кожного каналу та отримання співвідношень величин - відстаней між полюсам щодо зубцюватого кроку індуктора. Недоліком також є необхідність зміни апаратної частини під час зміни характеристик, або алгоритму роботи всієї системи. За прототип обраний відомий вимірювач крутного моменту, описаний у а.с. СРСР №1778561, G01L 3/10, 1990р., що містить циліндричний пружний елемент у вигляді «білячого колеса», та прилад, яким роздільно вимірюють зсув середньої площини перерізу відносно кожного з торців колеса. Основним недоліком прототипу є низька точність виміру, обумовлена тим, що через роздільний вимір пружного зсуву середньої площини перерізу щодо кожного з торців пружного «білячого колеса», збільшуються погрішності усереднення, обумовлені переміщеннями складових крутних моментів. Коливальні процеси, що протікають у пружному елементі, також збільшують погрішність виміру параметрів. Та в загалі під час виміру лінійних розмірів (що характерно для прототипу) виникають значні погрішності, що спотворюють одержуваний результат. Для усунення зазначених недоліків удосконалено вимірювач крутного моменту. В основу корисної моделі поставлена задача удосконалення зазначеного об'єкту з метою одержання інформації з високою точністю вірогідності про обертовий момент, за рахунок підвищення точності вимірів шляхом зменшення погрішності усереднення. Поставлена задача досягається тим, що вимірювач крутного моменту, який заявляється, має колесо з пружним елементом, він виконаний у вигляді сигнального колеса з сендвичоподібним пружним елементом, у якого є ідентичні вимірювальні, наприклад зубцюваті, диски, нерухомо закріплені на співвісних валах двигуна і виконавчого механізму, що встановлені з можливістю пружного взаємного радіального зсуву на величину пропорційну зростаючому навантаженню на валах. Та при цьому кожен диск безконтактно зв'язаний з імпульсним датчиком для реєстрації частоти обертання валів під час постійного чи змінного навантаження, що викликає зрушення фази інформаційних імпульсів, які надходять. Точність виміру підвищують за рахунок конструктивних особливостей вимірювача, які дозволяють знизити контролюючі параметри (треба вимірювати тільки зміщення фаз імпульсів, реєстрацію здійснюють датчиками обертання імпульсного типу під час взаємного радіального переміщення за рахунок пружного сендвичоподібного елемента). Крутний момент відраховують за різницею між силами обертання двигуна та опору обертанню виконавчого механізму. При цьому погрішності зведені практично до нуля завдяки наявності зубцюватих дисків, закріплених на відповідних валах, та датчиків, які безконтактно зв'язані (не мають механічного зв'язку). Коливання пружного елемента практично відсутні. Пошук, здійснений за джерелами науково-технічної і патентної інформації, показав, що сукупність істотних ознак технічного рішення, яке заявляється, невідома. Таким чином, воно відповідає вимогам новизни. Корисна модель пояснюється графічними матеріалами. На кресленні зображено вимірювач в системі виміру крутного моменту. У систему виміру крутного моменту входить двигун 1 і виконавчий механізм 2, у яких є співвісні (обертові в одному напрямку) вали відповідно 3 і 4. Імпульсні датчики 5, 6 безконтактно зв'язані з валами (відповідно 3 і 4 виконавчого механізму 2, вони зв'язані між собою пружним елементом сендвичоподібної форми 7. Сигнали (імпульси) з датчиків 5 і 6 формуються за допомогою спеціальних схем перед подачею їх у пристрої для реєстрації й обробки сигналів 8. Аналогові сигнали з датчиків 5 і 6 перетворяться в цифрову форму за допомогою пристроїв 8. Імпульсні датчики 5 і 6, а також пружний елемент 7 і вимірювальні, наприклад зубцюваті, диски 9 і 10 утворюють вимірник крутного моменту. Вимірник являє собою сигнальне колесо, у якого вимірювальні (зубцюваті) диски 9 і 10 жорстко закріплені на співвісних валах 3 і 4 двигуна 1 і виконавчого механізму 2. Диски 9 і 10 встановлені з можливістю пружного взаємного радіального зсуву на величину пропорційну зростаючому навантаженню на валах 3 і 4 в межах пружних властивостей елемента 7. Кожен диск 9 і 10 безконтактно зв'язаний з відповідним імпульсним датчиком 5 і 6 для реєстрації частоти обертання валів 3 і 4 під час постійного навантаження і під час перемінного, то викликає зсув фази інформаційних імпульсів, що надходять. Спосіб реалізується так. Під час обертання валів 3 і 4 без навантаження, імпульси з обох датчиків 5 і 6 мають однакову частоту і фазу (відставання або випередження інформаційних імпульсів - зсув фаз - відсутній). Під час зростання навантаження вали 3 і 4 зміщаються радіальне відносно один одного в межах пружних властивостей елемента 7, при цьому зсув фази інформаційних імпульсів збільшується пропорційно зростаючому навантаженню. Далі проводять цифрову або аналогову обробку на пристроях для обробки сигналів 8, після чого одержують величину контрольованого крутного моменту. За допомогою заявленого вимірювача можна одержувати інформацію з високою точністю достовірності про обертовий момент за рахунок підвищення точності вимірів шляхом спрощення процесу виміру: при вимірі відсутні проміжні сигнали (імпульси) і знижений час ведення вимірів, максимально зменшена кількість залежних одна від одної величин, відсутній часовий поріг під час реєстрації зсуву фази між імпульсами. У зв'язку з цим пристрій, що заявляються, найбільше повно відповідають сучасним умовам. Датчики крутного моменту 2 можна ефективно використовувати в системах гідромеханічної автоматичної коробки передач, антиблокувальній системі гальм, у системі перерозподілу крутного моменту по осях, якщо їх встановити у відповідні точки трансмісії.
ДивитисяДодаткова інформація
Назва патенту англійськоюTorque measuring unit
Автори англійськоюMiakotin Dmytro Оlекsаndrоvусh
Назва патенту російськоюИзмеритель крутящего момента
Автори російськоюМякотин Дмитрий Александрович
МПК / Мітки
МПК: G01L 3/00, G01L 3/10, F02D 3/00
Мітки: моменту, крутного, вимірювач
Код посилання
<a href="https://ua.patents.su/2-23762-vimiryuvach-krutnogo-momentu.html" target="_blank" rel="follow" title="База патентів України">Вимірювач крутного моменту</a>
Цифровий вимірювач крутного моменту і потужності газотурбінного двигуна
Номер патенту: 29064
Опубліковано: 16.10.2000
Автори: Савічев Серафім Павлович, Гапєєв Володимир Опанасович, Зубенін Сергій Дмитрович, Лященко Валентин Григорович
МПК: G01L 3/00
Мітки: вимірювач, цифровий, потужності, моменту, двигуна, крутного, газотурбінного
Формула / Реферат:
Цифровий вимірювач крутного моменту і потужності газотурбінного двигуна, що містить вал з пружним відрізком, на кінцях якого розміщені дві шестерні з зубцями, що діють на імпульсні датчики, підключені через узгоджуючи пристрої лічильного входу тригepa і першої схеми збіжності, вихід якої підключений на роздільний вхід тригера, а вихід тригера підключений на другий вхід другої схеми збіжності, на перший вхід якої підключений вихід генератора...
Вимірювач крутного моменту
Номер патенту: 34098
Опубліковано: 15.02.2001
Автори: Назар Іван Йосипович, Пік Андрій Іванович, Безпальок Андрій Петрович, Гевко Роман Богданович, Дмитрів Дмитро Володимирович
Мітки: вимірювач, моменту, крутного
Текст:
...взаємодіють з еластичними елементами 5, наприклад гумовими, які розташовані в дугових пазах 4. Пальці 3 взаємодіють з пружним елементом. виконаним у вигляді відтискних пластин 6, які в свою чергу контактують з натискним диском 7. Торцева поверхня натискного диска 7 взаємодіє зі щупом регіструючого приладу 9. Натискний диск 7 підтиснутий осьовою пружиною 10, в сторону відтискних пластин 6, яка в свою чергу фіксується гвинтами 11. Як варіанти,...
Вимірювач крутного моменту
Номер патенту: 70691
Опубліковано: 15.10.2004
Автори: Дмитрів Василь Тарасович, Жінчин Ярослав Семенович, Сиротюк Валерій Миколайович, Банга Василь Іванович
Мітки: крутного, моменту, вимірювач
Формула / Реферат:
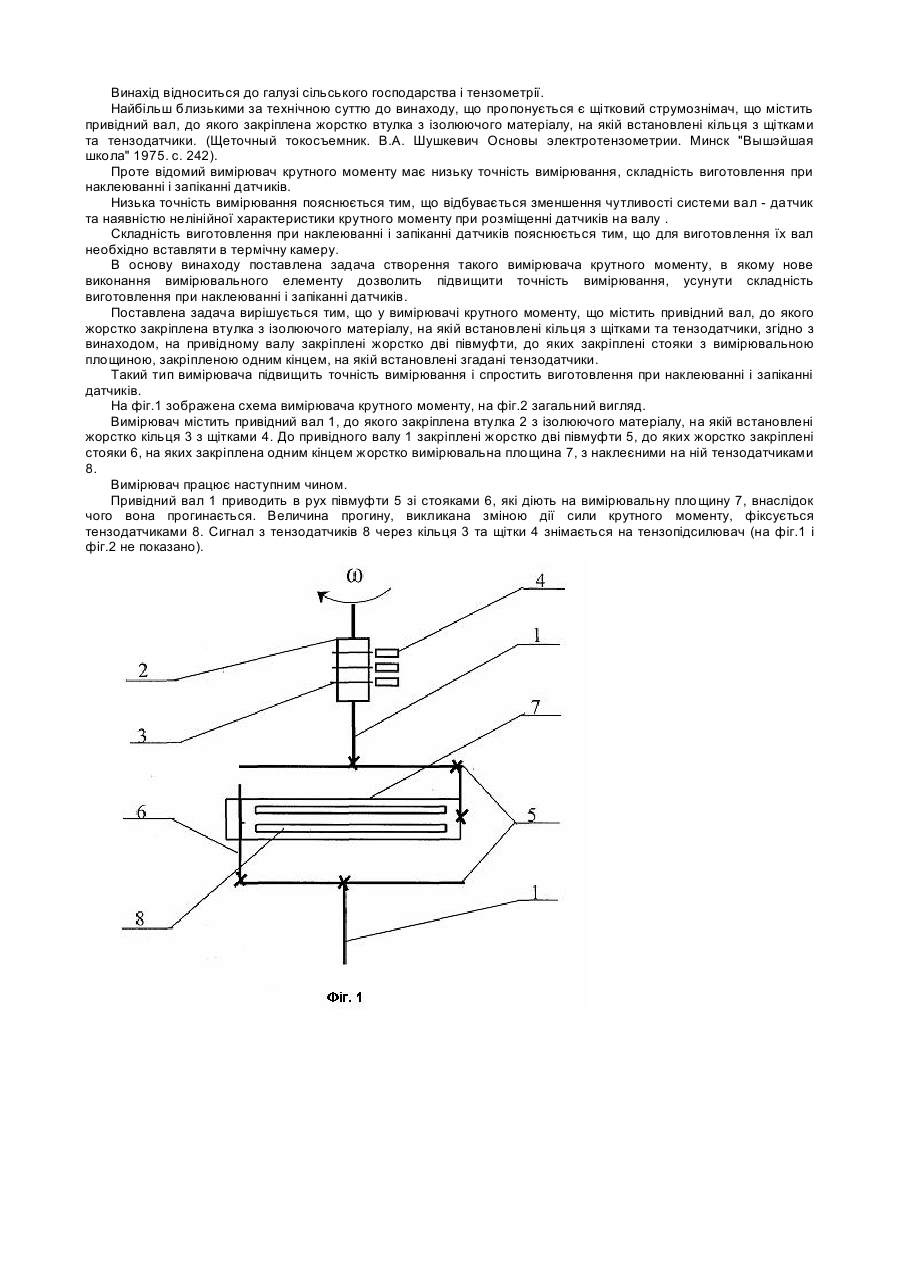
Вимірювач крутного моменту, що містить привідний вал, до якого жорстко закріплена втулка з ізолюючого матеріалу, на якій встановлені кільця з щітками та тензодатчики, який відрізняється тим, що на привідному валу закріплені жорстко дві півмуфти, до яких прикріплені стояки з вимірювальною площиною, закріпленою одним кінцем, на якій встановлені згадані тензодатчики.
Вимірювач крутного моменту
Номер патенту: 51100
Опубліковано: 15.11.2002
Автори: Васильків Василь Васильович, Гевко Роман Богданович, Радик Дмитро Леонидович
МПК: G01L 3/04
Мітки: моменту, крутного, вимірювач
Формула / Реферат:
1. Вимірювач крутного моменту, що містить співвісно розміщені дві півмуфти, з'єднані пружинним елементом, який відрізняється тим, що пружинний елемент виконаний у вигляді набору пружинних стрижнів, встановлених під кутом до осі обертання вимірювача крутного моменту і нерухомо з'єднаних з обома півмуфтами.2. Вимірювач за п. 1, який відрізняється тим, що кожна півмуфта складається з маточини та фланця, причому фланець жорстко закріплено...
Вимірювач крутного моменту
Номер патенту: 22759
Опубліковано: 25.04.2007
Автори: Волинкін Микола Петрович, Венгер Микола Анатолійович, Божок Аркадій Михайлович
МПК: G01L 3/00
Мітки: вимірювач, крутного, моменту
Формула / Реферат:
Вимірювач крутного моменту, що містить ведучу і ведену ланки, установлені на ведучому і веденому валах і виконані у вигляді дисків, з'єднані за допомогою пружин, проміжну, установлену на ведучій ланці, ланку із стержнями і штовхачами з можливістю взаємодіяти з пружинами і вихід, який відрізняється тим, що ведуча і ведена ланки виконані у вигляді рухомої і нерухомої півмуфт, з'єднаних між собою принаймні двома тягами регульованої довжини, за...
Попередній патент: Панель керування гусеничної машини
Наступний патент: Спосіб оптимізації керування силовим агрегатом механічного транспортного засобу
Випадковий патент: Установка для зброджування цукровмісних середовищ