Спосіб оптимізації керування силовим агрегатом механічного транспортного засобу
Формула / Реферат
Спосіб оптимізації керування силовим агрегатом механічного транспортного засобу, який полягає в тому, що спочатку вимірюють поточні параметри роботи двигуна, визначають його режим роботи за встановленими параметрами та реєструють поточні значення крутного моменту, а потім критерій регулювання порівнюють із заздалегідь заданим для даного режиму та формують сигнал керування, який відрізняється тим, що реєстрацію поточного значення крутного моменту і величину навантаження двигуна визначають датчиком навантаження силового агрегату, виконаним у вигляді датчика крутного моменту, їх визначають за безперервним показником потужності, яку витрачає силовий агрегат на подолання сил опору рухові, причому візуалізація сигналу вказаного датчика в реальному проміжку часу здійснюється графічно у вигляді проекції вектора, який підсумовує рушійні сили і сили опору рухові, що діють на транспортний засіб.
Текст
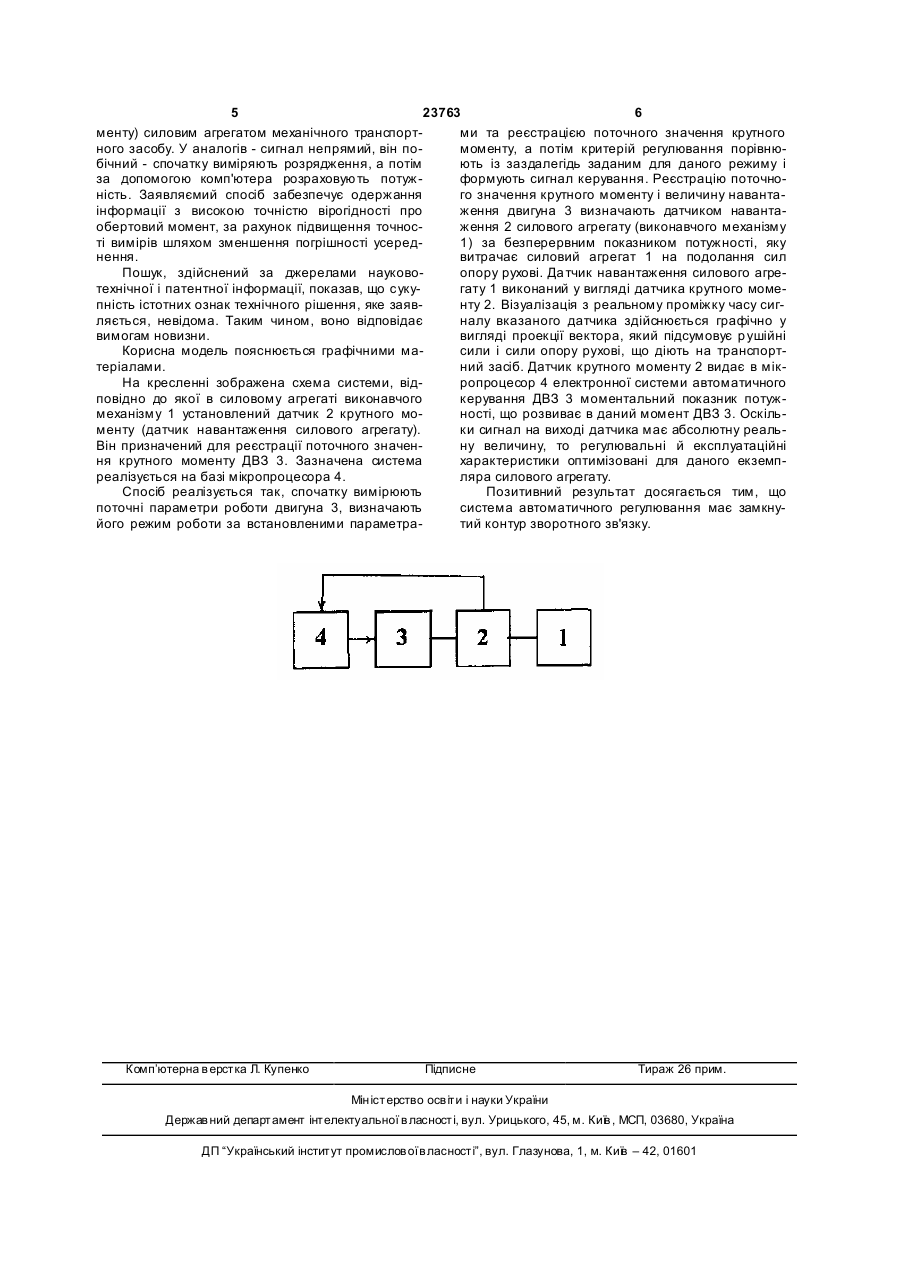
Спосіб оптимізації керування силовим агрегатом механічного транспортного засобу, який полягає в тому, що спочатку вимірюють поточні параметри роботи двигуна, визначають його режим роботи за встановленими параметрами та реєструють поточні значення крутного моменту, а потім критерій регулювання порівнюють із заздалегідь 3 23763 4 даних формує сигнал керування комутатором. також кут випередження запалювання (упорскуУ цій системі частота обертання колінчатого вання) паливної суміші в залежності від заданого вала визначається шляхом підрахунку імпульсів, режиму роботи ДВЗ. У якості одного з вхідних сигформованих датчиком оборотів за заданий період налів для роботи мікропроцесора служить показчасу. Характеристики системи змінюються шляхом ник величини навантаження двигуна, для формузміни вмісту постійно запам'ятовуючого пристрою. вання якого використовують датчик абсолютного Характеристики кута випередження запалювання тиску (розрідження), установлюваний у середині визначаються кількістю зубів диска. Дана система впускного колектора ДВЗ. передбачає взаємозв'язок трьох параметрів двиДо недоліків прототипу варто віднести те, що гуна: частоти обертання колінчатого вала, наванцей показник не вказує на імовірність реального таження, кута випередження запалювання. навантаження на виході силового агрегату, тому Основним недоліком даної системи є необхідщо цей показник є непрямим, він побічний. Крім ність її реалізації у вигляді замовлених великих того, мікропроцесор має обмежене число програм, інтегральних схем. Крім того, є потреба у зміні які для конкретного типу силового агрегату є усеапаратної частини після зміни характеристик кута редненими результатами лабораторних іспитів випередження запалювання чи алгоритму роботи великої кількості зразків. З цієї причини регулювасистеми запалювання. льні характеристики електронної системи автомаЦих недоліків позбавлені системи з програмутичного керування ДВЗ і експлуатаційні показники вальною логікою, у яких при зміні алгоритму робосилового агрегату є усередненими. Вони не врати системи необхідно заміняти керуючу програму і ховують особливостей реального екземпляра, а вести дані в постійно запам'ятовуючий пристрій. також інші фактори, наприклад знос двигуна. Одним з об'єктів, на яких застосовується мікроДля усунення зазначених недоліків удосконаЕВМ для обчислення масиву значень, є автомолено спосіб керування силовим агрегатом механібіль. Така система описана, наприклад, у [патенті чного транспортного засобу (переважно, автомоУкраїни на винахід №21636, G 01 L 3/10, 1997р.] біля). (інший аналог), у якій одночасно реєструється куВ основу корисної моделі поставлена задача тове положення ротора і крутний момент, на ньоудосконалення способу з метою одержання інфому. В описаному аналогу спочатку вимірюють пормації з високою точністю вірогідності про обертоточні параметри роботи, визначають режим вий момент, за рахунок підвищення точності виміроботи двигуна по параметрах з реєстрацією порів шляхом зменшення погрішності усереднення. точного значення крутного моменту, а значення Метою створення способу оптимізації керупускового моменту в даному кутовому положенні вання силовим агрегатом механічного транспортротора знаходять за визначеною залежністю. Поного засобу є забезпечення автоматичного підботім критерій регулювання порівнюють із заздалера потужності під час зміни навантаження з гідь заданим для даного режиму і формують сигпідтримкою постійних оборотів ДВЗ для регулюнал керування. При цьому приводний вання подачі палива в ДВЗ, забезпечення оптиміелектродвигун обертають протягом одного оборозації кута випередження запалювання і оптимізації ту без його з'єднання з валом випробовуваного пальної суміші за параметрами навантаженості електродвигуна та у процесі обертання реєструДВЗ, стабільності сили опору, тиску згоряння і крують поточне значення крутного моменту, а потім тного моменту. А також зменшення моменту інервизначають значення пускового моменту. ції обертових мас, стабілізації кількості кінетичної Описаний аналог має недолік, який полягає в енергії цих мас. тім, що при обчисленні за допомогою мікроЕВМ Поставлена задача досягається тим, що у використовуються результати, які мають усередспособі керування силовим агрегатом механічного нені значення, багато факторів не враховуються транспортного засобу, що полягає в тім, що споча(наприклад, знос двигуна й ін.). Крім того, потрібен тку вимірюють поточні параметри роботи двигуна, великий час на проведення вимірів і визначення визначають його режим роботи за параметрами та пускового моменту, тому що визначення пускового реєстрацією поточного значення крутного моменмоменту необхідно проводити без його з'єднання з ту, а потім критерій регулювання порівнюють із валом випробовуваного електродвигуна. Усе це заздалегідь заданим для даного режиму та форзнижує надійність роботи ДВЗ. мують сигнал керування, удосконалено процес Прототипом є технічне рішення, описане в реєстрації поточного значення крутного моменту книзі [«Електроустаткування автомобілів» В.Е. та величини навантаження двигуна. Їх визначають Ютт, М «Транспорт», 1989р., стор. 167], що застодатчиком навантаження силового агрегату, який совуване в сучасній електронній системі автомавиконаний у вигляді датчика крутного моменту. тичного керування двигуном внутрішнього згорянВизначають за безперервним показником потужня. У якій спочатку вимірюють поточні параметри ності, яку витрачає силовий агрегат на подолання роботи двигуна, визначають його режим роботи за сил опору рухові. Віз уалізація сигналу вказаного встановленими параметрами та здійснюють редатчика в реальному проміжку часу здійснюється єстрацією поточного значення крутного моменту, а графічно у вигляді проекції вектора, який підсумопотім критерій регулювання порівнюють із заздавує рушійні сили і сили опору рухові, що діють на легідь заданим для даного режиму і формують транспортний засіб. Що стосується властивостей, сигнал керування. Ця система побудована на базі то корисна модель відрізняється від аналогів та мікропроцесорів. прототипу тим, що спосіб, що заявляється, забезМікропроцесор, крім основних функцій, корекпечує оптимізацію керування (сигнал програмоватує такі показники, як: кількісний і якісний склад, а ний - потужність виміряють датчиком крутного мо 5 23763 6 менту) силовим агрегатом механічного транспортми та реєстрацією поточного значення крутного ного засобу. У аналогів - сигнал непрямий, він помоменту, а потім критерій регулювання порівнюбічний - спочатку виміряють розрядження, а потім ють із заздалегідь заданим для даного режиму і за допомогою комп'ютера розраховують потужформують сигнал керування. Реєстрацію поточноність. Заявляємий спосіб забезпечує одержання го значення крутного моменту і величину навантаінформації з високою точністю вірогідності про ження двигуна 3 визначають датчиком навантаобертовий момент, за рахунок підвищення точносження 2 силового агрегату (виконавчого механізму ті вимірів шляхом зменшення погрішності усеред1) за безперервним показником потужності, яку нення. витрачає силовий агрегат 1 на подолання сил Пошук, здійснений за джерелами науковоопору рухові. Да тчик навантаження силового агретехнічної і патентної інформації, показав, що сукугату 1 виконаний у вигляді датчика крутного момепність істотних ознак технічного рішення, яке заявнту 2. Візуалізація з реальному проміжку часу сигляється, невідома. Таким чином, воно відповідає налу вказаного датчика здійснюється графічно у вимогам новизни. вигляді проекції вектора, який підсумовує р ушійні Корисна модель пояснюється графічними масили і сили опору рухові, що діють на транспорттеріалами. ний засіб. Датчик крутного моменту 2 видає в мікНа кресленні зображена схема системи, відропроцесор 4 електронної системи автоматичного повідно до якої в силовому агрегаті виконавчого керування ДВЗ 3 моментальний показник потужмеханізму 1 установлений датчик 2 крутного моності, що розвиває в даний момент ДВЗ 3. Оскільменту (датчик навантаження силового агрегату). ки сигнал на виході датчика має абсолютну реальВін призначений для реєстрації поточного значенну величину, то регулювальні й експлуатаційнi ня крутного моменту ДВЗ 3. Зазначена система характеристики оптимізовані для даного екземпреалізується на базі мікропроцесора 4. ляра силового агрегату. Спосіб реалізується так, спочатку вимірюють Позитивний результат досягається тим, що поточні параметри роботи двигуна 3, визначають система автоматичного регулювання має замкнуйого режим роботи за встановленими параметратий контур зворотного зв'язку. Комп’ютерна в ерстка Л. Купенко Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for optimization of power unit of mechanical mean of transportation
Автори англійськоюMiakotin Dmytro Оlекsаndrоvусh
Назва патенту російськоюСпособ оптимизации управления силовым агрегатом механического транспортного средства
Автори російськоюМякотин Дмитрий Александрович
МПК / Мітки
МПК: F02D 3/00, G01L 3/00, G01L 3/10
Мітки: агрегатом, механічного, керування, силовим, засобу, транспортного, оптимізації, спосіб
Код посилання
<a href="https://ua.patents.su/3-23763-sposib-optimizaci-keruvannya-silovim-agregatom-mekhanichnogo-transportnogo-zasobu.html" target="_blank" rel="follow" title="База патентів України">Спосіб оптимізації керування силовим агрегатом механічного транспортного засобу</a>
Пристрій для комбінованого керування силовим агрегатом і гальмовою системою (газогальмо степанова)
Номер патенту: 56899
Опубліковано: 15.04.2005
Автор: Степанов Олександр Олександрович
МПК: B60W 10/18, B60W 10/04, B60K 20/04
Мітки: гальмовою, агрегатом, комбінованого, степанова-2, газогальмо, системою, керування, пристрій, силовим
Формула / Реферат:
Спосіб виготовлення сувенірного виробу із заготовки з пластичного матеріалу включає формування виробів методом механічної обробки заготовок тиском. Як заготовки використовують деталі предметів широкого вжитку. На їх поверхні за допомогою механічного пристрою з ручним приводом формують рельєфне зображення. Вибір цього зображення та заготовки, а також приведення пристрою в робочий стан здійснюють споживачі.
Пристрій для комбінованого керування силовим агрегатом і гальмовою системою (система степанова)
Номер патенту: 59252
Опубліковано: 15.03.2005
Автор: Степанов Олександр Олександрович
МПК: B60W 10/04, B60K 20/04, B60W 10/18
Мітки: комбінованого, керування, силовим, гальмовою, система, системою, агрегатом, пристрій, степанова-2
Формула / Реферат:
Пристрій для комбінованого керування силовим агрегатом і гальмовою системою, що містить систему важелів, зв'язаних з педалями газу і гальма, який відрізняється тим, що педалі газу і гальма виконані єдиним блоком, що складається з двох поворотних пружин, коробки розподільника, яка керує верхнім блокіратором, що кріпиться на кронштейні кріплення і блокує верхню частину несучого важеля, і нижнім блокіратором, який кріпиться до несучого важеля і...
Пристрій для комбінованого керування силовим агрегатом і гальмовою системою (система степанова-2)
Номер патенту: 62512
Опубліковано: 15.09.2005
Автор: Степанов Олександр Олександрович
МПК: B60W 10/04, B60W 10/10, B60K 20/04
Мітки: керування, комбінованого, агрегатом, системою, система, силовим, гальмовою, пристрій, степанова-2
Формула / Реферат:
Тістоділитель, який складається з приймальної воронки, закріпленої на шнековій камері в якій розташовано два шнеки, ділильної головки, яка складається з барабана, всередині якого приварено циліндр, а в циліндрі розташовано плаваючий поршень, який складається з двох напівпоршней, вимірювальної кишені, транспортера, що відводить та привідного механізму, який відрізняється тим, що напівпоршні з'єднані між собою за допомогою черв'ячної пари.
Пристрій для комбінованого керування силовим агрегатом і гальмовою системою (газо-гальмо степанова)
Номер патенту: 56899
Опубліковано: 15.05.2003
Автор: Степанов Олександр Олександрович
МПК: B60K 20/04, B60W 10/18, B60W 10/04
Мітки: керування, комбінованого, газо-гальмо, гальмовою, силовим, системою, агрегатом, пристрій, степанова-2
Формула / Реферат:
Спосіб виготовлення сувенірного виробу із заготовки з пластичного матеріалу включає формування виробів методом механічної обробки заготовок тиском. Як заготовки використовують деталі предметів широкого вжитку. На їх поверхні за допомогою механічного пристрою з ручним приводом формують рельєфне зображення. Вибір цього зображення та заготовки, а також приведення пристрою в робочий стан здійснюють споживачі.
Спосіб антиблокувального керування гальмуванням з підвищеною курсовою стійкістю транспортного засобу
Номер патенту: 11673
Опубліковано: 16.01.2006
Автори: Лавріненко Олександр Сергійович, Тимофєєв Віталій Сергійович, Богатиренко Костянтин Іванович
МПК: B60T 8/88
Мітки: курсовою, спосіб, стійкістю, транспортного, керування, гальмуванням, антиблокувального, підвищеною, засобу
Формула / Реферат:
Спосіб антиблокувального керування гальмуванням транспортного засобу, при якому екстремальне автоматичне керування гальмуванням транспортного засобу здійснюють шляхом виміру тангенціальної складової сили тертя між гальмовим диском і гальмовою колодкою при розгальмовуванні колеса в точці фактичного максимуму сили зчеплення коліс з дорожнім покриттям, який відрізняється тим, що визначають умови зчеплення кожного колеса (однієї осі) з дорожнім...
Попередній патент: Вимірювач крутного моменту
Наступний патент: Пристрій для пневматичного транспортування сипких матеріалів
Випадковий патент: Стенд для випробувань пружин на стиск