Спосіб визначення динамічної крутильної жорсткості шпинделя механічної системи з чпк
Номер патенту: 27534
Опубліковано: 12.11.2007
Автори: Донченко Євгеній Іванович, Мироненко Євгеній Васильович, Шишкін Артем Вікторович, Марчук Євген Вячеславович
Формула / Реферат
Спосіб визначення динамічної крутильної жорсткості шпинделя механічної системи з ЧПК з визначенням моменту двигуна за величинами струму і напруги, що подаються на електродвигун, і вимірюванням швидкості робочого ходу ротаційного механізму датчиком кута обертання, встановленим на його валу, який відрізняється тим, що кут скручування шпиндельного вузла визначається як різниця кількості імпульсів датчика кута обертання в моменти появи імпульсу додаткового датчика положення шпинделя.
Текст
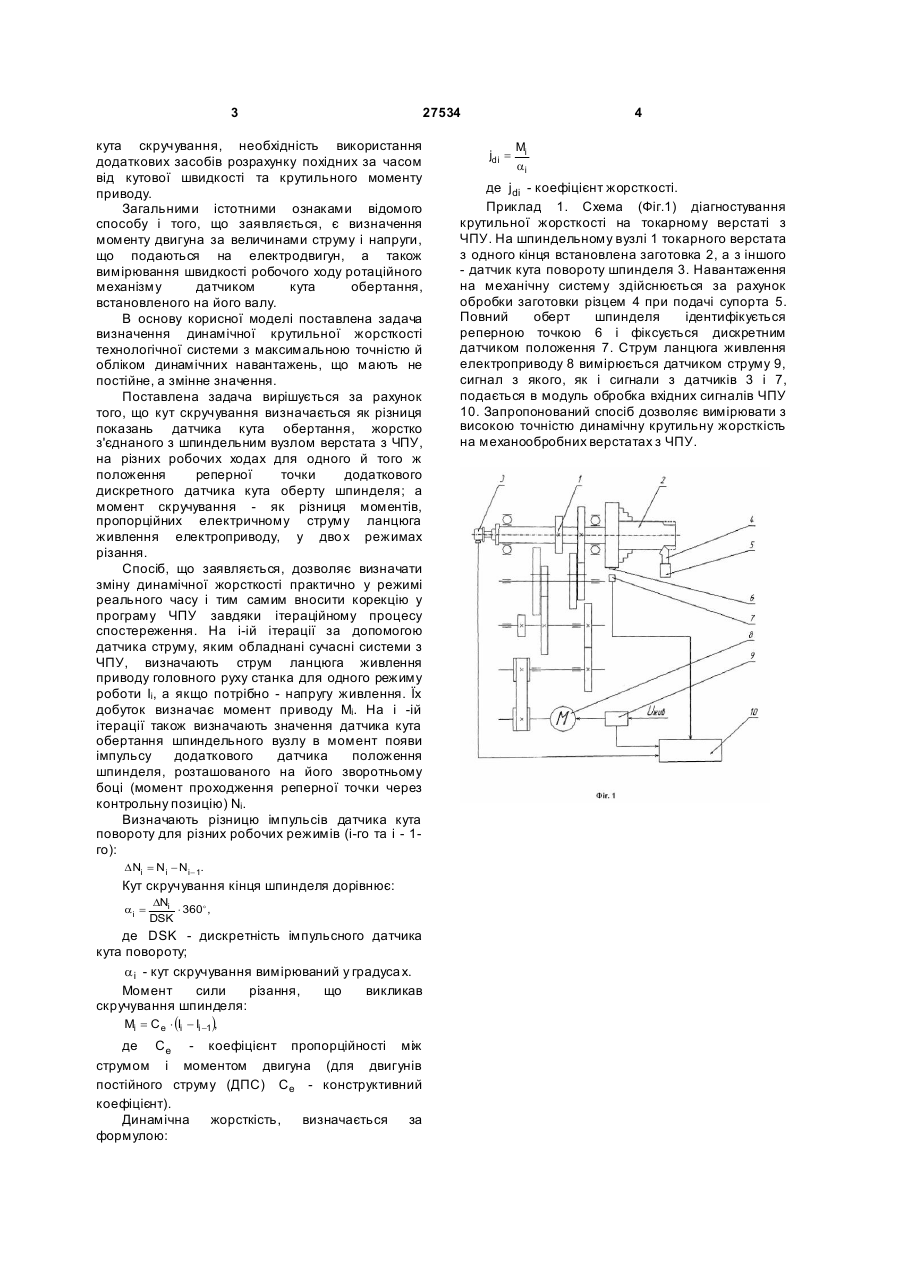
Спосіб визначення динамічної крутильної жорсткості шпинделя механічної системи з ЧПК з визначенням моменту двигуна за величинами струму і напруги, що подаються на електродвигун, і вимірюванням швидкості робочого ходу ротаційного механізму датчиком кута обертання, встановленим на його валу, який відрізняється тим, що кут скручування шпиндельного вузла визначається як різниця кількості імпульсів датчика кута обертання в моменти появи імпульсу додаткового датчика положення шпинделя. (19) (21) u200705107 (22) 10.05.2007 (24) 12.11.2007 (72) МИРОНЕНКО ЄВГЕНІЙ ВАСИЛЬОВИЧ, UA, ДОНЧЕНКО ЄВГЕНІЙ ІВАНОВИЧ, U A, ШИШКІН АРТЕМ ВІКТОРОВИЧ, U A, МАРЧУК ЄВГЕН ВЯЧЕСЛАВОВИЧ, U A (73) ДОНБАСЬКА ДЕРЖАВНА МАШИНОБУДІВНА АКАДЕМІЯ, U A (56) 3 27534 кута скручування, необхідність використання додаткових засобів розрахунку похідних за часом від кутової швидкості та крутильного моменту приводу. Загальними істотними ознаками відомого способу і того, що заявляється, є визначення моменту двигуна за величинами струму і напруги, що подаються на електродвигун, а також вимірювання швидкості робочого ходу ротаційного механізму датчиком кута обертання, встановленого на його валу. В основу корисної моделі поставлена задача визначення динамічної крутильної жорсткості технологічної системи з максимальною точністю й обліком динамічних навантажень, що мають не постійне, а змінне значення. Поставлена задача вирішується за рахунок того, що кут скручування визначається як різниця показань датчика кута обертання, жорстко з'єднаного з шпиндельним вузлом верстата з ЧПУ, на різних робочих ходах для одного й того ж положення реперної точки додаткового дискретного датчика кута оберту шпинделя; а момент скручування - як різниця моментів, пропорційних електричному струму ланцюга живлення електроприводу, у дво х режимах різання. Спосіб, що заявляється, дозволяє визначати зміну динамічної жорсткості практично у режимі реального часу і тим самим вносити корекцію у програму ЧПУ завдяки ітераційному процесу спостереження. На i-iй ітерації за допомогою датчика струму, яким обладнані сучасні системи з ЧПУ, визначають струм ланцюга живлення приводу головного руху станка для одного режиму роботи Ii, а якщо потрібно - напругу живлення. Їх добуток визначає момент приводу Mі. На і -ій ітерації також визначають значення датчика кута обертання шпиндельного вузлу в момент появи імпульсу додаткового датчика положення шпинделя, розташованого на його зворотньому боці (момент проходження реперної точки через контрольну позицію) Nі. Визначають різницю імпульсів датчика кута повороту для різних робочих режимів (і-го та і - 1го): D Ni = Ni - Ni- 1. Кут скручування кінця шпинделя дорівнює: ai = DNi × 360o , DSK де DSK - дискретність імпульсного датчика кута повороту; a i - кут скручування вимірюваний у градуса х. Момент сили різання, що викликав скручування шпинделя: Mi = C e × (Ii - Ii -1), де Ce - коефіцієнт пропорційності між струмом і моментом двигуна (для двигунів постійного струму (ДПС) Ce - конструктивний коефіцієнт). Динамічна жорсткість, визначається за формулою: 4 jdi = Mi ai де jdi - коефіцієнт жорсткості. Приклад 1. Схема (Фіг.1) діагностування крутильної жорсткості на токарному верстаті з ЧПУ. На шпиндельному вузлі 1 токарного верстата з одного кінця встановлена заготовка 2, а з іншого - датчик кута повороту шпинделя 3. Навантаження на механічну систему здійснюється за рахунок обробки заготовки різцем 4 при подачі супорта 5. Повний оберт шпинделя ідентифікується реперною точкою 6 і фіксується дискретним датчиком положення 7. Струм ланцюга живлення електроприводу 8 вимірюється датчиком струму 9, сигнал з якого, як і сигнали з датчиків 3 і 7, подається в модуль обробка вхідних сигналів ЧПУ 10. Запропонований спосіб дозволяє вимірювати з високою точністю динамічну крутильну жорсткість на механообробних верстатах з ЧПУ.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determining the dynamic torsional stiffness of a spindle of a numerical control machine
Автори англійськоюMyronenko Yevhenii Vasyliovych, Donchenko Yevhenii Ivanovych, Shyshkin Artem Viktorovych, Marchuk Yevhen Viacheslavovych
Назва патенту російськоюСпособ определения динамической крутильной жесткости шпинделя станка с числовым программным управлением
Автори російськоюМироненко Евгений Васильевич, Донченко Евгений Иванович, Шишкин Артем Викторович, Марчук Евгений Вячеславович
МПК / Мітки
МПК: G01L 01/22, G01H 11/00
Мітки: визначення, механічної, чпк, жорсткості, динамічної, спосіб, шпинделя, системі, крутильної
Код посилання
<a href="https://ua.patents.su/2-27534-sposib-viznachennya-dinamichno-krutilno-zhorstkosti-shpindelya-mekhanichno-sistemi-z-chpk.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення динамічної крутильної жорсткості шпинделя механічної системи з чпк</a>
Спосіб діагностування динамічної крутильної жорсткості
Номер патенту: 25084
Опубліковано: 25.07.2007
Автори: Донченко Євгеній Іванович, Марчук Євген Вячеславович, Бабін Олег Фавієвич, Сердюк Олександр Олександрович, Мироненко Євгеній Васильович
МПК: G01L 1/00
Мітки: діагностування, жорсткості, динамічної, крутильної, спосіб
Формула / Реферат:
Спосіб діагностування динамічної крутильної жорсткості, що полягає в перетворенні кутових поворотів вала в електричні сигнали за допомогою датчиків його кутового положення, розташованих в двох його перерізах, синхронізації імпульсів від обох датчиків на холостому ходу, після чого вимірюють і порівнюють імпульси, отримані від датчиків при роботі вала під навантаженням, який відрізняється тим, що різниця кількості імпульсів на кінці вихідного...
Установка для визначення коефіцієнта демпфування і динамічної жорсткості при згинальних коливаннях зразка
Номер патенту: 67366
Опубліковано: 15.06.2004
Автори: Когут Іван Степанович, Кравець Сергій Вадимович
МПК: G01N 11/00
Мітки: коефіцієнта, демпфування, жорсткості, коливаннях, визначення, динамічної, установка, зразка, згинальних
Формула / Реферат:
Установка для визначення коефіцієнта демпфування і динамічної жорсткості при згинальних коливаннях зразка, яка містить захват для закріплення досліджуваного зразка і координатний фотоприймач, встановлені на столі електродинамічного вібратора, діафрагму, закріплену на вільному торці зразка, встановлені поза столом координатний фотоприймач і джерела світла, центральні промені яких перпендикулярні до вертикальних площин входів координатних...
Спосіб визначення технічного стану устаткування крутильної системи лінії головного приводу прокатної кліті
Номер патенту: 70137
Опубліковано: 15.09.2004
Автори: Мацко Сергій Володимирович, Борщов Олексій Вікторович, Юнаков Олександр Михайлович, Путнокі Олександр Юліусович, Будаква Сергій Анатолійович, Вереньов Валентин Володимирович, Далічук Анатолій Пантелійович
МПК: G01M 7/02
Мітки: головного, спосіб, крутильної, прокатної, технічного, кліті, визначення, стану, лінії, приводу, устаткування, системі
Формула / Реферат:
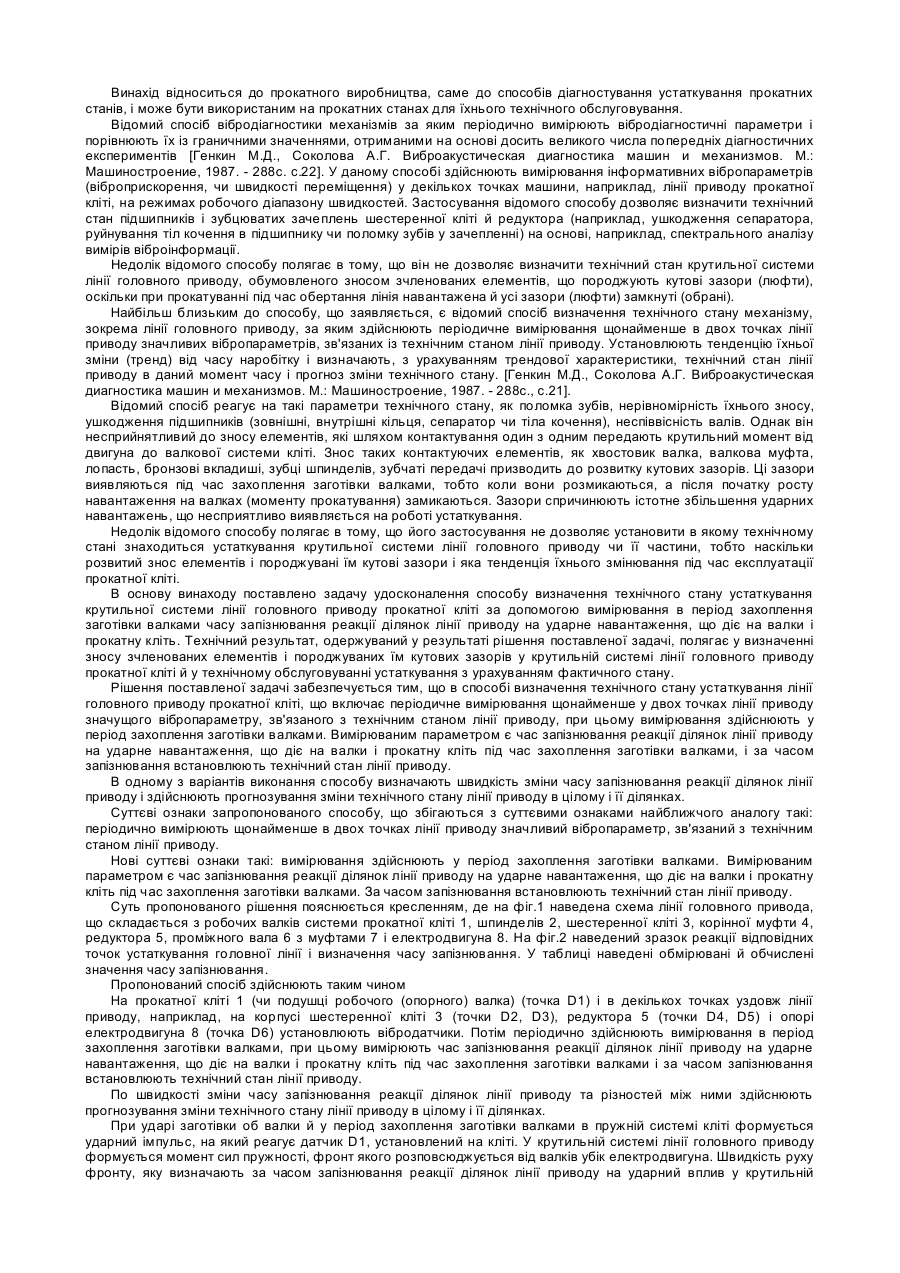
Спосіб визначення технічного стану устаткування крутильної системи лінії головного приводу прокатної кліті, за яким періодично вимірюють, щонайменше у двох точках лінії приводу, значущий вібропараметр, зв'язаний з технічним станом лінії приводу, який відрізняється тим, що вимірювання здійснюють у період захоплення заготівки валками, при цьому визначають час запізнювання реакції ділянок лінії приводу на ударне навантаження, що діє на валки і...
Установка для визначення коефіцієнта демпфування і динамічної жорсткості при згинних коливаннях зразка

Номер патенту: 34135
Опубліковано: 15.02.2001
Автори: Микита Андрій Юліанович, Когут Іван Степанович
МПК: G01N 11/00
Мітки: коефіцієнта, динамічної, установка, зразка, коливаннях, згинних, жорсткості, демпфування, визначення
Текст:
...координатних фотоприймачів більші за розмах коливань стола 7 і діафрагми 3, відповідно. Діаметр концентричного кільцевого сліду на діафрагмі 3 такий, що при коливаннях отвір діафрагми не виходить за його межі. Розміри слідів забезпечуються відповідними довжинами світлових пучків і відстанню між діафрагмою 3 і фотоп риймачем 4. Як джерела світла, застосовані лазери газові, атомарні (гелій-неонові), одномодові. Установка працює в такий спосіб....
Спосіб визначення параметрів тримасової механічної коливальної системи вібраційної машини з електромагнітним приводом
Номер патенту: 25771
Опубліковано: 27.08.2007
Автор: Ланець Олексій Степанович
Мітки: машини, приводом, електромагнітним, системі, механічної, тримасової, вібраційної, спосіб, визначення, коливальної, параметрів
Формула / Реферат:
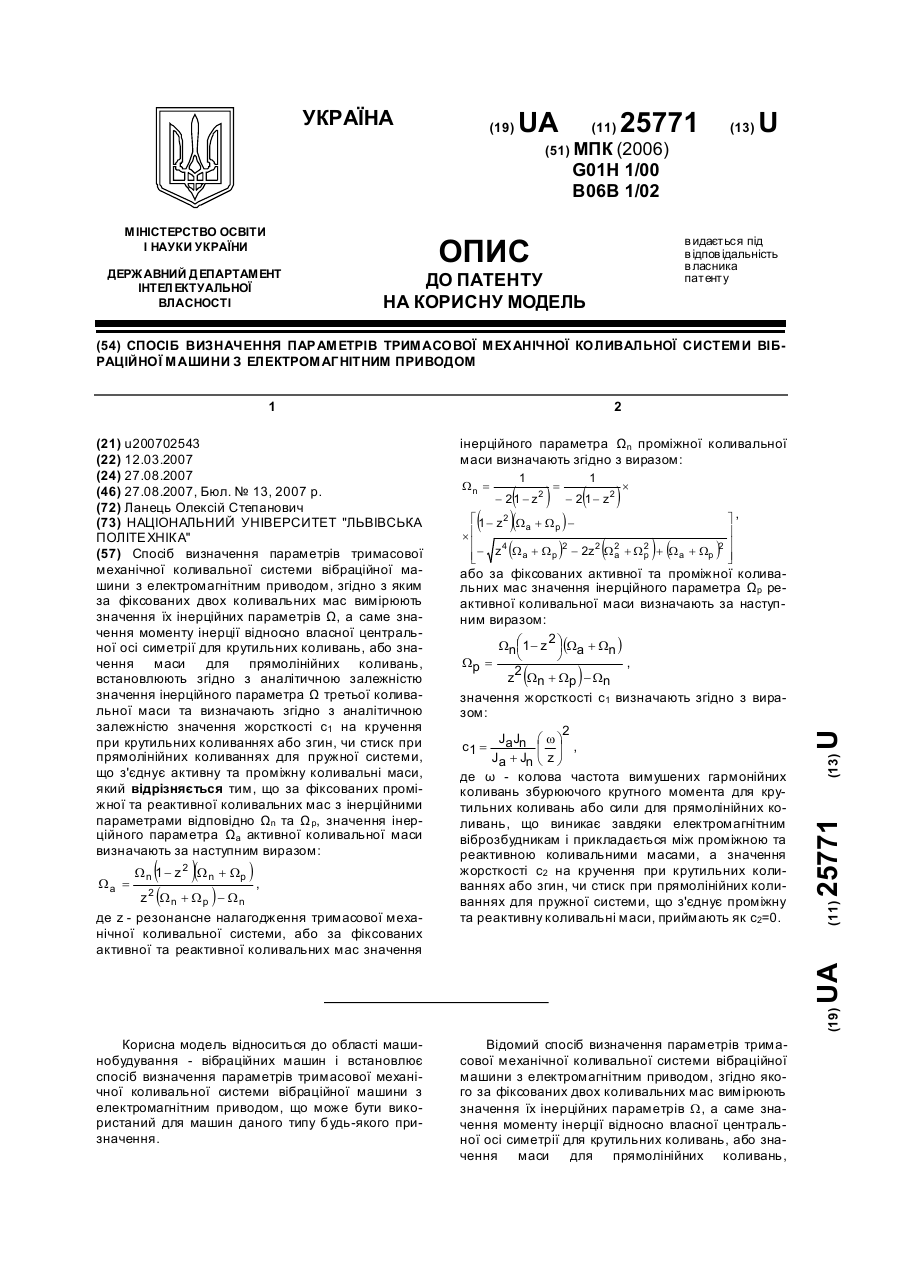
Спосіб визначення параметрів тримасової механічної коливальної системи вібраційної машини з електромагнітним приводом, згідно з яким за фіксованих двох коливальних мас вимірюють значення їх інерційних параметрів Ω, а саме значення моменту інерції відносно власної центральної осі симетрії для крутильних коливань, або значення маси для прямолінійних коливань, встановлюють згідно з аналітичною залежністю значення інерційного параметра...
Попередній патент: Барабан для багатошарового навивання гнучкого елемента
Наступний патент: Спосіб виготовлення виробів типу панелей та вилок з важкодеформівних сплавів
Випадковий патент: Гальмівна камера із пружинним енергоакумулятором