Спосіб діагностування динамічної крутильної жорсткості
Номер патенту: 25084
Опубліковано: 25.07.2007
Автори: Бабін Олег Фавієвич, Марчук Євген Вячеславович, Сердюк Олександр Олександрович, Донченко Євгеній Іванович, Мироненко Євгеній Васильович
Формула / Реферат
Спосіб діагностування динамічної крутильної жорсткості, що полягає в перетворенні кутових поворотів вала в електричні сигнали за допомогою датчиків його кутового положення, розташованих в двох його перерізах, синхронізації імпульсів від обох датчиків на холостому ходу, після чого вимірюють і порівнюють імпульси, отримані від датчиків при роботі вала під навантаженням, який відрізняється тим, що різниця кількості імпульсів на кінці вихідного вала верстата - шпинделі, реєструється імпульсним датчиком кута повороту під час виходу інструмента з процесу різання, зафіксованого силовим датчиком, що визначає відповідний крутильний момент, або датчиком положення - при розрахунковому методі визначення обертального моменту.
Текст
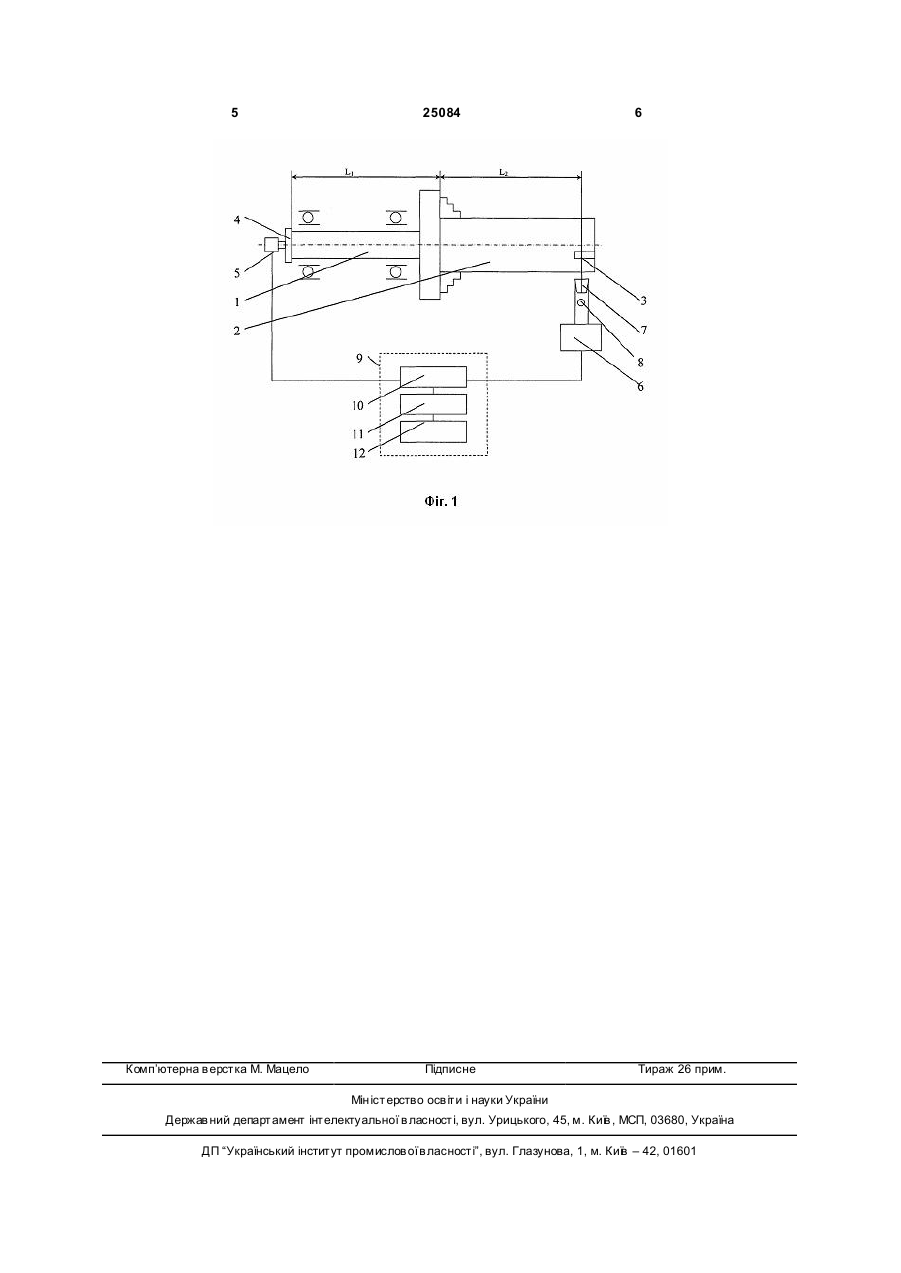
Спосіб діагностування динамічної крутильної жорсткості, що полягає в перетворенні кутових поворотів вала в електричні сигнали за допомогою 3 25084 Поставлена задача вирішується тим, що різниця кількості імпульсів на кінці вихідного валу верстата - шпинделі реєструється імпульсним датчиком кута повороту під час виходу інстр ументу з процесу різання, зафіксованого силовим датчиком, що визначає відповідний крутильний момент, або датчиком положення - при розрахунковому методі визначення обертаючого моменту. До привідного кінця вихідного вала верстата шпинделя для визначення кута скручування через муфту приєднують імпульсний датчик кута повороту з високою здатністю, який може генерувати імпульс початку. При точному визначенні моменту роблять установку силового датчика на технологічну систему. При визначенні моменту розрахунковим способом на вузлі технологічної системи, що робить рух подачі, встановлюється датчик для реєстрації положення (віброприскорення, індукційний, оптичний і ін.). Датчики визначення моменту, віброприскорення і кута повороту підключають до системи обробки і реєстрації даних. На першому етапі виконують процес врізання і, при виникненні повного контакту між інструментом і заготівкою, виключають подачу і визначають кількість імпульсів N0 від імпульсу початку до останнього імпульсу, що визначається датчиком повороту до часу виходу інструмента з контакту з деталлю, і знаходять відповідно силу Р0 (М0) та діаметр D0. Вихід інструмента з контакту визначається силовими датчиками (при визначенні сили розрахунковим шляхом, вихід інструмента визначають по датчиках віброприскорень, оптичному, індукційному й ін.). На другому етапі виконують процес врізання і при виникненні контакту між інструментом і заготівкою визначають кількість імпульсів Ni від імпульсу початку до останнього імпульсу , що визначається датчиком повороту до часу виходу інструмента з контакту з деталлю, і знаходять відповідно силу Рi (Мi) та діаметр Di. При використанні датчика моменту визначення діаметрів не потрібно. Визначаємо різницю імпульсів датчика кута повороту: DNi = Ni - N0 Кут скручування кінця шпинделя дорівнює: DNi ai = × 360o DSK де DSK - дискретність імпульсного датчика кута повороту; a i - кут скручування вимірюваний у градуса х. 4 Момент сили різання, що викликало кут скручування шпинделя при вимірі динамометром: D D Mi = Pi i - P0 0 2 2 (якщо головний рух обертання інструменту або обробка прохідним різцем Di = D0). Динамічна жорсткість, визначається за формулою: M j¶i = i ai де j¶i коефіцієнт динамічної крутильної жорсткості. Приклад 1. Схема діагностування крутильної жорсткості на токарному верстаті, якщо сила різання розраховується (див. Фіг.1). На шпиндельному вузлі 1 токарного верстата 1А64 з одного кінця встановлена деталь 2 з попередньо обробленим пазом 3, необхідним для виникнення процесу врізання при обертанні, а на іншому - через муфту 4 приєднаний імпульсний датчик кута повороту 5 моделі ROD 230-9000 фірми Heidenhain. На супорті 6 встановлено прорізний різець 7 з датчиком віброприскорень 8. Імпульсний датчик кута повороту 5 і датчик віброприскорень 8 приєднані до системи обробки і реєстрації даних 9, яка складається з послідовно з'єднаних частин: розв'язуючого підсилювача 10, аналого-цифрового перетворювача 11 (мод. 1-card Е 14-440), а також персональної ЕОМ 12. Початкові дані L1=1,2м; L2=2м; Рi=10000Н (розрахункова величина), Di=207мм, D = Pi i 1035H * м. Mi = 2 У результаті проведення випробувань: Ni=954; N 0=919; DNi= Ni-N0=954-919=35; Кут скручування кінця шпинделя: DNi 35 ai = × 360o = × 360o = 1 .4 , DSK 9000 де DSK=9000; Динамічна жорсткість, визначається по формулі: M j¶i = i = 739,286H * м / град. ai Наведений приклад підтверджує досягнення технічного результату при проведенні заявленого способу. 5 Комп’ютерна в ерстка М. Мацело 25084 6 Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determining the dynamic tensional stiffness of a shaft
Автори англійськоюMyronenko Yevhenii Vasyliovych, Serdiuk Oleksandr Oleksandrovych, Babin Oleh Faviyevych, Marchuk Yevhen Viacheslavovych, Donchenko Yevhenii Ivanovych
Назва патенту російськоюСпособ определения динамической жесткости вала при кручении
Автори російськоюМироненко Евгений Васильевич, Сердюк Александр Александрович, Бабин Олег Фавиевич, Марчук Евгений Вячеславович, Донченко Евгений Иванович
МПК / Мітки
МПК: G01L 1/00
Мітки: спосіб, крутильної, динамічної, діагностування, жорсткості
Код посилання
<a href="https://ua.patents.su/3-25084-sposib-diagnostuvannya-dinamichno-krutilno-zhorstkosti.html" target="_blank" rel="follow" title="База патентів України">Спосіб діагностування динамічної крутильної жорсткості</a>
Установка для визначення коефіцієнта демпфування і динамічної жорсткості при згинальних коливаннях зразка
Номер патенту: 67366
Опубліковано: 15.06.2004
Автори: Когут Іван Степанович, Кравець Сергій Вадимович
МПК: G01N 11/00
Мітки: коливаннях, жорсткості, згинальних, установка, демпфування, зразка, визначення, динамічної, коефіцієнта
Формула / Реферат:
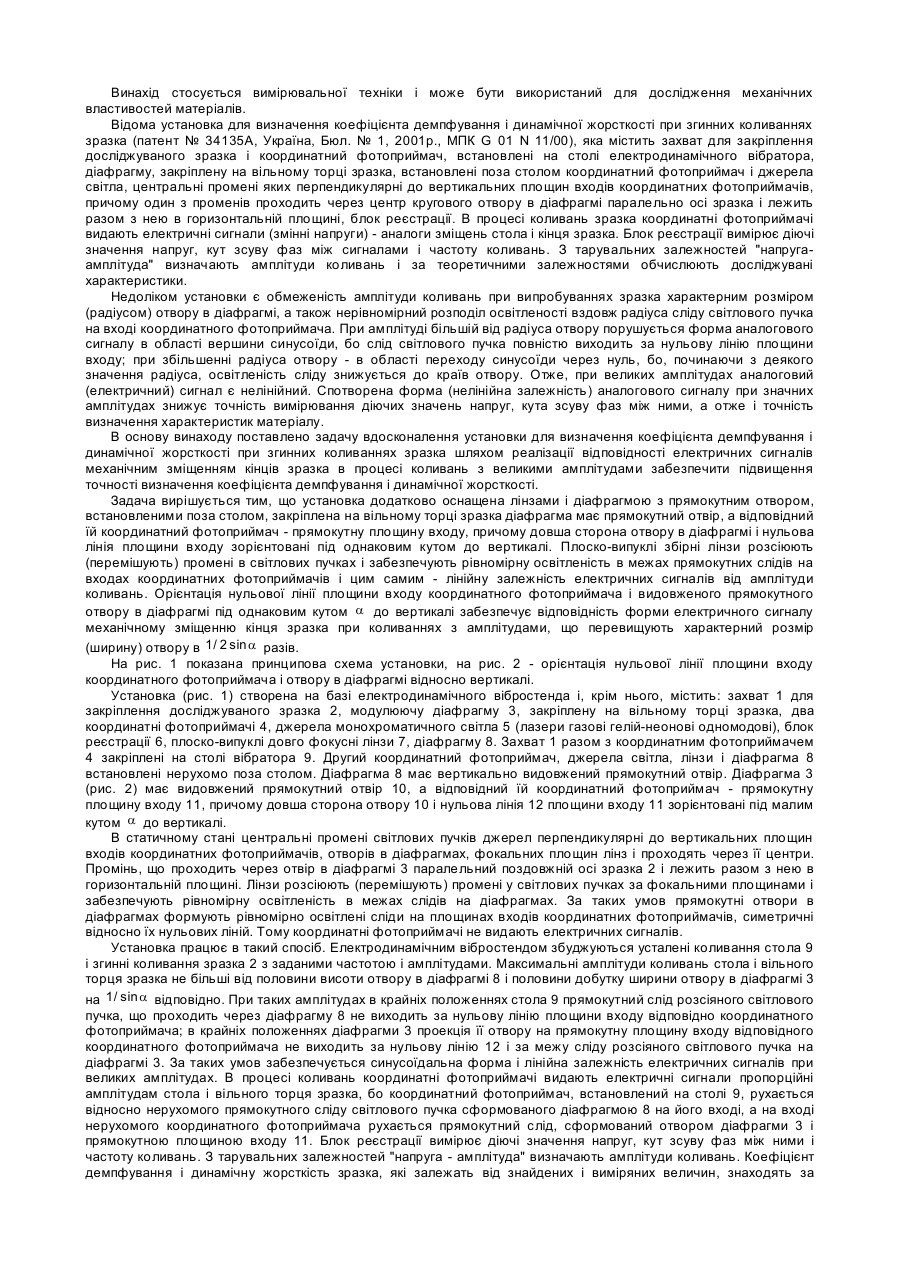
Установка для визначення коефіцієнта демпфування і динамічної жорсткості при згинальних коливаннях зразка, яка містить захват для закріплення досліджуваного зразка і координатний фотоприймач, встановлені на столі електродинамічного вібратора, діафрагму, закріплену на вільному торці зразка, встановлені поза столом координатний фотоприймач і джерела світла, центральні промені яких перпендикулярні до вертикальних площин входів координатних...
Установка для визначення коефіцієнта демпфування і динамічної жорсткості при згинних коливаннях зразка

Номер патенту: 34135
Опубліковано: 15.02.2001
Автори: Когут Іван Степанович, Микита Андрій Юліанович
МПК: G01N 11/00
Мітки: установка, коливаннях, визначення, демпфування, згинних, коефіцієнта, жорсткості, динамічної, зразка
Текст:
...координатних фотоприймачів більші за розмах коливань стола 7 і діафрагми 3, відповідно. Діаметр концентричного кільцевого сліду на діафрагмі 3 такий, що при коливаннях отвір діафрагми не виходить за його межі. Розміри слідів забезпечуються відповідними довжинами світлових пучків і відстанню між діафрагмою 3 і фотоп риймачем 4. Як джерела світла, застосовані лазери газові, атомарні (гелій-неонові), одномодові. Установка працює в такий спосіб....
Спосіб діагностування двигуна внутрішнього згоряння
Номер патенту: 38716
Опубліковано: 15.05.2001
Автор: Дзеціна Олег Петрович
МПК: G01M 15/00, G01L 15/00, G01H 3/00
Мітки: двигуна, внутрішнього, діагностування, спосіб, згоряння
Формула / Реферат:
(21) 2000095121(54) (57)Дата прийняттярішення06 лютого 2001 р.Спосіб діагностування двигуна внутрішнього згоряння за величиною середнього індикаторного тиску шляхом експериментального одержання залежності тиску газів від кута повороту колінчатого вала і визначення середнього індикаторного тиску по отриманій залежності, який відрізняється тим, що величину Рі визначають без виміру тиску в циліндрі, для чого...
Спосіб діагностування моменту знаходження поршнів у мертвих точках у двигуні внутрішнього згоряння з вільнорухомими поршнями, зв’язаними рейково-шестеренчастим синхронізуючим механізмом
Номер патенту: 3284
Опубліковано: 15.11.2004
Автори: Бабкін Юрій Єгорович, Лук'янов Олександр Олексійович, Ягудін Семен Зінов'євич, Заславський Юхим Григорович, Тернопол Володимир Петрович, Золотов Юрій Миколайович, Борисенко Анатолій Миколайович
МПК: G01M 15/00
Мітки: згоряння, поршнів, діагностування, вільнорухомими, внутрішнього, знаходження, синхронізуючим, механізмом, спосіб, моменту, точках, поршнями, зв'язаними, рейково-шестеренчастим, мертвих, двигуні
Формула / Реферат:
Спосіб діагностування моменту знаходження поршнів у мертвих точках у двигуні внутрішнього згоряння з вільнорухомими поршнями, зв'язаними рейково-шестеренчастим синхронізуючим механізмом, який відрізняється тим, що в тілі шестірні синхронізуючого механізму виконують отвір, центр якого розташований у секторі, обмеженому двома площинами, що проходять через вісь обертання шестірні і середини вершини і прилягаючої западини зуба, вимірюють кут...
Спосіб побудови моделі нелінійної динамічної системи
Номер патенту: 41143
Опубліковано: 15.08.2001
Автори: Нащанський Олександр Анатолійович, Гуртов Олександр Олександрович, Зубко Олег Олександрович, Горєлов Олександр Сергійович, Зєліков Всеволод Ілліч, Серков Олександр Анатолійович
МПК: G05B 23/02
Мітки: системі, нелінійної, спосіб, побудови, моделі, динамічної
Формула / Реферат:
Спосіб побудови моделі нелінійної динамічної системи, що включає до свого складу подачу тестуючих імпульсів, визначення реакції на тестуючий імпульс, який відрізняється тим, що додаткове тестування відбувається пакетом імпульсів, кількість яких у пакеті та часова відстань між ними змінюєтся під час тестування.
Попередній патент: Пристрій для контролю ступеня безпеки закупорювання скляної тари
Наступний патент: Спосіб комбінованого регулювання потужності конденсаторних установок
Випадковий патент: 4-(1,9-діоксо-3,9-дигідро-тіазоло[4,3-b]хіназолін-3-ілазо)-n-тіазол-2-іл-бензенсульфаніламід, що проявляє антиоксидантну дію