Електропривід з розривним фазовекторним керуванням
Номер патенту: 27886
Опубліковано: 16.10.2000
Автори: Кліменко Юрій Михайлович, Садовой Олександр Валентинович
Текст
Электропривод с разрывным фазовекторным управлением, содержащий асинхронный электродвигатель с датчиком частоты вращения, подключенный через блок датчиков фазных токов к выходам преобразователя частоты, регулятор частоты вращения, вход которого соединен с вы ходом датчика частоты вращения, а выход - с первым входом регулятора момента, регулятор модуля потокосцепления, первый преобразователь координат, управляющие входы которого подключены к выходам регуляторов момента и модуля потокосцепления ротора, второй преобразователь координат, выходом соединенный с первым многофазным входом блока сумматоров, второй многофазный вход которого и его вы ход связаны с выходом блока датчиков фазных токов и с входом блока регуляторов фазных токов, блок вычисления составляющих тока статора, подключенный входами к выходам блока датчиков фазных токов, блок вычисления составляющих потокосцепления ротора, соединенный двухфазным входом с выходом блока вычисления составляющи х тока статора, блок вычисления момента, соединенный двухфазными входами с выходами блоков вычисления составляющи х тока статора и потокосцепления ротора, а выходом - со вторым входом регулятора момента, векторный анализатор, подключенный двухфазным входом к вы ходу блока вычисления составляющих потокосцепления ротора, входом модуля потокосцепления ко входу регулятора модуля потокосцепления, а двухфазным выходом опорных гармоничных функций - к соответствующему двухфазному входу первого преобразователя координат, блок компенсации, входы которого подключены к выходу датчика частоты вращения и к двухфазному выходу блока вычисления потокосцепления ротора , отли чающийся тем, что он дополнительно снабжен динамической моделью токового контура, первый, второй и третий двухфазные входы которой соединены с двухфазными выходами соответственно первого преобразователя координат, блока вычисления составляющих потокосцепления ротора и блока компенсации, а ее двухфазный выход подключен к двухфазному входу второго преобразователя координат, вы ход блока регуляторов фазных токов соединен с управляющим входом преобразователя часто ты, двухфазный вы хо д блока компенсации подключен к дополнительному двухфазному входу блока вычисления составляющих потокосцепления ротора, причем блок вычисления составляющих потокосцепления ротора выполнен в виде структуры, реализующей алгоритм: Изобретение относится к электротехнике, а именно, к системам фазовекторного управления асинхронными двигателями АД;с ориентацией по полю и преднамеренно организованными многомерными скользящими режимами. Использование его в приводны х модуля х металлообрабаты вэю ще го обор удо вания, гибки х автоматизированных линий и систем позволяет получить высокую динамическую точность отработки управляющих воздействий и низкую чувстви тельность к параметрическим и координатным возмущениям к , ][и« U, О со 00 00 где к.= и*ИМ**-і» i4« UfcfrH-L=) постоянные коэффициенты,выражаемые через параметры АД; Umi -постоянные по амплитуде напряжения; л Isap'. Is(?,,5 -измеренные и вычисленные составляющие тока ста тора; Uf, U2 -сигналы с вы хо да блока компенсации. см 27886 И з ве стн о ус тр о й ст во для уп р а вле н и я АД[1 Содержащее АД, преобразователь энергии на ключевых элементах, датчик текущи х соста вляющих потокосцеплений ротора, датчики истинных значений регулируемых координат, формирователи сигналов ошибок и их производных, координатный преобразователь, регуляторы с нелинейными характеристиками типа "гистерезис" преобразователь числа фаз и формирователь релейных сигналов. Недостатками устройства являются: низкая точность формирования и значительные пульсации электромагнитного момента АД, низкие динамическая точность и энергетические показатели, отсутствие ограничения внутренних координат - фазных токов статора. Известен частотно-управляемый электропривод [2] со встроенными в АД датчиками потокосцеплений и с внутренним контуром регулирования фазных токов статора. Основные недостатки электропривода - низкая точность формирования момента, обусловленная коссвенным его регулированием, что наряду с введенными ограничениями на скорости изменения задающих воздействий снижает динамическую точность системы. Наиболее близким по технической сущности и достигаемому эффекту я вляется электропривод [3] содержащий АД с датчиком частоты вращения, подключенный через блок датчиков фазных токов к выходам преобразователя частоты, регулятор частоты вра щения, вход которого соединен с выходом датчика частоты вра щения, а выхо д - с первым входом регулятора момента, регулятор модуля потокосцепления, преобразователь координат, управляющие входы которого подключены к выходам регуляторов момента и модуля потокосцепления ротора, выход преобразователя координат соединен с первым многофазным входом блока сумматоров в котором второй многофазный вход и его выход связаны с выходом блока датчиков фазных токов и со входом блока регуляторов фазны х токов, блок вычисления составляющи х тока статора, подключенный входами к выходам блока датчиков фазных токов, блок вычисления момента соединенный двухфазными входами с выходами блоков вычисления составляющих тока статора и потокосцепления ротора, а выходом - со вторым входом регулятора момента, векторный анализатор, подключенный двухфазным входом к выходу блока вычисления составляющих потокосцепления ротора, выходом модуля потокосцепления - ко еходу регулятора модуля потокосцепления, а двухфазным выходом опорных гармонических функций - к соответствующему двухфазному входу преобразователя координат, блок компенсации, входы которого подключены к выходу датчика частоты вращения и к двухфазному выходу блока вычисления потокосцепления ротора. Недостатками указанного устройства является низкая точность формирования момента, обусловленная высокой чувствительностью системы управления к параметрической нестационарности обьекта управления и координатным возмущениям. Применяемые в системе пропорциональноинтегральные регуляторы частоты вращения, момента и модуля потокосцепления ротора не обеспечивают компенсацию внутренних перекрестных связей АД, автономность контуров регулирования и оптимальные по качеству переходные процессы при отклонениях параметров обьекта управления от расчетных. Обеспечение низкой чувстви тельности к параметрическим и координатным возмущениям может быть достигнуто применением в системе релейных регуляторов, работающих в скользящих режимах. Однако, в сиетемах с подчиненным принципом управления, при работе в скользящем режиме регуляторов внешнего контура они подчиняют себе работу регуляторов вн утреннего контура формирования разных токов двигателя. Частота переключения регуляторов вн утренних контуров при этом снижается и становится равной частоте переключения регуляторов внешних контуров, что приводит к значительному увеличению пульсаций элек-тромагнитного момента, снижению точности отработки задающих воздействий, увеличению аккустического шума, потерь и нагрева. Качество формирования момента, кроме того, определяется динамической точностью восстановления ориентирующего вектора состояния. Используемые в прототипе датчики магнитного потока требуют переделки серийного АД, а в зоне близких к нулевым и нулевых частот вра щения измерение ортогональных составляющих магнитного потока осуществляют со значительными погрешностями. Использование специальных измерительных обмоток приводит к необходимости интегрирования полученных сигналов и в указанной зоне требует адаптации постоянных времени интеграторов и снижения неидеальности интегрирования сигналов низкого уровня. При выполнении датчиков на элементах Холла, наряду с нелинейным характером ЭДС Холла от частоты переменного магнитного поля и температурной нестабильности, сигналы на их выходах содержат помехи, спектр которых определяют высокочастотные составляющие зубцовы х гармоник, низкочастотные составляющие, вызванные неидеальностью распределения обмоток в пазах АД, и широкополосные сигналы, обусловленные несинусоидальностью напряжений питания АД и коммутацией вентилей инвертора. Эти недостатки снижают качество формирования момента при нулевых и низких частота х вра щения и ограничивают снизу диапазон регулирования частоты вращения, применение известных устройств вычисления координат n o A.C . С С С Р №1 0 3 9 01 1 , 1 24 6 3 17 ,1 2 83 9 29 , 1398081,1399882, 1403323 , 1422362 ,157585 , I577053, I658353, НО2Р 5/402 1983-91 г.г. не позволяет получить требуемую для реализации фазовекторных систем высокую динамическую точность восстановления ориентирующе го вектора, т.к. для его вычисления используются не мгновенные, а средние значения частоты вращения. В основу изобретения поставлена задача создания электропривода с разрывным фазовекторным управлением, в котором введение динами ческой модели токового контура с соответствующей стр уктурой и связями, выполнение блока вычисления составляющи х потокосцеплений ротора в виде устройства, реализующе го предлагаемый алгоритм, обеспечивает снижение пульсаций электромагнитного момениа за счет повышения динамической точности восстановления ориенти
ДивитисяДодаткова інформація
Автори англійськоюSadovoi Oleksandr Valentynovych
Автори російськоюСадовой Александр Валентинович
МПК / Мітки
МПК: H02P 27/04
Мітки: електропривід, розривним, керуванням, фазовекторним
Код посилання
<a href="https://ua.patents.su/2-27886-elektroprivid-z-rozrivnim-fazovektornim-keruvannyam.html" target="_blank" rel="follow" title="База патентів України">Електропривід з розривним фазовекторним керуванням</a>
Електропривід з частотно-струмовим керуванням
Номер патенту: 2945
Опубліковано: 26.12.1994
Автори: Ярославцев Михайло Іванович, Лукашенко Андрій Германович
МПК: H02P 27/04
Мітки: керуванням, електропривід, частотно-струмовим
Формула / Реферат:
Электропривод с частотно-токовым управлением, содержащий синхронный двигатель, фазовращатель, ротор которого механически соединен с ротором двигателя, цепь возбуждения фазовращателя подключена к выходу источника синусоидальных напряжений, последовательно соединенные фазовый детектор с управляющим первым и вторым опорными входами и регулируемый источник тока, выходы которого подключены к фазным обмоткам двигателя, формирователь коротких...
Елекропривод з частотно-струмовим керуванням
Номер патенту: 3185
Опубліковано: 26.12.1994
Автор: Ярославцев Михайло Іванович
МПК: H02P 27/04
Мітки: частотно-струмовим, керуванням, елекропривод
Формула / Реферат:
Электропривод с частотно-токовым управлением, содержащий синхронный двигатель, датчик положения, ротор которого механически соединен с ротором двигателя, а цепь возбуждения подключена к первому выходу источника опорных сигналов, блок выборки-хранения с опорным и управляющими входами, подключенный выходами через регулируемый источник тока к фазным обмоткам двигателя, блок умножения, подключенный первым входом к второму выходу источника опорных...
Спосіб управління асинхронним електроприводом
Номер патенту: 20489
Опубліковано: 15.07.1997
Автор: Аркадьєв Віктор Юрьєвич
МПК: H02P 27/04
Мітки: асинхронним, спосіб, електроприводом, управління
Формула / Реферат:
Способ управления асинхронным электроприводом, при котором формируют мгновенные симметричные фазные напряжения на обмотках статора асинхронного двигателя с амплитудой, частотой и фазой, определяемыми по измеренной скорости и двум входным воздействиям, одно из которых постоянно и соответствует требуемой амплитуде потокосцепления ротора, а другое соответствует моменту, отличающийся тем, что устанавливают граничное значение частоты по...
Частотно-регульований електропривід
Номер патенту: 8810
Опубліковано: 30.09.1996
Автори: Волков Олександр Васильович, Андрієнко Петро Дмитрович
МПК: H02P 27/04
Мітки: частотно-регульований, електропривід
Формула / Реферат:
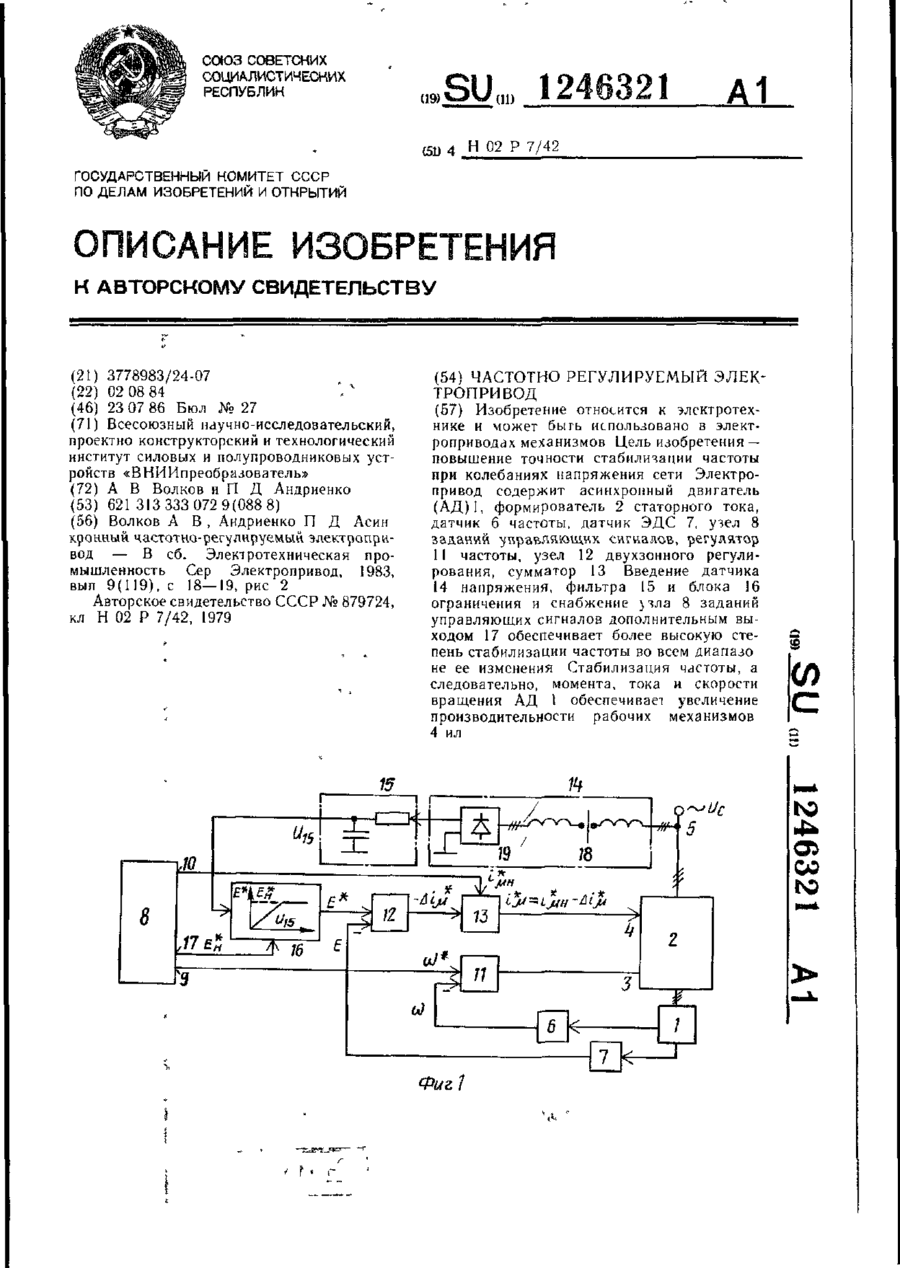
Частотно-регулируемый электропривод, содержащий асинхронный двигатель, обмотки которого подключены к выходам формирователя статорного тока, снабженного первым и вторым управляющими входами и клеммами для подключения питающей сети, датчик частоты и датчик ЭДС, связанные с асинхронным двигателем, узел заданий управляющих сигналов с первым и вторым выходами, регулятор частоты, подключенный управляющим входом к первому выходу узла заданий...
Вентільний електропривід

Номер патенту: 3656
Опубліковано: 27.12.1994
Автори: Фель Олександр Михайлович, Процерова Наталія Олександрівна, Смотров Євген Олександрович, Ніколенко Анатолій Миколайович
МПК: H02K 29/06
Мітки: вентильний, електропривід
Формула / Реферат:
1. Вентильный электропривод, содержащий синхронный электродвигатель с датчиком положения ротора на валу, якорная обмотка которого подключена к выходам трехфазного транзисторного мостового преобразователя частоты с неуправляемым выпрямителем обратного тока, составленным из диодов анодной и катодной групп, выходом подключенным к источнику питания, блок управления с контролирующими регулирующим входами, информационные входы которого...
Попередній патент: Засіб для інгібування небажаного відкладання фіброїдних тканин на стінці матки
Наступний патент: Тривальцьовий комбікормовий агрегат
Випадковий патент: Пристрій для одержання газо-повітряної паливної суміші