Слідкуючий перетворювач кута повороту вала в код

Формула / Реферат
Слідкуючий перетворювач кута повороту вала в код, що містить синусно-косинусний датчик кута, виходи якого з'єднані з першими входами блоків множення, виходи яких підключені до входів блока віднімання, вихід якого підключений до входу компаратора і входу блока перетворення амплітуди напруги у послідовний код, вихід якого з'єднаний з лічильним входом реверсивного лічильника, який через блок синусно-косинусного перетворення коду підключений до других входів блоків множення, другий вхід компаратора з'єднаний зі спільною шиною, а його вихід підключений до одного із входів реверсивного лічильника, який відрізняється тим, що в нього введено блок формування імпульсу запису, вхід якого підключений до напруги живлення, а вихід з'єднаний із входом дозволу передустановлення реверсивного лічильника.
Текст
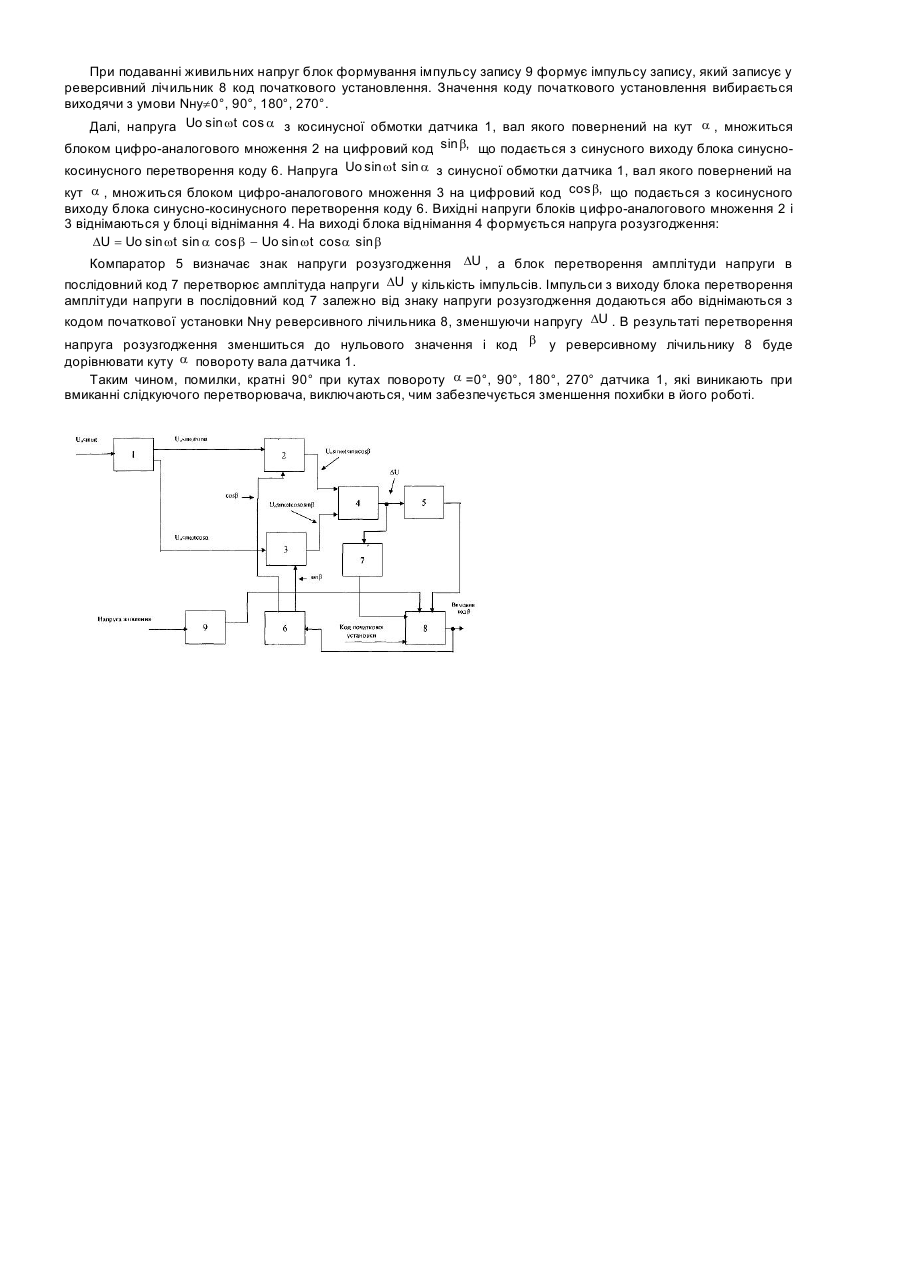
Корисна модель належить до галузі автоматики та обчислювальної техніки і може бути використана для зв'язку аналогових джерел інформації з цифровим обчислювальним пристроєм. Відомим є перетворювач кута повороту вала в код (А. С. СРСР №590795, кл. G08C9/04, 1978), що містить синусно-косинусний датчик кута, синусна і косинусна обмотки якого підключені до одних із входів першого і другого помножувальних пристроїв відповідно, віднімач, компаратор, вихід якого через пристрій керування підключений до входу регістра, функціональний перетворювач коду, вхід якого з'єднаний з одним з виходів регістра, а косинусний і синусний виходи функціонального перетворювача коду з'єднані з другими входами першого і другого помножувальних пристроїв відповідно, виходи яких підключені до входів віднімача, вихід якого з'єднаний з одним із входів компаратора, інший вхід якого з'єднаний зі спільною шиною. Суттєвими ознаками аналога та винаходу, що збігаються, є: - синусно-косинусний датчик кута, - віднімач, компаратор, функціональний перетворювач коду, помножувальні пристрої, які виконують функцію перетворення кута повороту вала в код. Недоліком аналога є велика похибка, а саме помилка, що дорівнює 90°, 180°, 270° і виникає в момент вмикання перетворювача, якщо вал датчика кута у даний момент нерухомий і повернений на один з кутів, дорівнюючих 0°, 90°, 180°, 270°. Найбільш близьким за технічною сутністю до пропонованого (перетворювач кута повороту вала в код (А. С. СРСР №691909, кл. G08C9/00, 1979), що містить синусно-косинусний датчик кута, виходи якого з'єднані з першими входами блоків множення, виходи яких підключені до виходів блока віднімання, вихід якого підключений до входу компаратора і входу блока перетворення амплітуди у послідовний код, вихід якого з'єднаний з лічильним входом реверсивного лічильника, який через блок перетворення коду підключений до других входів блоків множення, другий вхід компаратора з’єднаний зі спільною шиною, а його вихід підключений до одного із входів реверсивного лічильника. Недоліком прототипу є велика похибка, а саме помилка, що дорівнює 90°, 180°, 270° і виникає в момент вмикання перетворювача, якщо вал датчика кута у даний момент нерухомий і повернений на один з кутів, дорівнюючих 0°, 90°, 180°, 270°. Причина виникнення цієї помилки полягає в тому, що при подаванні живильних напруг на слідкуючий перетворювач у реверсивному лічильнику можуть установлюватися значення кодів кута повороту, що відрізняються на 90°, 180°, 270° від кутів повороту датчика 0°, 90°, 180°, 270°. Наприклад, якщо вхідний вал датчика повернений на кут 270° і в момент увімкнення слідкуючого перетворювача у реверсивному лічильнику установився код 90°, то на виході блока віднімання напруга розузгодження буде дорівнювати нулю. Нульовою напруга буде через рівність співмножників (1) і (2) (1) Uosinw t sina cosb (2) Uosinw t cosa sinb де sin a, cos a - синус і косинус кута повороту вала датчика; sin b, cos b - синус і косинус коду, записаного у реверсивному лічильнику; Uo sin wt - збуджувальна напруга. У цьому прикладі, де Uo sin wt sin 270o cos 90 o Uo sin wt cos 270o sin 90 o , обидва співмножники нульові. Внаслідок цього імпульси на вхід реверсивного лічильника надходити не будуть, і значення коду реверсивного лічильника залишиться рівним 90°. В ряді випадків наявність цих помилок неприпустима, наприклад, при визначенні кута повороту нерухомого об'єкту. В основу корисної моделі поставлено завдання зменшення похибки слідкуючого перетворювача кута повороту вала в код. Поставлене завдання досягається тим, що у перетворювачі кута повороту вала в код, що містить синуснокосинусний датчик кута, виходи якого з'єднані з першими входами блоків множення, виходи яких підключені до входів блока віднімання, вихід якого підключений до входу компаратора і входу блока перетворення амплітуди напруги у послідовний код, вихід якого з'єднаний з лічильним входом реверсивного лічильника, який через блок синусно-косинусного перетворення коду підключений до других входів блоків множення, новим є те, що в нього введено блок формування імпульсу запису, вхід якого підключений до напруги живлення, а вихід з'єднаний із входом дозволу передустановлення реверсивного лічильника. Причинно-наслідковий зв'язок між сукупністю ознак винаходу і технічним результатом полягає в такому. Завдяки тому, що введено блок формування імпульсу запису, вхід якого підключений до напруги живлення, а вихід з'єднаний із входом дозволу передустановлення реверсивного лічильника, зменшується похибка слідкуючого перетворювача кута повороту вала в код. Структурну схему слідкуючого перетворювача кута повороту вала в код наведено на фіг.1. Слідкуючий перетворювач кута повороту вала в код містить синусно-косинусний датчик кута 1, синусна і косинусна обмотки якого підключені до входів блоків цифро-аналогового множення 2 і 3, виходи яких підключені до входу блока віднімання 4. Один із входів компаратора 5 з'єднаний з виходом блока віднімання 4, а другий - зі спільною шиною. Виходи блока синусно-косинусного перетворення коду 6 відповідно з'єднані з другими входами блоків цифро-аналогового множення 2 і 3. Вихід блока віднімання 4 через блок перетворення амплітуди напруги у послідовний код 7 з'єднаний з лічильним входом реверсивного лічильника 8, керуючий вхід якого з'єднаний з виходом компаратора 5, вхід дозволу передустановлення реверсивного лічильника 8 з'єднаний з виходом блока формування імпульсу запису 9. Вхід блока формування імпульсу запису 9 підключений до напруги живлення слідкуючого перетворювача. Вихід реверсивного лічильника 8 підключений до входу блока синусно-косинусного перетворення коду 6. Слідкуючий перетворювач кута повороту вала в код працює таким чином. При подаванні живильних напруг блок формування імпульсу запису 9 формує імпульсу запису, який записує у реверсивний лічильник 8 код початкового установлення. Значення коду початкового установлення вибирається виходячи з умови Nну¹0°, 90°, 180°, 270°. Далі, напруга Uo sin wt cos a з косинусної обмотки датчика 1, вал якого повернений на кут a , множиться блоком цифро-аналогового множення 2 на цифровий код sinb, що подається з синусного виходу блока синуснокосинусного перетворення коду 6. Напруга Uo sin wt sin a з синусної обмотки датчика 1, вал якого повернений на кут a , множиться блоком цифро-аналогового множення 3 на цифровий код cosb, що подається з косинусного виходу блока синусно-косинусного перетворення коду 6. Вихідні напруги блоків цифро-аналогового множення 2 і 3 віднімаються у блоці віднімання 4. На виході блока віднімання 4 формується напруга розузгодження: DU = Uo sin wt sin a cos b - Uo sin wt cos a sin b Компаратор 5 визначає знак напруги розузгодження DU , а блок перетворення амплітуди напруги в послідовний код 7 перетворює амплітуда напруги DU у кількість імпульсів. Імпульси з виходу блока перетворення амплітуди напруги в послідовний код 7 залежно від знаку напруги розузгодження додаються або віднімаються з кодом початкової установки Nну реверсивного лічильника 8, зменшуючи напругу DU . В результаті перетворення напруга розузгодження зменшиться до нульового значення і код b у реверсивному лічильнику 8 буде дорівнювати куту a повороту вала датчика 1. Таким чином, помилки, кратні 90° при кутах повороту a =0°, 90°, 180°, 270° датчика 1, які виникають при вмиканні слідкуючого перетворювача, виключаються, чим забезпечується зменшення похибки в його роботі.
ДивитисяДодаткова інформація
Автори англійськоюNikolenko Serhii Ivanovych
Автори російськоюНиколенко Сергей Иванович
МПК / Мітки
МПК: G08C 19/00, H03M 1/64
Мітки: код, кута, вала, слідкуючий, перетворювач, повороту
Код посилання
<a href="https://ua.patents.su/2-3149-slidkuyuchijj-peretvoryuvach-kuta-povorotu-vala-v-kod.html" target="_blank" rel="follow" title="База патентів України">Слідкуючий перетворювач кута повороту вала в код</a>
Перетворювач кута повороту вала в код
Номер патенту: 50217
Опубліковано: 15.10.2002
Автор: Ніколенко Сергій Іванович
МПК: H03M 1/64
Мітки: перетворювач, повороту, кута, вала, код
Формула / Реферат:
Перетворювач кута повороту вала в код, що містить фазообертач, вхід і вихід якого через перший і другий нуль компаратори відповідно підключені до входів тригера, вихід тригера і вихід генератора імпульсів підключені до входів першого елемента І, вихід якого підключений до інформаційного входу лічильника, виходи розрядів лічильника підключені до інформаційних входів першого регістра, шину живлення, підключену до входу фазообертача, який...
Перетворювач кута повороту вала в код
Номер патенту: 50224
Опубліковано: 15.10.2002
Автор: Ніколенко Сергій Іванович
МПК: H03M 1/64
Мітки: кута, вала, код, перетворювач, повороту
Формула / Реферат:
Перетворювач кута повороту вала в код, що містить фазообертач, вихід якого з’єднаний з входом першого нуль-компаратора, другий нуль-компаратор, послідовно з’єднані генератор імпульсів, подільник частоти, формувач напруги живлення фазообертача, вихід якого з’єднаний з одним входом першого елемента І, другий вхід якого підключений до виходу генератора імпульсів, а вихід з’єднаний з інформаційним входом лічильника, вихід якого з’єднаний з...
Перетворювач кута повороту вала у код
Номер патенту: 7409
Опубліковано: 29.09.1995
Автори: Нємковський Валентин Йосипович, Ніконов Дмитро Ніконорович, Макарчук Микола Андрійович
МПК: G01R 15/00, H02K 7/10
Мітки: повороту, вала, кута, перетворювач, код
Формула / Реферат:
Преобразователь угла поворота вала в код, содержащий синусно-косинусный вращающийся трансформатор, выходы которого подключены к аналоговым входам блока функционального преобразования кода в напряжение, выход которого через усилитель подключен к одному входу элемента И, другой вход элемента И соединен с выходом первого компаратора, выход источника команды ПУСК подключен к одному управляющему входу регистра и управляющему входу распределителя...
Фотоелектричний перетворювач кута повороту вала в код
Номер патенту: 9134
Опубліковано: 30.09.1996
Автори: Шаповал Світлана Леонідовна, Свєчніков Сергій Васильович, Богданович Віктор Борисович
МПК: G08C 19/36
Мітки: перетворювач, код, вала, фотоелектричний, кута, повороту
Формула / Реферат:
Фотоэлектрический преобразователь угла поворота вала в код по авт.св. №641484, отличающийся тем, что, с целью повышения быстродействия, кодовый фотоприемник содержит по две кодовые дорожки на разряд преобразователя, причем одна из дорожек сдвинута по отношению к другой на величину единиц данного разряда.
Фотоелектричний перетворювач кута повороту вала в код

Номер патенту: 9133
Опубліковано: 30.09.1996
Автори: Богданович Віктор Борисович, Кіяновський Олександр Павлович, Свєчніков Сергій Васильович, Паламарчук Олександр Леонідович
МПК: H03M 1/22
Мітки: фотоелектричний, повороту, кута, код, перетворювач, вала
Формула / Реферат:
Фотоэлектрический преобразователь угла поворота вала в код, содержащий источник излучения, оптически соединенный через модулятор, на котором нанесена основная щель, с n-разрядным кодовым фотоприемником, содержащим по две сдвинутые между собой на квант кодовые дорожки на разряд, отличающийся тем, что, с целью повышения точности и надежности преобразователя, на модуляторе нанесены 2n-2-1 дополнительные щели, равномерно расположенные по...
Попередній патент: Спосіб визначення дисфункції судинного ендотелію
Наступний патент: Пристрій для установлення логічних елементів у початковий стан
Випадковий патент: Спосіб лікування раку головки підшлункової залози