Спосіб дискретного виміру швидкості обертання вала двигуна нереверсивного приводу
Номер патенту: 32138
Опубліковано: 12.05.2008
Автори: Віждов Павел Іванович, Хижняк В'ячеслав Яковлевич, Ткаченко Григорій Іванович, Лясов Володимир Григорович, Бойченко Денис Володимирвоич, Башта Володимир Олексійович, Вайнер Аркадій Йосифович
Формула / Реферат
1. Спосіб дискретного виміру швидкості обертання вала приводного двигуна нереверсивного приводу, що включає вимір середнього значення швидкості за задану кількість обертів вала й видачу обмірюваного значення швидкості наприкінці інтервалу часу між двома сусідніми імпульсами датчиками кута повороту (ДКП), який відрізняється тим, що після подачі живлення на контролер по приходу першого імпульсу ДКП, здійснюють реєстрацію моменту його появи tn1 і моментів появи кожного наступного імпульсу tn2, ... , tnR у послідовності 1, 2, ... , R й одночасно виконують вирахування кількості прихожих імпульсів ДКП доти, поки воно не досягне значення R.
2. Спосіб за п. 1, який відрізняється тим, що вирахування кількості імпульсів R здійснюють по формулі:
R=K·N,
де К - кількість обертів вала, за якою визначається значення його швидкості, а
N - кількість імпульсів ДКП на один оберт.
3. Спосіб за пп. 1, 2, який відрізняється тим, що по приходу переднього фронту імпульсу R+1 у послідовності 1 виконують розрахунок часу її протікання Т1 і видають аналогове й цифрове значення швидкості обертання вала n1, а по приходу переднього фронту останнього імпульсу в послідовності 2 виконують розрахунок часу її протікання Т2 і видають аналогове й цифрове значення швидкості обертання вала n2.
4. Спосіб за п. 3, який відрізняється тим, що обчислення дискретного значення швидкості обертання вала ni виконують по формулі:
nі=Z·K·N/Ti,
де Z - коефіцієнт, що враховує К і N, а також необхідність видачі інформації про швидкості в розмірності об/хв,
Ti - час, за який вал зробив R обертів.
5. Спосіб за п. 4, який відрізняється тим, що час, за який вал зробив R обертів, Тi розраховують по формулі:
Ti=tиі-tпi,
де tиі - момент приходу переднього фронту останнього імпульсу в послідовності R,
tпi - момент приходу переднього фронту першого імпульсу в послідовності R.
6. Спосіб за пп. 1-5, який відрізняється тим, що програмну реалізацію алгоритму дискретного виміру швидкості обертання вала здійснюють методом "зсувного регістра" що передбачає наявність R виділених комірок пам'яті для зберігання часу приходу кожного імпульсу послідовності із заданою інформаційною ємністю W байт.
7. Спосіб за п. 6, який відрізняється тим, що по приходу (R+l)-гo імпульсу виконують обчислення середнього значення кутової швидкості обертання вала й зрушення виділених комірок пам'яті на один осередок уліво.
8. Спосіб за пп. 1-7, який відрізняється тим, що спосіб дискретного виміру швидкості обертання вала приводного двигуна кліті безперервного прокатного стана і його програмну реалізацію виконують із використанням ДКП, що має фіксовану кількість імпульсів на оберт, формувача сигналів, що забезпечує виробіток крутих фронтів необхідної амплітуди на вході контролера, контролера, що обробляє сигнали ДКП і розраховує значення швидкості обертання вала за К обертів останнього, і який видає значення швидкості через кожен імпульс ДКП.
9. Спосіб за пп. 1-8, який відрізняється тим, що спосіб дискретного виміру швидкості обертання вала приводного двигуна передбачає в плині формування першої послідовності імпульсів видачу сигналу в цифровому й аналоговому вигляді за лінійно-наростаючим законом із темпом зміни, рівним прискоренню механізму.
Текст
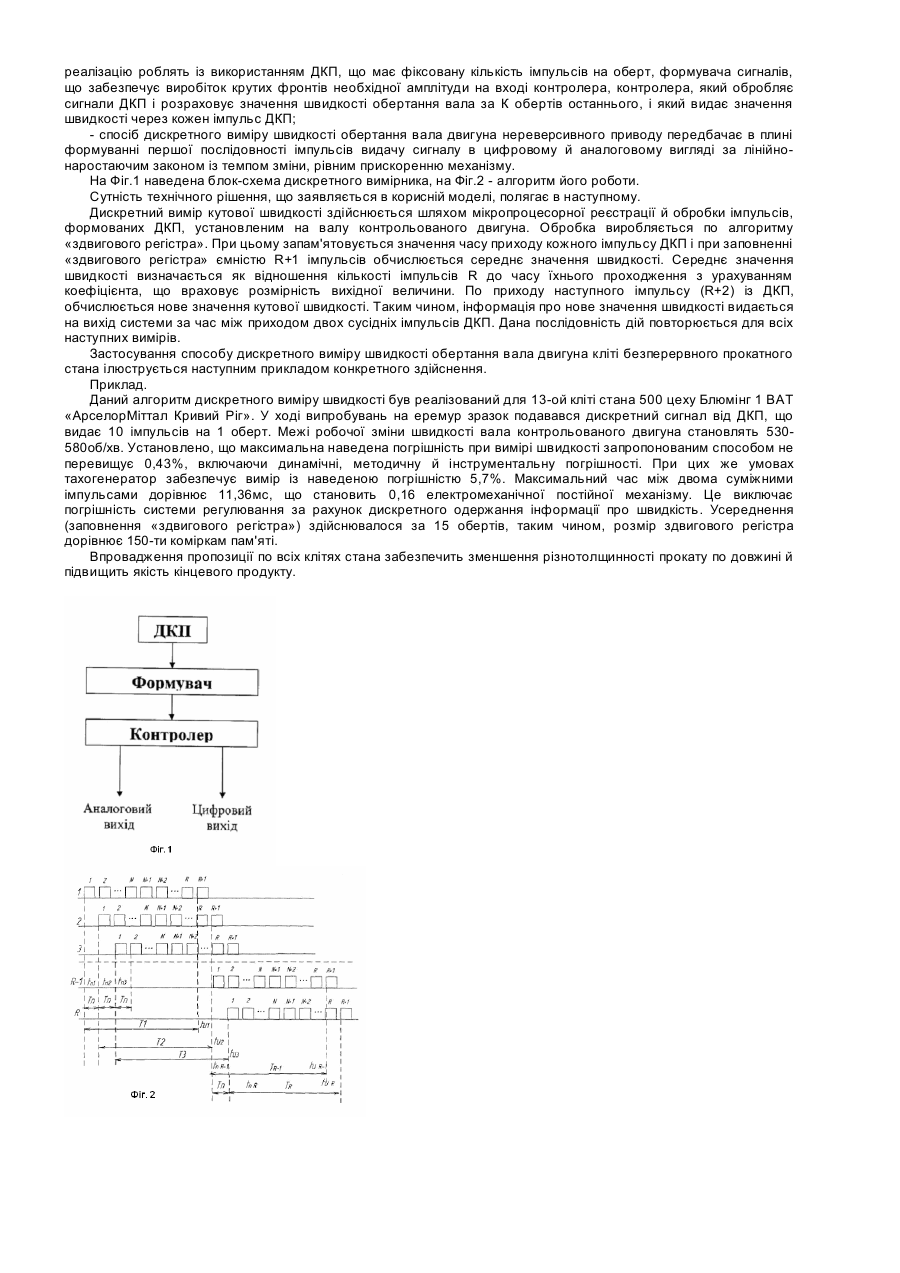
Корисна модель, що заявляється, ставиться до методів виміру швидкості, зокрема, до дискретного виміру швидкості обертання валів, і може бути використана для виміру швидкості обертання двигуна нереверсивного привода. Відомий спосіб реєстрації сигналів і методика обробки експериментальних даних [див., наприклад, «Исследования и изобретательство в машиностроении»: Учебник для студентов машиностроительных специальностей вузов / М.Ф. Пашкевич, А.А. Жолобов, Ж.А. Мрочек, Л.М Кожуро, В.М. Пашкевич; Под общ. Ред. М.Ф. Пашкевича. - Мн.: Адукацыя і выхаванне, 2005. - 287стор.]. Цей спосіб виміру частоти обертання валів механізмів включає аналіз сигналів перетворювача кругових переміщень BE-178А, імпульси від якого пов'язані з поточним часом, тобто позначені моментами часу t1 й t2, і розрахунок частоти обертання вала в межах цього інтервалу виконується за формулою:, Dj 2p w= = t 2 - t1 N(t 2 - t1 ) Dj - кутовий крок маски перетворювача; N - число імпульсів, що формуються перетворювачем за один де оберт. Недоліком відомого способу дискретного виміру швидкості є значна величина методичної погрішності через відносно малий інтервал часу виміру t2-t1, особливо на високих швидкостях. Відомий також спосіб виміру частоти сигналів у цифрових осцилографах [див. наприклад, Измерения в цифровых осциллографах и обработка результатов измерения. А.А. Дедюхин, ЗАО «Прист». http://www.prist.com/info.php/articles/dso_measurement.htm]. Даний спосіб включає вимір частоти по одному періоду сигналу, що знаходиться відразу після точки запуску розгорнення або по першому цілому періоду сигналу й/або вимір тимчасового інтервалу не по одному періоду, а по всіх періодах сигналу, що присутні в масиві даних, при цьому амплітуду сигналу забезпечують не менш 5 розподілів, а результат виміру визначається як середнє з масиву даних при нагромадженні 1000 результатів виміру частоти. Відомий спосіб виміру частоти сигналів у цифрових осцилографах забезпечує значне підвищення точності вимірів, а також можливість одержання результатів виміру для динамічних сигналів. Даний спосіб виміру в цифрових осцилографах й обробки результатів виміру по технічній сутності й по ефекту, що досягається, є найбільш близьким до заявляємого способу дискретного виміру швидкості обертання вала двигуна нереверсивного привода. Недоліком даного способу виміру частоти сигналів у цифрових осцилографах є відсутність можливості при тривалому (1000 вимірів) часу виміру видавати інформацію за малий проміжок часу, наприклад, за час між приходом двох сусідніх імпульсів від перетворювача кругових переміщень. Загальною ознакою найближчого аналога (прототипу) способу, що заявляється, є вимір середнього значення швидкості за задану кількість обертів вала й видача обмірюваного значення швидкості наприкінці інтервалу часу між двома сусідніми імпульсами датчиками кута повороту (ДКП). В основу корисної моделі поставлено задачу вдосконалення способу дискретного виміру швидкості обертання вала двигуна нереверсивного привода шляхом визначення швидкості за задану кількість обертів контрольованого вала з видачею інформації про швидкості через інтервал часу, який дорівнює проміжку часу між двома сусідніми сигналами від ДКП, що дозволить зменшити погрішність вимірів швидкості обертання валів, і, як наслідок, підвищити якість виробляємого продукту. Зазначений технічний результат досягається тим, що в способі дискретного виміру швидкості обертання вала двигуна нереверсивного привода, що включає вимір середнього значення швидкості за задану кількість обертів вала й видачу обмірюваного значення швидкості наприкінці інтервалу часу між двома сусідніми імпульсами датчиками кута повороту (ДКП), згідно до корисної моделі, що заявляється, - після подачі живлення на контролер по приходу першого імпульсу ДКП здійснюють реєстрацію моменту його появи tn1 і моментів появи кожного наступного імпульсу tn2, ... , tnR у послідовності 1, 2,... , R й одночасно роблять вирахування кількості приходящих імпульсів ДКП доти, поки воно не досягне значення R; - вирахування кількості імпульсів R здійснюють по формулі: R = К·N, де К - кількість обертів вала, за якою визначається значення його швидкості, а N - кількість імпульсів датчика кута повороту (ДКП) на один оберт; - по приходу переднього фронту імпульсу R+1 у послідовності 1 роблять розрахунок часу її протікання Т 1 і видають аналогове й цифрове значення швидкості обертання вала n1 , а по приходу переднього фронту останнього імпульсу в послідовності 2 роблять розрахунок часу її протікання Т 2 і видають аналогове й цифрове значення швидкості обертання вала n2. - обчислення дискретного значення швидкості обертання вала ni, роблять по формулі: nі=Z·K·N/Ti, де Z - коефіцієнт, що враховує К і N, а також необхідність видачі інформації про швидкості в розмірності об/хв, Ті - час, за який вал зробив R обертів; - час, за який вал зробив R обертів, Тi розраховують по формулі: Tі=tиi-tпі, де tиi - момент приходу переднього фронту останнього імпульсу в послідовності R, tпi - момент приходу переднього фронту першого імпульсу в послідовності R. - програмну реалізацію алгоритму дискретного виміру швидкості обертання вала здійснюють методом «здвигового регістра», що передбачає наявність R виділених комірок пам'яті для зберігання часу приходу кожного імпульсу послідовності із заданою інформаційною ємністю W байт; - по приходу (R+1)-гo імпульсу роблять обчислення середнього значення кутової швидкості обертання вала й зрушення виділених комірок пам'яті на один осередок уліво. - спосіб дискретного виміру швидкості обертання вала двигуна нереверсивного приводу і його програмну реалізацію роблять із використанням ДКП, що має фіксовану кількість імпульсів на оберт, формувача сигналів, що забезпечує виробіток крутих фронтів необхідної амплітуди на вході контролера, контролера, який обробляє сигнали ДКП і розраховує значення швидкості обертання вала за К обертів останнього, і який видає значення швидкості через кожен імпульс ДКП; - спосіб дискретного виміру швидкості обертання вала двигуна нереверсивного приводу передбачає в плині формуванні першої послідовності імпульсів видачу сигналу в цифровому й аналоговому вигляді за лінійнонаростаючим законом із темпом зміни, рівним прискоренню механізму. На Фіг.1 наведена блок-схема дискретного вимірника, на Фіг.2 - алгоритм його роботи. Сутність технічного рішення, що заявляється в корисній моделі, полягає в наступному. Дискретний вимір кутової швидкості здійснюється шляхом мікропроцесорної реєстрації й обробки імпульсів, формованих ДКП, установленим на валу контрольованого двигуна. Обробка виробляється по алгоритму «здвигового регістра». При цьому запам'ятовується значення часу приходу кожного імпульсу ДКП і при заповненні «здвигового регістра» ємністю R+1 імпульсів обчислюється середнє значення швидкості. Середнє значення швидкості визначається як відношення кількості імпульсів R до часу їхнього проходження з урахуванням коефіцієнта, що враховує розмірність вихідної величини. По приходу наступного імпульсу (R+2) із ДКП, обчислюється нове значення кутової швидкості. Таким чином, інформація про нове значення швидкості видається на вихід системи за час між приходом двох сусідніх імпульсів ДКП. Дана послідовність дій повторюється для всіх наступних вимірів. Застосування способу дискретного виміру швидкості обертання вала двигуна кліті безперервного прокатного стана ілюструється наступним прикладом конкретного здійснення. Приклад. Даний алгоритм дискретного виміру швидкості був реалізований для 13-ой кліті стана 500 цеху Блюмінг 1 ВАТ «АрселорМіттал Кривий Ріг». У ході випробувань на еремур зразок подавався дискретний сигнал від ДКП, що видає 10 імпульсів на 1 оберт. Межі робочої зміни швидкості вала контрольованого двигуна становлять 530580об/хв. Установлено, що максимальна наведена погрішність при вимірі швидкості запропонованим способом не перевищує 0,43%, включаючи динамічні, методичну й інструментальну погрішності. При цих же умовах тахогенератор забезпечує вимір із наведеною погрішністю 5,7%. Максимальний час між двома суміжними імпульсами дорівнює 11,36мс, що становить 0,16 електромеханічної постійної механізму. Це виключає погрішність системи регулювання за рахунок дискретного одержання інформації про швидкість. Усереднення (заповнення «здвигового регістра») здійснювалося за 15 обертів, таким чином, розмір здвигового регістра дорівнює 150-ти коміркам пам'яті. Впровадження пропозиції по всіх клітях стана забезпечить зменшення різнотолщинності прокату по довжині й підвищить якість кінцевого продукту.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for discrete measurement of rate of rotation of shaft of motor on non-reversing drive
Автори англійськоюTkachenko Hryhorii Ivanovych, Boichenko Denys Volodymyrovych, Bashta Volodymyr Oleksiiovych, Vainer Arkadii Yosypovych, Vizhdov Pavlo Ivanovych, Liasov Volodymyr Hryhorovych, Khyzhniak Viacheslav Yakovych
Назва патенту російськоюСпособ дискретного измерения скорости вращения вала двигателя нереверсивного привода
Автори російськоюТкаченко Григорий Иванович, Бойченко Денис Владимирвоич, Башта Владимир Алексеевич, Вайнер Аркадий Иосифович, Виждов Павел Иванович, Лясов Владимир Григорьевич, Хижняк Вячеслав Яковлевич
МПК / Мітки
МПК: G01P 15/08
Мітки: вала, приводу, дискретного, обертання, двигуна, спосіб, нереверсивного, виміру, швидкості
Код посилання
<a href="https://ua.patents.su/2-32138-sposib-diskretnogo-vimiru-shvidkosti-obertannya-vala-dviguna-nereversivnogo-privodu.html" target="_blank" rel="follow" title="База патентів України">Спосіб дискретного виміру швидкості обертання вала двигуна нереверсивного приводу</a>
Спосіб управління кутовою швидкістю обертання вала приводу плунжера паливного насоса
Номер патенту: 49949
Опубліковано: 15.10.2002
Автори: Грігор`єв Олександр Львович, Король Сергій Олександрович
МПК: F02M 39/00
Мітки: обертання, паливного, кутовою, управління, насоса, швидкістю, плунжера, приводу, спосіб, вала
Формула / Реферат:
1. Спосіб управління кутовою швидкістю обертання вала приводу плунжера паливного насоса, при якому передають обертання від вала дизеля з встановленим рівномірним або нерівномірним чергуванням моментів початку подачі палива в циліндри до вала приводу плунжера паливного насоса з розмежованими у часі періодами робочого ходу плунжерів і для кожного проміжку часу між послідовними моментами початку подачі палива підтримують постійним для всіх...
Пристрій для вимірювання швидкості обертання вала
Номер патенту: 82324
Опубліковано: 10.04.2008
Автори: Наконечний Микола Петрович, Іванченко Олександр Васильович
МПК: G01P 3/36
Мітки: вала, швидкості, обертання, пристрій, вимірювання
Формула / Реферат:
Пристрій для вимірювання швидкості обертання вала, що містить два фотоприймачі, два генератори струму, які живлять два джерела світла, закріплений на валу модулятор з отворами та перемичкою, що розташований між джерелами світла і фотоприймачами, причому перший фотоприймач встановлений навпроти першого джерела світла, а другий - навпроти другого джерела світла, який відрізняється тим, що ширина перемички більша за ширину отвору модулятора,...
Пристрій для вимірювання швидкості обертання вала
Номер патенту: 48585
Опубліковано: 15.08.2002
Автори: Іванченко Олександр Васильович, Наконечний Микола Петрович
Мітки: пристрій, обертання, вимірювання, швидкості, вала
Формула / Реферат:
Пристрій для вимірювання швидкості обертання вала, що містить закріплені на валу модулятор з отворами, два фотоприймачі, два генератори струму, які живлять два джерела світла, причому перший фотоприймач встановлений навпроти першого джерела світла і отвору модулятора, а другий - навпроти другого джерела світла і перемички між отворами модулятора, який відрізняється тим, що ширина перемички більш ніж у два рази перевищує ширину отвору...
Пристрій управління частотою обертання колінчастого вала двигуна внутрішнього згоряння

Номер патенту: 23917
Опубліковано: 31.08.1998
Автори: Солоха Олег Олексійович, Білогуб Олександр Віталійович, Щербіна Андрій Григорович, Зотов Олександр Олександрович
Мітки: управління, двигуна, колінчастого, частотою, згоряння, вала, пристрій, обертання, внутрішнього
Формула / Реферат:
Пристрій управління частотою обертання колінчастого вала двигуна внутрішнього згоряння, що містить кроковий електродвигун, кінематично зв'язаний гвинтовим виконавчим механізмом з підпружиненою рейкою паливного насоса, та механізм аварійного відключення подачі палива, який відрізняється тим, що гвинтовий виконавчий механізм виконаний у вигляді барабана, який насаджений на вал електродвигуна, з гвинтовою канавкою, створеною на його зовнішній...
Пристрій для управління кутовою швидкістю обертання вала приводу плунжера паливного насоса
Номер патенту: 64250
Опубліковано: 16.02.2004
Автори: Єлістратов Вячеслав Олександрович, Король Сергій Олександрович, Грігор`єв Олександр Львович
МПК: F02M 39/00
Мітки: паливного, плунжера, приводу, швидкістю, управління, кутовою, вала, обертання, пристрій, насоса
Формула / Реферат:
1. Пристрій для управління кутовою швидкістю обертання вала приводу плунжера паливного насоса, що має силову передачу з жорсткими ланками, зв'язану з валом дизеля і валом приводу плунжера, який відрізняється тим, що пристрій забезпечений вузлом зміни миттєвого передавального відношення, який має один і більше перетворювачів кутової швидкості обертання з періодичним законом передавальних відношень між ведучим і веденим валами перетворювача,...
Попередній патент: Секційна піч швидкісного нагріву
Наступний патент: Спосіб визначення ступеня ураження приміщень мікроскопічними грибами
Випадковий патент: Спосіб розміщення реклами та рекламний засіб для його здійснення