Регульований механізм поступального переміщення
Номер патенту: 32190
Опубліковано: 12.05.2008
Автори: Амбарцумянц Роберт Вачаганович, Амбарцумянц Рубен Робертович, Олісеєнко Юрій Володимирович
Формула / Реферат
Регульований механізм поступального руху, що містить нерухоме центральне колесо, сателіт, вал з водилом, шток та повзун, який відрізняється тим, що центральне колесо виконане у вигляді черв'ячного колеса, яке встановлене у корпусі механізму з можливістю руху, також конструкція додатково містить зчеплений з черв'ячним колесом самогальмуючий черв'як, який одним кінцем встановлений з можливістю руху в корпусі, а іншим кінцем у кронштейні, жорстко закріпленому в корпусі, а шток утворює шарнірне з'єднання з повзуном.
Текст
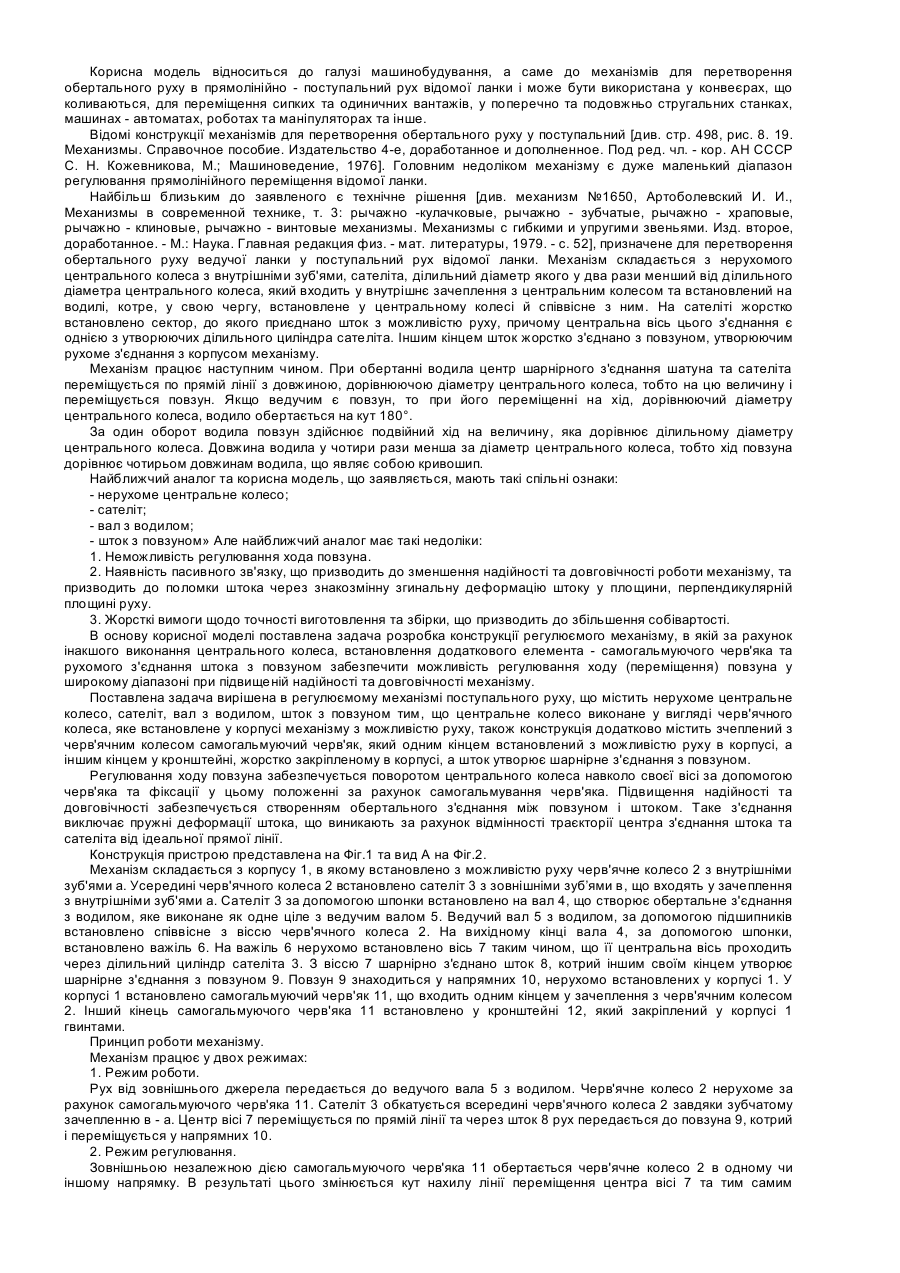
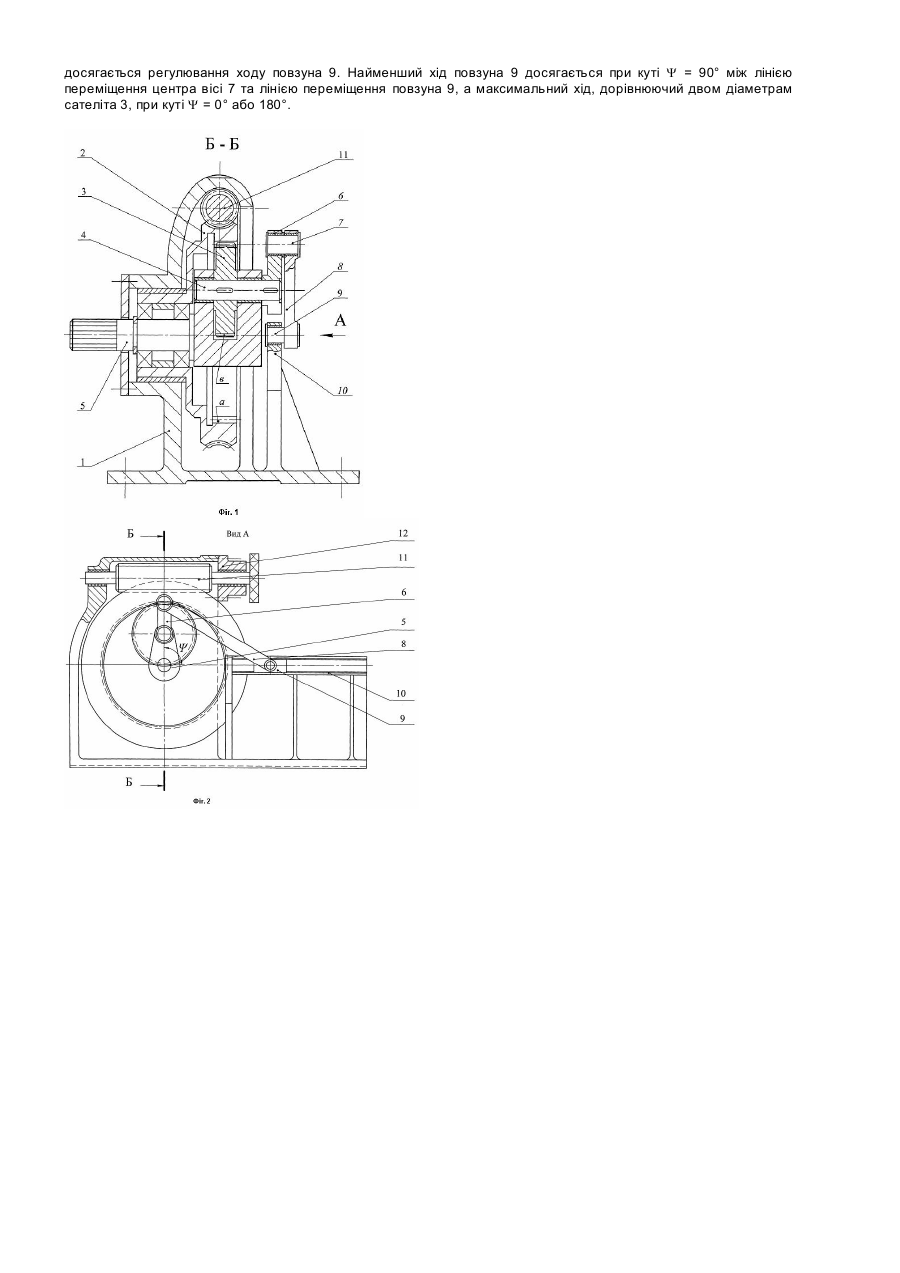
Корисна модель відноситься до галузі машинобудування, а саме до механізмів для перетворення обертального руху в прямолінійно - поступальний рух відомої ланки і може бути використана у конвеєрах, що коливаються, для переміщення сипких та одиничних вантажів, у поперечно та подовжньо стругальних станках, машинах - автоматах, роботах та маніпуляторах та інше. Відомі конструкції механізмів для перетворення обертального руху у поступальний [див. стр. 498, рис. 8. 19. Механизмы. Справочное пособие. Издательство 4-е, доработанное и дополненное. Под ред. чл. - кор. АН СССР С. Н. Кожевникова, М.; Машиноведение, 1976]. Головним недоліком механізму є дуже маленький діапазон регулювання прямолінійного переміщення відомої ланки. Найбільш близьким до заявленого є технічне рішення [див. механизм №1650, Артоболевский И. И., Механизмы в современной технике, т. 3: рычажно -кулачковые, рычажно - зубчатые, рычажно - храповые, рычажно - клиновые, рычажно - винтовые механизмы. Механизмы с гибкими и упругими звеньями. Изд. второе, доработанное. - М.: Наука. Главная редакция физ. - мат. литературы, 1979. - с. 52], призначене для перетворення обертального руху ведучої ланки у поступальний рух відомої ланки. Механізм складається з нерухомого центрального колеса з внутрішніми зуб'ями, сателіта, ділильний діаметр якого у два рази менший від ділильного діаметра центрального колеса, який входить у внутрішнє зачеплення з центральним колесом та встановлений на водилі, котре, у свою чергу, встановлене у центральному колесі й співвісне з ним. На сателіті жорстко встановлено сектор, до якого приєднано шток з можливістю руху, причому центральна вісь цього з'єднання є однією з утворюючих ділильного циліндра сателіта. Іншим кінцем шток жорстко з'єднано з повзуном, утворюючим рухоме з'єднання з корпусом механізму. Механізм працює наступним чином. При обертанні водила центр шарнірного з'єднання шатуна та сателіта переміщується по прямій лінії з довжиною, дорівнюючою діаметру центрального колеса, тобто на цю величину і переміщується повзун. Якщо ведучим є повзун, то при його переміщенні на хід, дорівнюючий діаметру центрального колеса, водило обертається на кут 180°. За один оборот водила повзун здійснює подвійний хід на величину, яка дорівнює ділильному діаметру центрального колеса. Довжина водила у чотири рази менша за діаметр центрального колеса, тобто хід повзуна дорівнює чотирьом довжинам водила, що являє собою кривошип. Найближчий аналог та корисна модель, що заявляється, мають такі спільні ознаки: - нерухоме центральне колесо; - сателіт; - вал з водилом; - шток з повзуном» Але найближчий аналог має такі недоліки: 1. Неможливість регулювання хода повзуна. 2. Наявність пасивного зв'язку, що призводить до зменшення надійності та довговічності роботи механізму, та призводить до поломки штока через знакозмінну згинальну деформацію штоку у площини, перпендикулярній площині руху. 3. Жорсткі вимоги щодо точності виготовлення та збірки, що призводить до збільшення собівартості. В основу корисної моделі поставлена задача розробка конструкції регулюємого механізму, в якій за рахунок інакшого виконання центрального колеса, встановлення додаткового елемента - самогальмуючого черв'яка та рухомого з'єднання штока з повзуном забезпечити можливість регулювання ходу (переміщення) повзуна у широкому діапазоні при підвищеній надійності та довговічності механізму. Поставлена задача вирішена в регулюємому механізмі поступального руху, що містить нерухоме центральне колесо, сателіт, вал з водилом, шток з повзуном тим, що центральне колесо виконане у вигляді черв'ячного колеса, яке встановлене у корпусі механізму з можливістю руху, також конструкція додатково містить зчеплений з черв'ячним колесом самогальмуючий черв'як, який одним кінцем встановлений з можливістю руху в корпусі, а іншим кінцем у кронштейні, жорстко закріпленому в корпусі, а шток утворює шарнірне з'єднання з повзуном. Регулювання ходу повзуна забезпечується поворотом центрального колеса навколо своєї вісі за допомогою черв'яка та фіксації у цьому положенні за рахунок самогальмування черв'яка. Підвищення надійності та довговічності забезпечується створенням обертального з'єднання між повзуном і штоком. Таке з'єднання виключає пружні деформації штока, що виникають за рахунок відмінності траєкторії центра з'єднання штока та сателіта від ідеальної прямої лінії. Конструкція пристрою представлена на Фіг.1 та вид А на Фіг.2. Механізм складається з корпусу 1, в якому встановлено з можливістю руху черв'ячне колесо 2 з внутрішніми зуб'ями а. Усередині черв'ячного колеса 2 встановлено сателіт 3 з зовнішніми зуб’ями в, що входять у зачеплення з внутрішніми зуб'ями а. Сателіт 3 за допомогою шпонки встановлено на вал 4, що створює обертальне з'єднання з водилом, яке виконане як одне ціле з ведучим валом 5. Ведучий вал 5 з водилом, за допомогою підшипників встановлено співвісне з віссю черв'ячного колеса 2. На вихідному кінці вала 4, за допомогою шпонки, встановлено важіль 6. На важіль 6 нерухомо встановлено вісь 7 таким чином, що її центральна вісь проходить через ділильний циліндр сателіта 3. З віссю 7 шарнірно з'єднано шток 8, котрий іншим своїм кінцем утворює шарнірне з'єднання з повзуном 9. Повзун 9 знаходиться у напрямних 10, нерухомо встановлених у корпусі 1. У корпусі 1 встановлено самогальмуючий черв'як 11, що входить одним кінцем у зачеплення з черв'ячним колесом 2. Інший кінець самогальмуючого черв'яка 11 встановлено у кронштейні 12, який закріплений у корпусі 1 гвинтами. Принцип роботи механізму. Механізм працює у двох режимах: 1. Режим роботи. Рух від зовнішнього джерела передається до ведучого вала 5 з водилом. Черв'ячне колесо 2 нерухоме за рахунок самогальмуючого черв'яка 11. Сателіт 3 обкатується всередині черв'ячного колеса 2 завдяки зубчатому зачепленню в - а. Центр вісі 7 переміщується по прямій лінії та через шток 8 рух передається до повзуна 9, котрий і переміщується у напрямних 10. 2. Режим регулювання. Зовнішньою незалежною дією самогальмуючого черв'яка 11 обертається черв'ячне колесо 2 в одному чи іншому напрямку. В результаті цього змінюється кут нахилу лінії переміщення центра вісі 7 та тим самим досягається регулювання ходу повзуна 9. Найменший хід повзуна 9 досягається при куті Y = 90° між лінією переміщення центра вісі 7 та лінією переміщення повзуна 9, а максимальний хід, дорівнюючий двом діаметрам сателіта 3, при куті Y = 0° або 180°.
ДивитисяДодаткова інформація
Назва патенту англійськоюVariable mechanism of translational motion
Автори англійськоюAmbartsumiants Robert Vachahanovych, Ambartsumiants Ruben Robertovych, Oliseenko Yurii Volodymyrovych
Назва патенту російськоюРегулируемый механизм поступательного перемещения
Автори російськоюАмбарцумянц Роберт Вачаганович, Амбарцумянц Рубен Робертович, Олесеенко Юрий Владимирович
МПК / Мітки
МПК: F16H 29/00
Мітки: механізм, регульованій, переміщення, поступального
Код посилання
<a href="https://ua.patents.su/2-32190-regulovanijj-mekhanizm-postupalnogo-peremishhennya.html" target="_blank" rel="follow" title="База патентів України">Регульований механізм поступального переміщення</a>
Регульований двоколісний зубчасто-важільний механізм
Номер патенту: 28676
Опубліковано: 25.12.2007
Автори: Тутаєв Сергій Валерійович, Амбарцумянц Роберт Вачаганович
МПК: F16H 29/00
Мітки: зубчасто-важільний, регульованій, механізм, двоколісний
Формула / Реферат:
Двоколісний зубчасто-важільний механізм, що містить ведучий та вихідний вали, сателіт, центральне колесо, водило, шатун, коромисло, який відрізняється тим, що на сателіті встановлена вилка, в якій рухливо встановлений гвинт із роликом на кінці, на гвинті встановлений повзун, що утворює із гвинтом гвинтову пару, і водночас рухливо з’єднаний з шатуном, повзун разом з вилкою перебуває усередині У-подібного корпусу, який встановлено на штоці,...
Регульований зубчасто-важільний механізм

Номер патенту: 31037
Опубліковано: 25.03.2008
Автори: Тутаєв Сергій Валерійович, Амбарцумянц Роберт Вачаганович
МПК: F16H 29/00
Мітки: механізм, регульованій, зубчасто-важільний
Формула / Реферат:
Регульований зубчасто-важільний механізм, що містить ведучий та ведений вали, сателіти, центральне колесо, водило, шатуни, кривошипи, вихідну ланку, який відрізняється тим, що вихідна ланка складається з циліндричних стрижнів і фланця, що має циліндричні пази і співвісний з ведучим валом отвір, у якому встановлений шток, на одному кінці якого рухомо встановлена втулка, до якої одним кінцем шарнірно кріпляться важелі однакової довжини, інший...
Важільно-крутильний механізм з перетворенням зворотно-поступального руху в обертальний без мертвих точок

Номер патенту: 2232
Опубліковано: 15.12.2003
Автор: Мокрицький Аполлінарій Степанович
МПК: F16H 21/28, F16H 21/00, F16H 21/44, F16H 21/04
Мітки: важільно-крутильний, мертвих, перетворенням, точок, руху, обертальний, механізм, зворотно-поступального
Формула / Реферат:
Важільно-крутильний механізм з перетворенням зворотно-поступального руху в обертальний без мертвих точок, що містить корпус, шарнірно зв'язаний з ним двоплечий колінвал, пару коромисел, кінцями шарнірно з'єднаних з одного боку з плечима колінвала, а з другого боку - кінцями з шатунами, пару маятникових підвісок, кінцями шарнірно з'єднаних з одного боку з середніми частинами коромисел, а протилежними кінцями - з корпусом, пару шатунів,...
Механізм для перетворення зворотно-поступального руху в обертовий та навпаки і машина(варіанти), яка містить цей механізм
Номер патенту: 37285
Опубліковано: 15.05.2001
Автор: Адахан Кармелі
МПК: F01B 9/00, F04B 35/00
Мітки: яка, перетворення, руху, обертовий, зворотно-поступального, машина(варіанти, містить, механізм, навпаки
Формула / Реферат:
1. Механізм для перетворення зворотно-поступального руху в обертовий та навпаки, установлений між засобом обертання і засобом зворотно-поступального руху, один з яких є ведучим, а другий видимим, для того, щоб обертовий рух у засобі обертання відповідав зворотно-поступальному руху в засобі зворотно - поступального руху, який містить корпус» зворотно-поступальний елемент, що установлений з можливістю зворотно-поступального руху уздовж...
Регульований кривошипний механізм
Номер патенту: 65226
Опубліковано: 15.03.2004
Автори: Амбарцумянц Рубен Робертович, Ліпін Андрій Павлович
МПК: F16H 57/00
Мітки: регульованій, кривошипний, механізм
Формула / Реферат:
Регульований кривошипний механізм, що містить корпус, привідний вал, встановлений у ньому кривошипний вал із кривошипом, гвинтове сполучення, механізм приводу гвинта, який відрізняється тим, що на привідному валу виконані два діаметрально протилежних подовжніх отвори, в один з яких встановлений кривошипний вал із жорстко з'єднаними з ним двома противагами динамічного зрівноважування і кривошипом, співвісно з яким виконано подовжній внутрішній...
Попередній патент: Спосіб автоматичного керування процесом варки паштету у жароварочній шафі
Наступний патент: Спосіб обліку ураженості зернових та зернобобових культур листовими хворобами
Випадковий патент: Пристрій для формування будівельних виробів