Корпус апарата
Номер патенту: 46638
Опубліковано: 15.05.2002
Автори: Бабенко Віктор Віталійович, Поліщук Сергій Володимирович
Формула / Реферат
Корпус апарата з нерухомими нижніми крилами і рухомими верхніми крилами, який відрізняється тим, що рухомі верхні крила встановлені з можливістю їх переміщення у виїмці корпусу апарата, в якому, як і у тілі нижніх крил, розміщені електродвигуни поворотного типу, на осях яких жорстко закріплені тяги, шарнірно з'єднані з верхніми рухомими крилами.
Текст
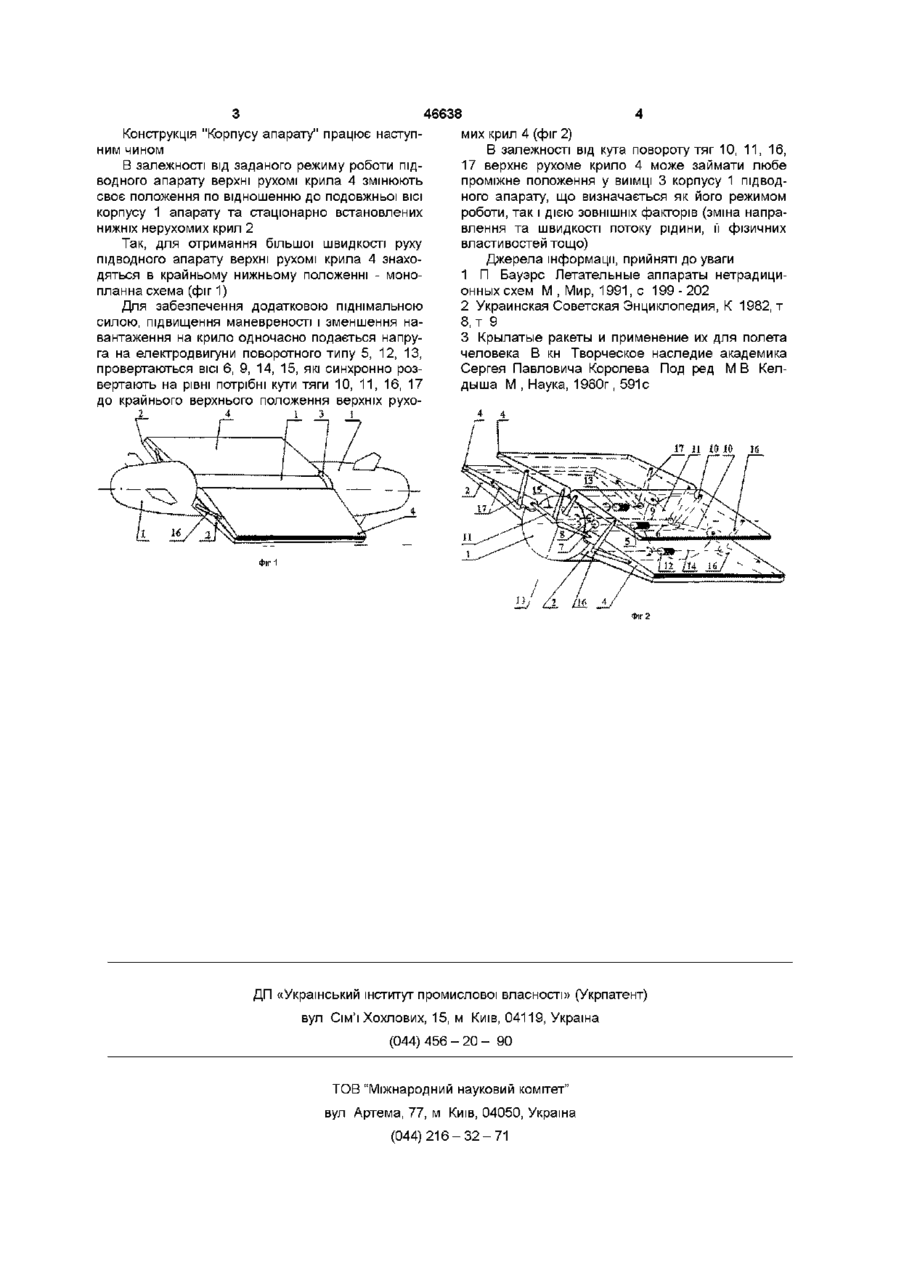
Корпус апарата з нерухомими нижніми крилами і рухомими верхніми крилами, який відрізняється тим, що рухомі верхні крила встановлені з можливістю їх переміщення у виїмці корпусу апарата, в якому, як і у ТІЛІ нижніх крил, розміщені електродвигуни поворотного типу, на осях яких жорстко закріплені тяги, шарнірно з'єднані з верхніми рухомими крилами Винахід відноситься до галузі суднобудування і може бути використаний при проектуванні, розробці та створенні підводних апаратів багатоцільового призначення В техніці ВІДОМІ конструкції корпусів підводних апаратів (Украинская Советская Энциклопедия, К 1982, т 8, с 325 - 326, т 9, с 216) ВІДОМІ також конструкції літаків - біпланів і монопланів БІЛЬШІСТЬ конструкцій бі-монопланів будувалась як бі-моноплани, оснащені засобами установки другого крила Другим підходом до створення бі-монопланів було використання двох різних комплектів крил замість установки додаткового крила До бі-монопланів відносяться літаки Текса Уайлдкет, Кактус Кіктен, XF-13C-1, XF-13C2, XF-13C-3, XF6C-6 фірми Кертісс, Юнкере Т-19, Юнкере Т-26, Юнкере Т-26Е, Юнкере Т-26Д, Фоккер F-V фірми Фоккер еркрафт, Флай Бебі, Стінсон L-5, РТ-22 фірми Райан та ІНШІ Найбільш близькими по технічній суті до запропонованого винаходу є літаки Бі-Моно фірми Хілсон та Харікейні фірми Хоукер, в яких після набору висоти верхні крила відстрілювались, і літаки продовжували політ як ШВИДКІСНІ моноплани тільки із нижніми крилами (П Бауэре, Летательные аппараты нетрадиционных схем М , Мир, 1991, с 199-202) Основними недоліками цих розробок є те, що при переході на монопланну схему втрачались переваги, притаманні біпланам, а саме додаткова піднімальна сила, маневреність, зменшення навантаження на крило Задачею нинішнього винаходу є оптимізація руху підводного апарату в залежності від даного моменту Поставлена задача вирішується за рахунок того, що в корпусі підводного апарату з нижніми нерухомими і верхніми рухомими крилами, останні встановлені із можливістю їх переміщення вподовж виїмки в корпусі апарату, при чому як в корпусі, так і в ТІЛІ нижніх нерухомих крил розташовані електродвигуни поворотного типу, на вісях яких жорстко закріплені тяги, шарнірно з'єднані із верхніми рухомими крилами Така конструкція корпусу підводного апарату з нижніми нерухомими і верхніми рухомими крилами дозволяє отримувати необхідні якості монопланної схеми - підвищення швидкості руху і біпланної схеми -забезпечення додатковою піднімальною силою, підвищення маневреності і зменшення навантаження на крило Загальний вигляд конструкції "Корпус апарата" показана на фіг1, а на фіг 2 представлена секція корпусу підводного апарату з нижніми нерухомими і верхніми рухомими крилами в дії Конструкція "Корпусу апарату" містить власне корпус 1 із стаціонарно закріпленими на ньому нерухомими нижніми крилами 2 і виїмкою 3 з вміщеними в ній рухомими верхніми крилами 4, електродвигуном поворотного типу 5, на ВІСІ ЯКОГО 6 встановлена шестерня 7, що входить в зачеплення із шестернею 8 з віссю 9, які жорстко скріплені ВІДПОВІДНО із тягами 10 і 11, шарнірно з'єднаними з рухомими верхніми крилами, а в ТІЛІ НИЖНІХ крил також розташовані електродвигуни поворотного типу 12 і 13, ВІСІ 14 і 15 яких жорстко скріплені ВІДПОВІДНО ІЗ тягами 16 і 17, шарнірно з'єднаними з верхніми крилами 00 со (О (О 46638 Конструкція "Корпусу апарату" працює наступним чином В залежності від заданого режиму роботи підводного апарату верхні рухомі крила 4 змінюють своє положення по відношенню до подовжньої ВІСІ корпусу 1 апарату та стаціонарно встановлених нижніх нерухомих крил 2 Так, для отримання більшої швидкості руху підводного апарату верхні рухомі крила 4 знаходяться в крайньому нижньому положенні - монопланна схема (фіг 1) Для забезпечення додатковою піднімальною силою, підвищення маневреності і зменшення навантаження на крило одночасно подається напруга на електродвигуни поворотного типу 5, 12, 13, провертаються ВІСІ 6, 9, 14, 15, які синхронно розвертають на рівні потрібні кути тяги 10, 11, 16, 17 до крайнього верхнього положення верхніх рухо2 4 1 3 мих крил 4 (фіг 2) В залежності від кута повороту тяг 10, 11, 16, 17 верхнє рухоме крило 4 може займати любе проміжне положення у виїмці 3 корпусу 1 підводного апарату, що визначається як його режимом роботи, так і дією ЗОВНІШНІХ факторів (зміна направлення та швидкості потоку рідини, її фізичних властивостей тощо) Джерела інформації, прийняті до уваги 1 П Бауэре Летательные аппараты нетрадиционных схем М , Мир, 1991, с 199-202 2 Украинская Советская Энциклопедия, К 1982, т 8, т 9 3 Крылатые ракеты и применение их для полета человека В кн Творческое наследие академика Сергея Павловича Королева Под ред М В Келдыша М , Наука, 1980г, 591с 1 17 11 10 10 Li. ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044) 456 - 20 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71 16
ДивитисяДодаткова інформація
Автори англійськоюPolischuk Serhii Volodymyrovych, Babenko Viktor Vitaliiovych
Автори російськоюПолищук Сергей Владимирович, Бабенко Виктор Витальевич
МПК / Мітки
МПК: B63H 23/00, B63B 3/13
Код посилання
<a href="https://ua.patents.su/2-46638-korpus-aparata.html" target="_blank" rel="follow" title="База патентів України">Корпус апарата</a>
Корпус апарата
Номер патенту: 29634
Опубліковано: 15.11.2000
Автори: Коробов Віталій Ілліч, Поліщук Сергій Володимирович, Бабенко Віктор Вітальович
Текст:
...с повернутыми (по часовой стрелке) на угол менее 90° верхним и на угол более 90° нижним поворотно-скользящими крыльями относительно продольной оси подводного аппарата. Устройство содержит собственно корпус 1 подводного управляемого аппарата с встроенными в нем электродвигателями поворотного типа 2 и 3, вертикально расположенные выходные оси которых соответственно 4 и 5 соединены с верхним 6 и нижним 7 поворотно-скользящими крыльями с...
Підводний апарат з плавцевим рушієм
Номер патенту: 41616
Опубліковано: 17.09.2001
Автори: Бабенко Віктор Віталійович, Поліщук Сергій Володимирович, Коробов Віталій Ілліч, Мороз Володимир Василійович, Мартиненко Іван Іванович
Мітки: підводний, плавцевим, апарат, рушієм
Формула / Реферат:
Підводний апарат з плавцевим рушієм, в носовій і кормовій частинах якого розміщені електродвигуни, який відрізняється тим, що на вихідному валу електродвигуна, розміщеного в носовій частині підводного апарату, закріплений з можливістю його повороту на 180° кронштейн з поперечкою, на обох боках якої встановлені крила, а в прорізу кормової частини є кронштейн з електродвигуном, на осі якого закріплено стебло з плавцевим рушієм.
Підводний планер

Номер патенту: 42202
Опубліковано: 15.10.2001
Автори: Майстер Валентин Іванович, Коробов Віталій Ілліч, Бабенко Віктор Віталійович, Поліщук Сергій Володимирович, Мороз Володимир Василійович
Формула / Реферат:
Підводний планер, який містить корпус з регульованою несучою поверхнею, який відрізняється тим, що остання, з можливістю її повороту на 360°, встановлена на нерухомих частинах несучої поверхні з обох сторін корпусу підводного планера, а складений плавцевий рушій містить стаціонарну та рухомі частини з висувними пластинами, кожна з яких з’єднана з сердечниками соленоїдів.
Пульсатор доїльного апарата
Номер патенту: 33187
Опубліковано: 15.02.2001
Автори: Чорний Микола Васильович, Фененко Анатолій Іванович, Прудніков Василь Григорович, Могильний Олександр Миколаєвич, Ясенецький Володимир Антонович, Грицаєнко Людмила Володимирівна
МПК: A01J 7/00
Мітки: апарата, пульсатор, доїльного
Текст:
...доїльних апаратів» Відомо пневматичний пульсатор доїльного апарату,включаючий клапано-мембран*&й механізм,робочу і управляючі камери змінного тивку,з'вднан і перегулюючим роз'ємним по давжині дроселем,розміщеним між тарілкою клапана і мембраною /!/• Відомий пульсатор в разі засорения його дроееяя не забезпечує необхідного режиму/ роботи доїльного апарата. Відомо також пневматичний пульсатор доїльного апарату,уйа£ робочу і ^ррушчі...
Корпус плуга
Номер патенту: 44160
Опубліковано: 15.01.2002
Автори: Тищенко Олег Сергійович, Тищенко Сергій Сергійович
МПК: A01B 15/00
Формула / Реферат:
Корпус плуга, який має стояк з башмаком, лемешем, полицею і ножем з лезом, що має направляючу частину, яка є продовженням леза, розташовану вище польового обрізу корпуса і відхилену від вертикалі в сторону його борознового обрізу, який відрізняється тим, що лобовий контур направляючої частини виконаний у вигляді кривої змінного радіусу кривини, котрий дорівнює нулю в точці переходу ножа у направляючу частину і в кінцевій точці кривої, яка...
Попередній патент: Спосіб контролю амплітудного каналу фазованої антенної решітки
Наступний патент: Корпус апарата
Випадковий патент: Матеріал для виготовлення труб, працюючих в особливо агресивних середовищах