Корпус апарата
Номер патенту: 46639
Опубліковано: 15.05.2002
Автори: Бабенко Віктор Віталійович, Поліщук Сергій Володимирович
Формула / Реферат
Корпус апарата з встановленими з можливістю переміщення консолями крил, який відрізняється тим, що останні з’єднані з корпусом за допомогою кривошипно-шатунного механізму, причому кожна з консолей послідовно жорстко скріплена з відповідною віссю електродвигуна, розміщеного в корпусі з можливістю її несинхронного переміщення.
Текст
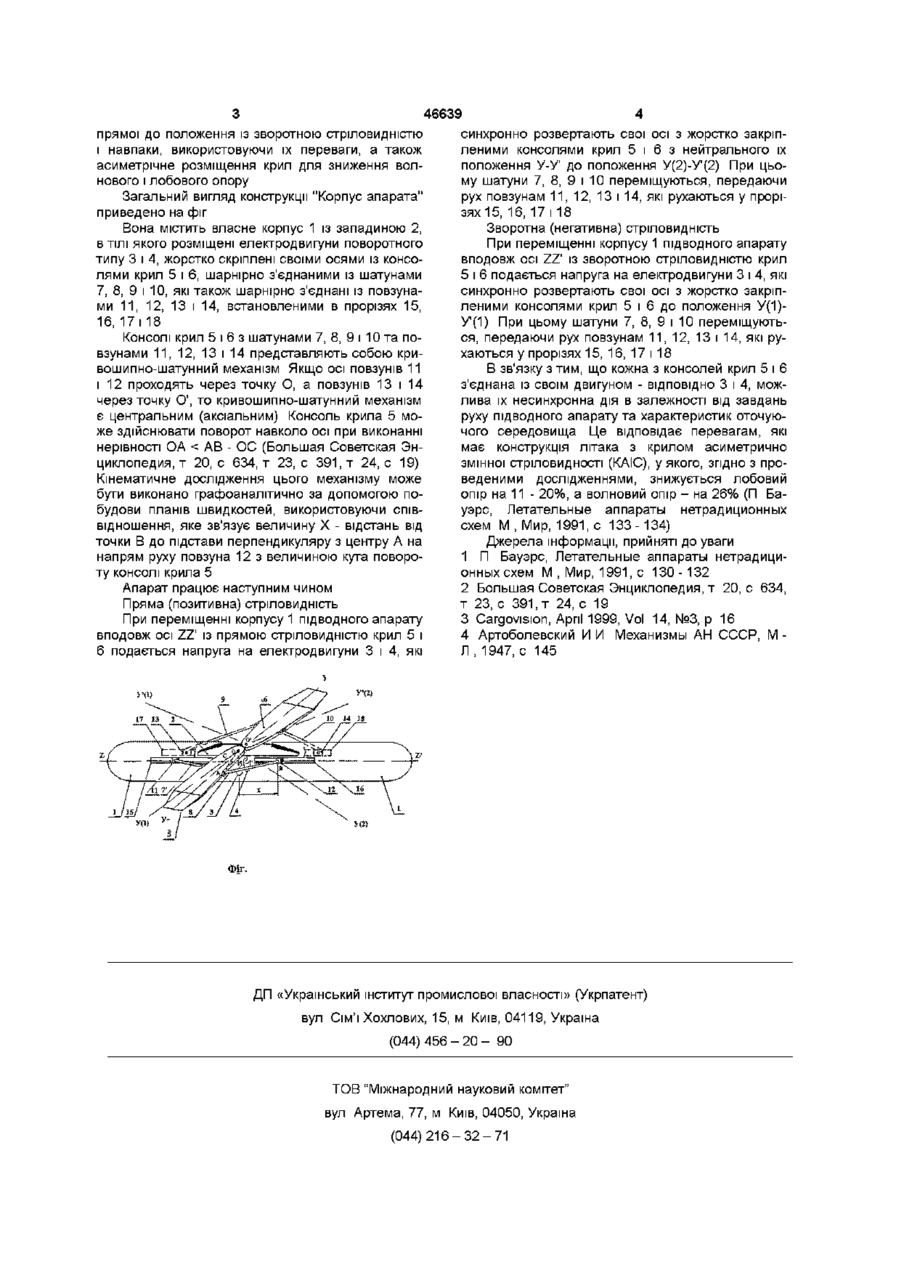
Корпус апарата з встановленими з можливістю переміщення консолями крил, який відрізняється тим, що останні з'єднані з корпусом за допомогою кривошипно-шатунного механізму, причому кожна з консолей послідовно жорстко скріплена з ВІДПОВІДНОЮ віссю електродвигуна, розміщеного в корпусі з можливістю и несинхронного переміщення Винахід відноситься до галузі суднобудування і може бути використаний при проектуванні, розробці та створенні підводних апаратів багатоцільового призначення В техніці ВІДОМІ конструкції корпусів підводних апаратів (Украинская Советская Энциклопедия, К 1982, т 8, с 325 - 326, т 9, с 216) ВІДОМІ також літаки із стріловидними крилами Стріловидні крила прямої і зворотної стріловидності використовуються для затягування початку хвильової кризи при польоті з великими швидкостями При ЗМІНІ конфігурації крила від мінімальної стріловидності до максимальної розмах крила і відносна товщина профілю зменшуються, із-за чого змінюються і характеристики крила В зв'язку з тим, що консоль крила представляє собою жорстку конструкцію, змінюється відношення товщини профілю до величини хорди, побудованій за направленням вітрового потоку, що в свою чергу приводить до зміни аеродинамічних якостей крила До літаків прямої (позитивної) стріловидності відносяться F-86 Сейбр фірми Норт Амерікен, F9F2 Пантера і F9F6/8 Кугуар фірми Грумман, Стратоджет фірми Боїнг та ІНШІ Літаки зворотної (негативної) стріловидності представлені конструкціями Ju 287, Ju 287 U-1 фірми Юнкере, HFB-320, Х-29 фірми Грумман Переваги літаків зворотної (негативної) стріловидності полягають у збільшенні допустимих кутів атаки і кутової швидкості розвороту, зниженні лобового опору, покращанні літальних характеристик на невеликих швидкостях льоту, що пояснюється відсутністю зриву потоку з кінцевих частин крила у порівнянні з крилом прямої (позитивної) стріловидності за рахунок переміщення повітряного потоку від кінцевих частин крила до корневих ВІДОМІ також апарати з тандемними крилами, в яких закінцівки з'єднані між собою літаки Бена Брауна, Локхід Мартін (Cargovision, April 1999, Vol 14, №3, р 16) Найбільш близькими по технічній суті до запропонованого винаходу "Корпус апарата" є конструкції літаків F-111A фірми Дженерал Дайнемікс та F-111B фірми Грумман Вони представляють собою конструкції із змінною стріловидністю, в яких кожна з консолей крила встановлюється в рухомому шарнірному з'єднанні на фюзеляжі і може механічно переміщатись із положення, яке відповідає прямому крилу, до положення максимальної стріловидності (П Бауэре, Летательные аппараты нетрадиционных схем М , Мир, 1991, с 130-132) Основним недоліком цих розробок є зміщення аеродинамічного фокусу при ЗМІНІ стріловидності, що приводить до збільшення балансировочного опору Задачею нинішнього винаходу є підвищення маневрених якостей підводного апарату Поставлена задача вирішується за рахунок того, що в корпусі апарату, з можливістю їх переміщення, розміщені консолі крил, жорстко скріплені з осями електродвигунів, розміщених в корпусі, і шарнірно з'єднаними із шатунами, також шарнірно з'єднаними із повзунами, розташованими в прорізях корпусу Така конструкція підводного апарату дозволяє при виборі режиму його руху та ЗМІНІ характеристик оточуючого середовища отримувати оптимальний план розміщення крил - від положення із со (О (О 46639 прямої до положення із зворотною стріловидністю синхронно розвертають свої осі з жорстко закріпі навпаки, використовуючи їх переваги, а також леними консолями крил 5 і 6 з нейтрального їх асиметрічне розміщення крил для зниження волположення У-У до положення У(2)-У'(2) При цьонового і лобового опору му шатуни 7, 8, 9 і 10 переміщуються, передаючи Загальний вигляд конструкції "Корпус апарата" рух повзунам 11, 12, 13 і 14, які рухаються у проріприведено на фіг зях 15, 16, 17 і 18 Вона містить власне корпус 1 із западиною 2, Зворотна (негативна) стріловидність в ТІЛІ якого розміщені електродвигуни поворотного При переміщенні корпусу 1 підводного апарату типу 3 і 4, жорстко скріплені своїми осями із консовподовж осі ZZ' із зворотною стріловидністю крил лями крил 5 і 6, шарнірно з'єднаними із шатунами 5 і 6 подається напруга на електродвигуни 3 і 4, які 7, 8, 9 і 10, які також шарнірно з'єднані із повзунасинхронно розвертають свої осі з жорстко закріпми 11, 12, 13 і 14, встановленими в прорізях 15, леними консолями крил 5 і 6 до положення У(1)16, 17і 18 У'(1) При цьому шатуни 7, 8, 9 і 10 переміщуються, передаючи рух повзунам 11, 12, 13 і 14, які руКонсолі крил 5 і 6 з шатунами 7, 8, 9 і 10 та похаються у прорізях 15, 16, 17 і 18 взунами 11, 12, 13 і 14 представляють собою кривошипно-шатунний механізм Якщо осі повзунів 11 В зв'язку з тим, що кожна з консолей крил 5 і 6 і 12 проходять через точку О, а повзунів 13 і 14 з'єднана із своїм двигуном - ВІДПОВІДНО 3 і 4, можчерез точку О', то кривошипно-шатунний механізм лива їх несинхронна дія в залежності від завдань є центральним (аксіальним) Консоль крила 5 моруху підводного апарату та характеристик оточуюже здійснювати поворот навколо осі при виконанні чого середовища Це відповідає перевагам, які нерівності ОА < АВ - ОС (Большая Советская Энмає конструкція літака з крилом асиметрично циклопедия, т 20, с 634, т 23, с 391, т 24, с 19) змінної стріловидності (КАІС), у якого, згідно з проКінематичне дослідження цього механізму може веденими дослідженнями, знижується лобовий бути виконано графоаналітично за допомогою поопір на 11 - 20%, а волновий опір - на 26% (П Бабудови планів швидкостей, використовуючи співуэре, Летательные аппараты нетрадиционных відношення, яке зв'язує величину X - відстань від схем М , Мир, 1991, с 133-134) точки В до підстави перпендикуляру з центру А на Джерела інформації, прийняті до уваги напрям руху повзуна 12 з величиною кута поворо1 П Бауэре, Летательные аппараты нетрадициту консолі крила 5 онных схем М , Мир, 1991, с 130-132 Апарат працює наступним чином 2 Большая Советская Энциклопедия, т 20, с 634, т 23, с 391, т 24, с 19 Пряма (позитивна) стріловидність При переміщенні корпусу 1 підводного апарату 3 Cargovision, April 1999, Vol 14, №3, р 16 вподовж осі ZZ' із прямою стріловидністю крил 5 і 4 Артоболевский И И Механизмы АН СССР, М 6 подається напруга на електродвигуни 3 і 4, які Л , 1947, с 145 ї"(ї) Фіг. ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044) 456 - 20 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Автори англійськоюPolischuk Serhii Volodymyrovych, Babenko Viktor Vitaliiovych
Автори російськоюПолищук Сергей Владимирович, Бабенко Виктор Витальевич
МПК / Мітки
МПК: B63H 23/00, B63B 3/13
Код посилання
<a href="https://ua.patents.su/2-46639-korpus-aparata.html" target="_blank" rel="follow" title="База патентів України">Корпус апарата</a>
Корпус апарата
Номер патенту: 46638
Опубліковано: 15.05.2002
Автори: Бабенко Віктор Віталійович, Поліщук Сергій Володимирович
МПК: B63B 3/13, B63H 23/00
Формула / Реферат:
Корпус апарата з нерухомими нижніми крилами і рухомими верхніми крилами, який відрізняється тим, що рухомі верхні крила встановлені з можливістю їх переміщення у виїмці корпусу апарата, в якому, як і у тілі нижніх крил, розміщені електродвигуни поворотного типу, на осях яких жорстко закріплені тяги, шарнірно з'єднані з верхніми рухомими крилами.
Корпус апарата
Номер патенту: 29634
Опубліковано: 15.11.2000
Автори: Поліщук Сергій Володимирович, Коробов Віталій Ілліч, Бабенко Віктор Вітальович
Текст:
...с повернутыми (по часовой стрелке) на угол менее 90° верхним и на угол более 90° нижним поворотно-скользящими крыльями относительно продольной оси подводного аппарата. Устройство содержит собственно корпус 1 подводного управляемого аппарата с встроенными в нем электродвигателями поворотного типа 2 и 3, вертикально расположенные выходные оси которых соответственно 4 и 5 соединены с верхним 6 и нижним 7 поворотно-скользящими крыльями с...
Корпус плуга
Номер патенту: 44160
Опубліковано: 15.01.2002
Автори: Тищенко Сергій Сергійович, Тищенко Олег Сергійович
МПК: A01B 15/00
Формула / Реферат:
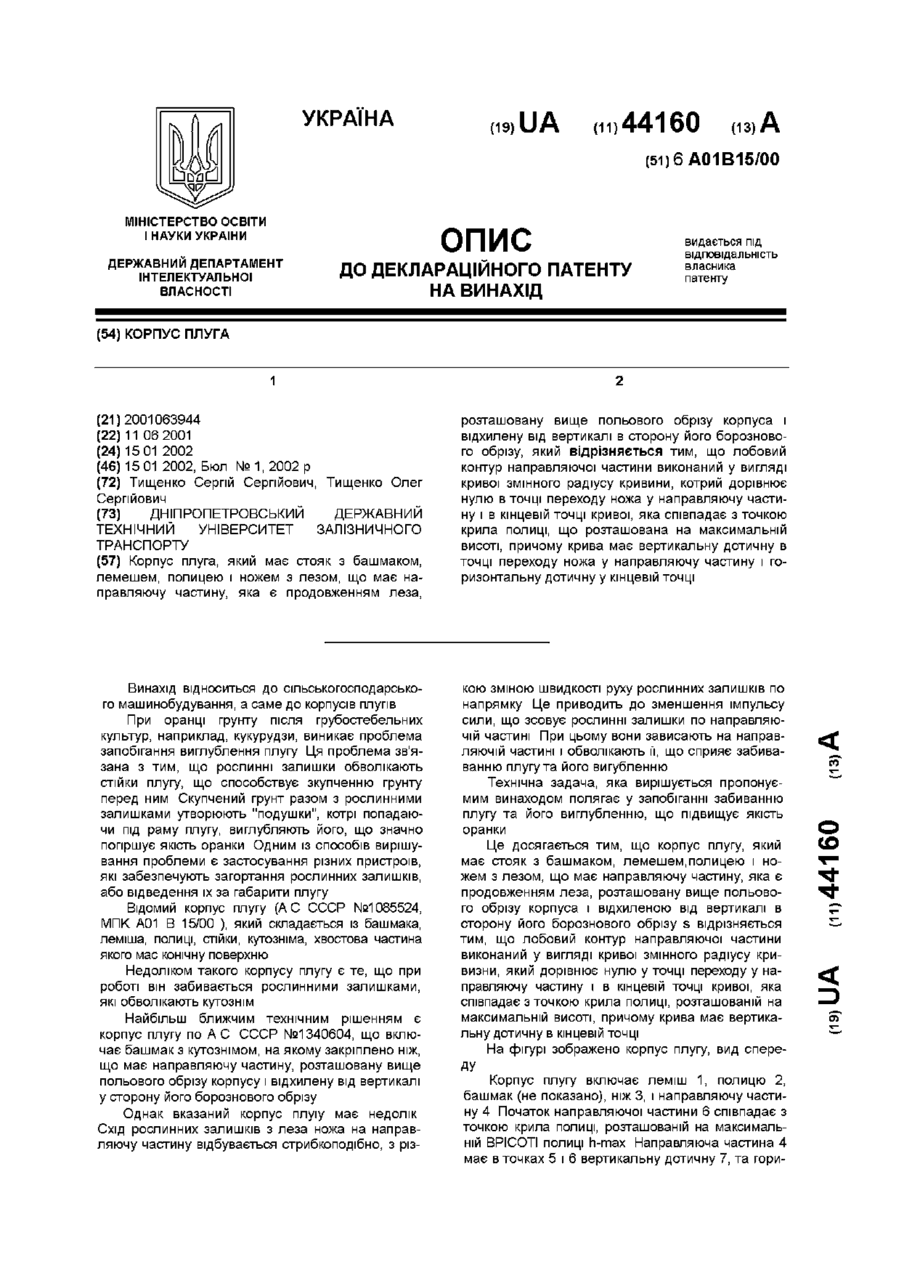
Корпус плуга, який має стояк з башмаком, лемешем, полицею і ножем з лезом, що має направляючу частину, яка є продовженням леза, розташовану вище польового обрізу корпуса і відхилену від вертикалі в сторону його борознового обрізу, який відрізняється тим, що лобовий контур направляючої частини виконаний у вигляді кривої змінного радіусу кривини, котрий дорівнює нулю в точці переходу ножа у направляючу частину і в кінцевій точці кривої, яка...
Підводний апарат з плавцевим рушієм
Номер патенту: 41616
Опубліковано: 17.09.2001
Автори: Бабенко Віктор Віталійович, Мартиненко Іван Іванович, Мороз Володимир Василійович, Поліщук Сергій Володимирович, Коробов Віталій Ілліч
Мітки: рушієм, підводний, плавцевим, апарат
Формула / Реферат:
Підводний апарат з плавцевим рушієм, в носовій і кормовій частинах якого розміщені електродвигуни, який відрізняється тим, що на вихідному валу електродвигуна, розміщеного в носовій частині підводного апарату, закріплений з можливістю його повороту на 180° кронштейн з поперечкою, на обох боках якої встановлені крила, а в прорізу кормової частини є кронштейн з електродвигуном, на осі якого закріплено стебло з плавцевим рушієм.
Рушій літальних апаратів “дракон”
Номер патенту: 38115
Опубліковано: 15.05.2001
Автори: Зуєв Микола Григорович, Титаренко Олександр Михайлович, Джелалі Олександр Володимирович
МПК: B64D 27/00, B64C 29/00
Мітки: дракон, апаратів, літальних, рушій
Формула / Реферат:
(21) 2000053083 Дата прийняття(54) (57) рішення 27.09.2000 р.Рушій літальних апаратів, який складається з двох каркасів крил з шарнірно прикріпленими до них з нижнього боку...
Попередній патент: Корпус апарата
Наступний патент: Спосіб діагностики стану кісткової тканини
Випадковий патент: Спосіб одержання сироватки проти сальмонельозів та інфекційного ринотрахеїту телят