Корпус апарата
Номер патенту: 50589
Опубліковано: 15.10.2002
Автори: Бабенко Віктор Віталійович, Поліщук Сергій Володимирович
Формула / Реферат
Корпус апарата, що має крила, які рознесені по висоті і горизонталі, який відрізняється тим, що крила встановлені на корпусі з можливістю їх пересування в горизонтальній площині, при цьому кожне з крил жорстко з'єднане з відповідною тягою з поперечиною, яка входить в обойму, а кінцеві частини тяг з'єднані з ланками ланцюгових передач, що провертаються на зубчатих колесах, закріплених на осях електродвигунів поворотного типу.
Текст
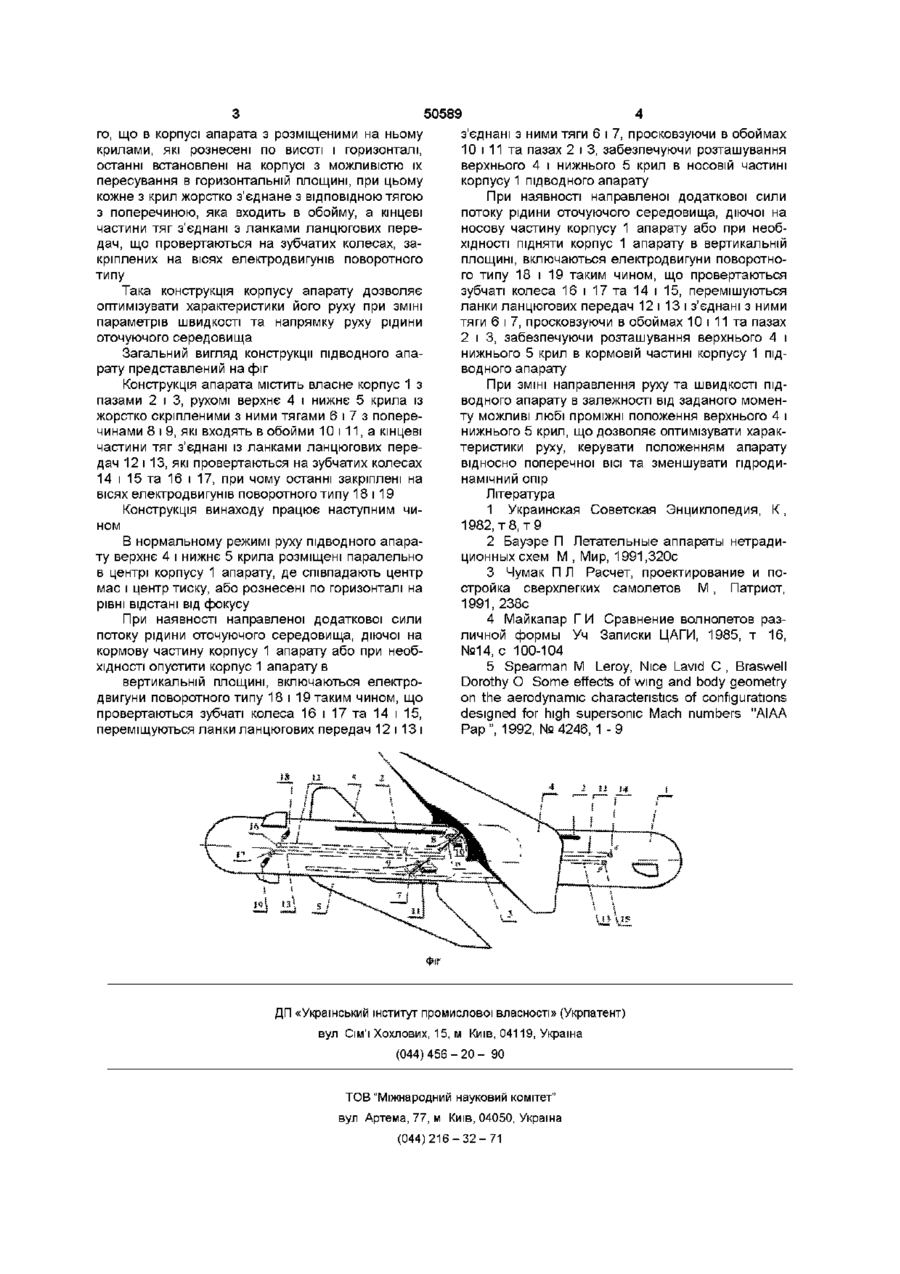
Корпус апарата, що має крила, які рознесені по висоті і горизонталі, який відрізняється тим, що крила встановлені на корпусі з можливістю їх пересування в горизонтальній площині, при цьому кожне з крил жорстко з'єднане з ВІДПОВІДНОЮ тягою з поперечиною, яка входить в обойму, а кінцеві частини тяг з'єднані з ланками ланцюгових передач, що провертаються на зубчатих колесах, закріплених на осях електродвигунів поворотного типу Винахід відноситься до галузі суднобудування і може бути використаний при створенні підводних апаратів багатоцільового призначення В техніці ВІДОМІ конструкції корпусів підводних апаратів (Украинская Советская Энциклопедия, К 1982, т 8, с 325-326, т 9, С 216) ВІДОМІ також конструкції літаків з тандемними крилами БІЛЬШІСТЬ таких літаків мають два крила, які встановлюються на протилежних кінцях фюзеляжу Кожне з цих крил створює половину аеродинамічної сили Перевагами літаків з тандемними крилами є можливість отримання більшої площі несучої поверхні, ніж у випадку використання одного крила на літаку тієї ж геометричної розмірності (в межах того ж розмаху крила і довжини фюзеляжу) При використанні крил схеми "тандем" набагато легше отримати задану площу крила при невеликому розмаху без необхідності переборювати конструктивні складності та знижувати опір інтерференції, притаманний для біпланних систем Літак "Пу дю сьєль" Анрі Меньє, побудований у Франції в 1934 році, представляв собою тандемний моноплан, в якому переднє крило розміщувалось вище заднього В літаку "Дуо-Моно" М Деланне (1937р) використана ідея того, що вертикальний зазор між крилами сприяє покращанню обтікання заднього крила і усуває небезпеку штопору для літака До такого ж класу літаків відносяться літаки "Лайсендер" фірми "Уестленд" (1941 р ), "КВІКІ" фірми "Уестленд" (1977р ) Однією ІЗ ВИМОГ при розробці роботизованих літальних апаратів є забезпечення компактності при мінімальному рівні аеродинамічного опору і інтеграційного впливу при маневруванні із значними перевантаженнями (Роботизированный летательный апарат класса воздух-воздух ЭЙ Авиастроение, 1992, №15, р 101, с Л 5-29) Найбільш близьким за технічною суттю до запропонованого винаходу є літак-амфібія схеми "тандем" Уїльяма Б Стаута, побудований у 1927 році в США (П Бауэре Летательные аппараты нетрадиционных схем М, Мир, 1991, с 48), в я кому передне крило з розміщеними на ньому по всьому розмаху елеронами, встановлювалось на дуже коротких підкосах безпосередньо перед кабіною, а заднє крило з рулями висоти, також розміщеними по всьому його розмаху, знаходилось ззаду кабіни В цій компоновці був реалізований принцип, який давав значну перевагу крилам схеми "тандем" із-за того, що переднє крило було розміщено значно нижче заднього, завдяки чому останнє обтікалось незбуреним потоком Основними недоліками вище представленої схеми є підвищення маси планеру, аеродинамічного опору і моменту інерції Характерною проблемою є також значна зміна центру тиску при ЗМІНІ кута атаки, більш високий у порівнянні із звичайними схемами момент інерції в каналі тангажу при русі відносно поперечної ВІСІ літака Збільшується балансировочный опір, а витрати на балансировку знижують ШВИДКІСНІ характеристики Задачею нинішнього винаходу є оптимізація руху підводного апарату в залежності від характеристик оточуючого середовища Поставлена задача вирішується за рахунок то 00 ю о ю 50589 го, що в корпусі апарата з розміщеними на ньому крилами, які рознесені по висоті і горизонталі, останні встановлені на корпусі з можливістю їх пересування в горизонтальній площині, при цьому кожне з крил жорстко з'єднане з ВІДПОВІДНОЮ тягою з поперечиною, яка входить в обойму, а кінцеві частини тяг з'єднані з ланками ланцюгових передач, що провертаються на зубчатих колесах, закріплених на вісях електродвигунів поворотного типу Така конструкція корпусу апарату дозволяє оптимізувати характеристики його руху при ЗМІНІ параметрів швидкості та напрямку руху рідини оточуючого середовища Загальний вигляд конструкції підводного апарату представлений на фіг Конструкція апарата містить власне корпус 1 з пазами 2 і 3, рухомі верхнє 4 і нижнє 5 крила із жорстко скріпленими з ними тягами 6 і 7 з поперечинами 8 і 9, які входять в обойми 10 і 1 1 , а кінцеві частини тяг з'єднані із ланками ланцюгових передач 12 і 13, які провертаються на зубчатих колесах 14 і 15 та 16 і 17, при чому останні закріплені на вісях електродвигунів поворотного типу 18 і 19 Конструкція винаходу працює наступним чином В нормальному режимі руху підводного апарату верхнє 4 і нижнє 5 крила розміщені паралельно в центрі корпусу 1 апарату, де співпадають центр мас і центр тиску, або рознесені по горизонталі на рівні відстані від фокусу При наявності направленої додаткової сили потоку рідини оточуючого середовища, діючої на кормову частину корпусу 1 апарату або при необхідності опустити корпус 1 апарату в вертикальній площині, включаються електродвигуни поворотного типу 18 і 19 таким чином, що провертаються зубчаті колеса 16 і 17 та 14 і 15, переміщуються ланки ланцюгових передач 12 і 13 і з'єднані з ними тяги 6 і 7, просковзуючи в обоймах 10 і 11 та пазах 2 і 3, забезпечуючи розташування верхнього 4 і нижнього 5 крил в носовій частині корпусу 1 підводного апарату При наявності направленої додаткової сили потоку рідини оточуючого середовища, діючої на носову частину корпусу 1 апарату або при необхідності підняти корпус 1 апарату в вертикальній площині, включаються електродвигуни поворотного типу 18 і 19 таким чином, що провертаються зубчаті колеса 16 і 17 та 14 і 15, перемішуються ланки ланцюгових передач 12 і 13 і з'єднані з ними тяги 6 і 7, просковзуючи в обоймах 10 і 11 та пазах 2 і 3, забезпечуючи розташування верхнього 4 і нижнього 5 крил в кормовій частині корпусу 1 підводного апарату При ЗМІНІ направлення руху та швидкості підводного апарату в залежності від заданого моменту можливі любі проміжні положення верхнього 4 і нижнього 5 крил, що дозволяє оптимізувати характеристики руху, керувати положенням апарату відносно поперечної ВІСІ та зменшувати гідродинамічний опір Література 1 Украинская Советская Энциклопедия, К, 1982, т 8, т 9 2 Бауэре П Летательные аппараты нетрадиционных схем М , Мир, 1991,320с 3 Чумак П Л Расчет, проектирование и постройка сверхлегких самолетов М , Патриот, 1991, 238с 4 Майкапар Г И Сравнение волнолетов различной формы Уч Записки ЦАГИ, 1985, т 16, №14, с 100-104 5 Spearman М Leroy, Nice Lavid С , Braswell Dorothy O Some effects of wing and body geometry on the aerodynamic characteristics of configurations designed for high supersonic Mach numbers "AIAA Pap", 1992, №4246, 1 -9 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюApparatus hull
Автори англійськоюPolischuk Serhii Volodymyrovych, Babenko Viktor Vitaliiovych
Назва патенту російськоюКорпус аппарата
Автори російськоюПолищук Сергей Владимирович, Бабенко Виктор Витальевич
МПК / Мітки
Код посилання
<a href="https://ua.patents.su/2-50589-korpus-aparata.html" target="_blank" rel="follow" title="База патентів України">Корпус апарата</a>
Корпус апарата
Номер патенту: 46638
Опубліковано: 15.05.2002
Автори: Бабенко Віктор Віталійович, Поліщук Сергій Володимирович
МПК: B63B 3/13, B63H 23/00
Формула / Реферат:
Корпус апарата з нерухомими нижніми крилами і рухомими верхніми крилами, який відрізняється тим, що рухомі верхні крила встановлені з можливістю їх переміщення у виїмці корпусу апарата, в якому, як і у тілі нижніх крил, розміщені електродвигуни поворотного типу, на осях яких жорстко закріплені тяги, шарнірно з'єднані з верхніми рухомими крилами.
Корпус апарата
Номер патенту: 46639
Опубліковано: 15.05.2002
Автори: Бабенко Віктор Віталійович, Поліщук Сергій Володимирович
МПК: B63B 3/13, B63H 23/00
Формула / Реферат:
Корпус апарата з встановленими з можливістю переміщення консолями крил, який відрізняється тим, що останні з’єднані з корпусом за допомогою кривошипно-шатунного механізму, причому кожна з консолей послідовно жорстко скріплена з відповідною віссю електродвигуна, розміщеного в корпусі з можливістю її несинхронного переміщення.
Корпус апарата
Номер патенту: 29634
Опубліковано: 15.11.2000
Автори: Бабенко Віктор Вітальович, Коробов Віталій Ілліч, Поліщук Сергій Володимирович
Текст:
...с повернутыми (по часовой стрелке) на угол менее 90° верхним и на угол более 90° нижним поворотно-скользящими крыльями относительно продольной оси подводного аппарата. Устройство содержит собственно корпус 1 подводного управляемого аппарата с встроенными в нем электродвигателями поворотного типа 2 и 3, вертикально расположенные выходные оси которых соответственно 4 и 5 соединены с верхним 6 и нижним 7 поворотно-скользящими крыльями с...
Підводний апарат з плавцевим рушієм
Номер патенту: 41616
Опубліковано: 17.09.2001
Автори: Коробов Віталій Ілліч, Поліщук Сергій Володимирович, Мороз Володимир Василійович, Бабенко Віктор Віталійович, Мартиненко Іван Іванович
Мітки: підводний, плавцевим, апарат, рушієм
Формула / Реферат:
Підводний апарат з плавцевим рушієм, в носовій і кормовій частинах якого розміщені електродвигуни, який відрізняється тим, що на вихідному валу електродвигуна, розміщеного в носовій частині підводного апарату, закріплений з можливістю його повороту на 180° кронштейн з поперечкою, на обох боках якої встановлені крила, а в прорізу кормової частини є кронштейн з електродвигуном, на осі якого закріплено стебло з плавцевим рушієм.
Корпус плуга
Номер патенту: 44160
Опубліковано: 15.01.2002
Автори: Тищенко Олег Сергійович, Тищенко Сергій Сергійович
МПК: A01B 15/00
Формула / Реферат:
Корпус плуга, який має стояк з башмаком, лемешем, полицею і ножем з лезом, що має направляючу частину, яка є продовженням леза, розташовану вище польового обрізу корпуса і відхилену від вертикалі в сторону його борознового обрізу, який відрізняється тим, що лобовий контур направляючої частини виконаний у вигляді кривої змінного радіусу кривини, котрий дорівнює нулю в точці переходу ножа у направляючу частину і в кінцевій точці кривої, яка...
Попередній патент: Спосіб уніфікації зовнішніх режимних параметрів процесу формування та заряду акумуляторних батарей при їх потоковому виробництві
Наступний патент: Спосіб підготовки вугільної шихти до коксування
Випадковий патент: Спосіб одержання керамічного порошку