Привід махаючого крила
Формула / Реферат
Привід махаючого крила, який складається з корпуса, редуктора, кривошипа і коромисел, який відрізняється тим, що в привід введено повідковий механізм із пружними вилками, а кривошипо-шатунний механізм перетворений у кулісно-сферичний механізм.
Текст
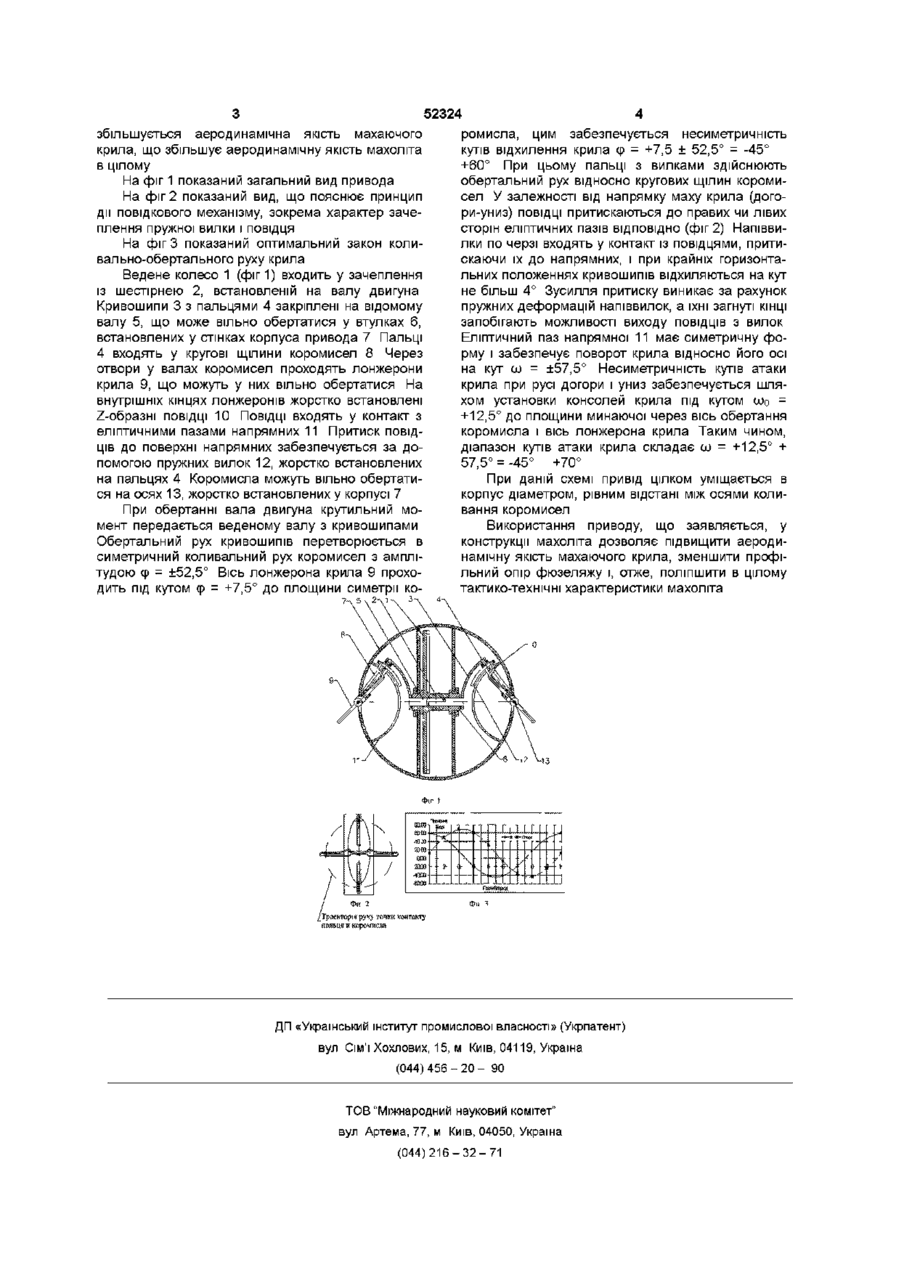
Привід махаючого крила, який складається з корпуса, редуктора, кривошипа і коромисел, який відрізняється тим, що в привід введено повідковий механізм із пружними вилками, а кривошипошатунний механізм перетворений у кулісносферичний механізм швидкістю руху крил і можуть бути асиметричні для лівої і правої консолей, у залежності від дії ЗОВНІШНІХ сил Такий привод не забезпечує оптимальний закон руху цільномахаючого крила, що знижує аеродинамічну якість махаючого крила і махоліта в цілому 2 Привод має відносно велику площу поперечного переріза, що збільшує його профільний опір Габарит привода у вертикальній площині не може бути менше суми діаметра кривошипа і діаметра окружності, що описана внутрішніми кінцями коромисел В основу винаходу поставлена задача підвищення аеродинамічної якості махаючого крила за рахунок створення привода махаючого крила мінімальних габаритів, закон руху якого максимально наближений до оптимального Під оптимальним законом тут розуміється отриманий шляхом розшифровки відеозапису закон коливальнообертального руху крила птаха з розмахом крил, рівним розмаху крила запропонованого прототипу (фігЗ) Поставлена задача вирішується тим, що ВІДПОВІДНО до винаходу, у привод махаючого крила, що складається з корпуса, редуктора, кривошипа і коромисел, для дотримання бажаного закону зміни кутів установки консолей крила у залежності від кутового положення і напрямку руху коромисел, введено повідковий механізм із пружними вилками, а кривошипо-шатунний механізм перетворений у кулісно-сферичний механізм За рахунок перетворення кривошипошатунного механізму в кулісно-сферичний знижуються габарити привода, за рахунок введення в привод повідкового механізму з пружними вилками со сч Ю 52324 збільшується аеродинамічна якість махаючого крила, що збільшує аеродинамічну якість махоліта в цілому На фіг 1 показаний загальний вид привода На фіг 2 показаний вид, що пояснює принцип дії повідкового механізму, зокрема характер зачеплення пружної вилки і повідця На фіг 3 показаний оптимальний закон коливально-обертального руху крила Ведене колесо 1 (фіг 1) входить у зачеплення із шестірнею 2, встановленій на валу двигуна Кривошипи 3 з пальцями 4 закріплені на відомому валу 5, що може вільно обертатися у втулках 6, встановлених у стінках корпуса привода 7 Пальці 4 входять у кругові щілини коромисел 8 Через отвори у валах коромисел проходять лонжерони крила 9, що можуть у них вільно обертатися На внутрішніх кінцях лонжеронів жорстко встановлені Z-образні ПОВІДЦІ 10 ПОВІДЦІ ВХОДЯТЬ у контакт з еліптичними пазами напрямних 11 Притиск ПОВІДЦІВ до поверхні напрямних забезпечується за допомогою пружних вилок 12, жорстко встановлених на пальцях 4 Коромисла можуть вільно обертатися на осях 13, жорстко встановлених у корпусі 7 При обертанні вала двигуна крутильний момент передається веденому валу з кривошипами Обертальний рух кривошипів перетворюється в симетричний коливальний рух коромисел з амплітудою е = ±52,5° Вісь лонжерона крила 9 прохор дить під кутом е = +7,5° до площини симетрії кор 7~,5. 2 ромисла, цим забезпечується несиметричність кутів відхилення крила е = +7,5 ± 52,5° = -45° р +60° При цьому пальці з вилками здійснюють обертальний рух відносно кругових щілин коромисел У залежності від напрямку маху крила (догори-униз) ПОВІДЦІ притискаються до правих чи лівих сторін еліптичних пазів ВІДПОВІДНО (фіг 2) Напіввилки по черзі входять у контакт із повідцями, притискаючи їх до напрямних, і при крайніх горизонтальних положеннях кривошипів відхиляються на кут не більш 4° Зусилля притиску виникає за рахунок пружних деформацій напіввилок, а їхні загнуті КІНЦІ запобігають можливості виходу ПОВІДЦІВ З ВИЛОК ЕЛІПТИЧНИЙ паз напрямної 11 має симетричну форму і забезпечує поворот крила відносно його осі на кут ш = ±57,5° Несиметричність кутів атаки крила при русі догори і униз забезпечується шляхом установки консолей крила під кутом шо = +12,5° до площини минаючої через вісь обертання коромисла і вісь лонжерона крила Таким чином, діапазон кутів атаки крила складає ш = +12,5° + 57,5° = -45° +70° При даній схемі привід цілком уміщається в корпус діаметром, рівним відстані між осями коливання коромисел Використання приводу, що заявляється, у конструкції махоліта дозволяє підвищити аеродинамічну якість махаючого крила, зменшити профільний опір фюзеляжу і, отже, поліпшити в цілому тактико-технічні характеристики махоліта ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюSwing wing drive
Назва патенту російськоюПривод машущего крыла
МПК / Мітки
МПК: B64C 33/00
Мітки: привід, крила, махаючого
Код посилання
<a href="https://ua.patents.su/2-52324-privid-makhayuchogo-krila.html" target="_blank" rel="follow" title="База патентів України">Привід махаючого крила</a>
Спосіб усунення дефекта крила носа
Номер патенту: 37628
Опубліковано: 15.05.2001
Автор: Довбиш Ніна Олександрівна
МПК: A61B 17/00
Мітки: носа, усунення, дефекта, крила, спосіб
Текст:
...приклад. Хвора Ш.О., 25 років, поступила в клініку КМІ в зв'язку з крайовим повношаровим дефектом правого крила носа (IX № 850). 17.10.1991 p. проведена пластика правого крила носа запропонованим способом: шкірній покрив крила сформований шляхом виверту шкірного клаптю з внутрішньої поверхні оперованої ніздрі, а слизова та крильний хрящ заміщений слизово-хрящевим залежним клаптем, що взятий з протилежного носового ходу в ділянці...
Спосіб відновлення крила носа
Номер патенту: 37630
Опубліковано: 15.05.2001
Автори: Довбиш Ніна Олександрівна, Возний Федір Федорович
МПК: A61B 17/00
Мітки: спосіб, носа, відновлення, крила
Текст:
...атрофії правого крильного хряща, западіння правого крила носа, звуження правого носового хода. 23.07.1991 p. проведена пластика правого крила носа ендоназальним доступом з формуванням хрящо-жирового клаптя з оперуємого крила носа, кінець якого введений в сформо вану підшкірну кишеню в латеральному відділі крила носа й фіксований до нього внакладку поліамідним швом. Рана оброблена стрептоцидом й зашита. В результаті операції: 1)...
Форма в плані крила великого звуження літака

Номер патенту: 45535
Опубліковано: 15.04.2002
Автор: Моргун Олександр Павлович
МПК: B64C 3/10
Мітки: великого, форма, літака, крила, плані, звуження
Формула / Реферат:
Форма в плані крила великого звуження літака з передньою кромкою (наприклад еліптичної форми) і кореневою хордою, яка відрізняється тим, що задня кромка крила виконана у вигляді ломаної лінії, одна половина відрізків якої паралельна, а друга половина - перпендикулярна напрямку польоту літака, на відрізках ломаної лінії, паралельних напрямку польоту літака, установлені кінцеві шайби.
Привід верстату
Номер патенту: 34966
Опубліковано: 15.03.2001
Автори: Пестунов Володимир Михайлович, Кириченко Андрій Миколайович, Крижанівський Володимир Андрійович
МПК: B23B 47/00, B23Q 37/00
Формула / Реферат:
1. Привід верстату, що містить силовий стіл із встановленою на ньому багатошпиндельною револьверною головкою та розташованою в ланцюгу головного руху гвинтовою несамогальмівною передачею, зв'язаною з механізмом подачі, який відрізняється тим, що гвинтові передачі кінематичного ланцюга головного руху та подачі розташовані паралельно та охоплюють робочий шпиндель револьверної головки, а гвинтова передача привода головного руху споряджена...
Привід каретки плосков`язальної машини
Номер патенту: 24899
Опубліковано: 15.11.2002
Автори: Яковлев Юрій Олександрович, Піпа Борис Федорович, Хомяк Олег Миколайович
МПК: D04B 15/96
Мітки: каретки, машини, плосков`язальної, привід
Формула / Реферат:
Привод каретки плосковязальной машины, содержащий электродвигатель, ременную передачу, зубчатую передачу, кривошипно-ползунный механизм, включающий кривошип с пальцем, шатун и каретку, счетный механизм и тормозное устройство, отличающийся тем, что зубчатая передача выполнена в виде ведущего и ведомого зубчатых колес некруглой формы, имеющих одинаковые длины начальных центроид и передаточное число i изменяющееся за цикл вращения от шатуна, r...
Попередній патент: Канюля-шпатель
Наступний патент: Засувка запірна для трубопроводів
Випадковий патент: Перетворювач постійної напруги