Пристрій для керування космічним апаратом
Номер патенту: 55358
Опубліковано: 10.12.2010
Автори: Семука Олександр Григорович, Фірсов Сергій Миколайович, Кописов Олег Едуардович, Кулік Анатолій Степанович, Слєкішин Сергій Євгенович
Формула / Реферат
Пристрій для керування космічним апаратом, що містить цифровий керуючий обчислювач, перший та другий виходи якого під'єднані до першого та другого цифро-аналогових перетворювачів, послідовно з'єднаних з першими та другими відповідно підсилювачами потужності та двигунами-маховиками, кожен з яких містить електричний привід, маховик та датчик обертів, при цьому виходи двох двигунів-маховиків під'єднані до першого та другого входів аналого-цифрового перетворювача, вихід аналого-цифрового перетворювача під'єднаний до цифрового керуючого обчислювача, який відрізняється тим, що він додатково містить третій, четвертий, п'ятий та шостий цифро-аналогові перетворювачі, входи яких під'єднані до третього, четвертого, п'ятого та шостого виходів цифрового керуючого обчислювача, третій, четвертий, п'ятий та шостий підсилювачі потужності, входи яких під'єднані до третього, четвертого, п'ятого та шостого цифро-аналогових перетворювачів, третій, четвертий, п'ятий та шостий двигуни-маховики, входи яких під'єднані до виходів третього, четвертого, п'ятого та шостого підсилювачів потужності відповідно, а виходи під'єднані до третього, четвертого, п'ятого та шостого входів аналого-цифрового перетворювача.
Текст
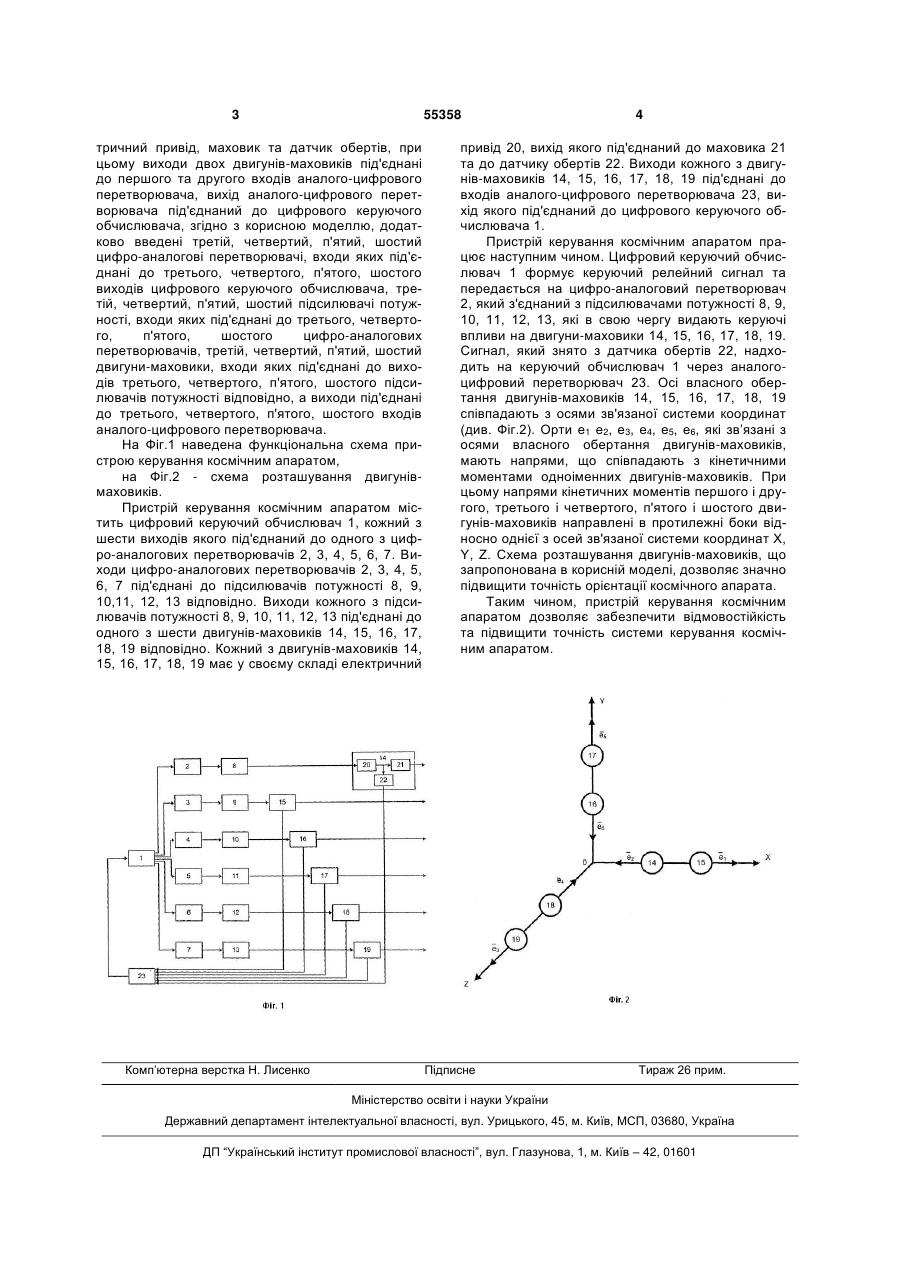
Пристрій для керування космічним апаратом, що містить цифровий керуючий обчислювач, перший та другий виходи якого під'єднані до першого та другого цифро-аналогових перетворювачів, послідовно з'єднаних з першими та другими відповідно підсилювачами потужності та двигунамимаховиками, кожен з яких містить електричний привід, маховик та датчик обертів, при цьому ви 3 55358 тричний привід, маховик та датчик обертів, при цьому виходи двох двигунів-маховиків під'єднані до першого та другого входів аналого-цифрового перетворювача, вихід аналого-цифрового перетворювача під'єднаний до цифрового керуючого обчислювача, згідно з корисною моделлю, додатково введені третій, четвертий, п'ятий, шостий цифро-аналогові перетворювачі, входи яких під'єднані до третього, четвертого, п'ятого, шостого виходів цифрового керуючого обчислювача, третій, четвертий, п'ятий, шостий підсилювачі потужності, входи яких під'єднані до третього, четвертого, п'ятого, шостого цифро-аналогових перетворювачів, третій, четвертий, п'ятий, шостий двигуни-маховики, входи яких під'єднані до виходів третього, четвертого, п'ятого, шостого підсилювачів потужності відповідно, а виходи під'єднані до третього, четвертого, п'ятого, шостого входів аналого-цифрового перетворювача. На Фіг.1 наведена функціональна схема пристрою керування космічним апаратом, на Фіг.2 - схема розташування двигунівмаховиків. Пристрій керування космічним апаратом містить цифровий керуючий обчислювач 1, кожний з шести виходів якого під'єднаний до одного з цифро-аналогових перетворювачів 2, 3, 4, 5, 6, 7. Виходи цифро-аналогових перетворювачів 2, 3, 4, 5, 6, 7 під'єднані до підсилювачів потужності 8, 9, 10,11, 12, 13 відповідно. Виходи кожного з підсилювачів потужності 8, 9, 10, 11, 12, 13 під'єднані до одного з шести двигунів-маховиків 14, 15, 16, 17, 18, 19 відповідно. Кожний з двигунів-маховиків 14, 15, 16, 17, 18, 19 має у своєму складі електричний Комп’ютерна верстка Н. Лиcенко 4 привід 20, вихід якого під'єднаний до маховика 21 та до датчику обертів 22. Виходи кожного з двигунів-маховиків 14, 15, 16, 17, 18, 19 під'єднані до входів аналого-цифрового перетворювача 23, вихід якого під'єднаний до цифрового керуючого обчислювача 1. Пристрій керування космічним апаратом працює наступним чином. Цифровий керуючий обчислювач 1 формує керуючий релейний сигнал та передається на цифро-аналоговий перетворювач 2, який з'єднаний з підсилювачами потужності 8, 9, 10, 11, 12, 13, які в свою чергу видають керуючі впливи на двигуни-маховики 14, 15, 16, 17, 18, 19. Сигнал, який знято з датчика обертів 22, надходить на керуючий обчислювач 1 через аналогоцифровий перетворювач 23. Осі власного обертання двигунів-маховиків 14, 15, 16, 17, 18, 19 співпадають з осями зв'язаної системи координат (див. Фіг.2). Орти е1 е2, е3, е4, е5, е6, які зв’язані з осями власного обертання двигунів-маховиків, мають напрями, що співпадають з кінетичними моментами одноіменних двигунів-маховиків. При цьому напрями кінетичних моментів першого і другого, третього і четвертого, п'ятого і шостого двигунів-маховиків направлені в протилежні боки відносно однієї з осей зв'язаної системи координат X, Y, Z. Схема розташування двигунів-маховиків, що запропонована в корисній моделі, дозволяє значно підвищити точність орієнтації космічного апарата. Таким чином, пристрій керування космічним апаратом дозволяє забезпечити відмовостійкість та підвищити точність системи керування космічним апаратом. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for controlling spacecraft
Автори англійськоюKulik Anatolii Stepanovych, Firsov Serhii Mykolaiovych, Kopysov Oleh Eduardovych, Sliekishyn Serhii Yevhenovych, Semuka Oleksandr Hryhorovych
Назва патенту російськоюУстройство для управления космическим аппаратом
Автори російськоюКулик Анатолий Степанович, Фирсов Сергей Николаевич, Кописов Олег Эдуардович, Слекишин Сергей Евгеньевич, Семука Александр Григорьевич
МПК / Мітки
МПК: B64G 1/28
Мітки: апаратом, керування, космічним, пристрій
Код посилання
<a href="https://ua.patents.su/2-55358-pristrijj-dlya-keruvannya-kosmichnim-aparatom.html" target="_blank" rel="follow" title="База патентів України">Пристрій для керування космічним апаратом</a>
Пристрій керування космічним апаратом

Номер патенту: 20080
Опубліковано: 15.01.2007
Автори: Фірсов Сергій Миколайович, Дибська Ирина Юріївна, Циганков Євген Васильович, Бандура Іван Миколайович, Царук Катерина Олексіївна
МПК: B64G 1/28
Мітки: керування, апаратом, космічним, пристрій
Формула / Реферат:
Пристрій керування космічним апаратом, що містить перший та другий цифро-аналогові перетворювачі, перший та другий електричні приводи, перший та другий датчики обертів, перший та другий підсилювачі потужності, аналого-цифровий перетворювач, який відрізняється тим, що до нього введені цифровий керуючий обчислювач, перший і другий двигуни-маховики, вихід аналого-цифрового перетворювача разом із вхідним сигналом системи підключений до входів...
Система керування космічним літальним апаратом
Номер патенту: 11982
Опубліковано: 16.01.2006
Автори: Гавриленко Олег Іванович, Ворончук Сергій Петрович
МПК: B64G 1/24
Мітки: система, керування, літальним, космічним, апаратом
Формула / Реферат:
Система керування космічним літальним апаратом, що складається з датчика кута, датчика кутових швидкостей, першого та другого масштабного блоків, послідовно з'єднаних підсилювача потужності, електродвигуна, ротора електродвигуна, тахометра, яка відрізняється тим, що додатково введено мікропроцесорний пристрій, перший і другий вхід якого з'єднані з виходами першого і другого масштабних блоків відповідно, вихід мікропроцесорного блока з'єднаний...
Система керування космічним літальним апаратом
Номер патенту: 18400
Опубліковано: 15.11.2006
Автори: Бандура Іван Миколайович, Малєва Людмила Сергіївна, Гордін Олександр Григорович
МПК: B64G 1/24
Мітки: апаратом, керування, космічним, літальним, система
Формула / Реферат:
Система керування космічним літальним апаратом (КЛА), що містить триступеневий гіроскопічний виконавчий орган, датчики моментів на осях підвісу внутрішньої та зовнішньої рами, датчики кута та кутової швидкості КЛА, виходи яких, через попередні перетворювачі, з'єднані з входами блока керування, перший підсилювач потужності підключений до датчика моменту на осі підвісу зовнішньої рами, яка відрізняється тим, що в неї введені два маховики,...
Система керування космічним літальним апаратом

Номер патенту: 67029
Опубліковано: 15.06.2004
Автори: Батаєв Віктор Олександрович, Овсяннікова Ірина Валеріївна, Бандура Іван Миколайович, Погудін Андрій Володимирович
МПК: B64G 1/24
Мітки: апаратом, система, керування, космічним, літальним
Формула / Реферат:
Система керування космічним літальним апаратом, що містить датчик кута та датчик кутових швидкостей, які з'єднані через перший і другий масштабні блоки з формувачем закону керування, і підсилювач потужності, яка відрізняється тим, що в неї введені послідовно включені інтегратор, порівнюючий пристрій, з'єднаний через підсилювач потужності з ротором електродвигуна, на роторі встановлений тахометр, який з'єднаний з другим входом порівнюючого...
Відмовостійка система керування літальним апаратом
Номер патенту: 36472
Опубліковано: 27.10.2008
Автор: Кулік Анатолій Степанович
МПК: G05D 1/10
Мітки: апаратом, керування, літальним, система, відмовостійка
Формула / Реферат:
Відмовостійка система керування літальним апаратом, що має аналого-цифровий перетворювач, бортову обчислювальну машину, цифро-аналоговий перетворювач, причому виходи аналого-цифрового перетворювача з'єднані з входами бортової цифрової обчислювальної машини, виходи якої з'єднані з входами цифро-аналогового перетворювача об'єкта керування, яка відрізняється тим, що містить блок відмовостійких сервоприводів, блок відмовостійких давачів, причому...
Попередній патент: Пристрій для перевезення і монтажу довгомірних конструкцій
Наступний патент: Розчин для глушіння та ремонту свердловин
Випадковий патент: Стенд для вимірювання кута поперечної стійкості машин, що рухаються, методом послідовного зважування