Стенд для вимірювання кута поперечної стійкості машин, що рухаються, методом послідовного зважування
Номер патенту: 122872
Опубліковано: 25.01.2018
Автори: Лебедєв Анатолій Тихонович, Лебедєв Сергій Анатолійович, Коробко Андрій Іванович, Подригало Михайло Абович
Формула / Реферат
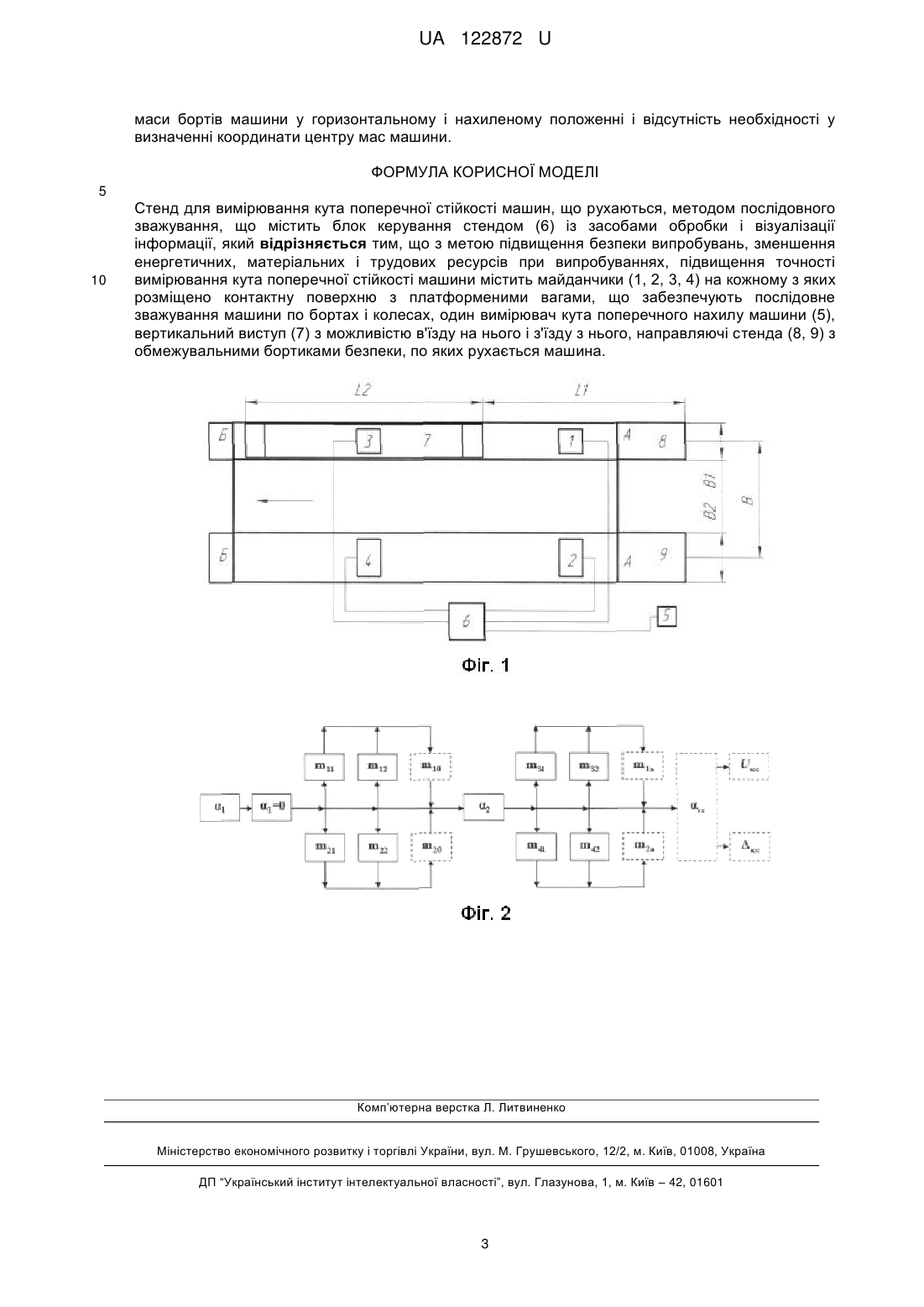
Стенд для вимірювання кута поперечної стійкості машин, що рухаються, методом послідовного зважування, що містить блок керування стендом (6) із засобами обробки і візуалізації інформації, який відрізняється тим, що з метою підвищення безпеки випробувань, зменшення енергетичних, матеріальних і трудових ресурсів при випробуваннях, підвищення точності вимірювання кута поперечної стійкості машини містить майданчики (1, 2, 3, 4) на кожному з яких розміщено контактну поверхню з платформеними вагами, що забезпечують послідовне зважування машини по бортах і колесах, один вимірювач кута поперечного нахилу машини (5), вертикальний виступ (7) з можливістю в'їзду на нього і з'їзду з нього, направляючі стенда (8, 9) з обмежувальними бортиками безпеки, по яких рухається машина.
Текст
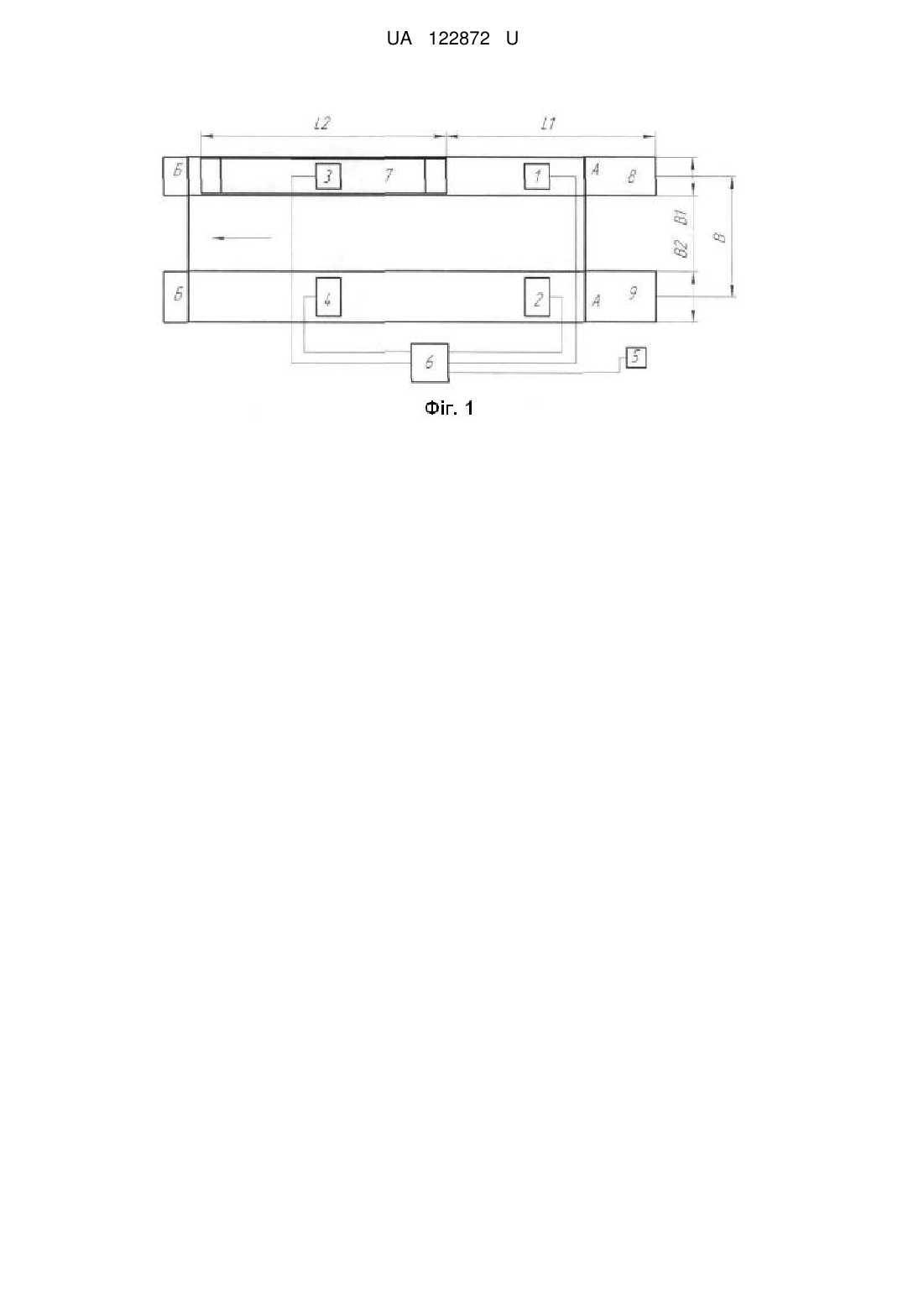
Реферат: Стенд для вимірювання кута поперечної стійкості машин, що рухаються, методом послідовного зважування містить блок керування стендом (6) із засобами обробки і візуалізації інформації. З метою підвищення безпеки випробувань, зменшення енергетичних, матеріальних і трудових ресурсів при випробуваннях, підвищення точності вимірювання кута поперечної стійкості машини містить майданчики (1, 2, 3, 4) на кожному з яких розміщено контактну поверхню з платформеними вагами, що забезпечують послідовне зважування машини по бортах і колесах, один вимірювач кута поперечного нахилу машини (5), вертикальний виступ (7) з можливістю в'їзду на нього і з'їзду з нього, направляючі стенда (8, 9) з обмежувальними бортиками безпеки, по яких рухається машина. UA 122872 U (12) UA 122872 U UA 122872 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до випробувального устаткування для випробувань по визначенню кута поперечної стійкості мобільних (тягових) і причіпних сільськогосподарських машин та автомобілів (далі - машини). Відомо стенд для вимірювання кута поперечної стійкості машин [А. с. СССР 750316 Стенд для определения поперечной устойчивости транспортного средства /Н.И. Аксенов, В.М. Битюцкий, К.М. Герасимов, В.С. Жарков, Э.С. Каыкин, В.М. Соболев, Ю.Г. Светланов, В.Е. Сабанаев и С.Л. Чекалов. Опубликовано 23.07.80. Бюллетень № 27], що має вантажну платформу, яка монтується на фундаменті і змінює кут нахилу до горизонтальної площини, повертаючись навколо своєї горизонтальної осі за допомогою гідроциліндрів. Машина, що випробується, встановлюється на робочій площині платформи таким чином, щоб її поздовжня вісь була паралельною осі повороту платформи. Потім машина фіксується від поперечного зсуву спеціальними упорами і страхується стропами з деяким провисанням. Кут нахилу платформи збільшують плавно доти, доки будь-яке з коліс або гусениць машини не втратить контакт з платформою. У цей момент подальший поворот платформи стенда відносно до горизонтальної осі припиняється. Вимірювальна система стенда фіксує кут нахилу платформи який є граничним кутом поперечної статичної стійкості машини під час її нахилу на відповідний бік. Випробування повторюються з нахилом машини у протилежний бік. Недоліком такого стенда є те, що можливі випадки, коли габаритні розміри машини перевищують розміри робочої площини стенда; значні енергетичні, матеріальні і трудові затрати на придбання і монтаж стенда, установку і закріплення машини, безпосереднє проведення випробувань; випробування на стенді належать до категорії робіт з підвищеною небезпекою. Найближчим аналогом є стенд [Лапшин Н.А., Дьяченко Р.А., Решетняк М.Г. Определение угла поперечной статической устойчивости с помощью мобильного стенда и программы "Устойчивость" //Современные проблемы науки и образования. - 2012. - № 2.], який монтується на тракторі типу ЮМЗ-6 і складається із вантажоприймальних платформ, блока керування вантажоприймальними платформами, давачів кута нахилу, аварійних кінцевих вимикачів, гідростанції для забезпечення нахилу досліджуваного зразка, причепа для розміщення стенда у транспортному положенні. Принцип роботи такого стенда полягає у зважуванні машини в горизонтальному положенні, підніманні машини по бортах почергово на кут до 15°, розрахунку координати положення центру мас машини і розрахунку кута поперечної стійкості машини. Недоліком прототипу є те, що при вимірюванні кута поперечної стійкості машини необхідно проводити розрахунки координат положення центру мас машини, наслідком чого є збільшення похибки непрямих вимірювань кута поперечної стійкості. Точність результатів залежить від того, наскільки точно відносно до подовжньої координати центру мас випробовуваної машини було закріплено підйомне обладнання стенда. Також до недоліків прототипу можна віднести підвищену небезпеку при здійсненні вимірювань внаслідок підйому одного із бортів машини і необхідності утримування його у піднятому положенні. До недоліків також належить те, що машини, які випробовуються повинні мати спеціальні місця для закріплення підйомного обладнання стенда. В основу корисної моделі поставлено задачу підвищення безпеки випробувань, зменшення енергетичних, матеріальних і трудових ресурсів при випробуваннях, підвищення точності вимірювання кута поперечної стійкості машини. Задача вирішується за рахунок того, що стенд для вимірювання кута поперечної стійкості машин, що рухаються, методом послідовного зважування в своїй конструкції містить чотири майданчики для зважування машин окремо по бортах і колесах, напрямні з різною висотою, один вимірювач кута нахилу машини у поперечній площині, а вимірювання кута поперечної стійкості машини і зменшення похибки його вимірювання здійснюється за методом послідовного зважування. На фіг. 1 показано (схематично) загальний вигляд конструкції стенда для випробувань по визначенню кута поперечної стійкості машин, що рухаються, методом послідовного зважування, що містить чотири майданчики 1, 2, 3, 4, на кожному з яких розміщено контактну поверхню з платформеними вагами, вимірювач кута поперечного нахилу машини 5 (наприклад акселерометр), блок керування стендом 6 із засобами обробки і візуалізації інформації, вертикальний виступ 7 з можливістю в'їзду на нього і з'їзду з нього, направляючі стенда 8, 9 з обмежувальними бортиками безпеки, по яких рухається машина. Платформені ваги, що розташовані на майданчиках 1, 2, З, 4 і вимірювач кута поперечного нахилу машини 5 з'єднані із блоком керування стендом 6 вимірювальними каналами. Стрілка вказує напрямок руху машини при випробуванні. Лінія А-А - початкова позиція машини при випробуванні. Лінія Б-Б положення машини після випробувань. В - відстань між центрами направляючих стенда 8 і 9; В1 1 UA 122872 U 5 10 15 20 25 30 35 40 45 50 55 60 і В2 - ширина направляючих стенда 8 і 9, відповідно; L1 - довжина ділянки стенда для зважування машини у горизонтальному положенні; L2 - довжина ділянки стенда для зважування машини у нахиленому положенні. На фіг. 2 показано алгоритм вимірювання кута поперечної стійкості машини, α 1 - кут нахилу машини в початковий момент; m11 - маса машини, що припадає на переднє колесо правого борту, виміряна на майданчику 1; m21 - маса машини, що припадає на переднє колесо лівого борту, виміряна на майданчику 2; m12 - маса машини, що припадає на заднє колесо правого борту, виміряна на майданчику 1; m22 - маса машини, що припадає на заднє колесо лівого борту, виміряна на майданчику 2; 2 - кут нахилу машини при її в'їзді колесами одного борту на вертикальний виступ 7; m31 - маса машини, що припадає на переднє колесо правого борту, виміряна на майданчику 3; m41 - маса машини, що припадає на переднє колесо лівого борту, виміряна на майданчику 4; m32 - маса машини, що припадає на заднє колесо правого борту, виміряна на майданчику 3; m42 - маса машини, що припадає на заднє колесо лівого борту, виміряна на майданчику 4; m1α - маса правого борту машини, виміряна у нахиленому положенні; m2α - маса лівого борту машини, виміряна у нахиленому положенні; cc - кут поперечної стійкості машини; Ucc - невизначеність вимірювання кута поперечної стійкості машини; cc - похибка вимірювання кута поперечної стійкості машини. Сектори позначені неперервними лініями прямі вимірювання. Сектори позначені штриховими лініями - непрямі вимірювання. Стенд для вимірювання кута поперечної стійкості машини, що рухаються, методом послідовного зважування працює наступним чином. Машина, що випробовується встановлюється на направляючі 8 і 9 передніми колесами біля лінії А-А. На машину встановлюється вимірювач кута поперечного нахилу машини 5. Вмикається стенд. Вибирається тип машини: без підвіски, балансирна підвіска, із шарнірноскладеною рамою, автомобіль, машина з однією віссю. Вимірюється кут 1. Калібрується вимірювач кута поперечного нахилу 5 (1=0). Машина починає рух. В момент наїзду машини колесами передньої осі на майданчики 1 і 2, вимірювальна система фіксує результат зважування передньої осі окремо по бортах m11 і m21, відповідно. Машина продовжує рух. В момент наїзду машини колесами задньої осі на майданчики 1 і 2, вимірювальна система фіксує результат зважування задньої осі окремо по бортах m12 і m22. Вимірювальна система розраховує масу бортів машини m10 і m20. Машина продовжує рух і колесами одного борту виїжджає на вертикальний виступ 7. Вимірювальна система фіксує результат вимірювання кута нахилу машини в поперечній площині 2 вимірювачем кута поперечного нахилу 5. В момент наїзду машини колесами передньої осі на майданчики 3 і 4 вимірювальна система фіксує результат зважування передньої осі окремо по бортах m31 і m41, відповідно. Машина продовжує рух. В момент наїзду машини колесами задньої осі на майданчики 3 і 4 вимірювальна система фіксує результат зважування задньої осі окремо по бортах m32 і m42 відповідно. Машина продовжує рух до лінії Б-Б. Вимірювальна система розраховує масу бортів машини у нахиленому положенні m1 і m2, граничне значення кута поперечної стійкості машини cc за авторською методикою, проводиться оцінювання стабільності результатів вимірювання та розраховується невизначеність Ucc і похибка cc вимірювання кута поперечної стійкості машини. З машини знімається вимірювач кута поперечного нахилу 5. Друкується звіт за результатами випробувань. Вимикається стенд. Розміри стенда В, В1, В2 вибираються в залежності від ширини колії і ширини коліс номенклатури машин, що випробовуються. Розміри L1 і L2 вибираються в залежності від довжини колісної бази номенклатури машин, що випробовуються. Висота вертикального виступу 7 вибирається в межах 15-30 см і залежить від ширини колії номенклатури машин, що випробовуються. Контроль стабільності результатів вимірювання проводиться за авторською методикою шляхом порівняння результатів вимірювання кута поперечної стійкості машини отриманих за різними модельними рівняннями вимірювання. Запропонований стенд для вимірювання кута поперечної стійкості машин підвищує безпеку випробувань за рахунок відсутності необхідності підйому машини на критичний кут, утримування машини у піднятому положенні, забезпечує оперативність проведення випробовувань за рахунок скорочення трудоємності виконання робіт з випробувань, забезпечує підвищення точності вимірювання кута поперечної стійкості машини за рахунок відсутності необхідності розрахунку координати положення центру мас машини, забезпечує контроль стабільності результатів вимірювань за рахунок їх порівняння отриманих за різними модельними рівняннями вимірювання. Технічний результат досягається за рахунок використання у конструкції стенда майданчиків з платформеними вагами, одного вимірювача кута поперечного нахилу і вертикального виступу, що забезпечують послідовне вимірювання 2 UA 122872 U маси бортів машини у горизонтальному і нахиленому положенні і відсутність необхідності у визначенні координати центру мас машини. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Стенд для вимірювання кута поперечної стійкості машин, що рухаються, методом послідовного зважування, що містить блок керування стендом (6) із засобами обробки і візуалізації інформації, який відрізняється тим, що з метою підвищення безпеки випробувань, зменшення енергетичних, матеріальних і трудових ресурсів при випробуваннях, підвищення точності вимірювання кута поперечної стійкості машини містить майданчики (1, 2, 3, 4) на кожному з яких розміщено контактну поверхню з платформеними вагами, що забезпечують послідовне зважування машини по бортах і колесах, один вимірювач кута поперечного нахилу машини (5), вертикальний виступ (7) з можливістю в'їзду на нього і з'їзду з нього, направляючі стенда (8, 9) з обмежувальними бортиками безпеки, по яких рухається машина. Комп’ютерна верстка Л. Литвиненко Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01B 5/24, G01M 1/00, G01M 17/00
Мітки: стенд, стійкості, послідовного, машин, методом, вимірювання, кута, зважування, рухаються, поперечної
Код посилання
<a href="https://ua.patents.su/5-122872-stend-dlya-vimiryuvannya-kuta-poperechno-stijjkosti-mashin-shho-rukhayutsya-metodom-poslidovnogo-zvazhuvannya.html" target="_blank" rel="follow" title="База патентів України">Стенд для вимірювання кута поперечної стійкості машин, що рухаються, методом послідовного зважування</a>
Стенд для вимірювання кута поперечної стійкості машин методом послідовного зважування
Номер патенту: 122871
Опубліковано: 25.01.2018
Автори: Подригало Михайло Абович, Коробко Андрій Іванович, Лебедєв Анатолій Тихонович, Лебедєв Сергій Анатолійович
МПК: G01B 5/24, G01M 1/00, G01M 17/00
Мітки: стійкості, методом, зважування, поперечної, кута, машин, послідовного, вимірювання, стенд
Формула / Реферат:
Стенд для вимірювання кута поперечної стійкості машин методом послідовного зважування, що містить привід стенда (4), блок управління (5) із засобами вводу-виводу і візуалізації інформації, який відрізняється тим, що з метою підвищення безпеки випробувань, зменшення енергетичних, матеріальних і трудових ресурсів при випробуваннях підвищення точності вимірювання кута поперечної стійкості машини містить дві (на кожен борт машини) платформи (1...
Спосіб вимірювання кута поперечної статичної стійкості тягово-транспортних причіпних машин
Номер патенту: 119256
Опубліковано: 25.09.2017
Автори: Радченко Юлія Андріанівна, Лебедєв Анатолій Тихонович, Назарко Ольга Олександрівна, Подригало Михайло Абович, Лебедєв Сергій Анатолійович, Коробко Андрій Іванович
МПК: G01M 17/007, G01M 17/06
Мітки: причіпних, спосіб, статичної, тягово-транспортних, поперечної, кута, вимірювання, стійкості, машин
Формула / Реферат:
Спосіб вимірювання кута поперечної статичної стійкості тягово-транспортних і причіпних машин, що полягає у зважуванні бортів машини у горизонтальному положенні, підйомі одного із бортів на довільний кут, зважуванні бортів машини у нахиленому положенні, який відрізняється тим, що проводиться вимірювання кута, на який здійснено підйом одного із бортів машини, і за показником коефіцієнта приросту ваги за спеціальною таблицею визначається кут...
Пристрій для визначення граничного кута поперечної статичної стійкості мобільних машин

Номер патенту: 47748
Опубліковано: 25.02.2010
Автори: Терещук Зоя Михайлівна, Митрофанов Олександр Петрович, Лілевман Ігор Йосипович, Лілевман Олександр Йосипович
МПК: G01M 1/00
Мітки: пристрій, кута, машин, поперечної, стійкості, визначення, статичної, граничного, мобільних
Формула / Реферат:
1. Пристрій для визначення граничного кута поперечної статичної стійкості мобільних машин, що містить рухому частину з робочою площиною (1), яка може повертатися навколо горизонтальної осі, механізм її повертання (2) і маятниковий кутомір (3), який встановлюється на цій площині, який відрізняється тим, що є переносним і малогабаритним, забезпечує визначення граничного кута поперечної статичної стійкості методом моделювання контуру опорної...
Спосіб визначення граничного кута поперечної статичної стійкості колісних машин із застосуванням фізичного моделювання
Номер патенту: 101877
Опубліковано: 13.05.2013
Автори: Лілевман Ігор Йосипович, Подольський Михайло Ігорович, Лілевман Олександр Йосипович, Кучеренко Володимир Григорович, Митрофанов Олександр Петрович
МПК: G01B 5/24, G09B 23/04, G01M 1/00
Мітки: машин, застосуванням, стійкості, спосіб, кута, поперечної, граничного, визначення, колісних, статичної, фізичного, моделювання
Формула / Реферат:
1. Спосіб визначення граничного кута поперечної статичної стійкості колісних машин із застосуванням фізичного моделювання, що полягає у визначенні кутів між горизонтальною площиною і площиною опори машини, коли машина перебуває у стані нестійкої рівноваги в результаті її поперечного нахилу на лівий або правий бік, і виборі найменшого з кутів як оцінного значення, який відрізняється тим, що на першому етапі визначення з горизонтально...
Стенд для визначення поперечної статичної стійкості транспортного засобу
Номер патенту: 26276
Опубліковано: 10.09.2007
Автори: Митрофанов Олександр Петрович, Лілевман Ігор Йосипович, Бондарєв Євгеній Ілліч
МПК: G01P 1/00
Мітки: статичної, засобу, стенд, поперечної, визначення, транспортного, стійкості
Формула / Реферат:
1. Стенд для визначення поперечної статичної стійкості транспортного засобу, що складається з вантажної платформи, встановленої на опорах, насосної станції, яка через гідролінії з'єднана з гідроциліндрами, що нахиляють платформу, на якій встановлено транспортний засіб, до якого прикріплено страхувальні ланцюги, та упори і кутомір, що встановлені на платформі, який відрізняється тим, що у вантажній платформі, під переднім і заднім колесами...
Попередній патент: Стенд для вимірювання кута поперечної стійкості машин методом послідовного зважування
Наступний патент: Спосіб позапічної обробки сталі в ковші
Випадковий патент: Спосіб отримання модифікованого епоксикомпозитного покриття