Система керування космічним літальним апаратом
Номер патенту: 67029
Опубліковано: 15.06.2004
Автори: Погудін Андрій Володимирович, Бандура Іван Миколайович, Батаєв Віктор Олександрович, Овсяннікова Ірина Валеріївна

Формула / Реферат
Система керування космічним літальним апаратом, що містить датчик кута та датчик кутових швидкостей, які з'єднані через перший і другий масштабні блоки з формувачем закону керування, і підсилювач потужності, яка відрізняється тим, що в неї введені послідовно включені інтегратор, порівнюючий пристрій, з'єднаний через підсилювач потужності з ротором електродвигуна, на роторі встановлений тахометр, який з'єднаний з другим входом порівнюючого пристрою.
Текст
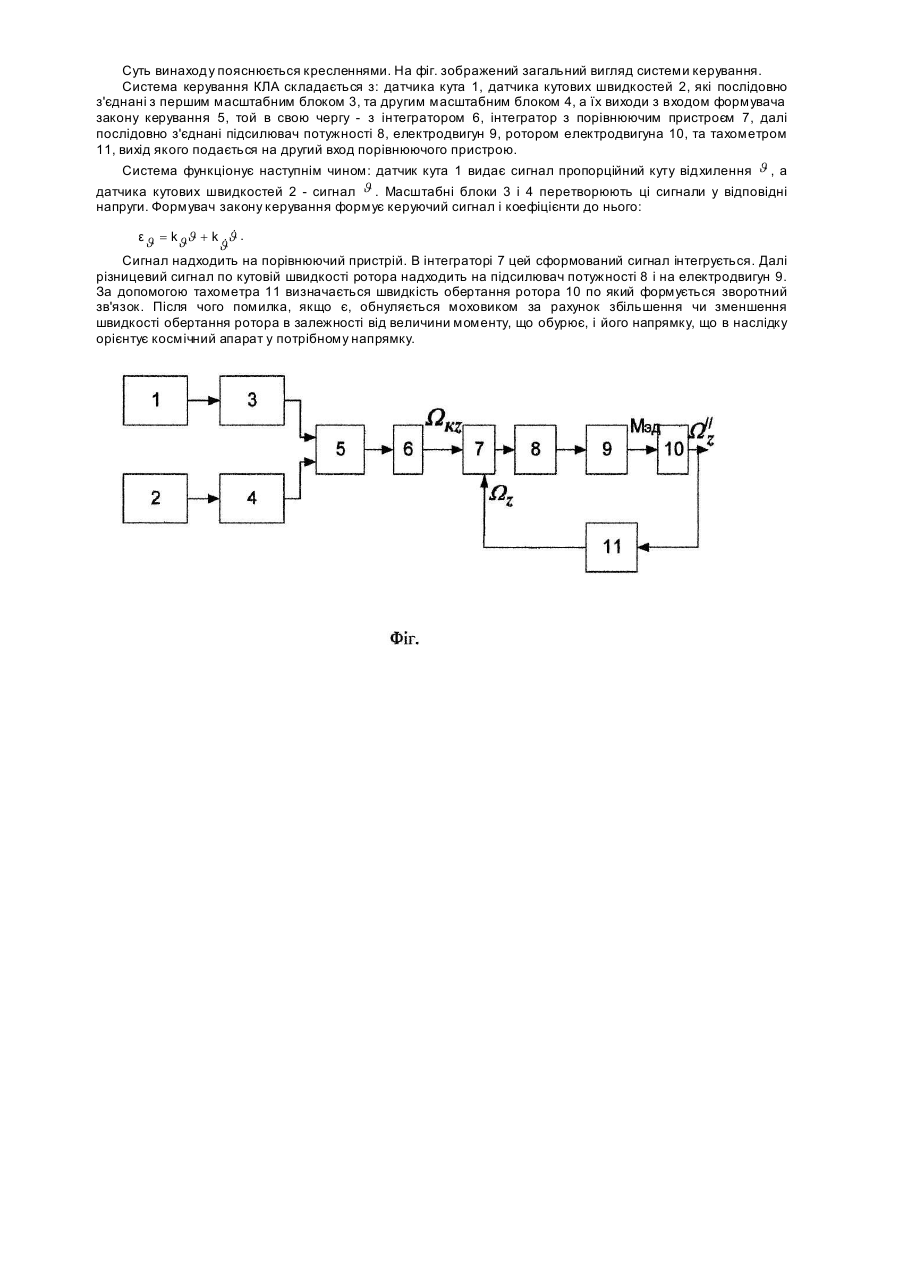
Винахід відноситься до автоматичного керування, зокрема до керування рухом космічного літального апарата (КЛА) навколо центра мас. Відома система керування КЛА (Патент Російської Федерації №2052369, МПК6 В 64 G1/24, опублікований 20.01.96, бюлетень №2) , що містить засіб демпфірування кутового руху КЛА по каналах крену і рискання, виконана у вигляді триступеневого гіростабілізатора, зв'язаного з корпусом КЛА через пружний-грузлий підвіс. Недоліком такої системи є те, що канал керування по тангажу розв'язаний із взаємозалежними каналами крену-рискання і для демпфірування коливань по тангажу потрібно введення спеціальних засобів для прямого чи непрямого визначення кутової швидкості і формування впливу, що демпфірує. Так, наприклад, для формування сигналу, що демпфірує, використовують сигнал з тахогенератора електродвигуна-маховика з лінійним керуванням швидкості обертання. Відома система для стабілізації кутового руху КЛА з пружними виносними элементами (Патент Російської Федерації №2020113, МПК6 В 64 G1/24, опублікований 30.09.94, бюлетень №8), що містить засіб демпфірування кутової швидкості руху апарата по каналах крену і/чи рискання, для демпфірування коливань по каналу тангажа засобами гасіння кутови х швидкостей апарата по каналах крену і/чи рискання, поперечний переріз пружного виносного елемента виконаного з нерівними головними моментами інерції, розташованого паралельно вектору згинаючого моменту, що виникає при коливальному кутовому русі апарата навколо осі тангажа, і розгорнутого навколо осі, перпендикулярної площині згаданого поперечного перерізу на розрахунковий кут, при цьому розрахункова величина кута між сусідніми головними центральними осями інерції поперечного перерізу до 60 градусів. Недоліком цієї системи є коливання КЛА навколо осі тангажа, які забезпечують косий вигін штанги пружних виносних елементів. Відома найбільш близька в технічному змісті система керування космічного апарата (Патент Російської Федерації №2058921, МПК6 В 64 G1/24, опублікований 27.04.96, бюлетень №12) - прототип, який містить датчик кута, датчик кутови х швидкостей, перший і другий масштабні блоки, формувач закону керування, підсилювач потужності, блок виконавчих органів, обмежник тривалості сигналу на вимикання керування і компенсатор запізнювання виконавчих органів на відключення. Датчик кута та датчик кутової швидкості з'єднані з першим і другим масштабними блоками, виходи яких подаються на формувач закону керування, його вихід з’єднаний з підсилювачем потужності і з обмежником тривалості сигналу на вимикання керування та з компенсатором запізнювання виконавчих органів на відключення, вихід обмежника тривалості сигналу на вимикання керування подається на вхід формувач закону керування, а вихід підсилювача потужності подається на вхід блока виконавчих органів. В цій системі реалізована компенсація запізнювання. Недолік прототипу полягає в низькій якості керування із-за відсутності негативного зворотного зв'язку з виконавчими органами. В основу запропонованого винаходу покладена силова стабілізація за допомогою маховиків з використанням негативного зворотного зв'язку для забезпечення кращої точності і якості керування. КЛА стабілізується в орбітальній системі координат трьома маховиками, у яких осі обертання роторів рівнобіжні осям ΟΧ, ΟΥ, ΟΖ зв'язаної системи координат. Запропонований винахід полягає у введенні в маховики негативного зворотного зв'язку по кутовій швидкості їхні х роторів. Такий зворотний зв'язок дає можливість регулювати величини кутових швидкостей роторів маховиків щодо заздалегідь обраних постійних значень T Ωc = Ωcx , Ωcy , Ω cz ; ( ) У цьому випадку діючий на КЛА керуючий момент маховиків можна представити сумою дво х складових: My = - Mэ - Мг ; Mэ = Н; М =ω ´Н ; г 0 с Нс = j M × Ωc ; & & Н = jM × Ω ; ( )T ; T Mу = (Муx , М уy , Муz ) ; Mг = (Мгx , Мгy , Мгz ); & & & & Ω = (Ω x , Ω y , Ω z ); T ω = (ω оx , ωоy , ωоz ) 0 , де Mэ = Мэx , Мэy , Мэz Mэ - момент електродвигунів вхідних до складу маховиків; Mг - гіроскопічний момент; jM - осьовий момент інерції роторів маховиків; ω 0 - орбітальна кутова швидкість КЛА. My Суть винаходу пояснюється кресленнями. На фіг. зображений загальний вигляд системи керування. Система керування КЛА складається з: датчика кута 1, датчика кутових швидкостей 2, які послідовно з'єднані з першим масштабним блоком 3, та другим масштабним блоком 4, а їх виходи з входом формувача закону керування 5, той в свою чергу - з інтегратором 6, інтегратор з порівнюючим пристроєм 7, далі послідовно з'єднані підсилювач потужності 8, електродвигун 9, ротором електродвигуна 10, та тахометром 11, вихід якого подається на другий вход порівнюючого пристрою. Система функціонує наступнім чином: датчик кута 1 видає сигнал пропорційний куту відхилення J , а датчика кутових швидкостей 2 - сигнал J . Масштабні блоки 3 і 4 перетворюють ці сигнали у відповідні напруги. Формувач закону керування формує керуючий сигнал і коефіцієнти до нього: & ε J = kJJ + k &J . J Сигнал надходить на порівнюючий пристрій. В інтеграторі 7 цей сформований сигнал інтегрується. Далі різницевий сигнал по кутовій швидкості ротора надходить на підсилювач потужності 8 і на електродвигун 9. За допомогою тахометра 11 визначається швидкість обертання ротора 10 по який формується зворотний зв'язок. Після чого помилка, якщо є, обнуляється моховиком за рахунок збільшення чи зменшення швидкості обертання ротора в залежності від величини моменту, що обурює, і його напрямку, що в наслідку орієнтує космічний апарат у потрібному напрямку.
ДивитисяДодаткова інформація
Назва патенту англійськоюControl system of a spaceship
Автори англійськоюBandura Ivan Mykolaiovych
Назва патенту російськоюСистема управления космическим летательным аппаратом
Автори російськоюБандура Иван Николаевич
МПК / Мітки
МПК: B64G 1/24
Мітки: система, апаратом, космічним, літальним, керування
Код посилання
<a href="https://ua.patents.su/2-67029-sistema-keruvannya-kosmichnim-litalnim-aparatom.html" target="_blank" rel="follow" title="База патентів України">Система керування космічним літальним апаратом</a>
Система управління літальним апаратом
Номер патенту: 63736
Опубліковано: 15.01.2004
Автори: Субота Анатолій Максимович, Симонов Володимир Федорович, Бандура Іван Миколайович
МПК: B64C 13/00
Мітки: літальним, апаратом, система, управління
Формула / Реферат:
Система управління літальним апаратом, яка містить важіль управління, завантажувальну пружину, датчик кутового положення важеля управління, обчислювач, сервопривід керма висоти, датчик кута тангажа, датчик кутової швидкості і датчик кутового прискорення літального апарата, яка відрізняється тим, що в ній до датчика кутового положення важеля управління під'єднано перший диференціюючий пристрій, вихід якого під'єднано до входу обчислювача і до...
Спосіб керування літальним апаратом та зміни його аеродинамічної компоновки і система керування
Номер патенту: 55253
Опубліковано: 17.03.2003
Автори: Сайног Максим Борисович, Доценко Борис Іванович, Семенов Леонід Антонович, Яковенко Петро Олексійович, Кузьмін В'ячеслав Павлович, Комендантова Людмила Степанівна, Егліт Микола Олександрович, Косовенко Євген Вікторович, Смішко Григорій Павлович
МПК: F42B 15/01
Мітки: зміни, літальним, аеродинамічної, апаратом, керування, спосіб, компоновки, система
Формула / Реферат:
1. Спосіб керування літальним апаратом та зміни його аеродинамічного компонування, який полягає у зміні кількості рулів, що беруть участь у процесі керування літальним апаратом, який відрізняється тим, що здійснюють одночасне розкривання двох пар рулів і приведення в дію першої пари рулів для керування по тангажу і (або) рисканню, а другу пару рулів утримують під нульовим кутом, використовуючи їх як стабілізатори, поки виконується...
Обчислювальна система візуального керування літальним апаратом
Номер патенту: 56876
Опубліковано: 15.05.2003
Автори: Гусятін Володимир Михайлович, Янковський Олександр Аркадійович
МПК: G06F 7/548, B64F 1/00
Мітки: система, візуального, керування, літальним, апаратом, обчислювальна
Формула / Реферат:
Обчислювальна система візуального керування літальним апаратом, що містить формувач сигналів зображення і блок керування, яка відрізняється тим, що в неї введені графічний спецпроцесор для систем візуалізації, блок обчислень по 3D-об'єктах, блок зв'язку з бортовим комп'ютером, зв'язаний двоспрямовано з блоком керування, перший пристрій для обчислення швидких геометричних перетворень, зв'язаний двоспрямовано з блоком керування і з’єднаний...
Система управління літальним апаратом
Номер патенту: 13078
Опубліковано: 28.02.1997
Автори: Орепер Володимир Якович, Конев Валерій Тимофійович, Абрамов Євген Ілліч
МПК: B64C 13/00
Мітки: управління, літальним, апаратом, система
Формула / Реферат:
(57) 1. Система управления летательным аппаратом, содержащая рычаг управления, электродистанционный канал управления, включающий вычислитель, сервопривод и датчик усилий, установленный между рычагом и проводкой управления, и механический канал управления, включающий проводку управления и резервную загрузочную пружину и привод руля, отличающаяся тем, что в ней параллельно рычагу управления к датчику усилий подсоединено пружинное устройство...
Спосіб управління літальним апаратом
Номер патенту: 32455
Опубліковано: 15.12.2000
Автори: Шепелев Юрій Іванович, Семенов Леонід Антонович, Корольов Анатолій Миколайович, Бондарчук Павло Степанович, Коростельов Олег Петрович, Яковенко Петро Олексійович, Кузьмін В'ячеслав Павлович, Смішко Григорій Павлович, Доценко Борис Іванович, Косовенко Євген Вікторович
Мітки: літальним, управління, апаратом, спосіб
Текст:
...значень коефіцієнта шар нірного моменту (наприклад, за допомогою вибору геометричних параметрів руля та розташування, осі його повороту), моменту інерції рульового приводу з рулями відносно їх осі повороту, частоти обертання літального апарата навколо його подовженої осі (наприклад, за допомогою початкового кута установки крил або сопел двигуна) та моменту уз годжувального імітатора додаткового моменту. Одна з можливи х конструктивних схем...
Попередній патент: Мобільний агрегат для гасіння пожежі на фонтануючій газонафтовій свердловині мілінського ю.м.
Наступний патент: Установка для очищення забрудненого повітря пташників з рециркуляцією
Випадковий патент: Спосіб очистки внутрішньої порожнини трубопроводу