Диференціальний індуктивний датчик зусиль
Формула / Реферат
Диференціальний індуктивний датчик зусиль, що містить дві пари магнітопроводів з котушками, розташованими симетрично відносно прохідного якоря з протилежного боку на осях, зміщених від торців прохідного якоря у напрямку від його центру на відстань, що дорівнює половині радіуса магнітопроводу з котушкою, причому магнітопроводи з котушками розміщені на одних осях і через підсилювально-перетворювальні канали зв'язані з входом диференціального підсилювача через суматор, який відрізняється тим, що датчик забезпечений додатковим суматором, підключеним входами через додаткові диференціальні підсилювачі до виходів підсилювально-перетворювальних каналів.
Текст
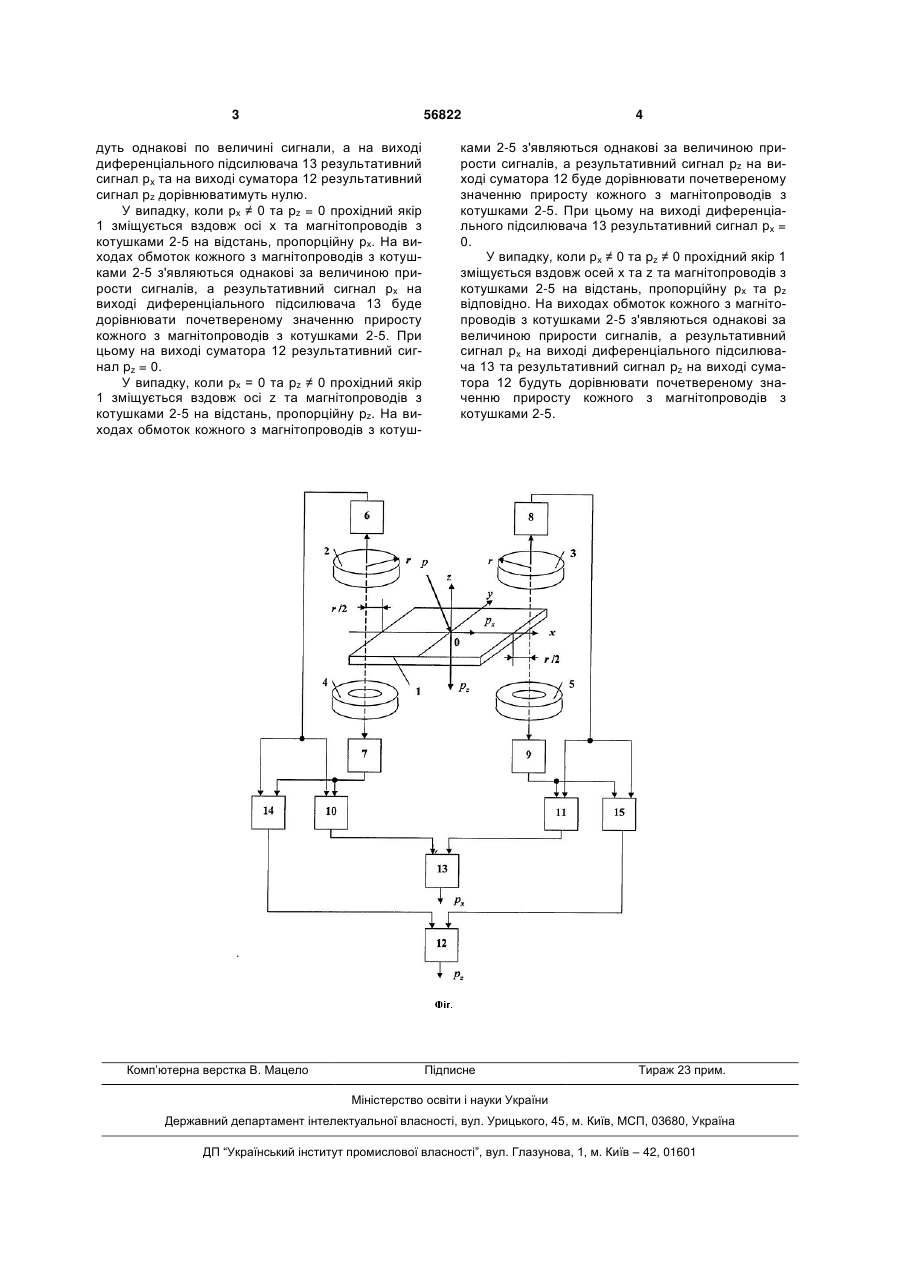
Диференціальний індуктивний датчик зусиль, що містить дві пари магнітопроводів з котушками, розташованими симетрично відносно прохідного якоря з протилежного боку на осях, зміщених від 3 56822 дуть однакові по величині сигнали, а на виході диференціального підсилювача 13 результативний сигнал рх та на виході суматора 12 результативний сигнал pz дорівнюватимуть нулю. У випадку, коли рх ≠ 0 та pz = 0 прохідний якір 1 зміщується вздовж осі х та магнітопроводів з котушками 2-5 на відстань, пропорційну рх. На виходах обмоток кожного з магнітопроводів з котушками 2-5 з'являються однакові за величиною прирости сигналів, а результативний сигнал рх на виході диференціального підсилювача 13 буде дорівнювати почетвереному значенню приросту кожного з магнітопроводів з котушками 2-5. При цьому на виході суматора 12 результативний сигнал pz = 0. У випадку, коли рх = 0 та pz ≠ 0 прохідний якір 1 зміщується вздовж осі z та магнітопроводів з котушками 2-5 на відстань, пропорційну pz. На виходах обмоток кожного з магнітопроводів з котуш Комп’ютерна верстка В. Мацело 4 ками 2-5 з'являються однакові за величиною прирости сигналів, а результативний сигнал pz на виході суматора 12 буде дорівнювати почетвереному значенню приросту кожного з магнітопроводів з котушками 2-5. При цьому на виході диференціального підсилювача 13 результативний сигнал рх = 0. У випадку, коли рх ≠ 0 та pz ≠ 0 прохідний якір 1 зміщується вздовж осей х та z та магнітопроводів з котушками 2-5 на відстань, пропорційну рх та pz відповідно. На виходах обмоток кожного з магнітопроводів з котушками 2-5 з'являються однакові за величиною прирости сигналів, а результативний сигнал рх на виході диференціального підсилювача 13 та результативний сигнал pz на виході суматора 12 будуть дорівнювати почетвереному значенню приросту кожного з магнітопроводів з котушками 2-5. Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDifferential inductive force sensor
Автори англійськоюSmyrnyi Mykhailo Fedorovych
Назва патенту російськоюДифференциальный индуктивный датчик усилий
Автори російськоюСмирный Михаил Федорович
МПК / Мітки
МПК: G01L 9/00
Мітки: диференціальний, індуктивний, зусиль, датчик
Код посилання
<a href="https://ua.patents.su/2-56822-diferencialnijj-induktivnijj-datchik-zusil.html" target="_blank" rel="follow" title="База патентів України">Диференціальний індуктивний датчик зусиль</a>
Диференціальний індуктивний датчик зусиль
Номер патенту: 55510
Опубліковано: 10.12.2010
Автор: Смірний Михайло Федорович
МПК: G01L 9/00
Мітки: індуктивний, диференціальний, зусиль, датчик
Формула / Реферат:
Диференціальний індуктивний датчик зусиль, що містить дві пари магнітопроводів з котушками, розташованих симетрично відносно прохідного якоря з протилежного боку на осях, зміщених від торців прохідного якоря у напрямку від його центру на відстань, що дорівнює половині радіуса магнітопроводу з котушкою, причому магнітопроводи з котушками, розміщені на одних осях, через підсилювально-перетворювальні канали зв'язані з входом диференціального...
Диференціальний індуктивний датчик зусиль
Номер патенту: 50564
Опубліковано: 10.06.2010
Автор: Смірний Михайло Федорович
Мітки: зусиль, диференціальний, датчик, індуктивний
Формула / Реферат:
Диференціальний індуктивний датчик зусиль, що містить першу пару магнітопроводів з котушками, розміщену по один бік прохідного якоря у зонах його протилежних торців, який відрізняється тим, що у датчику розташовано другу пару магнітопроводів з котушками симетрично відносно прохідного якоря з протилежного боку на осях, зміщених від торців прохідного якоря у напрямку від його центра на відстань, що дорівнює половині радіуса магнітопроводу з...
Диференційний індуктивний датчик тиску
Номер патенту: 59947
Опубліковано: 15.09.2003
Автори: Дядичев Валерій Володимирович, Смірний Михайло Федорович
Мітки: диференційний, тиску, індуктивний, датчик
Формула / Реферат:
Диференційний індуктивний датчик тиску, що містить одну пару магнітопроводів з котушками, розміщених по один бік плоского прохідного якоря в зонах його протилежних торців, який відрізняється тим, що датчик забезпечений другою парою магнітопроводів з котушками, встановленими з протилежного боку прохідного якоря, симетрично першій парі магнітопроводів з котушками, на осях, зміщених щодо торців прохідного якоря в напрямку від його центра на...
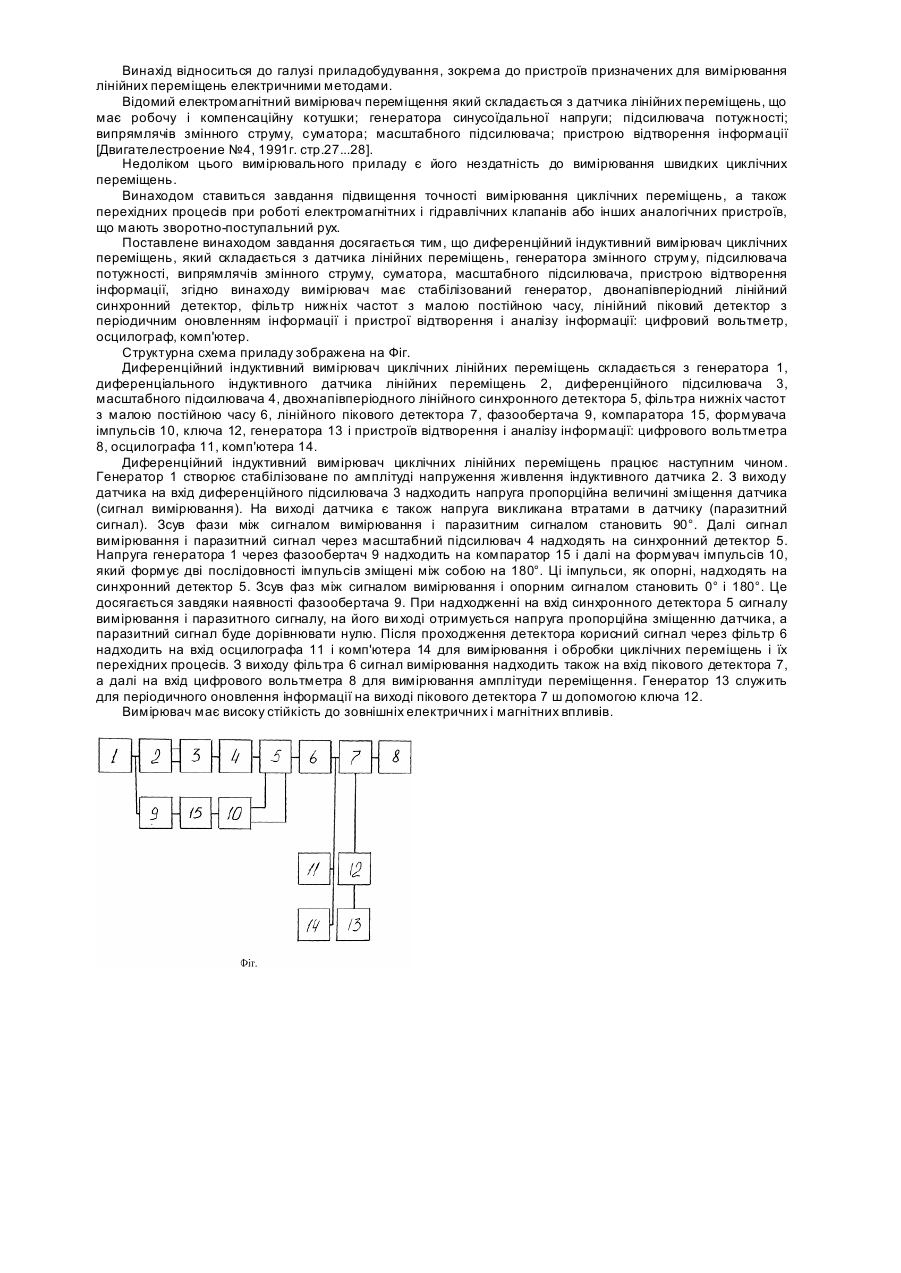
Диференціальний індуктивний вимірювач циклічних лінійних переміщень
Номер патенту: 79143
Опубліковано: 25.05.2007
Автори: Мягков Валерій Іванович, Філіппов Анатолій Захарович, Топчій Сергій Іванович, Герасимчук Юрій Анатолійович
Мітки: диференціальний, індуктивний, переміщень, лінійних, циклічних, вимірювач
Формула / Реферат:
Диференціальний індуктивний вимірювач циклічних лінійних переміщень, який відрізняється тим, що містить послідовно з’єднані стабілізований генератор, диференціальний індуктивний датчик лінійних переміщень, диференціальний підсилювач, масштабний підсилювач, двонапівперіодний лінійний синхронний детектор, фільтр нижніх частот з малою постійною часу, лінійний піковий детектор і цифровий вольтметр, при цьому до генератора підключені послідовно...
Індуктивний датчик вібрації
Номер патенту: 17151
Опубліковано: 15.09.2006
Автори: Решетняк Юрій Степанович, Тартишев Ігор Григорович, Єремєєв Олександр Андрійович, Рудакова Ганна Володимирівна, Сєров Олександр Володимирович
МПК: G01H 11/00
Мітки: індуктивний, вібрації, датчик
Формула / Реферат:
Індуктивний датчик вібрацій, що містить корпус і розміщені в ньому на ізоляційній втулці вимірювальну котушку, постійний магніт, який відрізняється тим, що додатково містить вимірювальну котушку на ізоляційній втулці й постійний магніт, причому внутрішня поверхня втулок і зовнішня поверхня магнітів забезпечені антифрикційним покриттям, а вимірювальні котушки, постійні магніти й втулки розташовані перпендикулярно один до одного на різних...
Попередній патент: Модифікатор для обробки мідного розплаву
Наступний патент: Спосіб одержання нітридної плівки
Випадковий патент: Спосіб усунення ігрової залежності